Система управления экспериментальной платформой для уборки тигрового ореха
Исследование системы управления экспериментальной платформой для транспортировки и сепарации тигрового ореха с помощью уборочного комбайна на основе сенсорной технологии и алгоритмов управления.
Аннотация
Повышение интеллекта оборудования для уборки тигрового ореха с развитием сельскохозяйственного машиностроения является необходимостью. Несоответствие между скоростью подачи при выкапывании и возможностями транспортировки-сепарации снижает эффективность уборочных комбайнов для тигрового ореха. Для решения этой проблемы была разработана визуализированная платформа для уборки тигрового ореха, включающая параметры, такие как скорость транспортировки, крутящий момент, частота вибрации и глубина выкапывания. Платформа включает механическую исполнительную часть и систему автоматического управления с модулями контроля скорости, крутящего момента, частоты и глубины. Анализ механического дизайна определил параметры и методы контроля для каждого модуля. Был предложен адаптивный контроллер B-PID для отслеживания траектории, сочетающий метод обратного шага и PID. Была выведена модель управления, учитывающая демпфирование движения и компенсацию ошибок. Симуляции в Simulink сравнили В-PID с контроллерами обратного шага, показав устойчивость В-PID и эффективное отслеживание траектории. Фактические эксперименты оценили координацию между механикой и контролем с использованием метрик относительной ошибки. Результаты показали, что максимальная относительная ошибка скорости вращения составила 3,8%, максимальная относительная ошибка частоты — 3,67%, а максимальная относительная ошибка глубины выкапывания — 1,5%. Были установлены модели корректировки для параметров глубины выкапывания и частоты возбуждения. Это исследование предоставляет теоретическую основу для продвижения интеллектуального дизайна уборочного оборудования для тигрового ореха.
1. Введение
Тигровый орех, научно известный как Cyperus esculentus, представляет собой многофункциональную экономическую культуру, которая синергетически сочетает зерновые, масличные и животноводческие аспекты. Характеризуясь хорошо развитыми корневыми системами, высокой адаптивностью и выраженной устойчивостью к стрессам, этот вид демонстрирует значительный потенциал для сельскохозяйственных и экологических применений [1-3]. Широкомасштабное выращивание тигрового ореха не только способствует улучшению песчаных земель и снижению эрозии от ветра и песка, но также значительно увеличивает экономический доход фермеров, тем самым повышая уровень жизни населения [4]. Синьцзян является важным районом производства тигрового ореха в Китае, и уборка является ключевым этапом в производстве тигрового ореха [5].
Механизм транспортировки и сепарации представляет собой ключевую основную технологию в рамках уборочного комбайна для тигрового ореха, привлекающую обширное внимание ученых и приводящую к заметным достижениям во всем мире. Исторически первый уборочный комбайн для тигрового ореха, введенный в Испании, использовал конфигурацию вибрационного сита для сепарации тигрового ореха, парадигму дизайна, которая продолжает влиять на современные принципы работы [6]. Чжао и др. [7] представили устройство на основе скребка для транспортировки тигрового ореха. Хэ и соавторы [8] разработали механизм транспортировки тигрового ореха. Лв Чжицзюнь и др. [9] спроектировали пульсирующее устройство для очистки роликов для повышения эффективности уборки тигрового ореха. Пэй Минхао и др. [10] провели механические испытания и анализ взаимодействия между вибрационной лопатой для выкапывания и ротационными лезвиями на корнево-песчаном комплексе Cyperus esculentus для установления оптимизированной модели комбинации параметров.
В последние годы значительный объем исследований сосредоточен на интеграции механических компонентов с сенсорной технологией, алгоритмами управления и другими передовыми методологиями для повышения интеллекта сельскохозяйственных производственных процессов [11-15]. В плане электронных приложений, таких как ПЛК или микроконтроллер, Чэн Пэнфэй и др. [16] использовали датчик расстояния для сбора сигнала толщины кусков картофеля во время транспортировки. После обработки системой управления ПЛК программа автоматически контролировала преобразователь частоты для регулировки двигателя преобразователя частоты, достигая требования постоянного расхода сортировки для оборудования по очистке картофеля. Лоу Сюхуа и др. [17] предложили стратегию совместного управления двумя целями и алгоритм управления. Они построили систему управления очисткой комбайна для совместной уборки кукурузы. Вэй Дэсинь и др. [18] разработали систему онлайн-мониторинга потерь при очистке уборочных комбайнов для зерен кукурузы. Средние ставки потерь при очистке, измеренные системой мониторинга, составили 1,41%, 1,58% и 1,83% при рабочих скоростях 0,8,1,0 и 1,2 м.с-1 соответственно. Мирзазаде и др. [19] разработали систему очистки зерна для комбайнов и предложили модель RSM для системы очистки зерноуборочного комбайна. Они определили оптимальные условия для прохождения зерновых частиц через верхнее и нижнее сита: скорость подачи 3,33 кг/с, скорость вентилятора 742 об/мин, апертура 10 мм и идеальное значение 0,84. В плане применения алгоритма управления PID Чэнь Чживэй и др. [20] построили систему измерения и управления для испытательного стенда сепарации и очистки тигрового ореха, которая достигла точного контроля скорости, сбора основных тестовых данных, контроля системы подачи и других функциональных требований. В соответствии с требованиями стенда алгоритм управления PID был добавлен к контролю скорости вентилятора для достижения цели точного контроля. Шангуань Цзэчао и др. [21] спроектировали систему мониторинга и управления комбайном для кукурузы на основе STM32 и реализовали нечеткое PID-управление для нелинейных систем управления.
На основе вышеуказанных исследований, направленных на проблемы низкой эффективности, вызванные несоответствием между объемом подачи при выкапывании и объемом транспортировки-сепарации в существующей платформе для уборки и транспортировки- сепарации тигрового ореха, мы спроектировали платформу для уборки и транспортировки- сепарации тигрового ореха, которая может реализовать функции визуализации и регулировки рабочих параметров, таких как скорость транспортировки, крутящий момент транспортировки, частота вибрации и глубина выкапывания. Датчик крутящего момента и датчик угла наклона были использованы для получения параметров, таких как крутящий момент шнека и глубина выкапывания, и адаптивный контроллер В-PID был применен для отслеживания и обнаружения траектории глубины выкапывания. На этой основе относительная ошибка была в конечном итоге принята в качестве индекса оценки. Координация между механическим исполнением и автоматическим управлением была протестирована для поддержки разработки интеллектуального уборочного оборудования для тигрового ореха в песчаной зоне Синьцзяна.
2. Материалы и методы
Платформа для уборки, транспортировки и сепарации в основном состояла из устройства ротационного вспашки для выкапывания, пятиступенчатого шнекового транспортирующего устройства, вибрационного сита, системы автоматического управления и рамы. Среди них устройство ротационного вспашки для выкапывания в основном включало ротационные лезвия для вспашки, лопаты, колеса ограничения глубины и т.д. Пятиступенчатое шнековое устройство состояло из первой ступени шнека, второй ступени шнека, третьей ступени шнека, четвертой ступени шнека и пятой ступени шнека. Вибрационное сито в основном включало переднее вибрационное сито, заднее сито и устройство возбуждения. Система автоматического управления в основном состояла из модуля контроля скорости шнека, модуля обнаружения крутящего момента шнека, модуля контроля частоты возбуждения и модуля обнаружения глубины выкапывания. Параметры скорости и частоты возбуждения каждой ступени спирального шнека устанавливались через интерфейс взаимодействия человека и машины внутри блока управления. Модуль обнаружения крутящего момента шнека использовал датчики крутящего момента для измерения крутящего момента, генерируемого каждой ступенью спирального шнека во время работы. Модуль обнаружения глубины выкапывания в основном использовал угол наклона колеса ограничения глубины, измеряемый датчиком наклона, для расчета глубины выкапывания ротационного вспашки, тем самым отражая объем подачи материала уборочного комбайна за единицу времени. Общая структура показана на рисунке 1.
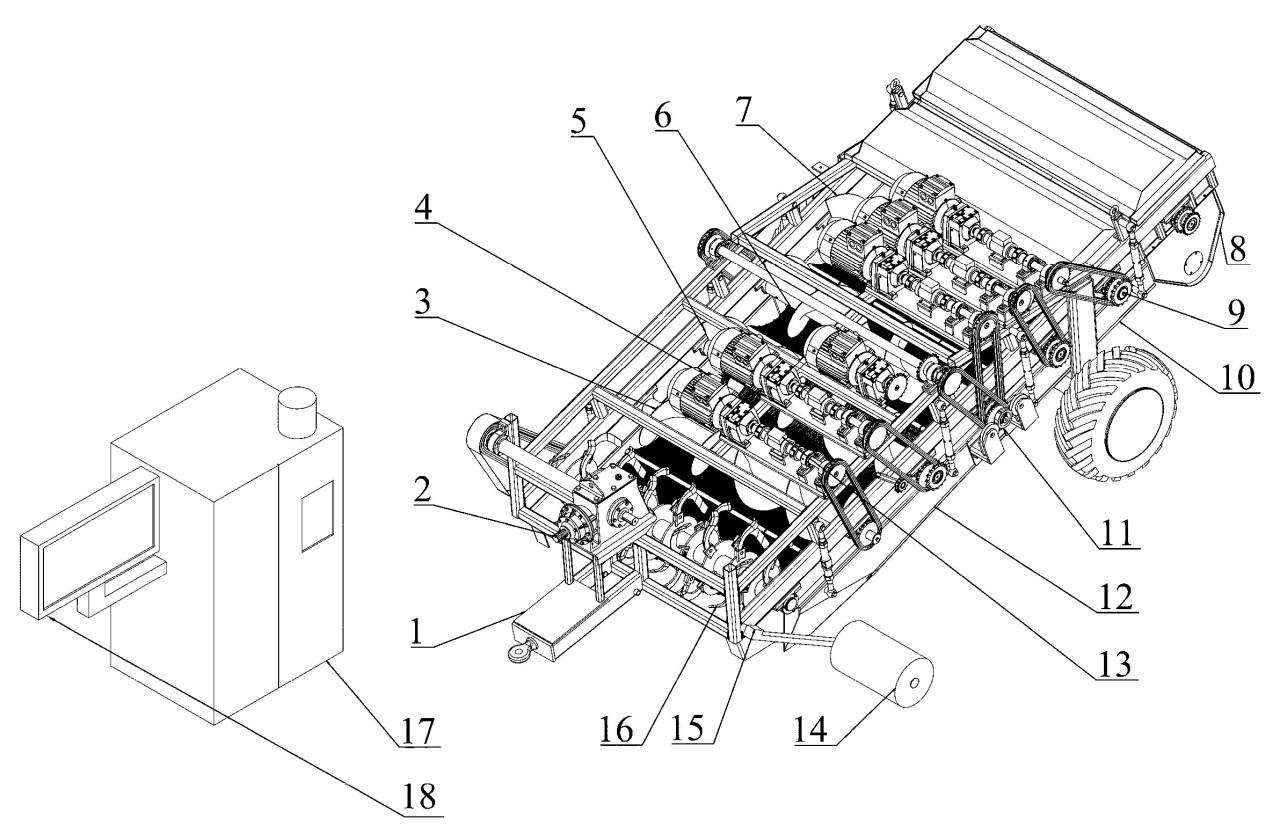
Рисунок 1. Глобальная структура платформы для уборки, транспортировки и сепарации. 1. Рама, 2. Устройство ввода мощности, 3. Первая ступень шнека, 4. Устройство мощности скручивания, 5. Вторая ступень шнека, 6. Третья ступень шнека, 7. Четвертая ступень шнека, 8. Бункер для материала, 9. Пятая ступень шнека, 10. Заднее вибрационное сито, 11. Устройство возбуждения, 12. Переднее вибрационное сито, 13. Датчик крутящего момента, 14. Колесо ограничения глубины, 15. Датчик угла наклона, 16. Устройство ротационного вспашки для выкапывания, 17. Электрический блок управления, 18. Устройство визуализации.
Во время работы устройство ротационного вспашки для выкапывания выбрасывало смесь тигрового ореха, корней, почвенных агрегатов и песка на вибрационное сито. Этот выброс достигался за счет осевого движения шнека в пределах данной ступени и радиального движения между соседними ступенями шнека. Взаимодействие между устройством возбуждения и передним и задним корпусами сита разделяло корпуса сита. Одновременно возвратная пружина способствовала их сближению, вызывая возвратно-периодическую вибрацию в корпусах сита. Одновременно нижний монитор ПЛК получал рабочие инструкции от верхнего монитора HMI через порт Ю, регулируя скорость вращения шнека и глубину выкапывания. Затем ПЛК передавал конкретные значения скорости и глубины на интерфейс HMI через аналоговые сигналы.
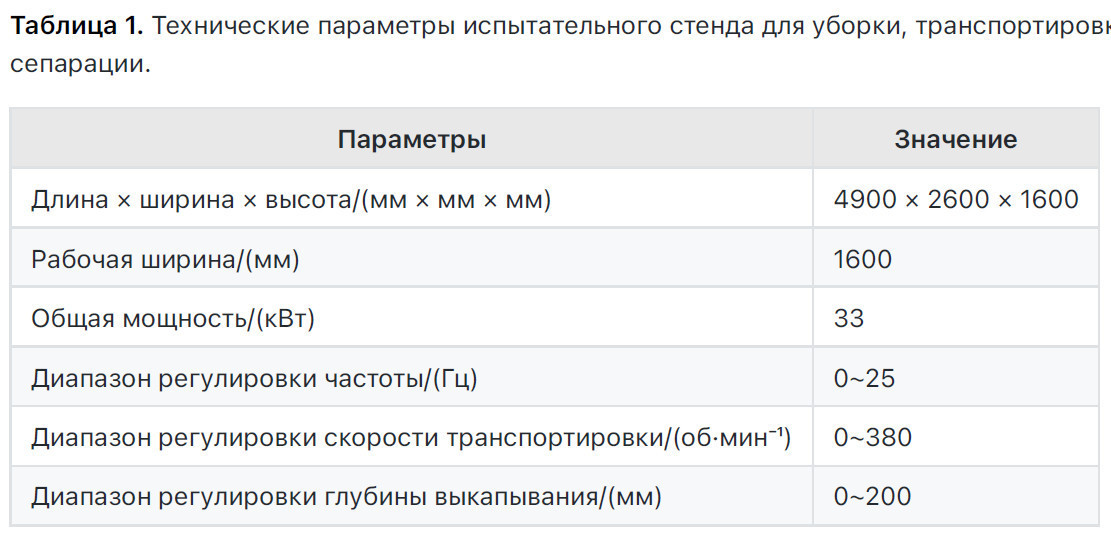
Синергетическое взаимодействие между спиральным транспортером и вибрационным ситом способствовало разрыхлению смеси. Это способствовало просачиванию песка через отверстия сита и нарушало структурную cohesive смеси. Следовательно, этот процесс улучшал сепарацию тигрового ореха и корней от песчаной матрицы. Рабочие параметры платформы для испытаний уборки, транспортировки и сепарации подробно описаны в таблице 1.
Лопасти одноступенчатого спирального шнекового транспортера были спроектированы как с левым, так и с правым винтом. Противоположные направления винта достигали транспортировки материала к центру. Каждая ступень шнекового транспортера использовала симметричное распределение лопастей с левым и правым винтом. Конкретно, рабочие длины лопастей с левым и правым винтом были идентичны. Комбинированное действие этих двух лопастей винта способствовало передаче материала на последующую ступень шнекового транспортера, тем самым повышая коэффициент использования каждой ступени. Размеры спирального шнекового транспортера иллюстрированы на рисунке 2. Вал шнекового транспортера имел длину 1834 мм. Рабочие длины секций лопастей с левым и правым винтом составляли по 800 мм каждая. Внешний диаметр вала шнекового транспортера составлял 108 мм, в то время как внешний диаметр лопастей винта — 400 мм.
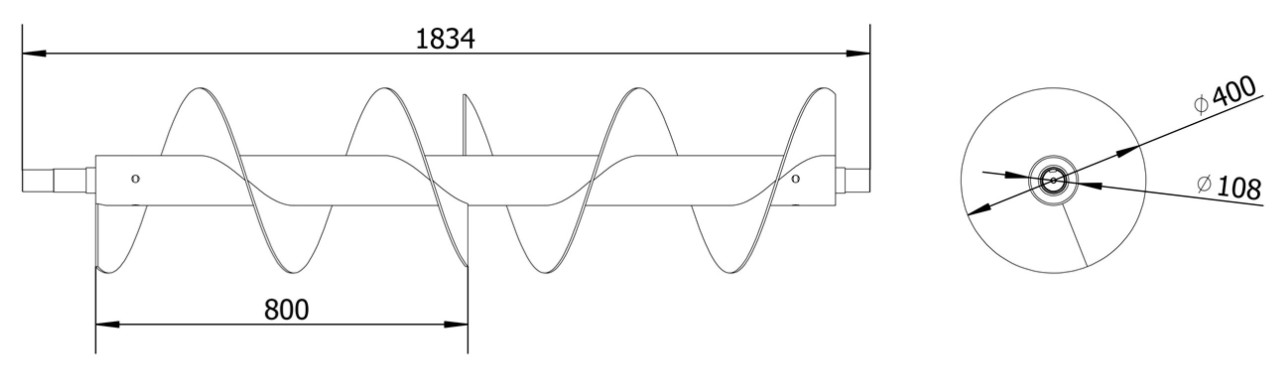
Рисунок 2. Размер спирального шнека.
В процессе выброса материала скорость вращения предыдущей ступени шнека определяла линейную скорость подачи последующей ступени. Конкретно, увеличенная скорость шнека приводила к более высокой начальной скорости выброса, как иллюстрировано на рисунке 3. Когда начальная скорость выброса (Vol) была установлена на более низкое значение во время выброса песка, гравитационные эффекты приводили к траектории материала (11), которая не напрямую пересекала зону осевого действия шнека, приводя к накоплению материала в нижней части шнека и препятствуя транспорту. Напротив, высокая скорость выброса (Vc3) вызывала удар песка о корпус машины в верхней части шнека, приводя к отскоку и предотвращению осевого движения (траектория I3). Оптимальная начальная скорость выброса (Vc2), промежуточная между вышеуказанными крайностями, приводила к тому, что песок эффективно проецировался в шнек для осевого транспорта по траектории I2. Для максимизации пропускной способности песка, продления времени удержания материала в шнеке и повышения эффективности удаления песка была нацелена траектория I2. Это требовало скорости вращения шнека, которая избегала как чрезмерно высоких, так и низких значений. Последующий выбор экспериментальных параметров включал исследование скорости вращения шнека, с диапазоном переменных, информированным предыдущими результатами исследовательской группы, которые установили максимальную скорость вращения шнека 280 об/мин [22].
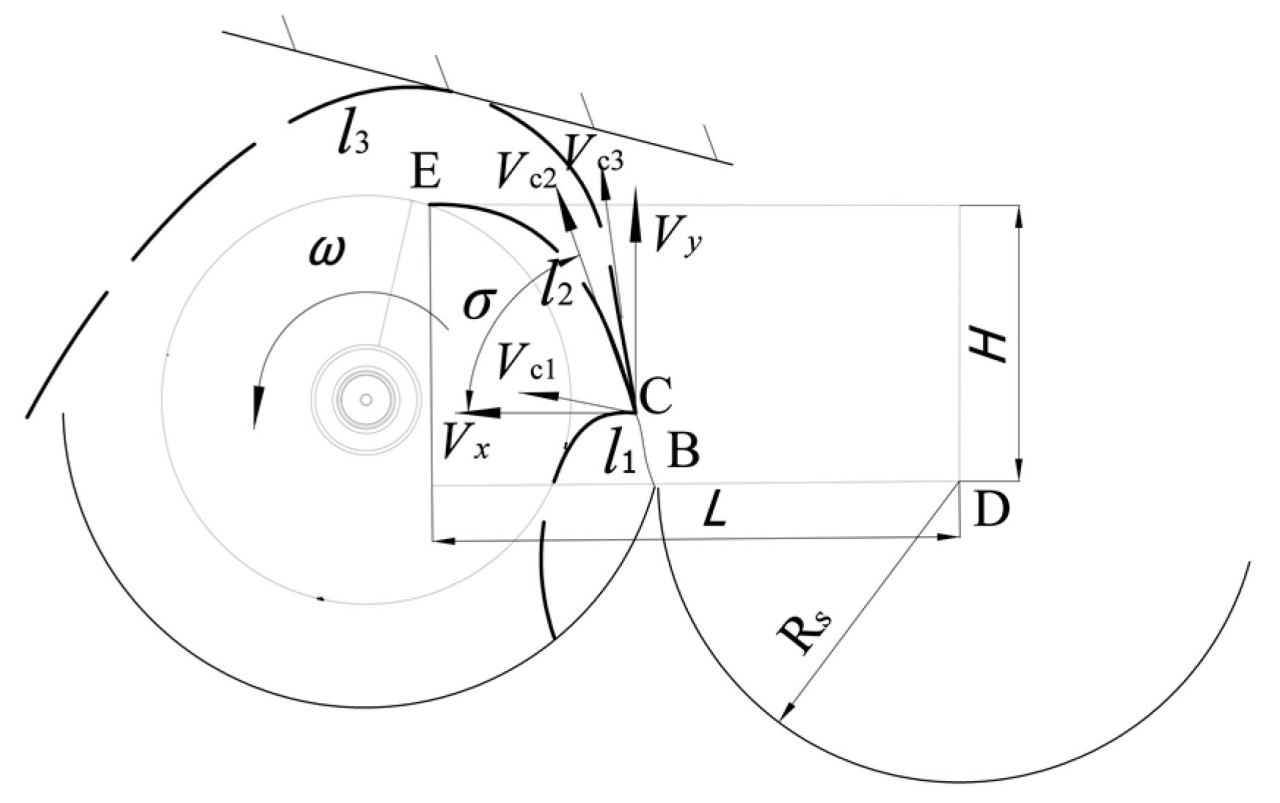
Рисунок 3. Анализ скорости материала во время процесса после выброса.
После выброса материалов, таких как песок, в последующую ступень шнекового транспортера была идентифицирована оптимальная зона осаждения материала. Точка D была обозначена как начало координат (0,0). Для обеспечения бесперебойной подачи материала в эту оптимальную зону требовалось выполнение следующих условий.
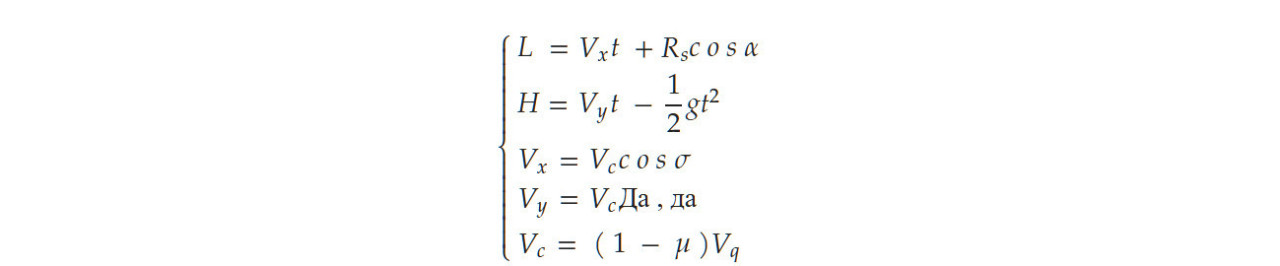
В формуле L представляет горизонтальное расстояние между материалом и валом шнека на его апогее, составляющее 580 мм; Н — вертикальное расстояние от материала до вала шнека на его высшей точке, в диапазоне от 210 до 400 мм. Радиус сита Rs составлял 0,254 м. Vx обозначает компоненту начальной скорости материала в направлении X, в то время как Vy указывает компоненту в направлении Y. Время для достижения материалом его зенита обозначается t; а — угол между машиной и землей, принятый как 10°. о обозначает угол между скоростью выброса материала и землей, измеренный как 65,5°. Коэффициент трения между песком и сталью ц равен 0,43. Vq — линейная скорость материала на периферии предыдущего корпуса сита, a Vc — начальная скорость, с которой материал был выброшен.
Начальная скорость песчаных частиц была рассчитана из уравнения (1) как 2,5-3,2 м.с-1. Затем линейная скорость материала на краю предыдущего корпуса сита была определена как 4,5-5,7 м.с-1. Применение уравнения (2) дало минимальную скорость вращения шнека 169 об.мин-1. Однако из-за наличия значительного зазора между фактическим корпусом сита и шнеком, заполненного значительным количеством песка, почвы и других примесей, линейная скорость материала в точке В снижалась во время работы. Поэтому для достижения целевой линейной скорости минимальная рабочая скорость вращения шнека должна превышать 169 об.мин-1.

Переменные vq, п и Rs определяются следующим образом:
vq — линейная скорость материала на краю предыдущего корпуса сита, м.с-1; n — скорость вращения вала шнека, об.мин-1; Rs — радиус вращения сетки сита, м.
Во время работы шнекового устройства оператор первоначально выбирал необходимую скорость шнека через интерфейс взаимодействия человека и машины (HMI). Затем верхний компьютер HMI передавал инструкции нижнему компьютеру Programmable Logic Controller (PLC) через сигнал связи. После получения этого сигнала ПЛК передавал инструкцию для модуляции преобразователя частоты, который, в свою очередь, регулировал скорость двигателя, изменяя частоту его рабочего питания, тем самым достигая предполагаемой регулировки скорости вращения шнека. Соответствующая блок-схема представлена на рисунке 4.
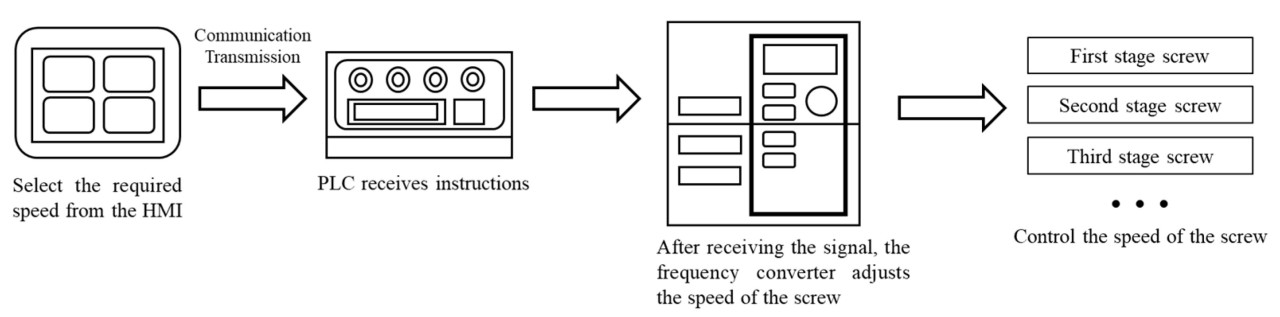
Рисунок 4. Процесс контроля скорости шнека.
Устройство контроля скорости шнека включало сенсорный экран, ПЛК, двигатель, инвертор и другие аппаратные компоненты. Учитывая, что тигровый орех выращивается в основном в песчаной почве, и уборка генерирует значительное количество пыли, обзор соответствующей литературы [23-25] информировал выбор resistive сенсорного экрана для обеспечения надежной работы в суровой среде. Это решение учитывало стоимость, функциональность и устойчивость к окружающей среде, в конечном итоге приведя к выбору resistive сенсорного экрана MT6071IQ (Willcom, Шэньчжэнь, Китай). Выбор ПЛК основывался на конкретных рабочих требованиях, включая количество входов/выходов (I/O), необходимые функциональные модули, рабочую среду и скорость обработки. После обзора соответствующей литературы [26-30] был выбран ПЛК серии DELTA DVP ES2 (DELTA, Уцзян, Китай) за его соответствие рабочим требованиям уборочного комбайна для тигрового ореха. Этот ПЛК был соединен с HMI через порт RS422, подключен к шести преобразователям частоты через порт связи RS485 и связан с модулем расширения аналоговых сигналов через выделенную линию связи. Для облегчения эффективного контроля и надежной работы во время процесса шнековой транспортировки и вибрационного просеивания для удаления тигрового ореха и другого растительного материала был выбран трехфазный асинхронный двигатель серии YE3. Наконец, учитывая рабочие нужды уборочного комбайна для тигрового ореха, был выбран преобразователь частоты серии Canroon CV900G (Сапгооп, Шэньчжэнь, Китай) для регулировки частоты приводного двигателя.
Винтовой узел состоял из вала шнека и лево- и правовращающихся спиральных лопастей, сваренных вместе. Изготовленный из материала Q235, шнек был подвергнут чернению. Во время транспортировки смеси тигрового ореха, корней и почвы высокоскоростное вращение вала шнека и лопастей порождало значительную вибрацию. Эта вибрация, усугубляемая процессом вибрационного просеивания всей машины, вызывала вибрации внутри компонентов шнека. Потенциал резонансного повреждения от усталости структурных компонентов, влияющего на эффективность работы шнека и представляющего риск безопасности, требовал модального анализа. Этот анализ был выполнен с использованием программного обеспечения Workbench (2022 R1), давая первые шесть собственных частот шнека. Максимальная деформация смещения вала шнека и спиральных лопастей на различных частотах была затем проанализирована для оценки структурной целостности и рациональности дизайна. Модель шнека, созданная в SolidWorks, была импортирована в Workbench, назначены свойства материала Q235, и создана сетка, приводящая к модели конечных элементов с 257 001 узлом и 105 018 элементами.
В местах расположения подшипников на обоих концах вала винта были применены ограничения, после чего были рассчитаны первые шесть мод. Результаты численного моделирования представлены на рисунке 5 и в таблице 2.
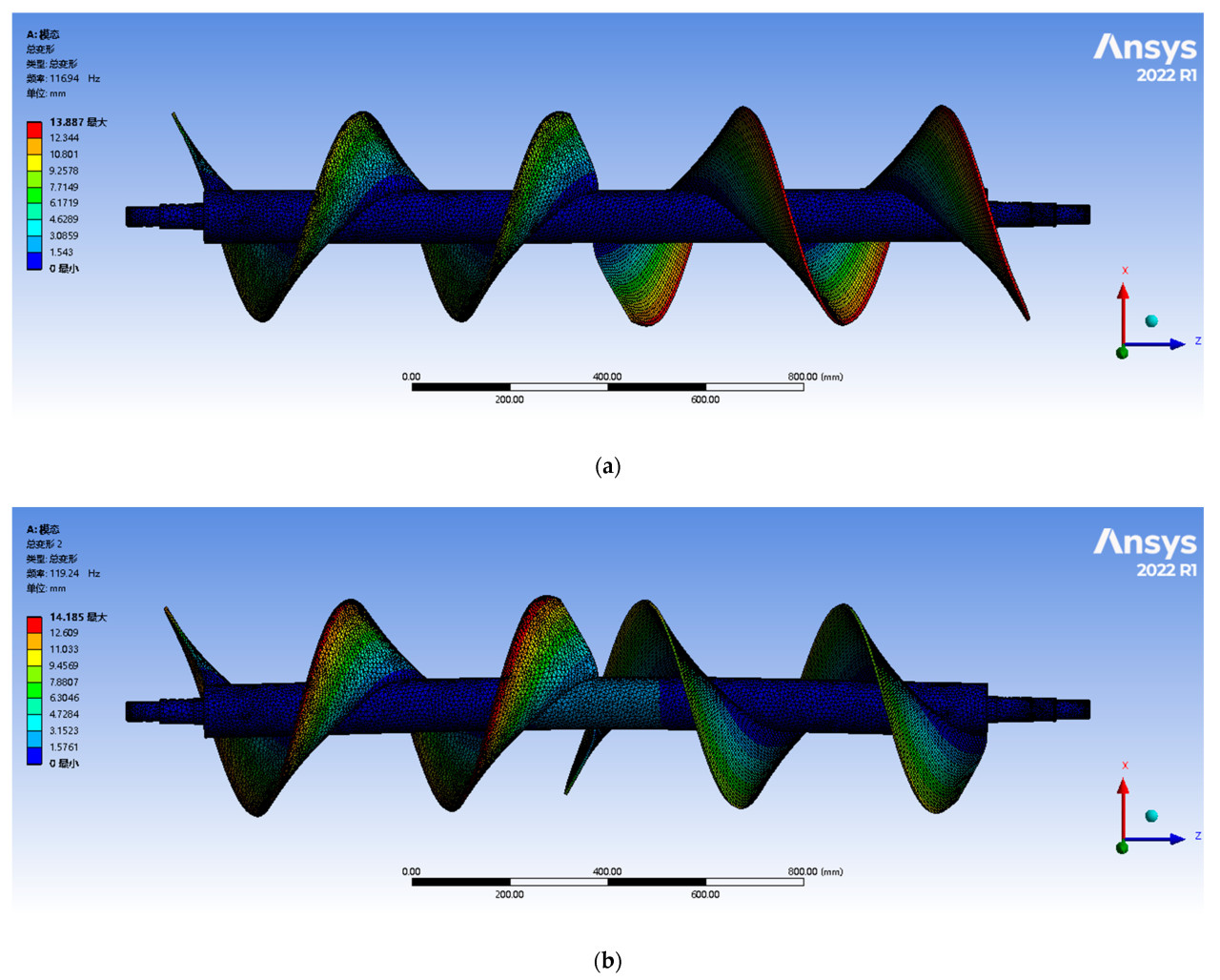
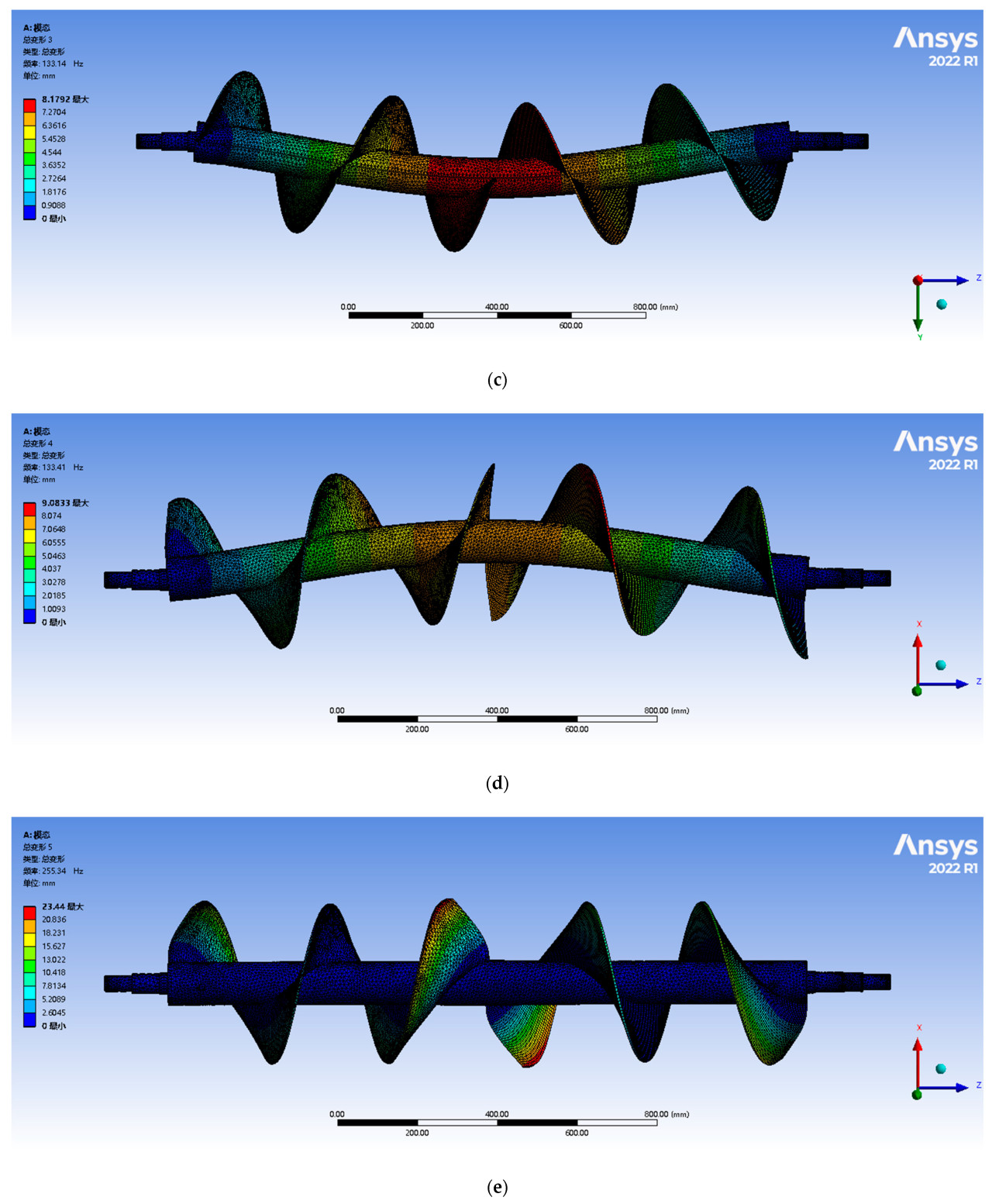
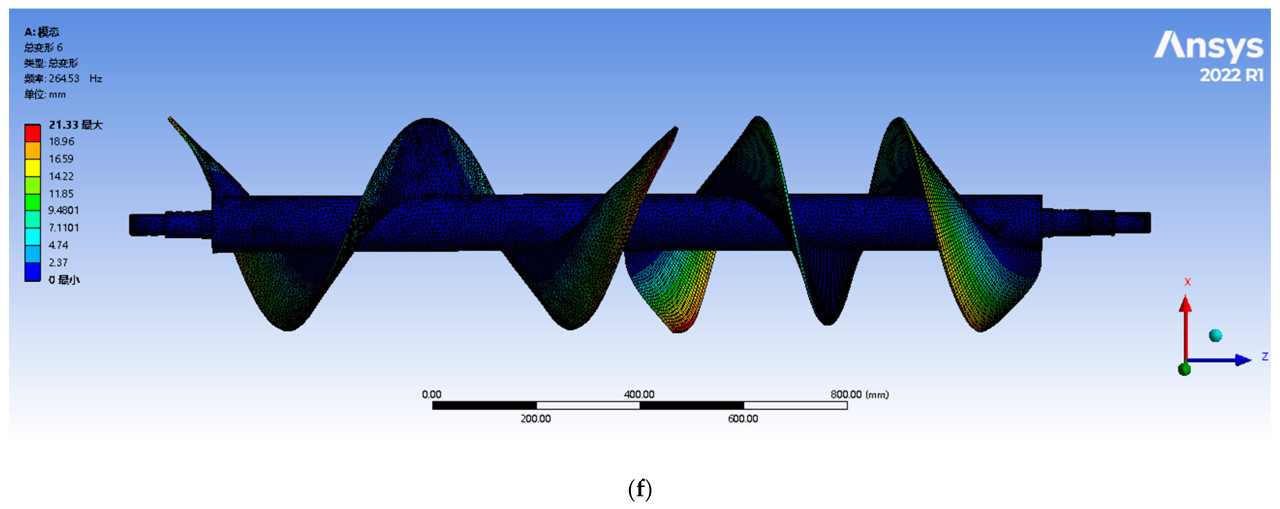
Рисунок 5. Модальный анализ первых шести порядков вибрации шнека, (а) Первый порядок; (Ь) Второй порядок; (с) Третий порядок; (d) Четвертый порядок; (е) Пятый порядок; (f) Шестой порядок.

Из таблицы 2 было замечено, что начальные шесть собственных частот шнека варьировались от 116,94 до 264,53 Гц, с деформацией смещения, варьирующейся между 8,179 и 23,44 мм. Шестая мода демонстрировала самую высокую собственную частоту 264,53 Гц, в то время как пятая мода демонстрировала самую большую деформацию смещения 23,44 мм. Каждая из этих собственных частот была связана с ее конкретной модой вибрации. Распределение интенсивности вибрации по разным частям шнека и его вибрационный отклик под каждой соответствующей модой были проанализированы. Интервалы между соседними частотами были заметно близки в пределах первых шести собственных частот. Собственные частоты, соответствующие друг другу, отличались в основном направлением вибрации, но конфигурации мод вибрации оставались поразительно похожими. Как показано на рисунке 4, вибрация шнека преимущественно включала изгибную деформацию как центра вала шнека, так и спиральной лопасти. Под первой, второй, пятой и шестой модами вибрации максимальная деформация происходила на внешнем крае спиральной лопасти. Напротив, под условиями третьей и четвертой мод вибрации максимальная деформация была центрирована на валу шнека. Этот анализ подчеркивает сложное вибрационное поведение, присущее структурной динамике шнека.
Предопределенная скорость вращения шнека 280 об/мин была использована, и рабочая частота возбуждения шнека была впоследствии рассчитана как 4,67 Гц с использованием формулы собственной частоты f - п/60. Сравнительный анализ результатов моделирования и теоретических результатов показал, что рабочая частота возбуждения была значительно ниже первых шести собственных частот мод вибрации шнека. Это открытие указывало на отсутствие резонанса во время работы и подтверждало рациональность дизайна.
Крутящий момент шнека измерялся в первую очередь для определения рабочего крутящего момента пятиступенчатого шнека. Датчик крутящего момента был установлен между двигателем и устройством шнека через два муфты, как показано на рисунке 6. Этот датчик измерял рабочий крутящий момент устройства шнека, отображая данные на интерфейсе человека-компьютера (HCI) для облегчения анализа рабочего состояния шнека в вибрационном сите. HCI предоставлял реальное время значения крутящего момента для каждой ступени работы шнека и позволял кнопочное управление запуском и остановкой.
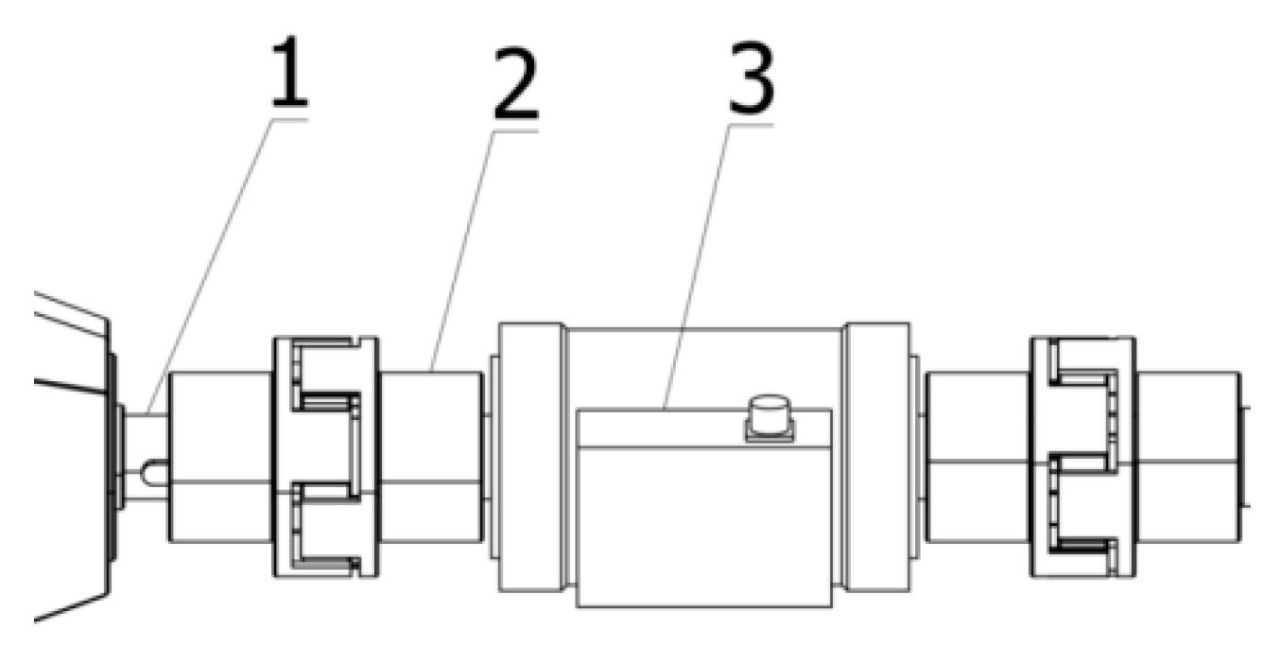
Рисунок 6. Аппаратная структура системы обнаружения крутящего момента шнека. 1. Вал двигателя, 2. Муфта, 3. DYN-210 датчик крутящего момента.
Нижний компьютер этой системы использовал ES2 ПЛК из серии DVP компании DELTA (DELTA, Уцзян, Китай), в то время как верхний компьютер использовал resistive сенсорный экран MT6071IQ от Willcom Technology Со., Ltd. (Willcom, Шэньчжэнь, Китай). Датчик крутящего момента DY-300N Bengbu (DaYang, Бенгбу, Китай) был выбран для измерения рабочего крутящего момента шнека. Интерфейс человека-машины (HMI) в основном состоял из модуля статуса работы и модуля установки параметров, который позволял регулировку обнаружения скорости вращения и крутящего момента. Интерфейс HMI был разработан с использованием программного обеспечения DOPSoft (1.01.10). Дизайн интерфейса представлен на рисунке 7.
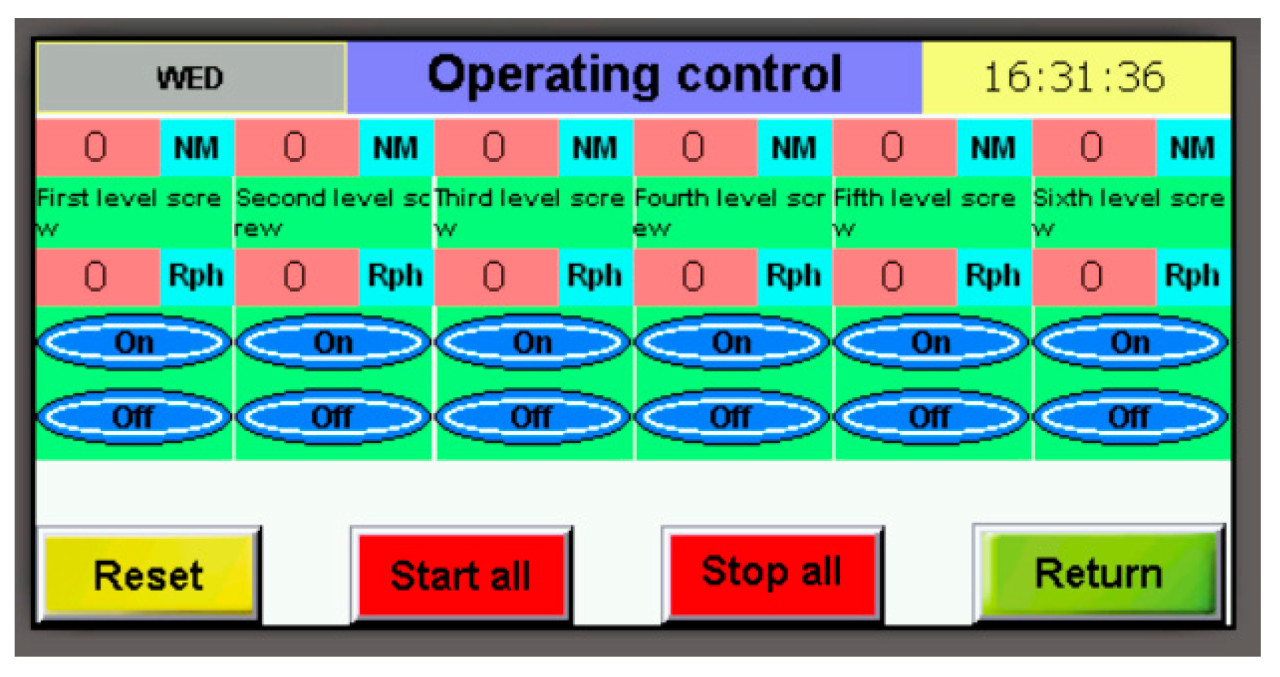
Рисунок 7. Интерфейс HMI системы обнаружения крутящего момента и скорости шнека.
Вибрационное сито в основном состояло из переднего сита, заднего сита, генератора вибрации, соединительных стержней и других компонентов. Переднее и заднее сита, построенные из прутков сита и ребристых пластин, сваренных вместе, были соединены с рамой через соединительные стержни и генератор вибрации, который включал возбудитель, вибрационные ролики и пружины. Возбудительный ролик был прикреплен к каждому из переднего и заднего сит. Эти ролики в первую очередь приводили в движение движение тела сита от возбудителя. Напротив, два сита, соединенные пружинами, облегчали сброс тела сита к возбудителю. Схематическая диаграмма структуры тела вибрационного сита представлена на рисунке 8. Учитывая рабочие требования обработки смеси с высокой массой подачи и удаления песка и почвы, процесс дизайна кулачка требовал учета как высокоскоростных, так и тяжелонагруженных характеристик для повышения частоты вибрации. Четырехдуговой кулачок был использован для возбуждения. Чтобы обеспечить плавный и стабильный контакт шейкера-возбудительного ролика и удовлетворять требованиям хода тела сита, контур возбудительного ролика был спроектирован таким образом, что фаза подъема кулачка соответствовала синусоидальному ускоряющему движению во время фазы подъема процесса возбуждения.
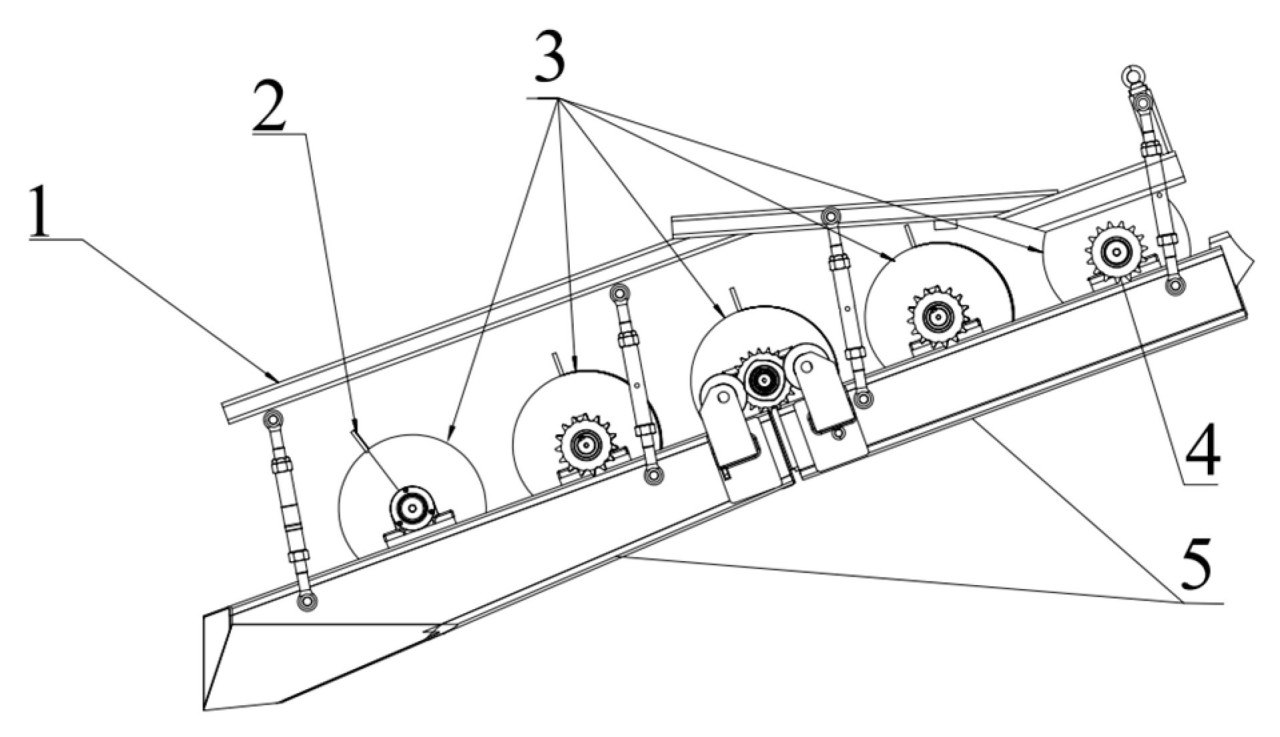
Рисунок 8. Схематическая диаграмма структуры вибрационного сита. 1. Структура рамы, 2. Система антиблокировки, 3. Шнековый транспортер, 4. Система передачи мощности, 5. Вибрационное сито.
Работа вибрационного сита включала возбудитель, который приводился в движение силовым валом, вращаясь и одновременно смещая вибрационный ролик от движения возбудителя. Это приводило к тому, что тело сита двигалось от возбудителя, заставляя переднее сито. Как переднее сито, так и заднее сито переходили из статического состояния в состояние движения, когда было пройдено определенное расстояние. В этот момент пружина сбрасывала переднее сито и заднее сито, тем самым инициируя возвратно-поступательную вибрацию тела сита. Вибрация тела сита эффективно разделяла тигровый орех, корни, песок и другие смеси. Материал был разрыхлен, с песком, падающим в зазор прутка сита и в конечном итоге удаляемым из системы.
Для оптимизации производительности просеивания используется связь между размером частиц материала и параметрами вибрации тела сита: большие частицы лучше разделяются с использованием высоких амплитуд, низкочастотных вибраций, и наоборот, маленькие частицы более эффективно просеиваются при низких амплитудах, высоких частотах [31]. Система контроля частоты возбуждения выводит команды через порт Ю ПЛК для контроля скорости двигателя, тем самым регулируя скорость возбудительного кулачка и эксцентрикового колеса. Учитывая, что материал просеивания в основном состоял из песка и почвы, использовалась малая амплитуда и высокая частота. Исследования [32-35] сообщили о частоте вибрации 7 Гц для промежуточного значения уровня теста во время процесса очистки тигрового ореха и касторового масла.
Напротив, статья [36] сообщила, что максимальное значение частоты вибрации составляло 9 Гц в процессе сепарации почвы картофеля. Это было актуально для сценариев, где диаметр апертуры сетки сита был малым, и для песчаных материалов с мелким размером частиц. В сочетании с процессом уборки тигрового ореха, требованиями сепарации песка и почвы и результатами предварительных экспериментов максимальный параметр частоты вибрации был определен как 9 Гц. Максимальное значение параметра частоты вибрации составляло 9 Гц, и 7 Гц было принято как промежуточный уровень для выбора экспериментальных переменных факторов в последующей фазе.
Комплекс тигровый орех-корень-песчаная почва был одним из объектов, использованных в исследовании геометрии уборочного орудия и его основных параметров, что требовало определения размеров, таких как размер комплекса. Во время периода уборки тигрового ореха был использован метод пяти точек для выбора тестовой области, где сегмент 1 м х 1 м комплекса тигровый орех-корень-песчаная почва был отобран. Штангенциркули (максимальная длина измерения: 150 мм, точность измерения: 0,02 мм) и стальная рулетка (максимальная длина измерения: 5000 мм, точность измерения: 1 мм) были использованы для определения диаметра стебля комплекса, высоты стебля, глубины роста щетины, ширины роста и других размерных параметров. Одновременно качество комплекса, песка в нем, а также тигрового ореха, корней и почвы были оценены. Масса композита, масса песка и почвы в нем и масса тигрового ореха и корней были также определены. Впоследствии были рассчитаны массовые отношения песка и почвы и тигрового ореха и корней в композите соответственно.
Результаты указывали, что средние значения диаметра стебля композита, высоты стебля, глубины роста и ширины составляли 5,2 ± 0,77 мм, 84 ± 4,53 мм, 114 ± 3,47 мм и 162 ± 7,02 мм соответственно. Следовательно, было наблюдаемо, что среднее значение диаметра стебля композита составляло 5,2 ± 0,77 мм, а ширина — 162 ± 7,02 мм. Чтобы обеспечить низкое повреждение выкапывания тигрового ореха, было определено, что глубина выкапывания машины должна превышать 120 мм во время работы.
Во время работы ротационный резак уборочного комбайна входил в почву, выполняя действие вспашки. Глубина этой операции регулировалась колесом ограничения глубины. Контакт между колесом ограничения глубины и почвой генерировал реактивную силу, которая, через опорный стержень, поднимала передний конец уборочного комбайна (т.е. устройство ротационного вспашки). Датчик наклона, расположенный на опорном стержне, измерял угол а между опорным стержнем и землей. Эта угловая информация преображалась в электрический сигнал передатчиком и впоследствии передавалась контроллеру. Глубина вспашки h ротационного ножа затем вычислялась с использованием предварительно установленной геометрической математической модели, относящейся к глубине вспашки и измеренному углу. Эта рассчитанная глубина наконец передавалась на интерфейс человека-машины (HMI). Геометрическое соотношение изображено на рисунке 9.
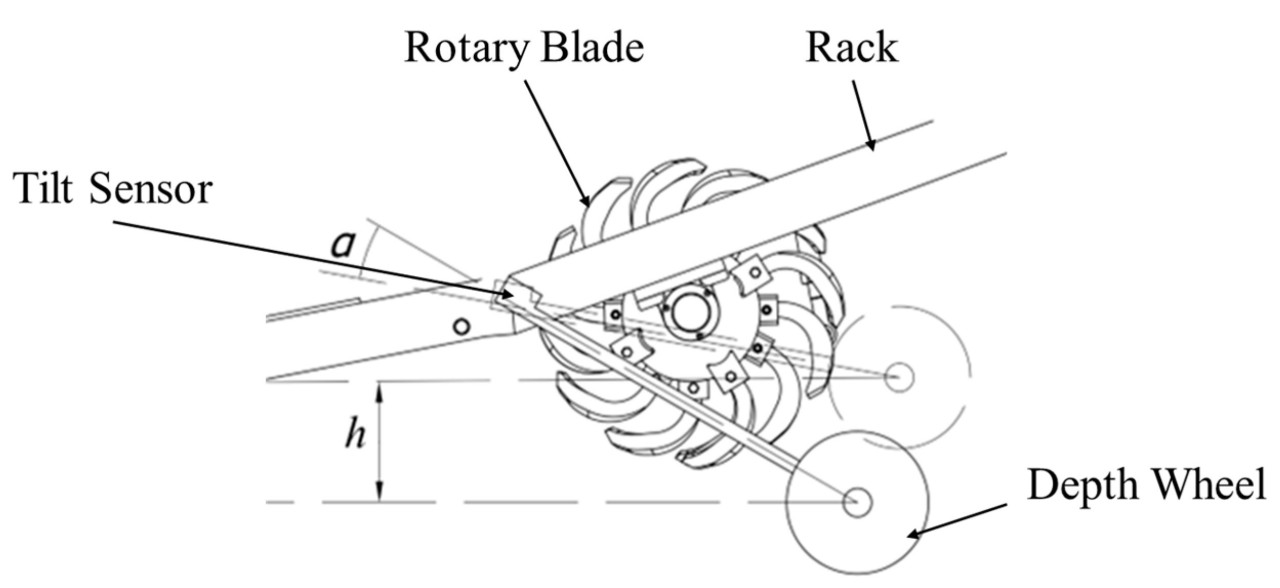
Рисунок 9. Геометрия колеса ограничения глубины обработки почвы ротационного культиватора.
Аппаратная конфигурация системы обнаружения глубины выкапывания включала датчик наклона входа, ротационный нож, колесо ограничения глубины и опорную раму. Датчик наклона входа использовал устройство LCA318T, в первую очередь предназначенное для измерения глубины выкапывания ротационного культиватора. Этот датчик наклона почвы был соединен с аналоговыми портами ввода/вывода ПЛК. Во время обнаружения глубины тестовая штанга первоначально обнулялась через интерфейс HMI перед получением значения глубины. Эта процедура иллюстрирована на рисунке 10.
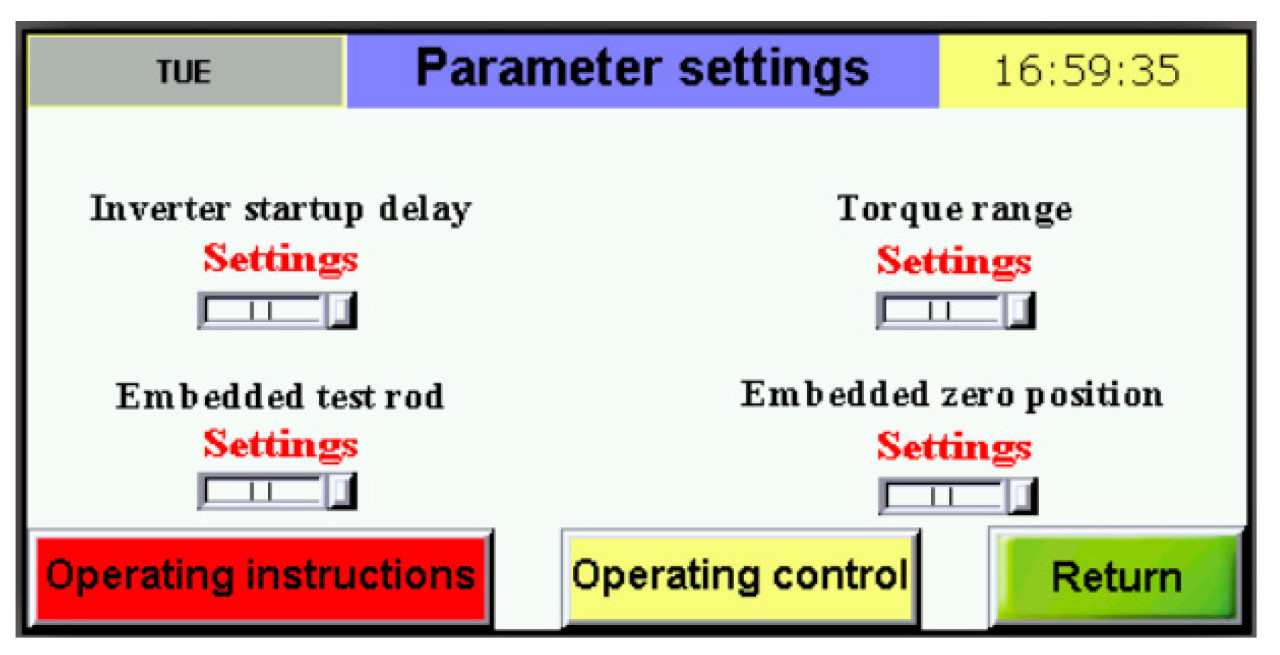
Рисунок 10. Интерфейс обнуления системы обнаружения глубины выкапывания.
Принцип системы управления
В активной области Q существует фактическое число 5 > 0 для системы для любого выбранного фактического числа е > 0. Состояние равновесия считается устойчивым в смысле Ляпунова, когда оно удовлетворяет (3) и когда решения от любого х0 удовлетворяют (4) [37-39].

В фактических инженерных проблемах, если состояние равновесия хе устойчиво в смысле Ляпунова и устойчивое состояние хе возмущено, оно в конечном итоге сойдется к хе. Согласно второму закону Ляпунова, т.е. достигает функции Ляпунова V, которая положительно определена, и V отрицательно определена.
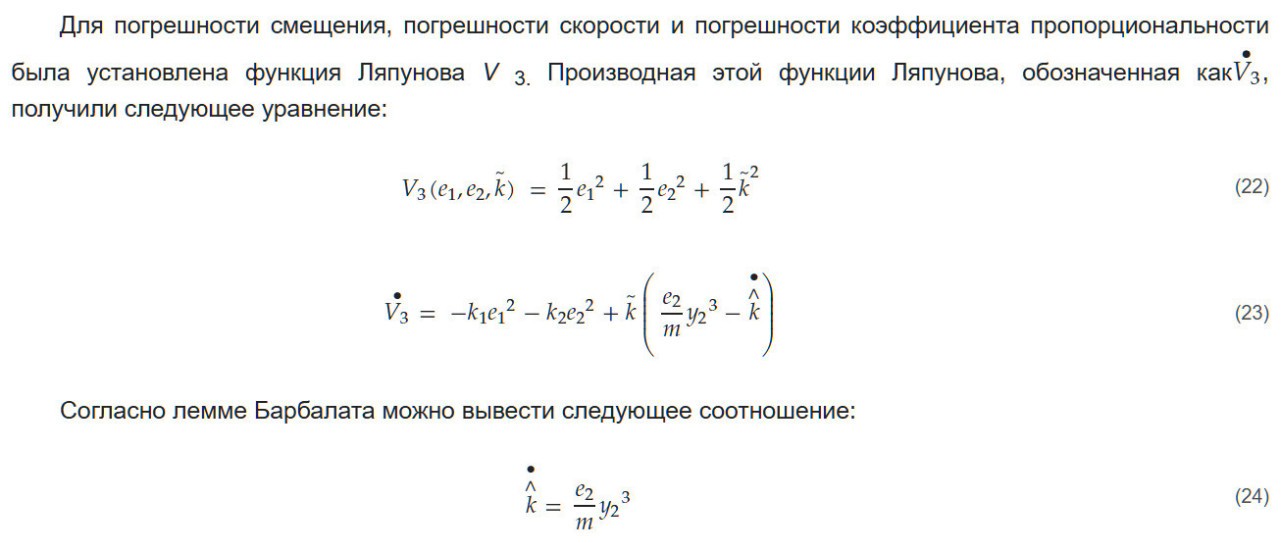
Лемма Барбалата обычно используется для неавтономных систем в нелинейных системах [40,41]. Предположим непрерывно дифференцируемую функцию f(t), когда t стремится к бесконечности, имеет конечное число предельных значений, и производная f(t) равномерно непрерывна. В этом случае производная f(t) стремится к нулю, когда t стремится к бесконечности.
PID является одним из наиболее используемых алгоритмов управления в системах автоматического управления, в котором пропорциональное управление Р выводит пропорциональное количество управления в соответствии с размером ошибки между контролируемой величиной и заданным значением. Увеличение пропорции может сократить время регулировки, но увеличит количество перерегулирования. Интегральное управление I выводит количество управления в соответствии с интегральным значением ошибки, которое может устранить статическую ошибку системы, но увеличит количество перерегулирования и время регулировки. Дифференциальное управление D выводит количество управления в соответствии с отрицательным значением скорости изменения ошибки, что может уменьшить количество перерегулирования и время регулировки, но увеличит дрожь системы для шума и других возмущений. Следующее уравнение может выразить принцип действия контроллера PID:

где U(t) обозначает количество управления, e(t) обозначает ошибку, Кр обозначает коэффициент пропорциональности, Ki обозначает коэффициент интеграции, и Kd обозначает коэффициент дифференциации.
Структура системы управления
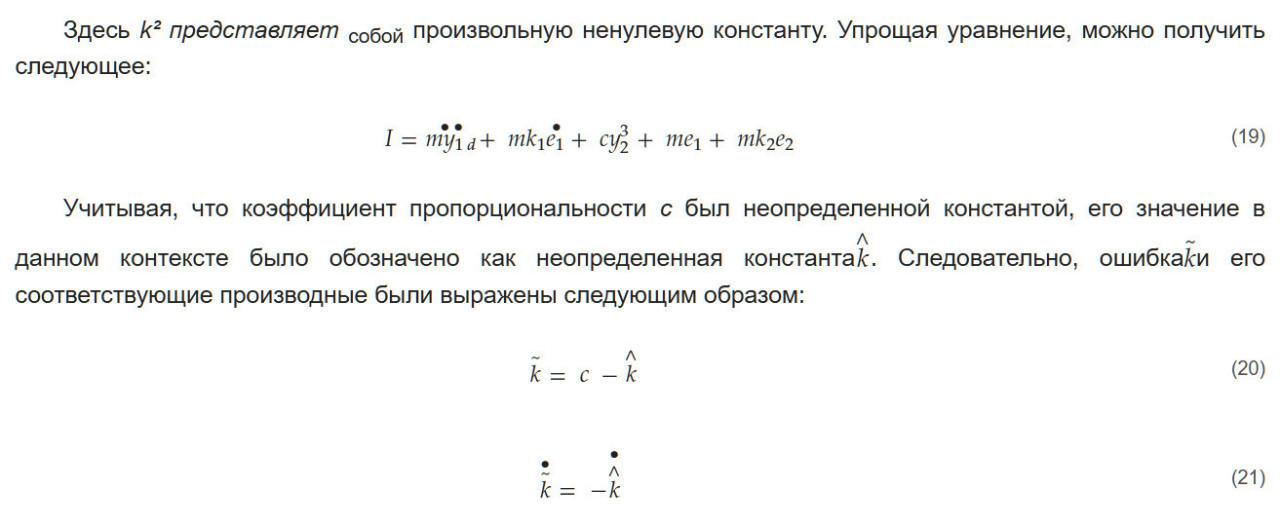
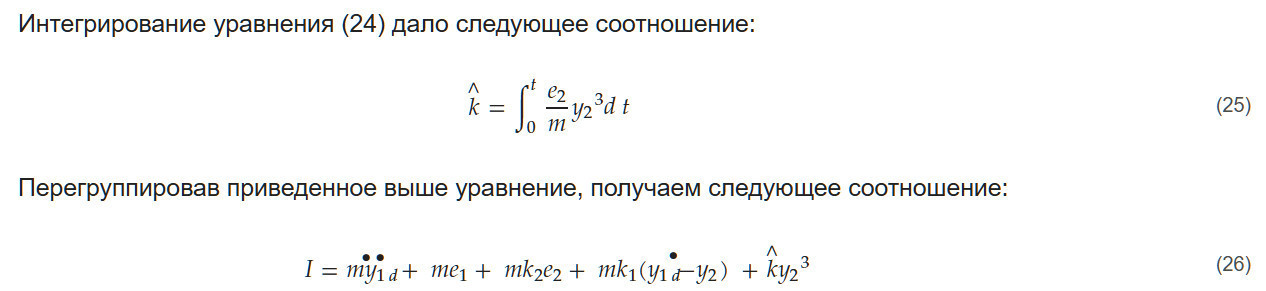
Эта статья моделировала устройство обнаружения глубины выкапывания следующим образом. Масса устройства была представлена m, входная приводная сила F была I, смещение у1 было у, и скорость у2 была у. Поскольку сила трения почвы на устройстве обнаружения является нелинейной силой, положительно коррелированной со скоростью у2 при обнаружении глубины выкапывания [42], для облегчения расчетов эта статья предположила, что сила трения f - су23, где с был коэффициентом масштаба. Согласно второму закону Ньютона, можно установить следующую математическую модель:

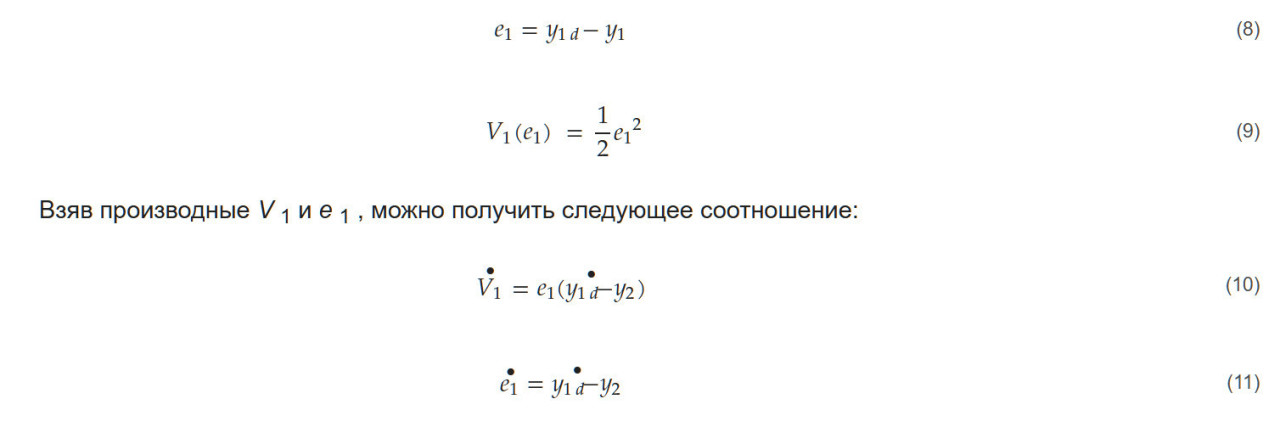
В данной статье предлагается использовать метод обратного шага в сочетании с ПИД-регулятором для разработки контроллера для системы регулирования глубины при выемке грунта. В следующем разделе представлено подробное описание этого процесса. Если предположить идеальный сценарий, в котором рабочее смещение механизма определения глубины обозначено какy 1d, ошибка смещения представлена какe 1, а для задания смещения задана функция ЛяпуноваV 1, то можно вывести следующее соотношение:
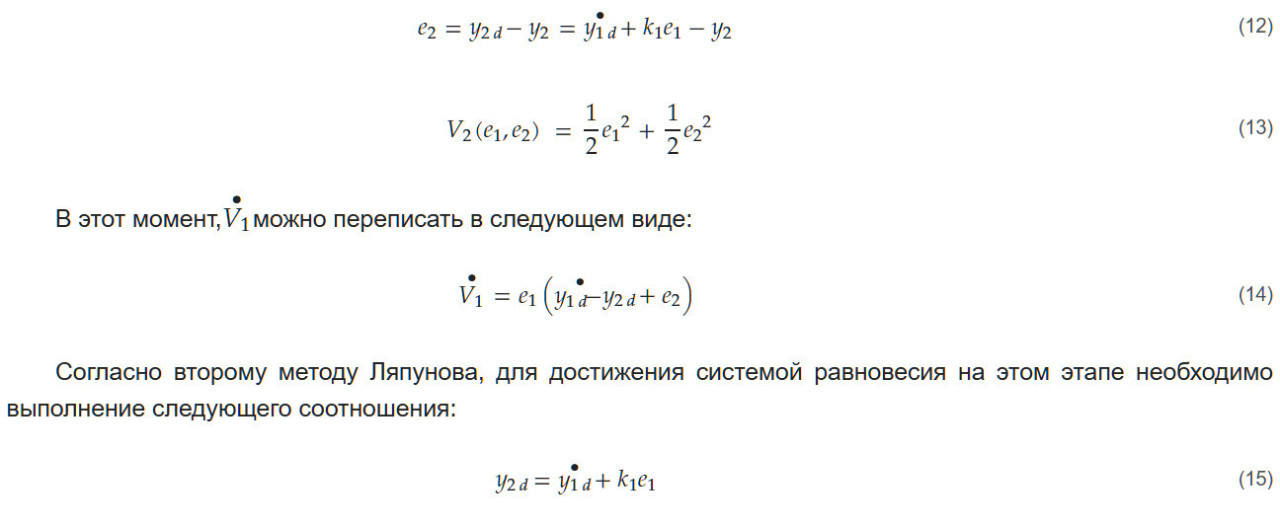
Предполагая, что в идеальном состоянии рабочая скорость устройства обнаружения глубины выкапывания обозначалась y2d, и ошибка скорости обозначалась е2, если функция Ляпунова V2 определялась для ошибки смещения и ошибки скорости, можно вывести следующие связи:
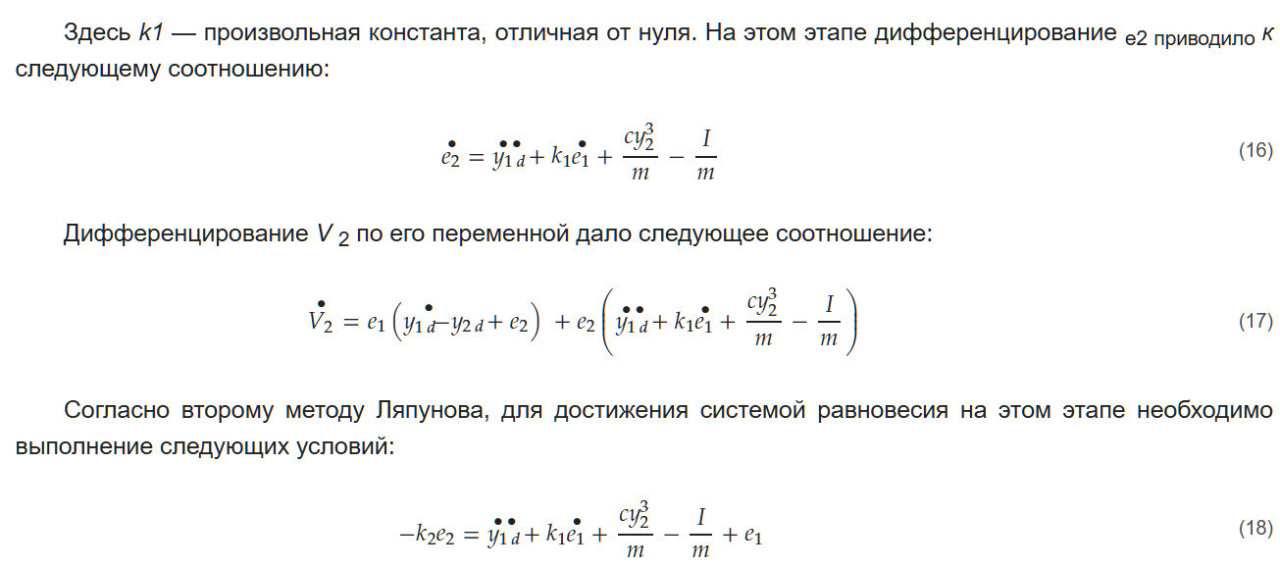
К этому моменту проектирование контроллера отслеживания траектории глубины копания было завершено. На рисунке 11 представлена построенная имитационная модель Simulink.
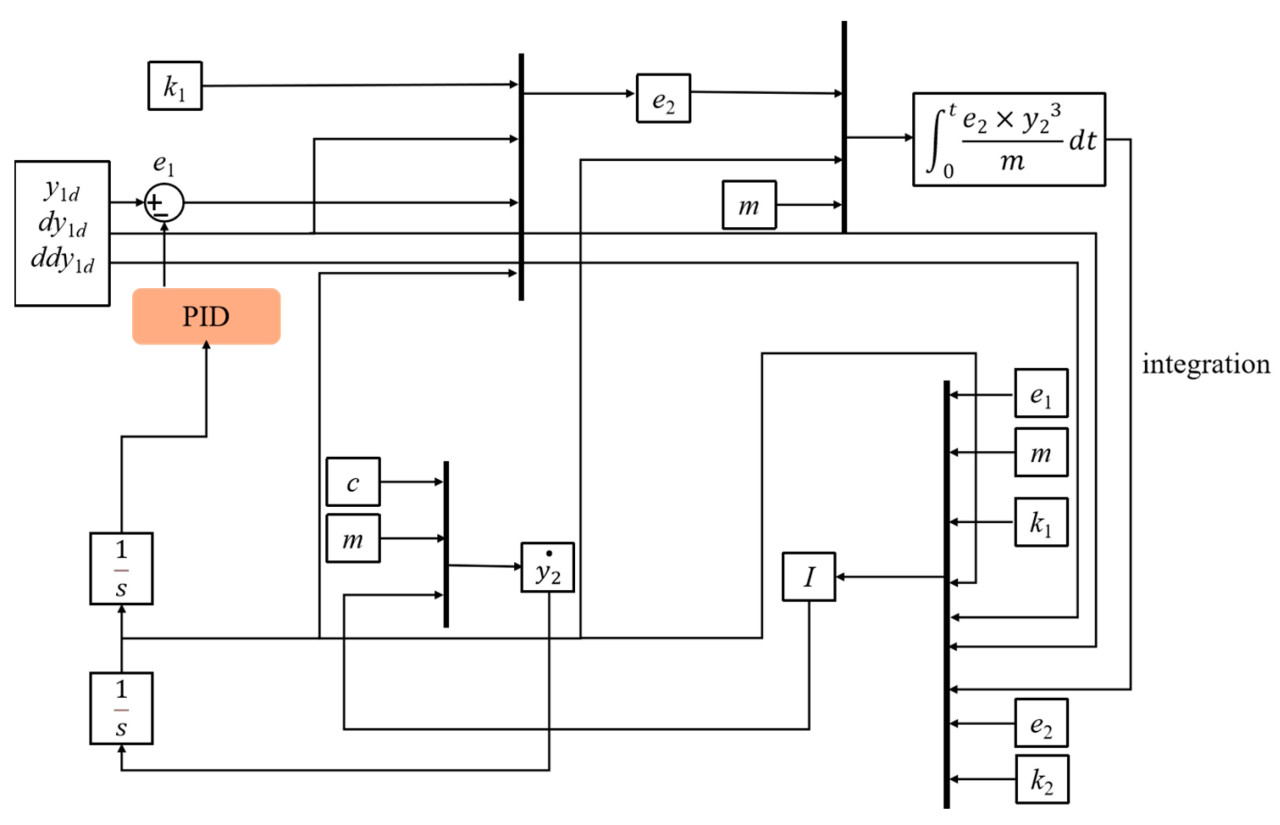
Рисунок 11. Модель Simulink.
Эксперимент симуляции
Эта секция проверяла эффективность предложенного метода. Учитывая высоко нелинейную подземную рабочую среду устройства глубины выкапывания, это исследование использовало модули Simulink в MATLAB 2017b для ввода синусоидальных и случайных смещений, позволяя сравнительный анализ предложенного контроллера B-PID и контроллера обратного шага без интеграции PID. Цель состояла в наблюдении отслеживания траектории обоих контроллеров для у1. Рисунки 12 и 13 представляют результаты симуляции.
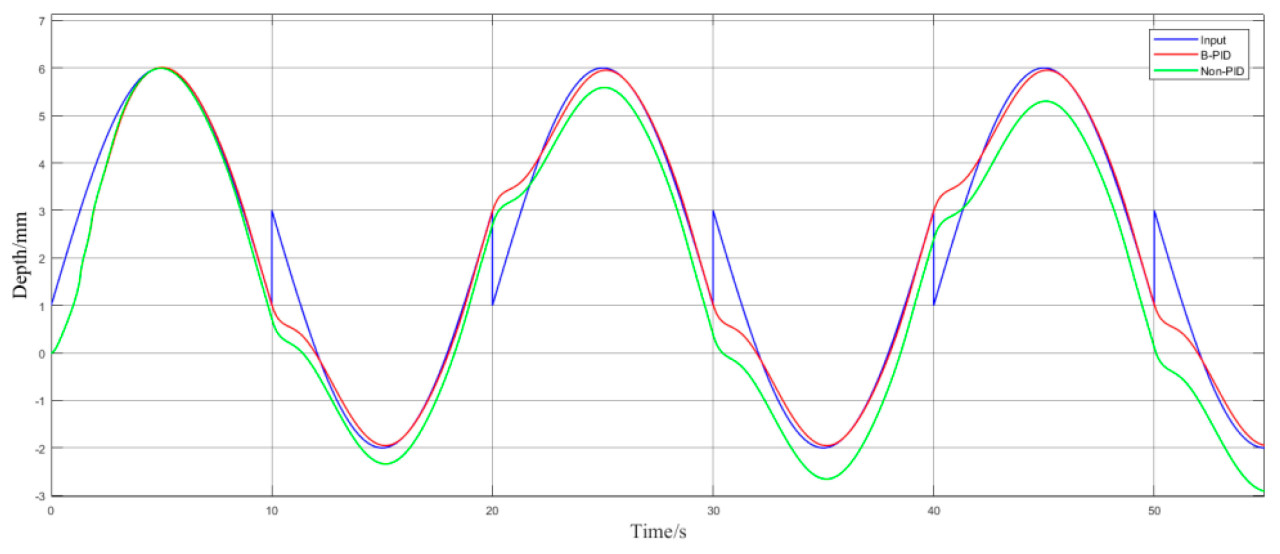
Рисунок 12. Результаты симуляции отслеживания синусоидальной кривой.
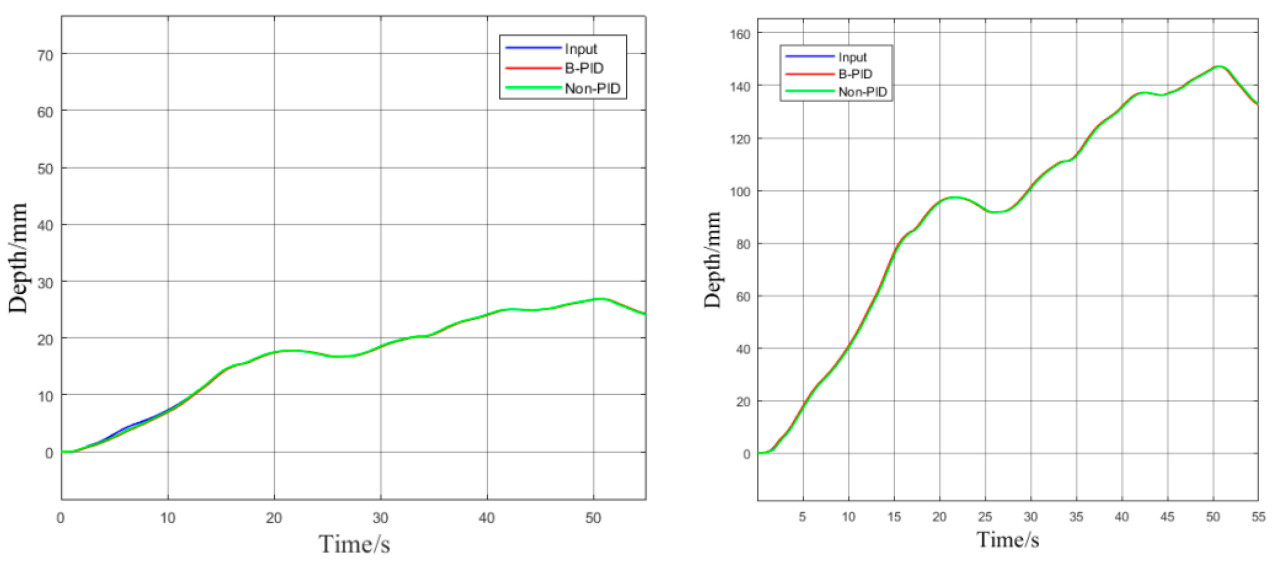
Рисунок 13. Результаты симуляции отслеживания случайно сгенерированных кривых.
Как показано на рисунке 12, для синусоидальной кривой движения контроллер B-PID демонстрировал превосходную устойчивость в точности отслеживания позиции по сравнению с контроллером обратного шага без интеграции PID. Его колебания были более стабильными во время изменений кривой. Напротив, Non-PID демонстрировал относительно менее стабильную производительность и достигал inferior аппроксимации синусоидальной траектории на протяжении всей экспериментальной фазы по сравнению с В-PID. Как показано на рисунке 13, как контроллер В-PID, так и контроллер обратного шага демонстрировали сильную устойчивость для траекторий, сгенерированных случайным белым шумом.
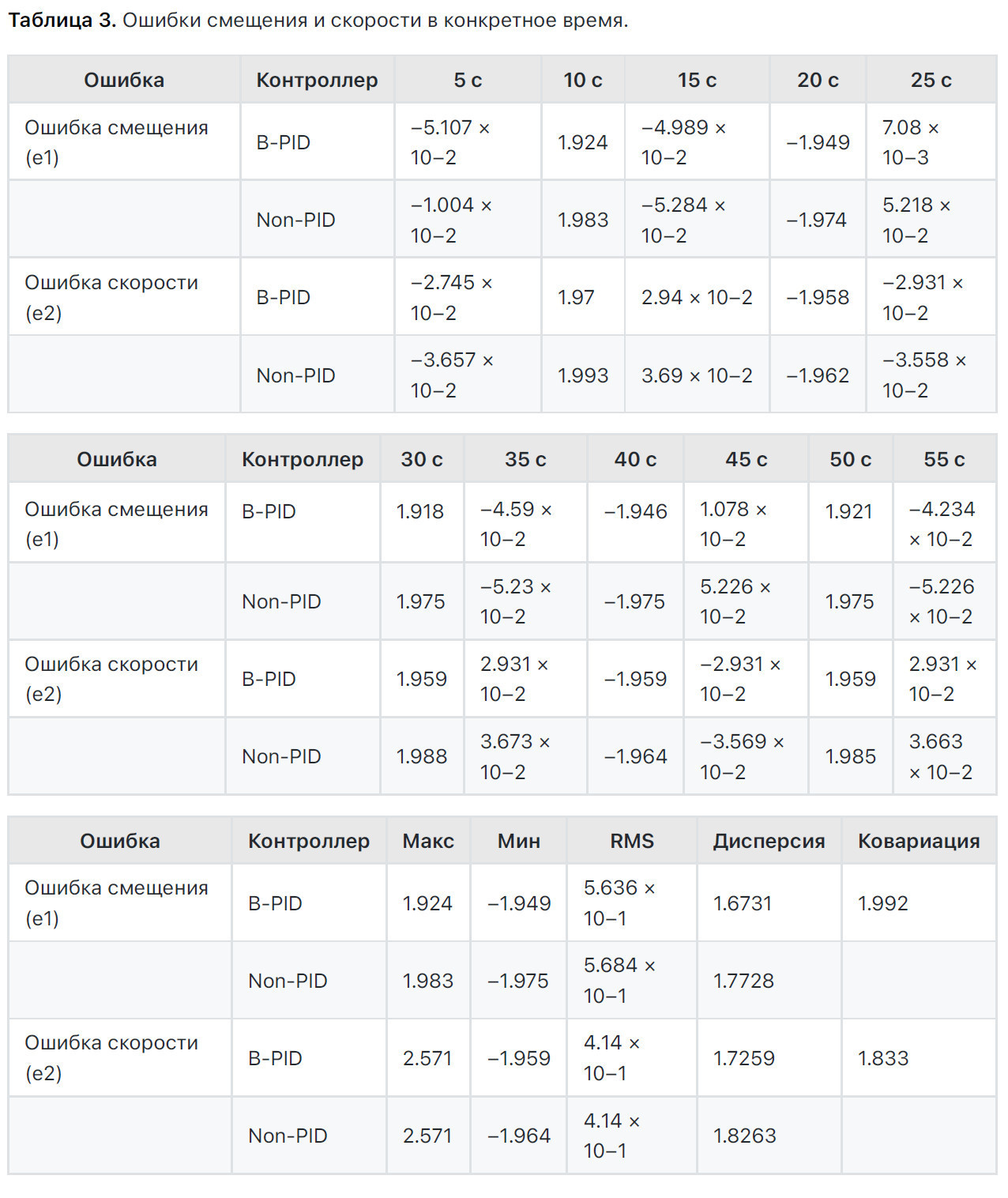
Чтобы дальше исследовать производительность контроллера, это исследование сравнило ошибку смещения (el) и ошибку скорости (е2), сгенерированные двумя контроллерами при отслеживании синусоидальной траектории, как иллюстрировано на рисунках 14 и 15.
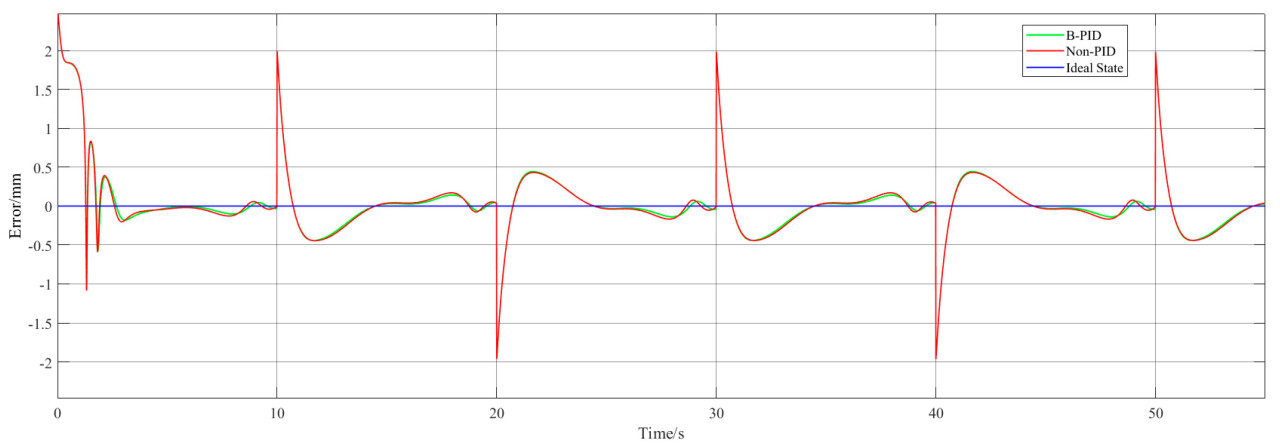
Рисунок 14. Результаты ошибки смещения (e 1).

Рисунок 15. Результаты погрешности скорости (e 2)
Анализ рисунков 14 и 15 и таблицы 3 показывает, что контроллер В-PID демонстрирует значительно меньшие ошибки смещения и скорости, с более низкими значениями среднеквадратичного (RMS) и дисперсии по сравнению с Non-PID. Это дальше подтверждает превосходную производительность В-PID. Кроме того, положительная ковариация между ошибками смещения и скорости для обоих контроллеров В-PID и Non-PID указывает на положительную корреляцию между этими двумя переменными.
Чтобы сравнить устойчивость контроллеров B-PID и Non-PID, это исследование включило ступенчатые возмущения в траекторию, сгенерированную случайным белым шумом. Результаты симуляции иллюстрированы на рисунке 16. Ошибки смещения иллюстрированы на рисунке 17.
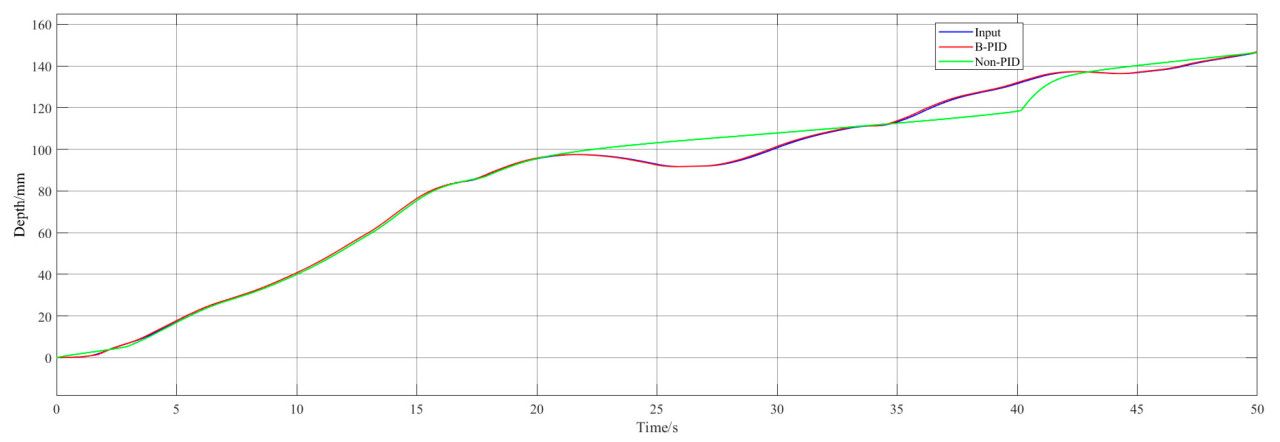
Рисунок 16. Результаты симуляции с добавленными возмущениями.
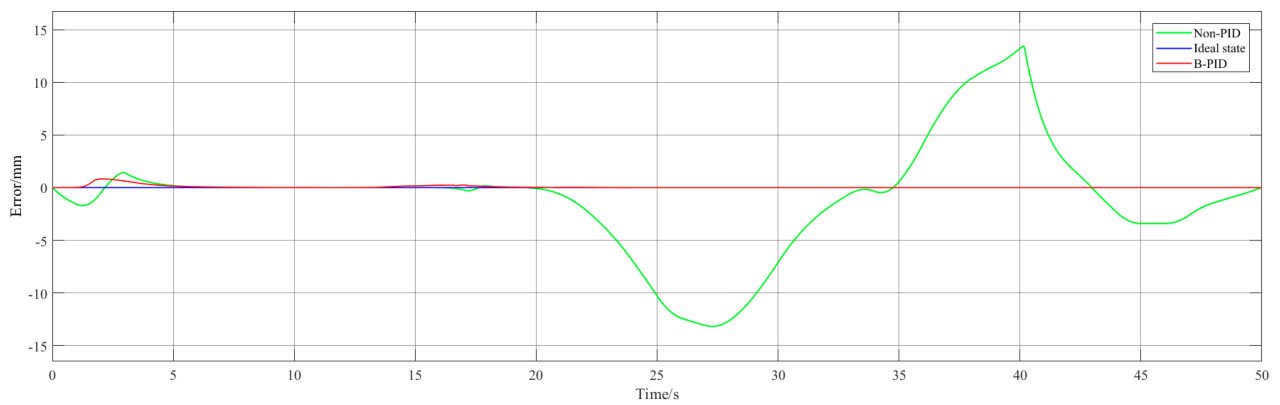
Рисунок 17. Ошибки смещения.
Анализ рисунков 16 и 17, а также таблицы 4, показывает, что под условием ступенчатых возмущений, введенных в систему, контроллер B-PID демонстрирует меньшую ошибку смещения. Кроме того, среднеквадратичное (RMS) ошибки смещения для контроллера B-PID, которое составляет 1,532 х 10-1, значительно ниже, чем для контроллера Non-PID, с значением RMS 5,707. Это указывает, что контроллер B-PID обладает превосходной устойчивостью по сравнению с контроллером Non-PID.

Целые результаты симуляции указывали, что по сравнению с другими контроллерами контроллер B-PID обладал значительными преимуществами в отслеживании траектории и устойчивости.
3. Эксперимент и анализ результатов
В мае 2023 г. практические тесты проводились в лаборатории производительности почвенного канала Школы механического и электротехнического машиностроения Университета Шихэцзы для оценки модулей контроля скорости шнека транспортирующего и сепарационного устройства, модуля обнаружения глубины выкапывания и модуля контроля частоты вибрации. Тестовые материалы, включая комплексы тигровый орех-корень-песок, получены из базы посадки тигрового ореха Второй компании, 54-го полка, Третьей дивизии Производственно-строительного корпуса Синьцзяна. Перед тестами почва в области теста почвенного канала выравнивалась и уплотнялась с использованием устройства выравнивания, устройства орошения и устройства уплотнения, которые являются частью установки почвенного канала. Материалы комплекса тигровый орех-корень-песок также были разложены в области теста почвенного канала в соответствии с паттерном посадки.
Экспериментальная аппаратура в первую очередь включает Тестовый автомобиль почвенного канала (ТСС-3.0), тахометр (testo 470), линейку, лопату и другие инструменты. Устройство, использованное в эксперименте, является самостоятельно построенной платформой транспортировки и сепарации для уборки тигрового ореха, как показано на рисунке 18. Электрическая проводка уборочного комбайна для тигрового ореха показана на рисунке 19.
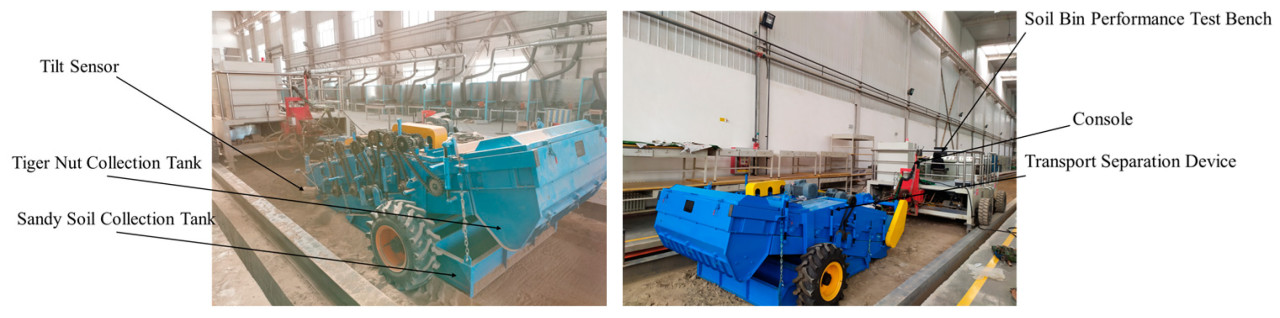
Рисунок 18. Платформа транспортировки и сепарации для уборки тигрового ореха.
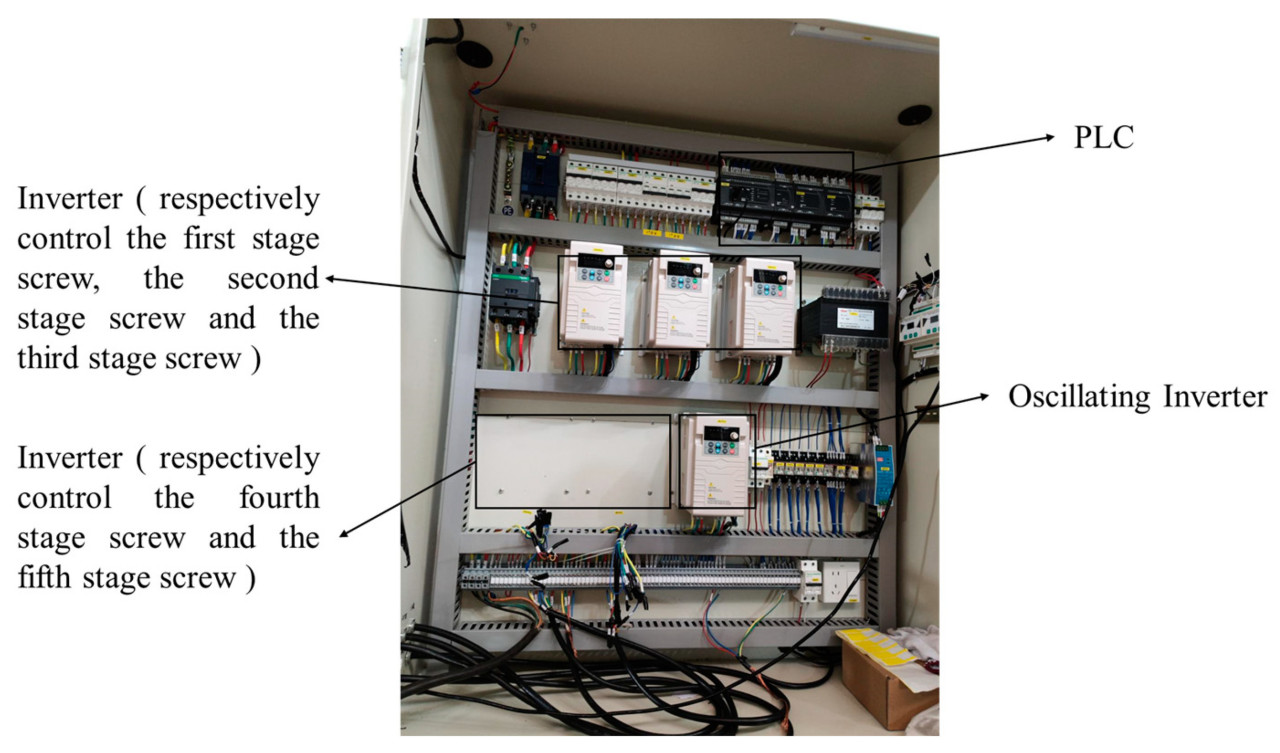
Рисунок 19. Электрическая проводка уборочного комбайна для тигрового ореха.
Платформа уборки, транспортировки и сепарации тигрового ореха использует многоступенчатый транспортирующий шнек в сочетании с системой вибрационного сита. Первая ступень транспортирующего шнека подается на смесь тигрового ореха, песка и других материалов, выкопанных устройством ротационного вспашки и выкапывания, характеризующаяся самой высокой массой транспортируемых материалов. Вторая ступень транспортирующего шнека обрабатывает смесь после того, как первая ступень шнека удалила некоторый песок. Третья ступень транспортирующего шнека в первую очередь обеспечивает транспортировку тигрового ореха, одновременно удаляя песок. В дизайне этой ступени должны быть учтены потенциальные повреждения тигрового ореха.
Учитывая, что трехступенчатые транспортирующие шнеки имеют разные объекты работы и функции, их скорости вращения спроектированы для постепенного уменьшения: первая ступень шнека имеет самую высокую скорость, вторая ступень шнека имеет следующую самую высокую скорость, а третья ступень шнека имеет самую низкую скорость. Четвертая и пятая ступени транспортирующего шнека в основном служат для удаления остаточного песка и завершения транспортировки тигрового ореха. Скорости вращения третьей, четвертой и пятой ступеней транспортирующего шнека установлены на последовательные.
Конкретные экспериментальные процедуры детализированы следующим образом: В интерфейсе управления работой шнека индивидуальные операции могут быть выполнены на скорости и частоте вибрации каждой ступени шнека. Интерфейс отображает крутящий момент и скорость вращения для каждой ступени шнека. Последовательность работы начинается с выбора поля отображения, соответствующего скорости шнека. Затем желаемая скорость вращения для каждой ступени шнека вводится вручную. При активации кнопки 'Запустить все', расположенной на интерфейсе, ступени шнека инициируются последовательно, прогрессируя от ступени 1 через ступень 5. Соотношения скоростей вращения между первой, второй и третьей ступенями транспортирующего шнека были установлены на 0,8, 0,9 и 1 соответственно. После нормальной работы оборудования скорости вращения шнека каждой ступени измерялись с использованием тахометра. Результаты показаны в таблице 5. Согласно таблице, когда соотношения скоростей шнека были 0,8, 0,9 и 1, относительные ошибки между теоретическими и измеренными значениями составляли 3,80%, 1,76% и 2,49% соответственно. Все относительные ошибки ниже 5%, удовлетворяя требованиям.

Таблица 5. Результаты испытаний производительности шнека при различных соотношениях скоростей вращения.
Конкретные процедуры для этого эксперимента следующие. Перед началом эксперимента требуется нулевая калибровка. Нулевое значение для глубины выкапывания обозначается как Ю. Первоначально значение нулевой точки входа в почву может быть временно установлено на 0.
Затем длина тестовой штанги входа в почву определяется как совокупная длина тестовой штанги входа в почву и ролика; это обозначается как I для вычислительного удобства. С аппаратурой, расположенной на ровной плоскости, когда лезвия ротационного вспашки находятся в начальном контакте с поверхностью земли, значение вспашки глубины будет записано как li. Нулевое значение 10 затем определяется через уравнение 10 = I - li, и это рассчитанное значение впоследствии вводится в поле установки нулевой точки входа в почву. По завершении этой процедуры обнуления прямые чтения значений глубины вспашки могут быть получены.
Во время процесса тестирования регулировки глубины выкапывания производились на интерфейсе HMI путем ввода значений 129 мм, 127 мм, 125 мм, 123 мм и 121 мм соответственно. Пять тестовых точек были выбраны в тестовой области, и глубина выкапывания измерялась с использованием линейки в каждой точке. Каждое измерение повторялось трижды, и записывалось арифметическое среднее. Полученные данные представлены в таблице 6. Как указано в таблице, относительные ошибки в пяти тестовых точках составляли 0,4%, 0,3%, 1,5%, 1,4% и 0,9%, с максимальной относительной ошибкой 1,5%, которая удовлетворяет требованиям. Кроме того, был создан график рассеяния с теоретическими значениями глубины выкапывания на оси х и измеренными значениями на оси у, и математическая кривая аппроксимации отношения была подогнана к точкам данных, что можно увидеть на рисунке 20. Полученная математическая связь между теоретическими и измеренными значениями — у - 1,115х - 15,555, с значением R2 0,9768, указывающим на надежность модели корректировки.

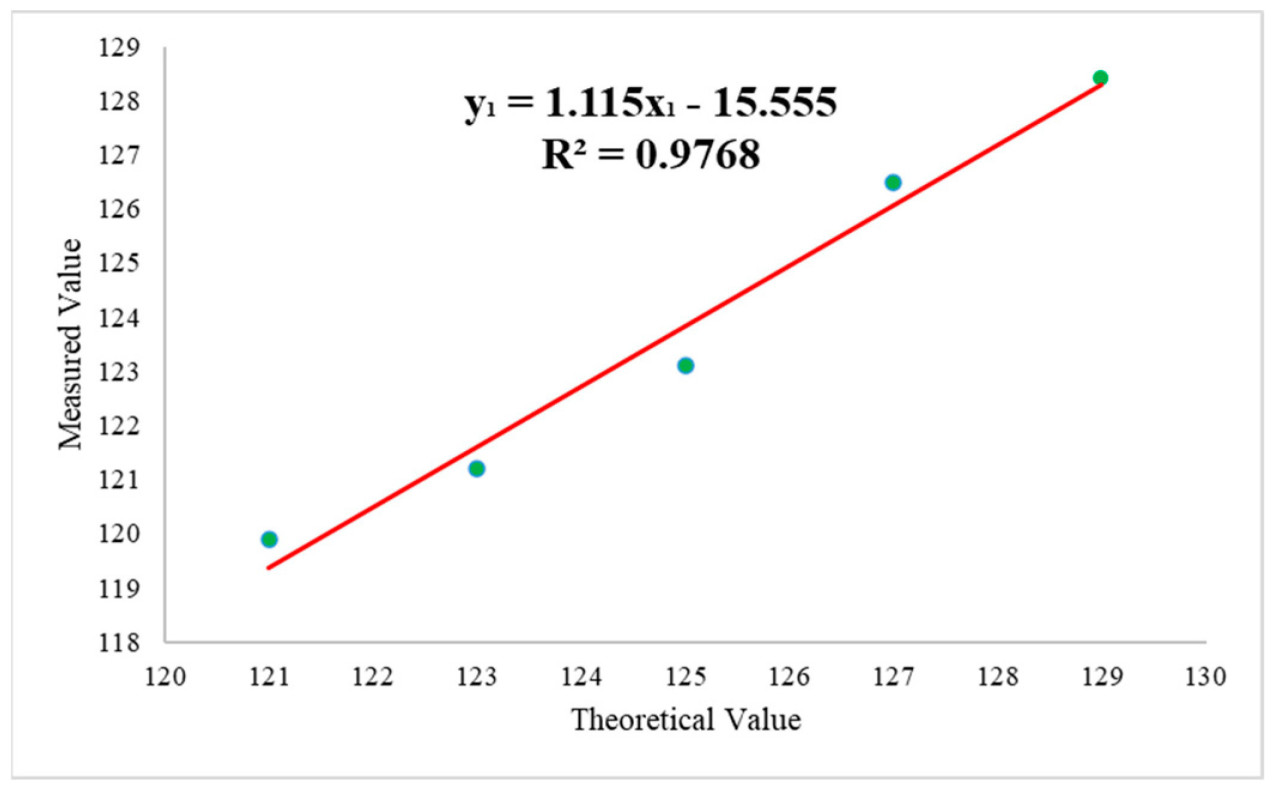
Рисунок 20. Подогнанная кривая представляет корреляцию между фактической и теоретической глубиной выкапывания.
Вращательная скорость приводного двигателя возбудителя регулировалась таким образом, что возбудительный кулачок достиг вращательных скоростей 126 об/мин, 108 об/мин,105 об/мин, 120 об/мин и 135 об/мин. Подставляя скорость шнека в формулу расчета собственной частоты f - п/60, можно определить, что частоты возбуждения составляют 8,4 Гц, 7,2 Гц, 7 Гц, 8 Гц и 9 Гц соответственно. Используя высокоскоростную камеру (TS4100LR3C8512), процесс возбуждения возбудительного кулачка на переднем и заднем ситах был записан. Движение переднего и заднего сит анализировалось с использованием программного обеспечения динамического анализа высокоскоростного видео Xcitex ProAnalyst (2023), получая количество вибраций в минуту, т.е. частоту возбуждения, что можно увидеть на рисунке 21. Каждый эксперимент проводился в трех экземплярах, и впоследствии рассчитывалось среднее значение. Поскольку структура возбудителя состоит из четырех дуговых кулачков, частоты возбуждения переднего и заднего сит последовательны. Экспериментальные результаты в таблице 7 показывают, что относительные ошибки в пяти тестовых точках составляют 1,19%, 2,78%, 1,57%, 0,75% и 3,67%, с максимальной относительной ошибкой 3,67%, ниже 5%, удовлетворяя требованиям.
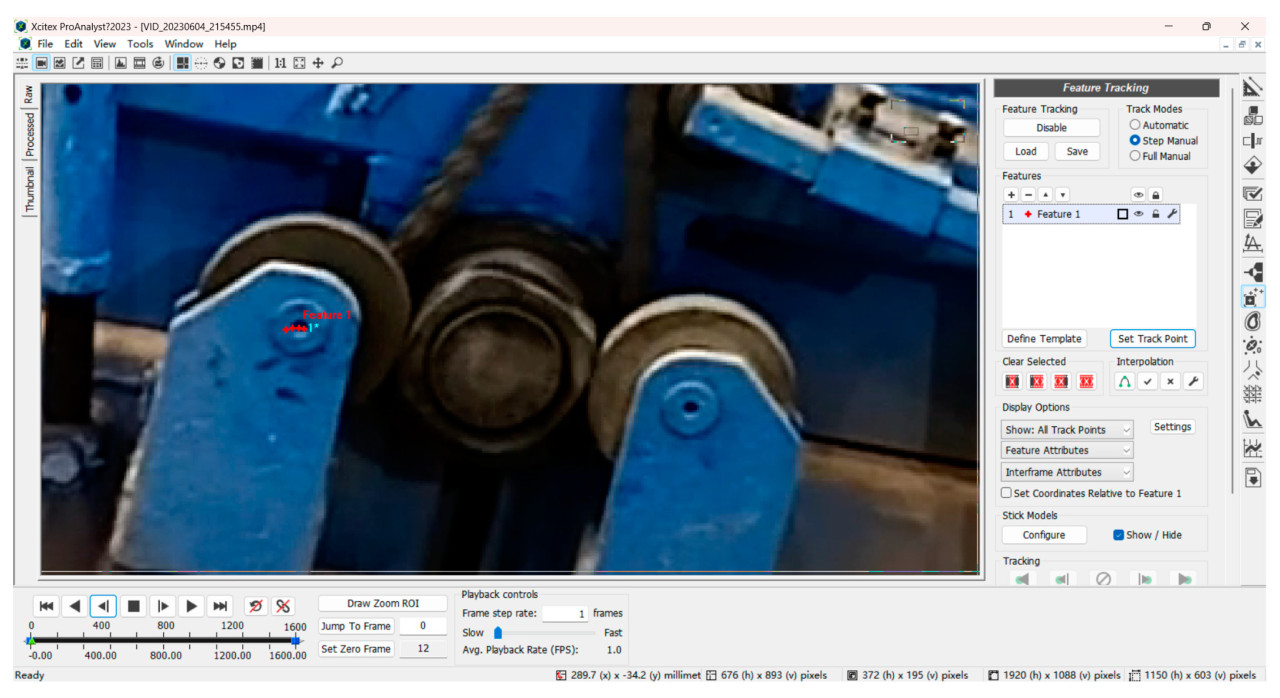

Таблица 7. Результаты испытаний частоты возбуждения.
Кроме того, теоретические значения частоты возбуждения брались как ось х, а измеренные значения как ось у. График рассеяния, сформированный этими значениями, подвергался подгонке кривой математического отношения, что можно увидеть на рисунке 22. Математическая связь между теоретическими и измеренными значениями после подгонки дается уравнением у - 0,9408х + 0,3092, с значением R2 0,9852, указывающим на надежность модели корректировки.
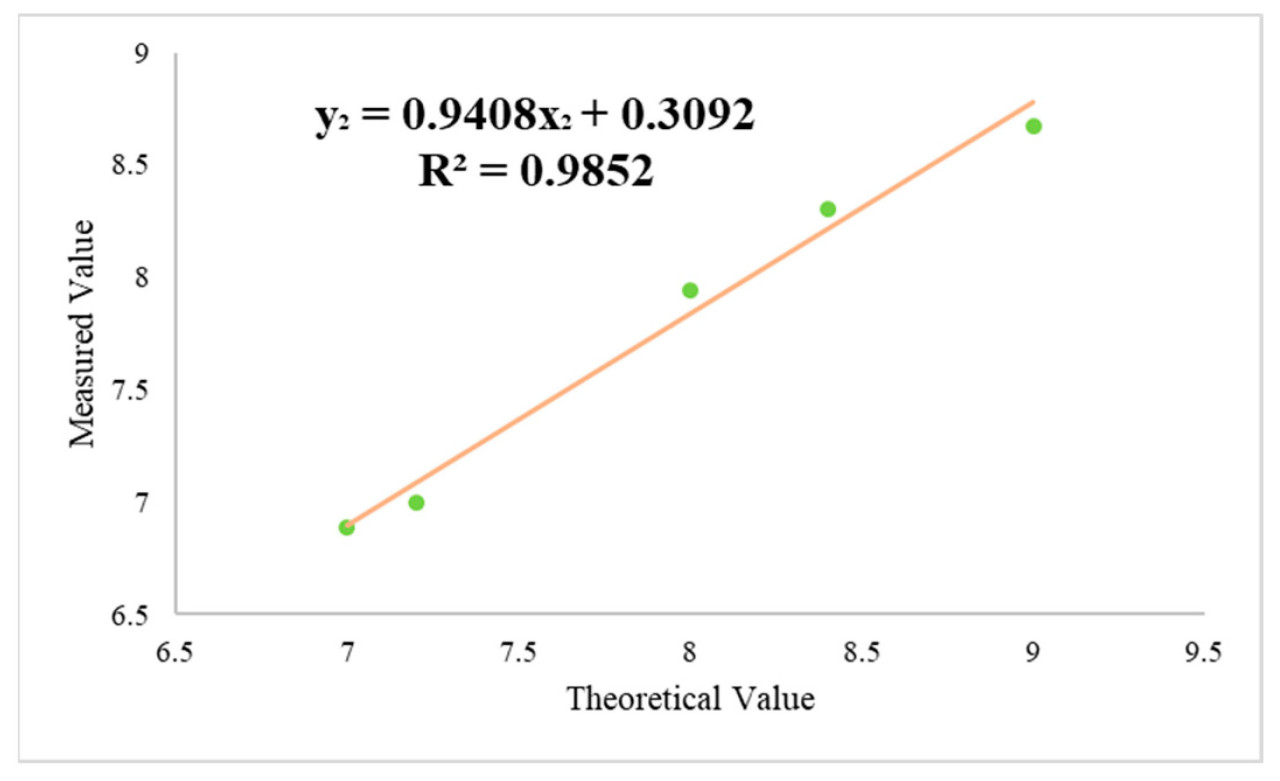
Рисунок 22. Подогнанная кривая представляет корреляцию между фактической и теоретической частотой возбуждения.
4. Выводы
(1) Была разработана визуализированная платформа управления для решения проблемы низкой эффективности уборки тигрового ореха в песчаных регионах Синьцзяна, возникающей из-за несоответствия между скоростью подачи выкапывания и скоростью транспортировки-сепарации. Эта платформа, включающая контроль скорости шнека, крутящего момента, частоты вибрации и глубины выкапывания, интегрирует механические исполнительные компоненты и систему автоматического управления, тем самым способствуя интеллектуализации оборудования для уборки тигрового ореха;
(2) Был предложен адаптивный контроллер, интегрирующий обратный шаг и PID (B-PID), для улучшения отслеживания траектории и обнаружения глубины во время уборки тигрового ореха. Была разработана всесторонняя модель управления, учитывающая демпфирование движения и компенсацию ошибки смещения. Оценка производительности через симуляции Simulink сравнила контроллер В-PID с альтернативными стратегиями управления. Результаты из этих экспериментов демонстрируют, что модель В-PID значительно улучшает отслеживание траектории, предлагая эффективное управление для обнаружения глубины выкапывания;
(3) Эксперименты по тестированию модулей были проведены на платформе транспортировки и сепарации уборки тигрового ореха. Экспериментальные результаты показывают, что в тесте скорости шнека, когда соотношение скоростей шнека составляет 0,8, 0,9 и 1, относительные ошибки между теоретическими и измеренными значениями составляют 3,80%, 1,76% и 2,49% соответственно; в тесте глубины выкапывания относительные ошибки в пяти тестовых точках составляют 0,4%, 0,3%, 1,5%, 1,4% и 0,9%, с максимальной относительной ошибкой 1,5%; в тесте частоты вибрации относительные ошибки в пяти тестовых точках составляют 1,19%, 2,78%, 1,57%, 0,75% и 3,67%, с максимальной относительной ошибкой 3,67%. На основе этих результатов были установлены модели корректировки для контроля параметров глубины выкапывания и частоты вибрации.
Вклад авторов: Концептуализация, Ц.Ц. и С.Ч.; методология, Ц.Ц., Ц.Г., С.Ч. и Ц.Ф.; исследование, Ц.Ц. и Ц.Г.; курирование данных, Ц.Ц. и Ц.Г.; формальный анализ, Ц.Ц., Ц.Г. и В.Ч.; написание оригинального черновика, Ц.Ц.; написание-обзор и редактирование, Ц.Ц., С.Ч., Ц.Г., В.Ч., Х.М. и
Ч.М.; администрирование проекта, Ц.Ц.; приобретение финансирования, Ц.Ц., Х.М. и Ч.М. Все авторы прочитали и согласились с опубликованной версией рукописи.
Финансирование: Это исследование финансировалось Открытым фондом проекта Ключевой лаборатории сельскохозяйственного оборудования и интеллектуальных высоких технологий провинции Цзянсу, номер гранта МАЕТ202313, Проектом плана науки и технологий Корпуса, номер гранта 2024DB016, и Проектом исследования науки и технологий Университета Шихэцзы, номер гранта KJGG202404.
Заявление институционального комитета по обзору: Не применимо.
Заявление о доступности данных: Данные, представленные в этом исследовании, доступны по запросу от соответствующего автора.
Благодарности: Авторы хотели бы поблагодарить Инженерный исследовательский центр по механизации производства специальных экономических культур оазиса, Министерство образования, Школа сельскохозяйственного машиностроения, Университет Цзянсу и Ключевую лабораторию современного сельскохозяйственного оборудования и технологий, Университет Цзянсу, Министерство образования, за поддержку.
Конфликты интересов: Авторы заявляют об отсутствии конфликтов интересов.
Ссылки
1. Сан, Р.; Чжун, П.; Лю, З.Д.; Гао, Х.Ц.; Ван, Р.Д.; Ли, В.; Ю, X.; Сонг, Х.Й.; Ван, Х.Л. Прогресс исследований устойчивости тигрового ореха к абиотическим стрессам. Feed. Feed 2023, 5, 32- 35.
2. Ван, Р.Й.; Ван, Х.С.; Сян, X. Многоцелевая новая масличная культура — Тигровые орехи. China Oils Fats 2019, 44, 1-4.
3. Чжао, Х.Ц.; Лю, X.; Л у, Ч.Й.; Чэн, Й.Ц.; Чжан, Д.Ц.; Бай, Ф.Ф.; Фанг, Ц.; Рен, Й.Ф. Технология выращивания ветрозащитных и пескофиксационных тигровых орехов на деградированных землях. Mod. Agric. 2019, 6,12-13.
4. Дин, Л.; Гуо, Х.Ц.; Ван, В.Ч.; Л в, Ч.Ц.; Лв, Й.Л.; Чжан, Р.К. Дизайн и эксперимент устройства дозирования с низким расположением отверстий для гнезд для Cyperus esculentus. Trans. Chin. Soc. Agric. Mach. 2022, 53, 86-97. [CrossRef]
5. Ян, Х.Д.; Ли, Ч.Й. Индустрия тигрового ореха в Китае: Текущее состояние развития, потенциали адаптивные предложения. Chin. J. Oil Crop Sci. 2022, 44, 712-717.
6. Ди, Ч.Ф.; Ли, Ц.Л.; Цзян, В.; Чжан, Ч.Ц.; Чжан, X.; Ли, Н.; Чжай, Ч.К.; Чжоу, Ц. Прогресс исследований и перспективы технологии и оборудования посадки и уборки тигрового ореха. J. Shanxi Agric. Univ. (Nat. Sci. Ed.) 2022, 42, 96-106.
7. Чжао, Ч.; Хэ, X.H.; Ван, Д.В.; Шан, С.Ц.; Сюй, Н.; Чжу, X.; Чжэн, Х.С. Дизайн и тест промежуточного транспортирующего устройства для комбайна Cyperus esculentus. J. Agric. Meeh. Res. 2023, 45, 172-176.
8. Хэ, X.; Лв, Й.; Цю, Ч.; Ван, В.; Чжоу, Ч.; Хэ, X. Оптимизация параметров и тест устройства подъема самоходного комбайна для тигрового ореха с гусеничным ходом. Agriculture 2022,12, 1060. [CrossRef]
9. Лв, Ч.; Ван, В.; Ян, Д.; Хэ, X.; Цю, Ч.; Цзин, В.; Мэй, Й.; Хуан, X.; Су, Б.; Чжуан, Й. Оптимальный дизайн и тесты пульсирующего устройства очистки роликов для тигровых орехов. Agriculture 2024, 14, 1673. [CrossRef]
10. Пэй, М.; Ан, С.; Чэнь, С.; Ци, Ц.; Ли, Й. Анализ и эксперименты процесса дробления и сепарации корнево-песчаного комплекса выкопанного и извлеченного Cyperus esculentus L. в пустынях. Eng. Agricola 2023, 43, е20220121. [CrossRef]
11. Лю, Ц.; Чжао, С.; Ли, Н.; Фахим, М.; Ли, П. Разработка и полевые тесты автономного трансплантатора для рассады клубники для использования в повышенном выращивании. Appl. Eng. Agric. 2019, 35, 1067-1078. [CrossRef]
12. Цзи, X.; Вэй, X.; Ван, А.; Цуй, Б.; Сонг, Ц. Новый композитный адаптивный контроллер скользящего режима терминального для бокового отслеживания пути сельскохозяйственных транспортных средств. Nonlinear Dyn. 2022,110, 2415-2428. [CrossRef]
13. Сонг, Ч.; Ду, Ц.; Чэнь, Й.; Хан, Д.; Ван, X. Разработка и тест заголовка для сбора горячего перца типа пружинно-пальцевого роликового типа. J. Agric. Eng. 2024, 55. [CrossRef]
14. Ду, Ц.; Фанг, В.; Хан, Д.; Чэнь, X.; Ван, X. Дизайн и экспериментальное исследование биомиметического барабана для сбора перца стручкового типа на основе много-пальцевого сотрудничества. Agriculture 2024,14, 314. [CrossRef]
15. Ду, Ц.; Хан, Д.; Сонг, Ч.; Чэнь, Й.; Ван, X. Калибровка контактных параметров для сложных форм плодов на основе метода дискретных элементов: Случай стручкового перца (Capsicum annuum). Biosyst. Eng. 2023, 226, 43-54. [CrossRef]
16. Чэн, П.Ф. Исследование интеллектуального управления и оптимизации параметров оборудования для очистки картофеля. Мастерская диссертация, Университет технологий Шаньдуна, Цзыбо, Китай, 2017.
17. Лоу, X.; Ли, М.; Ду, Й.; Мао, Э.; Фу, Л. Дизайн и эксперимент системы управления очисткой для комбайна совместной уборки кукурузы. Chin. J. Agric. Mach. Chem. 2024, 45,1-8.
18. Вэй, Д.Х. Исследование и дизайн системы онлайн-мониторинга потерь при очистке уборочного комбайна для зерен кукурузы. Мастерская диссертация, Китайская академия сельскохозяйственных наук, Пекин, Китай, 2023.
19. Мирзазаде, А.; Абдоллахпур, С.; Хакимзаде, М. Оптимизированная математическая модель системы очистки зерна, функционирующей в комбайне, с использованием методологии поверхности отклика. Acta Technol. Agric. 2022, 25, 20-26. [CrossRef]
20. Чэнь, Ч.В. Исследование системы измерения и управления испытательного стенда сепарации и очистки Cyperus esculentus. Мастерская диссертация, Сельскохозяйственный университет Цзилиня, Чанчунь, Китай, 2022.
21. Шангуань, Ч.Ц. Разработка системы мониторинга и управления комбайном для кукурузы на основе STM32. Мастерская диссертация, Университет Цзинань, Цзинань, Китай, 2023.
22. Ци, Ц.; Гао, Ц.; Чэнь, Х.К.Ч. Оптимизация параметров транспортирующего и сепарационного устройства на основе пятиступенчатого шнека и вибрационного сита для уборочных комбайнов тигрового ореха. Agriculture 2024,14, 682. [CrossRef]
23. Франсуа, М.; Осиурак, Ф.; Форт, А.; Крэйв, П.; Наварро, Ц. Дизайн автомобильного HMI и участие пользователя: Обзор и перспективы. Ergonomics 2016, 60, 541-552. [CrossRef]
24. Обейдат, М.С.; Рабаба, М.М.; Тайфур, В.Р. Влияние устройств интерфейса человека-машины автомобиля на отвлечения от вождения. Theor. Issues Ergon. Sci. 2021, 23, 414-434. [CrossRef]
25. Джордан, H.; Луис, X.; Евгения, А.; Жюльен, Ц. Влияние взаимодействий человека-машины и требований задачи на выбор и использование автоматизации. Ergonomics 2018, 61,1601-1612.
26. Мелладо, Ц.; Нуньес, Ф. Дизайн 1оТ-ПЛК: Контейнеризованный программируемый логический контроллер для индустрии 4.0. J. Ind. Inf. Integr. 2021, 25,100250. [CrossRef]
27. Иоаннидес, М.Г. Дизайн и реализация системы мониторинга на основе ПЛК для асинхронного двигателя. IEEE Trans. Energy Convers. 2004,19, 469-476. [CrossRef]
28. By, C.X.; Ли, Ц.С. Исследование выбора ПЛК в дизайне базовой системы управления автоматизацией. Town Water Supply 2022, 7, 59-65.
29. Юлин, Д.; Чуньцзяо, Ч. Дизайн и исследование встроенной системы разработки ПЛК. В материалах 3-й Международной конференции по исследованиям и развитию компьютеров 2011 г., Шанхай, Китай, 11-13 марта 2011 г.
30. Гуо, Л.; Песен, Р. Проекты дизайна в курсе программируемого логического контроллера (ПЛК) в технологии электротехники. Technol. Interface J. 2009,10,1-9.
31. Чэн, Й.Ф. Оптимизация структурного дизайна и модальный анализ линейного вибрационного сита. Мастерская диссертация, Университет Тайюаня технологий, Тайюань, Китай, 2014.
32. Хоу, Ц.М.; Рен, Ч.Т.; Чжу, Х.Ц. Дизайн и тест устройства двойного слоя наклонной вибрационной воздушной очистки для касторового масла. Trans. Chin. Soc. Agric. Mach. 2022, 53, 39-51.
33. Чжэн, X.C.; Шан, С.Ц.; Ван, Д.В.; Ли, Ц.П.; Ли, М.Х.; Шэнь, С.Л.; Чжао, Ч.Л.; Хэ, Х.Н. Анализ дизайна и тест устройства очистки типа воздух-сито для масла седжа. J. Agric. Meeh. Res. 2024, 159, 146-153.
34. Цзэн, Ц. Исследование вибрационного сита, приводимого в движение эксцентриковым кулачком. Мастерская диссертация, Юго-западный нефтяной университет, Чэнду, Китай, 2019.
35. Сюй, Т.Х. Сравнительное исследование эффективности параметров вибрационного просеивания на основе EDEM. South. Agric. Mach. 2024, 55,166-168.
36. Цзинь, Т.Ц. Разработка испытательного стенда механизированной уборки картофеля с вибрационной сепарацией почвы. Мастерская диссертация, Сельскохозяйственный университет Шэньяна, Шэньян, Китай, 2023.
38. Нгуен, H.T. Теория устойчивости Ляпунова. В Model-Reference Adaptive Control. Advanced Textbooks in Control and Signal Processing; Springer: Чам, Швейцария, 2018; стр. 47-81. [CrossRef]
39. Шевитц, Д.; Паден, Б. Теория устойчивости Ляпунова несглаженных систем. IEEE Trans. Autom. Control 1994, 39, 1910-1914.
40. By, Ч.; Ся, Й.; Се, X. Стохастическая лемма Барбалата и ее применения. IEEE Trans. Autom. Control 2012, 57, 1537-1543. [CrossRef]
42. Ламарк, Ц.Х.; Бернардин, Ф.; Бастиен, Ц. Исследование реологической модели с термином трения и кубическим термином: Детерминистические и стохастические случаи. Ей г. J. Meeh. 2005, 24, 572-592. [CrossRef]
Research on the Control System for the Conveying and Separation Experimental Platform of Tiger Nut Harvester Based on Sensing Technology and Control Algorithms
by Sirui Chen 1, Jiangtao Qi 1,*, Jianping Gao 1, Wenhui Chen 1, Jiaming Fei 1, Hewei Meng 1 and Zhen Ma 2,3,*
1 College of Mechanical and Electrical Engineering, Shihezi University, Shihezi 832000, China
2 School of Agricultural Engineering, Jiangsu University, Zhenjiang 212013, China
3 Key Laboratory of Modern Agriculture Equipment and Technology, Jiangsu University, Ministry of Education, Zhenjiang 212013, China
* Authors to whom correspondence should be addressed.
Перевод статьи «Research on the Control System for the Conveying and Separation Experimental Platform of Tiger Nut Harvester Based on Sensing Technology and Control Algorithms» авторов Sirui Chen, Jiangtao Qi, Jianping Gao, Wenhui Chen, Jiaming Fei, Hewei Meng, Zhen Ma, оригинал доступен по ссылке. Лицензия: CC BY. Изменения: переведено на русский язык

















































































































Комментарии (0)