Проектирование и оценка производительности самоходного комбайна для уборки полыни в холмистых и горных районах
Полынь серебристая или китайская (Artemisia argyi) – многолетнее травянистое растение семейства Астровых, широко культивируется по всему Китаю благодаря своей значительной экономической и лекарственной ценности. Это делает эффективную уборку критически важной для экономической производительности отрасли. Однако отсутствие специализированной уборочной техники для холмистых и горных регионов приводит к зависимости от ручных операций, характеризующихся высокой трудоемкостью и низкой эффективностью. Для решения этих проблем разработана самоходная уборочная машина на основе схем посадки полыни и физических характеристик полыни в период уборки.
Аннотация
В Китае имеются обширные площади культивирования полыни серебристой или китайской (Artemisia argyi), что делает эффективную уборку критически важной для экономической производительности отрасли. Однако отсутствие специализированной уборочной техники для холмистых и горных регионов приводит к зависимости от ручных операций, характеризующихся высокой трудоемкостью и низкой эффективностью. Для решения этих проблем разработана самоходная уборочная машина для уборки полыни на основе схем посадки полыни и физических характеристик полыни в период уборки. Разработаны ключевые структурные компоненты, такие как размеры барабана, формы зубьев и расположение зубцов, и установлена модель силы удаления листьев для определения факторов, влияющих на чистую скорость уборки листьев полыни, содержание примесей и пригодность листьев полыни. Уборочная машина использует полностью гидравлическую систему привода, для которой спроектирована гидравлическая система и выбраны компоненты. Квадратичный регрессионный ортогональный ротационный тест определяет оптимальные параметры: скорость движения вперед 0,8 м/с, скорость барабана 200 об/мин и высота режущей платформы 50 мм. Полевые испытания показывают, что уборочная машина достигает чистой скорости уборки листьев полыни 93,78%, содержания примесей 13,96%, пригодности листьев полыни 86,23% и операционной эффективности 0,155 га/ч, при этом сохраняя стабильную работу в полевых условиях. Помимо этих показателей производительности, уборочная машина снижает зависимость от ручного труда, уменьшает операционные затраты и повышает прибыльность для фермеров. Улучшая устойчивость и механизацию уборки полыни, это исследование предоставляет эффективное решение для культивирования полыни в холмистых и горных регионах и способствует устойчивому развитию отрасли.
1. Введение
Полынь серебристая или китайская (Artemisia argyi) – многолетнее травянистое растение семейства Астровых, широко культивируется по всему Китаю благодаря своей значительной экономической и лекарственной ценности. Листья полыни являются основным ингредиентом в моксах и моксальных столбах, которые широко используются в терапии моксибустион для их эффективности в согревании меридианов, рассеивании холода и влажности, а также облегчении боли [1,2,3,4,5]. Китай является крупнейшим производителем и потребителем полыни, с регионом Цичунь в провинции Хубэй, лидирующим в отрасли, с площадью посадки 15 618 гектаров (га) [6].
Несмотря на быстрый рост отрасли полыни, традиционные методы уборки остаются преимущественно ручными. Фермеры либо используют ручные косилки для срезания растений и вручную удаляют листья на перерабатывающих объектах, либо напрямую удаляют листья руками в поле. Эти методы высоко трудоемки и времязатратны, что делает их непригодными для крупномасштабных операций, приводя к неэффективности, высоким затратам на труд и субоптимальным урожаям. Эти вызовы препятствуют модернизации и устойчивости отрасли. Механизированные методы уборки, которые могут повысить эффективность, снизить затраты и повысить продуктивность, таким образом, стали все более urgently needed.
Механизированная уборка полыни была предметом обширных исследований. Отечественные исследования достигли значительных достижений в механизмах удаления листьев и структурных дизайнах. Лай и др. [7] представили гибридный дефолиатор сдвиг-удар, который эффективно смягчил проблемы запутывания листьев; однако его производительность была ограничена трудностями в обработке мягких кончиков листьев. Сан [8] предложил двухскоростную машину для удаления листьев, включающую гибкие натяжные пружинные компоненты и параллельные ролики, достигая повышенной эффективности и сниженного содержания примесей, но ориентированную в основном на сушеную полынь. Ван [9] принял принцип ротационного удара для удаления листьев с высокоскоростными вращающимися барабанами для улучшения отделения листьев, однако его адаптивность к разным сортам полыни и рабочим условиям остается ограниченной. Донг и др. [10] предложили пневматическую бионическую систему удаления листьев, имитирующую движения человеческой руки, оптимизируя ее параметры через ортогональные эксперименты, хотя остаются опасения относительно ее экономической жизнеспособности и долговечности. Чжоу и др. [11] объединили двойное цепное зажимание со спиральными роликами для удаления листьев и механизмами вытягивания стеблей для улучшения отделения листьев полыни от стеблей, достигая более высокой эффективности удаления листьев.
Несмотря на эти достижения, многие существующие дизайны все еще ограничены маломасштабными операциями и лишены адаптивности к разнообразным рельефам и условиям окружающей среды. Кроме того, они часто не соответствуют конкретным механическим и операционным требованиям уборки полыни в сложных топографиях.
Это исследование разрабатывает самоходную уборочную машину для полыни, адаптированную для холмистых и горных рельефов, где традиционные методы механизированной уборки оказываются неэффективными. Интегрируя конкретные характеристики культивирования полыни, уборочная машина спроектирована как эффективное и масштабируемое решение для крупномасштабной механизированной уборки. Интегрируя уникальные характеристики культивирования полыни, это исследование фокусируется на дизайне и разработке ключевых компонентов, включая шасси с гусеничным приводом, механизм барабана с зубьями и гидравлическую систему. Основные вклады этого исследования следующие:
• На основе схем культивирования и inherent физических свойств полыни спроектирована структура барабана с зубьями, и проведен анализ сил на структуре зубьев для определения оптимального дизайна и расположения зубьев. Также изучена кинематика зубьев. Используя программное обеспечение RecurDyn 2023, смоделирована траектория движения зубьев, и выполнена постобработка с модулем Post для определения оптимального диапазона скоростей для эффективной работы, тем самым улучшая эффективность работы.
• Спроектирована гидравлическая система с детальными расчетами и выбором компонентов для гидравлических цилиндров, моторов, насосов и других гидравлических компонентов, обеспечивая соответствие системы требованиям производительности и предоставляя надежную поддержку мощности для уборочной машины.
• Установлена математическая модель между экспериментальными факторами и показателями производительности через ортогональный ротационный комбинированный эксперимент центрального композиционного дизайна. На основе анализа программного обеспечения Design-Expert 13 определена оптимальная комбинация параметров.
Эти усилия предназначены для поддержки модернизации отрасли полыни, одновременно продвигая устойчивые сельскохозяйственные практики.
2. Структура машины и принцип работы
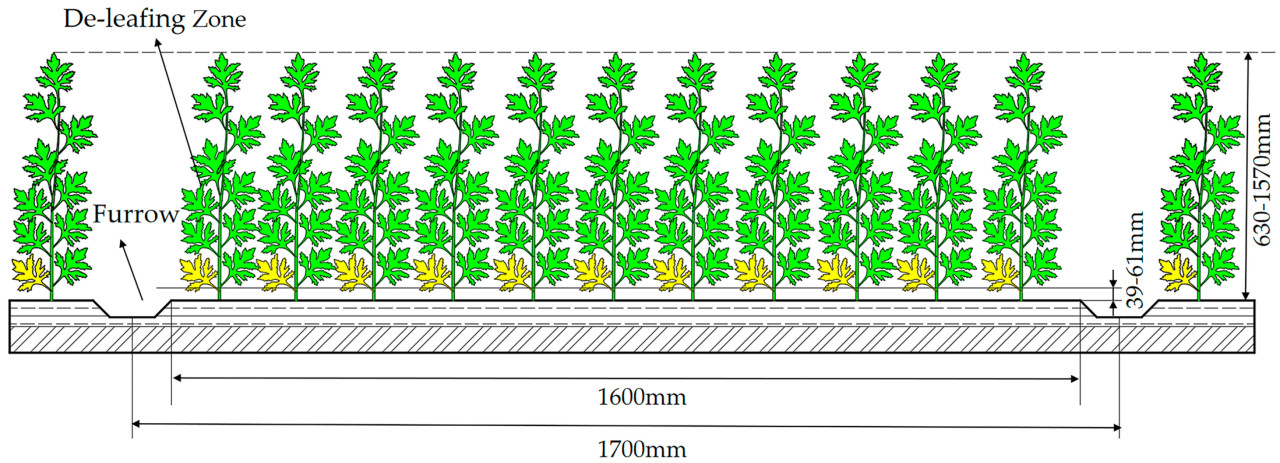
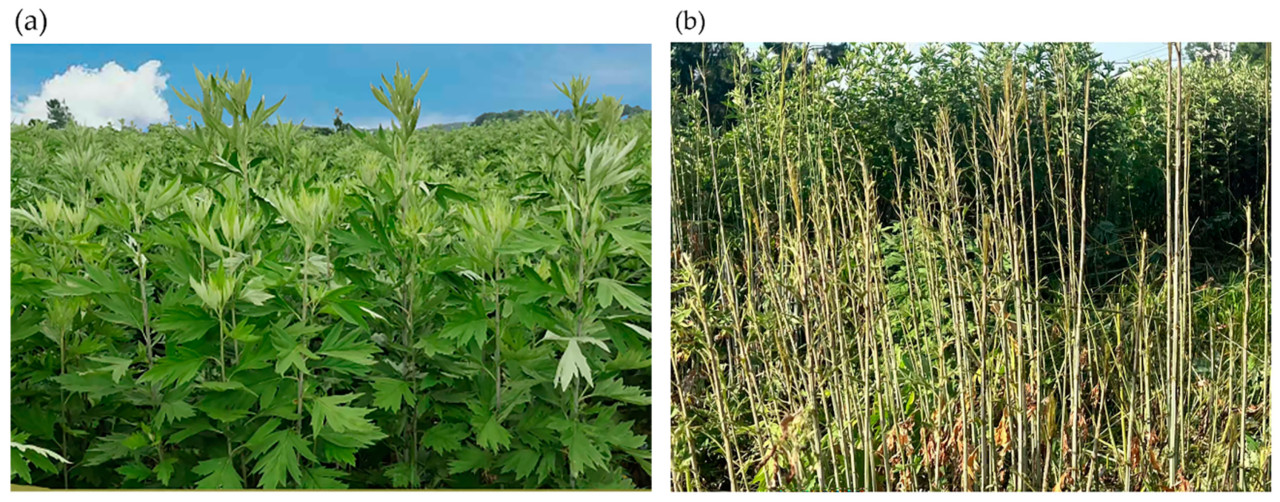
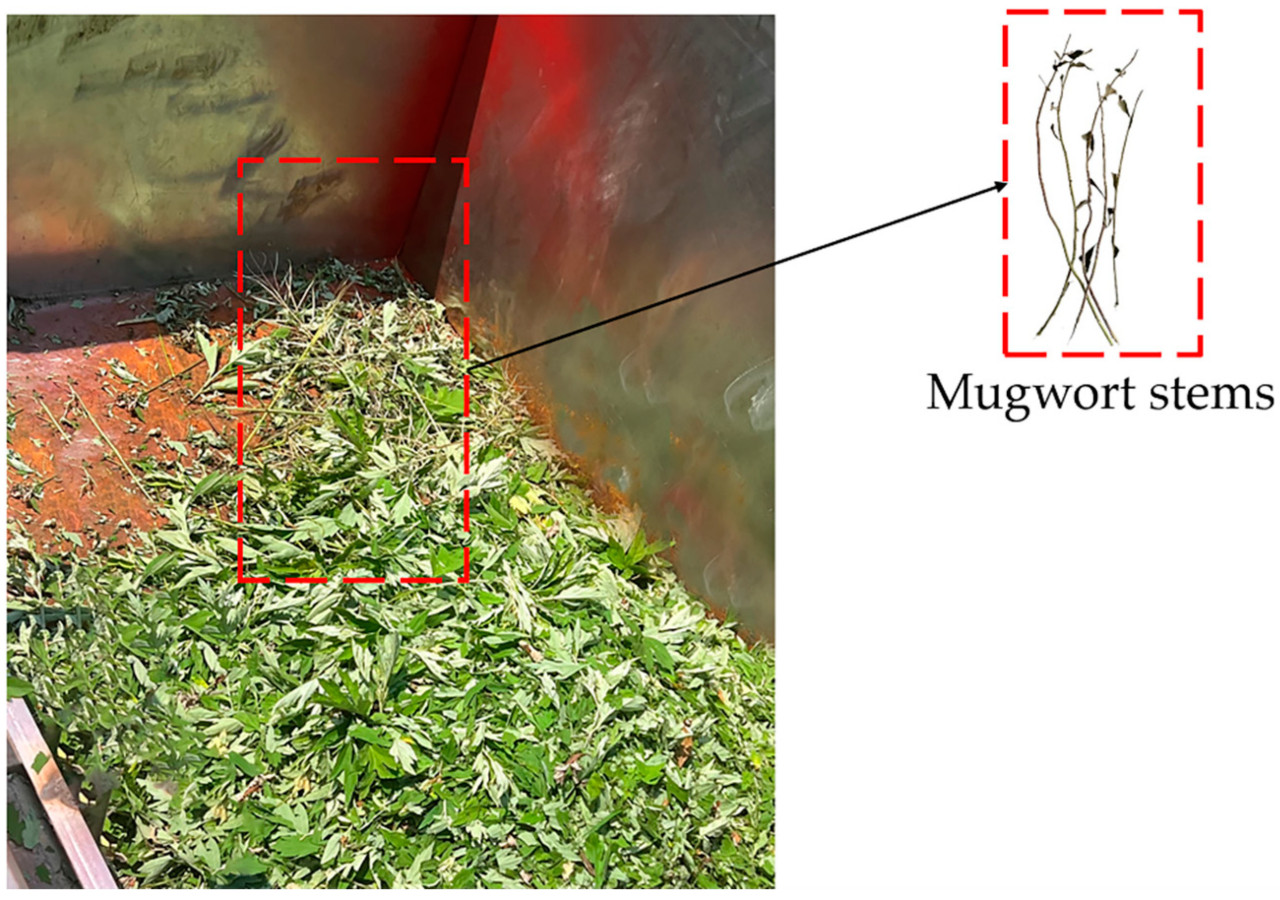
Полынь арги — это травянистое растение, высоко чувствительное к переувлажнению. Оно лучше всего растет на склонах и гребнях, которые обеспечивают хороший дренаж и помогают предотвратить гниение корней. Образцы полыни в этом исследовании были зрелыми растениями, собранными из уезда Цичунь, провинция Хубэй. Эти растения выращивались с расстоянием посадки 39-61 мм и шириной гребня 1600 мм, как показано в Таблице 1. Рекомендуемый метод уборки включает сбор свежих листьев полыни, оставляя небольшое количество увядших желтых листьев на растениях, как показано на Рисунке 1.

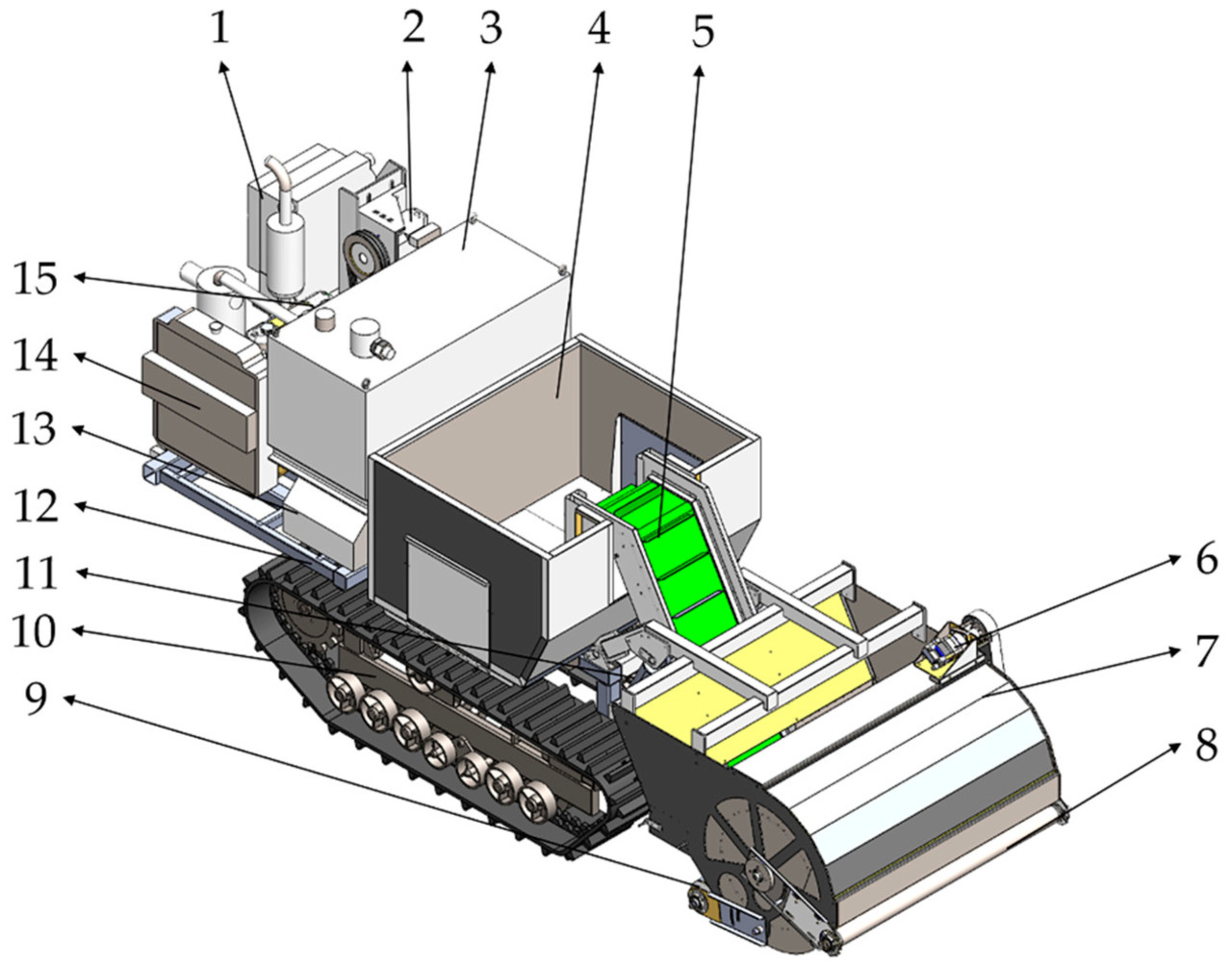
Как показано на Рисунке 2, трехмерная схематическая структура уборочной машины для полыни в основном состоит из уборочной платформы, гусеничного шасси и внутренних компонентов кузова. Уборочная платформа, расположенная спереди, включает барабан с зубьями, поперечный конвейерный ленточный транспортер, подъемный конвейерный ленточный транспортер, прижимные шкивы и опорные колеса, обеспечивая эффективную уборку и транспортировку листьев полыни. Гусеничное шасси включает дизельный двигатель, плунжерный переменный насос и механизм гусеничного хода, обеспечивая мощность для рабочих устройств и системы движения.
Вместо традиционного места водителя и консоли управления уборочная машина оснащена системой дистанционного управления для управления всеми функциями. Этот дизайн минимизирует размер машины, снижает ее вес, повышает операционную гибкость и значительно снижает нагрузку на оператора. Система дистанционного управления состоит из передатчика, приемника сигнала, процессора сигнала и цепи привода. Она использует двойной джойстик F24- 60 из серии Lee Telecrane, работающий на частоте 310,3-331,165 МГц с диапазоном управления до 200 м. Контроллер построен вокруг микроконтроллера STM32G030C8T6, интегрируя модуль преобразования мощности, пропорциональный усилительный контур, регулировочный контур и модуль связи [12].
Вспомогательные компоненты, такие как источник питания транспортного средства, дизельный бак, бак гидравлического масла, гидравлические контрольные клапаны, радиатор и интегрированная система управления, систематически размещены внутри кузова транспортного средства. Эти компоненты обеспечивают эффективную и стабильную работу уборочной машины, а также облегчают рутинное обслуживание и ремонт.
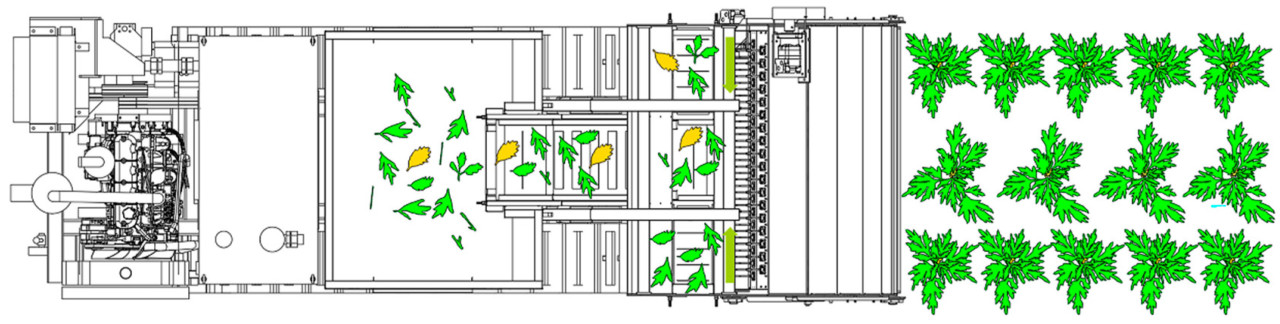
Уборочная машина для полыни использует полностью гидравлический привод. Как показано на Рисунке 3, ее принцип работы следующий: уборочная платформа движется вперед по бороздам с гусеничным шасси, где прижимные колеса наклоняют полынь, а быстро вращающийся барабан с зубьями счищает листья. Под действием центробежной силы листья выбрасываются тангенциально на поперечный конвейерный ленточный транспортер и впоследствии транспортируются в бункер материала подъемным устройством, завершая процесс уборки. В ходе этого процесса стерня сохраняется для регенерации ветвей и листьев, позволяя множественные уборки в течение трехлетнего периода.
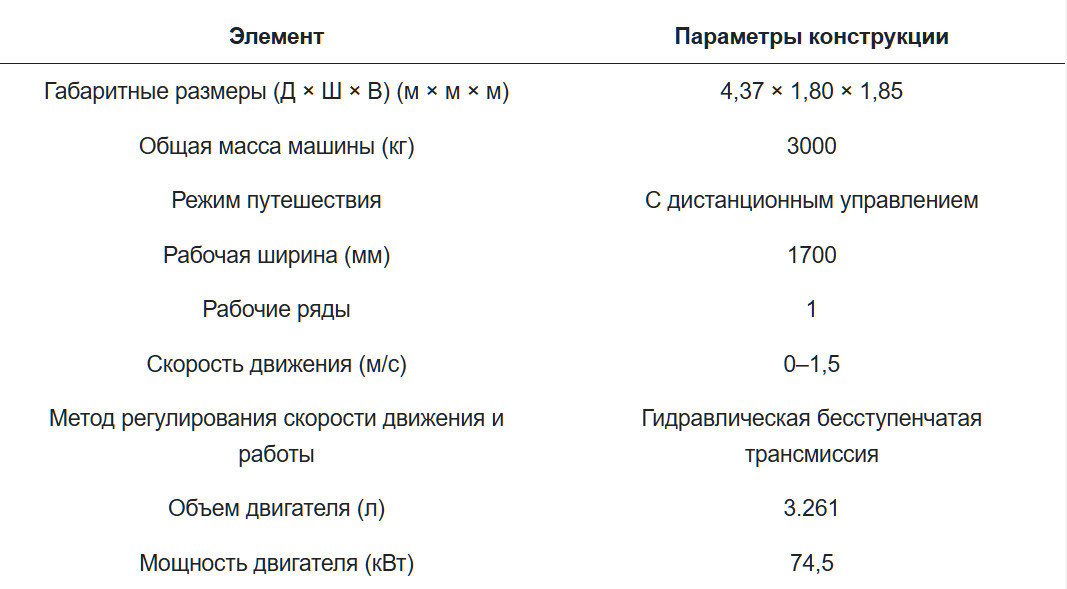
Следует отметить, что ключевые параметры компонентов, такие как высота уборочной платформы и скорость вращения барабана с зубьями, регулируемы. Эта адаптивность обеспечивает соответствие уборочной машины требованиям разных агрономий посадки, стадий роста и сортов полыни. Таблица 2 перечисляет основные технические параметры полностью гидравлической, гусеничной, дистанционно управляемой уборочной машины для полыни, предназначенной для холмистых и горных регионов.
3. Дизайн ключевых механических структур и параметризация
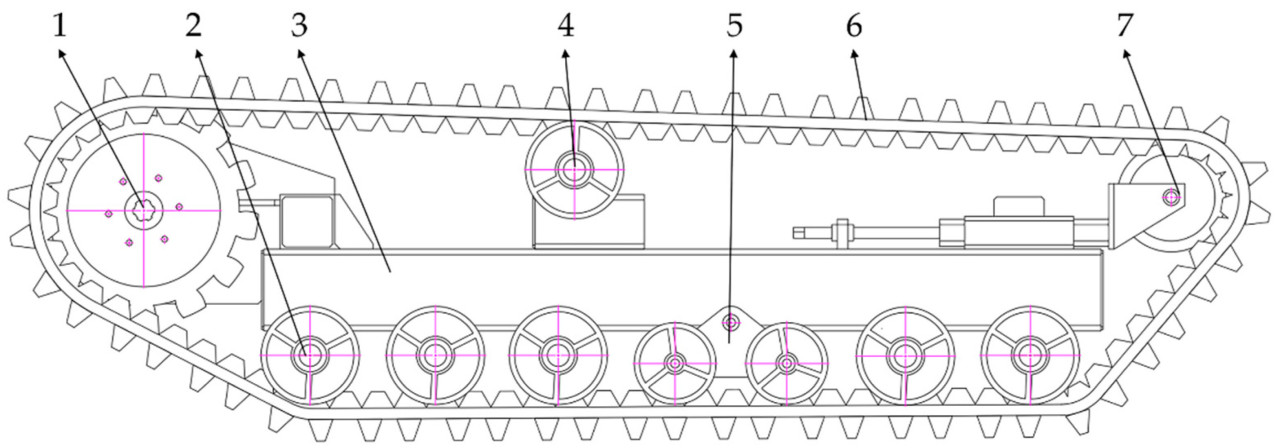
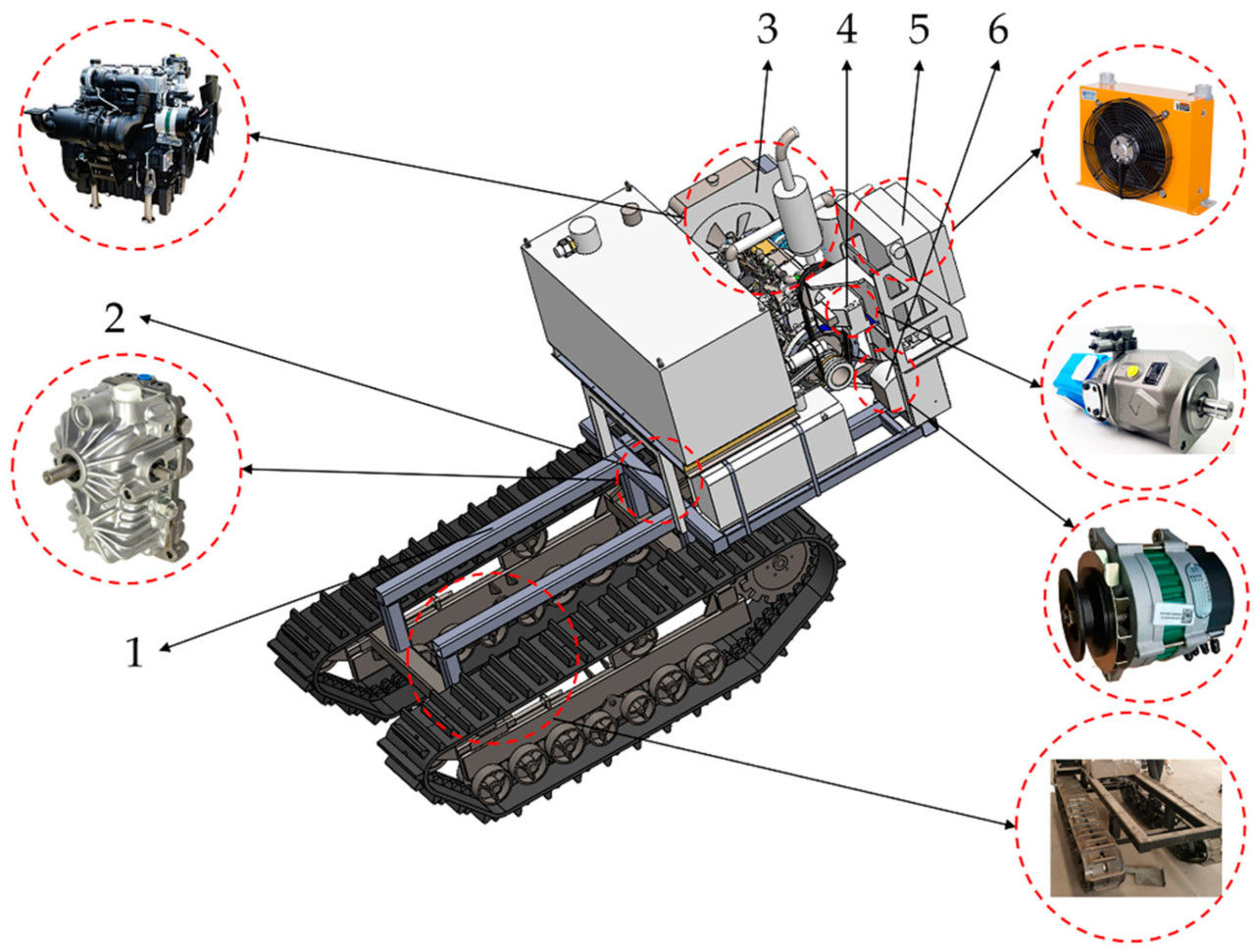
Как показано на Рисунке 4, принцип работы гусеничного шасси включает зацикливание непрерывных резиновых гусениц вокруг ведущих колес и серии роликов. Ведущие колеса приводят гусеницы в движение, генерируя качение, которое приводит шасси вперед, минимизируя проскальзывание [13, 14]. Ключевые структурные параметры гусениц, включая шаг, ширину, длину заземления и диаметры шаговых окружностей ведущих и опорных колес, были тщательно рассчитаны для оптимизации тяги и стабильности.
Проходимость комбайна по полю оценивалась на основе преобладающего типа почвы в уезде Цичунь провинции Хубэй, где широко культивируется полынь. Почва в этом регионе преимущественно состоит из красного суглинка, который является хорошо дренируемым, стабильным и твердым типом почвы. Учитывая эти характеристики, а также отсутствие переувлажнения или грязных условий во время работы, гусеничный дизайн не требует корректировок для грязных полевых условий. Вместо этого дизайн сосредоточен на обеспечении стабильности и тяги на склонах, которые типичны для зон культивирования полыни [15].
Использование резиновых гусениц усиливает контакт с землей и снижает уплотнение почвы, делая его высоко подходящим для таких рельефов. Эта адаптация к конкретному типу почвы соответствует операционным требованиям склоновых сред, где гибкость и стабильность, обеспечиваемые резиновыми гусеницами, критически важны для эффективной и надежной производительности.
Шаг гусеницы варьируется в зависимости от общей массы машины [16, 17, 18] и рассчитывается с использованием следующей формулы:

где t0 — шаг гусеницы, мм; m — общая масса машины, кг.
Ширина гусеничной плиты b рассчитывается как:

Длина заземления гусеницы L1 должна соответствовать ширине гусеничной плиты b и рассчитывается по формуле:

где λ′ — коэффициент масштабирования, принятый как 0,185.
Расстояние между гусеницами В (ширина колеи) рассчитывается как:

Количество зубьев на ведущем колесе составляет 13, а диаметр шаговой окружности Dk ведущего колеса рассчитывается как:

где Z — количество зубьев на ведущем колесе.
Направляющее колесо установлено на переднем конце гусеничного блока для предотвращения смещения и соскальзывания гусеницы. Диаметр направляющего колеса Dt рассчитывается по формуле:

Имеется пять опорных колес, поддерживаемых несколькими шарнирами и равномерно распределенных вдоль дна гусеницы. Диаметр шаговой окружности (dz) опорных колес рассчитывается с использованием следующей формулы:

Основные параметры механизма гусеничного хода, рассчитанные по Уравнениям (1)-(7), перечислены в Таблице 3.
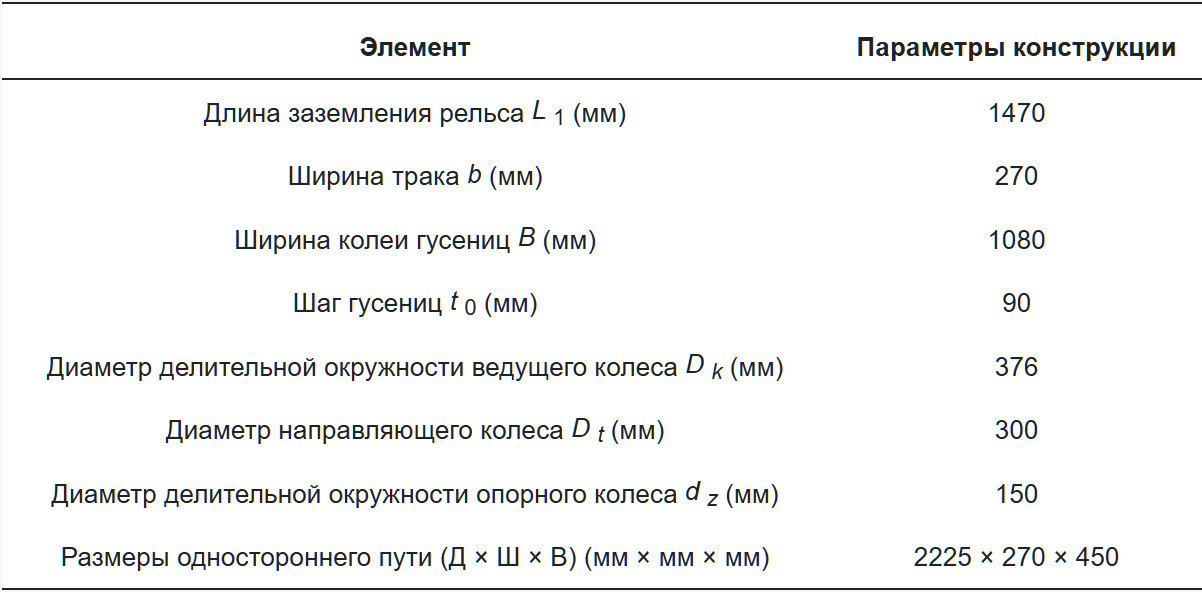
Ядерная структура уборочной машины для полыни, показанная на Рисунке 5, состоит из ключевых компонентов, включая прижимные шкивы, опорные колеса, барабан с зубьями, гидравлический мотор, поперечный конвейерный ленточный транспортер и подъемный конвейерный ленточный транспортер. В приложениях уборки зубчатые зубья с похожими функциями могут быть классифицированы на несколько типов на основе структурных различий, таких как барабаны с зубьями, барабаны с гребневыми зубьями и барабаны с шиповыми зубьями.
С точки зрения производительности уборки, тип с гребневыми зубьями склонен к засорению из-за материала растений, блокирующего зазоры между зубьями, в то время как тип с шиповыми зубьями более склонен вызывать повреждение урожая. Поэтому для уборки свежих листьев полыни используется барабан с зубьями (Рисунок 5), приводимый в движение гидравлическим мотором, для ротационного отделения листьев. В отличие от пшеницы или риса, поверхностные ткани листовых растений высоко подвержены повреждению [19]. Структура барабана с зубьями не только достигает эффективного удаления листьев, но и минимизирует засорение и повреждение листьев [20, 21, 22].
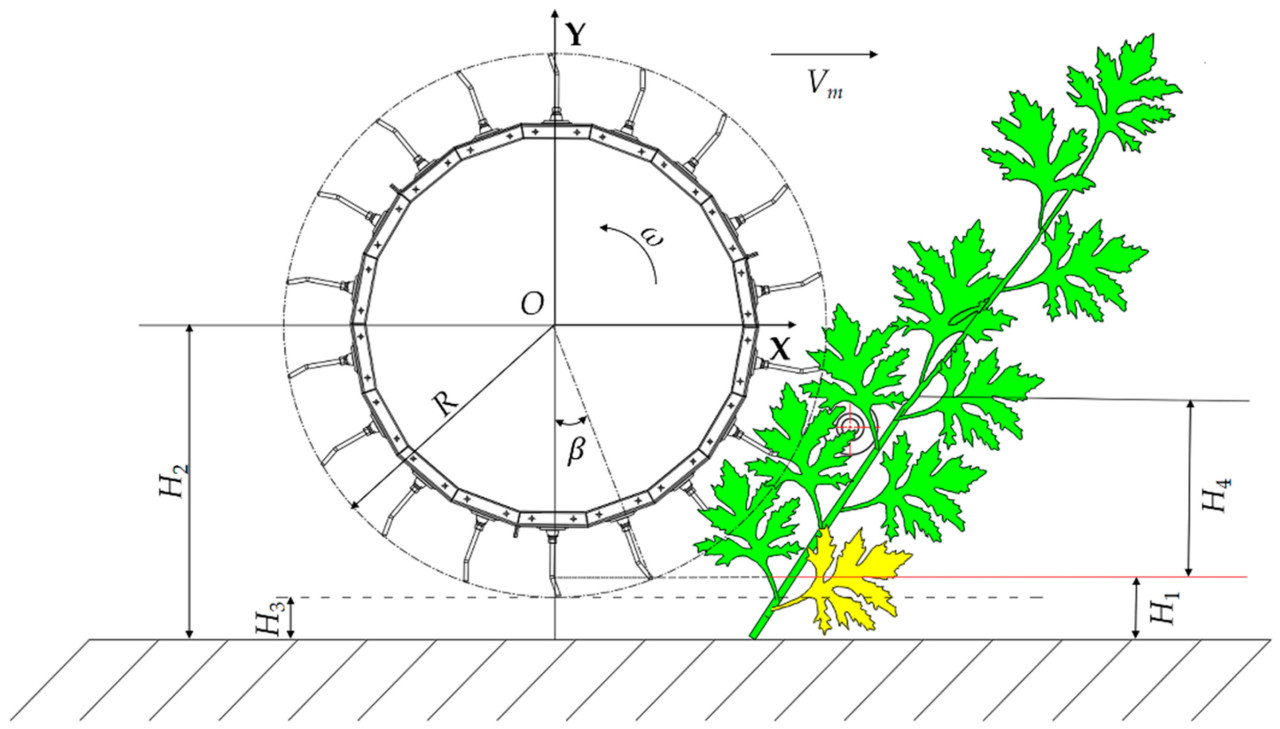
Листья полыни равномерно распределены вдоль стебля. Чтобы обеспечить покрытие уборочной зоны всеми регионами, где присутствуют листья полыни, радиус от кончика зубьев на барабане до центра оси (называемый радиусом барабана с зубьями R) должен быть адаптирован к физическим характеристикам растения [22, 23]. Радиус определяется факторами, такими как высота прижимного шкива относительно растения полыни, высота увядших листьев и положение контакта между зубьями и нижними листьями. Чтобы обеспечить, что удаленные листья полыни остаются на барабане и транспортируются в верхнюю область несущего конвейера через инерцию, точка контакта между зубьями и нижними листьями должна образовывать угол β с самой нижней точкой зубьев. Кроме того, самая нижняя часть зубьев должна быть расположена выше высоты увядших листьев. Чтобы избежать соскребания почвы, должен сохраняться зазор между самой нижней точкой зубьев и землей, удовлетворяющий следующей формуле:

где Н1 — высота увядших листьев полыни, мм.
Чтобы обеспечить, что радиус барабана с зубьями покрывает всю область свежих листьев на растении полыни, должно выполняться следующее уравнение:

где Н4 — высота центра приплюснутой полыни, мм.
Диапазон значений для радиуса R барабана с зубьями определяется следующим образом [24]:

В это время высота самой нижней точки зубьев барабана с зубьями от земли составляет:

где НЗ — высота самой нижней точки зубьев барабана с зубьями от земли, мм.
Согласно физическим параметрам, измеренным и записанным в Таблице 1, уборочный диапазон длины Н4 свежих листьев полыни, сплющенных прижимным шкивом, составляет 300 мм, в то время как высота Н1 увядших листьев принимается как максимальное значение 61 мм. Угол β может быть рассчитан с использованием Уравнения (10), и он должен быть меньше 33°. Согласно Уравнению (11), когда радиус R барабана с зубьями фиксирован, больший β приводит к меньшей высоте от земли. Поэтому β не должен быть слишком большим, и в этом дизайне он установлен на 20°.
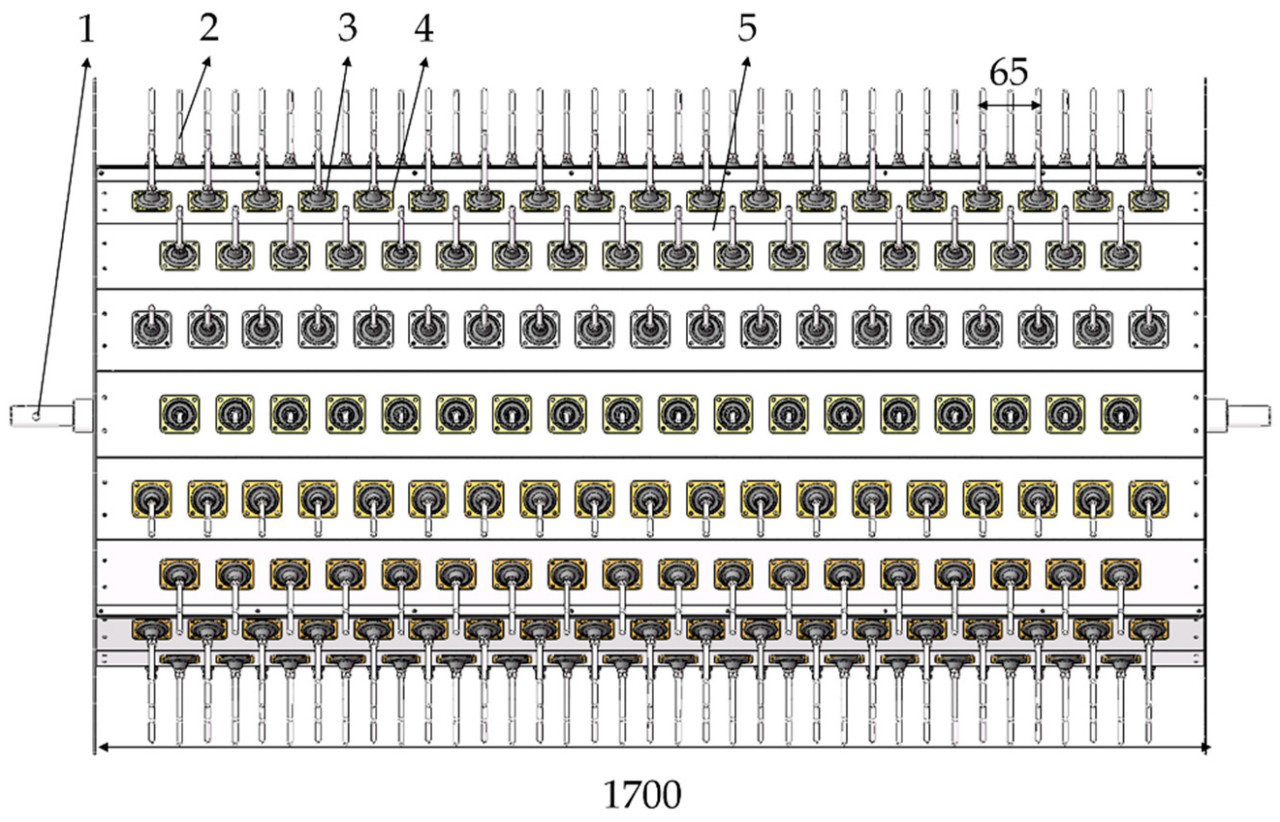
Диапазон радиуса R барабана с зубьями составляет 319,3-1011,5 мм. Когда β = 20° и высота от земли 40 мм, учитывая общие структурные размеры, радиус барабана с зубьями выбран как 400 мм. Ширина ряда посадки полыни составляет 1600 мм, как показано на Рисунке 6. Чтобы обеспечить уборку одного ряда за один проход, осевая длина барабана для удаления листьев спроектирована как 1700 мм.
3.3.1. Распределение зубьев
Как показано на Рисунке 6, листья полыни в основном растут вокруг главного стебля. Чтобы обеспечить, что каждое растение тщательно прочесывается во время работы, необходимо несколько раз ударять по области роста листьев [25, 26]. Время (t' ) для прохождения барабана через область роста листьев полыни может быть выражено как:

где WI — ширина области роста листьев полыни, см.
В это время барабан вращается на угол (α), заданный:

где ω′ — угловая скорость барабана, рад/с.
Если каждое растение полыни может быть очищено после k ударов зубьев барабана, отношение между общим количеством рядов зубьев (Н) и k может быть выражено как:

Ссылаясь на Таблицу 1, ширина полыни установлена на 13 см, а скорость движения вперед машины — 0,8 м/с. Общее количество рядов зубьев прямо пропорционально количеству ударов и обратно пропорционально скорости барабана. Предварительные тесты показали, что когда линейная скорость зубьев барабана превышает 13 м/с, скорость поломки листьев полыни значительно увеличивается. Поэтому скорость барабана установлена на более низкое значение 200 об/мин, при котором Н может быть выражено как:

Учитывая плотную посадку полыни, k установлено на более высокое значение 6, приводя к общему количеству 18 рядов зубьев на барабане.
Чтобы достичь одновременной уборки гребня, начальное расстояние (d) между двумя соседними зубьями установлено на 65 мм, расположенными в прямой линии. Как показано на Рисунке 7, поверхность барабана равномерно распределена с 18 рядами зубьев по окружности, с соседними рядами сдвинутыми. Упругие зубья фиксированы к внешней стенке барабана с использованием заклепок, и их основания обернуты резиновыми рукавами для обеспечения долговечности и структурной целостности [27].
Как показано на Рисунке 8, диапазон удаления листьев (L) определяется как расстояние от круглого кончика упругих зубьев до вулканизированной резины у корня зуба. Если интервал удаления листьев слишком мал, растения полыни могут быть чрезмерно сжаты, увеличивая скорость поломки и снижая чистую скорость уборки листьев полыни. Если интервал слишком велик, частота контакта между листьями и упругими зубьями уменьшается, что также снижает чистую скорость уборки листьев.
Таким образом, интервал удаления листьев должен соответствовать высоте стебля растения полыни, который наклонен и прижат близко к корню прижимным шкивом. Полевые измерения показывают, что эта высота обычно варьируется между 90 мм и 130 мм. На основе этих измерений диапазон удаления листьев установлен на L = 110 мм в этом дизайне.
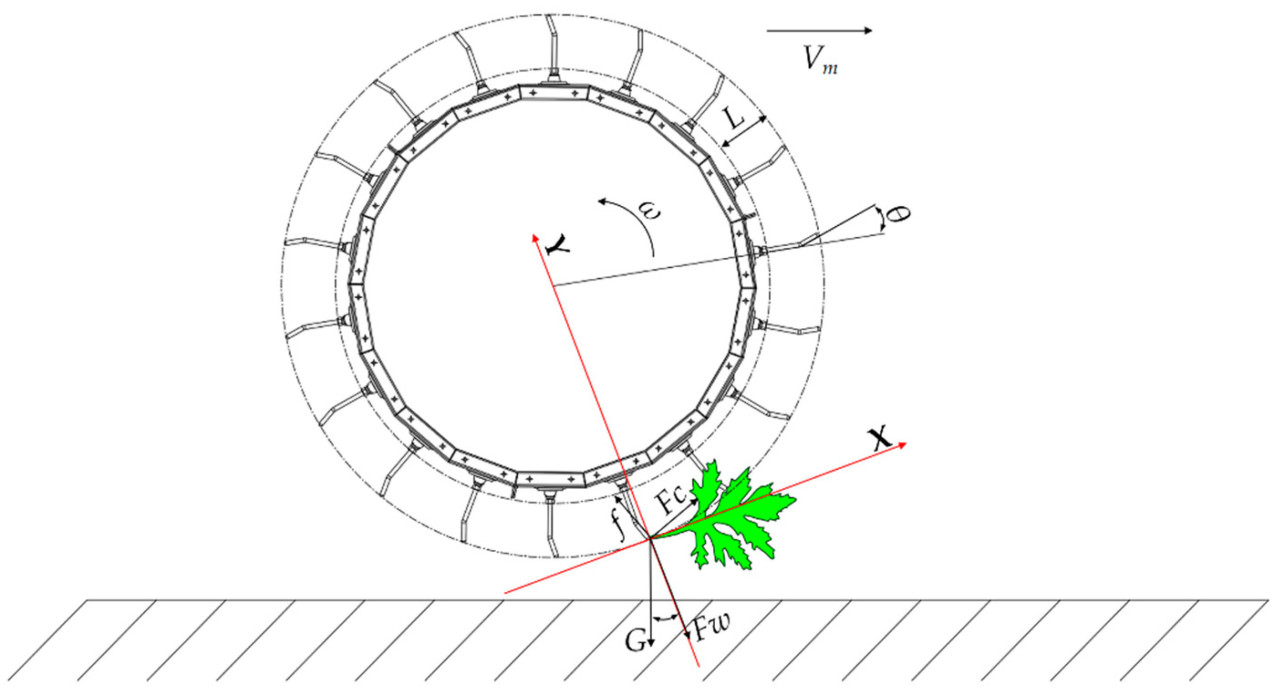
Как показано на Рисунке 8, угол θ, образованный между осью пружинной проволоки на конце упругого зуба для удаления листьев и линией, соединяющей центр барабана с упругим зубом, является углом наклона упругого зуба [28] (положительный для наклона вперед, отрицательный для наклона назад). Этот угол напрямую влияет на эффективность удаления листьев. Когда позиционный угол у находится между 0° и 90°, растение полыни находится в стадии удаления листьев. В это время сила на листе полыни в направлении оси х задается:

где

где Fc — опорная сила упругого зуба на ai лист, H; f — сила трения между упругими зубьями и листом полыни, H; G — гравитационная сила листа полыни, Н; μ — коэффициент статического трения упругого зуба, H.
Согласно Уравнению (16), по мере увеличения угла наклона θ упругих зубьев для удаления листьев чистая сила (∑Fx) на листе полыни вдоль оси х уменьшается. Это приводит к снижению несущей энергии, оказываемой упругими зубьями на листья полыни, делая это менее благоприятным для эффективного удаления листьев с растения полыни.
Когда позиционный угол у расположен между -90° и 0°, лист полыни входит в стадию отделения. В этом случае сила на листе вдоль оси у задается:

Согласно Уравнению (18), по мере увеличения угла наклона (θ) чистая сила (∑Fy) на листе полыни вдоль оси у уменьшается, что усиливает несущую энергию, делая это более благоприятным для отделения листьев.
Из вышеприведенного анализа видно, что существует компромисс между способностью к удалению листьев и способностью к отделению упругих зубьев для удаления листьев. На основе опыта дизайна из ссылки [29], угол наклона упругих зубьев для удаления листьев обычно выбирается в диапазоне от 0° до 30°. Комбинируя результаты из нескольких экспериментов, угол наклона (θ) установлен на 20° в этом дизайне.
Во время движения вперед уборочной машины барабан с зубьями подвергается композитному движению, состоящему из линейного и ротационного движений. Движение барабана с зубьями показано на Рисунке 6. Предположим, что центр барабана — это начало координат O, направление движения вперед уборочной машины — вдоль положительной оси х, а вертикально вверх — вдоль положительной оси у. Соответственно установлена прямоугольная система координат. Уравнение траектории перемещения произвольной конечной точки упругого зуба (M0 ) в момент времени (t) выражается следующим образом [30]:

где vx — горизонтальная частичная скорость конечной точки упругого зуба, м/с; vy — вертикальная скорость конечной точки упругого зуба, м/с.
Беря первую производную уравнения перемещения, частичные скорости в направлениях х и у на конечной точке (M0 ) любого упругого зуба могут быть выражены как:

где vx — горизонтальная частичная скорость конечной точки упругого зуба, м/с; vy — вертикальная скорость конечной точки упругого зуба, м/с.
Комбинированная скорость (v) на конечной точке (МО) любого упругого зуба рассчитывается путем подстановки в уравнение комбинированной скорости как:

Траектория конечной точки упругого зуба относительно земли зависит от отношения (X) между линейной скоростью конечной точки на упругом зубе и скоростью движения вперед уборочной машины. Траектории барабана, соответствующие разным значениям X, показаны на Рисунке 9.

где Vs — линейная скорость конечной точки упругого зуба, м/с.
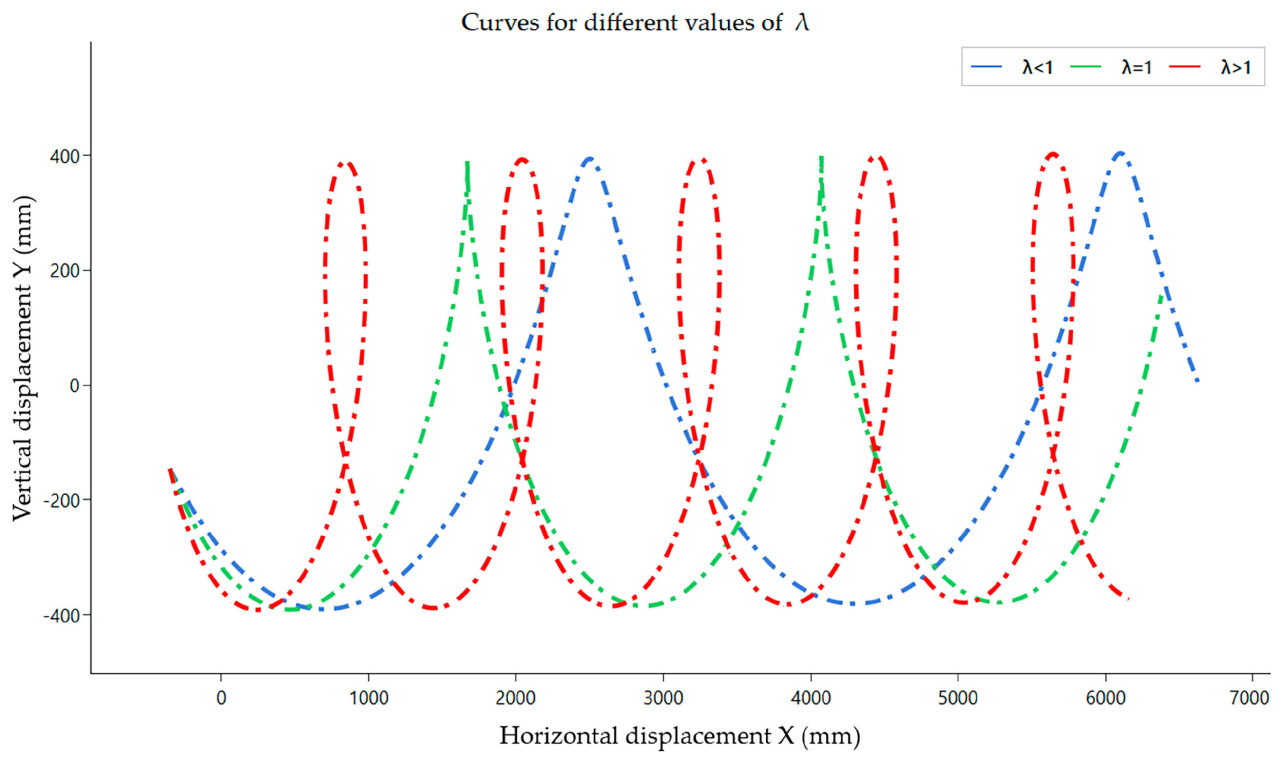
Параметр λ значительно влияет на траекторию упругого зуба. Как показано на Рисунке 9, траектория движения конечной точки упругого зуба моделируется с использованием программного обеспечения RecurDyn 2023. Траектория изменяется с вариациями λ, приводя к трем различным траекториям движения для случаев λ > 1, λ = 1, and λ < 1.
Чтобы обеспечить, что ролик прочесывает листья полыни и бросает листья на конвейерный ленточный транспортер, барабан с упругими зубьями должен обладать горизонтальной частичной скоростью. Когда λ > 1, возникает условие vx < 0 [31], позволяя эффективно сбрасывать листья полыни.
Изгибающий момент (М), действующий на упругий зуб, может быть выражен как [29]:

где F — комбинированная сила на упругом зубе, Н.
Прогиб y в конечной точке упругого зуба определяется по формуле:

где

где где Е — модуль упругости материала упругого зуба, МПа; I — момент инерции поперечного сечения упругого зуба, мм4; dt — диаметр упругого зуба, мм.
Максимальное статическое напряжение σ составляет:

где

где W — коэффициент сечения изгиба, мм3.
Материал упругого зуба — пружинная сталь 65Мп, с модулем Юнга 210 ГПа, плечом силы L 110 мм и диаметром dt 5 мм. Комбинированная сила, действующая на упругий зуб, в основном происходит от преодоления соединяющей силы между листьями полыни и стеблями. Согласно литературе [11,32], максимальная сила уборки варьируется с углом растяжения (0°, 30°, 45°, 60° и 90°) следующим образом: 8,77-11,75 Н, 7,81-15,69 Н, 8,4-20,89 Н, 8,99-17,99 Н и 6,39-11,08 Н соответственно. Поскольку это исследование использует метод удаления листьев снизу вверх, соответствующий шаблону роста растений полыни, выбрана максимальная сила уборки стебель-лист 20,89 Н при 45°.
На основе анализа сил упрощенная модель упругого зуба была импортирована в программное обеспечение ANSYS 2022 для анализа конечных элементов. Материал — 65Мп, и его свойства были назначены. Поверхность упругого зуба была разделена на сетку, и применены граничные условия, такие как нагрузки. Результаты моделирования следующие:
Рисунок 10а показывает анализ общей деформации. Максимальная деформация происходит на конечной точке упругого зуба, с максимальным значением деформации 0,2651 мм.

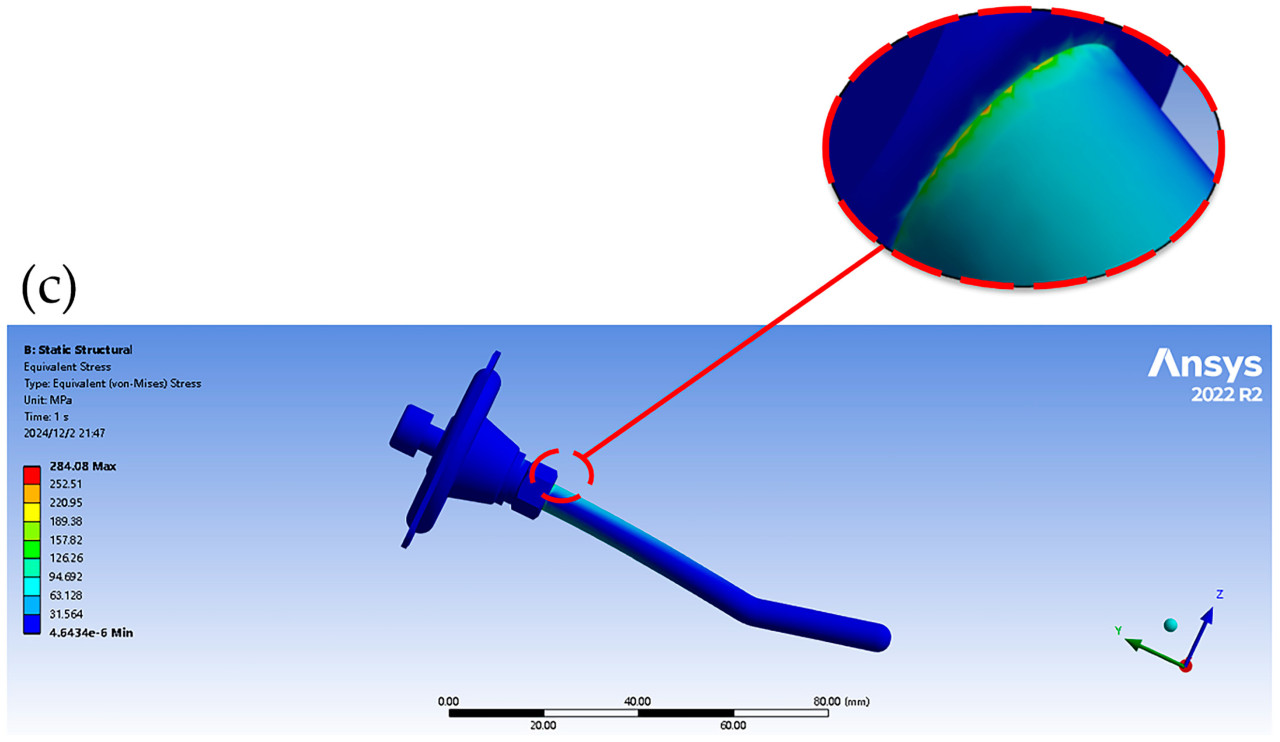
Рисунок 10Ь показывает анализ деформации. Максимальная эквивалентная деформация происходит на соединении между упругим зубом и гайкой, с максимальным значением деформации 1,3566 х 10-3.
Рисунок 10с показывает анализ эквивалентного напряжения. Максимальное эквивалентное напряжение происходит на соединении между упругим зубом и гайкой, с максимальным значением напряжения 284,08 МПа, что ниже допустимого напряжения материала 65Mn (σb=780-980 МПа).
Согласно результатам моделирования, дизайн соответствует рабочим требованиям упругого зуба.
4. Дизайн гидравлической трансмиссии и блока привода гусениц
По сравнению с традиционной механической трансмиссией, гидравлическая трансмиссия позволяет бесступенчатую регулировку скорости. При одинаковых условиях мощности гидравлические системы меньше и компактнее, приводя к более эффективной общей механической структуре. Система подачи гидравлического масла уборочной платформы использует открытый гидравлический контур, с исполнительными механизмами, включая ротационный гидравлический мотор и гидравлические цилиндры, выполняющими желаемые функции. Детальная схема гидравлической системы показана на Рисунке 11.
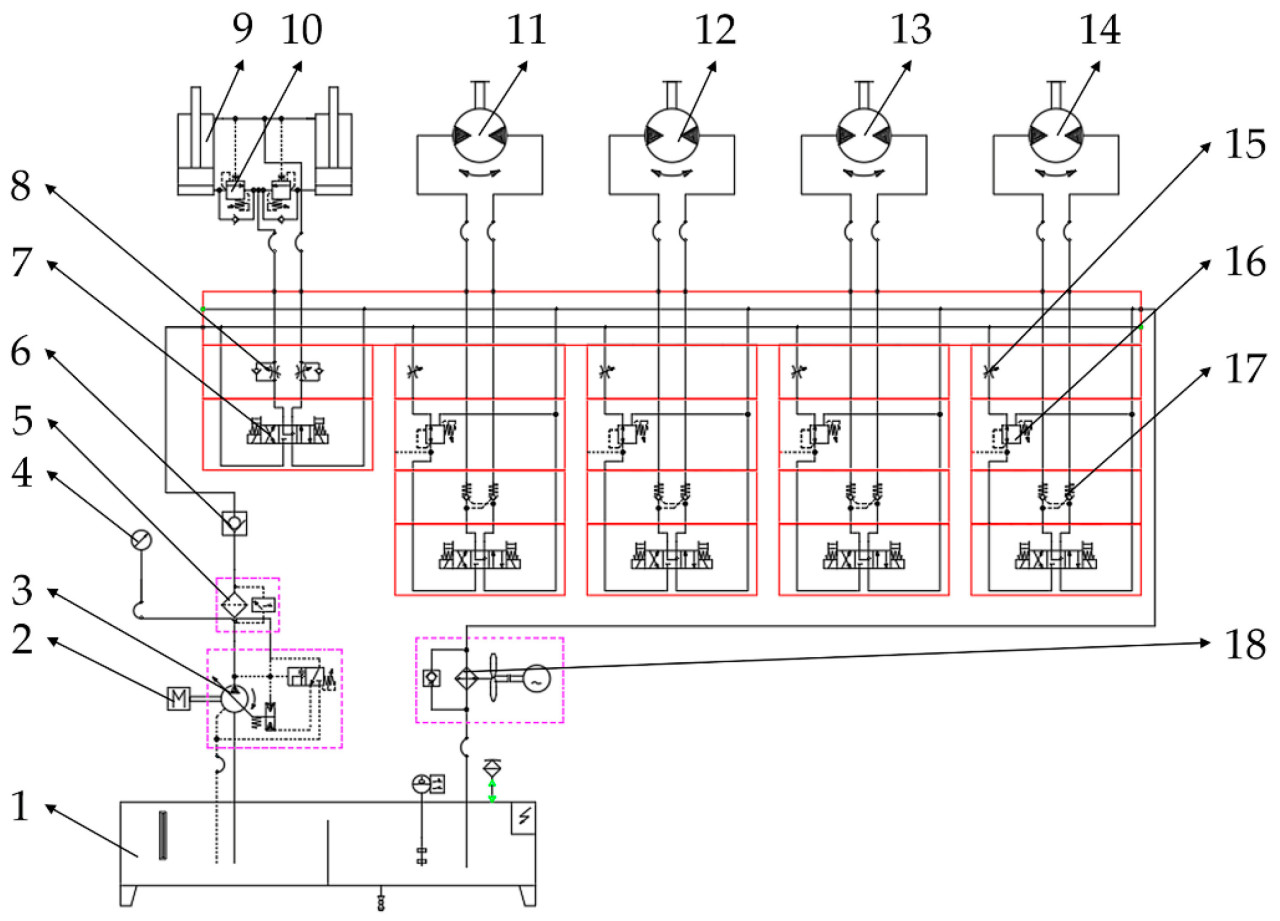
Машина для сбора свежих листьев полыни — типичная сельскохозяйственная шагающая машина. На основе диапазона рабочего давления разного оборудования [31], системное проектное давление для сельскохозяйственной техники варьируется от 7 МПа до 21 МПа. Для данного исследования давление в гидравлической системе выбрано как 16 МПа.
4.2.1. Определение параметров гидравлического привода для барабана с упругими зубьями
Барабан с упругими зубьями приводится в движение гидравлическим мотором через цепную трансмиссию. Барабан имеет диаметр 800 мм и осевую длину 1700 мм. Анализ основан на уборочной емкости барабана и емкости транспортировки материала конвейерного ленточного транспортера для уборки всего гребня.
Из анализа Рисунка 12 выше уравнение крутящего момента барабана задается [33]:

где Mf — крутящий момент, оказываемый фиксирующим седлом упругого зуба на ось барабана, Н·м; Fa — гравитационная сила листьев полыни, Н; Fb — опорная сила растения на барабан, Н; I — рабочая ширина барабана, мм; Rn — радиус ролика, мм; Ra, Rb, Rc — плечи сил каждой силы на центр оси барабана, мм; Та, ТЬ, Тс — моменты инерции каждой силы на центр оси барабана, Н·м.
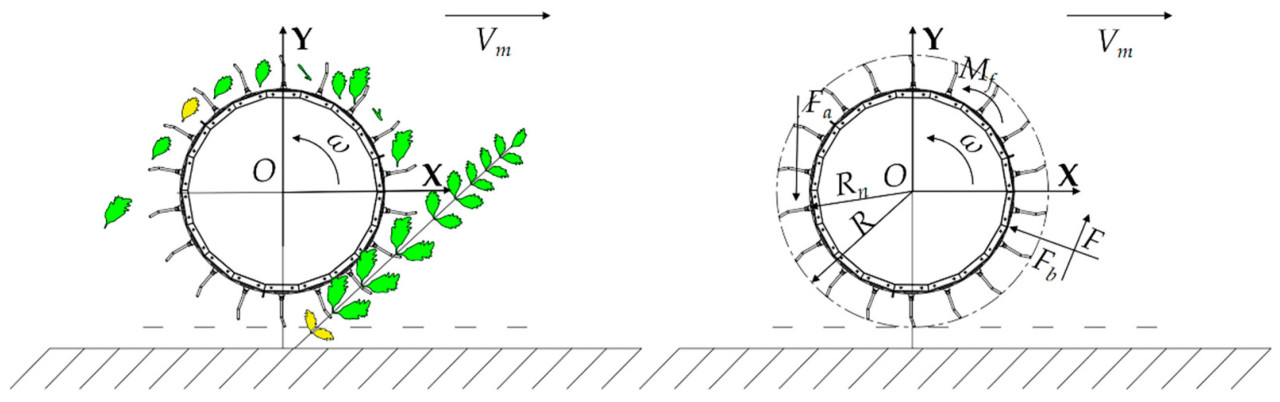
Листья полыни, после сбора упругими зубьями, подвергаются ротационной инерционной силе барабана и гравитации, которая бросает листья на конвейерный ленточный транспортер позади. Предполагая, что каждая единица листа полыни — жесткое тело, сила инерции массы на барабане может быть разложена на нормальную инерционную силу (Fn) и тангенциальную инерционную силу (Ft). Поскольку уборочный барабан движется равномерно во время работы [30], его угловое ускорение равно нулю, что означает, что тангенциальная инерционная сила из-за гравитации листьев также равна нулю. Вышеприведенный анализ приводит к следующему уравнению:

Предполагая, что сила на упругом зубе равномерно распределена, центр зуба выбран как точка приложения силы, Поэтому R 1=R n+ (R−R n)/2 , что может быть подставлено в Уравнение (29).

Подставляя Уравнение (30) в Уравнение (29), крутящий момент барабана может быть выражен как:

Крутящий момент (Mf), оказываемый фиксирующим седлом единичного упругого зуба на ось, составляет 2,2972 Н·м. Сила (F), необходимая для преодоления соединения перелома лист- стебель, составляет 20,89 Н. Средний вес листа полыни — 0,5 г. Согласно литературе [34], скорость барабана варьируется от 160 до 240 об/мин, с наилучшим эффектом удаления листьев, подтвержденным при 200 об/мин. Подставляя параметры в Уравнение (31), нагрузочный крутящий момент мотора барабана составляет 338 Н·м.
Гидравлический мотор передает приводную силу барабану с зубьями через цепную трансмиссию, как показано на Рисунке 13. Рабочий объем (Va) гидравлического мотора для барабана с зубьями рассчитывается с использованием следующей формулы:

где Т — нагрузочный крутящий момент гидравлического мотора, Н·м; р — рабочее давление гидравлического мотора, МПа; ηm — механический КПД гидромотора, η m= 0,95 .
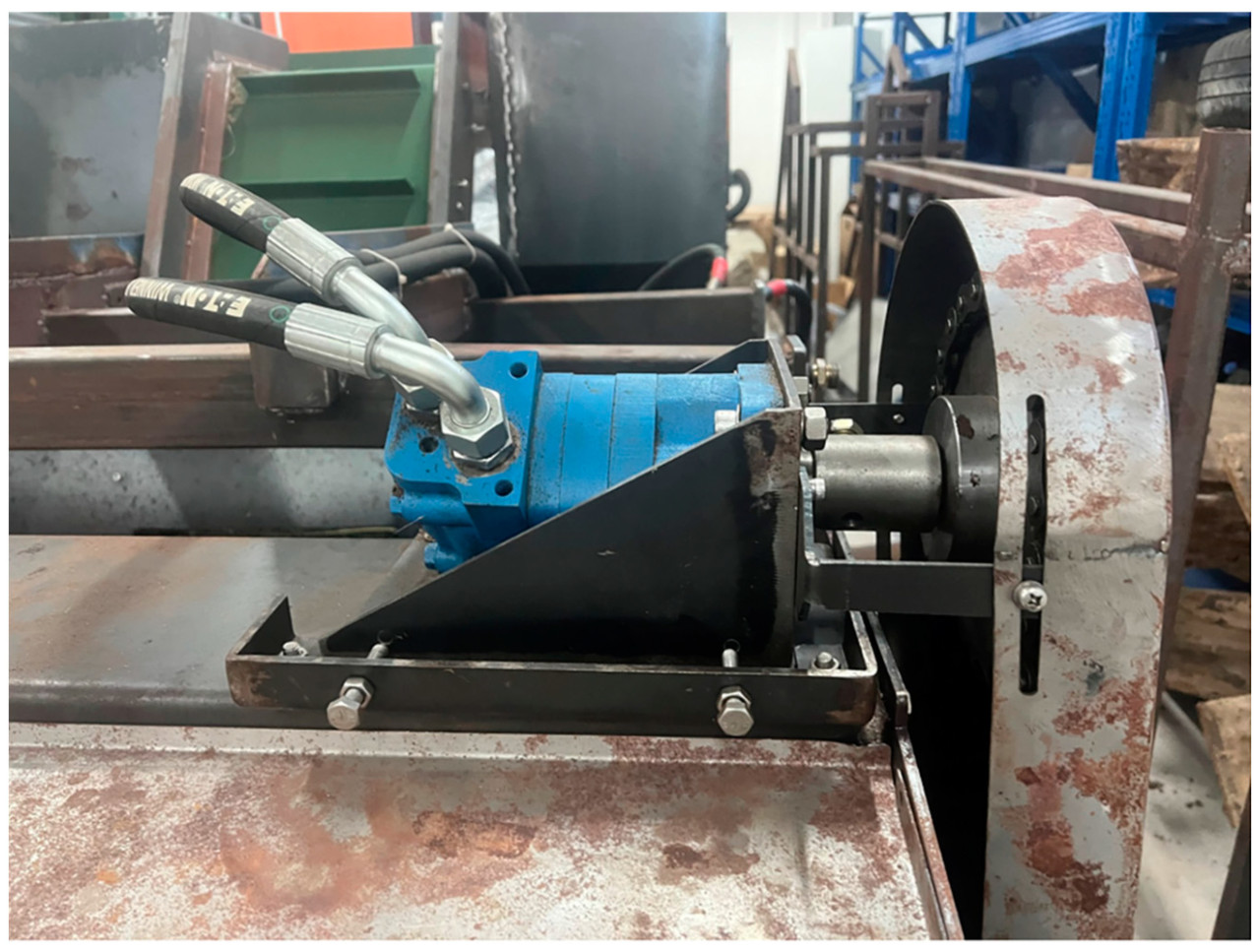
Подставляя соответствующие данные в Уравнение (32), рабочий объем гидравлического мотора барабана рассчитывается как 139,7 мл/об. Выбранная модель мотора — ВМ5-160, с максимальной непрерывной скоростью 430 об/мин, рабочим объемом 160 мл/об и максимальным непрерывным рабочим давлением 17,5 МПа.
Во время процесса уборки листьев полыни ролик движется с постоянной скоростью, поэтому рабочий расход гидравлического мотора определяется следующим уравнением:

где q M— рабочий расход двигателя, л/мин; nt— скорость вращения двигателя, об/мин.
Из этого рабочий расход гидравлического мотора ролика рассчитывается как 33,6 л/мин.
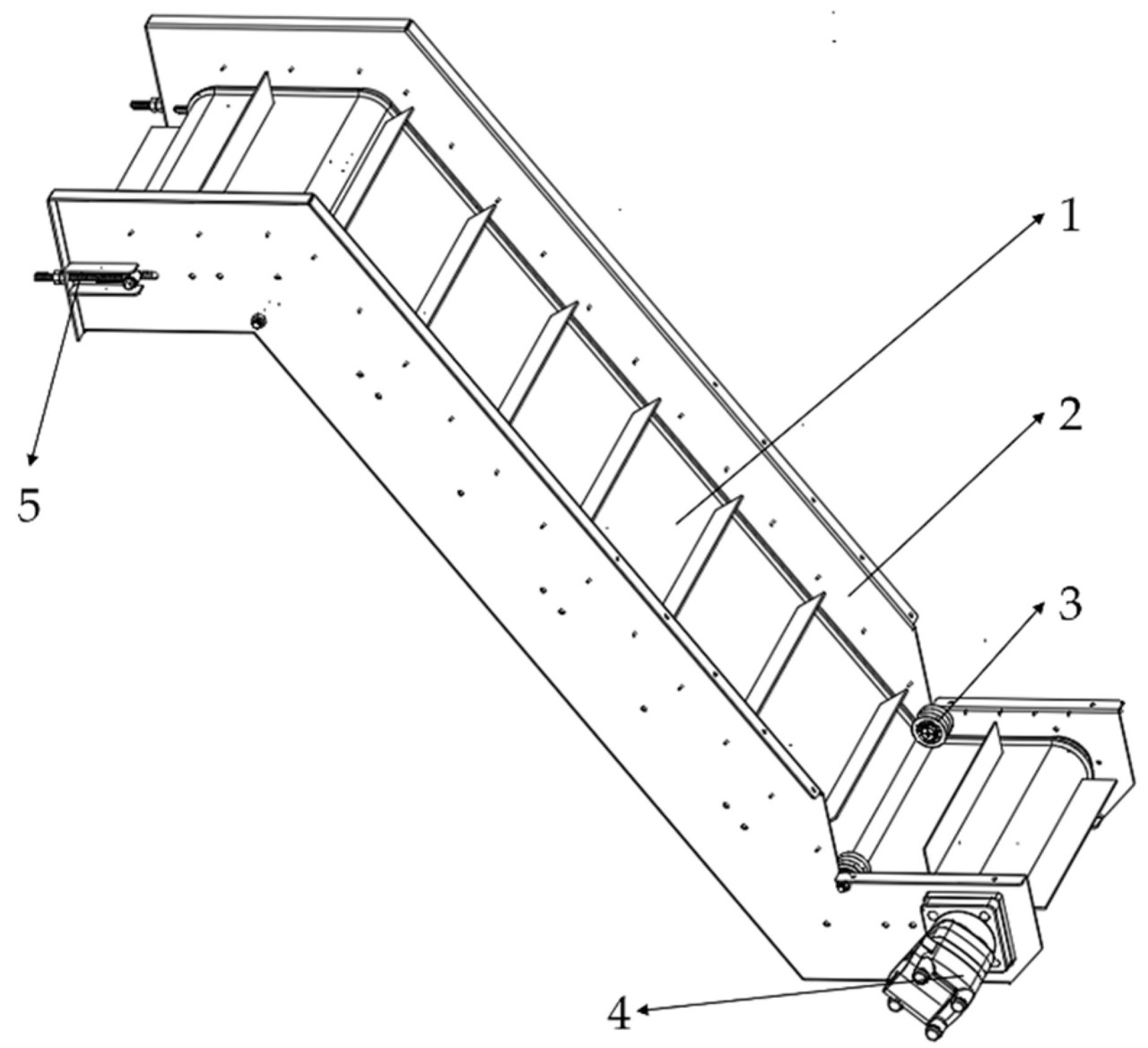
Чтобы обеспечить timely транспортировку большого объема подаваемых листьев полыни в силос без засорения на конвейерном ленточном транспортере и предотвратить чрезмерную ширину подъемного конвейерного ленточного транспортера, влияющую на структуру режущей платформы, машина оснащена левым и правым поперечными конвейерными ленточными транспортерами, как показано на Рисунке 14.
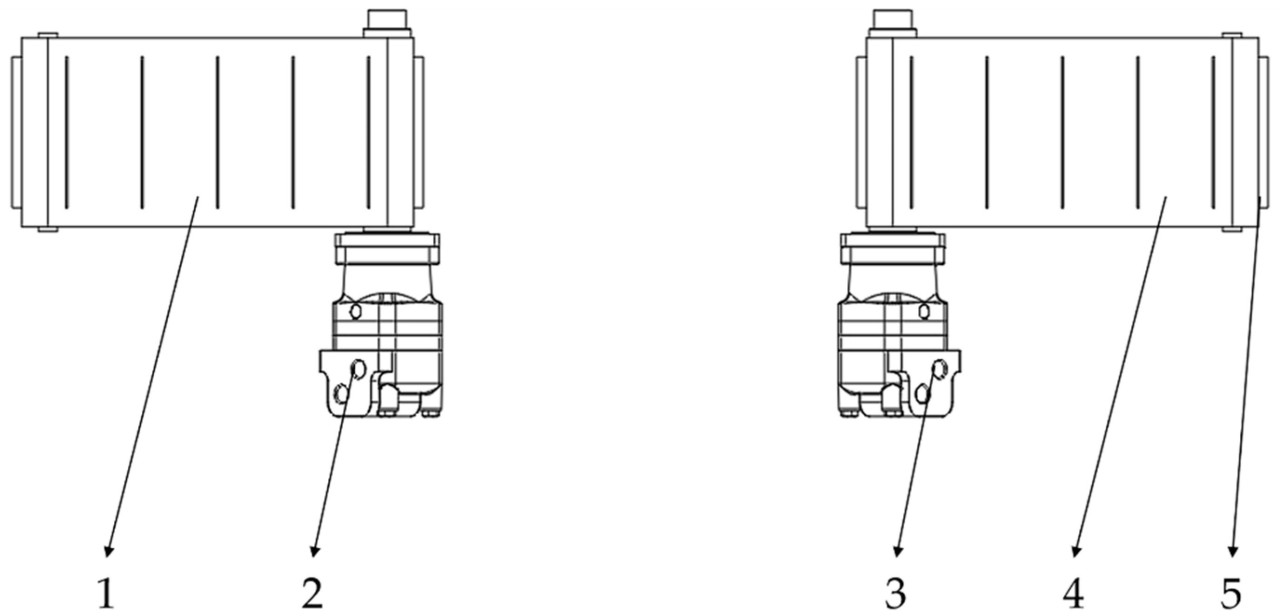
В дизайне и установке гидравлический мотор напрямую соединен с роликом конвейерного ленточного транспортера через муфту. В результате скорость ролика конвейерного ленточного транспортера равна выходной скорости мотора. Согласно требованиям эффективности уборки, скорость конвейерного ленточного транспортера 0,5 м/с считается подходящей. Диаметр ролика конвейерного ленточного транспортера — 50 мм. Скорость ролика поперечного конвейерного ленточного транспортера ns1 задается следующей формулой:

где vs1 — линейная скорость поперечного конвейерного ленточного транспортера, м/с; ds1 — диаметр ролика поперечного конвейерного ленточного транспортера, мм.
Из Формулы (34) скорость конвейерного барабана рассчитывается как 191 об/мин, что означает, что скорость гидравлического мотора конвейерного ленточного транспортера также 191 об/мин. Согласно таблице параметров гидравлического мотора серии ВМ5, крутящий момент мотора — 160 Н·м [31]. Подставляя это в Формулу (32), рабочий объем рассчитывается как 66 мл/об.
Учитывая требования стабильности и гладкости во время работы, выбранная модель мотора — ВМ5-80, с максимальной непрерывной скоростью 850 об/мин, рабочим объемом 80 мл/об и максимальным непрерывным рабочим давлением 17,5 МПа.
Из Формулы (33) рабочий расход гидравлического мотора поперечного конвейера рассчитывается как 15,28 л/мин. Тот же метод расчета используется для другого гидравлического мотора поперечного конвейера, и он не повторяется в этой статье.
Подъемный конвейерный ленточный транспортер использует дизайн с перегородками, как показано на Рисунке 15, с конвейерным ленточным транспортером, поддерживающим специфический угол наклона и скорость относительно направления движения вперед уборочной машины. Чтобы обеспечить гладкий проход листьев полыни, линейная скорость подъемного конвейерного ленточного транспортера должна превышать скорость движения вперед уборочной машины [35]. Скорость спроектированного подъемного конвейерного ленточного транспортера соответствует следующим условиям:

где vs2 — линейная скорость подъемного конвейерного ленточного транспортера, м/с; δ — угол между конвейером и горизонтальным направлением, при этом для всестороннего рассмотрения принято δ= 35° .
Приближая движение конвейерного ленточного транспортера к круговому движению, получаем следующее уравнение:

где ns2 — скорость вращения ролика подъемного конвейерного ленточного транспортера, об/мин; ds2 — диаметр ролика подъемного конвейерного ленточного транспортера, мм.
Подставляя Уравнение (36) в Уравнение (35), получаем:

Подставляя данные, n s2≥ 262 об/мин . Однако чрезмерно большой ds2 может привести к нестабильности в устройстве конвейера, потенциально вызывая вибрацию. Чтобы уменьшить вибрации, ns2 установлен на 262 об/мин. Чтобы повысить продуктивность, скорость подъемного конвейерного ленточного транспортера не должна быть ниже, чем у поперечного конвейерного ленточного транспортера.
Согласно таблице параметров гидравлического мотора серии ВМ5, крутящий момент мотора — 278 Н·м [31]. Подставляя это значение в Уравнение (32), рабочий объем рассчитывается как 121 мл/ об. Выбранная модель мотора — ВМ5-125, с максимальной непрерывной скоростью 522 об/мин, рабочим объемом 125 мл/о б и максимальным непрерывным рабочим давлением 17,5 МПа. Из Уравнения (33) рабочий расход гидравлического мотора подъемного конвейера рассчитывается как 32,75 л/мин.
Во время работы уборочной машины для полыни шток поршня подъемного гидравлического цилиндра сжимается, используя опорный вал передней оси как точку опоры, вызывая медленное опускание платформы и позволяя опорным колесам прилегать к земле для уборки. В то же время высота может регулироваться по мере необходимости. Во внеоперационные времена гидравлический цилиндр поднимает уборочную платформу для облегчения транспортировки.
Основные требования к гидравлическому цилиндру включают достаточную тягу и подходящую скорость подъема для перемещения уборочной платформы вверх и вниз.
Масса уборочной платформы — 400 кг, и тяга Ft, необходимая для каждого гидравлического цилиндра, рассчитывается следующим образом:

где Ft — тяга гидравлического цилиндра, Н; Gc — вес режущей платформы при полной нагрузке, Н; ml — масса орудия режущей платформы, кг; m2 — масса листьев полыни в режущей платформе, принятая как 10 кг; θс — угол между штоком поршня цилиндра и горизонтальной плоскостью при полном выдвижении, 76°.
Формула для расчета внутреннего диаметра гидравлического цилиндра следующая:

где D— внутренний диаметр гидроцилиндра, мм; ΔP 0 — разность давлений между двумя концами гидроцилиндра, МПа, при этом ΔP 0= 8 МПа [36];η 1 — нагрузочный КПД гидроцилиндра; η 0 — общий передаточный КПД гидроцилиндра.
Согласно литературным данным [37], КПД нагрузки гидроцилиндра составляет от 0,6 до 0,75, а общий КПД передачи – от 0,8 до 0,95. В данной работе конструкция принята такой: η 1= 0,65, η 0= 0,85 и F t = 8500 Н. Подстановка данных в уравнение (39) дает внутренний диаметр гидроцилиндра 49,48 мм.
Формула расчета диаметра штока гидравлического поршня:

где dg — диаметр штока гидравлического цилиндра, мм; φ1 — коэффициент скорости гидравлического цилиндра.
Согласно общему давлению гидравлической системы, рабочий коэффициент скорости φ1 гидравлического цилиндра составляет 1,6. Подставляя в Уравнение (40), диаметр гидравлического штока поршня рассчитывается как 30,3 мм.
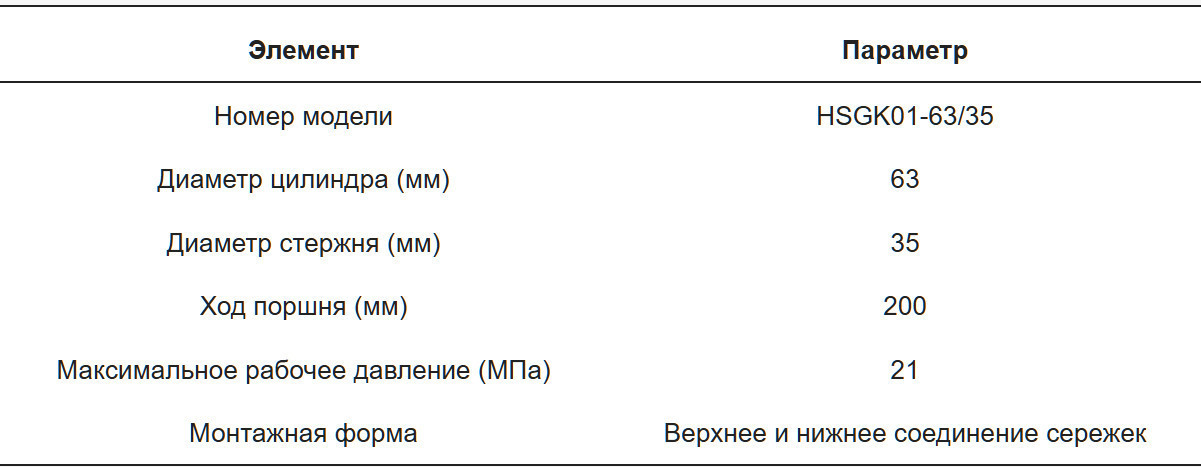
На основе вышеприведенных теоретических расчетов модель гидравлического цилиндра, выбранная в этой статье, — серия HSG, и ее конкретные параметры производительности показаны в Таблице 4.
Согласно литературе [31], чтобы уменьшить инерционный удар, скорость расширения и сжатия vc установлена на 0,12 м/с. Во время процесса подъема и опускания режущей платформы гидравлический цилиндр испытывает максимальную тягу при подъеме. Поэтому необходимо учитывать только расход qc, необходимый для выдвижения штока гидравлического поршня, как следует:

Из Уравнения (41) расход, необходимый для выдвижения гидравлического цилиндра, рассчитывается как 23 л/мин.
Мощность для системных исполнительных механизмов подается гидравлическим насосом [14], который выбирается на основе общего расхода, требуемого в гидравлической системе для исполнительных механизмов уборочной машины для полыни. Поскольку гидравлическая система гусеничного хода независима, ее не нужно учитывать.
Рабочее давление гидравлического насоса задается:

где Рр — рабочее давление гидравлического насоса, МПа; Pm — максимальное рабочее давление контура гидравлической системы; МПа; ∑ΔP — общая потеря гидравлического давления в системном контуре от гидравлического насоса к мотору, гидравлическому цилиндру и другим исполнительным элементам, МПа.
В этой гидравлической системе гидравлический насос напрямую соединен с двигателем через маховик, обеспечивая совпадение его скорости со скоростью двигателя. Учитывая резерв давления и потерю давления в гидравлической системе, выбранное давление установлено в 1,25 раза рабочее давление, с общей потерей давления, рассчитанной как 0,25 раза максимальное рабочее давление. Проектное давление исполнительных элементов уборочной машины для полыни — 16 МПа. Согласно Уравнению (42), рабочее давление насоса рассчитывается как 20 МПа. Учитывая 20% резерв давления, номинальное давление гидравлического насоса выбрано как 24 МПа. Выходной расход гидравлического насоса рассчитывается с использованием следующей формулы:

где Qb — расход гидравлического насоса, л/мин; К — коэффициент утечки потока системы, принятый как 1,1 в этом исследовании; ∑Q max — общий расход, требуемый гидравлической системой исполнительного механизма, л/мин.
Рабочий объем гидравлического насоса рассчитывается с использованием формулы:

где V b — рабочий объем гидравлического насоса, мл/об; nb — номинальная скорость гидравлического насоса, об/мин; η v — общий КПД гидравлического насоса, принятый в данном исследовании равным 0,85.
Из Уравнения (43) расход гидравлического насоса Qb рассчитывается как 146 л/мин. Выбран плунжерный переменный насос Rexroth A10VSO71, с номинальным давлением 24 МПа, максимальной скоростью 2400 об/мин и рабочим объемом 71 мл/об. Подставляя в Уравнение (44), рабочий объем гидравлического насоса рассчитывается как 64,8 мл/об, соответствуя операционным требованиям системы.
Выбор двигателя основан на максимальной выходной мощности всей машины во время работы. Общее потребление мощности в основном включает потребление мощности на движение, потребление мощности гидравлической системы и потребление мощности других рабочих компонентов. Игнорируя влияние сопротивления воздуха, максимальное сопротивление, встречаемое машиной во время движения под полной нагрузкой и равномерной скоростью подъема, задается:

где Fa — сопротивление подъема при полной нагрузке, Н; ml — масса листьев полыни в силосе, кг; f1 — коэффициент сопротивления качению, принятый как 0,10; f2 — коэффициент внутреннего трения, принятый как 0,05; ψ — максимальный угол подъема, принятый как 20°.
Машина была смоделирована с использованием программного обеспечения SolidWorks 2022, и масса полностью заправленной машины получена как примерно 3230 кг с использованием модуля оценки качества. На основе предварительных экспериментальных исследований масса полного силоса во время уборки полыни составляла около 150 кг. Мощность подъема может быть рассчитана как:

где Pα — мощность подъема, кВт; vα — максимальная скорость движения всей машины при максимальном угле подъема, принятая как 5 км/ч.
Во время рабочего процесса уборочной машины давление и расход исполнительной гидравлической системы изменяются динамически, приводя к широкому диапазону вариаций мощности. Поэтому мощность двигателя спроектирована на основе максимальной мощности, требуемой системой. Общая приводная мощность, необходимая для плунжерного переменного насоса, рассчитывается с использованием следующей формулы:

где Pg — приводная мощность гидравлического насоса, кВт; Qb1 — максимальный расход гидравлической системы, принятый как 97 л/мин.
Номинальная мощность двигателя должна соответствовать следующему условию:

На основе расчета номинальная мощность Ре двигателя должна быть как минимум 68,3 кВт. Учитывая необходимость резерва мощности, выбран рядный водоохлаждаемый четырехтактный дизельный двигатель 4G33TC производства Changchai. Его основные параметры следующие: номинальная мощность 74,5 кВт, номинальная скорость 2300-2600 об/мин, общий рабочий объем 3,261 л, максимальный чистый крутящий момент 415 Н·м и чистая масса 280 кг. Схематическая диаграмма шасси с гусеничным приводом показана на Рисунке 16.
5. Полевые эксперименты с уборочной машиной для полыни
Этот эксперимент был проведен на базе посадки полыни, расположенной в уезде Цичунь, город Хуанган, провинция Хубэй, при солнечной погоде. Среднее расстояние между рядами растений полыни на базе посадки составляло 50 мм, с плотностью посадки примерно 400 растений/м2. Среднее содержание влаги в листьях полыни составляло 50,13%, а высота растений варьировалась от 650 до 1450 мм, характерно для типичного режима плотной посадки на сухой земле для культивирования полыни. Экспериментальное поле измеряло примерно 50 м в длину и 35 м в ширину, делая его подходящим для механизированных уборочных операций. Экспериментальное оборудование и инструменты включали уборочную машину для полыни, штангенциркуль, рулетку, бесконтактный цифровой ручной тахометр НТ-4200 и смартфон.
Были выбраны показатели, влияющие на производительность уборочной машины для полыни, для тестирования. Идеально, полные свежие листья требуются во время уборки полыни. Поэтому этот эксперимент выбрал чистую скорость уборки листьев полыни, содержание примесей и пригодность листьев полыни как основные показатели. Эти показатели использовались для оценки рабочей производительности всей машины и качества уборочной операции [38,39,40]. Однако эти выбранные показатели фокусируются в основном на немедленной производительности уборки и могут не полностью учитывать другие факторы, влияющие на общую функциональность уборочной машины. Например, адаптивность машины к разным полевым условиям, таким как вариации рельефа, склоны и плотность урожая, не была включена в это исследование. Эти аспекты представляют важные соображения для будущих исследований для дальнейшего уточнения оценки производительности и расширения практической применимости уборочной машины.
(1) Чистая скорость уборки листьев полыни
Как показано на Рисунке 17, чистая скорость уборки листьев полыни относится к пропорции листьев полыни, отделенных от стебля во время процесса уборки. Измерения были взяты в обозначенной тестовой области, и среднее значение рассчитывалось с использованием следующей формулы:

где S j — чистая норма сбора листьев полыни, %; my — масса чистых листьев полыни в бункере, г; mw — масса остатков листьев полыни на стебле, г.
(2) Содержание примесей
Содержание примесей относится к пропорции примесей, присутствующих в листьях во время процесса уборки. Эти примеси включают сорняки, стебли, ветви и другие не-листовые материалы полыни, как показано на Рисунке 18.
Содержание примесей отражает их чистоту и качество, служа важным показателем для оценки качества продуктов из листьев полыни. Формула расчета следующая:

где Zz — содержание примесей, %; mz — масса примесей в бункере, г; mt — общая масса урожая в бункере, г.
(3) Пригодность листьев полыни
В настоящее время не существует отраслевого стандарта для оценки степени ломкости листьев полыни. На основе критериев оценки, предоставленных сотрудниками компании Qichun Mugwort Planting Company, в данном исследовании собранные листья полыни классифицируются по трем категориям в зависимости от размера листа и степени ломкости, как показано на рисунке 19:
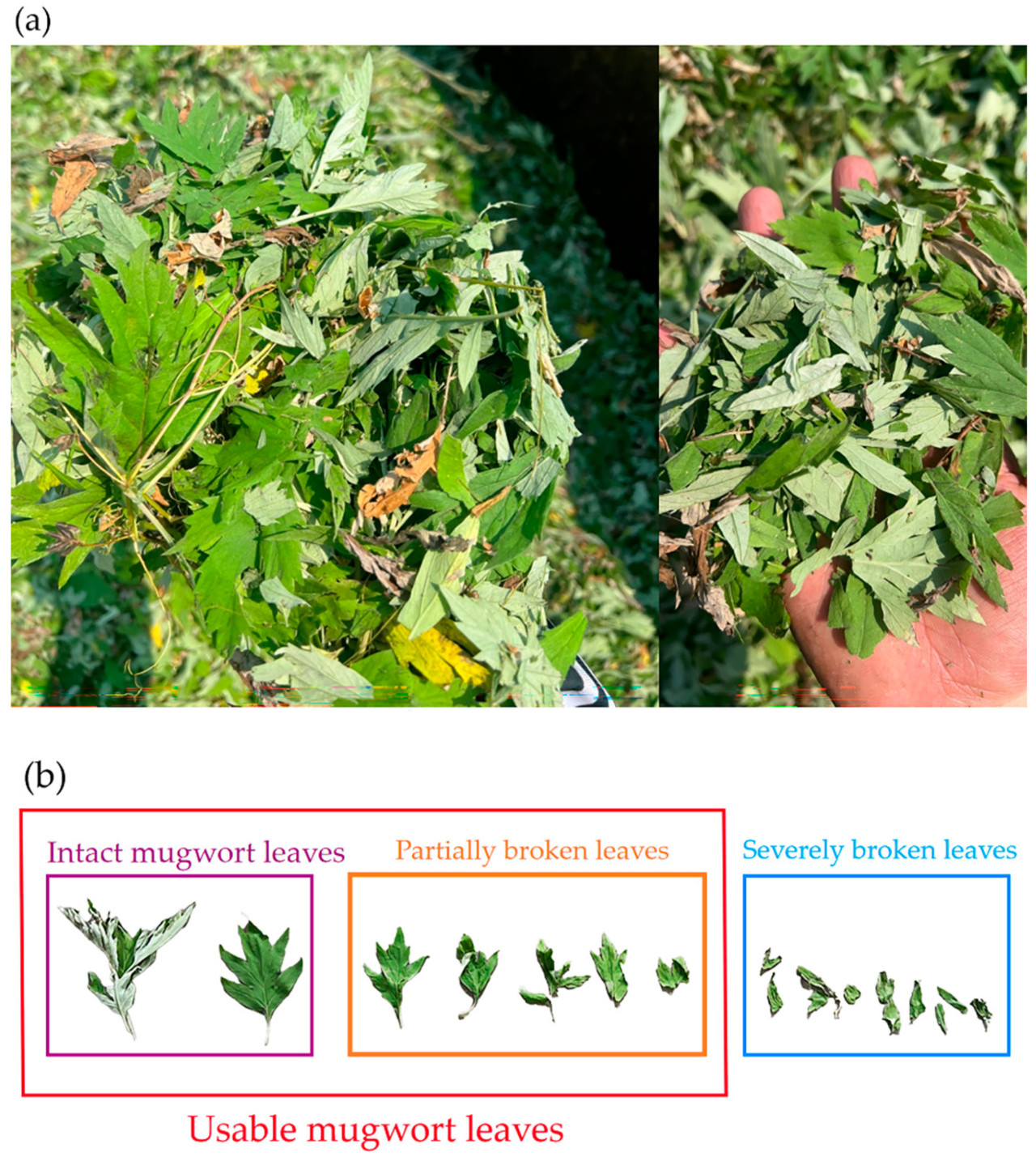
• Полные листья полыни сохраняют свою естественную, полную форму без заметной поломки или разделения.
• Частично поломанные листья демонстрируют незначительные повреждения или расщепления, но остаются в основном целыми.
• Сильно поломанные листья преимущественно фрагментированы в мелкие кусочки или порошок с почти отсутствующими целыми частями.
Полные и частично поломанные листья классифицируются как пригодные, в то время как сильно поломанные листья считаются непригодными. Пригодность листьев полыни рассчитывается с использованием следующей формулы:

где Ps — скорость сильной поломки листьев полыни в бункере, %; Рк — скорость пригодности листьев полыни в бункере, %; mp — масса сильно поломанных листьев в бункере, г.
Чтобы определить оптимальную комбинацию рабочих параметров для уборочной машины, достигающую наивысшей чистой скорости уборки листьев полыни, наименьшего содержания примесей и наивысшей пригодности листьев полыни, был проведен трехфакторный пятиуровневый квадратичный ортогональный ротационный комбинированный регрессионный эксперимент, как показано в Таблице 5. Показатели — чистая скорость уборки листьев полыни, содержание примесей и пригодность листьев полыни — зависят от скорости движения вперед, скорости вращения барабана и высоты режущей платформы. Поэтому был спроектирован ортогональный ротационный комбинированный дизайн эксперимента, ориентированный на эти три фактора.
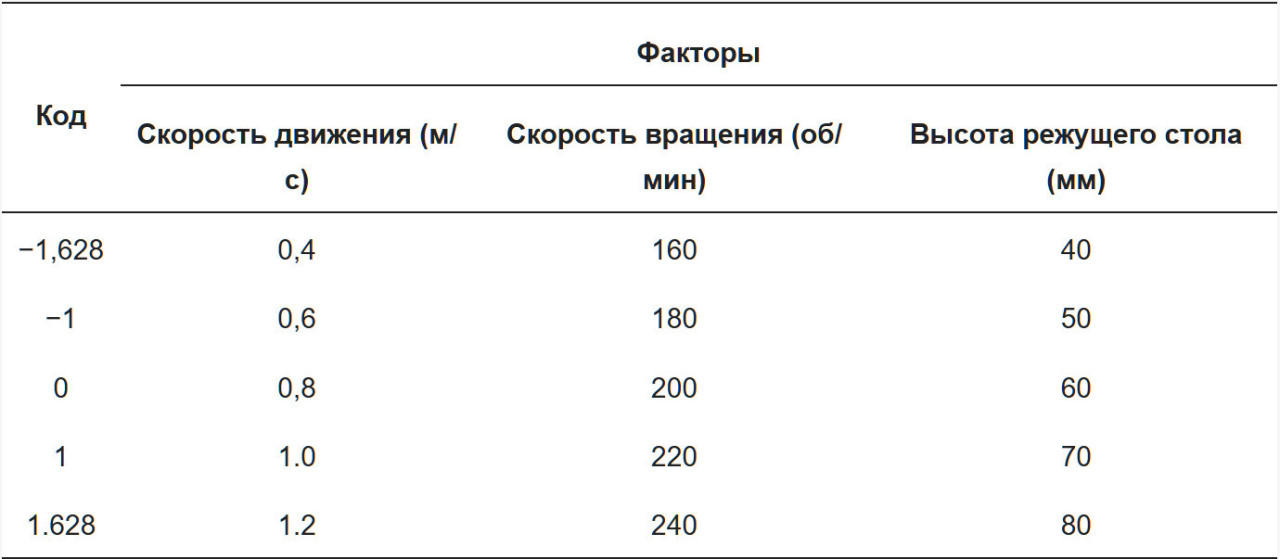
На основе предварительных экспериментов было установлено, что когда скорость движения вперед превышает 1,2 м/с и приближается к 1,5 м/с, больше листьев полыни склонны оставаться на стеблях. Это явление указывает, что при более высоких скоростях время контакта между резаком и стеблями слишком короткое, предотвращая эффективное удаление листьев. Следовательно, это негативно влияет на производительность и эффективность уборки, одновременно увеличивая нагрузку на последующую очистку и обработку. Минимальная скорость движения вперед была установлена на 0,4 м/с, чтобы избежать снижения эффективности уборки, вызванного чрезмерно низкими скоростями. Скорость вращения барабана варьировалась от 160 до 240 об/мин, а высота реза — между 40 и 80 мм. Кодированные уровни для экспериментальных факторов перечислены в Таблице 6, с общим количеством 23 экспериментальных комбинаций.
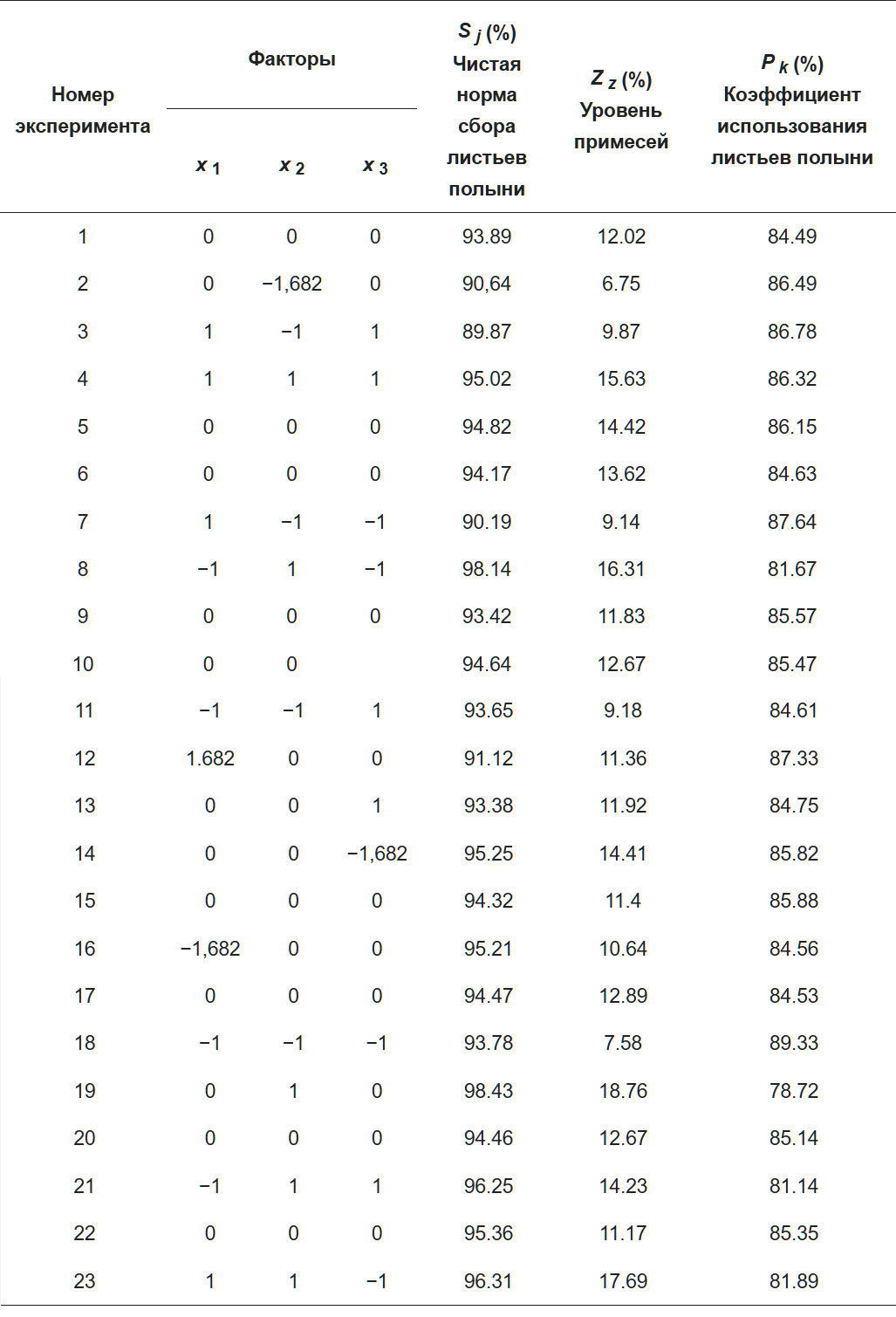
Чистая скорость уборки листьев полыни (Sj), содержание примесей (Zz) и скорость пригодности листьев полыни (Рк) были выбраны как основные индексы оценки. Каждая экспериментальная группа повторялась три раза, и среднее значение использовалось как окончательный результат. Результаты теста представлены в Таблице 6, где х1, х2 и хЗ представляют кодированные значения экспериментальных факторов.
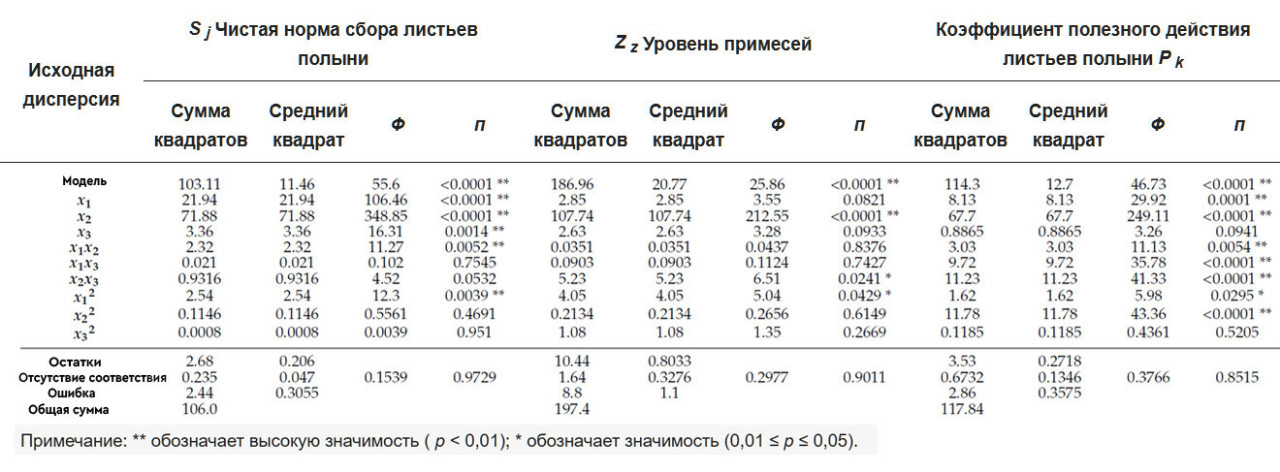
Анализ данных проводился на основе трехфакторного пятиуровневого квадратичного регрессионного ортогонального ротационного тестового дизайна. Регрессионный анализ результатов теста выполнялся с использованием программного обеспечения Design-Expert 13. Анализ дисперсии (ANOVA) регрессионных моделей для результатов теста чистой скорости уборки листьев полыни, содержания примесей и скорости пригодности листьев полыни показан в Таблице 7.
(1) Чистая скорость уборки листьев полыни
Из Таблицы 7 видно, что среди основных факторов значимость влияния на чистую скорость уборки листьев полыни (Sj) уменьшается в следующем порядке: скорость вращения (х2), скорость движения вперед (х1) и высота режущей платформы (хЗ). Влияние скорости вращения на чистую скорость уборки листьев полыни было высоко значимым (р < 0,01), в то время как скорость движения вперед также имела значимое влияние. В противоположность этому, влияние высоты режущей платформы было относительно слабым.
Относительно эффектов взаимодействия, взаимодействие между скоростью движения вперед и скоростью вращения (х1, х2) имело более значимое влияние на чистую скорость уборки листьев полыни. Среди вторичных основных эффектов квадратичный член скорости движения вперед (х12) демонстрировал высоко значимое влияние на чистую скорость. Не значимые члены взаимодействия и вторичные основные эффекты были объединены в остаточный член. После ANOVA уравнение регрессии, описывающее отношение между каждым фактором и чистой скоростью уборки листьев полыни, было получено как:

Вышеприведенное уравнение регрессии было протестировано на несоответствие, как показано в Таблице 7; член несоответствия p= 0,9729 , который не значим (р > 0,1), и тест доказал, что существует значимое квадратичное отношение между показателем и тестовым фактором.
(2) Содержание примесей
Как показано в Таблице 7, экспериментальная модель была высоко значимой (р < 0,01). Среди основных факторов скорость вращения (х2) имела наиболее значимое влияние на содержание примесей. Взаимодействие скорости вращения и высоты режущей платформы (х2, хЗ) также значительно влияло на содержание примесей. Относительно квадратичных основных эффектов квадратичный член скорости движения вперед (х12) имел значимое влияние на содержание примесей.
Сумма квадратов не значимых членов взаимодействия и квадратичных основных эффектов была включена в остаточный член. Не значимые факторы были исключены, и АН OVA была выполнена для получения уравнения регрессии для факторов и содержания примесей, как следует:

Вышеприведенное уравнение регрессии было протестировано на несоответствие, как показано в Таблице 7. Значение несоответствияp= 0,9011 не является значимым (p> 0,1), что указывает на наличие значимой квадратичной связи между индикатором и тестовыми факторами.
(3) Пригодность листьев полыни
Как показано в Таблице 7, экспериментальная модель была высоко значимой (р < 0,01). Среди основных факторов скорость движения вперед (х1) и скорость вращения барабана (х2) демонстрировали высоко значимые эффекты. В терминах эффектов взаимодействия взаимодействия между скоростью движения вперед и высотой режущей платформы (х1, хЗ), скоростью вращения и высотой режущей платформы (х2, хЗ), а также скоростью движения вперед и скоростью вращения (х1, х2) имели высоко значимые влияния на пригодность листьев полыни. Для квадратичных основных эффектов квадратичный член скорости вращения (х22) показывал высоко значимое влияние на пригодность листьев полыни, в то время как квадратичный член скорости движения вперед (х12) демонстрировал значимое влияние.
Сумма квадратов не значимых членов взаимодействия и квадратичных основных эффектов была включена в остаточный член. Не значимые факторы были устранены, и АН OVA была выполнена для получения уравнения регрессии для факторов и пригодности листьев полыни, как следует:

Уравнение регрессии выше было подвергнуто анализу несоответствия, как показано в Таблице 7. Значение несоответствия p= 0,8515 не является значимым (p> 0,1), что указывает на то, что тест подтверждает значимую квадратичную зависимость между индикатором и факторами теста.
Используя программное обеспечение Design-Expert 13, были проанализированы отношения между скоростью движения вперед, скоростью вращения и их комбинированными эффектами на чистую скорость уборки листьев полыни, как показано на Рисунке 20а. График поверхности отклика показывает, что при высоте режущей платформы 60 мм увеличение скорости вращения улучшает чистую скорость уборки листьев полыни. Когда скорость движения вперед постоянна, более высокая скорость вращения приводит к более высокой скорости уборки. Наоборот, при фиксированной скорости вращения увеличение скорости движения вперед снижает скорость. Примечательно, что скорость уборки резко падает, когда скорость движения вперед превышает 0,9 м/с, а скорость вращения ниже 190 об/мин. Эти результаты подчеркивают значимое влияние скорости вращения на скорость уборки при фиксированной высоте реза и скорости движения вперед.
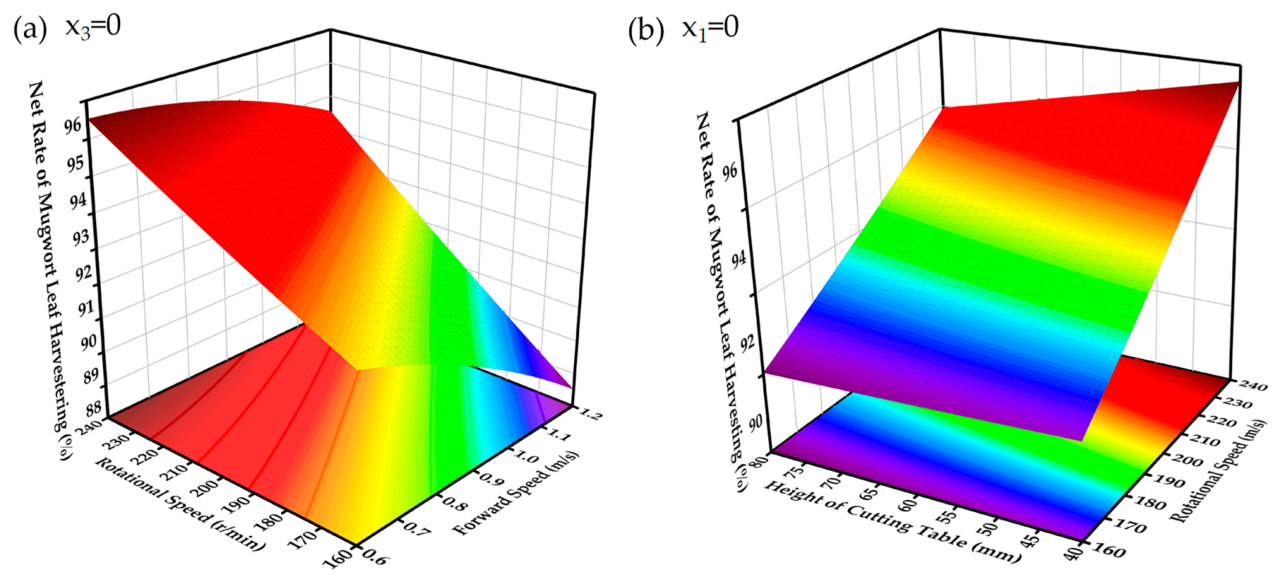
Как показано на Рисунке 20Ь, взаимодействие между высотой режущей платформы и скоростью вращения также влияет на содержание примесей. При низких скоростях вращения высота реза имеет мало влияния на чистую уборку. Однако при более высоких скоростях увеличенная высота реза снижает эффективность из-за уменьшенной эффективности контакта. Это указывает, что хотя высота реза имеет эффект, скорость вращения остается доминирующим фактором, влияющим на скорость уборки.
Полевые тесты показали, что более низкая высота режущей платформы приводит к большему количеству примесей, таких как увядшие листья, во время уборки. Наоборот, более высокая высота реза снижает включение примесей. Неровный рельеф в холмистых районах часто вызывает колебания высоты барабана, и очень низкая высота реза рискует соскребанием земли, что может повредить зубья и нанести вред корневой системе полыни. Чтобы решить эти проблемы, был реализован гидравлический подъемный механизм для регулировки высоты реза в реальном времени. В дизайне высота режущей платформы была оптимизирована на 40 мм для обеспечения эффективной уборки и операционной безопасности для сбора свежих листьев полыни.
Как показано на Рисунках 21а,Ь, Рисунок 21а иллюстрирует взаимодействие между высотой режущей платформы и скоростью вращения на содержание примесей, в то время как Рисунок 21 b изображает взаимодействие между скоростью движения вперед и скоростью вращения на содержание примесей. Оба рисунка указывают, что скорость вращения — основной фактор, влияющий на содержание примесей, в то время как скорость движения вперед имеет минимальное влияние.
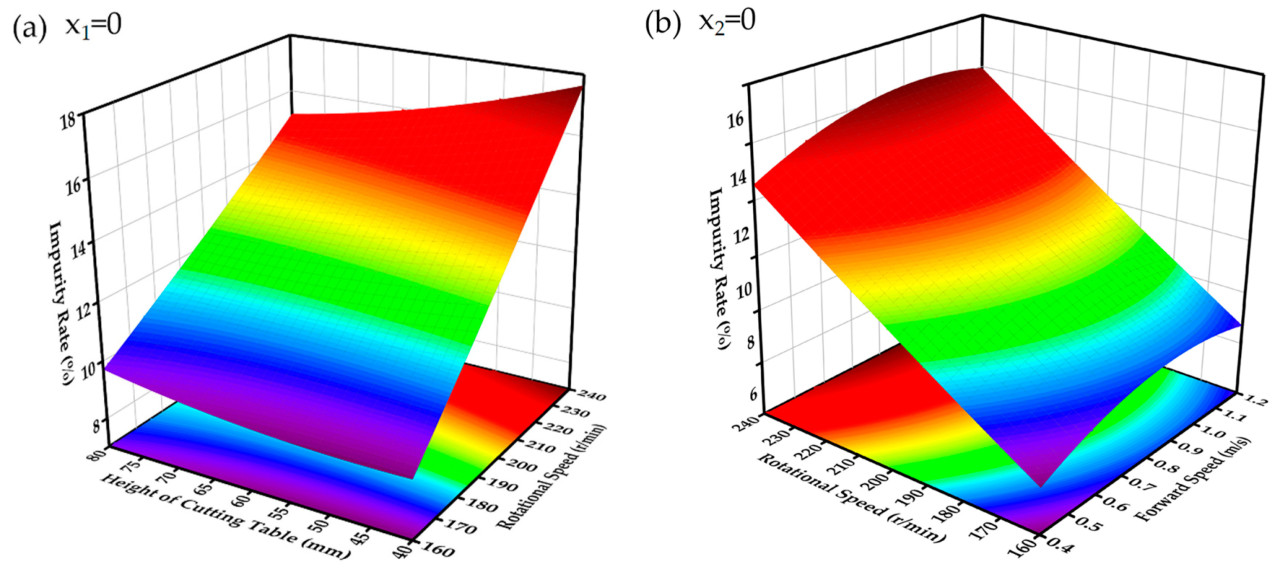
На Рисунке 21а видно, что более высокие скорости вращения в сочетании с более низкими высотами режущей платформы приводят к более высокому содержанию примесей. Это происходит потому, что при постоянной скорости движения вперед более низкая высота реза и более высокая скорость барабана приводят к более частому очищению растений полыни дефолиационными зубьями. Это увеличивает риск поломки ветвей и сбора увядших листьев с основания растения, тем самым повышая уровни примесей.
Чтобы поддерживать низкое содержание примесей, скорость вращения должна тщательно управляться, чтобы избежать крайностей, и высота режущей платформы должна быть установлена на умеренном уровне. Этот сбалансированный подход обеспечивает эффективное удаление листьев, минимизируя включение поломанных ветвей и увядших листьев.
Как показано на Рисунках 22а,Ь, графики поверхности отклика иллюстрируют эффекты различных взаимодействий факторов на пригодность листьев полыни.
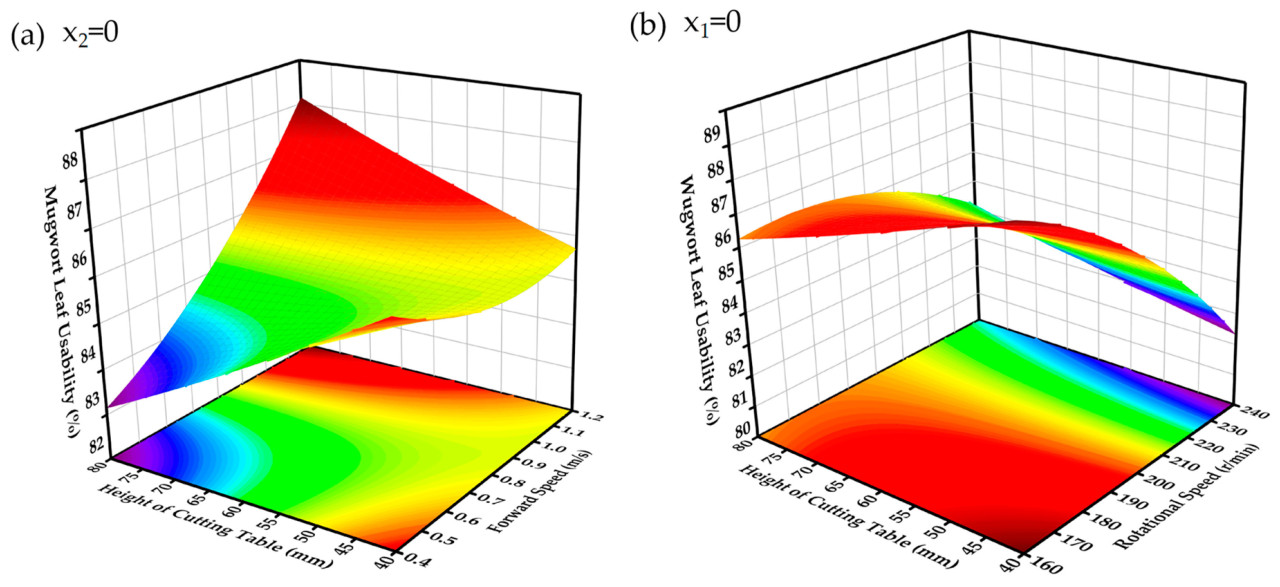
Рисунок 22а показывает взаимодействие между скоростью движения вперед и высотой режущей платформы, раскрывая, что оба фактора значительно влияют на пригодность листьев. Наивысшая скорость пригодности достигается, когда высота режущей платформы поддерживается в пределах 45-55 мм, а скорость движения вперед установлена между 0,7 и 0,9 м/с. Однако когда высота реза слишком низкая или слишком высокая, корректировки скорости движения вперед имеют минимальное влияние, указывая, что высота режущей платформы играет фундаментальную роль в определении общей пригодности.
Рисунок 22Ь иллюстрирует взаимодействие между скоростью вращения и высотой режущей платформы. Скорость вращения имеет значимое влияние на пригодность, с более высокими скоростями, приводящими к резкому снижению. Это происходит из-за увеличенной частоты ударов от дефолиационных зубьев при более высоких скоростях, вызывая большее повреждение листьев полыни. Скорость пригодности уменьшается markedly, когда скорость вращения превышает 200-215 об/мин.
Чтобы минимизировать повреждения и обеспечить более высокую пригодность листьев полыни, скорость вращения должна поддерживаться ниже 215 об/мин. Кроме того, поддержание высоты режущей платформы между 45 и 55 мм и скорости движения вперед в пределах 0,7-0,9 м/с дает оптимальные результаты, максимизируя пригодность при минимизации потерь.
Чтобы определить оптимальные рабочие параметры для скорости движения вперед, скорости вращения и высоты режущей платформы уборочной машины для полыни, был использован модуль оптимизации-числовой в программном обеспечении Design-Expert 13. Процесс оптимизации следовал принципам максимизации чистой скорости уборки листьев полыни, минимизации содержания примесей и повышения пригодности листьев полыни. На основе экспериментальных условий и операционных требований уборочной машины целевая функция и условия ограничений были определены как следует:
Учитывая практические операционные требования уборки полыни, оптимальная комбинация параметров для уборочной машины была определена как: скорость движения вперед 0,8 м/с, скорость вращения 200 об/мин и высота режущей платформы 50 мм. При этих условиях чистая скорость уборки листьев полыни составляла 94,64%, содержание примесей — 12,8%, а пригодность листьев полыни достигала 85,39%.
Полевой тест был проведен в поле посадки полыни в уезде Цичунь, провинция Хубэй, для оценки производительности уборочной машины для полыни. Тестовый сайт и результаты показаны на Рисунках 23а и 23Ь соответственно.
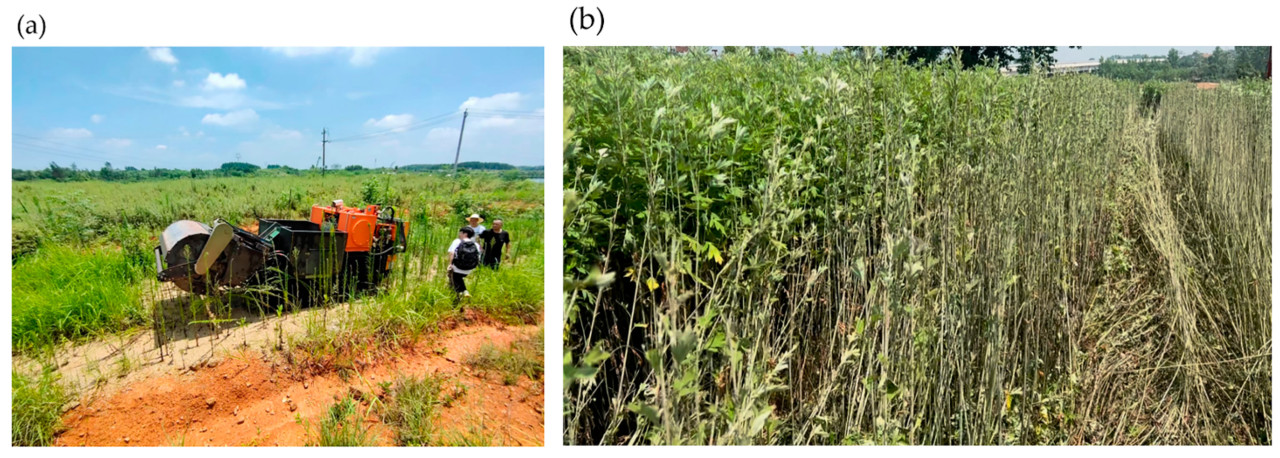
Результаты полевого теста были следующими: эффективность уборки достигала 0,155 га/ч, с чистой скоростью уборки листьев полыни 93,78%, содержанием примесей 13,96% и пригодностью листьев полыни 86,23%, тесно согласуясь с оптимальной комбинацией параметров, предсказанной уравнением регрессии.
В summary, уборочная машина для полыни демонстрировала стабильную производительность, характеризуемую компактной структурой, легкостью эксплуатации, высокой эффективностью и практической полезностью. Эти особенности делают ее высоко подходящей для интегрированных и механизированных операций уборки полыни в Китае, снижая требования к труду и повышая операционную эффективность.
6. Заключения
(1) Это исследование разработало самоходную уборочную машину для полыни, специально предназначенную для холмистых и горных рельефов, чтобы решить проблемы ручной уборки. Уборочная машина интегрирует шасси с гусеничным приводом, устройство для удаления листьев с барабаном с зубьями и гидравлическую систему, с оптимизированными техническими параметрами для повышения эффективности и производительности. Были установлены математические модели для оценки отношений между ключевыми операционными параметрами (скорость вращения, скорость движения вперед, высота режущей платформы) и показателями производительности (чистая скорость уборки, содержание примесей и пригодность листьев полыни). Полевые тесты подтвердили эффективность уборочной машины, достигая чистой скорости уборки 93,78%, содержания примесей 13,96%, скорости пригодности 86,23% и операционной эффективности 0,155 га/ч. Эти результаты подчеркивают способность уборочной машины значительно снижать трудоемкость и повышать продуктивность, поскольку ручная уборка достигает только 0,007 га/ч.
(2) Анализ энергии и затрат показал, что уборочная машина, приводимая в движение дизельным двигателем, потребляет 15,6 л топлива в час при нормальных операционных условиях. Основные факторы затрат включают потребление дизеля и расходы на обслуживание. Эти выводы демонстрируют масштабируемость и коммерческую жизнеспособность уборочной машины для крупномасштабных операций.
(3) Несмотря на свои преимущества, текущий дизайн имеет определенные ограничения. Ручная разгрузка бункера хранения снижает общую эффективность, и уборочная машина собирает только листья полыни, оставляя стебли в поле. Это требует дополнительного оборудования для подготовки поля для уборки стеблей полыни, что, следовательно, увеличивает трудоемкость. Будущие дизайны должны включать автоматизированные системы разгрузки и функциональности для резки или измельчения стеблей для оптимизации рабочего процесса, снижения требований к труду и продвижения устойчивых практик путем возврата органического материала в почву.
(4)Уборочная машина предоставляет значительные экономические и экологические преимущества, улучшая операционную эффективность, снижая затраты на труд и повышая качество собранных листьев для соответствия рыночным требованиям. Однако необходимы дальнейшие исследования для оценки ее адаптивности к разным рельефам, условиям окружающей среды и различным сортам полыни. Кроме того, будущие усилия должны сосредоточиться на улучшении структуры уборочной машины и расширении ее функциональностей для удовлетворения развивающихся требований крупномасштабной механизированной уборки полыни, способствуя устойчивости и модернизации отрасли.
Вклад авторов
Концептуализация, Y.L., Х.Н. и Y.H.; исследование, Y.L., Х.Н. и Y.H.; написание — черновик подготовки, Y.H. и K.Z.; написание — рецензирование и редактирование, Y.H., J.C., S.W. и Y.L.; надзор, Y.L.; управление проектом, Y.L. и Х.Н.; финансирование, Y.L. и Х.Н. Все авторы прочитали и согласились с опубликованной версией рукописи.
Финансирование
Это исследование было финансировано Департаментом сельского хозяйства и сельских дел провинции Хубэй [грант номер: HBSNYT202220] и Ключевой программой исследований и разработок провинции Хубэй [грант номер: 2022ВВА0016].
Заявление о Institutional Review Board
Не применимо.
Заявление о доступности данных
Данные, представленные в этом исследовании, доступны по запросу от соответствующего автора.
Конфликты интересов
Авторы заявляют об отсутствии конфликтов интересов. Финансирующие организации не играли роли в дизайне исследования; в сборе, анализе или интерпретации данных; в написании рукописи; или в решении опубликовать результаты.
Ссылки
1. Зеб, С.; Али, А.; Заман, В.; Зеб, С.; Али, С.; Уллах, Ф.; Шакур, А. Фармакология, таксономия и фитохимия рода полынь, в частности, из Пакистана: всесторонний обзор. Pharm. Biomed. Res. 2018 , 4 , 1–12. [ Google Scholar ] [ CrossRef ]
2. Бишт, Д.; Кумар, Д.; Кумар, Д.; Дуа, К.; Челлаппан, Д.К. Фитохимия и фармакологическая активность рода полынь. Arch. Pharmacal Res. 2021 , 44 , 439–474. [ Google Scholar ] [ CrossRef ]
3. Бора, К. С.; Шарма, А. Род полынь: всесторонний обзор. Pharm. Biol. 2011 , 49 , 101–109. [ Google Scholar ] [ CrossRef ] [ PubMed ]
4. Сиван, Д.; Нандаве, Д.; Нандаве, М. Полынь обыкновенная: обновленный обзор ее многочисленных биологических свойств. Future J. Pharm. Sci. 2022 , 8 , 47. [ Google Scholar ] [ CrossRef ]
5. Nigam, M.; Atanassova, M.; Mishra, AP; Pezzani, R.; Devkota, HP; Plygun, S.; Salehi, B.; Setzer, WN; Sharifi-Rad, J. Биоактивные соединения и польза для здоровья видов полыни. Nat. Prod. Commun. 2019 , 14 , 1–17. [ Google Scholar ] [ CrossRef ]
6. Сан, Й.Дж.; Тянь, Дж.Дж. Исследование применения больших данных в региональных промышленных цепочках поставок. J. Phys. Conf. Ser. 2021 , 1883 , 012167. [ Google Scholar ]
7. Lai, QF; Li, YR; Yao, X.; Liu, B.; Deng, YJ; Hu, SF; Xiao, BG. Исследование механизма удаления листьев гибридной полыни с помощью срезания и трепки. Agric. Technol. Equip. 2021 , 13–14+16. [ Google Scholar ]
8. Сан, С. Н. Экспериментальное исследование факторов, влияющих на качество дефибрации при отрыве полыни. Магистерская диссертация, Хубэйский технологический университет, Ухань, Китай, 2018 г. [ Google Scholar ]
9. Ван, Д. «Конструктивное проектирование и анализ испытаний высокоэффективного полынного дефолиатора». Магистерская диссертация, Хубэйский технологический университет, Ухань, Китай, 2020 г. [ Google Scholar ]
10. Дун, В.Т. Разработка и экспериментальное исследование машины для удаления листьев полыни арги . Магистерская диссертация, Хуачжунский сельскохозяйственный университет, Ухань, Китай, 2022 г. [ Google Scholar ]
11. Чжоу, И.; Хуан, Х.Д.; Чжан, Г.З.; Фан, З.; Сюй, З.Дж.; Вэй, М. Разработка и экспериментальное исследование машины для удаления листьев полыни аргюйской . Chin. Agric. Mech. 2022 , 44 , 197–202. [ Google Scholar ]
12. Лу, Э.; Сюэ, Д.; Чэнь, Т.; Цзян, С. Надежное управление отслеживанием траектории автономного тягача с прицепом с учетом неопределенностей и помех в параметрах модели. Сельское хозяйство 2023 , 13 , 869. [ Google Scholar ] [ CrossRef ]
13. Ван, TB; Ван, HP; Сяо, P.; Луан, YQ; Ли, L. Исследование комплексной среды с использованием гусеничного робота для осмотра подстанций, навигационной платформы с преодолением препятствий. Appl. Mech. Mater. 2013 , 415 , 65–67. [ Google Scholar ] [ CrossRef ]
14. Ван, Ц.; Конг, Ф.; Се, Ц.; Чжан, И.; Сунь, И.; У, Т.; Чэнь, С. Проектирование и испытания гусеничного шасси для щёточно-роликовых хлопкоуборочных машин. Сельское хозяйство 2024 , 14 , 1832. [ Google Scholar ] [ CrossRef ]
15. Ян, «Моделирование динамики системы действия гусеничного транспортного средства ZQ и анализ усталости». Магистерская диссертация, Северный университет Китая, Тайюань, Китай, 2023 г. [ Google Scholar ]
16. Sun, Y.; Xu, L.; Jing, B.; Chai, X.; Li, Y. Разработка четырёхточечного регулируемого подъёмного гусеничного шасси и эксперименты на зерноуборочном комбайне. Comput. Electron. Agric. 2020 , 173 , 105416. [ Google Scholar ] [ CrossRef ]
17. Цзян, Д. Динамическое моделирование шагающего механизма гусеничного экскаватора. Acta Tech. 2017 , 62 , 255–264. [ Google Scholar ]
18. Fan, GJ; Wang, YZ; Zhang, XH. Разработка и эксперимент с подъемной платформой для садов в холмистой местности. Appl. Mech. Mater. 2017 , 865 , 111–117. [ Google Scholar ] [ CrossRef ]
19. Гупта, К.; Тевари, В.К.; Мачаварам, Р. Оценка лабораторного прототипа гребенчатого механизма сбора для комбайна для сбора перца чили. J. Biosyst. Eng. 2022 , 47 , 69–78. [ Google Scholar ] [ CrossRef ]
20. Джамиль, М.В.; Заман, К.Ю.; Шуман, А.В.; Куанг, Т.Н.; Фарук, А.А.; Брюстер, Г.Р.; Чаттха, Х.С. Влияние характеристик растений на эффективность сбора дикой черники комбайном. Appl. Eng. Agric. 2016 , 32 , 589–598. [ Google Scholar ]
21. Фарук, А.А.; Заман, К.Ю.; Грулкс, Д.; Шуман, А.В.; Ярборо, Д.Э.; Нгуен-Куанг, Т. Влияние скорости движения и оборотов жатки на эффективность сбора урожая коммерческой комбайн для уборки дикой черники. Appl. Eng. Agric. 2014 , 30 , 535–546. [ Google Scholar ]
22. Брабандт, Х.; Элерт, Д. Комбайны для сбора ромашки: обзор. Индийский урожай сельскохозяйственных культур. 2011 , 34 , 818–824. [ Академия Google ] [ CrossRef ]
23. Элерт, Д.; Байер, К. Разработка устройств для сбора ромашки. J. Appl. Res. Med. Aromat. Plants 2014 , 1 , 73–80. [ Google Scholar ] [ CrossRef ]
24. Хань, Д.; Чжан, Х.; Ли, Г.; Ван, Г.; Ван, Х.; Чэнь, И.; Чэнь, Х.; Вэнь, Х.; Ян, Ц.; Чжао, Р. Разработка бионического устройства для сбора стручкового перца с высоким уровнем урожая и низким уровнем потерь, а также подробности оптимизации соответствующих рабочих параметров. Сельское хозяйство 2024 , 14 , 859. [ Google Scholar ] [ CrossRef ]
25. Ян, Цз.; Цинь, С.; Лей, Цз.; Лу, Л.; Чжан, Цз.; Ван, Ц. Разработка и эксперимент с гусеничным комбайном для сбора красного перца в холмистых и горных районах. Сельское хозяйство 2024 , 14 , 1742. [ Google Scholar ] [ CrossRef ]
26. Лю, ZY; Цзинь, CQ; Юань, WS; Фэн, YK; Юань, JM. Оптимизация конструкции и эксперимент с пружинным барабанным подборщиком для уборочной машины для сои. Trans. Chin. Soc. Agric. Eng. 2022 , 53 , 171–180. [ Google Scholar ]
27. Цюй, Ц.; Лу, Ц.; Шао, Х.; Лю, Л.; Ван, С.; Лу, Ц. Проектирование и испытания самоходного комбайна для уборки семян одуванчиков. Сельское хозяйство 2023 , 13 , 917. [ Google Scholar ] [ CrossRef ]
28. Ling, J.; Shen, H.; Gu, M.; Hu, Z.; Zhao, S.; Wu, F.; Xu, H.; Gu, F.; Zhang, P. Проектирование и оптимизация системы сбора арахиса для гусеничного комбайна для сбора свежего арахиса. Agriculture 2024 , 14 , 1332. [ Google Scholar ] [ CrossRef ]
29. Ли, Л.; Ли, С.; Ли, Дж.; Вэнь, Б.; Цэнь, Х.; Ван, М.; Ли, И.; Сун, К.; Чжан, З. Разработка и испытание устройства для сбора жимолости с помощью гребёнчатой щётки. Сельское хозяйство 2023 , 13 , 2088. [ Google Scholar ] [ CrossRef ]
30. Ван, Л.; Лю, Ф.; Ван, Ц.; Чжоу, Д.; Фань, Х.; Ли, Д.; Чжао, Х.; Сье, С. Разработка картофелеуборочного комбайна с пружинными пальцами и экспериментальное исследование его производительности. Сельское хозяйство 2023 , 13 , 945. [ Google Scholar ] [ CrossRef ]
31. Брейди, Ф.; Гаррити, Дж.; Ламкес, Дж. Разработка и испытания новых гидравлических насосов/моторов для повышения эффективности сельскохозяйственного оборудования. Trans. ASABE 2017 , 60 , 1809–1817. [ Google Scholar ] [ CrossRef ]
32. Ван, С.; Чжан, Д.; Ху, С.; Лу, Р. Моделирование методом конечных элементов и экспериментальный анализ для эффективной уборки полыни. Сельское хозяйство 2024 , 14 , 1875. [ Google Scholar ] [ CrossRef ]
33. Ризаев А.; Матчанов Р.; Юлдашев А.Т.; Кулдашев Д.А.; Джураева, Н.Б.; Каримов Н.; Ашуров, Н. Хлопкоуборочные комбайны для единоразовой уборки хлопка. Конференция ИОП. Сер. Матер. наук. англ. 2021 , 1030 , 012173. [ Академика Google ] [ CrossRef ]
34. Mei, FW; Zhang, ZY; Li, XD; Zhao, W.; Cao, H.; Zhu, XH. Устройство для распаковки с пружинными зубьями и предотвращения засорения для мульчирующей машины для садовой соломы. Trans. CSAE 2023 , 39 , 25–34. [ Google Scholar ]
35. Ду, Д.Д.; Фэй, Г.К.; Ван, Дж.; Хуан, Дж.Дж.; Ю, Х.Р. Разработка и эксперимент самоходного комбайна для уборки капусты. Trans. CSAE 2015 , 31 , 16–23. [ Google Scholar ]
36. Zhang, ZG; Wang, YC; Li, HQ; Dao, F.; Zhang, ZD; Xue, HT. Разработка и испытание самоходной гусеничной тепличной уборочной машины Panax Notoginseng с гидравлическим управлением. Trans. Chin. Soc. Agric. Eng. 2021 , 52 , 127–135+158. [ Google Scholar ]
37. Ван, Б.С.; Ван, В.З.; Ван, М.С.; Чжун, Д.Ф.; Чэнь, Дж. Проектирование и эксперимент с полногидравлическим гусеничным транспортным средством с высоким клиренсом. Trans. Chin. Soc. Agric. Eng. 2016 , 47 , 471–476. [ Google Scholar ]
38. Shin, SY; Kim, MH; Cho, Y.; Kim, DC. Испытания и оценка производительности барабанного устройства для отделения стеблей комбайна для уборки перца. Appl. Sci. 2021 , 11 , 9225. [ Google Scholar ] [ CrossRef ]
39. Ким, Т.Х.; Ким, Д.К.; Чо, И. Сравнение и оценка производительности двух прототипов небольших комбайнов для сбора перца чили, которые крепятся к шагающим культиваторам. Appl. Sci. 2020 , 10 , 2570. [ Google Scholar ] [ CrossRef ]
40. Чэнь, И.; Ван, Г.; Ван, Д.; Чжан, П.; Ван, Б.; Ху, З. Адаптивность различных уборочных машин к уборке арахиса после срезания стеблей. Int. J. Agric. Biol. Eng. 2022 , 15 , 93–101. [ Google Scholar ] [ CrossRef ]
Design and
Performance Evaluation of a Self-Propelled Mugwort Harvester for Hilly and
Mountainous Regions
by Yi Li1,
Yongsheng He1, Kai Zhang1, Siqi Wang1,2, Xinyu
Hu1 and Junnan Chen1
1
School of Mechanical Engineering, Hubei University of Technology, Wuhan
430070, China
2
School of Mechanical Engineering, Hubei Engineering University, Xiaogan
432000, China
Перевод статьи «Design and Performance Evaluation of a Self-Propelled Mugwort Harvester for Hilly and Mountainous Regions» авторов Yi Li, Yongsheng He, Kai Zhang, Siqi Wang, Xinyu Hu and Junnan Chen, оригинал доступен по ссылке. Лицензия: CC BY. Изменения: переведено на русский язык

















































































































Комментарии (0)