Ключевые технологии интеллектуального рецептурного опрыскивания для борьбы с вредителями, болезнями и сорняками: обзор ключевых технологий
В современном сельском хозяйстве защита растений является ключевым элементом обеспечения здоровья сельскохозяйственных культур и повышения урожайности. Технологии интеллектуального рецептурного опрыскивания пестицидами (ИРОП) осуществляют мониторинг, диагностику и принятие научно обоснованных решений по вредителям, болезням и сорнякам; разрабатывают персонализированные и точные планы борьбы с ними; и проводят профилактику и уничтожение вредителей с помощью интеллектуального оборудования. В данном исследовании рассматриваются ключевые технологии ИРОП с четырёх точек зрения: сбор информации о цели, обработка информации, рецептурное опрыскивание пестицидами, а также реализация и управление.
Аннотация
В разделе сбора информации о цели представлены технологии идентификации целей на основе изображений, дистанционного зондирования, акустических волн и электронного носа. В разделе обработки информации рассматриваются такие методы, как предварительная обработка информации, извлечение признаков, идентификация вредителей и болезней, биоинформатический анализ и работа с данными временных рядов.
В разделе рецептурного опрыскивания пестицидами исследуется влияние выбора пестицида, расчёта дозы, времени и способа опрыскивания на конечный эффект, а также формирование рецептуры опрыскивания для конкретной территории. В разделе реализации и управления изучаются технология автоматического управления машиной, технология точного опрыскивания, технология контроля характеристик капель и их применение.
Кроме того, в данном исследовании обсуждаются перспективы будущего развития технологий ИРОП, включая многофункциональные системы сбора информации о целях, системы поддержки принятия решений на основе генеративного ИИ и разработку прецизионных интеллектуальных опрыскивателей. Развитие этих технологий позволит повысить производительность сельского хозяйства более эффективным и экологически устойчивым образом.
1. Введение
Контроль за вредителями, болезнями и сорняками в современном сельскохозяйственном производстве является ключевым для обеспечения здорового роста культур и повышения урожайности и качества продукции. С изменениями в экологической среде и непрерывным прогрессом в сельскохозяйственном производстве типы вредителей, болезней и сорняков, а также закономерности их возникновения также меняются, что создает новые проблемы. Хотя опрыскивание пестицидами остается наиболее эффективной и важной мерой борьбы с вредителями, болезнями и сорняками, применение химических пестицидов может вызывать загрязнение окружающей среды и приводить к остаткам пестицидов в сельскохозяйственной продукции.
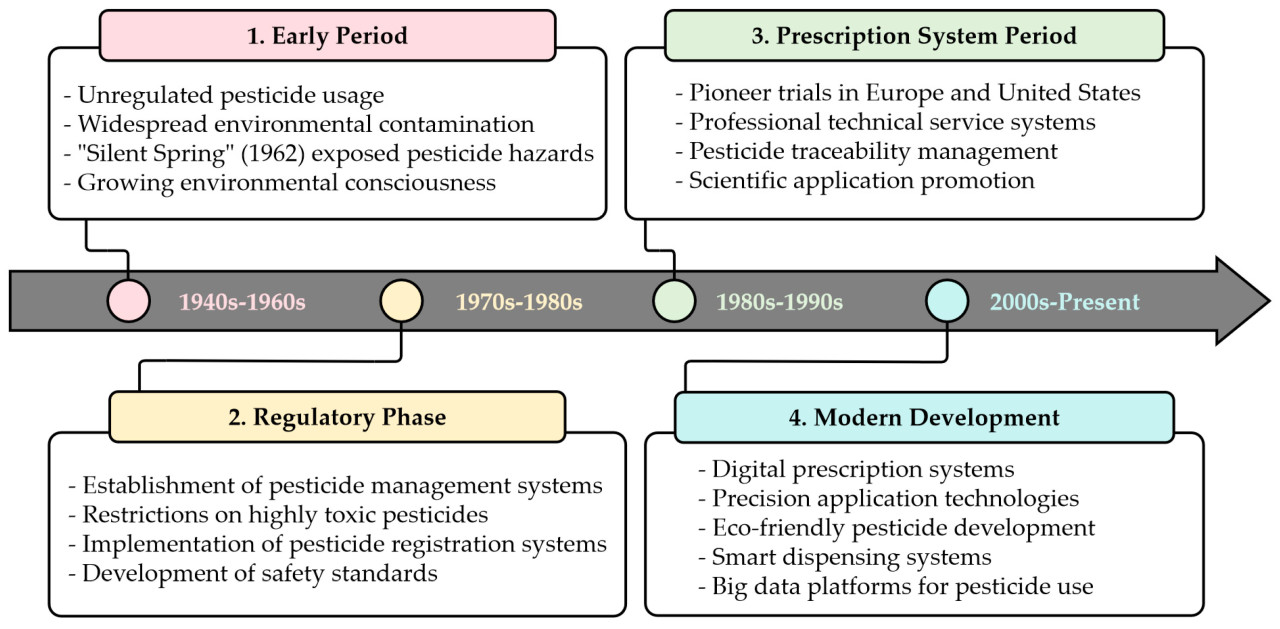
Исследования и применение ключевых технологий интеллектуального предписывающего распыления пестицидов (ИПРП) имеют важное значение для повышения эффективности и точности контроля за вредителями, болезнями и сорняками. Эти технологии включают междисциплинарную интеграцию таких областей, как современные информационные технологии, биотехнологии, механическое и электронное машиностроение, ботаника и наука о пестицидах. Быстрое развитие технологий, таких как Интернет вещей (IoT), большие данные и искусственный интеллект (ИИ), также способствовало значительному прогрессу в исследованиях и применении технологий ИПРП. Временная шкала развития ИПРП показана на Рисунке 1. Эта технологическая эволюция преобразовала технологии ИПРП от простых механических применений до современных, сложных, интегрированных систем, которые объединяют множество технологий для точного, эффективного и экологически безопасного управления вредителями.
Интеллектуальный мониторинг относится к автоматизированному и непрерывному наблюдению за сельскохозяйственными условиями с использованием передовых технологий, включая сенсоры и системы анализа данных. С помощью технологий дистанционного зондирования и беспилотных летательных аппаратов интеллектуальный мониторинг сельскохозяйственных угодий может предоставлять информацию в реальном времени о возникновении и развитии вредителей, болезней и сорняков. Технологии больших данных и искусственного интеллекта используются для анализа закономерностей и тенденций в возникновении вредителей, болезней и сорняков, обеспечивая тем самым научную основу для принятия решений по контролю. ИПРП должно быть точно согласовано с целью и минимизировать побочные эффекты для здоровья человека, нецелевых организмов и окружающей среды путем избежания чрезмерных доз, сокращения частоты применения или использования дробных применений. Важно, чтобы связанный риск для растительности оставался приемлемым и не увеличивал риск развития резистентности в популяциях вредных организмов [1].
В то время как предыдущие исследования внесли значительный вклад в отдельные аспекты технологий ИПРП, в существующей литературе остаются несколько важных пробелов. Во-первых, большинство исследований сосредоточено на отдельных технологических компонентах (таких как распознавание изображений и системы распыления), а не на комплексном анализе всей интеграции системы ИПРП. Во-вторых, существует ограниченный систематический анализ того, как различные технологии взаимодействуют и дополняют друг друга в рамках ИПРП. В-третьих, в существующих обзорах часто не хватает детального обсуждения практических проблем внедрения технологий ИПРП в различных сельскохозяйственных контекстах. В-четвертых, недостаточное внимание уделялось интеграции новых технологий, таких как генеративный ИИ и граничные вычисления, в системы ИПРП. Наконец, в предыдущих исследованиях не уделялось адекватного внимания тому, как технологии ИПРП могут быть оптимизированы для различных масштабов сельскохозяйственных операций, от небольших ферм до крупных коммерческих предприятий. Данное исследование направлено на устранение этих пробелов путем комплексного анализа технологий ИПРП с точки зрения системного уровня, изучая технологическую интеграцию и проблемы практической реализации.
Данное исследование фокусируется на ключевых технологиях ИПРП для борьбы с вредителями, болезнями и сорняками, включая технологию интеллектуального мониторинга; точную диагностическую технологию для вредителей, болезней и сорняков; технологию интеллектуального принятия решений; и передовую технологию применения пестицидов. Цель состоит в том, чтобы разработать персонализированные и точные программы контроля, которые обеспечивают научные, эффективные и экологически устойчивые решения для управления вредителями, болезнями и сорняками в сельскохозяйственном производстве. Анализируя и обобщая эти ключевые технологии, мы надеемся предоставить более точные и интеллектуальные стратегии борьбы с вредителями и сорняками для сельскохозяйственного производства, чтобы сельское хозяйство могло стать более экологичным, умным и эффективным. Используя передовое оборудование для применения для реализации комплексного набора технических систем, технологии ИПРП заметно улучшают эффективность и действенность борьбы с вредителями, болезнями и сорняками, сокращают остатки пестицидов, защищают экологическую среду, снижают затраты на сельскохозяйственное производство и увеличивают доходы фермеров.
Внедрение технологий ИПРП по-прежнему сталкивается с несколькими значительными проблемами. К ним относятся проблемы масштабируемости при развертывании на больших сельскохозяйственных площадях, существенные первоначальные инвестиционные затраты на оборудование и инфраструктуру, а также потенциальные экологические проблемы, такие как электромагнитные помехи от сенсоров и электронных устройств. Кроме того, сложность интеграции нескольких технологий и необходимость специального обучения фермеров создают практические проблемы для широкого внедрения. Понимание и решение этих проблем имеют решающее значение для внедрения технологий ИПРП в современном сельском хозяйстве. Поэтому данное исследование предлагает будущие направления исследований для технологии ИПРП.
2. Анализ процесса ИПРП и ключевых технологий
Рисунок 2 иллюстрирует логическую последовательность предписывающего распыления пестицидов. Во-первых, необходимо получить соответствующую информацию о целевом растении (изображения, спектральная информация, акустические сигналы и т.д.). Во-вторых, соответствующие данные должны быть предварительно обработаны для улучшения качества и количества. В-третьих, следует использовать техники анализа информации для обработки предварительно обработанных данных и определения классификации и серьезности поражения целевого растения вредителями и болезнями. В-четвертых, предписания для распыления пестицидов (применение, дозировка и меры предосторожности) должны быть разработаны на основе защитных механизмов растения и данных о прошлых заболеваниях. В-пятых, чтобы обеспечить точное достижение распылителем designated location и самостоятельное выполнение задачи распыления, они должны интегрировать навигационное позиционирование с технологией автономного вождения. Наконец, необходимо применять различные техники точного распыления пестицидов для повышения эффективности и сокращения использования пестицидов.
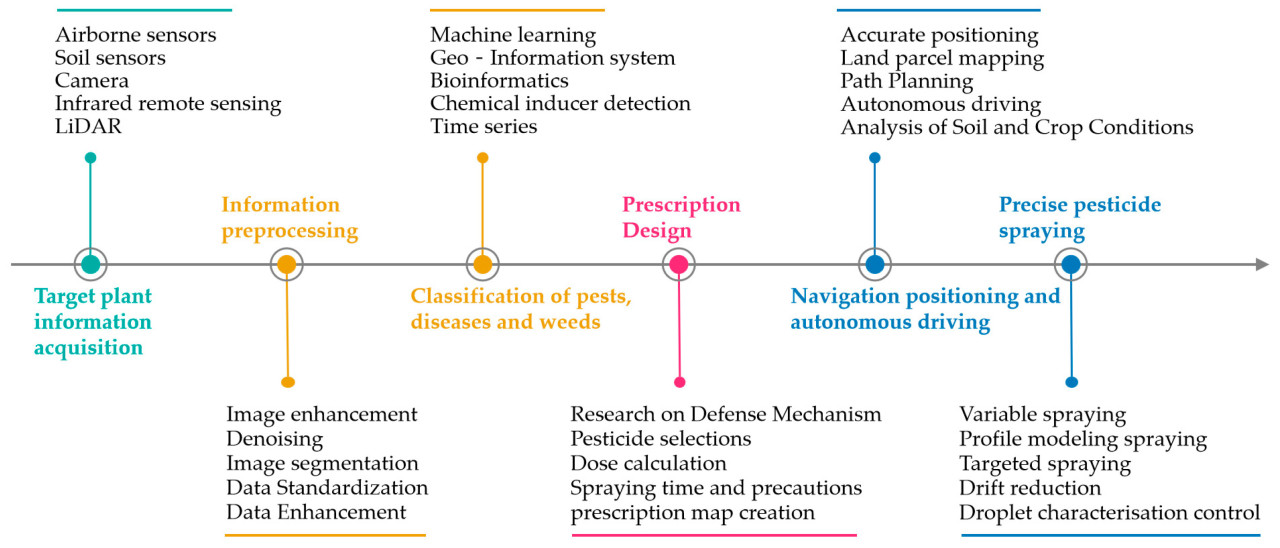
Рисунок 2. Логическая схема последовательности для технологий ИПРП
Анализируя логическую схему последовательности и ключевые технологии ИПРП для борьбы с вредителями, болезнями и сорняками, мы заключаем, что технологии ИПРП должны включать четыре уровня, как показано на Рисунке 3. Первый уровень — это уровень сбора целевой информации. Этот уровень использует инструменты сбора информации, такие как изображения и спектры, для получения информации о пологе и состоянии здоровья целевых растений. Второй уровень — уровень обработки информации. Этот уровень улучшает качество и количество данных и получает соответствующие параметры характеристик с помощью различных техник предварительной обработки и анализа информации. Он также объединяет биоинформатику, молекулярную биологию и другие технологии для комплексного анализа категорий, распределения и серьезности вредителей, болезней и сорняков. Третий уровень — уровень предписывающего распыления пестицидов. Этот уровень основан на типе, распределении и серьезности вредителей, болезней и сорняков, используемых для формулирования предписания. Он направлен на достижение специализированной обработки конкретных вредителей и точного распыления пестицидов. В то же время этот уровень также создает базы данных, включая информацию о вредителях и сорняках и данные классификации пестицидов. Эти базы данных обеспечивают поддержку данных для модели распыления пестицидов и гарантируют, что генерируемые предписания являются научно обоснованными. Четвертый уровень — уровень реализации и контроля, который может реализовать точные on-target техники распыления пестицидов с переменным расходом на основе карты предписаний, сгенерированной из целевой информации, такой как объем и плотность полога растений.
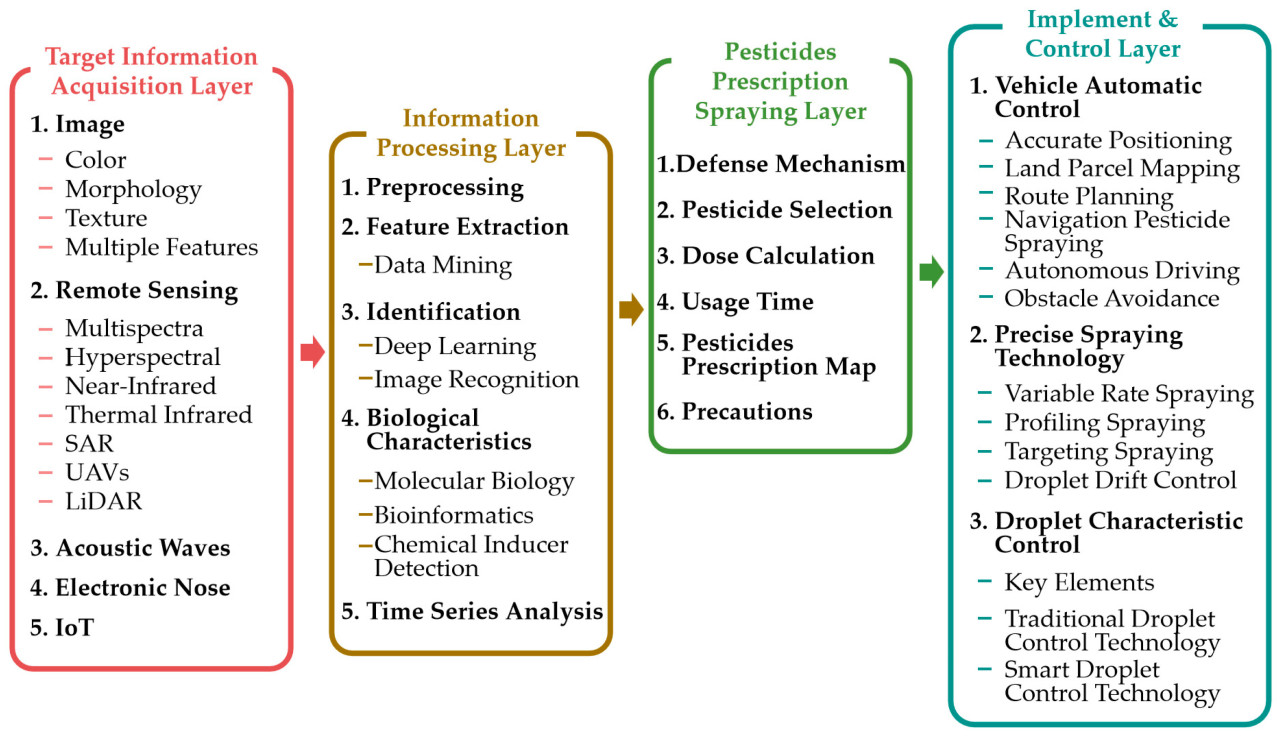
Рисунок 3. Ключевые технологии в технологиях ИПРП
3. Уровень сбора целевой информации
Уровень сбора целевой информации включает обычные системы сбора целевой информации, такие как машинное зрение, дистанционное зондирование, акустические волны и электронный нос, а также платформы-носители для различных устройств сбора целевой информации. Транспортные средства являются наиболее традиционными носителями устройств для сбора изображений и спектральной информации из-за их относительно низкой стоимости, универсальности в различных условиях и значительных возможностей расширения [2], позволяя интегрировать датчики скорости, расхода и давления [3], а также лазерные датчики [4]. Системы дистанционного зондирования состоят из платформ дистанционного зондирования, сенсоров, устройств передачи информации, оборудования для цифровой или изображенческой обработки и других связанных технологий [5]. По сравнению с традиционными платформами мониторинга спутникового дистанционного зондирования, БПЛА могут работать на более низких высотах (80–400 м), компенсировать воздействие экстремальной погоды и облачного покрова [6], достигать быстрого и точного получения высокоточных изображений [7,8,9] и продвигать сельскохозяйственное производство в направлении превосходного качества, эффективности, безопасности, информатизации и интеллектуализации [10]. Это позиционирует БПЛА как crucial инструмент для крупномасштабного мониторинга вредителей, болезней и сорняков в будущем [11].
3.1. Технология сбора целевой информации на основе изображений
Для достижения точности и надежности точного распыления пестицидов необходимо целенаправленно получать соответствующую информацию о повреждении растений для идентификации и локализации вредителей, болезней и сорняков. Растения поражаются разными вредителями, болезнями и сорняками в разные периоды роста. Поэтому необходимо собирать наборы изображений целевых растений, восприимчивых к вредителям, болезням и сорнякам в разные периоды, и адекватно обучать модель, чтобы улучшить способность к обобщению и построить модель, которая может точно идентифицировать различных вредителей, болезней и сорняков. Мимикрирующие сорняки и несколько растений проявляют сходства в цвете и внешнем виде, что делает стандартные методы неадекватными для достижения высокой точности распознавания. Поэтому технологии сбора целевой информации на основе изображений необходимо повышать точность различения культур и сорняков с помощью различных алгоритмов, даже после сбора изображений области.
Технология захвата изображений приобретает высококачественные изображения с помощью различного оборудования и методов, которые просты и удобны в эксплуатации и могут обеспечить сильную техническую поддержку для ранней идентификации и точного контроля вредителей, болезней и сорняков. Обычно используемые устройства включают цифровые камеры, камеры высокого разрешения, устанавливаемые на БПЛА [12], автоматическое камерное оборудование, закрепленное в поле, и высокоточное сканирующее оборудование. Цифровые камеры и закрепленное камерное оборудование обычно имеют высокое разрешение и хорошую чувствительность и подходят для работы в различных погодных и световых условиях. Съемка при достаточном освещении и захват изображений с разных углов и расстояний позволяет получить четкую и комплексную информацию для поддержки последующего анализа изображений и идентификации вредителей, болезней и сорняков. БПЛА, оснащенные камерами высокого разрешения, гибки и способны быстро перемещаться, что делает их подходящими для крупномасштабного захвата изображений. БПЛА могут делать снимки на разных высотах и углах, предоставляя данные изображений с нескольких точек зрения и способствуя точному земледелию. Высокоточное сканирующее оборудование в основном используется для сканирования таких целей, как листья пораженных растений, для получения изображений с высоким разрешением. Процесс сканирования должен обеспечивать равномерное освещение, чтобы избежать отражений или теней, влияющих на качество изображения [13,14,15,16,17]. Типы оборудования включают стационарные сканеры, портативное сканирующее оборудование и сканирующее оборудование для БПЛА.
3.1.1. Цвет
После того как некоторые растения заболевают, они производят пятна болезни, которые отличаются по цвету от самих растений [18], и цвет сорняков часто отличается от цвета культур. Поэтому после сбора изображений больных и здоровых растений (или сорняков и культур) можно судить, заболела ли культура, или идентифицировать сорняки, сравнивая RGB (Красный, Зеленый, Синий) или HSB (Тон, Насыщенность, Яркость) компоненты разных изображений.
Например, когда огурец растет нормально, на переднем крае стебля и листьев есть белая горизонтальная линия, а поверхность листьев имеет форму зазубренного треугольника. Когда огурец страдает от мучнистой росы, начальный цвет листьев варьируется от белого до серовато-белого, а в тяжелых случаях весь лист увядает. Когда он страдает от пятнистости листьев, на поверхности листа можно наблюдать желтоватые или серовато-белые пятна [19]. В то время как БПЛА обычно не используются в тепличных условиях, где часто выращивают огурцы, из-за изменения климата, стационарные или портативные системы визуализации могут эффективно контролировать здоровье растений.
3.1.2. Морфология
Когда растения подвергаются атаке различных вредителей, болезней и сорняков в разные периоды роста, на листьях появляются пятна разной формы и размера, которые можно анализировать, сравнивая их с нормальными листьями, чтобы выяснить, какими болезнями страдают растения или какие вредители их поражают.
3.1.3. Текстура
Идентификация вредителей и болезней на основе текстуры сочетает обработку изображений, анализ текстуры и методы машинного обучения для идентификации и классификации вредителей и болезней путем анализа текстурных особенностей на поверхности растений или вредителей.
Например, гребенчатые щетинки на дорсальной пластине брюшка *Zeugodacus cucurbitae* (Coquillett) являются ключевыми текстурными особенностями, которые могут быть распознаны с помощью машинного зрения и техник обработки изображений, чтобы обеспечить основу для борьбы с вредителями [20]. Текстурные характеристики целевых растений могут быть извлечены путем предварительной обработки и сегментации изображений, а затем обнаружены с помощью модели случайного леса, что может решить проблемы низкой точности, переобучения и высокого уровня ошибок [21].
3.1.4. Множественные особенности
Идентификация вредителей, болезней и сорняков на основе множественных особенностей — это комплексный подход, который использует несколько особенностей данных и передовые техники машинного обучения для повышения точности и эффективности идентификации. Этот процесс сочетает обработку изображений, анализ данных сенсоров и модели глубокого обучения, используя несколько сенсоров (например, RGB-камеры, тепловизоры и спектральные камеры) для захвата различных типов данных, из которых извлекаются множественные особенности, такие как цвет, форма, текстура и спектр. Эти данные объединяются в комплексный набор признаков и впоследствии подаются в модели глубокого обучения (например, сверточные нейронные сети (CNN)) или другие алгоритмы (например, случайный лес и машины опорных векторов) для обучения. Обучаясь на большом количестве размеченных данных, эти модели могут идентифицировать и классифицировать различные вредители, болезни и сорняки более комплексно и точно, обеспечивая таким образом более эффективную поддержку решений для интегрированной защиты растений (IPM).
Например, цвет и форма червоточин могут быть одновременно проанализированы как параметры признаков, а отношение площади возникновения вредителей к площади листа может быть определено как индекс для определения серьезности повреждения насекомыми для достижения точного определения вредителей и предоставления ссылки для точного распыления пестицидов [22]. Алгоритм цветовой разности также может быть использован для изоляции пораженной области целевого растения, и болезни могут быть классифицированы путем объединения цветовой гистограммы и текстурных признаков [23].
3.2. Технология сбора целевой информации на основе дистанционного зондирования
Как показано на Рисунке 4 [24,25,26], как технология бесконтактного, дистанционного обнаружения, сенсоры, загруженные на платформу дистанционного зондирования, могут обнаруживать и принимать электромагнитные волны, излучаемые и отражаемые различными объектами на поверхности земли, которые преобразуются в исходные изображения в соответствии с определенным законом, а затем передаются в наземный вычислительный processing центр для получения характеристической информации о целевых растениях, включая полог и болезни [26], для эффективного получения сельскохозяйственной информации о вредителях, болезнях и сорняках. В контроле возможных вредителей, болезней и сорняков спутниковое дистанционное зондирование имеет много преимуществ, таких как большая область мониторинга [26] и достаточная спектральная информация [27], что позволяет реализовать динамический мониторинг вредителей, болезней и сорняков в больших масштабах. Оно также может анализировать взаимосвязь между закономерностью развития вредителей, болезней и сорняков и окружающей средой, обеспечивая научную основу для инициатив по профилактике и контролю заранее [28,29,30].
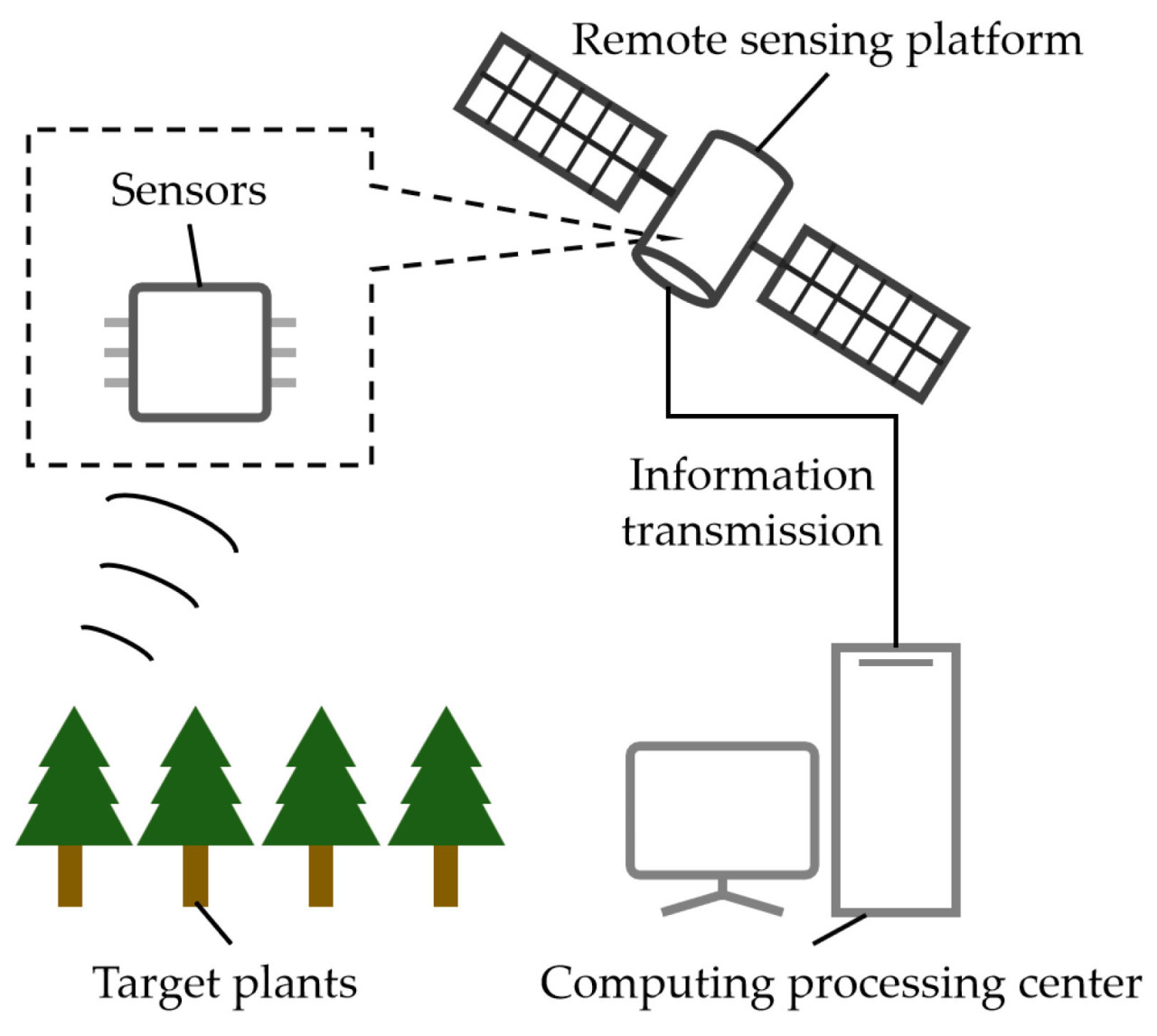
Рисунок 4. Схема дистанционного зондирования.
3.2.1. Мультиспектральное
Мультиспектральные методы дистанционного зондирования анализируют особенности поверхности, захватывая спектральную информацию на разных длинах волн. Разные состояния растений, такие как здоровые, зараженные вредителями и сорняками, недостаток воды и т.д., отражают и поглощают разные длины волн света, что приводит к изменениям в спектральных особенностях, которые отражают здоровье растительности [1]. Анализируя эти спектральные характеристические показатели, такие как Нормализованный Разностный Вегетационный Индекс (NDVI) [31], Вегетационный Индекс Соотношения (RVI) [32] и Нормализованный Разностный Водный Индекс (NDWI) [33], мы смогли определить состояние здоровья растительности и идентифицировать и классифицировать вредителей, болезни и сорняки. Мультиспектральное дистанционное зондирование обычно используется для мониторинга и оценки вредителей, болезней и сорняков и идентификации потенциальных проблем до того, как они вызовут значительные потери. На Рисунке 5 показана схематическая диаграмма мультиспектрального дистанционного зондирования, используемого для идентификации деревьев и сорняков. Примечание: t01 до t06 обозначают идентифицированные дерево 1 через дерево 6 соответственно.
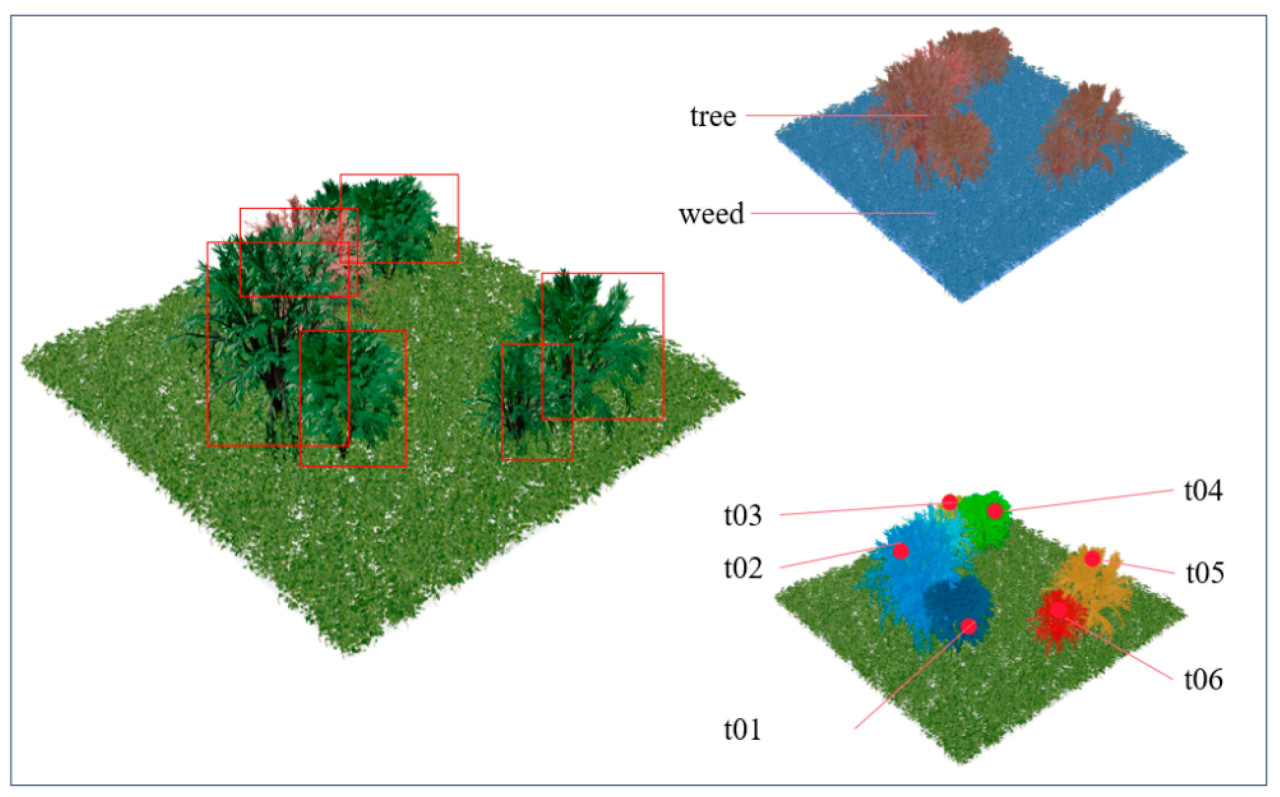
Рисунок 5. Мультиспектральные изображения дистанционного зондирования
3.2.2. Гиперспектральное
Гиперспектральная технология дистанционного зондирования может захватывать более детальную и широкую спектральную информацию по сравнению с мультиспектральным дистанционным зондированием, предоставляя больше спектральных деталей и особенностей. Гиперспектральная технология дистанционного зондирования повышает точность и надежность идентификации целей, захватывая спектры отражения или излучения поверхностных материалов в большом количестве последовательных узких полос, resulting in спектральный профиль от десятков до сотен полос для каждой точки пикселя [34]. Когда вредители заражают листья растений, их биохимические и структурные свойства меняются, что влияет на их спектральную отражательную способность. Эти изменения могут быть проанализированы для идентификации и мониторинга вредителей, болезней и сорняков [35]. Гиперспектральное дистанционное зондирование подходит для точной идентификации и мониторинга конкретных вредителей, сорняков и болезней. Однако гиперспектральное дистанционное зондирование связано с большим объемом данных, что делает затраты на обработку высокими.
3.2.3. Ближнее инфракрасное
Технология дистанционного зондирования в ближнем инфракрасном диапазоне (NIR) в основном использует отражательные свойства листьев растений к инфракрасному свету для мониторинга здоровья растений [14]. Здоровые листья растений поглощают большое количество видимого света и отражают большое количество ближнего инфракрасного света из-за своего богатого содержания хлорофилла [15]. Когда вредители, болезни и сорняки атакуют растения, содержание хлорофилла уменьшается, уменьшая отражательную способность ближнего инфракрасного света, и зараженные растения могут быть идентифицированы путем мониторинга этого изменения [16,34]. Технология дистанционного зондирования в ближнем инфракрасном диапазоне может охватывать широкую область и быстро получать информацию о состоянии здоровья культур на больших площадях. Однако, когда вредители распределены неравномерно или находятся на ранних стадиях заражения, инфракрасная технология дистанционного зондирования недостаточна для идентификации мелкомасштабных или ранних заражений вредителями и сорняками из-за ограничений пространственного разрешения.
3.2.4. Тепловое инфракрасное
Технология теплового инфракрасного дистанционного зондирования основана на изменениях температуры поверхности листьев растений [36,37] и может быть использована для мониторинга транспирации и состояния здоровья растений, захватывая изменения температуры поверхности [38]. Растения выделяют воду через транспирацию для регулирования температуры тела. Когда растения заражены и транспирация нарушена, изменения температуры поверхности листа могут быть ощущены для мониторинга вредителей, болезней и сорняков.
3.2.5. Радар с синтезированной апертурой
Технология Радара с Синтезированной Апертурой (SAR) использует способность радиоволн проникать через облака и части растительности, передавая электромагнитные волны на землю, а затем принимая отраженные сигналы. Анализ этих отраженных сигналов может получить информацию о наземных целях [39]. Различные наземные вещества и условия (например, влажность, структура, материал и т.д.) влияют на отражательные свойства радиоволн. Анализируя данные изображений SAR, можно идентифицировать тип заражения вредителями и сорняками [40]. Поскольку микроволны могут проникать через облака и определенную степень растительного покрова, SAR подходит для всепогодного, круглосуточного мониторинга. Однако SAR имеет проблемы, такие как сложность интерпретации.
3.2.6. Беспилотные летательные аппараты
Оборудование дистанционного зондирования, устанавливаемое на БПЛА, все чаще используется в точном земледелии и управлении вредителями и сорняками due to его низкой стоимости, высокой гибкости и высокому разрешению. БПЛА могут нести камеры [41,42] и сенсоры, такие как мультиспектральные, гиперспектральные [43] и тепловые инфракрасные сенсоры, для обнаружения, мониторинга и оценки вредителей, болезней и сорняков в локализованных областях. Дистанционное зондирование с БПЛА особенно подходит для тонкого управления и мелкомасштабного, высокоточного мониторинга вредителей, болезней и сорняков [44].
3.2.7. Лидар
Как технология 3D дистанционного зондирования, Лидар (Light Detection and Ranging) используется для получения точной 3D позиционной информации целей, включая высоту деревьев, плотность полога и покрытие полога, путем испускания лазерных импульсов и измерения времени, когда эти импульсы отражаются от цели [45,46]. Лидар имеет преимущество получения высокоточных моделей высот данных, цифровых моделей поверхности, ортофотопланов, цифровых линейных графиков, 3D сцен и построения 3D моделей. Он имеет преимущества малых environmental ограничений, низких эксплуатационных затрат, высокой скорости сбора данных и высокой точности данных [47]. Информация, полученная с помощью флуоресцентного лидара, помогает пользователям понять здоровье и среду роста растительности, thus идентифицируя неблагоприятные условия, которые могут привести к вредителям, болезням и сорнякам [17]. Однако обнаружение флуоресценции через насекомых, опыленных dye powder, было бы технологически сложным и дорогостоящим в полевых условиях. Современная технология лидара, которая может включать распределение спектра и использование multiple длин волн, имеет характеристики неограниченности условиями освещения и сильной проникающей способностью. Однако у этой технологии still есть недостатки, такие как сложная обработка данных, высокая стоимость оборудования и сложность интерпретации.
Лидар может быть классифицирован в соответствии с типом формы сигнала, режимом обнаружения, количеством лучей, функциональным использованием, режимом сканирования, источником лазерного света, платформой доставки и т.д. Классификация лидара показана на Рисунке 6.
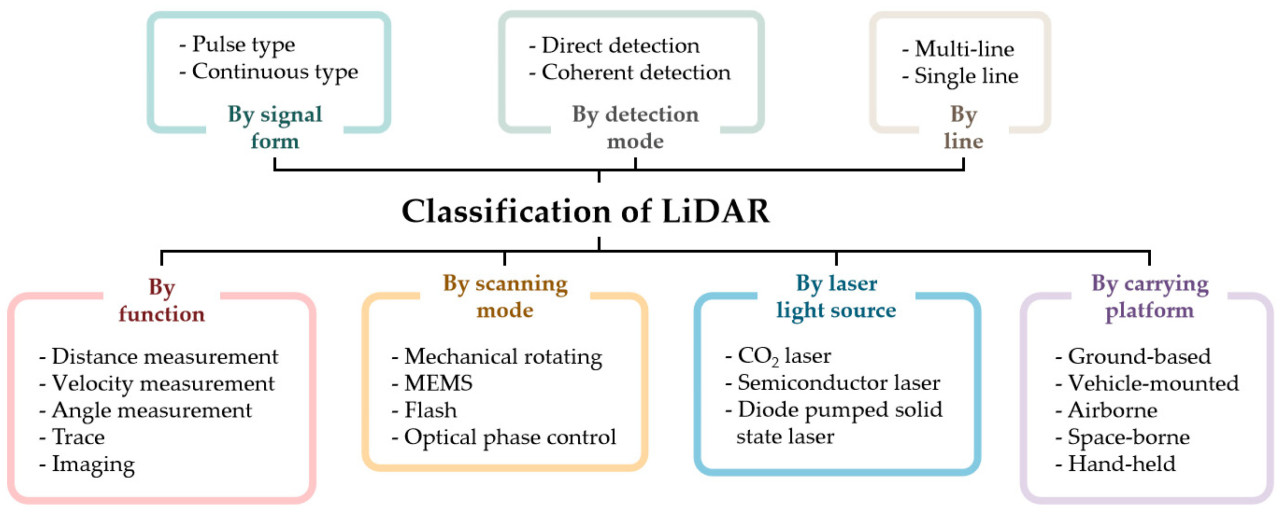
Рисунок 6. Классификация Лидара.
Установленный на транспортном средстве 2D лазерный сканер используется для получения односторонних данных облака точек деревьев, и после преобразования координат и дискретизации вычисляется масштабная информация, связанная с целевым растением, для достижения онлайн-измерения объема полога в непрерывных/прерывистых сценариях крон деревьев и обеспечения технической поддержки для точного применения пестицидов [48]. Сочетание воздушного лазера и аэромультиспектральных данных может автоматически идентифицировать области вспышек вредителей и сорняков и прогнозировать вероятность заражения.
3.3. Технология сбора целевой информации на основе акустических волн
Акустические волны — это механические волны, которые могут распространяться через воздух, жидкости и твердые тела. Разные вещества и структуры имеют разные свойства отражения, поглощения и передачи акустических волн, что обеспечивает основу для идентификации и обнаружения. Технология сбора целевой информации на основе акустических волн обнаруживает и идентифицирует вредителей, болезни и сорняков сельскохозяйственных культур, используя свойства акустических волн.
Распространенные методы акустического обнаружения включают следующие:
1. Акселерометры обнаруживают вибрации, измеряя ускорение поверхности. Вибрации или удары могут быть ощущены в одной или нескольких осях. Они обычно закреплены на поверхности растения и обнаруживают малые вибрации, генерируемые активностью внутренних насекомых [49]. Однако применение для массового выращивания ограничено из-за непрактичности развертывания сенсоров на миллионах отдельных растений в крупномасштабных сельскохозяйственных условиях;
2. Пьезоэлектрические кристаллы используются для прямого преобразования механического напряжения в электрический сигнал. Когда на них оказывается давление, кристалл генерирует измеримый электрический заряд, способный захватывать и преобразовывать акустические волны или вибрации в электрические сигналы для обнаружения активности насекомых [50,51];
3. Акустические зонды с интегрированными пьезоэлектрическими сенсорами или акселерометрами могут быть вставлены в почву, культуры или деревья для записи и анализа акустических сигналов, генерируемых активностью насекомых. Различные насекомые-вредители автоматически идентифицируются алгоритмами обработки сигналов [52];
4. Принцип идентификации вредителей с помощью микрофона в основном основан на измерениях ударной акустики (IA). Он собирает и анализирует акустические сигналы, генерируемые при воздействии на образцы культур specific материалами (например, стальными пластинами), и захватывает их с помощью высокочувствительного микрофона. Впоследствии частотные и амплитудные характеристики сигналов вводятся в нейронную сеть для анализа, чтобы определить, заражена ли культура и ее серьезность [53];
5. Ультразвуковые волны, генерируемые ультразвуковым преобразователем, могут обнаруживать насекомых-вредителей в деревьях. Время пролета (TOF) — это параметр, который измеряет время, необходимое акустической волне для распространения на определенное расстояние в среде. TOF чрезмерно чувствителен к дефектам в деревьях. Измеряя TOF акустических волн, ультразвуковые преобразователи могут эффективно обнаруживать насекомых-вредителей в дереве и оценивать общее здоровье деревьев [54].
Эти методы акустического обнаружения хорошо работают в лабораторных условиях, но сталкиваются с проблемами в практических применениях, таких как фоновый шум и помехи от ветра. Кроме того, установка сенсоров может повредить образцы, и интерпретация сигналов может быть сложной.
3.4. Технология сбора целевой информации на основе электронного носа
Технология сбора целевой информации на основе электронного носа (e-nose) — это диагностический метод обнаружения и идентификации различных растительных вредителей, болезней и сорняков с помощью устройств электронного носа. Электронный нос имитирует биологическую обонятельную систему и состоит из массива сенсоров, схемы conditioning сигналов и алгоритма распознавания образов. Растения выделяют specific летучие органические соединения (VOCs), когда заражены вредителями и болезнями или сталкиваются с сорняками [55,56]. Когда VOCs проходят через массив сенсоров, они вызывают обратимые физико-химические изменения в чувствительных материалах, которые изменяют электрические свойства, такие как сопротивление и потенциал.
При диагностике раннего заражения тлей у тепличных растений томата, VOCs, выделяемые из здоровых и зараженных тлей растений томата, могут быть проанализированы с помощью электронных носов, оснащенных multiple газовыми сенсорами и системами сбора данных, чтобы идентифицировать заражение тлей до того, как растения проявят видимые симптомы [57]. Однако диагностический метод в контролируемых тепличных условиях может не применяться и требует модификации для открытых пространств.
Был разработан портативный электронный нос для оценки ущерба, причиненного хлопковыми вредителями, включая клопов-щитников, путем извлечения VOCs из headspace хлопковой коробочки с использованием композитных сенсоров углеродной сажи-полимера. Устройство может классифицировать хлопок как поврежденный или неповрежденный, дифференцируя VOCs, выделяемые из неповрежденных или поврежденных коробочек. Однако environmental факторы могут влиять на отклик сенсора, поэтому было бы полезно обучать устройство в тех же environmental условиях, чтобы минимизировать эффекты этих факторов [58].
Индуцированные системной резистентностью защитные ассоциированные VOCs значительно влияют на VOC-сигнатуру больных растений. Летучие растительные защитные и защитные соединения включают терпеноиды, эфирные масла, растительные гормоны, вторичные метаболиты, другие метаболические побочные продукты и соединения, связанные с повреждением клеток. Изменения в выбросах растительных VOCs, связанные с болезнями растений, в конечном итоге привели к коллективному анализу VOCs с использованием массивов сенсоров в электронных носах [59]. Электронный нос имеет низкий порог для обнаружения VOCs и не требует физического контакта или повреждения растения. Кроме того, системы электронного носа имеют преимущества низкой стоимости и простоты использования, без необходимости обширного обучения, быстрых результатов, удобной портативности и высокой точности [60]. Однако другие environmental запахи могут мешать результатам обнаружения и требуют сложных алгоритмов для анализа данных.
3.5. Технология сбора целевой информации на основе IoT
Технология IoT в сельском хозяйстве относится к применению сенсоров IoT [61,62] и систем, изначально разработанных для различных сенсоров, технологий беспроводной связи (например, LoRa, NB-IoT, 4G/5G и т.д.) и платформ обработки данных. Эти технологии применяются для достижения мониторинга в реальном времени, интеллектуального анализа и точного управления environmental условиями сельскохозяйственного производства и условиями роста культур [63,64]. Это позволяет осуществлять точное управление и интеллектуальный контроль сельскохозяйственного производства [65], повышая эффективность и качество продукции, уменьшая загрязнение окружающей среды, экономя ресурсы и снижая затраты [66]. Сельскохозяйственная технология IoT включает сбор, хранение, обработку и анализ данных сельскохозяйственной информации, полагаясь на технологию облачных вычислений, технологию больших данных, технологию граничных вычислений [67,68] и т.д. С непрерывным развитием технологий и снижением затрат сельскохозяйственная технология IoT будет более широко использоваться в технологиях ИПРП в будущем.
ИПРП было бы невозможно без сенсоров IoT. Сенсоры используются для сбора и измерения различных факторов и переменных окружающей среды, которые могут повлиять на урожайность культур [69], и мониторинга аномалий, сорняков, болезней, вредителей и картирования культур с помощью пространственного, спектрального и временного разрешения [70,71,72].
Сельскохозяйственная технология IoT глубоко интегрирована с вышеупомянутыми технологиями. Сильные и слабые стороны различных технологий сбора целей были проанализированы, как показано в Таблице 1.
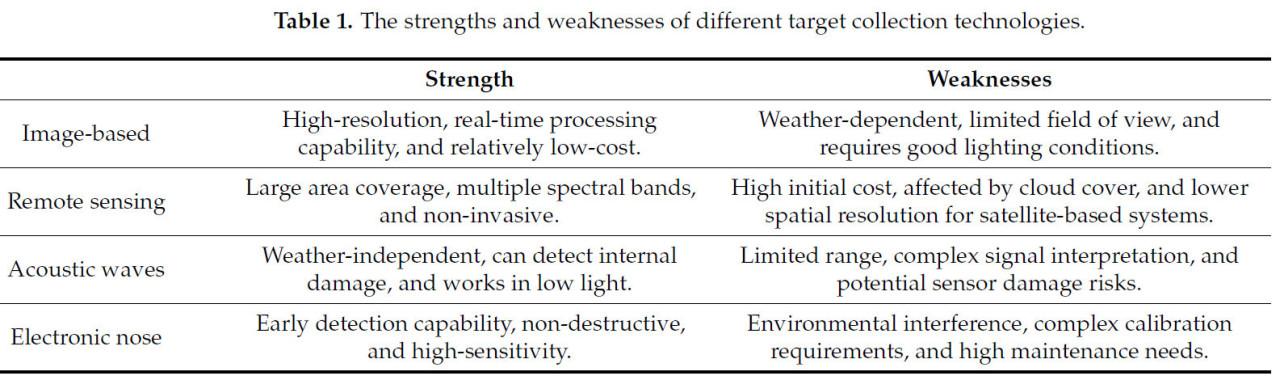
Таблица 1. Сильные и слабые стороны различных технологий сбора целей.
4. Уровень обработки информации
Уровень обработки информации включает техники предварительной обработки для улучшения качества набора данных и увеличения количества образцов в наборе данных; техники анализа информации для анализа взаимосвязи между различными показателями и особенностями и вредителями, болезнями и сорняками; и техники улучшения модели для повышения способности к обобщению и точности модели. Кроме того, широко используются различные методы, такие как глубокое обучение, распознавание изображений, географические информационные системы (ГИС), анализ временных рядов, интеллектуальный анализ данных, а также молекулярная биология и обнаружение химических индукторов, которые не только повышают точность и оперативность идентификации вредителей, болезней и сорняков, но и обеспечивают научную основу для разработки стратегий контроля, внося важный вклад в устойчивое развитие современного сельского хозяйства.
4.1. Техники предварительной обработки информации
Техники предварительной обработки информации в процессах идентификации вредителей, болезней и сорняков приобретают целевые изображения или данные для повышения точности и эффективности идентификации. Эти техники включают, но не ограничиваются, предварительной обработкой изображений, очисткой данных, увеличением данных и преобразованием данных.
1. Предварительная обработка изображений является критическим шагом в идентификации вредителей, болезней и сорняков, и ее основная цель — улучшить качество изображения и сделать его более подходящим для последующих шагов обработки [73,74], чтобы увеличить правильность идентификации. Распространенные техники предварительной обработки изображений включают улучшение изображения [75], шумоподавление изображения [76,77] и сегментацию изображения [78,79];
2. Очистка данных является ключевым шагом в предварительной обработке данных, и очищенные данные более подходят для анализа и моделирования, повышая точность и надежность идентификации и классификации вредителей, болезней и сорняков. Она включает использование статистических методов для идентификации выбросов, удаления дублирующихся данных и удаления или заполнения пропущенных значений;
3. Увеличение данных — это распространенная техника, используемая в процессе обучения моделей глубокого обучения для генерации новых обучающих выборок путем вращения [80], отражения, обрезки и т.д. изображений растений, содержащих вредителей или пятна болезней, thus увеличивая разнообразие данных и улучшая способность модели к обобщению [81,82];
4. Преобразование данных является важным шагом в предварительной обработке данных, который преобразует данные в формат, подходящий для анализа и моделирования. Например, нормализация данных важна при работе с не-изображенческими данными (например, температура, влажность, pH почвы и т.д.), связанными с вредителями, болезнями и сорняками. Она направлена на преобразование данных из разных источников к одному масштабу, чтобы устранить эффект величины данных [83,84], и commonly используемые методы включают нормализацию минимум-максимум и z-оценку нормализации. При работе с данными с экспоненциальным ростом часто используется логарифмическое преобразование для уменьшения асимметрии данных. При выполнении задач классификации часто используются one-hot кодирование и label кодирование для обработки, и они могут преобразовывать категориальные переменные в бинарные векторы или целые числа.
В заключение, техники предварительной обработки информации для идентификации вредителей, болезней и сорняков являются сложными процессами, которые включают несколько шагов, таких как предварительная обработка изображений, нормализация данных, извлечение и выбор признаков и увеличение данных. Эти техники могут эффективно повысить точность и эффективность распознавания вредителей.
4.2. Извлечение целевых признаков и идентификация вредителей, болезней и сорняков
Извлечение целевых признаков involves идентификация и использование ключевых признаков для классификации и идентификации информации о целях распыления пестицидов. Извлечение признаков — это процесс преобразования сырых данных в форму, более подходящую для обработки моделью. Он использует интеллектуальный анализ данных, глубокое обучение и распознавание изображений. Кроме того, выбор признаков выбирает наиболее полезные части из этих признаков, чтобы уменьшить сложность модели и повысить эффективность распознавания [85]. Распространенные признаки включают цветовые признаки [86], признаки формы [87,88] и признаки текстуры [89].
4.2.1. Интеллектуальный анализ данных
Техники интеллектуального анализа данных играют жизненно важную роль в идентификации и прогнозировании целей. Интеллектуальный анализ данных — это процесс извлечения полезной информации и знаний из большого количества данных, включая различные техники, такие как статистика, машинное обучение и распознавание образов. Использование техник интеллектуального анализа данных может помочь лучше выяснить и предсказать возникновение вредителей, болезней и сорняков, чтобы можно было принять более эффективные профилактические и контрольные меры [90,91].
Сценарии применения технологии интеллектуального анализа данных включают автоматическую идентификацию вредителей, болезней и сорняков путем анализа изображений растений или других сенсорных данных с использованием техник обработки изображений и распознавания образов [92]. Анализируя исторические данные о вредителях, болезнях, сорняках и связанных environmental факторах (например, температура, влажность, осадки и т.д.), используются модели машинного обучения для прогнозирования вероятности и серьезности будущего заражения [93,94]. В сочетании с ГИС и техниками дистанционного зондирования можно анализировать риск вредителей, болезней и сорняков в specific области, чтобы предоставить ссылку для сельскохозяйственного производства [95,96].
Ключевые техники интеллектуального анализа данных включают классификацию, регрессию, кластерный анализ и mining ассоциативных правил.
Алгоритмы классификации, такие как деревья решений [97], случайный лес (RF) [98] и машина опорных векторов (SVM) [99], используются для идентификации типов вредителей, болезней и сорняков. Алгоритмы регрессии, такие как линейная регрессия [100] и гребневая регрессия [101], используются для прогнозирования серьезности вредителей, болезней и сорняков.
Закономерность распределения вредителей, сорняков и болезней анализируется с помощью алгоритмов кластеризации (например, K-средних, иерархическая кластеризация и т.д.), чтобы помочь лицам, принимающим решения, formulate региональные стратегии профилактики и контроля [102,103,104].
Mining ассоциативных правил важно для выяснения корреляции между возникновением вредителей, болезней и сорняков и лежащими в основе environmental факторами. Эти знания являются фундаментальными для разработки и реализации эффективных стратегий контроля за вредителями, болезнями и сорняками [105].
4.2.2. Глубокое обучение и распознавание изображений
Используя модели глубокого обучения (DL), такие как сверточные нейронные сети (CNN), признаки могут быть автоматически извлечены из изображений растений для достижения быстрой и точной идентификации различных вредителей, болезней и сорняков [106,107]. Эта технология повышает эффективность и точность распознавания, а также позволяет осуществлять мониторинг больших площадей сельскохозяйственных угодий в реальном времени, помогая фермерам своевременно выявлять и решать проблемы, тем самым повышая урожайность и качество культур.
В системах идентификации и раннего предупреждения о вредителях, болезнях и сорняках технология распознавания изображений может автоматически идентифицировать и классифицировать целевые признаки с помощью технологии компьютерного зрения для интерпретации и понимания содержания изображений [87,108]. Динамический сбор морфологии культур более благоприятен для принятия решений в реальном времени для точных операций распыления в полях [109].
Как алгоритм обнаружения целей на основе глубокого обучения, You Only Look Once (YOLO) использует глубокую сверточную нейронную сеть (CNN) для обнаружения целей. Сетевая архитектура YOLO обычно включает multiple сверточные, пулинговые и fully connected слои для извлечения признаков и обнаружения целей. YOLO обучается сквозным подходом, который может упростить проектирование и реализацию модели, позволяя ей эффективно выполнять обнаружение вредителей-целей [110]. YOLO рассматривает обнаружение целей как проблему регрессии, а не как проблему классификации. Он предсказывает ограничивающую рамку и вероятности категорий непосредственно из изображения. В отличие от двухэтапного обнаружения (например, семейство R-CNN), YOLO требует только одного прямого распространения для завершения обнаружения сельскохозяйственных болезней [111].
Возможность обнаружения в реальном времени YOLO делает его хорошо подходящим для обеспечения быстрой идентификации и локализации вредителей, болезней и сорняков на культурах [112,113] и раннего прогнозирования вредителей, болезней и сорняков [114]. Due to его одноэтапной природе обнаружения, YOLO может эффективно работать в средах с ограниченными вычислительными ресурсами, что важно для полевого обнаружения в сельском хозяйстве [115]. YOLO может обнаруживать multiple вредителей, болезней и сорняков одновременно [116,117], что полезно для сложных сельскохозяйственных сред.
По сравнению с CNN, некоторые новые улучшенные нейронные сети, такие как каскадная сеть трансформеров с вниманием (CATNet) [118,119], генеративно-состязательная управляемая кросс-осведомленная сеть (GACNet) [120] и пространственная, спектральная и текстурно-осведомленная сеть внимания (SSTNet) с использованием гиперспектральных изображений [121], ввели механизмы внимания, улучшили эффективность извлечения целевых признаков и достигли более высокой точности распознавания.
После предварительной обработки данных и извлечения признаков выбирается подходящая модель для обучения, чтобы модель могла точно идентифицировать типы вредителей, болезней и сорняков. Однако, ограниченные объемом обучающих выборок и временными затратами, эффективность обучения может быть повышена за счет использования transfer и incremental обучения. Transfer обучение использует модели, предварительно обученные на других больших наборах данных, в качестве отправной точки, и они дорабатываются для specific задач идентификации вредителей [111,122]. Со временем, incremental обучение continuously включает вновь собранные данные в обучающий набор и продолжает обучать модель, чтобы улучшить ее точность и адаптивность [123,124].
4.3. Анализ биологических характеристик целей
В дополнение к традиционным методам идентификации целей, молекулярная биология и технологии обнаружения химических индукторов все чаще предоставляют новые, углубленные способы понимания вредителей, болезней и сорняков на микроскопическом генетическом и метаболическом уровнях с быстрым развитием биотехнологии. Эти методы позволяют проводить более раннюю и точную идентификацию целей и предоставляют информацию о физиологических механизмах вредителей, болезней и сорняков, а также о защитных реакциях растений, thus предоставляя новые перспективы и основы для точного распыления пестицидов.
4.3.1. Технология идентификации целей на основе молекулярной биологии
Техники идентификации целей на основе методов молекулярной биологии в основном направлены на идентификацию и изучение ключевых биологических характеристик патогенов, вредителей и сорняков, которые вызывают повреждение культур, для разработки более эффективных стратегий контроля. Распространенные методы молекулярной биологии для идентификации целей включают анализ геномики и транскриптомики, протеомику и метаболомику, технологию молекулярных маркеров и техники редактирования генов.
1. Обнаружение генома [125] и транскриптома [126] патогенов, вредителей или сорняков может идентифицировать ключевые гены или паттерны экспрессии генов, связанные с развитием болезней, вредителей или сорняков. Эта информация необходима для понимания биологии вредителей, процесса заражения и механизма взаимодействия с растением-хозяином;
2. Техники протеомики и метаболомики involve изучение белков [125] и метаболитов [126,127,128] патогенов, вредителей или сорняков. Новые точки вмешательства могут быть обнаружены путем идентификации ключевых белков и метаболических путей;
3. Специфические гены или области генома, связанные с болезнями, вредителями или сорняками, могут быть отслежены и идентифицированы с помощью технологии молекулярных маркеров. Это помогает понять генетическое разнообразие вредителей и патогенов и их механизмы устойчивости к пестицидам [129,130];
4. Техники редактирования генов, такие как CRISPR-Cas9, могут быть использованы для нокаута или модификации specific генов патогенов, вредителей или сорняков для изучения функции этих генов и их роли в физиологической активности организма. Это помогает проверить потенциальные цели контроля [131,132,133].
4.3.2. Обнаружение химических индукторов
Обнаружение и идентификация specific молекул или биологических процессов, которые могут быть использованы для контроля патогенов, вредителей или сорняков, также является ключевой стратегией в технологии идентификации целей. Технология обнаружения химических индукторов involves идентификация и анализ specific химических веществ, производимых растениями, когда они заражены патогенами или вредителями или подвергаются другим стрессовым условиям. Эти химические вещества, часто называемые фитогормонами или сигнальными молекулами, такими как жасмоновая кислота, салициловая кислота и этилен, играют ключевую роль в защитной реакции растения. Основные методы техник обнаружения химических индукторов включают высокоэффективную жидкостную хроматографию (HPLC)–сверхвысокоэффективную жидкостную хроматографию (UPLC), газовую хроматографию–масс-спектрометрию (GC-MS), жидкостную хроматографию–масс-спектрометрию (LC-MS) и иммуноферментный анализ (ELISA).
1. HPLC [134]-UPLC [135] является наиболее commonly используемой техникой химического анализа. Она может точно разделять, идентифицировать и количественно анализировать химические индукторы растений. С помощью HPLC-UPLC можно идентифицировать specific соединения, выделяемые растениями, когда они заражены, и thus понять роль этих соединений в защите растений;
2. GC-MS — это another мощная аналитическая техника, которая особенно подходит для анализа летучих органических соединений (VOCs), выделяемых растениями при атаке вредителями, болезнями и сорняками, которые могут служить для привлечения естественных врагов или подавления вредителей [136,137];
3. LC-MS сочетает возможность разделения жидкостной хроматографии с возможностью идентификации масс-спектрометрии и подходит для анализа нелетучих и полярных соединений. LC-MS может обнаруживать и идентифицировать вторичные метаболиты и сигнальные молекулы в теле растения, которые играют ключевую роль в защитных реакциях растений [138];
4. ELISA — это биохимическая техника на основе антител, которая может быть использована для specific обнаружения и количественного анализа растительных гормонов и других белковых маркеров. Чувствительность и специфичность ELISA делают ее идеальной для обнаружения сигнальных молекул растений при низких концентрациях [139].
Эти техники обнаружения химических индукторов позволяют глубже понять механизмы защиты растений, что может привести к открытию и разработке новых и более эффективных стратегий контроля за вредителями, болезнями и сорняками. Эти стратегии могут включать разработку химического индуктора, который стимулирует или усиливает защитную реакцию растения, или проектирование синтетических соединений, которые нацелены на specific химические индукторы, чтобы вмешиваться в физиологические процессы вредителей или патогенов.
Сильные и слабые стороны анализа биологических характеристик целей по сравнению с традиционными и DL методами показаны в Таблице 2.
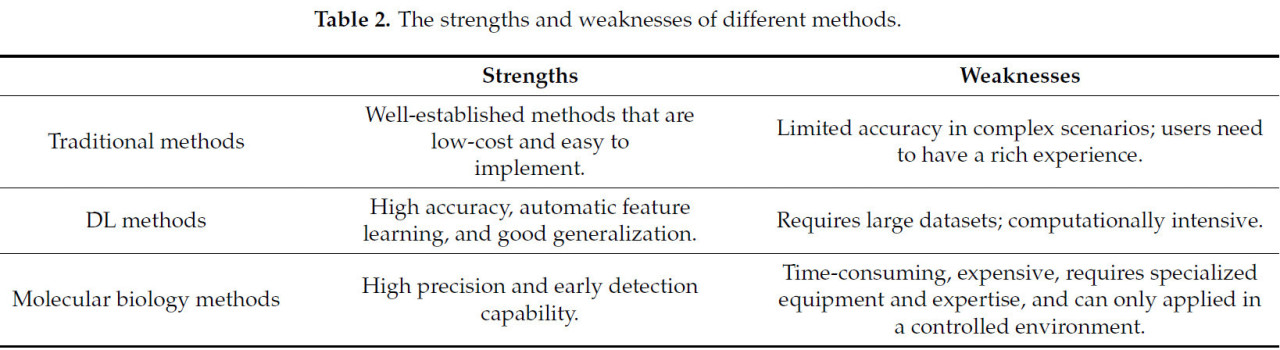
Таблица 2. Сильные и слабые стороны различных методов
4.4. Анализ временных рядов для прогнозирования вредителей и болезней
ГИС может собирать, управлять и анализировать геопространственные данные [140]. ГИС использует спутники, БПЛА и наземные носители для сбора информации о сельскохозяйственных условиях и анализирует и обрабатывает их с помощью обработки изображений, слияния данных, анализа временных рядов и пространственного анализа. Затем, объединяя прошлые данные и текущую информацию, ГИС используется для построения модели прогнозирования вредителей, болезней и сорняков и оценки будущих рисков. Анализируя потенциальные воздействия вредителей, болезней и сорняков на урожайность и качество культур [141], разрабатываются целенаправленные меры контроля за вредителями, болезнями и сорняками на основе результатов анализа ГИС [142].
Анализ временных рядов — это статистический метод для анализа хронологических точек данных, чтобы понять прошлое поведение, предсказать будущие тенденции или идентифицировать значимые закономерности из данных.
Применение техник анализа временных рядов в идентификации целей involves использование данных временных рядов для мониторинга и идентификации вредителей, болезней и сорняков. Данные временных рядов могут быть температурой, влажностью, светом, показателями роста растений и т.д., обычно собираемыми с помощью сенсоров с течением времени. Анализ временных рядов может помочь предсказать вероятность и серьезность вредителей, болезней и сорняков с течением времени, анализируя целевые данные. Это чрезвычайно полезно для разработки профилактических и контрольных мер заранее. Кроме того, environmental факторы, такие как температура, влажность и осадки, напрямую влияют на возникновение вредителей, болезней и сорняков. Анализ временных рядов может быть использован для анализа взаимосвязи между этими environmental факторами и возникновением вредителей, сорняков и болезней, thus прогнозируя риск заражения при specific environmental условиях.
Распространенные технические подходы к анализу временных рядов включают авторегрессионные (AR) и скользящие средние (MA) модели [143]. Некоторые модели являются расширениями этих двух моделей, включая следующие:
1. Модель авторегрессионного скользящего среднего (ARMA) сочетает особенности моделей AR и MA, которая используется как статистическая модель для анализа и прогнозирования данных временных рядов и подходит для анализа smooth данных временных рядов. Модель ARMA позволяет моделировать количественные изменения популяций насекомых и анализировать рост, спад и циклические колебания популяции. В то время как традиционные модели динамики популяции обычно детерминированы, модели ARMA могут вводить случайные факторы, чтобы лучше моделировать эффекты непредсказуемых факторов в реальной среде на популяцию. Модели ARMA могут помочь количественно оценить силу и стабильность регуляции популяции, particularly плотностной зависимости и механизмов обратной связи. Модели ARMA могут идентифицировать и интегрировать временные лаги и сезонные паттерны, которые essential для точного прогнозирования возникновения и развития вредителей, болезней и сорняков. Через эти особенности модели ARMA играют важную роль в идентификации вредителей, болезней и сорняков, помогая исследователям и фермерам лучше понимать и управлять динамикой популяций насекомых [144];
2. Модель авторегрессионного проинтегрированного скользящего среднего (ARIMA) является расширением модели ARMA, которая обрабатывает нестационарные данные временных рядов. Например, *Trialeurodes vaporariorum* является основным вредителем тепличных культур и может передавать различные растительные вирусы, и традиционные методы распыления пестицидов являются дорогостоящими и могут негативно влиять на окружающую среду и здоровье фермеров. Модели на основе анализа временных рядов (ARIMA и ARIMAX; X — внешняя переменная) были разработаны для прогнозирования роста популяции *Trialeurodes vaporariorum* в теплицах. Прогнозирование изменений в популяциях *Trialeurodes vaporariorum* помогает фермерам более эффективно планировать распыление пестицидов. В отличие от модели ARIMA, которая использует только данные о популяции *Trialeurodes vaporariorum*, модель ARIMAX объединяет данные о популяции *Trialeurodes vaporariorum* и environmental данные (например, температура и влажность), что может более эффективно прогнозировать рост популяции *Trialeurodes vaporariorum*. Автоматизация сбора данных и анализа позволяет фермерам управлять вредителями более своевременно и точно, сокращать использование пестицидов и повышать устойчивость сельскохозяйственного производства [145];
3. Сезонная модель авторегрессионного проинтегрированного скользящего среднего (SARIMA) является расширением модели ARIMA и специально разработана для работы с данными с distinct сезонными закономерностями. Например, манговый блошиный жук является основным вредителем манго в тропических и субтропических регионах Индии и может вызывать до 100% потери урожая. Использование SARIMA для прогнозирования популяций мангового блошиного жука может обеспечить своевременный и точный заблаговременный прогноз возникновения мангового блошиного жука и предоставить научную основу для разработки региональных стратегий интегрированной борьбы с вредителями. Применение модели SARIMA для идентификации вредителей, болезней и сорняков не только повышает точность прогнозирования, но и предоставляет фермерам научный инструмент поддержки принятия решений, который может помочь лучше справляться с проблемами, вызванными изменением климата [146].
Эффективное прогнозирование сроков и возможные эпидемиологические тенденции вредителей, болезней и сорняков являются ключом к контролю и управлению. Исследование привычек роста и размножения вредителей, болезней и сорняков provides основу для разработки appropriate сроков контроля и профилактики и анализа влияния различных environmental условий на вредителей, болезни и сорняки для определения их оптимальных сред обитания. В сочетании с технологиями IoT и анализа больших данных, системы мониторинга и предупреждения в реальном времени могут быстро реагировать, как только обнаруживаются аномалии. Вместе эти части образуют комплексную основу для управления вредителями, болезнями и сорняками, которая помогает увеличить урожайность культур и защитить экологическую среду.
5. Уровень предписывающего распыления пестицидов
Выбор пестицидов, расчет дозы, время распыления и метод являются ключевыми факторами в формулировании предписаний для распыления пестицидов. Эти факторы влияют на экономическую эффективность использования пестицидов и относятся к устойчивому управлению окружающей средой. Комбинируя современные технологии, такие как географическая информация, сенсорные технологии и компьютерное зрение, точное распыление пестицидов может точно управлять различными культурами, вредителями, болезнями и сорняками и их циклами возникновения, thus достигая более высокой эффективности применения и лучших экологических benefits.
5.1. Взаимосвязь между механизмами защиты растений и ИПРП
Растения developed сложные системы защиты, чтобы противостоять патогенам, вредителям и сорнякам в течение длительных периодов эволюции. Эти механизмы включают физическую, химическую и индуцированную защиту.
1. Физическая защита означает, что восковой слой эпидермиса [147,148], кутикула [149] и кора растений могут блокировать заражение патогенами и насекомыми. Некоторые растения имеют шипы, колючки и иголки [150], которые могут физически останавливать травоядных от поедания;
2. Химическая защита означает, что некоторые растения производят химические вещества, такие как алкалоиды, терпены и фенолы [151,152], которые могут отравлять или отпугивать травоядных насекомых. Некоторые растения выделяют VOCs при заражении, привлекая хищников против травоядных [153];
3. Индуцированная защита означает, что все растение активирует механизмы защиты, чтобы увеличить устойчивость к патогену, когда часть растения заражена [154,155,156], известную как системная приобретенная резистентность. Кроме того, растения передают информацию через сигнальные молекулы (например, жасмоновую кислоту и салициловую кислоту) в теле, чтобы активировать защитные гены [157,158].
На основе роста культуры и заражения вредителями и сорняками и т.д., разрабатываются персонализированные предписания. Основные особенности включают выбор пестицидов в соответствии с specific проблемами цели, точный контроль дозы и времени распыления, сокращение ненужного использования и затрат и уменьшение воздействия на окружающую среду.
Взаимосвязь между механизмами защиты растений и ИПРП показана на Рисунке 7.
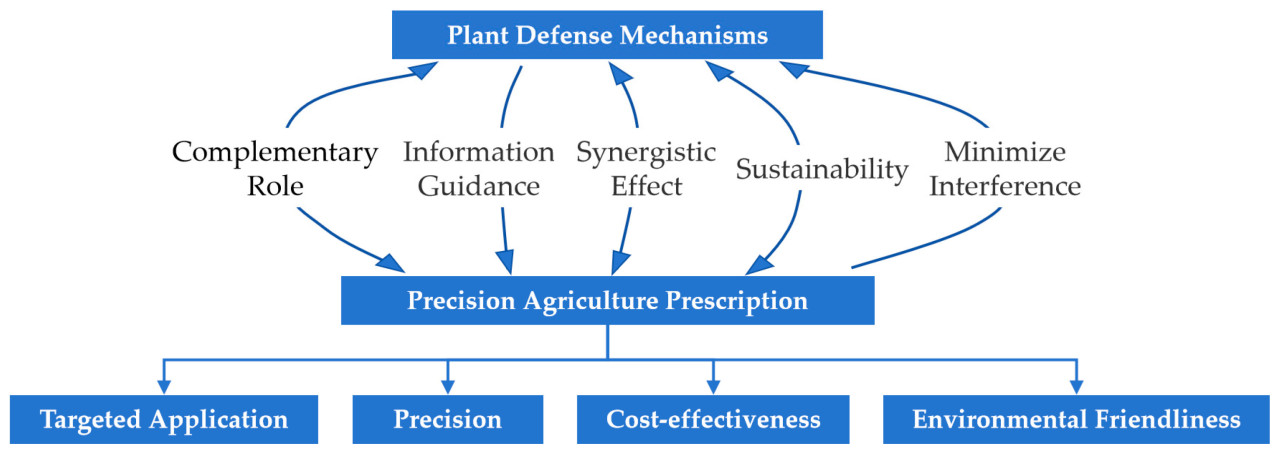
Рисунок 7. Взаимосвязь между механизмами защиты растений и ИПРП
1. Механизмы защиты растений являются первой линией обороны, и изучение этих механизмов может помочь в разработке устойчивых сортов и сокращении зависимости от пестицидов [159,160]. ИПРП является complementary инструментом для вмешательства, когда защиты растений недостаточно;
2. Понимание механизмов защиты растений может направлять больше информации для решений ИПРП. Например, своевременное профилактическое применение может быть проведено путем идентификации ранних сигналов защитной реакции растения;
3. Некоторые пестициды могут активировать механизм защиты растения, и разумное ИПРП может усилить защитную способность растения с некоторым синергетическим эффектом. Выбор правильного времени распыления и дозировки может быть combined с естественной защитной реакцией растения для повышения эффективности профилактики и контроля;
4. Использование механизмов защиты растений может сократить использование пестицидов в долгосрочной перспективе, что способствует устойчивому развитию агроэкосистемы. Сочетание ИПРП и механизмов защиты может привести к интегрированной борьбе с вредителями (IPM), которая эффективно контролирует вредителей, болезни и сорняки, одновременно уменьшая зависимость от химических пестицидов и усиливая естественные защитные способности растений;
5. Чрезмерное использование пестицидов может interfere с нормальными механизмами защиты растений, и ИПРП может минимизировать такое вмешательство.
Взаимосвязь между методами ИПРП и механизмами защиты растений является динамичной и сложной. Более глубокое понимание точного сельскохозяйственного предписания может помочь сельскохозяйственным производителям и исследователям разработать более эффективные и устойчивые стратегии управления вредителями, болезнями и сорняками. Сочетание естественных защитных механизмов целевых растений с оптимизированным применением пестицидов может обеспечить более точное, рентабельное и экологически чистое сельскохозяйственное производство.
5.2. Выбор препаративных форм пестицидов, расчет дозы и время использования
Разные механизмы защиты растений могут по-разному реагировать на разные типы пестицидов. Выбор appropriate типа пестицида основан на specific механизмах защиты растения и типах вредителей, болезней и сорняков [161]. Если растение relies в основном на индуцированную защиту, может потребоваться выбор пестицидов, которые активируют эти механизмы защиты.
Для достижения различной эффективности необходимо выбирать разные пестициды. Химические инсектициды доказали свою значительно более высокую эффективность по сравнению с биопестицидами в короткие сроки. Период эффективности биопестицидов значительно longer, чем у химических инсектицидов [162]. Кроме того, следует учитывать воздействие пестицидов на окружающую среду, и следует выбирать как можно более экологически чистые и легко разлагаемые пестициды [38]. Также следует избегать длительного использования одного и того же пестицида, leading к устойчивости у вредителей, болезней и сорняков, и следует чередовать пестициды с разными механизмами действия [163,164,165].
Точное распыление пестицидов в сельском хозяйстве involves точный контроль времени, метода, дозировки и типа распыления пестицидов. Рекомендуемая дозировка в инструкции по применению пестицида должна быть referred to первой при назначении дозы пестицида. Дозу можно корректировать в соответствии со стадией роста растения. Вообще говоря, более низкая доза используется на ранней стадии роста растения и может быть appropriately увеличена в период vigorous роста [38]. Дозу можно уменьшить, когда заражение вредителями, болезнями и сорняками mild. Когда serious, дозу необходимо увеличить, но она не должна превышать самую высокую дозу, рекомендованную в инструкции по применению пестицида. Возможно сокращение количества используемого пестицида для сортов с большей устойчивостью, thereby уменьшая воздействие на окружающую среду и затраты. Кроме того, при неблагоприятных условиях, таких как высокие температуры и засуха, количество используемых пестицидов должно быть appropriately уменьшено, чтобы минимизировать потенциальный ущерб растениям. In a word, цель состоит в том, чтобы контролировать вредителей, болезни и сорняки, одновременно минимизируя ущерб окружающей среде [166].
Правильное время и методы использования пестицидов essential для обеспечения эффективности пестицида и минимизации его воздействия на окружающую среду [167].
Разное время распыления пестицидов влияет на то, куда попадает пестицид, и количество пестицида, которое выщелачивается в дренажи [168]. Разные регионы имеют разные климатические градиенты и полевые характеристики, поэтому необходимо выбирать appropriate время применения на основе полевой среды и местных условий [169,170]. Кроме того, распыление пестицидов следует избегать в дождливую или сильную ветреную погоду, чтобы уменьшить потери и снос пестицида. Кроме того, высокие температуры и сильный солнечный свет также могут влиять на эффективность certain пестицидов, поэтому более appropriate выбирать более прохладное время утром или вечером для распыления пестицидов [170,171,172,173].
Понимание жизненного цикла specific вредителей, болезней и сорняков имеет critical значение для определения лучшего времени применения. Например, при работе с некоторыми вредителями лучшее время для применения может быть, когда они наиболее активны, поэтому определение лучшего времени для распыления инсектицидов может гарантировать, что популяции вредителей сохраняются ниже уровней экономических потерь [174]. С другой стороны, для некоторых болезней оптимальное время для распыления пестицидов может быть до начала болезни. Для других распыление пестицидов может потребоваться, как только обнаружены признаки болезни.
Генеративный ИИ может помочь в идентификации местоположения и серьезности вредителей, болезней и сорняков на основе исторических данных и environmental параметров и выборе наиболее подходящего пестицида, одновременно предоставляя оптимальную дозу и время использования.
5.3. Меры предосторожности при применении пестицидов
Для того чтобы использовать пестициды более точно, эффективно и устойчиво, необходимо принимать множество мер предосторожности.
1. Аппликаторы должны носить appropriate защитное снаряжение, такое как защитная одежда, перчатки, маски для лица и защитные очки, чтобы избежать прямого контакта с пестицидами на коже и в глазах, и они должны немедленно мыть руки и лицо после распыления. Крайне важно, чтобы излишки пестицидов и их упаковка утилизировались appropriately. Кроме того, контейнеры для пестицидов не должны использоваться для any другой цели, и должны соблюдаться местные правила, касающиеся утилизации отходов пестицидов. Кроме того, целесообразно получить знания о процедурах первой помощи и ознакомиться с деталями контактов для чрезвычайных ситуаций. Кроме того, рекомендуется заранее обеспечить наличие воды и мыла для мытья после непреднамеренного контакта;
2. Нецелесообразно предпринимать операции по распылению во время повышенной активности опыляющих насекомых, такой как observed у пчел. Для обеспечения защиты нецелевых и полезных организмов необходимо проявлять должную осторожность в этом отношении;
3. Для некоторых растений пестициды могут применяться непосредственно к корням растения через систему орошения, что может улучшить использование пестицидов [175,176], но корневое орошение может представлять больший потенциальный риск, чем распыление [177];
4. Пестициды могут быть введены непосредственно в растение для некоторых крупных деревьев или specific культур для контроля вредителей или болезней. Этот метод может значительно сократить количество используемых пестицидов и загрязнение окружающей среды [178,179,180];
5. Когда два или более пестицидов смешиваются, существует риск, что их взаимодействия могут привести к снижению эффективности или неэффективности. Это известно как антагонизм, который влияет на эффект контроля и может вызвать экономические потери и environmental проблемы. Например, цигалофоп-бутил, гербицид, используемый для контроля послевсходовых сорняков риса, антагонизируется некоторыми гербицидами, применяемыми simultaneously [181]. Кроме того, спиродiclofen взаимодействует с имидаклопридом и проявляет антагонизм к акарицидному эффекту на Brevipalpus californicus при смешивании [182]. Следовательно, стратегии распыления пестицидов должны корректироваться в соответствии с механизмом устойчивости к пестицидам у вредителей, болезней и сорняков. Пестициды с разными механизмами действия должны чередоваться, или должны использоваться стратегии смешанного распыления, чтобы замедлить развитие устойчивости.
5.4. Карта предписания пестицидов
Ключевая концепция распыления пестицидов на основе карт предписаний заключается в использовании детальных пространственных данных для генерации «карт предписаний», которые дифференцируют распыление пестицидов в соответствии с specific потребностями разных областей. Карта предписаний использует оборудование (например, Лидар, кинематику в реальном времени, RTK, дроны и т.д.) для сбора детальных данных о поле или саду, включая топографию, характеристики полога и состояние растительности [183]. Собранные данные преобразуются в цифровые карты в ГИС, которые анализируются алгоритмами для генерации 3D или 2D карт предписаний для потребностей растений в разных регионах. Дифференцированное распыление пестицидов проводится на основе карты предписаний. Распыление пестицидов может осуществляться с использованием автоматизированного оборудования (например, дроны для точного распыления [184] или самоходные тракторы). Во время процесса применения объем распыления и диапазон регулируются в любое время через обратную связь данных в реальном времени и мониторинг сенсоров для достижения наилучших результатов [185]. После распыления пестицидов эффект борьбы с вредителями оценивается путем последующего сбора данных и анализа для оптимизации следующего раунда стратегии применения.
Захваченные цветные изображения сначала преобразуются в оттенки серого, а затем модель RGB преобразуется в HSV. Метод максимальной межклассовой дисперсии используется для выполнения динамической сегментации порога на изображениях в оттенках серого с ultra-green признаками для получения бинарных изображений хлопка и сорняков, соответственно. Затем уровень пестицидов и разделение сетки определяются на основе координат центра масс сорняков и площади листьев, и генерируется карта предписаний. Результаты одного исследования показали, что система точного распыления пестицидов на основе карты предписаний может эффективно повысить использование пестицидов и сократить их использование [186].
В областях с низкой жизнеспособностью растений плотность популяций вредителей также tends to be низкой, поэтому была разработана карта предписаний для применения различных дозировок инсектицидов в разных областях в соответствии с уровнем жизнеспособности растений для достижения цели уничтожения вредителей и одновременного сокращения количества инсектицидов [187].
Путем мониторинга и анализа среды обитания саранчи можно проанализировать распределение саранчи и скорректировать карту распределения в соответствии со статусом в реальном времени для создания карты зонирования уровня заражения саранчой. Затем, combined с фактической ситуацией контроля саранчи в разных регионах, карта предписаний точного распыления пестицидов с воздуха и карта предписаний точного распыления пестицидов с земли, включая навигационный трек и информацию о переменном распылении пестицидов, могут достичь точного контроля распыления пестицидов на большой площади и значительно сократить остатки пестицидов [188].
В одном исследовании была established математическая модель между высотой полога культуры и количеством распыления пестицидов, информация о высоте растений, идентифицированная Лидаром, была передана в систему переменного распыления пестицидов для генерации карты предписаний объема распыления, и она была отправлена в ШИМ-контроллер, который изменял открытие и закрытие соленоидного клапана в реальном времени для изменения объема распыления, чтобы достичь цели точного переменного распыления пестицидов [189].
В целом, ИПРП в сельском хозяйстве эффективно контролирует вредителей, болезни и сорняки через integrated применение выбора пестицидов, расчета дозы и appropriate времени и метода распыления, одновременно минимизируя негативное воздействие на окружающую среду, greatly повышая эффективность и использование пестицидов. В то же время, использование ГИС, сенсорных технологий, автоматизированного оборудования и применение БПЛА, интеллектуальных систем мониторинга и других современных инструментов для достижения дифференцированного точного распыления пестицидов в разных регионах и растениях further улучшит точность и эффективность распыления пестицидов, significantly уменьшая загрязнение пестицидами окружающей среды и отходы. ИПРП в сельском хозяйстве станет мощной движущей силой для развития современного сельского хозяйства в направлении более эффективного, экологически чистого и интеллектуального развития.
6. Уровень реализации и контроля
На уровне реализации и контроля важную роль играют навигация, позиционирование, технология автоматического вождения, точное распыление и технология контроля характеристик капель. Использование технологии навигации и позиционирования на основе глобальной навигационной спутниковой системы (GNSS) и технологии автоматического вождения позволяет реализовать эффективные и точные интеллектуальные операции по защите растений. Технология точного распыления оптимизирует использование пестицидов и удобрений с помощью передовых сенсоров и систем управления для защиты здоровья растений и безопасности окружающей среды. Между тем, технология контроля характеристик капель улучшает эффективность распыления пестицидов за счет контроля размера, плотности и распределения капель.
6.1. Технология автоматического управления транспортным средством
При минимальном вмешательстве человека технология автоматического управления транспортным средством использует передовые сенсоры, принятие решений и системы управления, чтобы позволить различным транспортным средствам autonomously выполнять задачи, такие как навигация, позиционирование и автономное вождение. Среди них технология навигации и позиционирования в основном relies на GNSS, включая Глобальную систему позиционирования (GPS) США [190], Навигационную спутниковую систему Китая (BDS), Глобальную навигационную спутниковую систему России (GLONASS) [191] и Спутниковую систему навигации Европейского Союза Galileo (Galileo) [192]. Технологии автономного вождения, включая технологии беспилотного вождения, позволяют сельскохозяйственной технике autonomously перемещаться и работать в поле. Эти технологии могут предоставлять точную геолокационную информацию для сельскохозяйственной техники, позволяя рабочим органам следовать по predetermined путям и местоположениям, уменьшая необходимость ручных операций и повышая точность и эффективность операций, thus позволяя точное внесение удобрений, посев и распыление пестицидов.
6.1.1. Точное позиционирование и картирование земельных участков
Технология навигации и позиционирования может предоставлять точную географическую информацию о местоположении для каждой точки в пределах сельскохозяйственных угодий. Высокоточное позиционирование гарантирует, что сельскохозяйственная техника может точно достичь predetermined местоположения, уменьшая отходы пестицидов и избегая повреждения нецелевых культур [193].
Точное картирование участков проводится с использованием технологии навигации и позиционирования для получения точных границ, площади и топографической информации и генерации высокоточных цифровых карт участков. Эти карты могут быть использованы для планирования путей распыления пестицидов и обеспечения того, чтобы пестицид покрывал все области, подлежащие обработке [194].
6.1.2. Планирование маршрута для применения пестицидов и навигационное распыление пестицидов
На основе результатов картирования, ширины распыления оборудования для применения и appropriate перекрытия, может быть planned оптимальный путь движения транспортного средства, и проектирование и управление стратегией распыления могут быть carried out с использованием программного обеспечения GIS Pro 3.4 в combination с данными GNSS. Этот метод не только регулирует количество применяемых пестицидов в соответствии с specific условиями участка, но и уменьшает площадь перекрытого или пропущенного распыления, thus повышая эффективность и точность распыления пестицидов [195,196]. Транспортное средство для распыления, оснащенное навигационными системами (например, БПЛА, самоходные тракторы и т.д.), может распылять пестициды точно в соответствии с designed стратегией применения, further обеспечивая точность и эффективность [197,198].
6.1.3. Автоматическое вождение и избегание препятствий
Система автоматического вождения использует технологию навигации и позиционирования, чтобы гарантировать, что оборудование для распыления пестицидов может automatically перемещаться по сельскохозяйственным угодьям в соответствии с predetermined маршрутом. В combination с ГИС-предустановленными маршрутами распыления пестицидов, система автоматического вождения может точно контролировать путь сельскохозяйственной техники, чтобы гарантировать, что каждая культура получает правильное количество пестицида [199].
Кроме того, оборудование для распыления пестицидов оснащено различными сенсорами, такими как радар, Лидар и камеры, которые могут контролировать окружающую среду в реальном времени, automatically идентифицировать препятствия и выполнять избегание препятствий, чтобы обеспечить безопасность операции применения пестицидов. Между тем, система также может контролировать рабочее состояние оборудования и количество применяемого пестицида в реальном времени, чтобы обеспечить точность и надежность операции применения.
6.2. Технология точного распыления
Технологии переменного нормированного распыления, профильного распыления, целевого распыления и анти-дрейфового распыления все подпадают под категорию технологии ИПРП. Все эти технологии направлены на оптимизацию использования пестицидов или других агрохимикатов путем улучшения точности распыления, увеличения урожайности культур, обеспечения здорового роста растений и сокращения потерь ресурсов и загрязнения окружающей среды. Временная шкала развития от ручного опрыскивателя до интеллектуальных технологий распыления показана на Рисунке 8.
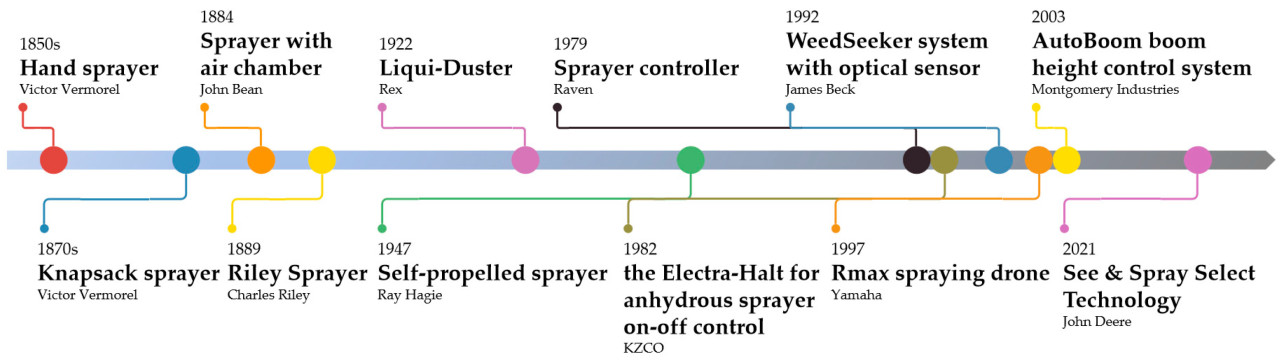
Рисунок 8. Временная шкала развития интеллектуальных технологий распыления
6.2.1. Переменное нормированное распыление
Технология переменного нормированного распыления адаптирует объемы распыления и стратегии к specific потребностям разных регионов, мониторя состояние целевых растений и почвы в реальном времени [200,201]. Эта технология обычно relies на передовых сенсорах, GNSS и системах ГИС для precise контроля объема распыления, чтобы гарантировать, что каждая область получает оптимальное количество необходимых ей пестицидов.
6.2.2. Профильное распыление
Профильное распыление — это технология, которая automatically регулирует высоту штанги распылителя в ответ на изменения высоты растений или рельефа, чтобы поддерживать оптимальное расстояние между распылительной насадкой и целевым растением или землей [202,203]. Это обеспечивает равномерное покрытие распылением и уменьшает снос пестицидов, повышая эффективность распыления и уменьшая воздействие на окружающую среду.
6.2.3. Целевое распыление
Целевая технология фокусируется на точной идентификации культур и сорняков и распылении только на растения, которые need to be обработаны [204,205]. Эта техника обычно сочетает распознавание изображений и алгоритмы ИИ и может significantly сократить используемые пестициды, одновременно защищая культуру от нецелевого распыления.
6.2.4. Анти-дрейфовое распыление
Анти-дрейфовое распыление уменьшает снос во время распыления путем улучшения конструкции насадки для контроля сноса капель, регулировки размера капель и оптимизации параметров распыления. Эта технология гарантирует, что распыленный пестицид достигает целевой области более точно, уменьшая воздействие на окружающую среду и нецелевые культуры [206,207,208,209].
Эффективность различных интеллектуальных технологий распыления показана в Таблице 3.
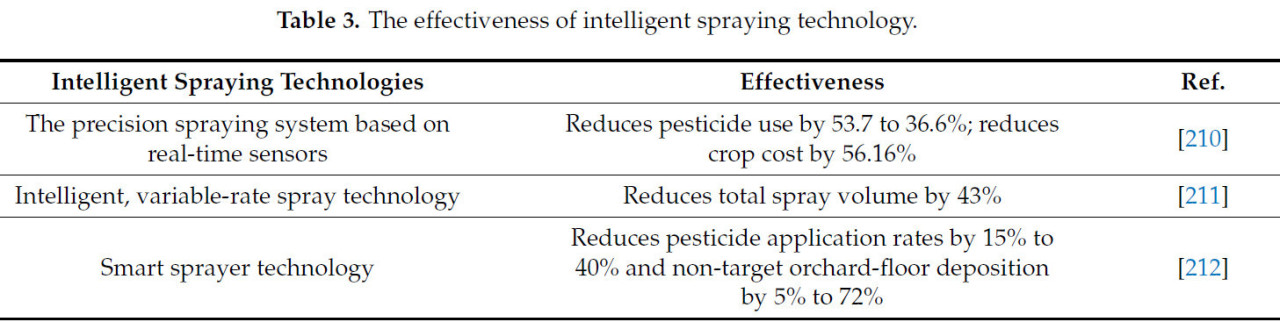
Таблица 3. Эффективность интеллектуальной технологии распыления
6.3. Технология контроля характеристик капель
Технология контроля характеристик капель имеет большое значение для повышения эффективности применения сельскохозяйственных химических пестицидов, уменьшения загрязнения окружающей среды и защиты здоровья растений. Размер, плотность и распределение капель напрямую влияют на покрытие, проникающую способность и потери на испарение пестицидов. Поэтому точный контроль характеристик капель может significantly улучшить качество и эффективность сельскохозяйственного производства.
6.3.1. Ключевые элементы технологии контроля характеристик капель
Диаметр капель является ключевым фактором в скорости осаждения и покрытия. Меньшие капли могут улучшить покрытие, но также более подвержены сносу из-за ветра, увеличивая потенциальный риск для окружающей среды. Поэтому выбор правильного размера капель обеспечивает эффективность распыления и уменьшает воздействие на окружающую среду [213,214,215,216].
Плотность осаждения капель относится к количеству капель на единицу площади, напрямую влияя на равномерное распределение и действие пестицида. Appropriate плотность осаждения помогает обеспечить эффективную концентрацию пестицидов на листве культур и избежать потерь или вреда пестицида.
Равномерность распределения капель относится к концентрации или дисперсии распределения капель, которая может быть выражена относительной спектральной шириной, коэффициентом диффузии и коэффициентом вариации. Равномерное распределение капель может гарантировать, что каждая культура может получить достаточное покрытие пестицидами для повышения эффекта контроля.
Асимметрия распределения капель описывает симметрию распределения размеров капель, а эксцесс распределения капель описывает остроту распределения капель и толщину хвоста [217]. Производительность системы распыления пестицидов и эффект распыления могут быть оценены путем анализа эксцесса и асимметрии распределения капель. Например, распределение размеров капель, близкое к нормальному (низкий эксцесс и асимметрия, близкая к нулю), может быть желательным для применений, требующих равномерного покрытия каплями.
6.3.2. Традиционная технология контроля капель
Размер капель и форма распыления могут быть adjusted путем улучшения конструкции насадки, например, путем использования разных форм, размеров и материалов насадок. Регулировка рабочего давления оборудования для распыления также может изменять размер капель и скорость распыления. Специфические поверхностно-активные вещества или другие добавки могут изменять поверхностное натяжение жидкости, что влияет на формирование и размер капель.
Гидродинамическое распыление — это выдавливание жидкости под высоким давлением через одно или несколько small отверстий (насадок) для формирования капель. Диаметр капель может быть adjusted путем изменения параметров, таких как размер насадки, давление подачи и природа жидкости. В частности, давление жидкости при прохождении через насадку может изменяться путем регулировки выходного давления насоса или с помощью регулирующего клапана давления [218]. Обычно, чем выше давление жидкости, тем меньше генерируемые капли [205]. Гидравлическая распылительная насадка проста по структуре [219], проста в использовании и недорога, и она широко используется для распыления пестицидов. Однако гидродинамическое распыление имеет certain требования к вязкости и другим физическим свойствам жидкости, и полученный диапазон распределения размеров капель wide [220], что может не соответствовать требованиям тонкого распыления для динамической регулировки диаметра капель.
6.3.3. Умная технология контроля капель
Пьезоэлектрическое ультразвуковое распыление использует обратный пьезоэлектрический эффект пьезоэлектрической керамики для генерации механических колебаний под действием электрического поля [221]. Когда частота колебаний становится excessive, она передается жидкости, контактирующей с ней, и жидкость распыляется в крошечные капли через кавитационный эффект [222] или эффект поверхностной волны [223]. На Рисунке 9 показана схематическая диаграмма ультразвукового распылителя, состоящего из сэндвич-преобразователя и переменного амплитудного стержня. Регулировка частоты и мощности колебаний ультразвука позволяет динамически и continuously регулировать диаметр капель в certain диапазоне. Чем выше частота, тем меньше производимые капли [224], и чем выше мощность, тем выше эффективность распыления [225]. Пьезоэлектрическое ультразвуковое распыление может производить микронные/субмикронные капли [226]; для водных пестицидов, таких как жидкости с низкой вязкостью, ультразвуковое распыление производит капли с размерами частиц обычно в диапазоне 1–100 мкм, с узкими распределениями размеров капель, хорошей однородностью и relatively низким энергопотреблением. Однако стоимость оборудования для пьезоэлектрического ультразвукового распыления высока, и физические и химические свойства жидкости имеют certain требования; некоторые растворы не подходят для ультразвукового распыления. Кроме того, prolonged работа может привести к перегреву пьезоэлектрической керамики, сокращая срок службы;
Распыление с газовой поддержкой позволяет жидкости встречаться с высокоскоростным потоком газа в насадке или устройстве распыления и использовать силу сдвига газа, турбулентный эффект или перепад давления для распыления жидкости в крошечные капли [227]. Разрыв и измельчение капель во время процесса распыления могут контролироваться путем регулировки параметров, таких как скорость потока газа и давление [228], а также скорость потока жидкости и давление [229], позволяя регулировать диаметр капель. Более высокие скорости потока газа или давления обычно производят меньшие капли [230];
Центробежные распылительные насадки используют вращающийся распылительный диск (или вращающееся колесо или вращающуюся клетку), чтобы позволить жидкости, доставляемой в центр высокоскоростного вращающегося диска, выбрасываться наружу от центра центробежной силой и формировать капли, когда она покидает край [215]. Регулировка диаметра капель может быть достигнута путем регулировки скорости вращения распылительного диска [231] и путем замены распылительного диска [232] с different количеством зубьев. В целом, центробежное распыление может производить капли в диапазоне от десятка микрон до about ста микрон, покрывая довольно wide диапазон диаметров, и yet трудно достичь субмикронного уровня. Распыление жидкостей с использованием вращающегося диска easy to operate, не требует внешнего давления или потока газа и может обрабатывать большие количества жидкостей [233]. Поэтому центробежное распыление широко используется в авиационном применении пестицидов [234]. Однако размер капель в основном зависит от скорости вращения, resulting в limited диапазоне регулировки диаметра капель [235];
Электростатическое распыление — это когда заряженная жидкость в высоковольтном электростатическом поле подвергается combination поверхностного натяжения, гравитации и электростатической силы, resulting в extremely нестабильной поверхности капли и расщеплении на капли. Размер и распределение капель могут контролироваться путем регулировки напряжения. Более высокие напряжения typically производят меньшие, более равномерно распределенные капли. Электростатические техники распыления также могут быть использованы для регулировки направления полета и диапазона распределения капель путем изменения layout электрического поля.
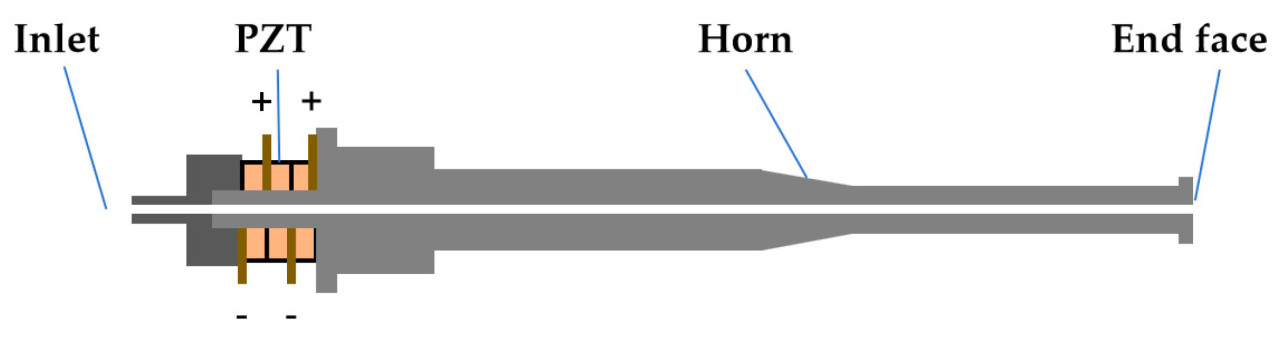
Рисунок 9. Ультразвуковая распылительная насадка.
Комбинированные навигация, позиционирование, технологии автоматического вождения, технологии точного распыления и технологии контроля характеристик капель представляют собой передовой край современного точного земледелия. Предоставляя точную информацию о местоположении, интеллектуальное планирование операционных путей и эффективные стратегии распыления пестицидов greatly повышают эффективность и точность сельскохозяйственного производства и сокращают потери ресурсов и загрязнение окружающей среды. Точное картирование участков и планирование путей распыления пестицидов обеспечивает комплексное покрытие управления сельскохозяйственными угодьями, в то время как технологии автоматического вождения и избегания препятствий обеспечивают безопасность и гибкость операций. Между тем, технология переменного нормированного распыления и технология профильного распыления для different потребностей растений и условий почвы further оптимизируют использование сельскохозяйственных ресурсов. С помощью современной технологии контроля характеристик капель сельскохозяйственные производители могут применять пестициды более scientifically, significantly улучшая качество и эффективность сельскохозяйственного производства. С continuous развитием технологий, эти технологии точного земледелия будут продолжать продвигать развитие сельского хозяйства в направлении высокой эффективности, интеллектуальности и экологической защиты и внесут важный вклад в устойчивое развитие глобального сельского хозяйства.
7. Перспективы исследований
С глобальным изменением климата и растущим спросом на сельскохозяйственное производство, контроль за вредителями, болезнями и сорняками сталкивается с огромными проблемами. Традиционные методы контроля больше не могут удовлетворять потребностям современного сельскохозяйственного производства в эффективности, экологической безопасности и устойчивом развитии. Поэтому разработка ключевых технологий для ИПРП стала важной мерой для решения этой проблемы. Системы ИПРП могут достичь ранней идентификации, точного позиционирования и персонализированного контроля вредителей, болезней и сорняков, что не только повышает эффективность и действенность контроля, но и greatly сокращает использование пестицидов и воздействие на окружающую среду. Кроме того, интеллектуальный анализ данных и поддержка принятия решений могут предоставить научные и разумные предложения по профилактике и контролю для сельскохозяйственного производства, further повышая интеллектуальный уровень сельскохозяйственного производства.
Однако внедрение технологии ИПРП сталкивается со значительными проблемами в нескольких областях. Сбор данных и обеспечение качества имеют постоянные проблемы с точностью, надежностью и согласованностью полевых данных, particularly при работе с разнообразными environmental условиями и интеграцией многоисточниковых данных. Возможности обработки информации в настоящее время ограничены недостаточной обобщающей способностью модели и неэффективной обработкой в реальном времени разнообразных данных о вредителях и болезнях. Кроме того, система сталкивается со значительными проблемами в генерации предписаний и поддержке принятия решений, включая трудности в разработке персонализированных планов лечения и интеграции multiple источников данных для эффективного принятия решений. Аспекты реализации и контроля также представляют значительные препятствия, particularly в достижении точных операций распыления с переменным расходом и поддержании consistent характеристик капель во время применения.
В будущем, с continuous интеграцией и применением передовых технологий, таких как ИИ, большие данные, IoT, дистанционное зондирование и т.д., контроль за вредителями, болезнями и сорняками迎来 revolutionary изменение. Все kinds технологии сбора целевой информации, технологии обработки информации и технологии реализации и контроля в технологии распыления для защиты растений будут глубоко интегрированы с интеллектуальным сельским хозяйством и prescription сельским хозяйством, и будет построена новая система ИПРП путем further преодоления слабых звеньев на каждом техническом уровне. В contrast, будет построена новая платформа интеллектуальной защиты растений с быстрым развитием интернета и технологии больших данных. Здесь мы выдвигаем перспективы развития ключевых технологий ИПРП для борьбы с вредителями, болезнями и сорняками в будущем с четырех точек зрения:
На уровне сбора целевой информации следует изучать системы сбора информации на основе характеристик вредителей, болезней и сорняков: исследование multiple системы сбора информации, которая использует низколетящие БПЛА, несущие платформы дистанционного зондирования, системы захвата изображений, акустические волновые сенсоры и другие fusion технологии для комплексного сбора информации о данных поражения растений; исследование системы, которая может мгновенно обнаруживать ситуацию заражения растений, получать доступ в реальном времени к состоянию роста растений в разное время с помощью технологии сбора целевой информации, construction сельскохозяйственных больших данных и comparing характеристики роста целевых растений в области мониторинга с характеристиками здоровых растений для анализа серьезности влияния повреждения пестицидами; исследование establishing стандартизированных протоколов сбора данных и систем контроля качества; и исследование разработки алгоритмов проверки данных в реальном времени и коррекции ошибок;
На уровне обработки информации требуется модель multi-task распознавания вредителей, болезней и сорняков, а также исследование построения модели принятия решений для ИПРП, которая может идентифицировать позиционирование вредителей, болезней и сорняков в certain области одновременно; исследование integrated классификации модели позиционирования вредителей, болезней и сорняков, обучение модели с собранными данными изображений болезней, вредителей и сорняков для улучшения ее способности к обобщению и достижения multi-функциональности для реализации multi-функциональных задач идентификации, чтобы сократить расходы на оборудование и дополнительное рабочее время сельскохозяйственного оборудования; исследование generative ИИ для генерации большого количества изображений и спектральных данных вредителей, болезней и сорняков для continuous улучшения модели; и исследование развертывания эффективных алгоритмов обработки в реальном времени с механизмами обеспечения качества;
На уровне предписывающего распыления пестицидов должна быть построена система поддержки принятия решений на основе generative ИИ для предписания вредителей, болезней и сорняков: использование наземного IoT в combination с БПЛА и спутниковым дистанционным зондированием для достижения всепогодного доступа к сельскохозяйственной информации; построение базы данных исторической информации о бедствиях, исторической погоде и environmental информации, и типов вредителей, и сорняков, и пестицидов; загрузка относительной информации на глобальную платформу обмена сельскохозяйственной информацией для содействия глобальному сотрудничеству и локализованной оптимизации стратегий; построение динамической экологической модели на основе generative ИИ и системы генерации предписаний для ИПРП путем изучения большого количества данных о вредителях, болезнях и сорняках и методов контроля; создание виртуальных моделей с generative ИИ для имитации сельскохозяйственной среды и процесса развития вредителей, болезней и сорняков в ответ на возможные ситуации бедствий для исследователей или фермеров, чтобы наблюдать эффекты контроля different стратегий контроля и экологические impacts и давать персонализированные предписания для новых комбинаций пестицидов; интеграция слияния многоисточниковых данных с наземного IoT, БПЛА и спутников; и включение персонализированных рекомендаций по предписаниям с quantification неопределенности;
На уровне реализации и контроля следует разрабатывать технику ИПРП: прорыв в существующую площадь полога культур на основе технического узкого места операций распыления с переменным расходом, а также разработка и профилирование и целевая интеллектуальная техника, которая может достичь реального времени переменного расхода, переменного давления для different диапазона и переменного направления распыления на основе сортов растений, плотностей и типов и местоположений вредителей, болезней и сорняков при условии constant размера капель.
В заключение, будущее развитие технологии ИПРП для борьбы с вредителями, болезнями и сорняками будет многомерным и комплексным. В то же время, поддержка политики, междисциплинарное сотрудничество и осведомленность общественности также являются важными факторами в продвижении развития этой технологии, которая будет greatly способствовать развитию сельскохозяйственного производства в направлении более эффективного, экологически чистого и устойчивого развития и внесет важный вклад в глобальную продовольственную безопасность и экологическую защиту окружающей среды.
Ссылки
1. Wu, Z.; Wang, Z.; Spohrer, K. Non-contact leaf wetness measurement with laser-induced light reflection and RGB imaging. Biosyst. Eng. 2024, 244, 42–52. [Google Scholar] [CrossRef]
2. Zheng, J.; Xu, Y. Development and Prospect in Environment-friendly Pesticide Sprayers. Trans. Chin. Soc. Agric. Mach. 2021, 52, 1–16. [Google Scholar]
3. Andrade, P.B.; Cruvinel, P.E.; Peñaloza, E. Module for Virtual Calibration of Sensors of Agricultural Spraying Systems (temperature, pressure and flow) Using an Arduino-based Architecture and a Controller Area Network Bus (CAN). In Proceedings of the 12th IEEE International Conference on Semantic Computing (ICSC), Laguna Hills, CA, USA, 31 January–2 February 2018; pp. 352–357. [Google Scholar]
4. Liu, H.; Li, N.; Shen, Y.; Xu, H. Spray target detection based on laser scanning sensor and real-time correction of IMU attitude angle. Trans. Chin. Soc. Agric. Eng. 2017, 33, 88–97. [Google Scholar]
5. Yuan, L.; Pu, R.; Zhang, J.; Wang, J.; Yang, H. Using high spatial resolution satellite imagery for mapping powdery mildew at a regional scale. Precis. Agric. 2016, 17, 332–348. [Google Scholar] [CrossRef]
6. Librán-Embid, F.; Klaus, F.; Tscharntke, T.; Grass, I. Unmanned aerial vehicles for biodiversity-friendly agricultural landscapes—A systematic review. Sci. Total Environ. 2020, 732, 139204. [Google Scholar] [CrossRef] [PubMed]
7. Albetis, J.; Duthoit, S.; Guttler, F.; Jacquin, A.; Goulard, M.; Poilvé, H.; Féret, J.B.; Dedieu, G. Detection of Flavescence dorée grapevine disease using unmanned aerial vehicle (UAV) multispectral imagery. Remote Sens. 2017, 9, 308. [Google Scholar] [CrossRef]
8. Lu, J.; Zhou, M.; Gao, Y.; Jiang, H. Using hyperspectral imaging to discriminate yellow leaf curl disease in tomato leaves. Precis. Agric. 2018, 19, 379–394. [Google Scholar] [CrossRef]
9. Hunter, J.E.; Gannon, T.W.; Richardson, R.J.; Yelverton, F.H.; Leon, R.G. Integration of remote-weed mapping and an autonomous spraying unmanned aerial vehicle for site-specific weed management. Pest Manag. Sci. 2020, 76, 1386–1392. [Google Scholar] [CrossRef] [PubMed]
10. Maslekar, N.V.; Kulkarni, K.P.; Chakravarthy, A.K. Application of unmanned aerial vehicles (UAVs) for pest surveillance, monitoring and management. In Innovative Pest Management Approaches for the 21st Century: Harnessing Automated Unmanned Technologies; Springer: Singapore, 2020; pp. 27–45. [Google Scholar]
11. Singh, V.; Bagavathiannan, M.; Chauhan, B.S.; Singh, S. Evaluation of current policies on the use of unmanned aerial vehicles in Indian agriculture. Curr. Sci. 2019, 117, 25–29. [Google Scholar] [CrossRef]
12. Restrepo-Arias, J.F.; Branch-Bedoya, J.W.; Awad, G. Image classification on smart agriculture platforms: Systematic literature review. Artif. Intell. Agric. 2024, 13, 1–17. [Google Scholar] [CrossRef]
13. Krestenitis, M.; Raptis, E.K.; Kapoutsis, A.C.; Ioannidis, K.; Kosmatopoulos, E.B.; Vrochidis, S. Overcome the Fear Of Missing Out: Active sensing UAV scanning for precision agriculture. Robot. Auton. Syst. 2024, 172, 104581. [Google Scholar] [CrossRef]
14. Zhang, C.; Li, C.; He, M.; Cai, Z.; Feng, Z.; Qi, H.; Zhou, L. Leaf water content determination of oilseed rape using near-infrared hyperspectral imaging with deep learning regression methods. Infrared Phys. Technol. 2023, 134, 104921. [Google Scholar] [CrossRef]
15. Ahmad, M.N.; Shariff, A.; Moslim, R. Monitoring insect pest infestation via different spectroscopic techniques. Appl. Spectrosc. Rev. 2018, 53, 836–853. [Google Scholar] [CrossRef]
16. Yones, M.; Khdery, G.A.; Aboelghar, M.; Kadah, T.; Mamoun, S.A.M. Early detection of the Mediterranean Fruit Fly, Ceratitis capitata (Wied.) in oranges using different aspects of remote sensing applications. Egypt. J. Remote Sens. Space Sci. 2023, 26, 798–806. [Google Scholar] [CrossRef]
17. Mei, L.; Guan, Z.G.; Zhou, H.J.; Lv, J.; Zhu, Z.R.; Cheng, J.A.; Chen, F.J.; Löfstedt, C.; Svanberg, S.; Somesfalean, G. Agricultural pest monitoring using fluorescence lidar techniques Feasibility study. Appl. Phys. B-Lasers Opt. 2012, 106, 733–740. [Google Scholar] [CrossRef]
18. Wang, A.; Zhang, W.; Wei, X. A review on weed detection using ground-based machine vision and image processing techniques. Comput. Electron. Agric. 2019, 158, 226–240. [Google Scholar] [CrossRef]
19. Ye, H.; Lang, R.; Liu, C.; Li, M. Recognition of cucumber downy mildew disease based on visual saliency map. Trans. Chin. Soc. Agric. Mach. 2016, 47, 270–274. [Google Scholar]
20. Lian, Y.Y.; Wang, A.Q.; Zeng, B.; Yang, H.M.; Li, J.L.; Peng, S.H.; Zhou, S.H. Identification of male and female pupal characteristics of Zeugodacus cucurbitae (Coquillett) via machine vision. PLoS ONE 2022, 17, e0264227. [Google Scholar] [CrossRef] [PubMed]
21. Srinivas, L.; Bharathy, A.; Ramakuri, S.K.; Sethy, A.; Kumar, R. An optimized machine learning framework for crop disease detection. Multimed. Tools Appl. 2023, 83, 1539–1558. [Google Scholar] [CrossRef]
22. Zou, K.; Ge, L.; Zhou, H.; Zhang, C.; Li, W. Broccoli Seedling Pest Damage Degree Evaluation Based on Machine Learning Combined with Color and Shape Features. Inf. Process. Agric. 2021, 8, 505–514. [Google Scholar] [CrossRef]
23. Ali, H.; Lali, M.I.; Nawaz, M.Z.; Sharif, M.; Saleem, B.A. Symptom based automated detection of citrus diseases using color histogram and textural descriptors. Comput. Electron. Agric. 2017, 138, 92–104. [Google Scholar] [CrossRef]
24. Zheng, Q.; Huang, W.J.; Xia, Q.; Dong, Y.Y.; Ye, H.C.; Jiang, H.; Chen, S.S.; Huang, S.Y. Remote Sensing Monitoring of Rice Diseases and Pests from Different Data Sources: A Review. Agronomy 2023, 13, 1851. [Google Scholar] [CrossRef]
25. Abd El-Ghany, N.M.; Abd El-Aziz, S.E.; Marei, S.S. A review: Application of remote sensing as a promising strategy for insect pests and diseases management. Environ. Sci. Pollut. Res. 2020, 27, 33503–33515. [Google Scholar] [CrossRef]
26. Zhang, J.C.; Huang, Y.B.; Pu, R.L.; Gonzalez-Moreno, P.; Yuan, L.; Wu, K.; Huang, W. Monitoring plant diseases and pests through remote sensing technology: A review. Comput. Electron. Agric. 2019, 165, 104943. [Google Scholar] [CrossRef]
27. Yang, C. Remote sensing and precision agriculture technologies for crop disease detection and management with a practical application example. Engineering 2020, 6, 528–532. [Google Scholar] [CrossRef]
28. Jorgensen, L.N.; Kudsk, P.; Orum, J.E. Links between pesticide use pattern and crop production in Denmark with special reference to winter wheat. Crop Prot. 2019, 119, 147–157. [Google Scholar] [CrossRef]
29. Maino, J.L.; Thia, J.; Hoffmann, A.A.; Umina, P.A. Estimating rates of pesticide usage from trends in herbicide, insecticide, and fungicide product registrations. Crop Prot. 2023, 163, 106125. [Google Scholar] [CrossRef]
30. Jordan, D.L.; Buol, G.S.; Brandenburg, R.L.; Shew, B.B.; Wilkerson, G.G.; Lassiter, B.R.; Dunne, J.; Gorny, A.; Washburn, D.; Hoisington, D.; et al. A Risk Tool and Production Log Created using Microsoft Excel to Manage Pests in Peanut (Arachis hypogaea). J. Integr. Pest Manag. 2022, 13, 9. [Google Scholar] [CrossRef]
31. Ren, S.; Chen, H.; Hou, J.; Zhao, P.; Dong, Q.; Feng, H. Based on historical weather data to predict summer field-scale maize yield: Assimilation of remote sensing data to WOFOST model by ensemble Kalman filter algorithm. Comput. Electron. Agric. 2024, 219, 108822. [Google Scholar] [CrossRef]
32. Xiao, D.; Pan, Y.; Feng, J.; Yin, J.; Liu, Y.; He, L. Remote sensing detection algorithm for apple fire blight based on UAV multispectral image. Comput. Electron. Agric. 2022, 199, 107137. [Google Scholar] [CrossRef]
33. Taiwo, B.E.; Kafy, A.A.; Samuel, A.A.; Rahaman, Z.A.; Ayowole, O.E.; Shahrier, M.; Duti, B.M.; Rahman, M.T.; Peter, O.T.; Abosede, O.O. Monitoring and predicting the influences of land use/land cover change on cropland characteristics and drought severity using remote sensing techniques. Environ. Sustain. Indic. 2023, 18, 100248. [Google Scholar] [CrossRef]
34. Jiang, X.; Zhen, J.; Miao, J.; Zhao, D.; Shen, Z.; Jiang, J.; Gao, C.; Wu, G.; Wang, J. Newly-developed three-band hyperspectral vegetation index for estimating leaf relative chlorophyll content of mangrove under different severities of pest and disease. Ecol. Indic. 2022, 140, 108978. [Google Scholar] [CrossRef]
35. Lassalle, G. Monitoring natural and anthropogenic plant stressors by hyperspectral remote sensing: Recommendations and guidelines based on a meta-review. Sci. Total Environ. 2021, 788, 147758. [Google Scholar] [CrossRef]
36. Neinavaz, E.; Schlerf, M.; Darvishzadeh, R.; Gerhards, M.; Skidmore, A.K. Thermal infrared remote sensing of vegetation: Current status and perspectives. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102415. [Google Scholar] [CrossRef]
37. Jones, H.G.; Serraj, R.; Loveys, B.R.; Xiong, L.Z.; Wheaton, A.; Price, A.H. Thermal infrared imaging of crop canopies for the remote diagnosis and quantification of plant responses to water stress in the field. Funct. Plant Biol. 2009, 36, 978–989. [Google Scholar] [CrossRef] [PubMed]
38. Zhou, X.; Chen, Z.; Wang, Z.; Sun, D.; Yang, L.; Yan, G.; Song, S. Effects of the soil moisture content and leaf memory effect on pesticide droplet absorption. Sci. Hortic. 2024, 329, 113040. [Google Scholar] [CrossRef]
39. Sinha, A.; Tan, W.K.; Li, Y.F.; McNairn, H.; Jiao, X.F.; Hosseini, M. Applying a particle filtering technique for canola crop growth stage estimation in Canada: Remote Sensing For Agriculture, Ecosystems, And Hydrology XIX. In Proceedings of the Conference on Remote Sensing for Agriculture, Ecosystems, and Hydrology, Warsaw, Poland, 11–14 September 2017; Neale, C., Maltese, A., Eds.; p. 10421. [Google Scholar]
40. Hunt, D.A.; Tabor, K.; Hewson, J.H.; Wood, M.A.; Reymondin, L.; Koenig, K.; Schmitt-Harsh, M.; Follett, F. Review of Remote Sensing Methods to Map Coffee Production Systems. Remote Sens. 2020, 12, 2041. [Google Scholar] [CrossRef]
41. Zou, K.L.; Wang, H.; Zhang, F.; Zhang, C.L.; Kai, D. Precision route planning method based on UAV remote sensing and genetic algorithm for weeding machine. Appl. Intell. 2023, 53, 11203–11213. [Google Scholar] [CrossRef]
42. Zhang, R.R.; Lian, S.K.; Li, L.L.; Zhang, L.H.; Zhang, C.C.; Chen, L.P. Design and experiment of a binocular vision-based canopy volume extraction system for precision pesticide application by UAVs. Comput. Electron. Agric. 2023, 213, 108197. [Google Scholar] [CrossRef]
43. Vanegas, F.; Bratanov, D.; Powell, K.; Weiss, J.; Gonzalez, F. A Novel Methodology for Improving Plant Pest Surveillance in Vineyards and Crops Using UAV-Based Hyperspectral and Spatial Data. Sensors 2018, 18, 260. [Google Scholar] [CrossRef] [PubMed]
44. Srivastava, A.; Prakash, J. Techniques, Answers, and Real-World UAV Implementations for Precision Farming. Wirel. Pers. Commun. 2023, 131, 2715–2746. [Google Scholar] [CrossRef]
45. Gu, C.C.; Zhai, C.Y.; Wang, X.; Wang, S.L. CMPC: An Innovative Lidar-Based Method to Estimate Tree Canopy Meshing-Profile Volumes for Orchard Target-Oriented Spray. Sensors 2021, 21, 4252. [Google Scholar] [CrossRef]
46. Liu, X.Y.; Wang, Y.X.; Kang, F.; Yue, Y.; Zheng, Y.J. Canopy Parameter Estimation of Citrus grandis var. Longanyou Based on LiDAR 3D Point Clouds. Remote Sens. 2021, 13, 1859. [Google Scholar] [CrossRef]
47. Mahmud, M.S.; Zahid, A.; He, L.; Choi, D.; Krawczyk, G.; Zhu, H.P. LiDAR-sensed tree canopy correction in uneven terrain conditions using a sensor fusion approach for precision sprayers. Comput. Electron. Agric. 2021, 191, 106565. [Google Scholar] [CrossRef]
48. Li, Q.; Zheng, J.; Zhou, H.; Zhang, H.; Shu, Y.; Xu, B. Online Measurement of Tree Canopy Volume Using Vehicle-borne 2-D Laser Scanning. Trans. Chin. Soc. Agric. Mach. 2016, 47, 309–314. [Google Scholar]
49. Martin, B.; Juliet, V.; Sankaranarayanan, P.E.; Gopal, A.; Rajkumar, I. Wireless implementation of mems accelerometer to detect red palm weevil on palms. In Proceedings of the International Conference on Advanced Electronic Systems, Pilani, India, 21–23 September 2013. [Google Scholar]
50. Mankin, R.W.; Smith, M.T.; Tropp, J.M.; Atkinson, E.B.; Jong, D.Y. Detection of Anoplophora glabripennis (Coleoptera: Cerambycidae) Larvae in Different Host Trees and Tissues by Automated Analyses of Sound-Impulse Frequency and Temporal Patterns. J. Econ. Entomol. 2008, 101, 838–849. [Google Scholar] [CrossRef]
51. Pinhas, J.; Soroker, V.; Hetzroni, A.; Mizrach, A.; Teicher, M.; Goldberger, J. Automatic acoustic detection of the red palm weevil. Comput. Electron. Agric. 2008, 63, 131–139. [Google Scholar] [CrossRef]
52. Leblanc, M.; Gaunt, D.; Fleurat-Lessard, F. Experimental study of acoustic equipment for real-time insect detection in grain bins—Assessment of their potential for infestation risk prediction during long term storage periods. IOBC WPRS Bull. 2011, 69, 79–88. [Google Scholar]
53. Pearson, T.C.; Cetin, A.E.; Tewfik, A.H.; Haff, R.P. Feasibility of impact-acoustic emissions for detection of damaged wheat kernels. Digit. Signal Process. 2007, 17, 617–633. [Google Scholar] [CrossRef]
54. Kim, K.; Lee, J.; Lee, S.; Yeo, H. Improvement of wood CT images by consideration of the skewing of ultrasound caused by growth ring angle. Wood Fiber Sci. 2008, 40, 572–579. [Google Scholar]
55. Markom, M.A.; Shakaff, A.Y.M.; Adom, A.H.; Ahmad, M.N.; Hidayat, W.; Abdullah, A.H.; Fikri, N.A. Intelligent electronic nose system for basal stem rot disease detection. Comput. Electron. Agric. 2009, 66, 140–146. [Google Scholar] [CrossRef]
56. Lampson, B.D.; Han, Y.J.; Khalilian, A.; Greene, J.K.; Degenhardt, D.C.; Hallstrom, J.O. Development of a portable electronic nose for detection of pests and plant damage. Comput. Electron. Agric. 2014, 108, 87–94. [Google Scholar] [CrossRef]
57. Cui, S.Q.; Inocente, E.; Acosta, N.; Keener, H.M.; Zhu, H.P.; Ling, P.P. Development of Fast E-nose System for Early-Stage Diagnosis of Aphid-Stressed Tomato Plants. Sensors 2019, 19, 3480. [Google Scholar] [CrossRef]
58. Brittany, D.L.; Ahmad, K.; Jeremy, K.G.; Young, J.H.; David, C.D. Development of a Portable Electronic Nose for Detection of Cotton Damaged by Nezara viridula (Hemiptera: Pentatomidae). J. Insects 2014, 2014, 1–8. [Google Scholar]
59. Wilson, A. Applications of Electronic-Nose Technologies for Noninvasive Early Detection of Plant, Animal and Human Diseases. Chemosensors 2018, 6, 45. [Google Scholar] [CrossRef]
60. Zheng, Z.; Zhang, C. Electronic noses based on metal oxide semiconductor sensors for detecting crop diseases and insect pests. Comput. Electron. Agric. 2022, 197, 106988. [Google Scholar] [CrossRef]
61. Alahmad, T.; Neményi, M.; Nyéki, A. Applying IoT Sensors and Big Data to Improve Precision Crop Production: A Review. Agronomy 2023, 13, 2603. [Google Scholar] [CrossRef]
62. Zou, X.G.; Liu, W.C.; Huo, Z.Q.; Wang, S.Y.; Chen, Z.L.; Xin, C.R.; Bai, Y.A.; Liang, Z.Y.; Gong, Y.; Qian, Y.; et al. Current Status and Prospects of Research on Sensor Fault Diagnosis of Agricultural Internet of Things. Sensors 2023, 23, 2528. [Google Scholar] [CrossRef]
63. Duguma, A.L.; Bai, X. Contribution of Internet of Things (IoT) in improving agricultural systems. Int. J. Environ. Sci. Technol. 2024, 21, 2195–2208. [Google Scholar] [CrossRef]
64. Tang, P.; Liang, Q.; Li, H.; Pang, Y.Y. Application of Internet-of-Things Wireless Communication Technology in Agricultural Irrigation Management: A Review. Sustainability 2024, 16, 3575. [Google Scholar] [CrossRef]
65. Quy, V.K.; Hau, N.V.; Anh, D.V.; Quy, N.M.; Ban, N.T.; Lanza, S.; Randazzo, G.; Muzirafuti, A. IoT-Enabled Smart Agriculture: Architecture, Applications, and Challenges. Appl. Sci. 2022, 12, 3396. [Google Scholar] [CrossRef]
66. Ojha, T.; Misra, S.; Raghuwanshi, N.S. Internet of Things for Agricultural Applications: The State of the Art. IEEE Internet Things J. 2021, 8, 10973–10997. [Google Scholar] [CrossRef]
67. Li, X.M.; Hou, B.F.; Zhang, R.H.; Liu, Y.X. A Review of RGB Image-Based Internet of Things in Smart Agriculture. IEEE Sens. J. 2023, 23, 24107–24122. [Google Scholar] [CrossRef]
68. Kalyani, Y.; Collier, R. A Systematic Survey on the Role of Cloud, Fog, and Edge Computing Combination in Smart Agriculture. Sensors 2021, 21, 5922. [Google Scholar] [CrossRef]
69. Qureshi, T.; Saeed, M.; Ahsan, K.; Malik, A.A.; Muhammad, E.S.; Touheed, N. Smart Agriculture for Sustainable Food Security Using Internet of Things (IoT). Wirel. Commun. Mob. Comput. 2022, 2022, 9608394. [Google Scholar] [CrossRef]
70. Wachowiak, M.P.; Walters, D.F.; Kovacs, J.M.; Wachowiak-Smolíková, R.; James, A.L. Visual analytics and remote sensing imagery to support community-based research for precision agriculture in emerging areas. Comput. Electron. Agric. 2017, 143, 149–164. [Google Scholar] [CrossRef]
71. Shafi, U.; Mumtaz, R.; Iqbal, N.; Zaidi, S.M.H.; Zaidi, S.A.R.; Hussain, I.; Mahmood, Z. A Multi-Modal Approach for Crop Health Mapping Using Low Altitude Remote Sensing, Internet of Things (IoT) and Machine Learning. IEEE Access 2020, 8, 112708–112724. [Google Scholar] [CrossRef]
72. Zhang, H.; Wang, L.; Jin, X.; Bian, L.; Ge, Y. High-throughput phenotyping of plant leaf morphological, physiological, and biochemical traits on multiple scales using optical sensing. Crop J. 2023, 11, 1303–1318. [Google Scholar] [CrossRef]
73. Shah, A.; Bangash, J.I.; Khan, A.W.; Ahmed, I.; Khan, A.; Khan, A.; Khan, A. Comparative analysis of median filter and its variants for removal of impulse noise from gray scale images. J. King Saud Univ.—Comput. Inf. Sci. 2022, 34, 505–519. [Google Scholar] [CrossRef]
74. Hamuda, E.; Glavin, M.; Jones, E. A survey of image processing techniques for plant extraction and segmentation in the field. Comput. Electron. Agric. 2016, 125, 184–199. [Google Scholar] [CrossRef]
75. Lu, C.; Arcega Rustia, D.J.; Lin, T. Generative Adversarial Network Based Image Augmentation for Insect Pest Classification Enhancement. IFAC-PapersOnLine 2019, 52, 1–5. [Google Scholar] [CrossRef]
76. Zhang, J.; Wang, X.; Yang, C.; Zhang, J.; He, D.; Song, H. Image dehazing based on dark channel prior and brightness enhancement for agricultural remote sensing images from consumer-grade cameras. Comput. Electron. Agric. 2018, 151, 196–206. [Google Scholar] [CrossRef]
77. Wu, J.; Xiang, L.; You, H.; Tang, L.; Gai, J. Plant-Denoising-Net (PDN): A plant point cloud denoising network based on density gradient field learning. ISPRS J. Photogramm. Remote Sens. 2024, 210, 282–299. [Google Scholar] [CrossRef]
78. Luo, Z.; Yang, W.; Yuan, Y.; Gou, R.; Li, X. Semantic segmentation of agricultural images: A survey. Inf. Process. Agric. 2024, 11, 172–186. [Google Scholar] [CrossRef]
79. Cheng, J.; Deng, C.; Su, Y.; An, Z.; Wang, Q. Methods and datasets on semantic segmentation for Unmanned Aerial Vehicle remote sensing images: A review. ISPRS J. Photogramm. Remote Sens. 2024, 211, 1–34. [Google Scholar] [CrossRef]
80. Raja, M.R.; Jayaraj, V.; Shajin, F.H.; Devi, E.M.R. Radial basis function Neural Network optimized with Salp Swarm algorithm espoused paddy leaf disease classification. Biomed. Signal Process. Control. 2023, 86, 105038. [Google Scholar]
81. Zhao, S.L.; Sun, X.T.; Gai, L.Y. Data enhancement and multi-feature learning model for pest classification. J. Intell. Fuzzy Syst. 2023, 45, 5409–5421. [Google Scholar] [CrossRef]
82. Nie, J.; Yuan, Y.C.; Li, Y.; Wang, H.T.; Li, J.B.; Wang, Y.; Song, K.L.; Ercisli, S. Few-shot Learning in Intelligent Agriculture: A Review of Methods and Applications. J. Agric. Sci.-Tarim Bilim. Derg. 2024, 30, 216–228. [Google Scholar] [CrossRef]
83. Sulistyo, S.B.; Woo, W.L.; Dlay, S.S.; Gao, B. Building a Globally Optimized Computational Intelligent Image Processing Algorithm for On-Site Inference of Nitrogen in Plants. IEEE Intell. Syst. 2018, 33, 15–26. [Google Scholar] [CrossRef]
84. Lamparelli, R.; Mercante, E.; Rocha, J.V.; Opazo, M.A. Impact of the normalization process on the spectral-temporal profile of soybean crops based on vegetation indexes. Int. J. Remote Sens. 2012, 33, 1605–1626. [Google Scholar] [CrossRef]
85. Wang, X.Y.; Shu, L.; Han, R.; Yang, F.; Gordon, T.; Wang, X.C.; Xu, H.Y. A Survey of Farmland Boundary Extraction Technology Based on Remote Sensing Images. Electronics 2023, 12, 1156. [Google Scholar] [CrossRef]
86. Dhiman, P.; Kaur, A.; Balasaraswathi, V.R.; Gulzar, Y.; Alwan, A.A.; Hamid, Y. Image Acquisition, Preprocessing and Classification of Citrus Fruit Diseases: A Systematic Literature Review. Sustainability 2023, 15, 9643. [Google Scholar] [CrossRef]
87. Wang, Z.B.; Cui, J.; Zhu, Y. Review of plant leaf recognition. Artif. Intell. Rev. 2023, 56, 4217–4253. [Google Scholar] [CrossRef]
88. Thenmozhi, K.; Reddy, U.S. Image Processing Techniques for Insect Shape Detection in Field Crops. In Proceedings of the International Conference on Inventive Computing and Informatics (ICICI 2017), Coimbatore, India, 23–24 November 2017; IEEE: New York, NY, USA; pp. 699–704. [Google Scholar]
89. Nasreen, P.N.; Kumar, A.C.; Nabeel, P.A. Automatic Classification of Monocots and Dicots using SVM Classifier. In Proceedings of the International Conference on Information Science (ICIS), Kochi, India, 12–13 August 2016; pp. 28–31. [Google Scholar]
90. Anton, C.A.; Matei, O.; Avram, A. Collaborative Data Mining in Agriculture for Prediction of Soil Moisture and Temperature. In Software Engineering Methods in Intelligent Algorithms, Proceeding of the 8th Computer Science On-Line Conference (CSOC), Online, 24–27 April 2019; Silhavy, R., Ed.; Springer: Cham, Switzerland, 2019; Volume 1, pp. 141–151. [Google Scholar]
91. Nie, J.; Wang, Y.; Li, Y.; Chao, X.W. Sustainable computing in smart agriculture: Survey and challenges. Turk. J. Agric. For. 2022, 46, 550–566. [Google Scholar] [CrossRef]
92. Song, L.M.; Liu, M.Y.; Liu, S.H.; Wang, H.Y.; Luo, J. Pest species identification algorithm based on improved YOLOv4 network. Signal Image Video Process. 2023, 17, 3127–3134. [Google Scholar] [CrossRef]
93. Dong, Z.G.; Li, L.; Wang, X.J.; Wang, G.C.; Gao, Y.; Wang, G.F. Tobacco pests monitoring system based on time sequence pattern mining. In Proceedings of the IEEE International Conference on Artificial Intelligence and Information Systems (ICAIIS), Dalian, China, 20–22 March 2020; pp. 122–125. [Google Scholar]
94. Sharma, R.P.; Ramesh, D.; Pal, P.; Tripathi, S.; Kumar, C. IoT-Enabled IEEE 802.15.4 WSN Monitoring Infrastructure-Driven Fuzzy-Logic-Based Crop Pest Prediction. IEEE Internet Things J. 2022, 9, 3037–3045. [Google Scholar] [CrossRef]
95. Worner, S.P.; Gevrey, M. Modelling global insect pest species assemblages to determine risk of invasion. J. Appl. Ecol. 2006, 43, 858–867. [Google Scholar] [CrossRef]
96. Hong, Y.; Lee, M.; Rim, H.; Do, Y.; Kim, S.C.; Bang, J.H.; Song, U. Development of a preliminary environmental risk assessment system by using text mining for introducing alien crops. J. Environ. Manag. 2022, 311, 114794. [Google Scholar] [CrossRef]
97. Hu, H.Y.; Su, C.; Yang, C.Y.; Yu, P. A Study on Intelligent Crop Disease and Pest Diagnosis System Based on Hadoop. In Proceedings of the 2019 International Conference on Robots and Intelligent System (ICRIS), Haikou, China, 15–16 June 2019; pp. 171–173. [Google Scholar]
98. Iordache, M.D.; Mantas, V.; Baltazar, E.; Lewyckyj, N.; Souverijns, N. Application of Random Forest Classification to Detect the Pine Wilt Disease from High Resolution Spectral Images: IGARSS 2020. In Proceedings of the 2020 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Waikoloa, HI, USA, 26 September–2 October 2020; pp. 4489–4492. [Google Scholar]
99. Zhang, L.B. Forecasting the Rice Stem Borer Occurrence Tendency based on Support Vector Machine. In Proceedings of the 2009 ISECS International Colloquium on Computing, Communication, Control, and Management (CCCM 2009), Sanya, China, 8–9 August 2009; Luo, Q., Yi, J., Bin, C., Eds.; Volume 3, pp. 356–359. [Google Scholar]
100. Yang, B.; Cao, W.Q.; Tian, C.M. Visual analysis of impact factors of forest pests and diseases. J. Vis. 2019, 22, 1257–1280. [Google Scholar] [CrossRef]
101. Verma, R.; Kushwaha, K.; Bijlwan, A.; Bisht, A.S. Enhancing urad bean (Vigna mungo L.) crop management with machine learning: Predictive analysis of pod rot severity and pod bug incidence patterns. Australas. Plant Pathol. 2024, 53, 273–283. [Google Scholar] [CrossRef]
102. Méndez-Vázquez, L.J.; Lasa-Covarrubias, R.; Cerdeira-Estrada, S.; Lira-Noriega, A. Using Simulated Pest Models and Biological Clustering Validation to Improve Zoning Methods in Site-Specific Pest Management. Appl. Sci. 2022, 12, 1900. [Google Scholar] [CrossRef]
103. Zhang, Z.P.; Jeske, D.R.; Cui, X.P.; Hoddle, M. Co-clustering Spatial Data Using a Generalized Linear Mixed Model With Application to the Integrated Pest Management. J. Agric. Biol. Environ. Stat. 2012, 17, 265–282. [Google Scholar] [CrossRef]
104. Wang, W.Q.; Xiao, G.L.; Yang, B.Y.; Ye, J.; Zhang, X.; Zheng, Y.Q.; Chen, B. Instar Determination for the Tomato Leafminer Tuta absoluta (Lepidoptera: Gelechiidae) Using the Density-Based OPTICS Clustering Algorithm. Environ. Entomol. 2022, 51, 940–947. [Google Scholar] [CrossRef] [PubMed]
105. Pratheepa, M.; Verghese, A.; Bheemanna, H. Weighted Association rule mining for the occurrence of the insect pest Helicoverpa armigera(Hubner) related with abiotic factors on cotton. In Proceedings of the 3rd International Conference on Computing for Sustainable Global Development (INDIACom), New Delhi, India, 16–18 March 2016; Hoda, M.N., Ed.; pp. 1884–1887. [Google Scholar]
106. Jin, X.; McCullough, P.E.; Liu, T.; Yang, D.; Zhu, W.; Chen, Y.; Yu, J. A smart sprayer for weed control in bermudagrass turf based on the herbicide weed control spectrum. Crop Prot. 2023, 170, 106270. [Google Scholar] [CrossRef]
107. Jin, X.; Liu, T.; Yang, Z.; Xie, J.; Bagavathiannan, M.; Hong, X.; Xu, Z.; Chen, X.; Yu, J.; Chen, Y. Precision weed control using a smart sprayer in dormant bermudagrass turf. Crop Prot. 2023, 172, 106302. [Google Scholar] [CrossRef]
108. Verma, T.; Dubey, S. Impact of Color Spaces and Feature Sets in Automated Plant Diseases Classifier: A Comprehensive Review Based on Rice Plant Images. Arch. Comput. Methods Eng. 2020, 27, 1611–1632. [Google Scholar] [CrossRef]
109. Wang, S.; Li, Y.; Yuan, J.; Song, L.; Liu, X.; Liu, X. Recognition of cotton growth period for precise spraying based on convolution neural network. Inf. Process. Agric. 2021, 8, 219–231. [Google Scholar] [CrossRef]
110. Tian, Y.N.; Wang, S.H.; Li, E.; Yang, G.D.; Liang, Z.Z.; Tan, M. MD-YOLO: Multi-scale Dense YOLO for small target pest detection. Comput. Electron. Agric. 2023, 213, 108233. [Google Scholar] [CrossRef]
111. Bondre, S.; Patil, D. Recent advances in agricultural disease image recognition technologies: A review. Concurr. Comput-Pract. Exp. 2023, 35, e7644. [Google Scholar] [CrossRef]
112. Zhong, Y.H.; Gao, J.Y.; Lei, Q.L.; Zhou, Y. A Vision-Based Counting and Recognition System for Flying Insects in Intelligent Agriculture. Sensors 2018, 18, 1489. [Google Scholar] [CrossRef] [PubMed]
113. Liu, S.Q.; Jin, Y.S.; Ruan, Z.W.; Ma, Z.; Gao, R.; Su, Z.B. Real-Time Detection of Seedling Maize Weeds in Sustainable Agriculture. Sustainability 2022, 14, 15088. [Google Scholar] [CrossRef]
114. Guo, B.L.; Ling, S.K.; Tan, H.Y.; Wang, S.; Wu, C.L.; Yang, D.S. Detection of the Grassland Weed Phlomoides umbrosa Using Multi-Source Imagery and an Improved YOLOv8 Network. Agronomy 2023, 13, 3001. [Google Scholar] [CrossRef]
115. Yu, Y.; Zhou, Q.; Wang, H.; Lv, K.; Zhang, L.J.; Li, J.; Li, D.M. LP-YOLO: A Lightweight Object Detection Network Regarding Insect Pests for Mobile Terminal Devices Based on Improved YOLOv8. Agriculture 2024, 14, 1420. [Google Scholar] [CrossRef]
116. Tang, Z.; Lu, J.J.; Chen, Z.Y.; Qi, F.; Zhang, L.Y. Improved Pest-YOLO: Real-time pest detection based on efficient channel attention mechanism and transformer encoder. Ecol. Inform. 2023, 78, 102340. [Google Scholar] [CrossRef]
117. Zhu, L.Q.; Li, X.M.; Sun, H.M.; Han, Y.P. Research on CBF-YOLO detection model for common soybean pests in complex environment. Comput. Electron. Agric. 2024, 216, 108515. [Google Scholar] [CrossRef]
118. Xin, D.Y.; Li, T.Q. Revolutionizing tomato disease detection in complex environments. Front. Plant Sci. 2024, 15, 1409544. [Google Scholar] [CrossRef]
119. Fang, J.X.; Jiang, H.T.; Zhang, S.Q.; Sun, L.; Hu, X.D.; Liu, J.; Gong, M.; Liu, H.X.; Fu, Y.Y. BAF-Net: Bidirectional attention fusion network via CNN and transformers for the pepper leaf segmentation. Front. Plant Sci. 2023, 14, 1123410. [Google Scholar] [CrossRef]
120. Zhang, W.D.; Li, Z.X.; Li, G.H.; Zhuang, P.X.; Hou, G.J.; Zhang, Q.; Li, C.Y. GACNet: Generate Adversarial-Driven Cross-Aware Network for Hyperspectral Wheat Variety Identification. IEEE Trans. Geosci. Remote Sens. 2024, 62, 5503314. [Google Scholar] [CrossRef]
121. Zhang, W.D.; Li, Z.X.; Sun, H.H.; Zhang, Q.; Zhuang, P.X.; Li, C.Y. SSTNet: Spatial, Spectral, and Texture Aware Attention Network Using Hyperspectral Image for Corn Variety Identification. IEEE Geosci. Remote Sens. Lett. 2022, 19, 5514205. [Google Scholar] [CrossRef]
122. Bala, M.; Bansal, S. Review-Unveiling the Power of Deep Learning in Plant Pathology: A Review on Leaf Disease Detection. ECS J. Solid State Sci. Technol. 2024, 13, 47003. [Google Scholar] [CrossRef]
123. Chore, A.; Thankachan, D. Nutrient Defect Detection In Plant Leaf Imaging Analysis Using Incremental Learning Approach with Multifrequency Visible Light Approach. J. Electr. Eng. Technol. 2023, 18, 1369–1387. [Google Scholar] [CrossRef]
124. Fu, M.X.; Lian, F.Y. Mildew Detection for Stored Wheat using Gas Chromatography-Ion Mobility Spectrometry and Broad Learning Network. Food Anal. Methods 2024, 17, 664–678. [Google Scholar] [CrossRef]
125. Saadati, M.; Toorchi, M. The study of plant protein accumulation in gut of insect using proteomics technique: Wheat–sunn pest interaction. J. Saudi Soc. Agric. Sci. 2017, 16, 205–209. [Google Scholar] [CrossRef]
126. Mendoza-Porras, O.; Nguyen, T.V.; Shah, R.M.; Thomas-Hall, P.; Bastin, L.; Deaker, D.J.; Motti, C.A.; Byrne, M.; Beale, D.J. Biochemical metabolomic profiling of the Crown-of-Thorns Starfish (Acanthaster): New insight into its biology for improved pest management. Sci. Total Environ. 2023, 861, 160525. [Google Scholar] [CrossRef]
127. Wu, Z.; Liu, Z.; Hu, Z.; Wang, T.; Teng, L.; Dai, T.; Liu, P.; Hao, J.; Liu, X. Utilizing metabolomic approach to study the mode of action of fungicides and corresponding resistance in plant pathogens. Adv. Agrochem 2024, 3, 197–205. [Google Scholar] [CrossRef]
128. Feng, Z.; Liu, N.; Tu, P.; Zou, Y.; Vosatka, M.; Zhao, Z.; Chen, J.; Song, H. Metabolomics Analysis of Bahia Grass (Paspalum notatum) Inoculated with Arbuscular Mycorrhizal Fungi exposed to soil Cd Stress. Environ. Exp. Bot. 2024, 226, 105867. [Google Scholar] [CrossRef]
129. Scheffler, B.E.; Michel, A.; Scheffler, J.A.; Duke, S.O. Molecular methods in weed science. Z. Pflanzenkrankh. Pflanzenschutz-J. Plant Dis. Prot. 2002, 28, 45–56. [Google Scholar]
130. Nayak, A.K.; Golive, P.; Sasmal, A.; Devanna, B.N.; Anilkumar, C.; Mukherjee, A.K.; Dash, S.S.; Das, M.S.; Subudhi, H. Exploring genetic divergence and marker-trait associations for leaffolder Cnaphalocrocis medinalis (Guenee) resistance in rice landraces. 3 Biotech 2024, 14, 90. [Google Scholar] [CrossRef] [PubMed]
131. Su, S.; Zuo, Y.Y.; Zhang, X.H.; Jian, C.Z.; Peng, X.; Piñero, J.C.; Chen, M.H. Efficient CRISPR/Cas9-mediated white gene editing in the global tortricid fruit pest Grapholita molesta. Entomol. Gen. 2022, 42, 987–996. [Google Scholar] [CrossRef]
132. Yan, R.; Lin, X. CRISPR/Cas9-Mediated Genome Editing System in Insect Genomics and Pest Management. In Methods in Molecular Biology; Humana: New York, NY, USA, 2022; Volume 2360, pp. 347–366. [Google Scholar]
133. Chen, X.; Palli, S.R. Genome editing in pests: Basic science to applications. J. Pest Sci. 2024, 97, 1135–1152. [Google Scholar] [CrossRef]
134. Lujan, P.A. Management of Phytophthora Blight on Chile Pepper with Pecan Byproduct Extracts. Ph.D. Thesis, New Mexico State University, Las Cruces, NM, USA, 2022. [Google Scholar]
135. Ito, A.; Kamiya, J.; Katsuno, N.; Yanase, E. Alterations in Nonvolatile Components of Tea (Camellia sinensis) Induced by Insect Feeding under Field Conditions. Horticulturae 2023, 9, 1078. [Google Scholar] [CrossRef]
136. Silva, F.L.; Quiroz-Carreño, S.; Ferreira, M.; Wei, Z.J.; Thakur, K.; Lv, X.G.; Avila-Acevedo, J.G.; Kubo, I.; Seigler, D.S.; Zengin, G.; et al. Exploring the potential of Fabiana imbricata Ruiz et Pav. (“Pichi”) against pest insects and pathogenic microorganisms for crop protection. S. Afr. J. Bot. 2022, 151, 114–127. [Google Scholar] [CrossRef]
137. Sampathkumar, A.; Aiyanathan, K.; Nakkeeran, S.; Manickam, S. Multifaceted Bacillus spp. for the management of cotton bacterial blight caused by Xanthomonas citri pv. malvacearum. Biol. Control 2023, 177, 105111. [Google Scholar] [CrossRef]
138. Zhang, N.; Tan, W.W.; Luo, G.M.; Pu, T.M.; Wang, J.Q.; Zhang, X.H.; Song, Y.H. Untargeted Metabolite Profiling of Camellia tetracocca’s Response to an Empoasca onukii Attack Using GC-MS and LC-MS. Agronomy 2023, 13, 791. [Google Scholar] [CrossRef]
139. Argotte-Ramos, R.; Cime-Castillo, J.; Vargas, V.; Lanz-Mendoza, H.; Rodriguez, M.H.; Rodriguez, M.C. Development of an Enzyme-Linked Immunosorbent Assay (ELISA) as a tool to detect NS1 of dengue virus serotype 2 in female Aedes aegypti eggs for the surveillance of dengue fever transmission. Heliyon 2024, 10, e29329. [Google Scholar] [CrossRef]
140. Soubry, I.; Doan, T.; Chu, T.; Guo, X. A Systematic Review on the Integration of Remote Sensing and GIS to Forest and Grassland Ecosystem Health Attributes, Indicators, and Measures. Remote Sens. 2021, 13, 3262. [Google Scholar] [CrossRef]
141. Thomas, C.S.; Skinner, P.W.; Fox, A.D.; Greer, C.A.; Gubler, W.D. Utilization of GIS/GPS-based information technology in commercial crop decision making in California, Washington, Oregon, Idaho, and Arizona. J. Nematol. 2002, 34, 200–206. [Google Scholar] [PubMed]
142. Di Guardo, A.; Capri, E.; Calliera, M.; Finizio, A. MIMERA: An online tool for the sustainable pesticide use at field scale. Sci. Total Environ. 2022, 846, 157285. [Google Scholar] [CrossRef] [PubMed]
143. Kumari, P.; Mishra, G.C.; Srivastava, C.P. Forecasting models for predicting pod damage of pigeonpea in Varanasi region. J. Agrometeorol. 2017, 19, 265–269. [Google Scholar] [CrossRef]
144. Damos, P. A stepwise algorithm to detect significant time lags in ecological time series in terms of autocorrelation functions and ARMA model optimisation of pest population seasonal outbreaks. Stoch. Environ. Res. Risk Assess. 2016, 30, 1961–1980. [Google Scholar] [CrossRef]
145. Chiu, L.; Rustia, D.J.A.; Lu, C.; Lin, T. Modelling and Forecasting of Greenhouse Whitefly Incidence Using Time-Series and ARIMAX Analysis. IFAC-PapersOnLine 2019, 52, 196–201. [Google Scholar] [CrossRef]
146. Zubair, M.; Ahmed, S.; Dey, A.; Das, A.; Hasan, M.M. An Intelligent Model to Suggest Top Productive Seasonal Crops Based on User Location in the Context of Bangladesh. In Smart Systems: Innovations in Computing (SSIC 2021), Proceedings of the 3rd International Conference on Smart Systems—Innovations in Computing (SSIC), Singapore, 22–23 January 2021; Somani, A.K., Mundra, A., Doss, R., Bhattacharya, S., Eds.; Springer: Singapore, 2022; Volume 235, pp. 289–300. [Google Scholar]
147. Wang, X.Y.; Kong, L.Y.; Zhi, P.F.; Chang, C. Update on Cuticular Wax Biosynthesis and Its Roles in Plant Disease Resistance. Int. J. Mol. Sci. 2020, 21, 5514. [Google Scholar] [CrossRef] [PubMed]
148. Balakrishnan, D.; Bateman, N.; Kariyat, R.R. Rice physical defenses and their role against insect herbivores. Planta 2024, 259, 110. [Google Scholar] [CrossRef] [PubMed]
149. Arya, G.C.; Sarkar, S.; Manasherova, E.; Aharoni, A.; Cohen, H. The Plant Cuticle: An Ancient Guardian Barrier Set Against Long-Standing Rivals. Front. Plant Sci. 2021, 12, 663165. [Google Scholar] [CrossRef]
150. Halpern, M.; Raats, D.; Lev-Yadun, S. Plant biological warfare: Thorns inject pathogenic bacteria into herbivores. Environ. Microbiol. 2007, 9, 584–592. [Google Scholar] [CrossRef] [PubMed]
151. Kavitha, R.S.; Balamohan, T.N.; Kavitha, M.; Selvi, B.S. Biochemical interactions of banana hybrids to root lesion nematodes (Pratylenchus coffeae). Plant Arch. 2008, 8, 105–110. [Google Scholar]
152. Shafiei, F.; Shahidi-Noghabi, S.; Sedaghati, E.; Smagghe, G. Arbuscular Mycorrhizal Fungi Inducing Tomato Plant Resistance and Its Role in Control of Bemisia tabaci Under Greenhouse Conditions. Neotrop. Entomol. 2024, 53, 424–438. [Google Scholar] [CrossRef]
153. Stenberg, J.A.; Lehrman, A.; Björkman, C. Plant defence: Feeding your bodyguards can be counter-productive. Basic Appl. Ecol. 2011, 12, 629–633. [Google Scholar] [CrossRef]
154. Van Oosten, V.R.; Bodenhausen, N.; Reymond, P.; Van Pelt, J.A.; Van Loon, L.C.; Dicke, M.; Pieterse, C. Differential effectiveness of microbially induced resistance against herbivorous insects in Arabidopsis. Mol. Plant-Microbe Interact. 2008, 21, 919–930. [Google Scholar] [CrossRef]
155. N’Guessan, L.; Chillet, M.; Chiroleu, F.; Soler, A. Ecologically Based Management of Pineapple Mealybug Wilt: Controlling Dysmicoccus brevipes Mealybug Populations with Salicylic Acid Analogs and Plant Extracts. Horticulturae 2024, 10, 227. [Google Scholar] [CrossRef]
156. Jeon, H.W.; Park, A.R.; Sung, M.; Kim, N.; Mannaa, M.; Han, G.; Kim, J.; Koo, Y.; Seo, Y.S.; Kim, J.C. Systemic Acquired Resistance-Mediated Control of Pine Wilt Disease by Foliar Application With Methyl Salicylate. Front. Plant Sci. 2022, 12, 812414. [Google Scholar] [CrossRef] [PubMed]
157. Bungala, L.; Park, C.; Dique, J.; Sathasivam, R.; Shin, S.Y.; Park, S.U. Ethylene: A Modulator of the Phytohormone-Mediated Insect Herbivory Network in Plants. Insects 2024, 15, 404. [Google Scholar] [CrossRef]
158. Li, A.M.; Wang, M.; Chen, Z.L.; Qin, C.X.; Liao, F.; Wu, Z.; He, W.Z.; Lakshmanan, P.; Pan, Y.Q.; Huang, D.L. Integrated Transcriptome and Metabolome Analysis to Identify Sugarcane Gene Defense against Fall Armyworm (Spodoptera frugiperda) Herbivory. Int. J. Mol. Sci. 2022, 23, 13712. [Google Scholar] [CrossRef] [PubMed]
159. Lu, J.; Liu, J.; Chen, L.; Sun, J.; Su, Q.; Li, S.; Yang, J. Zhang, W. Screening of Brown Planthopper Resistant miRNAs in Rice and Their Roles in Regulation of Brown Planthopper Fecundity. Rice Sci. 2022, 29, 559–568. [Google Scholar]
160. Lv, L.J.; Guo, X.R.; Zhao, A.J.; Liu, Y.P.; Li, H.; Chen, X.Y. Combined analysis of metabolome and transcriptome of wheat kernels reveals constitutive defense mechanism against maize weevils. Front. Plant Sci. 2023, 14, 1147145. [Google Scholar] [CrossRef]
161. Del Águila, I.M.; Cañadas, J.; Túnez, S. Decision making models embedded into a web-based tool for assessing pest infestation risk. Biosyst. Eng. 2015, 133, 102–115. [Google Scholar] [CrossRef]
162. Pan, F.; Gao, L.J.; Zhu, K.H.; Du, G.L.; Zhu, M.M.; Zhao, L.; Gao, Y.L.; Tu, X.B.; Zhang, Z.H. Regional selection of insecticides and fungal biopesticides to control aphids and thrips and improve the forage quality of alfalfa crops. J. Integr. Agric. 2023, 22, 185–194. [Google Scholar] [CrossRef]
163. Koppenhöfer, A.M.; Kostromytska, O.S.; Wu, S.H. Pyrethroid-Resistance Level Affects Performance of Larvicides and Adulticides From Different Insecticide Classes in Population of Listronotus maculicollis (Coleoptera: Curculionidae). J. Econ. Entomol. 2018, 111, 1851–1859. [Google Scholar] [CrossRef]
164. Kulye, M.; Mehlhorn, S.; Boaventura, D.; Godley, N. Venkatesh, SK.; Rudrappa, T.; Charan, T.; Rathi, D.; Nauen, R. Baseline Susceptibility of Spodoptera frugiperda Populations Collected in India towards Different Chemical Classes of Insecticides. Insects 2021, 12, 758. [Google Scholar] [CrossRef] [PubMed]
165. Stavrakaki, M.; Ilias, A.; Simoglou, K.B.; Mironidis, G.K.; Zimmer, C.T.; Souza, D.; Roditakis, E. Revision of Helicoverpa armigera insecticide resistance status in Greece. Crop Prot. 2024, 175, 106446. [Google Scholar] [CrossRef]
166. Muniz-Junior, G.; Roque, F.D.; Pires, A.P.; Guariento, R.D. Are lower pesticide doses better? An evolutionary perspective on integrated pest management. Ecol. Model. 2023, 482, 110408. [Google Scholar] [CrossRef]
167. Gentil, C.; Basset-Mens, C.; Manteaux, S.; Mottes, C.; Maillard, E.; Biard, Y.; Fantke, P. Coupling pesticide emission and toxicity characterization models for LCA: Application to open-field tomato production in Martinique. J. Clean. Prod. 2020, 277, 124099. [Google Scholar] [CrossRef]
168. Holbak, M.; Vuaille, J.; Diamantopoulos, E.; Styczen, M.E.; Petersen, C.T.; Strobel, B.W.; Abrahamsen, P. Application timing as a mitigation tool for pesticide leaching to drains in northwest Europe. J. Hydrol.-Reg. Stud. 2024, 53, 101734. [Google Scholar] [CrossRef]
169. Quan, X.H.; Guo, Q.L.; Ma, J.; Doluschitz, R. The economic effects of unmanned aerial vehicles in pesticide application: Evidence from Chinese grain farmers. Precis. Agric. 2023, 24, 1965–1981. [Google Scholar] [CrossRef]
170. Gafni, R.; Ziv, G.A.; Eizenberg, H.; Blank, L. A regional-scale study of the contribution of local, management and climate factors to the infestation of processing tomato fields with Amaranthus species. Eur. J. Agron. 2023, 143, 126722. [Google Scholar] [CrossRef]
171. Vuaille, J.; Holbak, M.; Perslev, M.; Diamantopoulos, E.; Jensen, S.M.; Styczen, M.E.; Petersen, C.T.; Strobel, B.W.; Abrahamsen, P. Can information on past and near-future weather and field conditions predict the safest pesticide application day? Comput. Electron. Agric. 2022, 203, 107454. [Google Scholar] [CrossRef]
172. Tudi, M.; Ruan, H.D.; Wang, L.; Lyu, J.; Sadler, R.; Connell, D.; Chu, C.; Phung, D.T. Agriculture Development, Pesticide Application and Its Impact on the Environment. Int. J. Environ. Res. Public Health 2021, 18, 1112. [Google Scholar] [CrossRef] [PubMed]
173. Rastgordani, F.; Oveisi, M.; Mashhadi, H.R.; Naeimi, M.H.; Hosseini, N.M.; Asadian, N.; Bakhshian, A.; Müller-Schärer, H. Climate change impact on herbicide efficacy: A model to predict herbicide dose in common bean under different moisture and temperature conditions. Crop Prot. 2023, 163, 106097. [Google Scholar] [CrossRef]
174. Yang, H.; Tan, Y.; Tang, S. From economic threshold to economic injury level: Modeling the residual effect and delayed response of pesticide application. Math. Biosci. 2024, 373, 109223. [Google Scholar] [CrossRef] [PubMed]
175. Yang, Y.Y.; Yang, M.; Zhao, T.; Pan, L.Y.; Jia, L.; Zheng, L.F. Residue and Risk Assessment of Fluopyram in Carrot Tissues. Molecules 2022, 27, 5544. [Google Scholar] [CrossRef]
176. Zheng, Q.; Wu, J.; Yan, W.J.; Zhu, S.Q.; Miao, X.R.; Wang, R.F.; Huang, S.Q.; Cheng, D.M.; Zhang, P.W.; Zhang, Z.X. Green synthesis of a chlorfenapyr chitosan nanopesticide for maize root application: Reducing environmental pollution and risks to nontarget organisms. Int. J. Biol. Macromol. 2023, 253, 126988. [Google Scholar] [CrossRef]
177. Wang, H.P.; Li, M.J.; Li, S.M.; Chen, X.Y.; Li, B.W.; Shao, H. Jin, F. Dissipation and potential risk of tristyrylphenol ethoxylate homologs in peanuts by spraying and root irrigation: A comparative assessment. J. Hazard. Mater. 2024, 472, 134486. [Google Scholar] [CrossRef] [PubMed]
178. Shang, Q.Q.; Lu, H.C.; Yang, M.D.; Wu, Y.J.; Chen, Q.; Yan, S. The Advancement and Prospects of the Tree Trunk Injection Technique in the Prevention and Control of Diseases and Pests. Agriculture 2024, 14, 107. [Google Scholar] [CrossRef]
179. Wheeler, C.E. Control of Pear Psylla in Pears and Black Stem Borer in Apples with Trunk Injection. Master’s Thesis, Michigan State University, East Lansing, MI, USA, 2020. [Google Scholar]
180. Archer, L.; Crane, J.H.; Albrecht, U. Trunk Injection as a Tool to Deliver Plant Protection Materials-An Overview of Basic Principles and Practical Considerations. Horticulturae 2022, 8, 552. [Google Scholar] [CrossRef]
181. Ottis, B.V.; Mattice, J.D.; Talbert, R.E. Determination of antagonism between cyhalofop-butyl and other rice (Oryza sativa) herbicides in barnyardgrass (Echinochloa crus-galli). J. Agric. Food Chem. 2005, 53, 4064–4068. [Google Scholar] [CrossRef]
182. Della Vechia, J.F.; Van Leeuwen, T.; Rossi, G.D.; Andrade, D.J. The role of detoxification enzymes in the susceptibility of Brevipalpus californicus exposed to acaricide and insecticide mixtures. Pestic. Biochem. Physiol. 2021, 175, 104855. [Google Scholar] [CrossRef] [PubMed]
183. Han, L.; Wang, S.B.; Wang, Z.C.; Jin, L.J.; He, X.K. Method of 3D Voxel Prescription Map Construction in Digital Orchard Management Based on LiDAR-RTK Boarded on a UGV. Drones 2023, 7, 242. [Google Scholar] [CrossRef]
184. Li, X.J.; Liang, Z.; Yang, G.; Lin, T.; Liu, B. Assessing the Severity of Verticillium Wilt in Cotton Fields and Constructing Pesticide Application Prescription Maps Using Unmanned Aerial Vehicle (UAV) Multispectral Images. Drones 2024, 8, 176. [Google Scholar] [CrossRef]
185. Wang, Z.K.; Wen, S.; Lan, Y.B.; Liu, Y.; Dong, Y.Y. Variable-rate spray system for unmanned aerial applications using lag compensation algorithm and pulse width modulation spray technology. J. Agric. Eng. 2024, 55. [Google Scholar] [CrossRef]
186. Yin, D.; Chen, S.; Pei, W.; Shen, B. Design of map-based indoor variable weed spraying system. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2011, 27, 131–135. [Google Scholar]
187. Román, C.; Arnó, J.; Planas, S. Map-based zonal dosage strategy to control yellow spider mite (Eotetranychus carpini) and leafhoppers (Empoasca vitis & Jacobiasca lybica) in vineyards. Crop Prot. 2021, 147, 105690. [Google Scholar]
188. Zhao, C.; Chen, T.; Chen, L.; Gao, Y. Decision-making support methods for precision pesticide application for preventing migratory pest disasters. Trans. Chin. Soc. Agric. Eng. 2008, 24 (Suppl. S2), 149–155. [Google Scholar]
189. Qiao, B.; He, X.; Wang, Z.; Han, L.; Liu, H.; Dong, X.; Liang, W. Development of variable-rate spraying system for high clearance wide boom sprayer based on LiDAR scanning. Trans. Chin. Soc. Agric. Eng. 2020, 89–95. [Google Scholar]
190. Rajak, P.; Roy, S.; Ganguly, A.; Mandi, M.; Dutta, A.; Das, K.; Nanda, S.; Ghanty, S. Biswas, G. Agricultural pesticides—Friends or foes to biosphere? J. Hazard. Mater. Adv. 2023, 10, 100264. [Google Scholar]
191. Xie, B.; Jin, Y.; Faheem, M.; Gao, W.; Liu, J.; Jiang, H.; Cai, L.; Li, Y. Research progress of autonomous navigation technology for multi-agricultural scenes. Comput. Electron. Agric. 2023, 211, 107963. [Google Scholar] [CrossRef]
192. Wu, C.; Li, D.; Zhang, X.; Pan, J.; Quan, L.; Yang, L.; Yang, W.; Ma, Q. Su, C.; Zhai, W. China’s agricultural machinery operation big data system. Comput. Electron. Agric. 2023, 205, 107594. [Google Scholar] [CrossRef]
193. Yao, Z.; Zhao, C.; Zhang, T. Agricultural machinery automatic navigation technology. iScience 2024, 27, 108714. [Google Scholar] [CrossRef] [PubMed]
194. Yang, L.; Xu, Y.; Li, Y.; Chang, M.; Chen, Z.; Lan, Y.; Wu, C. Real-Time field road freespace extraction for agricultural machinery autonomous driving based on LiDAR. Comput. Electron. Agric. 2023, 211, 108028. [Google Scholar] [CrossRef]
195. Huang, J.; Luo, Y.; Quan, Q.; Wang, B.; Xue, X.; Zhang, Y. An autonomous task assignment and decision-making method for coverage path planning of multiple pesticide spraying UAVs. Comput. Electron. Agric. 2023, 212, 108128. [Google Scholar] [CrossRef]
196. Xu, J.; Liu, C.; Shao, J.; Xue, Y.; Li, Y. Collaborative orchard pesticide spraying routing problem with multi-vehicles supported multi-UAVs. J. Clean. Prod. 2024, 458, 142429. [Google Scholar] [CrossRef]
197. Garg, S.; Rumjit, N.P.; Roy, S. Smart agriculture and nanotechnology: Technology, challenges, and new perspective. Adv. Agrochem 2024, 3, 115–125. [Google Scholar] [CrossRef]
198. Fang, S.P.; Ru, Y.; Hu, C.M.; Yang, F.B. Planning of takeoff/landing site location, dispatch route, and spraying route for a pesticide application helicopter. Eur. J. Agron. 2023, 146, 126814. [Google Scholar]
199. Wang, S.; Su, D.; Jiang, Y.; Tan, Y.; Qiao, Y.; Yang, S.; Feng, Y.; Hu, N. Fusing vegetation index and ridge segmentation for robust vision based autonomous navigation of agricultural robots in vegetable farms. Comput. Electron. Agric. 2023, 213, 108235. [Google Scholar] [CrossRef]
200. Luo, S.; Wen, S.; Zhang, L.; Lan, Y.; Chen, X. Extraction of crop canopy features and decision-making for variable spraying based on unmanned aerial vehicle LiDAR data. Comput. Electron. Agric. 2024, 224, 109197. [Google Scholar] [CrossRef]
201. Taseer, A.; Han, X. Advancements in variable rate spraying for precise spray requirements in precision agriculture using Unmanned aerial spraying Systems: A review. Comput. Electron. Agric. 2024, 219, 108841. [Google Scholar] [CrossRef]
202. Pergher, G. Field evaluation of a calibration method for air-assisted sprayers involving the use of a vertical patternator. Crop Prot. 2004, 23, 437–446. [Google Scholar] [CrossRef]
203. Khot, L.R.; Ehsani, R.; Albrigo, G.; Landers, A.J.; Larbi, P.A. Technical Note: Spray Pattern Investigation of an Axial-Fan Airblast Precision Sprayer Using a Modified Vertical Patternator. Appl. Eng. Agric. 2012, 28, 647–654. [Google Scholar] [CrossRef]
204. Fan, X.; Chai, X.; Zhou, J.; Sun, T. Deep learning based weed detection and target spraying robot system at seedling stage of cotton field. Comput. Electron. Agric. 2023, 214, 108317. [Google Scholar] [CrossRef]
205. Brown, D.L.; Giles, D.K.; Oliver, M.N.; Klassen, P. Targeted spray technology to reduce pesticide in runoff from dormant orchards. Crop Prot. 2008, 27, 545–552. [Google Scholar] [CrossRef]
206. Djouhri, M.; Loubet, B.; Bedos, C.; Dages, C.; Douzals, J.P.; Voltz, M. ADDI-Spraydrift: A comprehensive model of pesticide spray drift with an assessment in vineyards. Biosyst. Eng. 2023, 231, 57–77. [Google Scholar] [CrossRef]
207. Xue, S.; Han, J.; Xi, X.; Lan, Z.; Wen, R.; Ma, X. Coordination of distinctive pesticide adjuvants and atomization nozzles on droplet spectrum evolution for spatial drift reduction. Chin. J. Chem. Eng. 2024, 66, 250–262. [Google Scholar] [CrossRef]
208. Xue, S.; Xi, X.; Lan, Z.; Wen, R.; Ma, X. Longitudinal drift behaviors and spatial transport efficiency for spraying pesticide droplets. Int. J. Heat Mass Transf. 2021, 177, 121516. [Google Scholar] [CrossRef]
209. Palleja, T.; Tresanchez, M.; Llorens, J.; Saiz-Vela, A. Design and characterization of a real-time capacitive system to estimate pesticides spray deposition and drift. Comput. Electron. Agric. 2023, 207, 107720. [Google Scholar] [CrossRef]
210. Zanin AR, A.; Neves, D.C.; Teodoro, L.P.R.; da Silva, C.A.; da Silva, S.P.; Teodoro, P.E.; Baio, F.H.R. Reduction of pesticide application via real-time precision spraying. Sci. Rep. 2022, 12, 5638. [Google Scholar] [CrossRef] [PubMed]
211. Fessler, L.; Sun, X.; Wright, W.C.; Zhu, H.; Fulcher, A. Intelligent, Variable-rate Spray Technology Reduces Total Pesticide Output while Controlling Foliar Disease of Shumard Oak1. J. Environ. Hortic. 2023, 41, 109–120. [Google Scholar] [CrossRef]
212. Giles, D.K.; Klassen, P.; Niederholzer, F.; Downey, D. “Smart” sprayer technology provides environmental and economic benefits in California orchards. Calif. Agric. 2011, 65, 85–89. [Google Scholar] [CrossRef]
213. Ji, G.M.; Chen, H.Z.; Zhang, Y.P.; Xiang, J.; Wang, Y.L.; Wang, Z.G.; Zhu, D.F.; Zhang, Y.K. Leaf surface characteristics affect the deposition and distribution of droplets in rice (Oryza sativa L.). Sci. Rep. 2021, 11, 17846. [Google Scholar] [CrossRef] [PubMed]
214. Shan, C.F.; Wang, G.B.; Wang, H.H.; Xie, Y.J.; Wang, H.Z.; Wang, S.L.; Chen, S.D.; Lan, Y.B. Effects of droplet size and spray volume parameters on droplet deposition of wheat herbicide application by using UAV. Int. J. Agric. Biol. Eng. 2021, 14, 74–81. [Google Scholar] [CrossRef]
215. Zhou, Q.Q.; Xue, X.Y.; Qin, W.C.; Cai, C.; Zhou, L.F. Optimization and test for structural parameters of UAV spraying rotary cup atomizer. Int. J. Agric. Biol. Eng. 2017, 10, 78–86. [Google Scholar]
216. Prokop, M.; Veverka, K. Influence of droplet spectra on the efficiency of contact and systemic herbicides. Plant Soil Environ. 2003, 49, 75–80. [Google Scholar] [CrossRef]
217. Ugbeh-Johnson, J.; Carpenter, M.; Okeke, N.E.; Mai, N. Characterization of water droplets size distribution in aviation turbine fuel: Ultrasonic homogeniser vs high shear speed mixer. Fuel 2023, 332, 125674. [Google Scholar] [CrossRef]
218. Sun, H.J.; Luo, Y.K.; Ding, H.B.; Li, J.X.; Song, C.R.; Liu, X.X. Experimental investigation on atomization properties of impaction-pin nozzle using imaging method analysis. Exp. Therm. Fluid Sci. 2021, 122, 110322. [Google Scholar] [CrossRef]
219. Liu, J.P.; Liu, X.F.; Zhu, X.Y.; Yuan, S.Q. Droplet characterisation of a complete fluidic sprinkler with different nozzle dimensions. Biosyst. Eng. 2016, 148, 90–100. [Google Scholar] [CrossRef]
220. Wang, D.H.; Hui, S.E.; Zhuang, H.Y. Effect of Atomization Pressure on Flow Rate and Droplet Diameter of Small-Bore Atomizing Nozzle. In Proceedings of the 2015 International Conference on Applied Mechanics, Mechatronics and Intelligent Systems (Ammis2015); Qin, S., Li, X., Eds.; World Scientific Publishing: Singapore, 2016; pp. 33–37. [Google Scholar]
221. Qi, A.; Yeo, L.Y.; Friend, J.R. Interfacial destabilization and atomization driven by surface acoustic waves. Phys. Fluids 2008, 20, 74103. [Google Scholar] [CrossRef]
222. Topp, M.N. Ultrasonic atomization-a photographic study of the mechanism of disintegration. J. Aerosol Sci. 1973, 4, 17–25. [Google Scholar] [CrossRef]
223. Yuan, S.; Zhang, Y.; Gao, Y. Faraday wave instability characteristics of a single droplet in ultrasonic atomization and the sub-droplet generation mechanism. Exp. Therm. Fluid Sci. 2022, 134, 110618. [Google Scholar] [CrossRef]
224. Kudo, T.; Sekiguchi, K.; Sankoda, K.; Namiki, N.; Nii, S. Effect of ultrasonic frequency on size distributions of nanosized mist generated by ultrasonic atomization. Ultrason. Sonochem. 2017, 37, 16–22. [Google Scholar] [CrossRef]
225. Barreras, F.; Amaveda, H.; Lozano, A. Transient high-frequency ultrasonic water atomization. Exp. Fluids 2002, 33, 405–413. [Google Scholar] [CrossRef]
226. Ramisetty, K.A.; Pandit, A.B.; Gogate, P.R. Investigations into ultrasound induced atomization. Ultrason. Sonochem. 2013, 20, 254–264. [Google Scholar] [CrossRef] [PubMed]
227. Zhao, J.; Fu, L.X.; Ding, H.Y.; Bai, B.; Zhang, D.P.; Liu, J.; He, X. Numerical simulation of working process and gas-liquid interaction mechanism of air assisted nozzle. Int. J. Multiph. Flow 2023, 164, 104453. [Google Scholar] [CrossRef]
228. Du, B.X.; Zhao, Z.F. Numerical prediction of the spray from an air-assisted fuel injection system via Eulerian-Lagrangian approach. Energy Rep. 2021, 7, 6718–6732. [Google Scholar] [CrossRef]
229. Levitsky, I.; Tavor, D. Improved Atomization via a Mechanical Atomizer with Optimal Geometric Parameters and an Air-Assisted Component. Micromachines 2020, 11, 584. [Google Scholar] [CrossRef]
230. Avulapati, M.M.; Ravikrishna, R.V. Experimental Studies On Air-Assisted Atomization Of Jatropha Pure Plant Oil. At. Sprays 2015, 25, 553–569. [Google Scholar] [CrossRef]
231. Yang, Z.; Yu, J.X.; Duan, J.L.; Xu, X.; Huang, G.S. Optimization-Design and Atomization-Performance Study of Aerial Dual-Atomization Centrifugal Atomizer. Agriculture 2023, 13, 430. [Google Scholar] [CrossRef]
232. Liu, D.J.; Gong, Y.; Chen, X.; Zhang, X.; Wang, G. Design and experiment on atomizer parameter of impinging low-speed centrifugal atomization sprayer. Int. J. Agric. Biol. Eng. 2020, 13, 118–124. [Google Scholar] [CrossRef]
233. Ru, Y.; Liu, Y.Y.; Qu, R.J.; Patel, M.K. Experimental study on spraying performance of biological pesticides in aerial rotary cage nozzle. Int. J. Agric. Biol. Eng. 2020, 13, 1–6. [Google Scholar] [CrossRef]
234. Gong, Y.; Chen, X.B.; Liu, Y.; Pei, L.; Zhang, J.C. Design and Test of Controlled Droplet Sprayer for Facility Agriculture. In Recent Highlights in Advanced Materials, Proceeding of the 2nd International Congress on Advanced Materials (ICAM), Zhenjiang, China, 16–19 May 2013; Liu, S., Yuan, X.H., Eds.; Trans Tech Publications Ltd.: Zhenjiang, China, 2014; Volume 575–576, pp. 481–486. [Google Scholar]
235. Dunkley, J.J. 1—Advances in atomisation techniques for the formation of metal powders. In Advances in Powder Metallurgy; Woodhead Publishing: Sawston, UK, 2013; pp. 3–18. [Google Scholar]
Ye K, Hu G, Tong Z, Xu Y, Zheng J. Key Intelligent Pesticide Prescription Spraying Technologies for the Control of Pests, Diseases, and Weeds: A Review. Agriculture. 2025; 15(1):81. https://doi.org/10.3390/agriculture15010081
Перевод статьи «Key Intelligent Pesticide Prescription Spraying Technologies for the Control of Pests, Diseases, and Weeds: A Review» авторов Ye K, Hu G, Tong Z, Xu Y, Zheng J., оригинал доступен по ссылке. Лицензия: CC BY. Изменения: переведено на русский язык

















































































































Комментарии (0)