Моделирование вибраций и ударов в виноградной грозди: ключ к снижению потерь при механизированной уборке
В процессе производства столового винограда серьёзной проблемой являются осыпание и повреждение ягод, вызванные вибрацией гроздей и столкновениями ягод между собой. Для исследования механизмов и динамики этих явлений был разработан метод учета вибрационно-ударного взаимодействия для гроздей столового винограда. На основе вибрационной модели виноградной грозди была предложена наименьшая единица анализа такого взаимодействия — система «двойная плодоножка — ягода». Эта система описана с помощью модели «(вязкоупругий шарнир) — (жесткий стержень) — (упругий сферический элемент) — (вязкоупругая связь)».
Аннотация
Динамическое уравнение, описывающее вибрационно-ударное взаимодействие в системе «двойная плодоножка — ягода», было выведено путем включения в рамках уравнений Лагранжа выражений для вязкоупругих колебаний плодоножек, вязкоупругого соударения ягод и обобщенной ударной силы (основанной на модели Кельвина). Также был разработан вычислительно-имитационный метод для решения этого динамического уравнения.
Результаты моделирования показали, что характер вибрационно-ударного взаимодействия, по сравнению с режимом чистой вибрации (без учета соударений), характеризуется более коротким периодом колебаний, меньшей их амплитудой, но более высокой частотой. Уменьшение амплитуды вибрации снижает риск отрыва ягод из-за чрезмерных мгновенных нагрузок. Однако увеличение частоты колебаний усугубляет отрыв ягод вследствие усталостных явлений и вызывает повреждения ягод различной степени.
Данное исследование закладывает теоретическую основу для понимания механизмов отрыва и повреждения ягод, предоставляя ценную информацию для смягчения этих проблем в производстве столового винограда.
1. Введение
Мировое производство винограда значительно расширилось за последние 40 лет. Согласно данным Продовольственной и сельскохозяйственной организации Объединенных Наций (ФАО), общий объем производства винограда в 2019 году достиг 77,137 миллионов тонн, причем на столовый виноград пришлось приблизительно 33% этого объема [1]. Однако традиционные механические методы для производства столового винограда непригодны из-за их склонности причинять повреждения, что требует значительных трудовых затрат для обеспечения безударного обращения. Процесс производства столового винограда включает сбор урожая, послеуборочные операции, такие как сортировка, упаковка, транспортировка и другие операции обращения как на уровне фермы, так и на промышленном уровне [2,3]. Среди этих проблем отрыв и повреждение ягод во время обращения значительно сокращают срок хранения и товарность гроздей столового винограда [4]. В отличие от отдельных плодов, целостность и сохранность плодовых гроздей являются критически важными показателями качества столового винограда. Во время производства потери из-за отрыва ягод и повреждений, вызванных вибрациями гроздей и столкновениями ягод между собой, могут достигать от 20% до 30% [5]. Эти проблемы серьезно подрывают коммерческую ценность столового винограда, и решение проблем отрыва и повреждения ягод стало, таким образом, ключевым узким местом в производственно-сбытовой цепочке свежего столового винограда.
Существуют различные подходы к смягчению отрыва и повреждения ягод во время производства винограда. В настоящее время в виноградной отрасли широко применяются химические методы [6], в основном сосредоточенные на антиоксидантных свойствах во время хранения [7,8,9] и влиянии грибков на сохранность винограда [10,11,12]. Однако в последние годы все больше внимания уделяется нехимическим методам. Исследователи стремились понять взаимосвязь между механической уборкой и повреждением ягод, с целью оптимизации методов механического обращения для снижения отрыва и повреждения ягод. Исследования динамики соударений и повреждения плодов широко проводились для различных типов плодовых ягод [13,14]. Контактная теория Герца и методы виртуального моделирования широко применялись для исследования динамических соударений и вязкоупругих материалов. Исследователи разработали различные уравнения для давления, деформации и энергии для различных типов столкновений, включая столкновения ягода–ягода, падающей ягоды с доской и ягоды с демпфирующим материалом. Эти модели были интегрированы в симуляции на основе метода дискретных элементов (DEM) и метода конечных элементов (FEM) [15,16,17]. Например, в экспериментах с вертикальным сбросом, включающих столкновения ягода–демпфирующий материал, Vinokur и др. [16] показали, что скорость отрыва плода пропорциональна высоте. Традиционные методы измерения столкновений ягод часто непрактичны для определенных сценариев, что привело к принятию косвенных методов, таких как электронный плод, пьезоэлектрические пленки и высокоскоростные камеры [18,19,20]. Pezzi и др. [20] использовали измерительные устройства, такие как электронный плод, для изучения механизмов столкновения ягод во время механической уборки и транспортировки без сложностей прямого измерения. Lu и др. [21] использовали пьезоэлектрические пленки для наблюдения столкновений в гроздях винограда во время испытаний на экстренную остановку и вертикальный сброс. Edward и др. [22] использовали конечно-элементное моделирование для анализа динамического процесса соударения яблок друг с другом или о жесткие поверхности. Аналогично, Bao и др. [23] разработали конечно-элементную модель черники для оценки уровня повреждений с помощью симуляций столкновений. В то время как эти исследования в основном рассматривали столкновения свободно падающих плодов или ягод с поверхностями или между двумя свободными плодами или ягодами, они в значительной степени упускали из виду уникальные ограничения, присутствующие в гроздях столового винограда. Во время сбора урожая и послеуборочного обращения ягоды в грозди остаются прикрепленными к плодоножке, что приводит к столкновениям в условиях ограничения. Такие ограниченные столкновения значительно отличаются от столкновений свободных плодов с точки зрения динамики и сложности. Однако конкретных исследований столкновений ягод в этих условиях ограничения в настоящее время не хватает, что подчеркивает важный пробел в литературе.
Вибрации виноградной грозди играют ключевую роль в механической уборке и послеуборочном обращении столового винограда, поскольку они способствуют отрыву и повреждению ягод. Существующие исследования в основном сосредоточены на четырех областях: колебательное движение грозди, частота вибрации, влияние вибрации и возбуждения на падение плодов и моделирование грозди. Crooke и др. [24] и Ramli и др. [25] предположили, что хотя модели движения плодовых гроздей чрезвычайно сложны, существуют пять основных моделей движения. Многие ученые изучали механические повреждения различных плодов при различных частотах вибрации. Kubilay и др. [26] и Opara и др. [27] провели обширные исследования взаимосвязи между частотой вибрации и механическими повреждениями упакованных яблок. Cao и др. [28] изучали механические повреждения груш Хуангуань при различных частотах вибрации, анализируя взаимосвязь между вибрационным ускорением груш и резонансной частотой испытательного стенда. Zhou и др. [29] исследовали влияние частоты вибрации на движение плода, время отрыва и повреждения во время механической уборки черешни встряхивателем с использованием высокоскоростных камер. Их результаты показали, что более короткие периоды воздействия высоких механических нагрузок вызывали большее повреждение плодов. Fernando и др. [30] изучили механические повреждения бананов, вызванные передачей вибрации и упаковочными материалами, с помощью экспериментальных исследований. Однако эти исследования в значительной степени рассматривают плодовую гроздь как единое целое, пренебрегая внутренними взаимодействиями между отдельными плодами внутри грозди. Эти взаимодействия принципиально отличаются от возбуждения, передачи и вибрационных реакций в сложной плодовой грозди. Чтобы изучить вибрационную реакцию системы грозди, Fischer и др. [31] провели эксперименты по падению ягод упакованного столового винограда при различных частотах вибрации. Они обнаружили, что когда частота вибрации составляла от 5 до 10 Гц, скорость повреждения ягод при столкновении достигала пика. Далее, Liu и др. [32] обнаружили влияние вибраций на скорость падения виноградных гроздей в зависимости от различных позиций удержания во время фаз старта и остановки зажима и при переносе гроздей. Они также определили взаимосвязь между угловым отклонением виноградной грозди и передачей возбуждения с использованием высокоскоростных камер, в дополнение к корреляции между скоростью и ускорением по отношению к вибрации. Чтобы исследовать влияние возбуждения на вибрацию, методы имитационного моделирования оказались ценными в дополнение к экспериментальным методам. Симуляции облегчают изучение маршрутов возбуждения и передачи вибрации внутри грозди и могут предоставить представление о влиянии механического обращения на виноградные грозди. Одним из распространенных подходов к моделированию и симуляции плодовых гроздей является трехмерная реконструкция. Schöler и др. [33] получили данные облака точек системы плодоножек посредством трехмерного сканирования с фенотипической перспективы и реконструировали гроздь столового винограда на основе модели системы кофейная ягода–стебель–ветвь. Huang и др. [34] создали трехмерные модели виноградных гроздей на основе системы Open L, которая может использоваться для корректировки направлений роста главной оси, плодоножки и ягоды для получения различных форм грозди. Однако они сосредоточились только на вибрационных характеристиках отдельных плодов и пренебрегли вибрационным поведением целых плодовых гроздей. Основной целью их трехмерной реконструкции было представление форм растений, что делает ее непригодной для последующего вибрационного анализа. Kondo и др. [35] смоделировали гроздь томатов как систему маятника с двумя степенями свободы. Yiannis и др. [36] построили модель метода дискретных элементов грозди, состоящей из нескольких ягод, для удаления стеблей у гроздей винного винограда. Hoshyarmanesh и др. [37] рассматривали оливковые ветви, основные ветви, побеги и плодоножки как единое целое, трактуя систему плод–стебель как висящий маятник при построении 3D-модели и сборе данных о вибрации. Однако эти исследования рассматривали плодовую гроздь как единую сущность и исследовали возбуждение и частоту вибрации без учета сложностей индивидуальных вибраций плодов внутри грозди, и это упрощение могло упустить критические аспекты динамики отрыва и повреждения ягод. Li и др. [38] создали трехмерную модель виноградной грозди путем дискретизации стебля на сегменты по 5 мм и соединения их втулками для моделирования гибкости виртуальной модели. Они применили модель пружина-демпфер для соединения ягод и стеблей. Однако в модели использовались однородные механические свойства для плода и плодоножки и предполагались жесткие соединения на всех осях, что не отражает фактическую деформацию и изменчивость реальных виноградных гроздей. Такие модели, следовательно, не могут точно описать вибрационные характеристики или поведение отрыва ягод в практических сценариях производства. В предыдущем исследовании [39] мы построили составную механическую модель грозди столового винограда, названную системой «(гибкий стержень)–(вязкоупругий шарнир)–(жесткий стержень)–(жесткий шар)», которая моделирует характеристики передачи возбуждения и вибрации на этапе послеуборочной транспортировки. Модель успешно улавливает вязкоупругие взаимодействия между плодоножками и отдельными ягодами, отражая индивидуальную изменчивость компонентов грозди, при этом результаты показали, что внешние силы сбора могут вызывать сильные вибрации в модели грозди, приводя к отрыву ягод. Точность модели была подтверждена с помощью программного обеспечения для многоконтурной динамики (Adams2018) и реальных экспериментов. Однако эта модель не учитывала столкновения ягода–ягода или влияние вязкоупругости между ягодами, которые являются ключевыми факторами, влияющими на отрыв и повреждение ягод. Чтобы лучше понять механизмы отрыва и повреждения ягод в гроздях столового винограда, крайне важно дальнейшее исследование вибрационно-ударного взаимодействия виноградных гроздей, что могло бы предоставить важные представления для оптимизации обращения с ягодами и снижения повреждений во время механической уборки и послеуборочной обработки.
В предыдущих исследованиях [40] авторы описали модель вибрационно-ударного взаимодействия виноградной грозди с точки зрения конечных элементов; однако предыдущие подходы к моделированию не позволяли напрямую наблюдать вибрации и столкновения внутри грозди, а также были подняты значительные трудности при программировании в MATLAB2016a. Чтобы решить эти проблемы, данное исследование подходит к модели вибрационно-ударного взаимодействия виноградной грозди с точки зрения аналитической механики, в конечном итоге выводя динамическое уравнение вибрационно-ударного взаимодействия на основе уравнения Лагранжа. Новая единица вибрационно-ударного взаимодействия, названная «система двойная плодоножка–ягода», была установлена путем упрощения характеристик грозди столового винограда с учетом вязкоупругих свойств как плодоножек, так и ягод. В результате, динамическое уравнение вибрационно-ударного взаимодействия для системы двойная плодоножка–ягода было получено путем введения выражений для вязкоупругих вибраций плодоножек, вязкоупругих столкновений между ягодами и обобщенной ударной силы (основанной на модели Кельвина) в структуру уравнения Лагранжа. После вывода динамического уравнения была разработана программа моделирования на платформе MATLAB2016a. Дополнительно, было проведено сравнение результатов моделирования и экспериментальных данных для проверки осуществимости модели. Наконец, были сравнены динамические характеристики как режима чистой вибрации, так и режима вибрационно-ударного взаимодействия, что облегчило углубленный анализ механизмов отрыва и повреждения ягод внутри системы двойная плодоножка–ягода.
2. Материалы и методы
2. Материалы и методы
Вибрационно-ударное взаимодействие гроздей столового винограда, а также описание проблемы, моделирование и вычислительный подход представлены в данном разделе.
2.1. Описание проблемы
Во время производства столового винограда различные этапы, такие как уборка в поле (включая сбор, транспортировку и укладку) и послепроизводственные мероприятия (такие как сортировка, упаковка и транспортировка), включают значительное механическое обращение. На протяжении процессов сбора и последующего обращения внешние возбуждения генерируют одновременные вибрации и столкновения внутри виноградной грозди. Эти возбуждения могут включать импульсные, сборочные, ударные и периодические возбуждения, которые прикладываются к главной оси и нижним ягодам, как показано на рисунке 1. Каждый тип возбуждения приводит к различному поведению вибрационно-ударного взаимодействия внутри виноградной грозди, что, в свою очередь, приводит к различным реакциям с точки зрения отрыва ягод и повреждения ягод. Чтобы исследовать основные принципы передачи возбуждения и движения вибрационно-ударного взаимодействия в виноградных гроздьях, были проведены пространственно-временные динамические описания и исследования моделирования. Результаты этих симуляций помогают нам лучше понять механизмы, управляющие падением ягоды и повреждением ягоды, предоставляя представление о том, как внешние силы во время обращения влияют на общую целостность виноградной грозди.
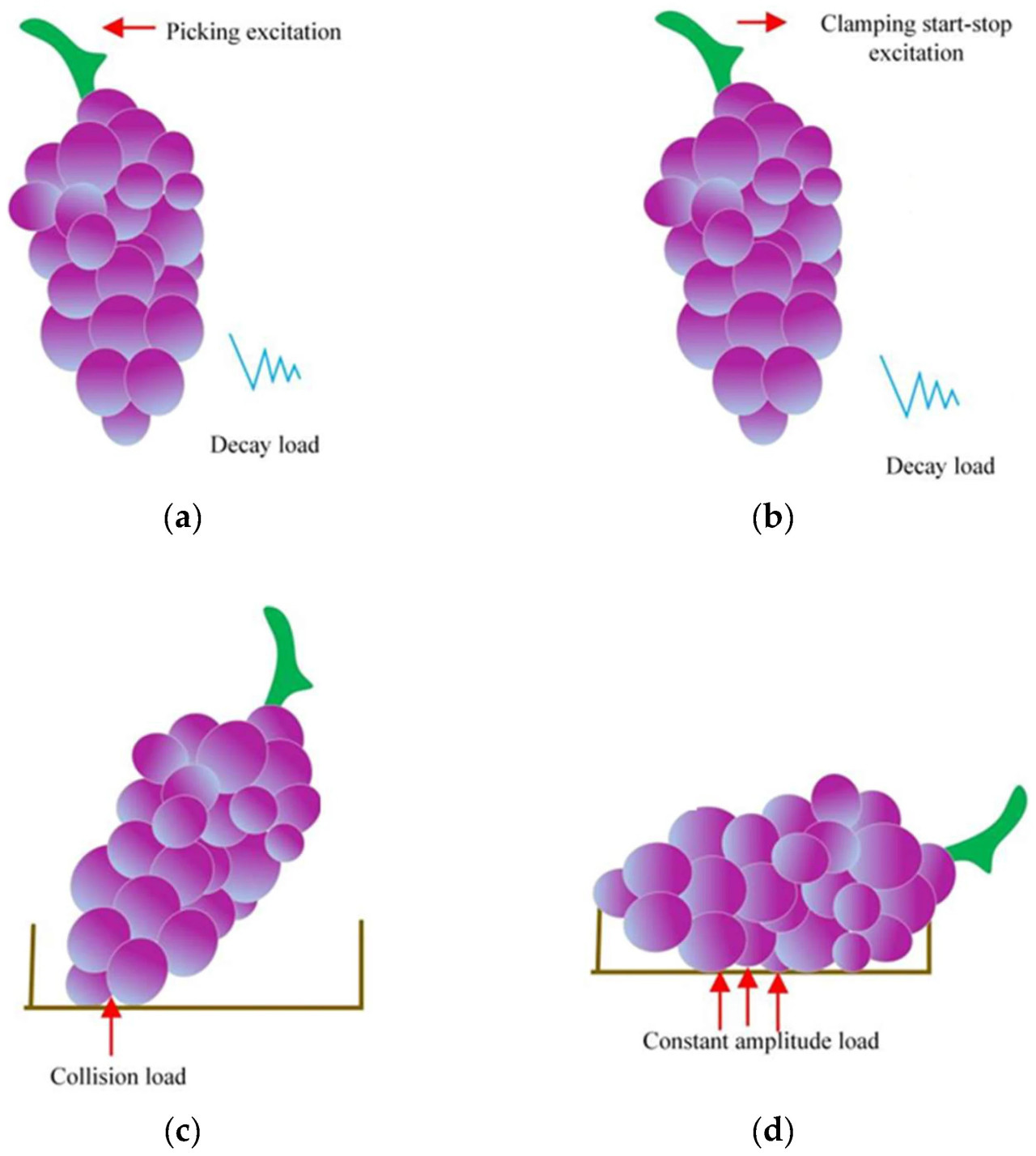
Рисунок 1. Многоуровневое гетерогенное возбуждение в процессе сбора и последующего обращения столового винограда. (a) Сборочное возбуждение; (b) возбуждение при транспортировке в руке; (c) возбуждение при укладке; и (d) возбуждение при дорожной транспортировке.
2.2. Моделирование
2.2.1. Модель вибрационно-ударного взаимодействия системы виноградной грозди
По сравнению с системой одностебельного плода, система плодовой грозди имеет отличительные характеристики (Рисунок 2). Каждая плодовая гроздь прикреплена к главной плодоножке, которая разветвляется на несколько ветвей плодоножек. Каждая ветвь плодоножки далее делится на множество плодовых стебельков, которые соединены с плодовыми частицами через плодоножки [32]. Во время сбора и транспортировки возбуждение передается к плодовым частицам через главную плодоножку, ветви плодоножек и плодовые стебельки. Понимание этих факторов имеет ключевое значение для оптимизации процессов обращения и минимизации потерь во время сбора и послеуборочного обращения.

Рисунок 2. Многоуровневое гетерогенное возбуждение в процессе сбора и последующего обращения столового винограда. (a) Виноградная гроздь и (b) система стебля.
Чтобы описать вибрационное поведение при различных возбуждениях, Liu и др. [32] предложили метод моделирования, названный моделью «(гибкий стержень)–(вязкоупругий шарнир)–(жесткий стержень)–(жесткий шар)», как показано на рисунке 3a. В этой модели главная ось и вторичные оси представлены как гибкий стержень и жесткий стержень соответственно. Плоды случайным образом добавляются на основе нормального распределения диаметров, и свойства первичных и вторичных шарниров также случайно определяются в соответствии с нормальным распределением их коэффициентов упругости и демпфирования. Как показано на рисунке 3b, это приводит к 3D-модели симуляции виноградной грозди с различными компонентами. Однако эта модель не учитывает столкновения между ягодами, что приводит к расхождениям между результатами моделирования и фактическим динамическим поведением виноградной грозди. Чтобы повысить точность модели, необходимо включить вибрационно-ударное взаимодействие внутри виноградной грозди.
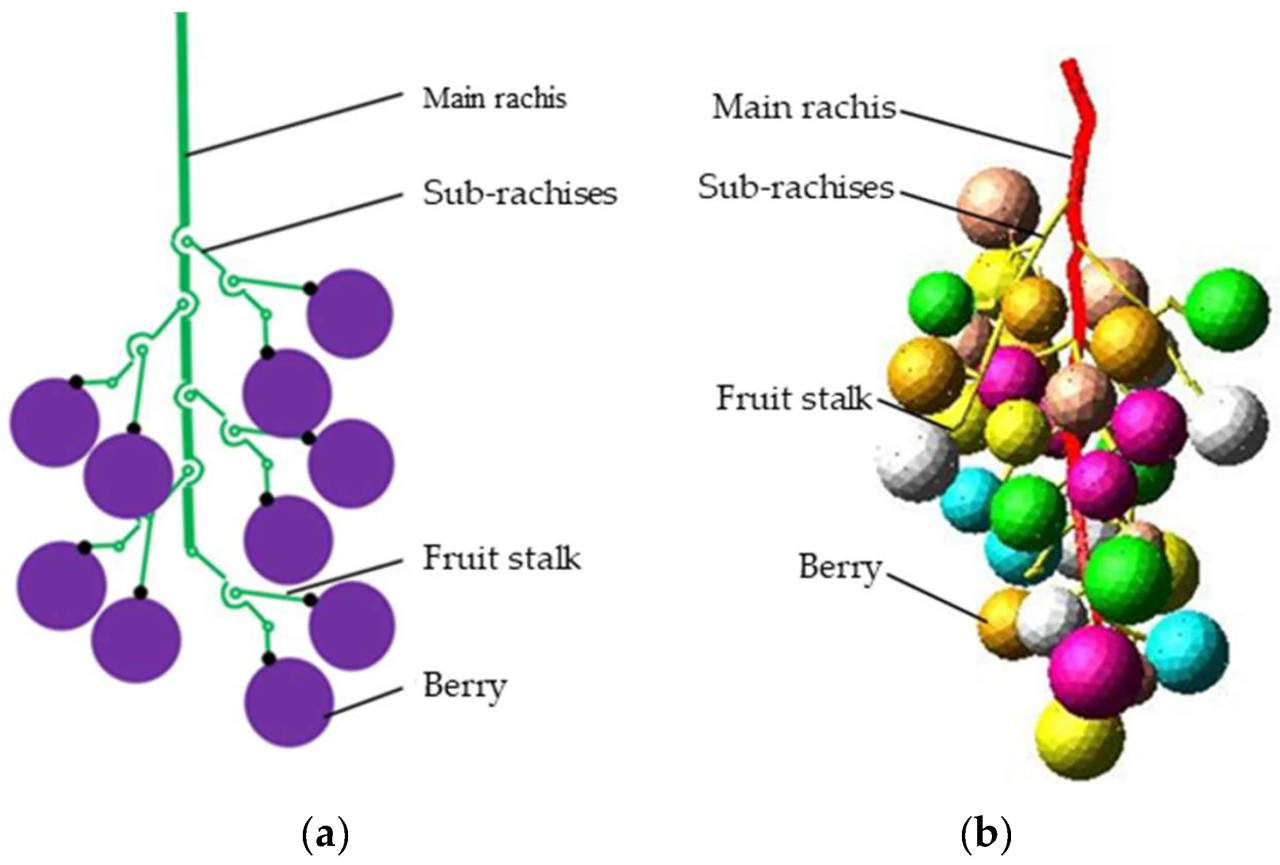
Рисунок 3. Моделирование вибрационно-ударного взаимодействия. (a) Вибрационная модель и (b) 3D-модель симуляции.
2.2.2. Модель вибрационно-ударного взаимодействия системы двойная плодоножка–ягода
Чтобы установить связанную модель вибрации и столкновения на основе модели столкновения (рисунок 3b), ключевым моментом является интегрировать столкновения ягод в вибрационную модель. Таким образом, сначала была разработана модель вибрационно-ударного взаимодействия системы двойная плодоножка–ягода в условиях ограничения виноградной грозди. Система двойная плодоножка–ягода, наименьшая единица вибрационно-ударного взаимодействия, описывается с помощью модели «(вязкоупругий шарнир)–(жесткий стержень)–(упругий шар)–(вязкоупругая связь)», которая состоит из двух жестких стержней и двух упругих шаров. Вязкоупругий шарнир между стержнями и вязкоупругое столкновение между упругими шарами показаны на рисунке 4.
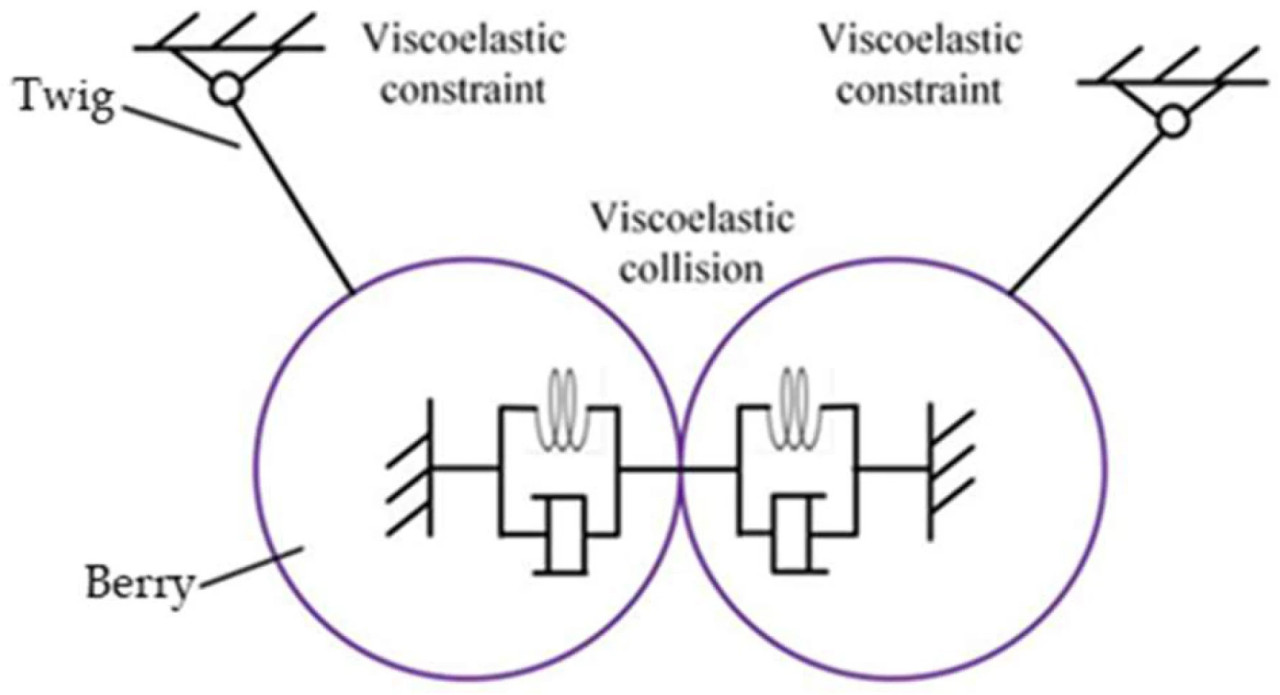
Рисунок 4. Модель вибрационно-ударного взаимодействия системы двойная плодоножка–ягода.
2.2.3. Предположения моделирования системы двойная плодоножка–ягода
Основные предположения в рамках модели вибрационно-ударного взаимодействия системы двойная плодоножка–ягода следующие:
(1) При фактическом возбуждении столкновения внутри виноградной грозди в основном происходят между ягодами, поэтому столкновения между ягодами и плодоножками игнорируются.
(2) Вращение плодоножки вокруг ее центральной линии игнорируется из-за ограничения вязкоупругого шарнира между плодоножками.
(3) Предполагается, что масса плодоножки и ягоды эквивалентна массе ягоды, пренебрегая массой и размером плодоножки.
(4) Для исследования столкновений между гладкой кожицей винограда трение игнорируется.
На основе этих предположений выводится модель вибрационно-ударного взаимодействия системы двойная плодоножка–ягода, как показано на рисунке 5. В этой модели (рисунок 4) существует вязкоупругое ограничение между фиксированным стержнем и плодоножкой, и вязкоупругое столкновение между упругими шарами. Однако, поскольку сама ягода проявляет вязкоупругие свойства, сложное соотношение между вязкоупругими ограничениями и столкновением необходимо упростить. Используя экспериментальные методы, эквивалентный коэффициент упругости на основе k1 и k2 может быть получен как k3, а эквивалентный вязкоупругий коэффициент на основе c1 и c2 может быть получен как c3. Аналогично, вязкоупругий коэффициент и коэффициент демпфирования для двух ягод, а также вязкоупругое столкновение могут быть эквивалентны k4 и c4. В результате, при вязкоупругом столкновении двух ягод модель «(вязкоупругий шарнир)–(жесткий стержень)–(упругий шар)–(вязкоупругая связь)» может быть упрощена и эквивалентна модели «(вязкоупругий шарнир)–(жесткий стержень)–(жесткий шар)–(вязкоупругая связь)».
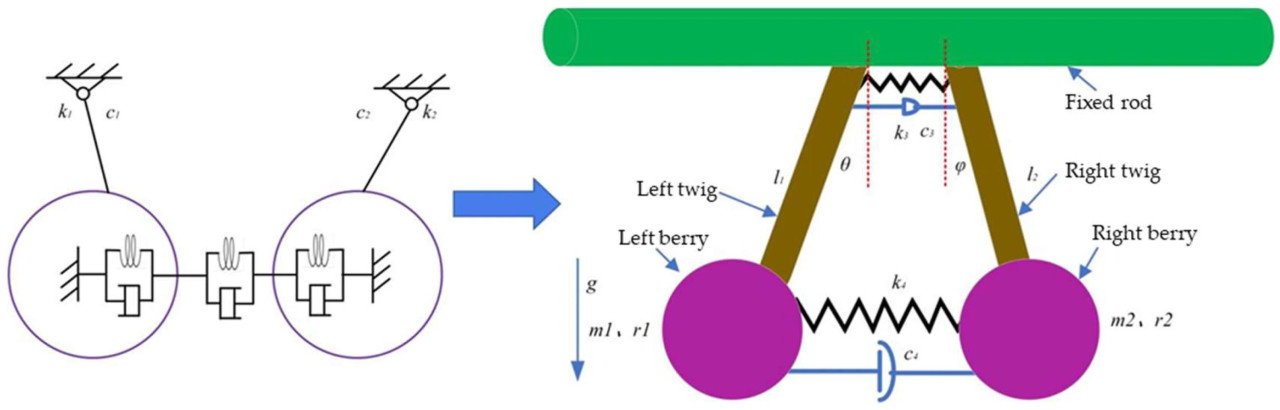
Рисунок 5. Модель динамических параметров системы двойная плодоножка–ягода, включая модель Кельвина системы двойная плодоножка–ягода и модель кинетических параметров. Примечание: θ — угол между левой плодоножкой и вертикальным направлением (°), φ — угол между правой плодоножкой и вертикальным направлением (°), k1 — коэффициент упругости соединения между левой плодоножкой и фиксированным стержнем, k2 — коэффициент упругости соединения между правой плодоножкой и фиксированным стержнем, l1 — длина левой плодоножки, l2 — длина правой плодоножки, r1 — радиус левой ягоды, r2 — радиус правой ягоды, m1 — масса левой ягоды, m2 — масса правой ягоды, и g — ускорение свободного падения.
2.2.4. Стадии движения модели вибрационно-ударного взаимодействия
Чтобы изучить закон падения ягоды и повреждения ягоды, крайне важно наблюдать модели движения во время вибрации грозди и столкновения. В этом контексте существуют два возможных отношения ягода–ягода и модели движения: одно отношение возникает, когда две соседние ягоды остаются в контакте, а другое включает изменяющееся взаимодействие между состояниями отсутствия контакта и контакта. Для первого отношения, когда ягоды остаются в контакте, наблюдается только режим вибрационно-ударного взаимодействия. Однако для последнего отношения движение состоит из комбинации как режима чистой вибрации, так и режима вибрационно-ударного взаимодействия.
В системе двойная плодоножка–ягода режим вибрации определяется как колебательное движение плодоножек под вязкоупругим ограничением между плодоножкой и фиксированным стержнем, как показано на рисунке 6a. Режим вибрационно-ударного взаимодействия, с другой стороны, является результатом связи между колебательным движением (из-за ограничения вязкоупругого шарнира) и столкновениями ягод (под вязкоупругим контактным ограничением), как показано на рисунке 6b.
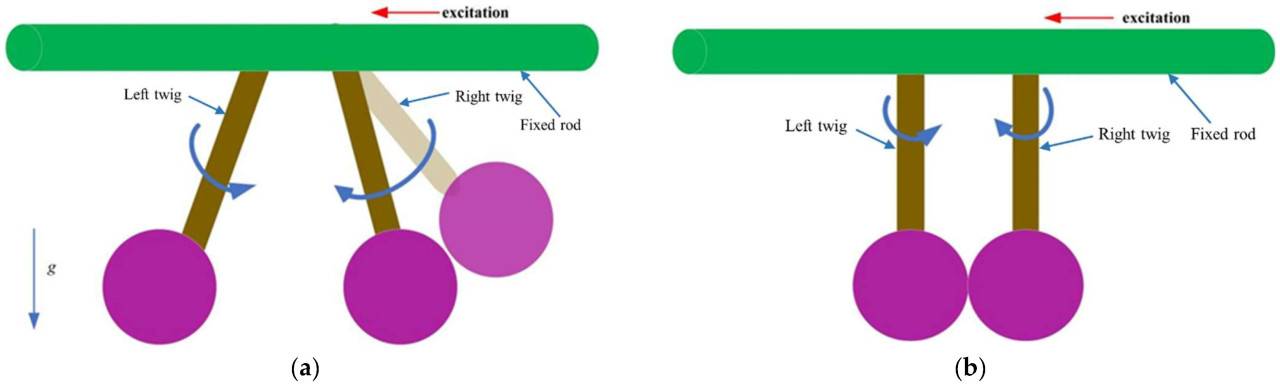
Рисунок 6. Модели движения модели вибрационно-ударного взаимодействия. (a) Режим вибрации и (b) режим вибрационно-ударного взаимодействия.
2.3. Динамическое уравнение режимов вибрации
Динамическая модель вибрационно-ударного взаимодействия системы двойная плодоножка–ягода, описанная в данной рукописи, была предложена на основе предположений, упомянутых в разделе 2.2.3. Теоретический вывод и анализ этой модели были проведены с учетом фактических условий винограда Кёхо.
Метод Лагранжа является отличным инструментом для решения движения многоконтурных ограниченных систем, и базовая функция Лагранжа имеет вид:

где T — функция кинетической энергии системы двойная плодоножка–ягода, а V — функция потенциальной энергии системы двойная плодоножка–ягода.
Базовое уравнение Лагранжа идеальной и полной системы имеет вид:

где q — обобщенные координаты, включая θ и φ, и 𝑄 — обобщенная внешняя сила.
Кинетическая энергия, генерируемая скоростью ягод в режиме вибрации, может быть выражена следующим образом:

где m1 и l1 — масса и длина левой ягоды, m2 и l2 — масса и длина правой ягоды, а θ и φ — обобщенные координаты (рисунок 5).
В отличие от традиционного метода Лагранжа, полностью учитывается особенность вибрации, вызванная вязкоупругим шарниром между двумя плодоножками, причем упругость вязкоупругости интегрируется в потенциальную энергию V. В результате, потенциальная энергия, генерируемая вязкоупругим действием плодоножек и силой тяжести ягод, следующая:

где g — ускорение свободного падения, d0 — расстояние между двумя точками шарнира, а k3 — эквивалентный коэффициент упругости связи k1 и k2.
Традиционный метод Лагранжа не учитывает применение демпфирования к базовому уравнению Лагранжа. Данная рукопись, следовательно, вводит метод интегрирования вязкоупругого демпфирования плодоножек в теоретическую структуру уравнения Лагранжа путем введения диссипативной функции D. В результате получается диссипативная функция системы:

где c3 — эквивалентный коэффициент демпфирования столкновения связи c1 и c2.
Учитывая упругость и демпфирование вязкоупругого действия плодоножек, уравнение Лагранжа может быть окончательно получено следующим образом:

Снова в отличие от традиционного метода, вязкоупругая вибрация основана на уравнении Лагранжа. В результате, подставляя уравнения (1)–(5) в уравнение (6) и упрощая расчетное решение, можно окончательно получить динамические дифференциальные уравнения для режима вибрации:

2.4. Динамическое уравнение режима вибрационно-ударного взаимодействия
Ударная сила является внешней силой в системе двойная плодоножка–ягода. Когда происходит столкновение, система двойная плодоножка–ягода будет подвержена силе внезапного изменения, которая изменит режим вибрации. Как интегрировать факторы столкновения, следовательно, является ключом к установлению динамического уравнения вибрационно-ударного взаимодействия.
2.4.1. Проверка столкновения
В режиме вибрационно-ударного взаимодействия столкновение ягод значительно увеличит шансы падения ягоды и повреждения ягоды. Таким образом, важно определить, сталкиваются ли ягоды. Когда ягоды A и B движутся относительно друг друга, если происходит столкновение, будет контакт в точках M и N; если нет, точки контакта не будет, как показано на рисунке 7.
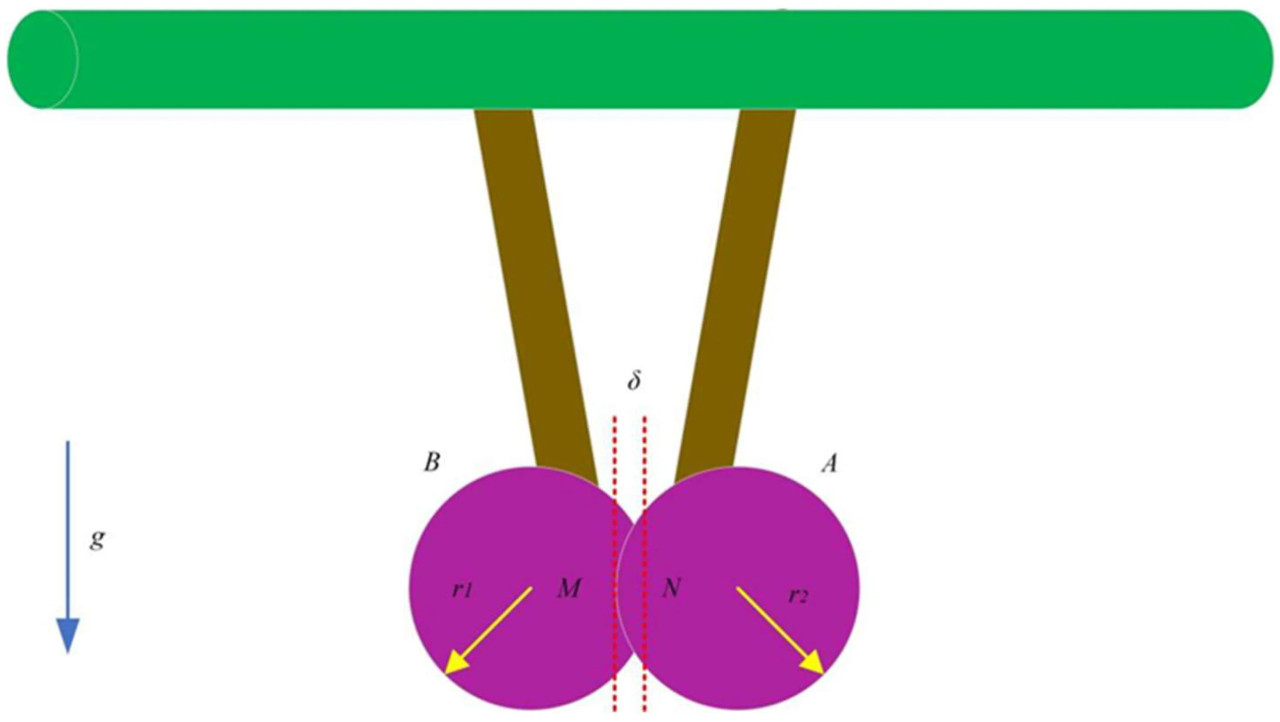
Рисунок 7. Проверка столкновения.
Если ягоды сферические, глубина взаимного проникновения в точке контакта может быть получена через геометрические соотношения между двумя ягодами, что может быть показано следующим образом:

где δ — величина деформации вдоль радиуса ягод, которые будут сжимать друг друга и вызывать деформацию после контакта, а 𝑟1 и 𝑟2 — радиус левой ягоды и правой ягоды соответственно.
Чтобы обнаружить, происходит ли столкновение в точке столкновения или нет, критерий столкновения следующий:

2.4.2. Выражение столкновения
После подтверждения того, что ягоды сталкиваются, необходимо вычислить контактную силу. Согласно контактной теории Герца, поскольку влияние поверхностного трения ягод игнорируется, значение контактной силы в момент времени, следовательно, равно значению ударной силы. Из-за вязкоупругости между ягодами значение ударной силы между двумя ягодами A и B в модели вибрационно-ударного взаимодействия вычисляется с использованием модели Кельвина, как показано на рисунке 7.
Ударная сила может быть вычислена в соответствии с базовой моделью Кельвина. Базовое уравнение Кельвина имеет вид:

где k4 — эквивалентный коэффициент упругости между двумя ягодами, а c4 — эквивалентный коэффициент демпфирования столкновения между двумя ягодами.
Обобщенная ударная сила 𝑄𝑛 является одним из видов обобщенной силы 𝑄. Ударная сила может быть введена в структуру Лагранжа как обобщенная внешняя сила, и согласно принципу Лагранжа ударная сила, действующая на точку контакта ягод, может быть преобразована в обобщенную ударную силу следующим образом:

где 𝑄𝑛 — обобщенная ударная сила.
В результате, переместим обобщенную ударную силу из обобщенной силы в левую часть уравнения (7). В системе двойная плодоножка–ягода обобщенная сила в основном включает обобщенную ударную силу и обобщенную силу, исключая обобщенную ударную силу из-за вязкоупругого столкновения ягод:

где 𝑄𝑗 — обобщенная сила без обобщенной ударной силы.
2.4.3. Динамическое уравнение режимов вибрационно-ударного взаимодействия
В данном исследовании, путем введения ударной силы в динамическое уравнение вибрации как внешней силы системы двойная плодоножка–ягода, реализовано динамическое моделирование вибрационно-ударного взаимодействия на основе метода Лагранжа. Уравнение вибрационно-ударного взаимодействия может быть получено путем подстановки общей ударной силы в обобщенную внешнюю силу 𝑄 через принцип Лагранжа. Из уравнений (7), (10) и (11) динамические дифференциальные уравнения могут быть получены путем упрощения расчетного решения динамического уравнения следующим образом:

Путем подстановки уравнений (10)–(12) в уравнение (13) и упрощения расчетного решения, в структуру уравнения Лагранжа вводятся выражения для вязкоупругих вибраций двух плодоножек, вязкоупругого столкновения двух ягод и обобщенной ударной силы. Наконец, получено динамическое уравнение, представляющее режим вибрационно-ударного взаимодействия системы двойная плодоножка–ягода:

2.5. Вычисление модели
2.5.1. Вычислительная платформа
На основе динамического уравнения модели вибрационно-ударного взаимодействия была установлена программа симуляции. Для симуляции использовалось экспериментальное оборудование — рабочая станция Dell-T7920, а операционная система — Windows 10. Аппаратная конфигурация рабочей станции включала два процессора Intel Xeon Gold 6248R, 64 ГБ оперативной памяти и две видеокарты NVIDIA Quadro RTX 5000. Версия Matlab, использованная для симуляции, — 2016a.
2.5.2. Вычисление
Уравнения (7) и (14) оба указывают на то, что динамические уравнения модели вибрационно-ударного взаимодействия системы двойная плодоножка–ягода состоят из типичных нелинейных дифференциально-алгебраических уравнений с постоянными коэффициентами. В данном исследовании метод Рунге–Кутты применялся для решения динамического уравнения следующим образом:
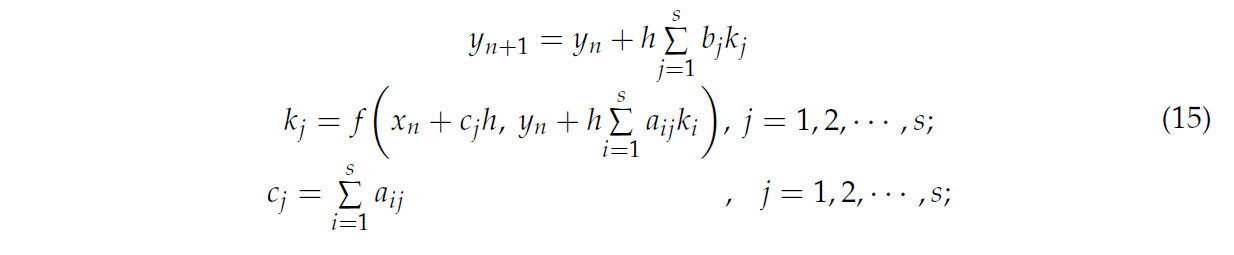
Из уравнения (15) более широко используемая стандартная формула Рунге–Кутты четвертого порядка может быть упрощена следующим образом [41]:
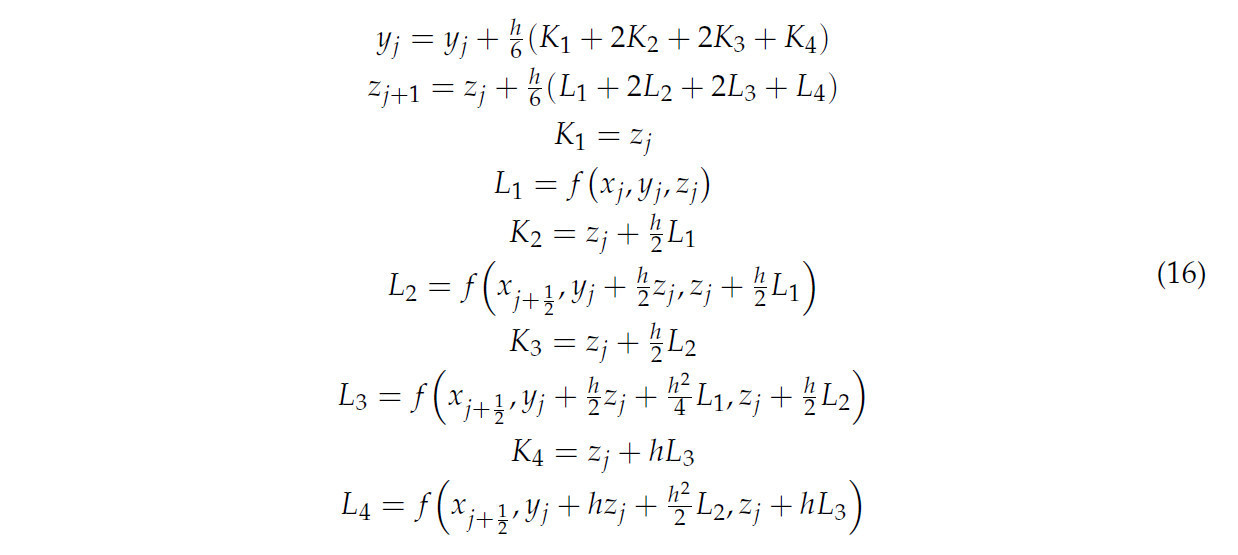
Метод Рунге–Кутты четвертого порядка, полученный из уравнения (15), может использоваться для решения дифференциальных уравнений режимов вибрации и вибрационно-ударного взаимодействия, но уравнение (16) широко используется в основном алгоритме данного исследования. Основной принцип метода Рунге–Кутты заключается в применении ряда Тейлора с конечным числом членов для аппроксимации функции решения, и источником ошибки является член усечения Тейлора, где ошибка относится к ошибке усечения. Ряд Тейлора используется для вычисления приблизительного значения переменной стадии на конце каждого шага интегрирования, и значение ряда Тейлора используется для вычитания. Ошибка, полученная с помощью шагов выше, затем применяется в качестве критерия для вычисления ошибки. Если оценка ошибки больше начального установленного значения системы, то длина шага интегрирования уменьшается, и оценка ошибки пересчитывается. Если ошибка намного меньше начального установленного значения системы, то длина шага интегрирования увеличивается. В результате нелинейные уравнения могут быть решены.
2.5.3. Метод симуляции
Традиционные методы расчета режима вибрации обычно сосредотачиваются только на режиме вибрации, пренебрегая режимом вибрационно-ударного взаимодействия, поскольку сочетание вибраций и столкновений усложняет процесс расчета. Следовательно, существует несколько исследований методов расчета режима вибрационно-ударного взаимодействия. Данное исследование, таким образом, предлагает новый метод расчета как для режима чистой вибрации, так и для режима вибрационно-ударного взаимодействия в плоской системе координат с использованием Matlab2016a.
Ключевой принцип этого метода заключается в том, что режим вибрации и режим вибрационно-ударного взаимодействия рассматриваются как два различных, но взаимосвязанных режима движения. Эти режимы плавно объединяются путем отслеживания расстояния между ягодами и определения времени симуляции T. На каждом этапе, учитывая координаты системы (𝜃,𝜑,𝜃˙,𝜑˙), установите T = 0. Согласно уравнению (7), режим вибрации может быть решен, и расстояние между ягодами может быть вычислено. Если расстояние меньше нуля, это указывает на столкновение, и режим вибрационно-ударного взаимодействия был запущен. В таких случаях величина ударной силы вычисляется с использованием уравнения (10), и стадия после столкновения (𝜃0,𝜑0,𝜃˙0,𝜑˙0) определяется с использованием уравнения (13). Эта новая стадия сбрасывается как начальное условие T = 0, и процесс повторяется для получения всех стадий модели вибрационно-ударного взаимодействия на основе Matlab2016a.
2.5.4. Параметры симуляции и процесс
В данном исследовании соответствующие параметры каждого компонента были получены из [32]. Процесс решения динамического уравнения вибрационно-ударного взаимодействия показан на рисунке 8, и конкретные шаги решения следующие:
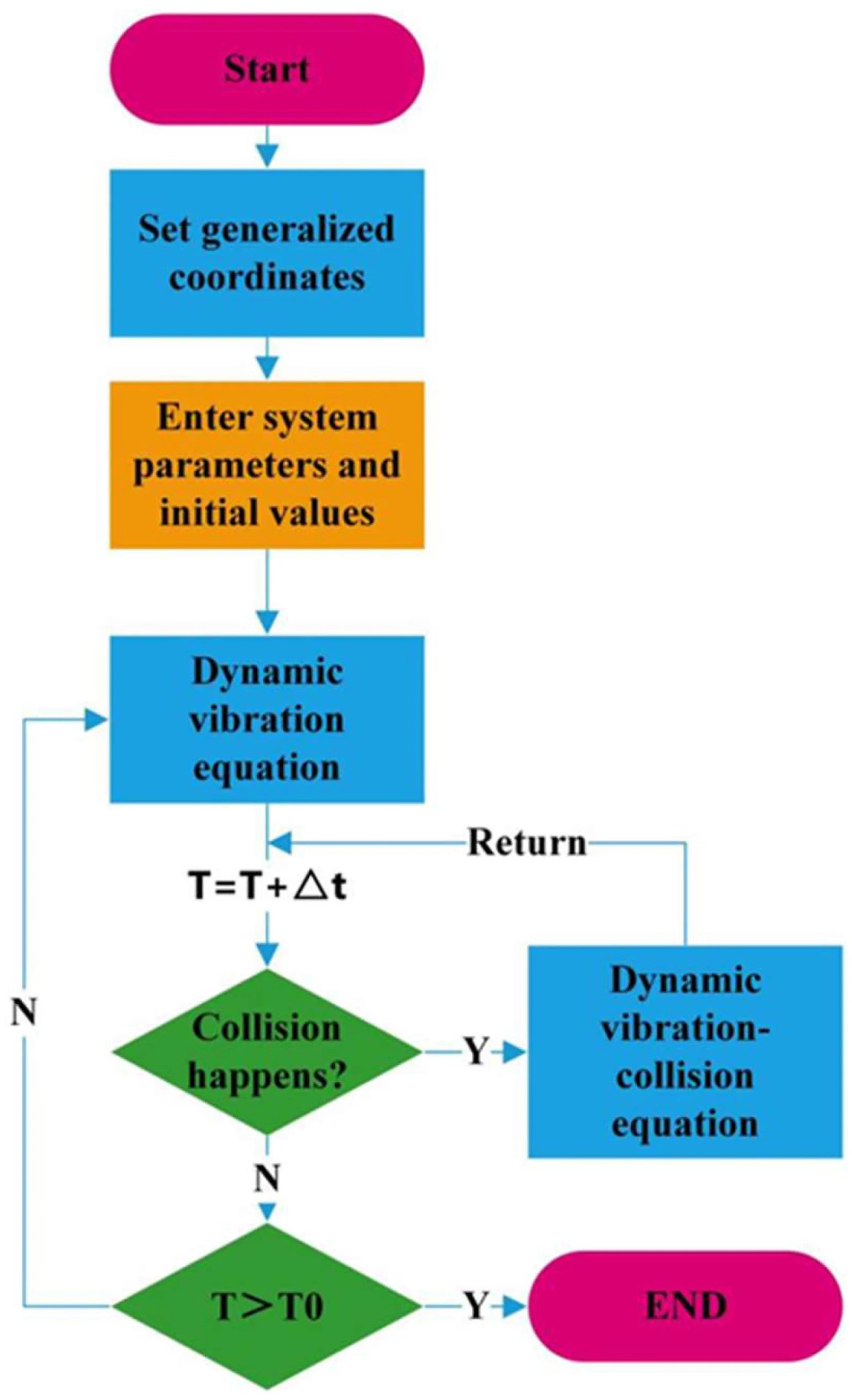
Рисунок 8. Блок-схема решения динамического уравнения.
(1) Установите обобщенные координаты (𝜃,𝜑). Проанализируйте динамическую модель и примените метод Лагранжа для получения уравнения динамики вязкоупругой вибрации и уравнения динамики вибрационно-ударного взаимодействия на основе обобщенных координат (𝜃,𝜑).
(2) Введите параметры системы и начальные значения. Параметры системы в основном включают радиус и массу ягод, коэффициенты вязкоупругого ограничения k3 и c3 между двумя плодоножками, и коэффициенты вязкоупругого столкновения k4 и c4 между двумя ягодами. Начальное значение было (𝜃,𝜑,𝜃˙,𝜑˙), что соответствует времени T = 0 на первом шаге симуляции.
(3) Решите положение обобщенной координаты и скорость в следующий момент. Функция ode23 на основе метода Рунге–Кутты применялась для решения уравнения динамики вибрации.
(4) Определение столкновения. Согласно уравнению (7), определите обобщенные координаты (𝜃,𝜑,𝜃˙,𝜑˙) на каждом временном шаге в симуляции и вычислите расстояние между центрами двух ягод на каждом шаге. Используя уравнение (8), если расстояние меньше суммы радиусов ягод, то вычислите обобщенную координату каждого шага режима вибрационно-ударного взаимодействия системы двойная плодоножка–ягода. Затем вернитесь к шагу (3) снова, чтобы решить уравнение динамики вибрационно-ударного взаимодействия на основе функции ode23 метода Рунге–Кутты. Если оно больше суммы радиусов, перейдите к шагу (5).
(5) Определение времени симуляции. На этом шаге определите, достигло ли время T(n = I) на одном временном шаге начального установленного конечного времени T0 или нет. Если конечное время не достигнуто, вернитесь к шагу (3). Если начальное установленное время достигнуто, вывод достигнут. Затем сохраните обобщенные координаты (𝜃0,𝜑0,𝜃˙0,𝜑˙0) в каждый момент. Это завершает весь процесс решения динамического уравнения [42].
2.6. Проект симуляции
Чтобы изучить динамические характеристики модели вибрационно-ударного взаимодействия для системы двойная плодоножка–ягода, была установлена динамическая модель вибрационно-ударного взаимодействия с использованием Matlab2016a и численно решена. Были разработаны четыре типа симуляционных экспериментов, как следует:
(1) Симуляция траектории движения. Чтобы проанализировать траекторию движения, был разработан тест вибрации одной ягоды и одной плодоножки при вязкоупругом ограничении без столкновения и тест вибрационно-ударного взаимодействия системы двойная плодоножка–ягода. Количество шагов для всего решения было установлено на 350, и начальный угол правых плодоножек был установлен на 45° в тесте вибрации (тест 1), в то время как в тесте вибрационно-ударного взаимодействия (тест 2) количество шагов было установлено на 350, и начальный угол двух плодоножек был установлен на −45° и 45° соответственно. Всего 350 шагов было определено для обеспечения сходимости в разумное время на основе множественных симуляций. Сравнивая экспериментальные и симуляционные результаты (с начальными углами 30°, 45°, 60° и 75° между плодом и вертикальным направлением), наименьшая ошибка произошла, когда начальный угол был 45°, и этот угол был, таким образом, выбран в качестве начального угла для последующих симуляций. Гравитационная потенциальная энергия была установлена в качестве внешнего возбуждения в системе двойная плодоножка–ягода.
(2) Симуляция симметричного режима вибрационно-ударного взаимодействия. Чтобы исследовать закон кинематических и динамических характеристик системы двойная плодоножка–ягода, были разработаны два теста, и количество шагов для всего решения было установлено на 350. В тесте 3 угол правых плодоножек был установлен на 45° в системе двойная плодоножка–ягода. Параметры двух ягод и двух плодоножек были одинаковыми. В результате тест 3 был полностью симметричным на начальной стадии. Напротив, тест 4 был контрольным экспериментом, и начальные условия были такими же, как в тесте 3, но не было взаимодействия между двумя ягодами. Гравитационная потенциальная энергия была установлена в качестве внешнего возбуждения для теста 3 и теста 4.
(3) Симуляция для эффекта вязкоупругости на режим вибрационно-ударного взаимодействия. Чтобы изучить влияние вязкоупругости шарниров на режим вибрационно-ударного взаимодействия, были разработаны тест 5 и тест 6. В тесте 5 количество шагов для всего решения было установлено на 350, и начальный угол правых плодоножек был установлен на 45° в системе двойная плодоножка–ягода. Параметры двух ягод и двух плодоножек были одинаковыми. Напротив, тест 6 был контрольным экспериментом, и начальные условия были такими же, как в тесте 5, но не было вязкоупругости в шарнирах. Чтобы проанализировать влияние вязкоупругости ягод на режим вибрационно-ударного взаимодействия, были разработаны тесты 7 и 8. В тесте 7 количество шагов для всего решения было установлено на 350, и начальный угол правых плодоножек был установлен на 45° в системе двойная плодоножка–ягода. Параметры двух ягод и двух плодоножек были одинаковыми. Напротив, тест 8 был контрольным экспериментом, и начальные условия были такими же, как в тесте 7, но не было вязкоупругости ягод. Гравитационная потенциальная энергия была установлена в качестве внешнего возбуждения для тестов 5, 6, 7 и 8.
(4) Симуляция несимметричного режима вибрационно-ударного взаимодействия. Чтобы проанализировать влияние начального угла ягод на режим вибрационно-ударного взаимодействия, был разработан тест 9. В тесте 9 количество шагов для всего решения было установлено на 350, и начальный угол левых плодоножек был установлен на −45° в системе двойная плодоножка–ягода. Параметры двух ягод и двух плодоножек были одинаковыми, но начальный угол правой плодоножки был 15°, 30°, 45°, 60° и 75° соответственно в пяти экспериментах теста 9. Гравитационная потенциальная энергия была установлена в качестве внешнего возбуждения для теста 9.
3. Результаты и обсуждение
3.1. Симуляция траектории движения
Результаты симуляции теста 1 и теста 2 показаны на рисунке 9a,b. На рисунке 10 синие, желтые и зеленые круги все представляют ягоды в движении. Как показано на рисунке 9a, начальная стадия правой ягоды — a1, и она выполняет режим вибрации под внешним возбуждением. Траектория движения режима вибрации правой ягоды может быть выражена как a1→a2→a3→a4→a5. На основе предыдущего исследования [32], рисунок 10 показывает, что траектория движения ягоды, обведенной синим, — a1→a2→a3→a4→a5→a6→a7→a8, что соответствует траектории движения ягоды на рисунке 9a. В результате можно заключить, что плод, обведенный синим, проявляет режим вибрации.
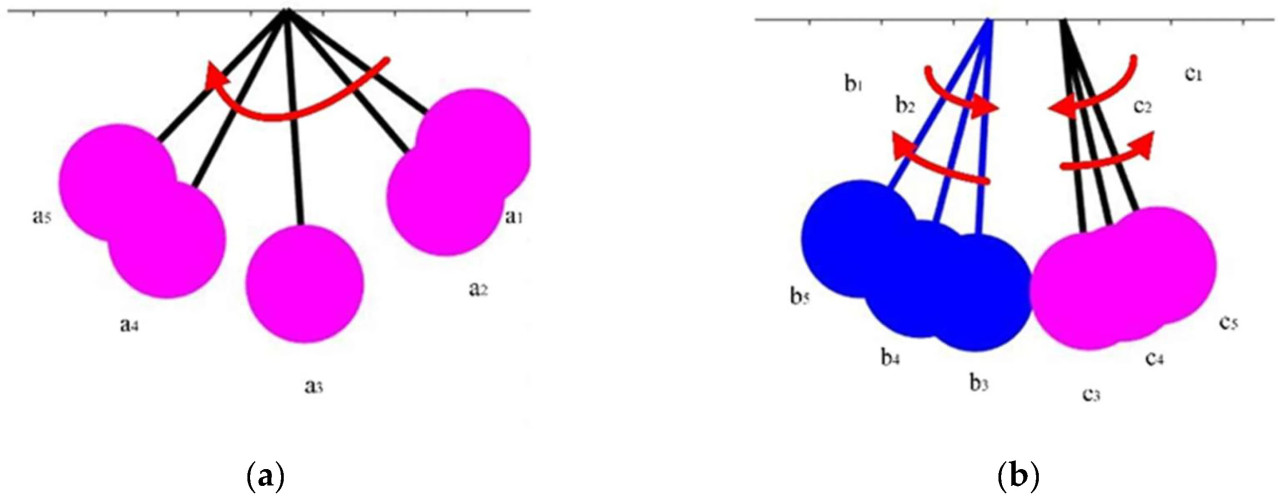
Рисунок 9. Результаты симуляции теста 1 и теста 2. (a) Режим чистой вибрации и (b) режим вибрационно-ударного взаимодействия.
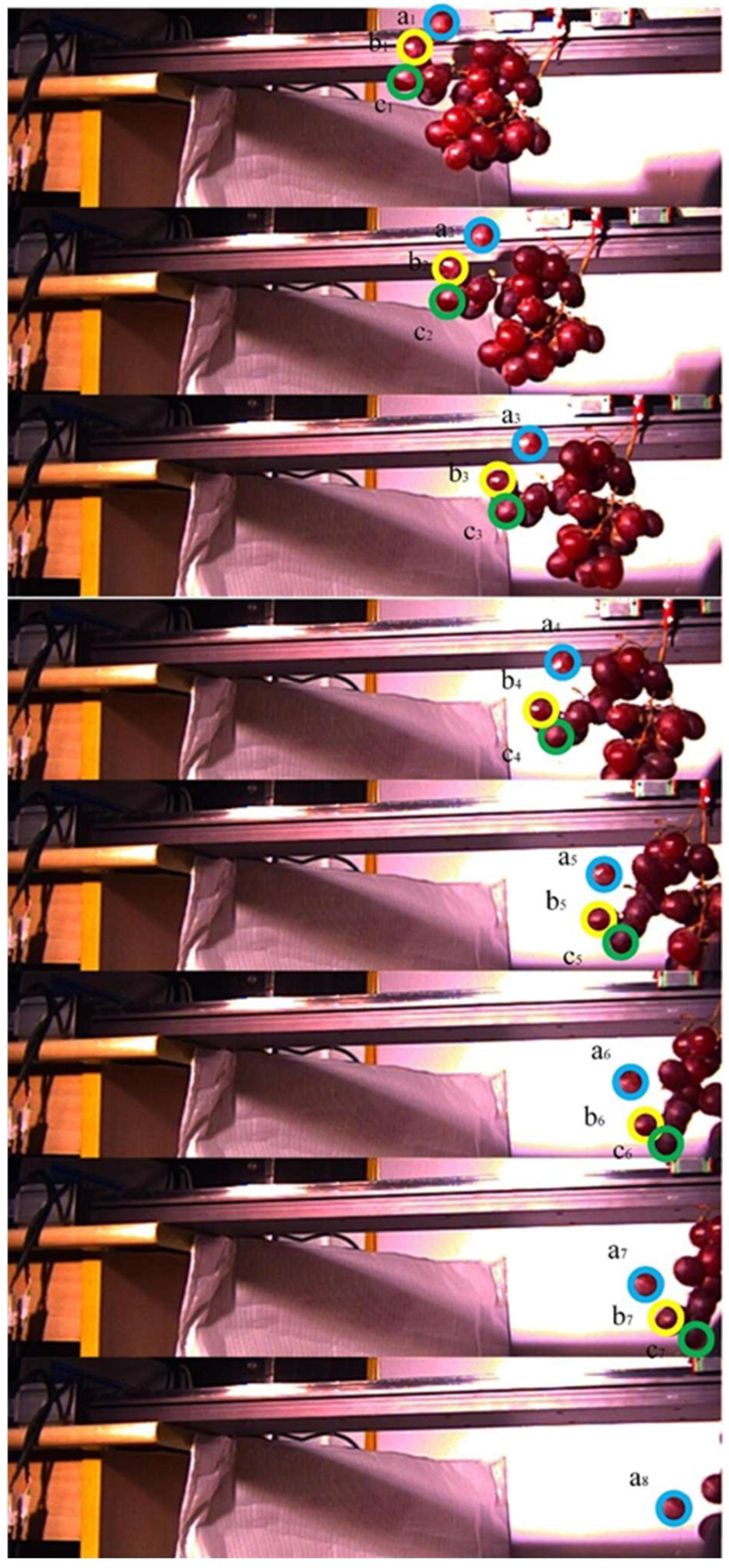
Рисунок 10. Экспериментальные результаты, полученные с использованием высокоскоростной камеры [32].
На рисунке 9b начальная стадия ягоды — c1, и она выполняет режим вибрации под внешними возбуждениями, когда траектория движения — c1→c2→c3, и когда правая ягода достигает критической позиции в c3, ягоды сталкиваются и проявляют режим вибрационно-ударного взаимодействия. За короткое время траектория движения — c3→c4→c5. Напротив, на основе нашего предыдущего исследования [32], рисунок 10 показывает, что траектория движения ягоды, обведенной зеленым, — c1→c2→c3→c4→c5→c6→c7, что соответствует траектории движения правой ягоды из-за столкновения с ягодой, обведенной желтым. Такое же поведение наблюдается в симуляции и эксперименте: ягода вибрирует из-за внешнего возбуждения сначала, и когда ягода сталкивается с другими ягодами, возникает режим вибрационно-ударного взаимодействия. В результате можно заключить, что плод, обведенный зеленым, проявляет режим вибрационно-ударного взаимодействия. Эти результаты указывают, что движение может быть эффективно описано с помощью модели вибрационно-ударного взаимодействия системы двойная плодоножка–ягода.
3.2. Симуляция симметричного режима вибрационно-ударного взаимодействия
3.2.1. Результат
(1) Угол
Один из результатов симуляции тестов 3 и 4 показан на рисунке 11. В тесте 4 максимальный угол вибрации демонстрирует периодическое затухание. Рисунок 12 представляет экспериментальные результаты от Faheem и др. [2], которые наблюдали линейную зависимость между силой подвешивания и углом качания, причем сила подвешивания демонстрировала периодическое затухание в режиме чистой вибрации. Результат теста 4 согласуется с выводами Faheem и др. [2]. Напротив, в тесте 3 максимальный угол вибрации также показывает периодическое затухание, но период вибрации короче по сравнению с тестом 4. В обоих тестах угол в конечном итоге стабилизируется на фиксированном значении по мере движения модели. Общая характеристика в обоих случаях заключается в том, что кривые изменения угла для левой и правой ягод идентичны, по крайней мере, при рассмотрении значений угла, показанных на рисунке 11.
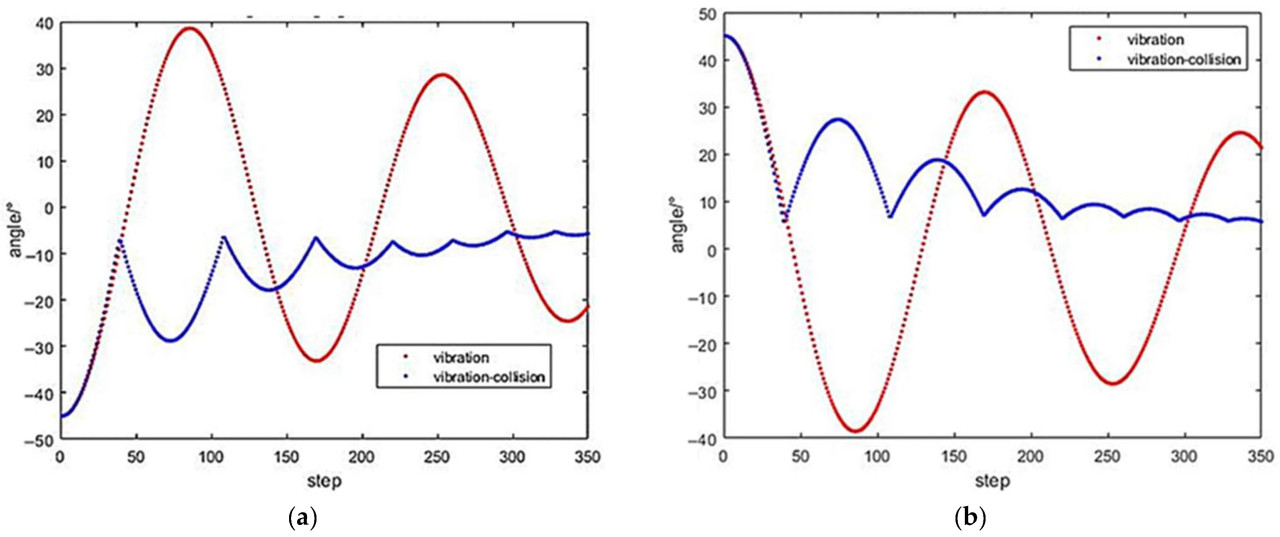
Рисунок 11. Сравнение между симуляцией и экспериментом. (a) Изменение угла для левой ягоды и (b) изменение угла для правой ягоды.
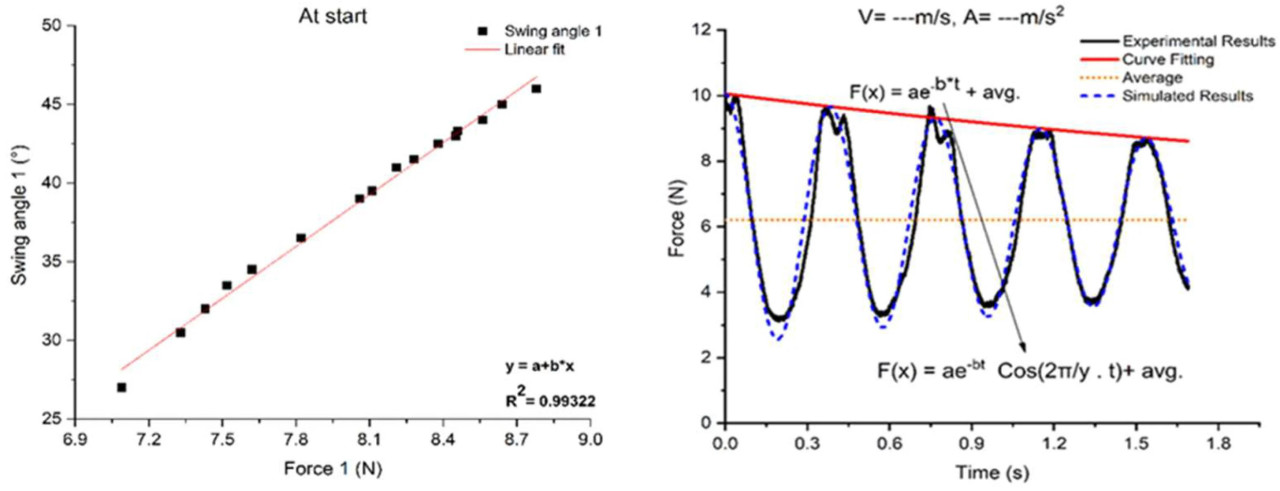
Рисунок 12. Воспроизведено из Faheem, M.; Liu, J.; Chang, G.; Ahmad, I.; Peng, Y. Hanging force analysis for realizing low vibration of grape clusters during speedy robotic post-harvest handling. Int. J. Agric. Biol. Eng. 2021, 14, 62–71 [2], с разрешения Международной ассоциации сельскохозяйственной инженерии (IAgrE), 2021.
(2) Кинетическая энергия
Один из результатов симуляции тестов 3 и 4 показан на рисунке 13. Как видно на рисунке 13, кинетическая энергия ягоды в тесте 4 колеблется периодически, причем максимальная кинетическая энергия в каждом цикле постепенно уменьшается линейно, пока вся энергия в конечном итоге не рассеивается. Напротив, в тесте 3 кинетическая энергия также следует периодическому затухающему паттерну. Однако после столкновения кинетическая энергия испытывает резкое уменьшение. Период вибрации в тесте 3 короче, чем в тесте 4, и в обоих случаях кинетическая энергия в конечном итоге стабилизируется до фиксированного значения по мере прогресса модели. Общая черта обоих тестов заключается в том, что кривые изменения кинетической энергии для левой и правой ягод идентичны.
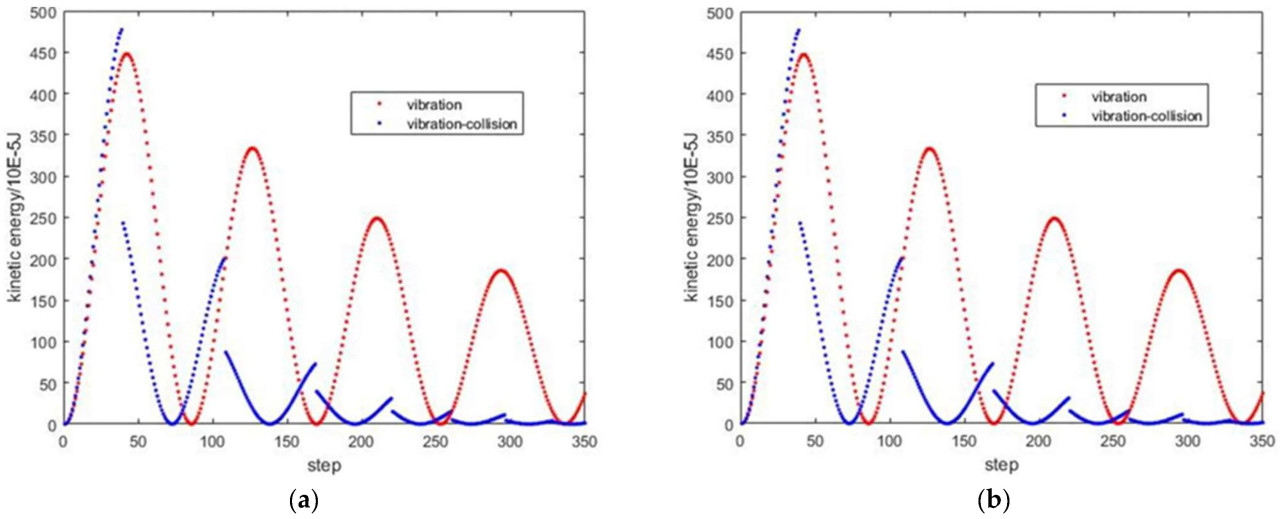
Рисунок 13. Изменение кинетической энергии (a) для левой и (b) для правой ягод.
(3) Потенциальная энергия
Один из результатов симуляции тестов 3 и 4 показан на рисунке 14, показывая, что потенциальная энергия ягоды в тесте 4 изменяется периодически, причем минимальное значение потенциальной энергии в каждом цикле следует линейному тренду. Напротив, потенциальная энергия в модели вибрационно-ударного взаимодействия показывает периодическое затухание. Период вибрации в тесте 3 короче, чем в тесте 4, но в обоих случаях потенциальная энергия в конечном итоге стабилизируется на фиксированном значении по мере прогресса модели. Общая черта обоих тестов заключается в том, что кривые изменения потенциальной энергии для левой и правой ягод идентичны.
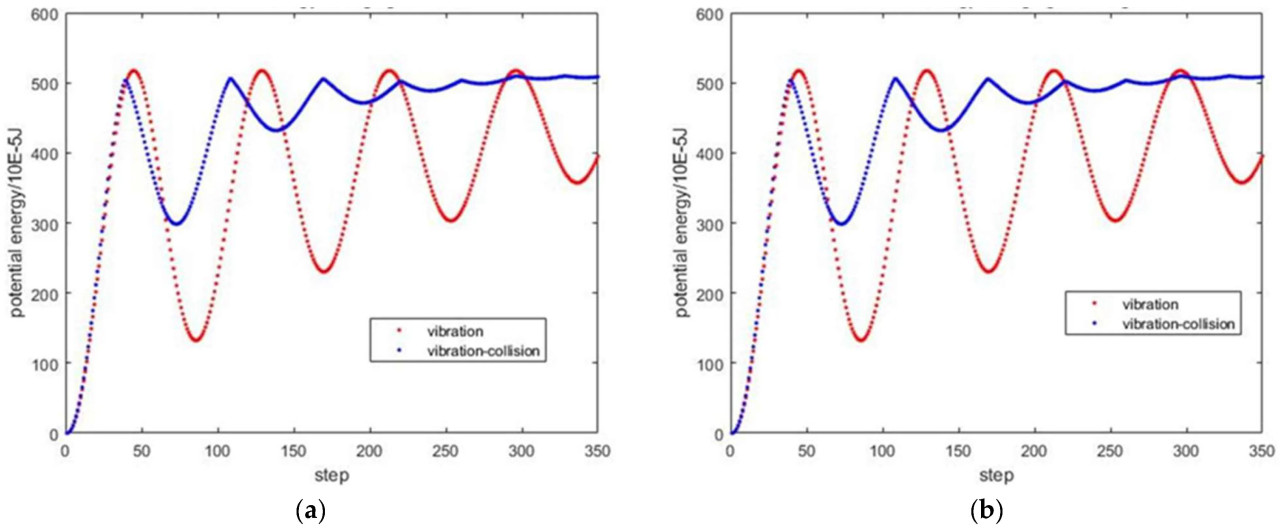
Рисунок 14. Изменение потенциальной энергии (a) для левой и (b) для правой ягод.
3.2.2. Анализ
(1) Наблюдая рисунок 11, рисунок 13 и рисунок 14, из-за столкновений ягод в системе двойная плодоножка–ягода, амплитуда вибрации ягоды уменьшена, частота столкновений увеличивается, и потеря механической энергии также возрастает. Следовательно, кинетическая энергия уменьшается до нуля, в то время как угол отклонения и потенциальная энергия уменьшаются периодически, пока не достигнут фиксированного значения. Внезапное падение кинетической энергии во время цикла вибрации-столкновения в основном связано с обменом между кинетической энергией и внутренней энергией во время столкновений, где часть кинетической энергии преобразуется во внутреннюю энергию. В конечном счете, угол отклонения и потенциальная энергия стабилизируются из-за непрерывной потери механической энергии.
(2) Во время процесса вибрационно-ударного взаимодействия часть механической энергии преобразуется во внутреннюю энергию, что приводит к уменьшению амплитуды вибрации ягоды. В контексте сбора столового винограда и послеуборочного обращения отрыв ягоды в основном вызван перегрузкой или усталостью плодоножки. Уменьшение амплитуды вибрации уменьшит отрыв ягоды, вызванный чрезмерной мгновенной нагрузкой, тогда как увеличенная частота столкновений может увеличить потерю плода из-за усталости. Чтобы решить проблему падения ягоды в процессе вибрационно-ударного взаимодействия, необходимо дальнейшее исследование комплексной динамики падения ягоды, вызванного этим паттерном.
(3) Преобразование механической энергии во внутреннюю энергию во время вибрационно-ударного взаимодействия может вызывать различный степени повреждения ягод, что может негативно повлиять на товарное качество и срок хранения плода. Основными причинами повреждения ягод являются чрезмерная ударная сила и накопленное усталостное повреждение. В производстве столового винограда ударные силы редко достигают порога, который вызвал бы немедленное повреждение ягоды, но усталостное повреждение из-за повторяющихся столкновений встречается чаще. Будущие исследования должны, следовательно, сосредоточиться на минимизации усталостного повреждения, вызванного столкновениями, для улучшения обращения с ягодами и результатов хранения.
3.3. Симуляция различного эффекта на режим вибрационно-ударного взаимодействия
3.3.1. Влияние вязкоупругости
Результаты симуляции теста 5 и теста 6 показаны на рисунке 15. Можно наблюдать, что угол ягоды постепенно уменьшается со временем из-за обмена между механической энергией и внутренней энергией. Дополнительно, в тесте 5 происходит заметная задержка перед столкновением, и диапазон вибрации плодоножки сужается. Эти результаты предполагают, что часть механической энергии преобразуется в потенциальную энергию ягод, в то время как другая часть преобразуется во внутреннюю энергию плодоножек. Следовательно, вязкоупругая вибрация плодоножек влияет на общее вибрационное поведение модели.
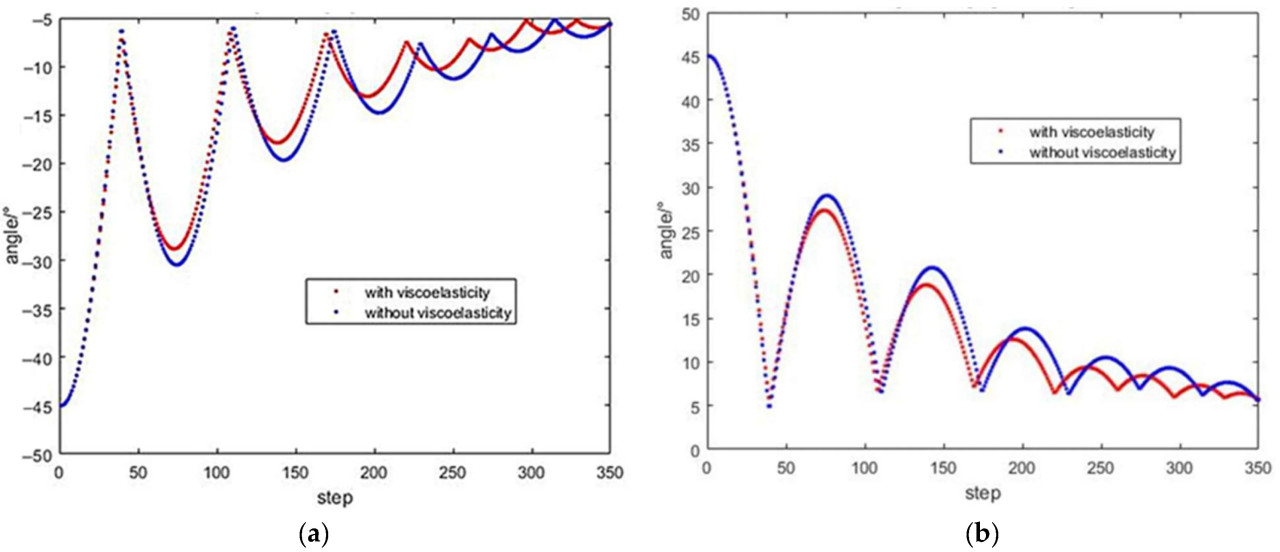
Рисунок 15. Диаграмма, показывающая изменение угла с вязкоупругостью и без вязкоупругости плодоножек. (a) Изменение угла для левой ягоды и (b) изменение угла для правой ягоды.
Результаты симуляции тестов 7 и 8 показаны на рисунке 16. Можно наблюдать, что угол ягоды постепенно уменьшается со временем из-за обмена между механической энергией и внутренней энергией. Дополнительно, в тесте 8 происходит задержка перед столкновением, поскольку амплитуда вибрации больше по сравнению с тестом 7. Далее, в тесте 7 диапазон вибрации плодоножки уменьшен, потому что часть кинетической энергии преобразуется во внутреннюю энергию. Это указывает, что вязкоупругое столкновение ягод влияет на общее вибрационное поведение модели.
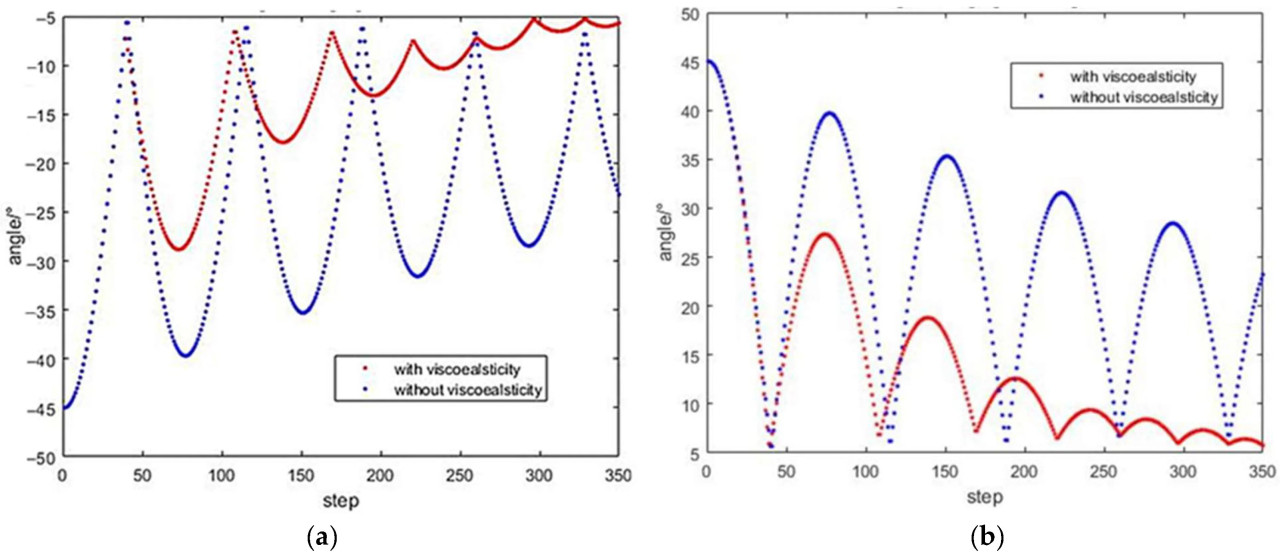
Рисунок 16. Диаграмма, показывающая изменение угла с вязкоупругостью и без вязкоупругости для (a) левой и (b) правой ягод.
3.3.2. Влияние несимметричного угла
Результаты симуляции теста 9 показаны на рисунке 17. Можно наблюдать, что хотя начальные отклонения различаются, кривые изменения угла с шагов от 0 до 200 схожи. В диапазоне от шагов 200 до 350 нет четкого паттерна в кривых изменения угла из-за взаимодействия между кинетической и потенциальной энергией. Однако потеря механической энергии в конечном счете вызывает стабилизацию отклонения ягоды на фиксированном значении. Дополнительно, как наблюдается для правой ягоды, чем больше начальное отклонение, тем меньше максимальное отклонение в первом цикле вибрации-столкновения. Напротив, большее начальное отклонение приводит к большему максимальному углу во втором цикле вибрации-столкновения.
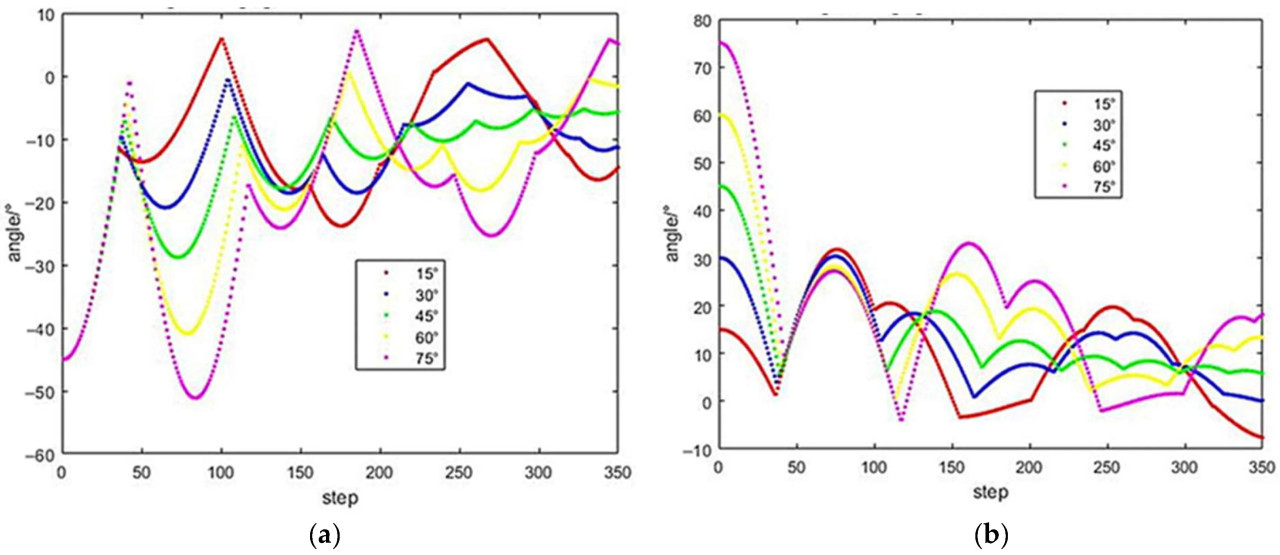
Рисунок 17. Диаграмма, показывающая изменение угла с использованием различных начальных углов для (a) левой и (b) правой ягод.
4. Выводы
В данном исследовании вибрации грозди и динамика столкновений в предложенной системе двойная плодоножка–ягода были исследованы через моделирование, динамическое выражение и численное вычисление поведения вибрационно-ударного взаимодействия. Основные выводы и заключения суммированы следующим образом:
(1) Была предложена модель вибрационно-ударного взаимодействия для системы двойная плодоножка–ягода на основе вибрационной модели «(гибкий стержень)–(вязкоупругий шарнир)–(жесткий стержень)–(жесткий шар)». Новая модель, названная «(вязкоупругий шарнир)–(жесткий стержень)–(жесткий шар)–(вязкоупругая связь)», успешно описывает связь вибраций и столкновений в системе двойная плодоножка–ягода.
(2) Динамическое уравнение вибрационно-ударного взаимодействия было выведено путем интегрирования выражений для вязкоупругих вибраций плодоножек, вязкоупругих столкновений между ягодами и обобщенных ударных сил в структуру уравнения Лагранжа. Был разработан новый вычислительный метод для определения режима вибрационно-ударного взаимодействия в системе двойная плодоножка–ягода.
(3) Симуляции продемонстрировали, что режим вибрационно-ударного взаимодействия приводит к более коротким периодам вибрации и меньшим амплитудам по сравнению с режимами чистой вибрации. На основе этих результатов были проанализированы эффекты вибрационно-ударного взаимодействия на отрыв ягоды и повреждение ягоды. Эти результаты предоставляют ключевой теоретический фундамент для изучения механизмов отрыва и повреждения ягод.
В режиме вибрационно-ударного взаимодействия период вибрации плода короткий, и амплитуда мала. Это явление указывает на то, что система быстро рассеивает энергию после столкновений, вызывая достижение плодом стабильного состояния за короткий период времени. При проектировании машин для уборки винограда, следовательно, следует уделять особое внимание ударной силе между плодами, чтобы уменьшить чрезмерные ударные нагрузки и предотвратить усталостное повреждение и падение плода, вызванные частыми столкновениями.
Вязкоупругость плодоножек замедляет реакцию системы, делая процесс затухания вибрации плода более постепенным. Это явление важно для операций по сбору винограда, так как оно свидетельствует, что вязкоупругие свойства плодоножек не следует упускать из виду при проектировании системы вибрационно-ударного взаимодействия. Правильный контроль жесткости и вязкоупругих характеристик плодоножек может повысить качество операций по сбору винограда.
Будущая работа будет сосредоточена на расширении этой модели двойная плодоножка–ягода для симуляции поведения вибрационно-ударного взаимодействия целых виноградных гроздей, что поможет понять динамику вибрации и столкновений во время сбора и транспортировки столового винограда.
Условные обозначения
𝑞 Обобщённые координаты
𝜃 Угол между левой плодоножкой и вертикальным направлением, град.
𝜑 Угол между правой плодоножкой и вертикальным направлением, град.
k0 Коэффициент диссипации сопротивления, Па
k1 Коэффициент упругости соединения между левой плодоножкой и фиксированным стержнем, Па
k2 Коэффициент упругости соединения между правой плодоножкой и фиксированным стержнем, Па
k3 Эквивалентный коэффициент упругости связи k1 и k2, Па
k4 Эквивалентный коэффициент упругости между двумя ягодами, Па
l1 Длина левой плодоножки, мм
l2 Длина правой плодоножки, мм
r1 Радиус левой ягоды, мм
r2 Радиус правой ягоды, мм
m1 Масса левой ягоды, кг
m2 Масса правой ягоды, кг
g Ускорение свободного падения, м/с²
d0 Расстояние между точками крепления плодоножек к фиксированному стержню, мм
𝑇 Функция кинетической энергии системы двойная плодоножка–ягода, Дж
𝑉 Функция потенциальной энергии системы двойная плодоножка–ягода, Дж
𝛿 Глубина взаимного проникновения (деформации при контакте), мм
𝛿˙ Скорость изменения глубины проникновения (относительная скорость сближения), м/с
𝐹𝑛 Ударная (контактная) сила, Н
c1 Коэффициент демпфирования (вязкого сопротивления) для левой плодоножки и фиксированного стержня, Н/(м·с)
c2 Коэффициент демпфирования (вязкого сопротивления) для правой плодоножки и фиксированного стержня, Н/(м·с)
c3 Эквивалентный коэффициент демпфирования связи c1 и c2, Н/(м·с)
c4 Эквивалентный коэффициент демпфирования столкновения между двумя ягодами, Н/(м·с)
𝑄𝑛 Обобщённая контактная сила, Н
𝑄 Обобщённая сила, Н
𝑄𝑗 Составляющая обобщённой силы, исключая обобщённую ударную силу, Н
𝑇 Временной шаг, мс
Ссылки
1. FAO. Grapes Production and Quantity in the World. Available online: https://www.fao.org/faostat/en/#data/QCL (accessed on 30 December 2024).
2. Faheem, M.; Liu, J.; Chang, G.; Ahmad, I.; Peng, Y. Hanging force analysis for realizing low vibration of grape clusters during speedy robotic post-harvest handling. Int. J. Agric. Biol. Eng. 2021, 14, 62–71. [Google Scholar] [CrossRef]
3. Cui, H.; Abdel-Samie, M.A.S.; Lin, L. Novel packaging systems in grape storage—A review. J. Food Process Eng. 2019, 42, e13162. [Google Scholar] [CrossRef]
4. Nicolosi, E.; Ferlito, F.; Amenta, M.; Russo, T.; Rapisarda, P. Changes in the quality and antioxidant components of minimally processed table grapes during storage. Sci. Hortic. 2018, 232, 175–183. [Google Scholar] [CrossRef]
5. Faheem, M.; Liu, J.; Chang, G.; Abbas, I.; Xie, B.; Shan, Z.; Yang, K. Experimental research on grape cluster vibration signals during transportation and placing for harvest and post-harvest handling. Agriculture 2021, 11, 902. [Google Scholar] [CrossRef]
6. Golly, M.K.; Ma, H.; Sarpong, F.; Dotse, B.P.; Oteng-Darko, P.; Dong, Y. Shelf-life extension of grape (Pinot noir) by xanthan gum enriched with ascorbic and citric acid during cold temperature storage. J. Food Sci. Technol. 2019, 56, 4867–4878. [Google Scholar] [CrossRef]
7. Zahedipour, P.; Asghari, M.; Abdollahi, B.; Alizadeh, M.; Danesh, Y.R. A comparative study on quality attributes and physiological responses of organic and conventionally grown table grapes during cold storage. Sci. Hortic. 2019, 247, 86–95. [Google Scholar] [CrossRef]
8. Vazquez-Hernandez, M.; Navarro, S.; Sanchez-Ballesta, M.T.; Merodio, C.; Escribano, M.I. Short-term high CO2 treatment reduces water loss and decay by modulating defense proteins and organic osmolytes in Cardinal table grape after cold storage and shelf-life. Sci. Hortic. 2018, 234, 27–35. [Google Scholar] [CrossRef]
9. Zhang, Z.; Xu, J.; Chen, Y.; Wei, J.; Wu, B. Nitric oxide treatment maintains postharvest quality of table grapes by mitigation of oxidative damage. Postharvest Biol. Technol. 2019, 152, 9–18. [Google Scholar] [CrossRef]
10. Solairaj, D.; Legrand, N.N.G.; Yang, Q.; Liu, J.; Zhang, H. Microclimatic parameters affect Cladosporium rot development and berry quality in table grapes. Horticult. Plant J. 2022, 8, 171–183. [Google Scholar] [CrossRef]
11. Solairaj, D.; Yang, Q.; Legrand, N.N.G.; Routledge, M.N.; Zhang, H. Molecular explication of grape berry-fungal infections and their potential application in recent postharvest infection control strategies. Trends Food Sci. Technol. 2021, 116, 903–917. [Google Scholar] [CrossRef]
12. Yan, Y.; Zhang, X.; Zheng, X.; Apaliya, M.T.; Yang, Q.; Zhao, L.; Gu, X.; Zhang, H. Control of postharvest blue mold decay in pears by Meyerozyma guilliermondii and it’s effects on the protein expression profile of pears. Postharvest Biol. Technol. 2018, 136, 124–131. [Google Scholar] [CrossRef]
13. Zhu, S.; Liu, J.; Yang, Q.; Jin, Y.; Zhao, S.; Tan, Z.; Qiu, J.; Zhang, H. The Impact of Mechanical Compression on the Postharvest Quality of ‘Shine Muscat’ Grapes during Short-Term Storage. Agronomy 2023, 13, 2836. [Google Scholar] [CrossRef]
14. Liang, Z.; Huang, Y.; Li, D.; Wada, M.E. Parameter determination of a viscoelastic–plastic contact model for potatoes during transient collisions. Biosyst. Eng. 2023, 234, 156–171. [Google Scholar] [CrossRef]
15. Ashtiani, S.-H.M.; Sadrnia, H.; Mohammadinezhad, H.; Aghkhani, M.H.; Khojastehpour, M.; Abbaspour-Fard, M.H. FEM-based simulation of the mechanical behavior of grapefruit under compressive loading. Sci. Hortic. 2019, 245, 39–46. [Google Scholar] [CrossRef]
16. Vinokur, Y.; Rodov, V.; Levi, A.; Kaplunov, T.; Zutahy, Y.; Lichter, A. A method for evaluating fruit abscission potential of grapes and cherry tomato clusters. Postharvest Biol. Technol. 2013, 79, 20–23. [Google Scholar] [CrossRef]
17. Horabik, J.; Molenda, M. Parameters and contact models for DEM simulations of agricultural granular materials: A review. Biosyst. Eng. 2016, 147, 206–225. [Google Scholar] [CrossRef]
18. Stropek, Z.; Gołacki, K. A new method for measuring impact related bruises in fruits. Postharvest Biol. Technol. 2015, 110, 131–139. [Google Scholar] [CrossRef]
19. Lu, F.; Ishikawa, Y.; Kitazawa, H.; Satake, T. Measurement of impact pressure and bruising of apple fruit using pressure-sensitive film technique. J. Food Eng. 2010, 96, 614–620. [Google Scholar] [CrossRef]
20. Pezzi, F.; Caprara, C.; Bordini, F. Transmission of impacts during mechanical grape harvesting and transportation. J. Agric. Eng. 2008, 39, 43–48. [Google Scholar] [CrossRef][Green Version]
21. Lu, L. Non-linear viscoelastic modeling of the fruits under dropping impact. Eng. Mech. 2009, 26, 228–233. [Google Scholar]
22. Dintwa, E.; Van Zeebroeck, M.; Ramon, H.; Tijskens, E. Finite element analysis of the dynamic collision of apple fruit. Postharvest Biol. Technol. 2008, 49, 260–276. [Google Scholar] [CrossRef]
23. Bao, Y.; Yang, C.; Zhao, Y.; Liu, X.; Guo, Y. Collision injury assessment of mechanical harvesting blueberry fruit based on collision deformation energy. Trans. Chinese Soc. Agric. Mach. 2017, 33, 283–292. [Google Scholar]
24. Crooke, J.; Rand, R. Vibratory fruit harvesting: A linear theory of fruit-stem dynamics. J. Agric. Eng. Res. 1969, 14, 195–209. [Google Scholar] [CrossRef]
25. Ramli, M.; Hudzari, R.; Wahab, F.; Ghani, M. Determination of frequency properties of Jatropha curcas fruits stalk for mechanical harvesting operations. Int. J. Agric. Sci. 2011, 3, 103. [Google Scholar]
26. Vursavuş, K.K.; Özgüven, F. Determining the effects of vibration parameters and packaging method on mechanical damage in golden delicious apples. Turk. J. Agric. For. 2004, 28, 311–320. [Google Scholar]
27. Opara, U.L.; Fadiji, T. Compression damage susceptibility of apple fruit packed inside ventilated corrugated paperboard package. Sci. Hortic. 2018, 227, 154–161. [Google Scholar] [CrossRef]
28. Cao, X.; Hu, Y.; Xu, T.; Zhang, Y.; Fang, J. Vibration Characteristic and Injury of Huangguan Pear under Stationary Vibration System. Packag. Eng. 2017, 38, 102–107. [Google Scholar]
29. Zhou, J.; He, L.; Karkee, M.; Zhang, Q. Analysis of shaking-induced cherry fruit motion and damage. Biosyst. Eng. 2016, 144, 105–114. [Google Scholar] [CrossRef]
30. Fernando, I.; Fei, J.; Stanley, R.; Rouillard, V. Evaluating packaging performance for bananas under simulated vibration. Food Packag. Shelf Life 2020, 23, 100428. [Google Scholar] [CrossRef]
31. Fischer, D.; Craig, W.; Watada, A.; Douglas, W.; Ashby, B. Simulated in-transit vibration damage to packaged fresh market grapes and strawberries. Appl. Eng. Agric. 1992, 8, 363–366. [Google Scholar] [CrossRef]
32. Liu, J.; Tang, S.; Shan, S.J.J.; Li, M.; Zhu, X. Simulation and test of grape fruit cluster vibration for robotic harvesting. Trans. Chin. Soc. Agric. Mach. 2016, 47, 1–8. [Google Scholar]
33. Schöler, F.; Steinhage, V. Automated 3D reconstruction of grape cluster architecture from sensor data for efficient phenotyping. Comput. Electron. Agric. 2015, 114, 163–177. [Google Scholar] [CrossRef]
34. Huang, C.-Y.; Jheng, W.-T.; Tai, W.-K.; Chang, C.-C.; Way, D.-L. Procedural grape bunch modeling. Comput. Graph. 2013, 37, 225–237. [Google Scholar] [CrossRef]
35. Kondo, N.; Tanihara, K.; Shiigi, T.; Shimizu, H.; Kurita, M.; Tsutsumi, M.; Chong, V.K.; Taniwaki, S. Path planning of tomato cluster harvesting robot for realizing low vibration and speedy transportation. Eng. Agric. Environ. Food 2009, 2, 108–115. [Google Scholar] [CrossRef]
36. Ampatzidis, Y.G.; Vougioukas, S.G.; Whiting, M.D.; Zhang, Q. Applying the machine repair model to improve efficiency of harvesting fruit. Biosyst. Eng. 2014, 120, 25–33. [Google Scholar] [CrossRef]
37. Hoshyarmanesh, H.; Dastgerdi, H.R.; Ghodsi, M.; Khandan, R.; Zareinia, K. Numerical and experimental vibration analysis of olive tree for optimal mechanized harvesting efficiency and productivity. Comput. Electron. Agric. 2017, 132, 34–48. [Google Scholar] [CrossRef]
38. Li, C.; Xing, J.; Xu, L.; Shi, L.; Gao, Z.; Liu, W. Design and Experiment of Wine Grape Trellis Traveling Stripping Platform. Trans. Chin. Soc. Agric. Mach. 2017, 48, 98–103. [Google Scholar]
39. Liu, J.; Yuan, Y.; Gao, Y.; Tang, S.; Li, Z. Virtual model of grip-and-cut picking for simulation of vibration and falling of grape clusters. Trans. ASABE 2019, 62, 603–614. [Google Scholar] [CrossRef]
40. Liu, J.-Z.; Yang, K.-Y. Dynamic modeling of vibration and collision coupling of cluster system for nondestructive harvesting and transportation of fresh grapes. Jiangsu Univ. J. 2022, 43, 178–183. [Google Scholar]
41. Zhao, C.; Fan, J.; Ning, L. Simulation Research on Attitude Solution Method of Micro-Mini Missile. J. Syst. Simul. 2019, 31, 2877–2884. [Google Scholar]
42. Wang, X.; Wang, H.; Zhao, J.; Xu, C.; Luo, Z.; Han, Q. Rigid-flexible coupling dynamics modeling of spatial crank-slider mechanism based on absolute node coordinate formulation. Mathematics 2022, 10, 881. [Google Scholar] [CrossRef]
Xu B, Liu J, Jin Y, Yang K, Zhao S, Peng Y. Vibration–Collision Coupling Modeling in Grape Clusters for Non-Damage Harvesting Operations. Agriculture. 2025; 15(2):154. https://doi.org/10.3390/agriculture15020154
Перевод статьи «Vibration–Collision Coupling Modeling in Grape Clusters for Non-Damage Harvesting Operations» авторов Xu B, Liu J, Jin Y, Yang K, Zhao S, Peng Y., оригинал доступен по ссылке. Лицензия: CC BY. Изменения: переведено на русский язык

















































































































Комментарии (0)