Как предсказать урожай риса на основе спутниковых снимков и анализа этапов роста
Прогнозирование урожайности риса для множества генотипов на основе временных рядов спутниковых снимков и динамического кластерного анализа процессов.
Аннотация
Своевременное, точное и эффективное прогнозирование урожайности риса имеет решающее значение для управления сельскохозяйственным производством и формирования продовольственной политики. Целью данной работы было создание стабильной и высокоточной модели для прогнозирования урожайности риса различных генотипов с учетом динамических процессов роста. Путем получения RGB и мультиспектральных данных рисового полога на всей стадии развития были получены данные по отражательной способности в нескольких спектральных диапазонах, вегетационным индексам, высоте и объему полога. Эти дистанционные характеристики были использованы для построения кривых, описывающих процесс роста риса. Для кластеризации различных характеристик на основе особенностей роста риса был применен метод k-shape, и впоследствии данные из разных кластеров были использованы для создания модели оценки урожайности. Результаты показали, что по сравнению с использованием только спектральных и геометрических факторов, точность модели оценки для множества генотипов риса, основанной на динамическом кластерном анализе процессов, была значительно выше. Наиболее точный расчет урожайности риса был достигнут на основе временных характеристик объема полога, со среднеквадратической ошибкой 315,39 кг/га и коэффициентом детерминации 0,82. Предложенный подход может быть полезен для задач точного земледелия и улучшения извлечения характеристик, связанных с процессом роста риса.
1. Введение
Рис служит основным продуктом питания почти для половины населения мира, особенно в Азии [1]. Это жизненно важный компонент повседневного рациона, богатый белками, углеводами, витаминами и минералами [2]. Рис является основной культурой во многих странах, и состояние его развития и производства напрямую влияет на продовольственную безопасность каждой нации [3]. Быстрое и точное получение данных об урожайности до сбора урожая крайне важно для точного предоставления сельскохозяйственного страхования и разумного управления земельными ресурсами, а также для помощи в разработке решений политики, связанной с национальной продовольственной безопасностью, макроконтроле рыночных цен на зерно и международной торговле зерном [4,5]. Таким образом, прогнозирование урожайности риса имеет решающее значение для обеспечения продовольственной безопасности, помощи в принятии сельскохозяйственных решений, развития науки и техники, адаптации к изменению климата, сохранения социальной стабильности и содействия международной торговле.
Оценка урожайности сельскохозяйственных культур является сложной, запаздывающей и неосуществимой в крупных масштабах из-за трудоемких, требующих много времени и специальных знаний традиционных методов, которые в основном включают полевые выборочные обследования, метеорологические прогнозы и агрономические прогнозы [6]. Более того, традиционные методы ручной оценки урожайности на месте неэффективны и сопряжены с риском повреждения растений, что делает их непригодными для оценки урожайности [7]. Дистанционное зондирование, как инструмент быстрого мониторинга, анализа и диагностики, который может надежно собирать данные изображений сельскохозяйственных культур на больших территориях, широко используется во многих аспектах точного земледелия [8]. С 1970-х годов, благодаря развитию технологий дистанционного зондирования, оптические спутниковые данные с определенными характеристиками, такие как пространственное, временное и спектральное разрешение, широко используются для прогнозирования урожайности сельскохозяйственных культур в крупных масштабах [9,10]. Однако своевременность сбора данных не может быть гарантирована из-за низкого и зависящего от погоды пространственного и временного разрешения спутниковых данных, что сильно влияет на прогнозирование региональной сельскохозяйственной продукции. В последние годы мониторинг роста сельскохозяйственных культур стал более эффективным благодаря технологии дистанционного зондирования с беспилотных летательных аппаратов (БПЛА), которая может гибко оснащаться различными датчиками и эффективно захватывать изображения с высоким пространственным и временным разрешением [11]. Дистанционное зондирование на основе БПЛА открывает новые перспективы для технологий дистанционного зондирования, обеспечивая больший охват, чем наземные методы измерений, лучшее пространственное разрешение, более частые возможности наблюдения и более низкую стоимость по сравнению со спутниковыми и аэрофотосъемками [12]. Таким образом, оценка урожайности риса в полевых условиях с использованием технологий дистанционного зондирования БПЛА имеет большой потенциал.
В большинстве современных исследований дистанционного зондирования сельскохозяйственных культур для оценки урожайности используются дифференцированные конфигурации полевых данных. Большинство полевых исследований планируются с использованием контроля за орошением, методами посадки и градиентом удобрений [13,14,15]. Однако сложно воспроизвести такой экспериментальный дизайн в реальных условиях полевого производства. Это затрудняет применение существующих моделей оценки в реальных полевых условиях. Полевые менеджеры адекватно удобряют почву перед посадкой. Сорта и сроки посадки могут различаться на полях риса, выращиваемых разными фермерами. Производители управляют своими площадями более сложными методами, особенно в условиях текущей ситуации с дроблением пахотных земель в Китае [16]. Из-за этого непостоянное орошение или использование удобрений встречается довольно редко. Следовательно, существует мало существующих исследований по дистанционному зондированию для оценки урожайности данных в условиях естественного роста, что затрудняет удовлетворение потребностей реального управления сельскохозяйственными угодьями.
Вегетационный индекс (VI), рассчитываемый на основе отражательной способности изображений с БПЛА, показал свою эффективность в качестве индикатора прогноза урожайности сельскохозяйственных культур [17]. Быстрое развитие БПЛА также повысило частоту сбора и пространственно-временное разрешение данных изображений сельскохозяйственных культур. Например, Чжоу и др. использовали БПЛА, оснащенный цифровой и мультиспектральной камерами, для захвата изображений риса на различных стадиях. Затем они использовали множественную линейную регрессию (MLR) для анализа взаимосвязи между различными VI и урожайностью риса. Согласно результатам, индекс видимой атмосферной устойчивости (VARI), рассчитанный с помощью MLR и цифровых изображений, показал наилучшие результаты на стадиях кущения и выхода в трубку, в то время как нормированный вегетационный индекс (NDVI), рассчитанный с помощью MLR и мультиспектральных изображений, показал наилучшие результаты на стадиях выхода в трубку и колошения [18]. Кроме того, для оценки урожайности сельскохозяйственных культур предлагались данные, включающие температуру полога, высоту и текстуру [13,15,19]. Однако для риса изменения полога очень сложны по мере смены репродуктивного цикла, и трудно предоставить обобщающие показатели для прогнозирования урожайности с использованием вышеупомянутых индикаторов. Вегетационные индексы плохо предсказывают урожайность на поздних стадиях развития сельскохозяйственных культур, поскольку считается, что урожайность является результатом нелинейного накопления продуктов фотосинтеза сельскохозяйственных культур, и традиционные модели линейной регрессии не могут адекватно уловить эту сложную нелинейную взаимосвязь. В результате при прогнозировании урожайности сельскохозяйственных культур исследователи выбирают нелинейные методы, такие как машинное обучение [19,20]. Машинное обучение может лучше обрабатывать нелинейные взаимосвязи между большими объемами данных. Однако оно слабо справляется со сложными нелинейными взаимосвязями и данными временных рядов и неэффективно при прогнозировании урожайности для нескольких сортов с большими вариациями морфологической структуры и стадии роста [21]. На производительность моделей машинного обучения влияют различные факторы, включая обучающие данные, входные переменные, тип культуры и стадию роста. Один из самых популярных методов оценки урожайности — линейная регрессия, которая часто хорошо работает благодаря своей высокой интерпретируемости [22].
В последние годы было показано, что фенология предоставляет критически важную информацию для прогнозирования урожайности сельскохозяйственных культур [23]. Исследования показали, что разделение временного окна по фенологическим стадиям позволяет более точно извлекать переменные окружающей среды для учета сложного взаимодействия между ростом сельскохозяйственных культур и внешними факторами [24]. Большинство текущих исследований по оценке урожайности сельскохозяйственных культур сосредоточены на использовании переменных одного периода или интеграции переменных нескольких периодов [4]. При использовании переменных одного периода часто анализируется корреляция между переменными и урожайностью от посева до созревания, и, в конечном итоге, переменные с высокой корреляцией отбираются для прямого прогнозирования урожайности. Когда используются переменные нескольких периодов, часто получают матрицу переменных из нескольких периодов в качестве входных данных для моделей машинного обучения или множественной регрессии для оценки урожайности. Однако информация о переменных сельскохозяйственных культур в разные периоды имеет различные параметры роста и не может быть непосредственно сравнена и интегрирована. Поэтому определение фенологического периода культуры необходимо для обеспечения точности мониторинга роста и прогнозирования урожайности. Пороговые методы, методы максимального наклона и аппроксимации кривых оптического дистанционного зондирования использовались для мониторинга фенологии сельскохозяйственных культур [25]. Эти подходы могут обнаруживать только стадию очевидного изменения зелености на основе точек перегиба и не могут отслеживать другие ключевые стадии, тесно связанные с сельскохозяйственными практиками. Более того, точный мониторинг фенологии в реальном времени может быть реализован на основе данных дистанционного зондирования и алгоритмов классификации. Однако это требует большого количества известных фенологических данных. Суть классификации различных фенологических периодов заключается в различении характеристик переменных на разных стадиях. Эту проблему можно решить, если найти подходящий метод разделения переменных для различения их различий. Алгоритм кластеризации k-shape — это типичный метод классификации, основанный на изменяющихся характеристиках временного ряда, который имеет преимущество в работе с сигналами из различных областей. Основная идея заключается в вычислении сходства между временными рядами на основе расстояния по форме для реализации кластеризации [26]. Переменные характеристик дистанционного зондирования представлены в виде временных рядов. Следовательно, существует потенциал для классификации характеристик дистанционного зондирования на основе временных рядов.
Для данного исследования были созданы два отдельных эксперимента, имитирующих выращивание риса в естественных условиях. Платформа дистанционного зондирования на базе БПЛА была оснащена как RGB, так и мультиспектральной камерами для получения высокочастотных наблюдений за рисом на протяжении всей стадии роста. Метод k-shape был использован для достижения высокоточной прогнозирования урожайности многогенотипного (многосортового) риса на основе кластеризации временных характеристик роста путем анализа вклада спектральной и структурной информации в оценку урожайности многогенотипного риса. Конкретными целями данного исследования были: (1) сравнить влияние геометрической и спектральной информации на оценку урожайности многогенотипного риса, (2) выбрать переменные, подходящие для характеристики особенностей процесса роста риса, и (3) прогнозировать урожайность многогенотипного риса путем кластеризации характеристик процесса роста.
2. Материалы и методы
2.1. Дизайн эксперимента
Данные, использованные в этом исследовании, были получены из трех независимых полевых экспериментов с использованием нескольких генотипов риса и воспроизводивших выращивание риса в условиях естественного роста, как показано на Рисунке 1. В Эксперименте 1 (2022 г., Эксп. 1) выращивались различные гибридные сорта риса на 289 делянках. Каждая делянка имела площадь один квадратный метр. В Эксперименте 2 (2019 г., Эксп. 2) было высажено 48 делянок, представляющих 48 различных сортов риса. Каждая полевая делянка имела общую площадь примерно 40 квадратных метров. За исключением различных генотипов риса, все процедуры управления полями были одинаковыми. Единая норма внесения азотных удобрений составляла 180 кг/га. Перед пересадкой 50% азотных удобрений вносилось в качестве основного удобрения, 25% — на стадии кущения и 25% — на стадии выхода в трубку. Фосфорные и калийные удобрения вносились в виде однократного основного удобрения в дозах 90 кг/га и 180 кг/га соответственно. В Эксперименте 3 (2022 г., Эксп. 3) были установлены три уровня градиента азота: N1/4, N1 и N2, что соответствовало внесению азота в количестве 36,3, 144 и 288 кг/га. Одновременно были установлены три повторности, и три сорта были рандомизированы. Всего было 27 делянок площадью около 15 м² каждая. Практики управления оставались такими же, как в Экспериментах 1 и 2, за исключением различий в сортах и уровнях внесения азота. Данное исследование проводилось в масштабе делянки. Каждая делянка была засажена отдельным сортом риса.
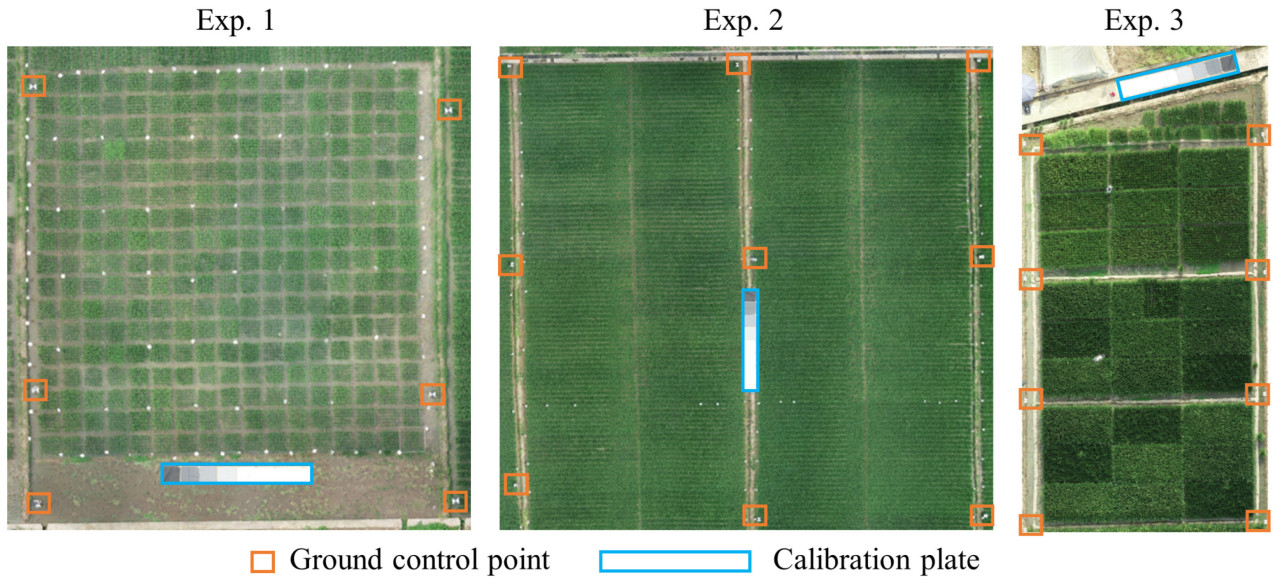
Рисунок 1. Схема эксперимента и расположение делянок.
2.2. Сбор и обработка данных
2.2.1. RGB-изображения с БПЛА
RGB-изображения рисового полога получались с помощью квадрокоптера Phantom 4 Pro, произведенного компанией DJI Innovation (SZ DJI Technology Co., Ltd., Шэньчжэнь, Китай). Высота БПЛА была установлена на 30 м, а перекрытие составляло 90% по курсу и 70% в боковом направлении. Средняя скорость полета БПЛА была установлена на 5 м/с. Время сбора данных на единицу площади (1 м²) рассчитывалось примерно как 0,6 с на основе экспериментальной площади. Стабилизатор БПЛА обеспечивал постоянное вертикальное положение камеры вниз во время захвата изображения. Камера имеет поле зрения 84°, размер изображения 5472 × 3648 пикселей и разрешение на местности около 1 см/пиксель. Размер диафрагмы и чувствительность ISO устанавливались перед аэрофотосъемкой в соответствии с фактическими условиями освещения в поле, и параметры камеры оставались неизменными на протяжении всего процесса захвата изображений.
После получения RGB-изображений экспериментальной области для склейки изображений и 3D-реконструкции использовалось программное обеспечение Agisoft Photoscan Professional (версия 1.4.5, Agisoft LLC, Санкт-Петербург, Россия) для генерации плотного 3D-облака точек, цифровой модели рельефа (ЦМР), цифровой модели поверхности (ЦМП) и ортомозаичных продуктов экспериментальной области на основе координат точек наземного контроля. Программное обеспечение Photoscan основано на алгоритмах Structure from Motion (SfM) и Multi-View Stereo (MVS) для обработки изображений. Данные RGB собирались в течение 10 периодов (обозначенных как S1–S10), включая стадии кущения, выхода в трубку, колошения и созревания риса, с интервалом 5–10 дней между каждым сбором.
2.2.2. Мультиспектральные изображения с БПЛА
Для сбора мультиспектральных данных использовался БПЛА S1000 (S1000, SZ DJI Technology Co., Ltd., Шэньчжэнь, Китай), оснащенный мультиспектральной камерой серии MCA (Tetracam, Inc., Чатсворт, Калифорния, США). Для миссии БПЛА выбиралась ясная, безоблачная и безветренная погода. Временной промежуток для сбора данных был постоянным с 10:00 до 14:00 по местному времени. Мультиспектральная камера, использованная в данном исследовании, — 12-канальная MCA (центральные длины волн: 490, 520, 550, 570, 670, 680, 700, 720, 800, 850, 900 и 950 нм). Время захвата RGB и мультиспектральных изображений было идентичным.
Обработка мультиспектральных изображений с БПЛА включает три этапа: геометрическая обработка, радиометрическая обработка и получение спектральной информации. Геометрическая обработка мультиспектральных изображений, полученных с помощью камеры MCA, включает калибровку засветки, регистрацию волновых диапазонов и коррекцию дисторсии, что достигается с помощью специального инструмента программирования для изображений MCA — PixelWrech2 (Tetracam, Inc., Чатсворт, Калифорния, США). Радиометрическая обработка состоит в основном из радиометрической калибровки. В данной работе для радиометрической калибровки использовались восемь калибраторов с известной отражательной способностью (3%, 6%, 12%, 24%, 36%, 48%, 56% и 80%), как показано на Рисунке 1. Метод радиометрической калибровки был основан на методе PEL [23]. Получение спектральной информации включает выделение области интереса (ROI) и извлечение отражательной способности.
2.2.3. Урожайность риса
После созревания риса всех генотипов урожайность риса измерялась на каждой делянке путем ручного отбора проб. После ручной уборки, обмолота, сушки, определения влажности и взвешивания измеренная урожайность риса рассчитывалась на основе количества взятых проб, веса проб, плотности посадки и влажности.
2.3. Построение вегетационных индексов
Вегетационные индексы были предложены для отражения динамических изменений в полном цикле роста растительности путем комбинации различных диапазонов отражательной способности. Они связаны с пигментацией листьев, фотосинтезом и питательным статусом растения и полезны для мониторинга роста риса. В этом исследовании были выбраны шесть вегетационных индексов, которые доказали свою эффективность в мониторинге роста растительности и прогнозировании урожайности, как показано в Таблице 1.
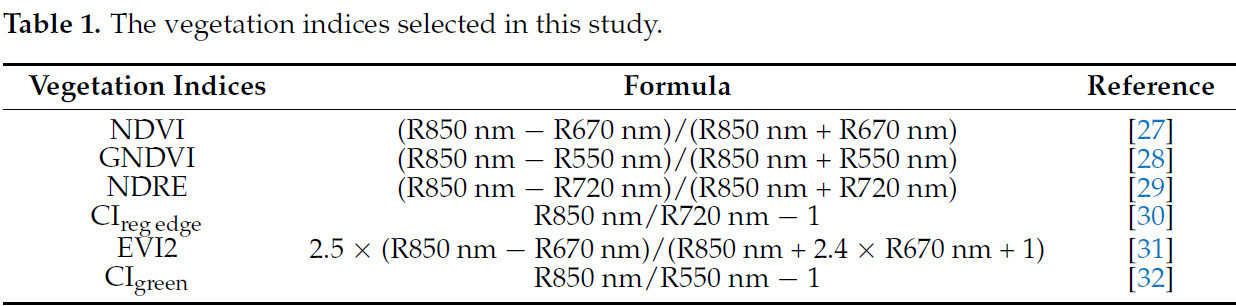
Таблица 1. Вегетационные индексы, выбранные в данном исследовании.
2.4. Извлечение высоты и объема полога риса
Для получения точной высоты полога (CH) и уменьшения влияния неровности грунта, цифровая модель рельефа (ЦМР) базовой поверхности получалась до пересадки риса в поле. После пересадки рассады, продукт цифровой модели поверхности (ЦМП), сгенерированный из каждой аэрофотосъемки, вычитается из ЦМР базовой поверхности, что дает модель высоты полога риса (CHM). На изображении CHM область рисового полога выбиралась путем очерчивания ROI, и среднее значение CH всех пикселей в пределах каждой ROI вычислялось как высота полога делянки. Процесс получения высоты полога риса показан на Рисунке 2.
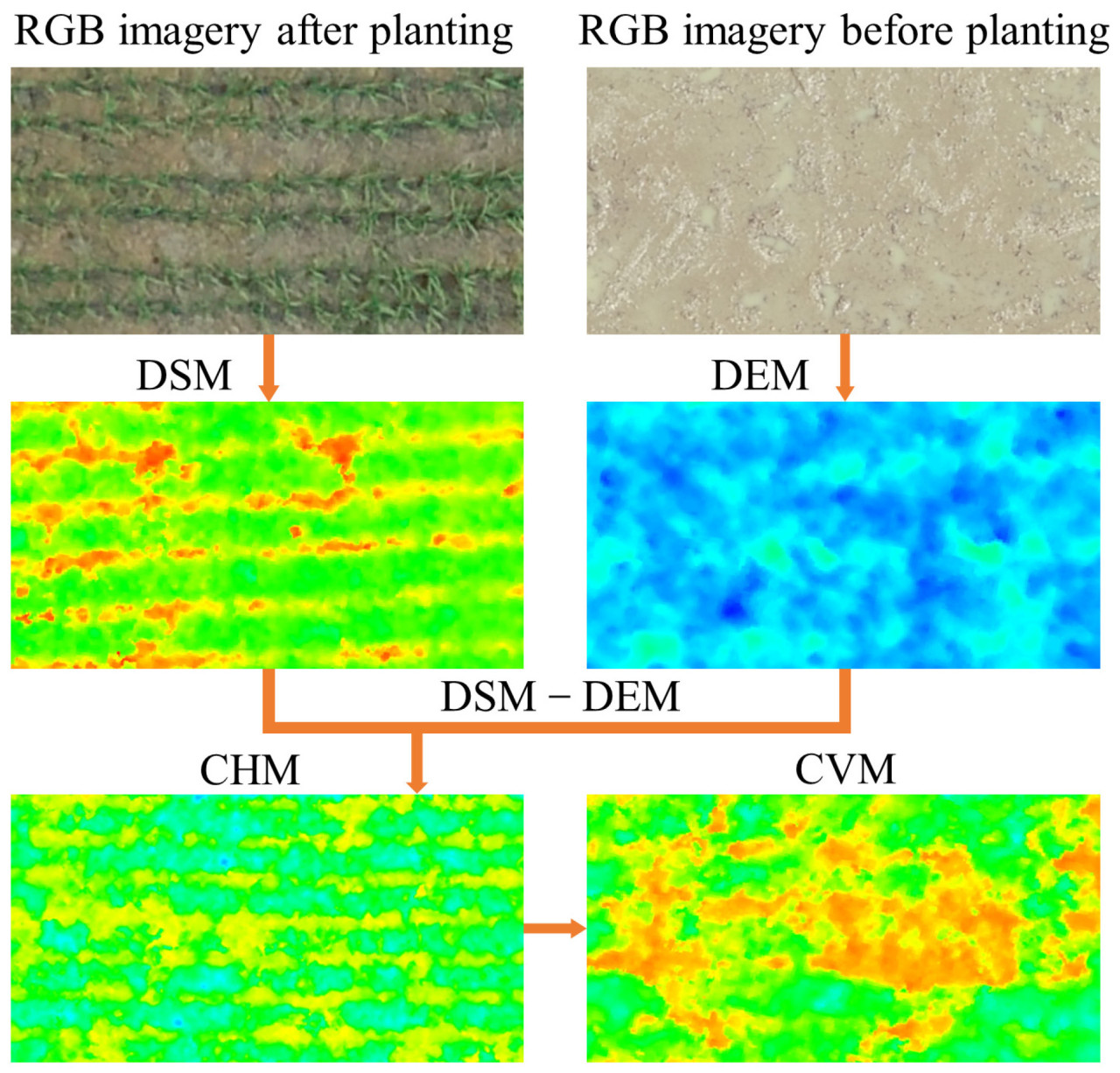
Рисунок 2. Процесс извлечения высоты и объема полога.
После получения CHM полога, модель объема полога (CVM) может быть получена путем объединения информации о размере пикселя на местности (GSD) для каждого пикселя. Аналогично CH, объем полога (CV) для каждой делянки можно рассчитать с помощью инструмента ROI. Формула для CV показана в Уравнении (1).

2.5. Метод кластеризации K-Shape
Точный, масштабируемый и независимый от предметной области метод кластеризации временных рядов, использованный в данном исследовании, — это алгоритм k-shape [33]. Программа может вычислять расстояния по форме и имеет меру расстояния, не зависящую от сдвига и масштабирования. Итеративный механизм улучшения, лежащий в основе алгоритма, создает однородные и лучше разделенные кластеры. Для обновления назначений кластеров временных рядов на каждой итерации предоставляется метод, который алгоритм использует для вычисления центров кластеров, основанный на характеристиках стандартной меры взаимной корреляции [26]. Конкретные шаги следующие: (1) Вычисление функции взаимной корреляции. Функция взаимной корреляции отражает степень совпадения двух последовательностей в различных относительных позициях. (2) Нормализация функции корреляции. (3) Расчет расстояния на основе формы (SBD). Чем больше функция корреляции, тем меньше SBD. (4) Вычисление центра масс класса на основе SBD. (5) Реализация кластеризации k-shape. Изначально последовательности случайным образом назначаются кластерам, случайным образом выбираются k последовательностей и вычисляется центр масс каждого кластера. Впоследствии SBD каждой последовательности с центром масс существующих кластеров вычисляется заново, и когда SBD минимален, она классифицируется в кластер, а центр масс каждого кластера обновляется динамически. Наконец, итерации выполняются до тех пор, пока изменение центра масс каждого кластера не станет меньше порога или не будет достигнуто указанное количество итераций.
2.6. Оценка модели и технологическая схема
В данном исследовании для статистики точности использовался метод перекрестной проверки с десятью подвыборками (ten-fold cross-validation), процессы калибровки и проверки модели показаны на Рисунке 3. Перекрестная проверка с десятью подвыборками — широко используемый метод оценки модели. Он делит набор данных на десять равных частей, и на каждой итерации девять из них берутся в качестве обучающей выборки, а оставшаяся одна — в качестве тестовой. Это выполняется циклически, пока каждая копия данных не будет использована в качестве тестовой выборки. В конечном итоге результаты тестирования десяти итераций усредняются для получения оценки производительности модели. Этот подход полностью использует данные, уменьшает дисперсию в оценке модели и повышает стабильность и надежность результатов оценки. В Эксп. 1 использовался метод перекрестной проверки с десятью подвыборками. Данные Эксп. 2 и Эксп. 3 использовались в качестве независимых данных проверки для измерения способности модели к переносу. Для оценки моделей прогнозирования урожайности риса были выбраны коэффициент детерминации (R²) и среднеквадратическая ошибка (RMSE). Технологическая схема прогнозирования урожайности риса в данном исследовании показана на Рисунке 4.
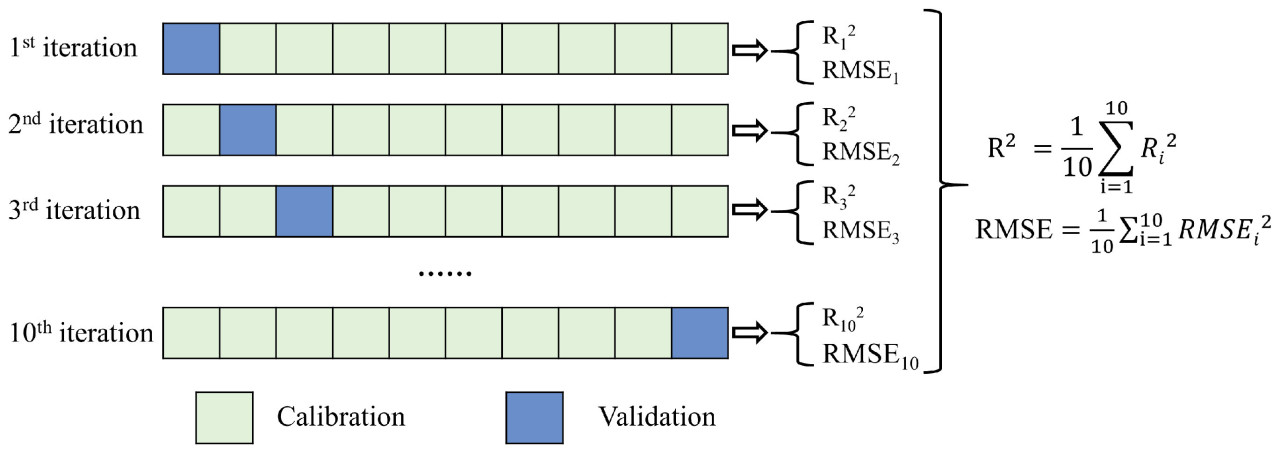
Рисунок 3. Схема перекрестной проверки с десятью подвыборками.
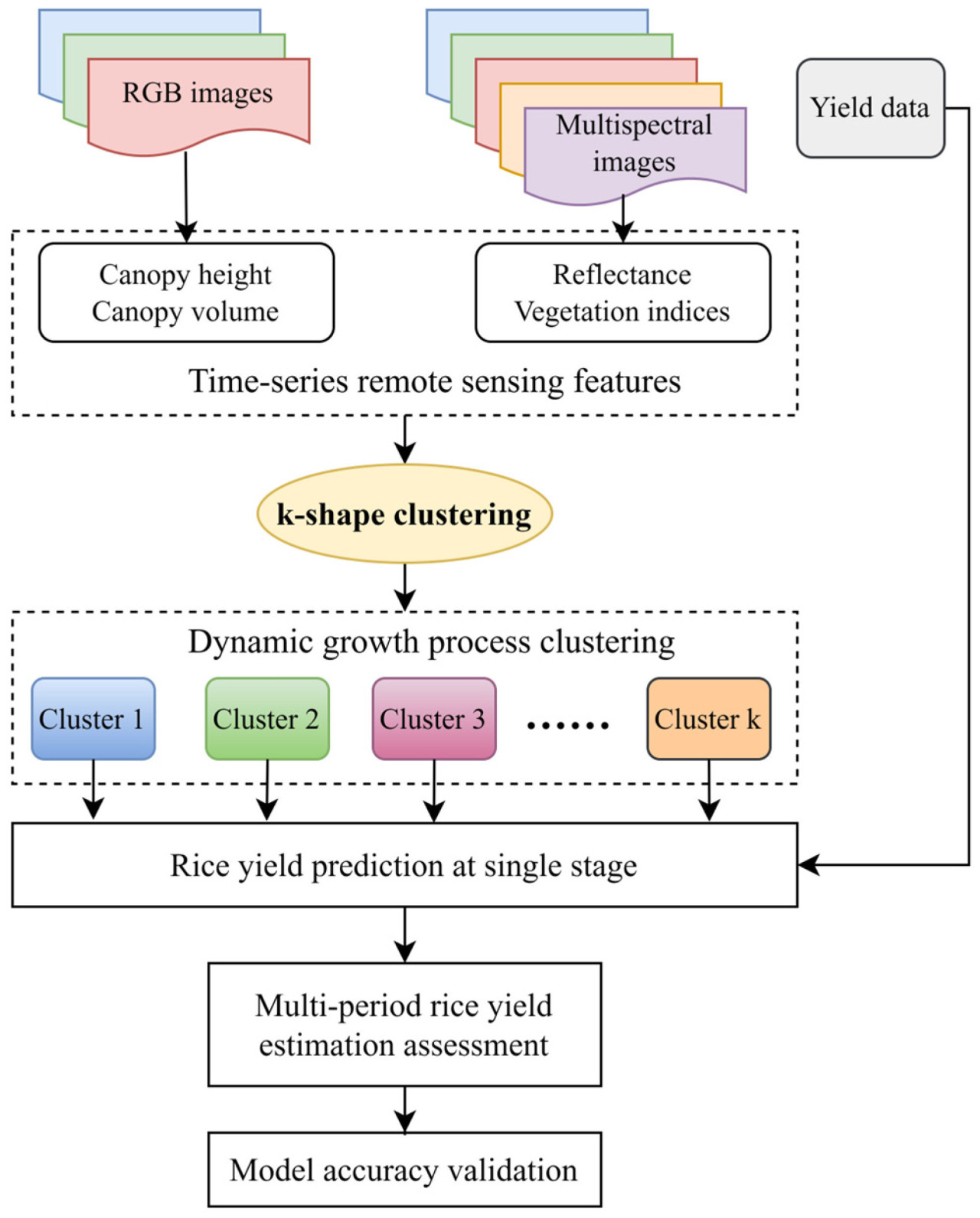
Рисунок 4. Технологическая схема оценки урожайности риса.
3. Результаты
3.1. Результаты извлечения высоты полога
Из-за трудоемкости и больших временных затрат при измерении высоты полога риса ручными методами, своевременное получение реальных данных для большого количества образцов не могло быть обеспечено. Взяв в качестве примера Эксп. 1, фактические высоты полога различных частей образцов измерялись в десять периодов, и в конечном итоге было получено 765 выборочных данных. Технология дистанционного зондирования с БПЛА использовалась для получения высоты полога риса соответствующих фактически измеренных делянок, и результаты сравнения показаны на Рисунке 5. Видно, что высота полога риса, полученная с помощью технологии дистанционного зондирования с БПЛА, имеет очень высокую точность, с общей RMSE 0,04 м. Все выборочные точки распределены вблизи линии 1:1. Следовательно, высота полога риса (CH), полученная методами дистанционного зондирования, может заменить измеренные данные. Полученная с БПЛА CH использовалась для всех расчетов в последующем процессе моделирования.
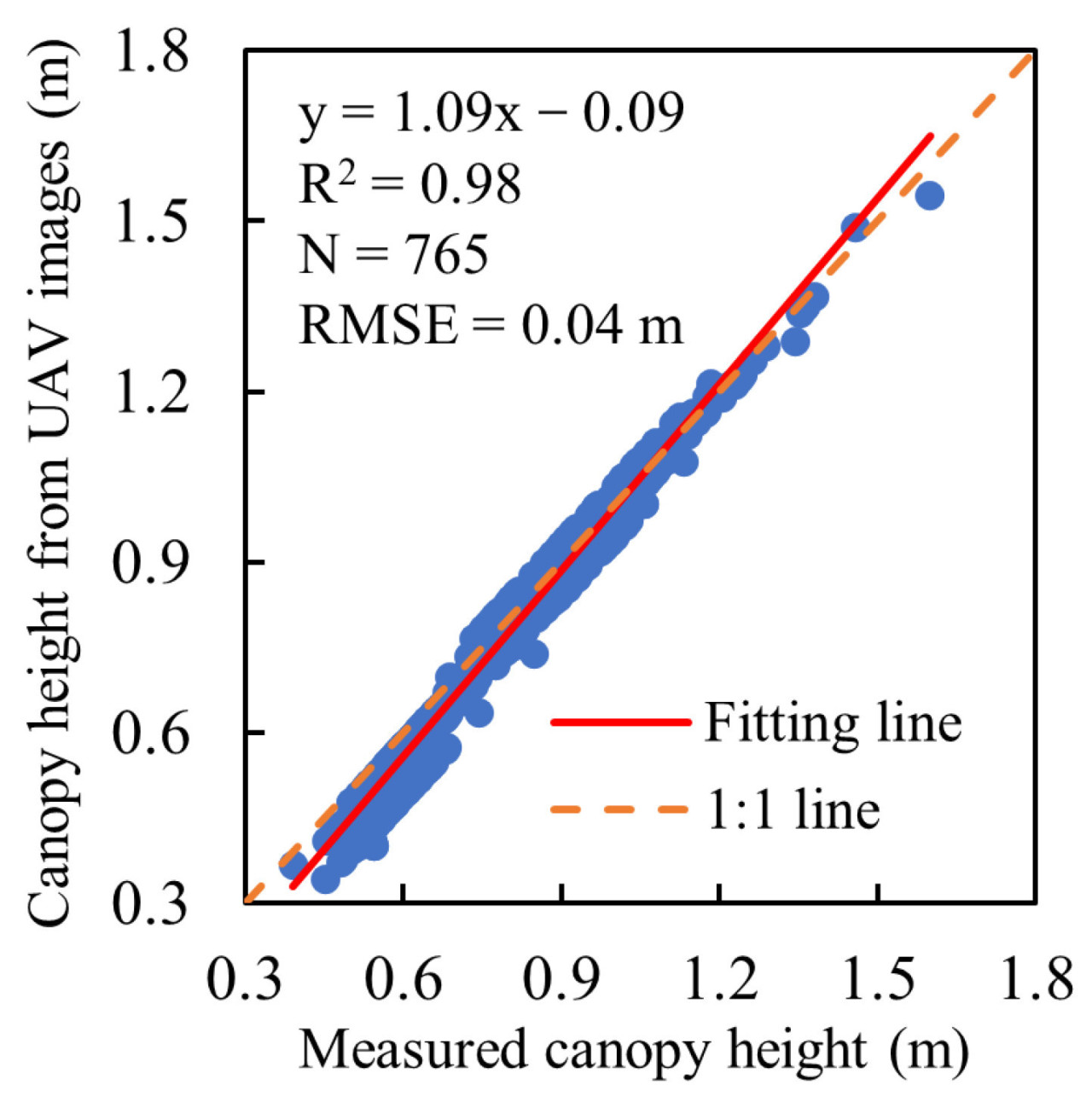
Рисунок 5. Сравнение высот полога риса, полученных с RGB-изображений БПЛА, с измеренными значениями.
3.2. Прогнозирование урожайности риса на основе VI, CH и CV
Перед прогнозированием урожайности риса необходимо проанализировать изменения каждой переменной-предиктора с течением времени. В качестве примера были взяты отражательная способность в диапазоне 720 нм, NDRE, CIgreen и CH для некоторых делянок и проанализированы, результаты показаны на Рисунке 6. Видно, что изменения отражательной способности в красном крае спектра со временем показывают общую тенденцию к постепенному увеличению. Однако наблюдается очевидная волатильность. NDRE показал общую тенденцию сначала к увеличению, затем к относительной стабильности и, наконец, к уменьшению с течением времени. По сравнению с отражательной способностью, волатильность ослаблена. CIgreen в целом показывает согласованную тенденцию с NDRE, но наблюдается ложная волатильность. По сравнению с отражательной способностью в красном крае, NDRE и CIgreen, CH демонстрирует наименьшую волатильность, показывая общую тенденцию к увеличению, а затем стабилизации. Стоит отметить, что существует очевидная общность в выбранных показателях, т.е. есть несколько образцов с согласованной тенденцией волатильности, но сильно отличающейся тенденцией от других. В случае NDRE, например, ясно, что некоторые образцы показывают кривую резкого роста, за которым следует стабилизация и, наконец, резкое снижение. Существует другой класс образцов, который показывает стабильную и постоянную кривую, за которой следует постепенное увеличение и, наконец, снижение волатильности. Более того, на средней стадии роста показатели демонстрируют более сложные модели изменений, особенно отражательная способность в диапазоне красного края и CIgreen. Общую модель изменения этих переменных можно разделить на более похожие комбинации образцов.
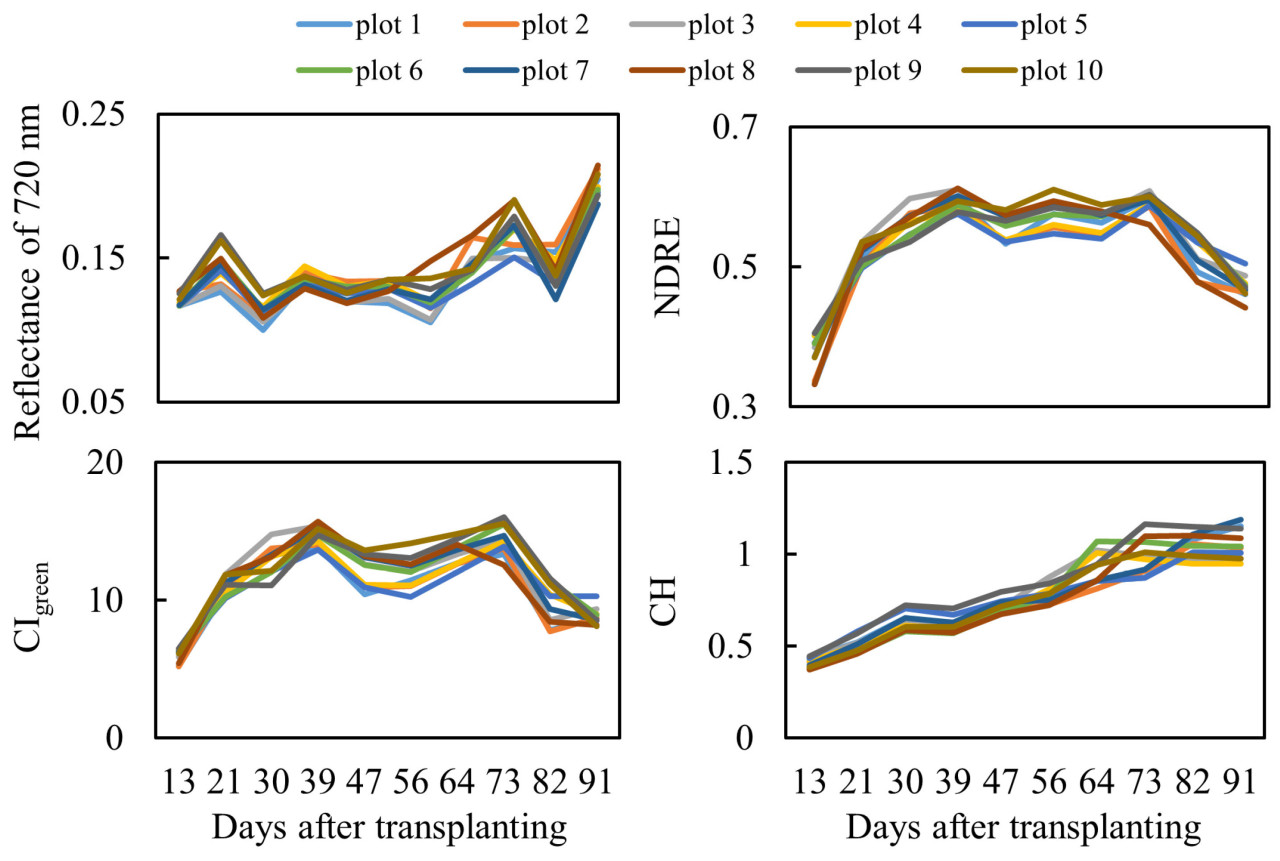
Рисунок 6. Кривые временных рядов отражательной способности полога, VI и CH на выбранных делянках.
Была проанализирована корреляция шести вегетационных индексов, CH и CV, построенных в данном исследовании, с конечной урожайностью на разных стадиях, и результаты показаны на Рисунке 7. На тепловой карте корреляции более темные цвета указывают на более высокие коэффициенты корреляции Пирсона. указывает на значительную корреляцию на уровне достоверности 0,05. С точки зрения отдельных периодов, почти все переменные дистанционного зондирования показали незначительную корреляцию с урожайностью, за исключением EVI2 в периоде S3. В случаях, когда переменные нескольких периодов совместно предсказывали урожайность риса, для объединения переменных с разных стадий использовались методы множественной линейной регрессии. Видно, что все переменные, за исключением NDVI, GNDVI и CIgreen, были значимо коррелированы с урожайностью риса. Среди них NDRE, CH и CV показали самые сильные корреляции. Это указывает на то, что многопериодные данные дистанционного зондирования имеют потенциал для повышения точности прогнозирования урожайности риса. Однако коэффициенты корреляции все еще ниже 0,6, и необходимо дальнейшее повышение точности.
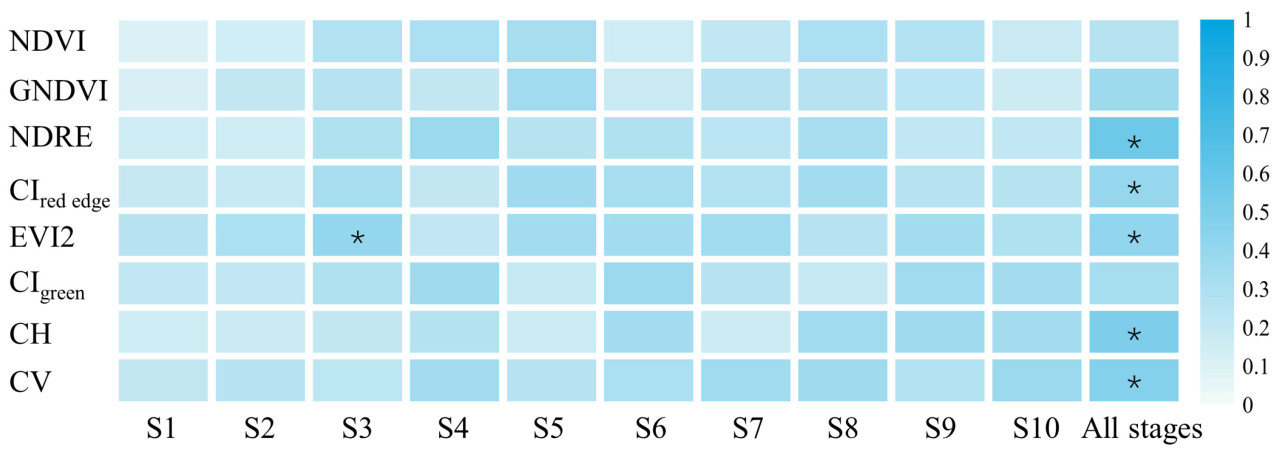
Рисунок 7. Корреляция переменных дистанционного зондирования с урожайностью риса в разные периоды ( указывает на значительную корреляцию на уровне достоверности 0,05).
Модели прогнозирования урожайности риса с использованием переменных NDRE, CH и CV и множественной линейной регрессии показаны на Рисунке 8. Можно наблюдать, что точные результаты прогнозирования урожайности риса не могут быть получены путем прямого использования переменных дистанционного зондирования за несколько периодов. R² моделей все ниже 0,4, а RMSE все более 1500 кг/га. Как видно из теста на нормальность измеренных данных, данные об урожайности 289 делянок соответствуют стандартному нормальному распределению. Результаты прогноза на основе NDRE, CH и CV показывают, что в большинстве делянок наблюдается завышение урожайности риса, и прогнозируемые значения урожайности подавляющего большинства делянок превышают 9000 кг/га. С точки зрения распределения урожайности, результаты прогноза урожайности на основе NDRE и CH показывают, что существует большое количество явлений кластеризации выборочных точек, которые не могут соответствовать стандартному нормальному распределению. В модели на основе CV это явление исправлено. Это показывает потенциал CV для оценки урожайности риса с высокой точностью.
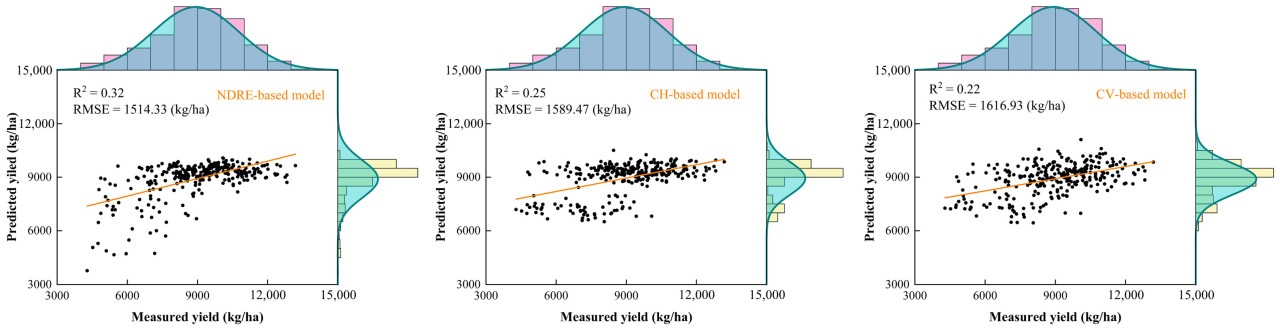
Рисунок 8. Сравнение результатов оценки урожайности риса на основе многопериодных NDRE, CH и CV.
3.3. Прогнозирование урожайности риса на основе динамической кластеризации процессов
3.3.1. Кластеризация на основе кривых отражательной способности временных рядов
Для уменьшения взаимного влияния между несколькими группами образцов, образцы со схожими тенденциями кривых были сгруппированы. Метод k-shape использовался для кластеризации кривых отражательной способности различных диапазонов на основе метода расчета центра масс на основе SBD. На Рисунке 9 отображены результаты использования соответствующих переменных из нескольких периодов для прогнозирования урожайности в каждой группе образцов. Прогнозирование урожайности риса не улучшается значительно и последовательно при кластеризации кривых отражательной способности в любом из диапазонов, кроме диапазонов красного края (700 и 720 нм). Оптимальная точность прогнозирования урожайности риса с использованием этого показателя составляет около 0,5 для R² и около 1200 кг/га для RMSE. Точность оценки урожайности риса колеблется нерегулярно с увеличением количества категорий кластеризации. С точки зрения локальных эффектов, точность прогнозирования урожайности риса может показать некоторое улучшение после реализации кластеризации образцов. Например, точность R² увеличивается примерно на 0,2, а RMSE уменьшается примерно на 600 кг/га после использования кривой отражательной способности в диапазоне 490 нм для реализации разделения образцов на 5 и 8 категорий. После разделения образцов на две и четыре категории с использованием кривой отражательной способности в диапазоне 800 нм RMSE уменьшается примерно на 800 кг/га, а точность R² увеличивается примерно на 0,2. Точность R² увеличивается примерно на 0,3, а RMSE уменьшается более чем на 600 кг/га после реализации разделения образцов на 4 и 7 классов с использованием кривой отражательной способности в диапазоне 550 нм. Само собой разумеется, что неправильная кластеризация снизит точность.
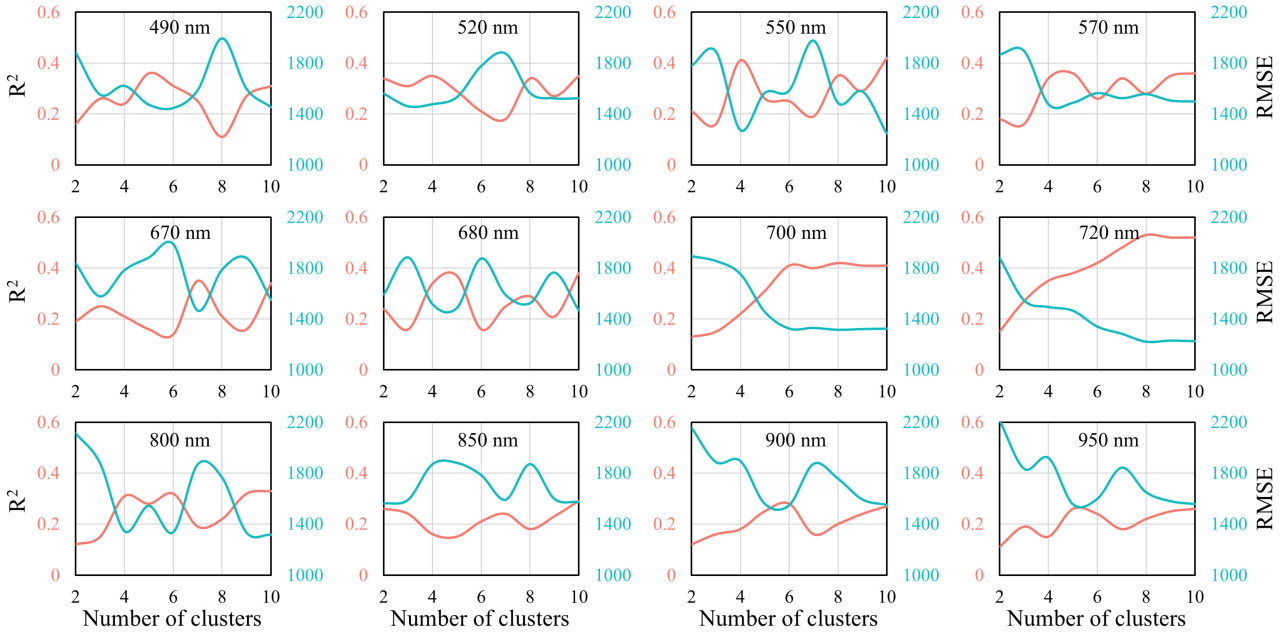
Рисунок 9. Тенденции результатов оценки урожайности риса за несколько периодов на основе кластеризации характеристик временных рядов кривых отражательной способности в различных диапазонах.
Было обнаружено, что точность прогнозирования урожайности риса значительно возрастала и стабилизировалась после кластеризации образцов с использованием кривых отражательной способности в диапазоне красного края. Кластеризация на шесть классов образцов наиболее улучшает точность модели при использовании диапазона 700 нм. По сравнению с кластеризацией только на два класса образцов, R² увеличивается примерно на 0,3, а RMSE уменьшается примерно на 700 кг/га. Точность модели в основном остается неизменной по мере увеличения количества классов кластеризации. Точность модели увеличилась больше всего при использовании диапазона 720 нм и кластеризации на восемь классов образцов. При кластеризации только двух классов образцов RMSE уменьшается примерно на 800 кг/га, а R² улучшается примерно на 0,4. Точность модели перестает увеличиваться по мере продолжения роста категорий кластеризации. Согласно вышеупомянутым результатам, рост риса может быть описан с помощью профилей отражательной способности в диапазоне красного края.
3.3.2. Кластеризация на основе кривых вегетационных индексов временных рядов
Аналогично кластеризации временных рядов отражательной способности, для различных вегетационных индексов с помощью алгоритма k-shape были сгруппированы разные категории. В каждой категории образцов урожайность риса предсказывалась с использованием соответствующих переменных в несколько периодов, и результаты показаны на Рисунке 10. Можно обнаружить, что с увеличением категорий кластеризации точность оценки урожайности риса для различных вегетационных индексов показывает очевидное и стабильное улучшение. За исключением очевидной закономерности улучшения точности, по сравнению с результатами кластеризации с использованием характеристик спектральных кривых, точность прогнозирования урожайности риса с использованием кластеризации характеристик вегетационных индексов существенно улучшается, с наивысшей точностью R², близкой к 0,8, и RMSE, близкой к 400 кг/га. С увеличением категорий кластеризации точность прогнозирования урожайности риса сначала значительно возрастает, а затем в основном остается стабильной. Стоит упомянуть, что когда достигается наивысшая точность прогнозирования урожайности риса, количество категорий кластеризации, характеризуемых различными кривыми вегетационных индексов временных рядов, варьируется, и количество категорий может быть шесть, семь или восемь.
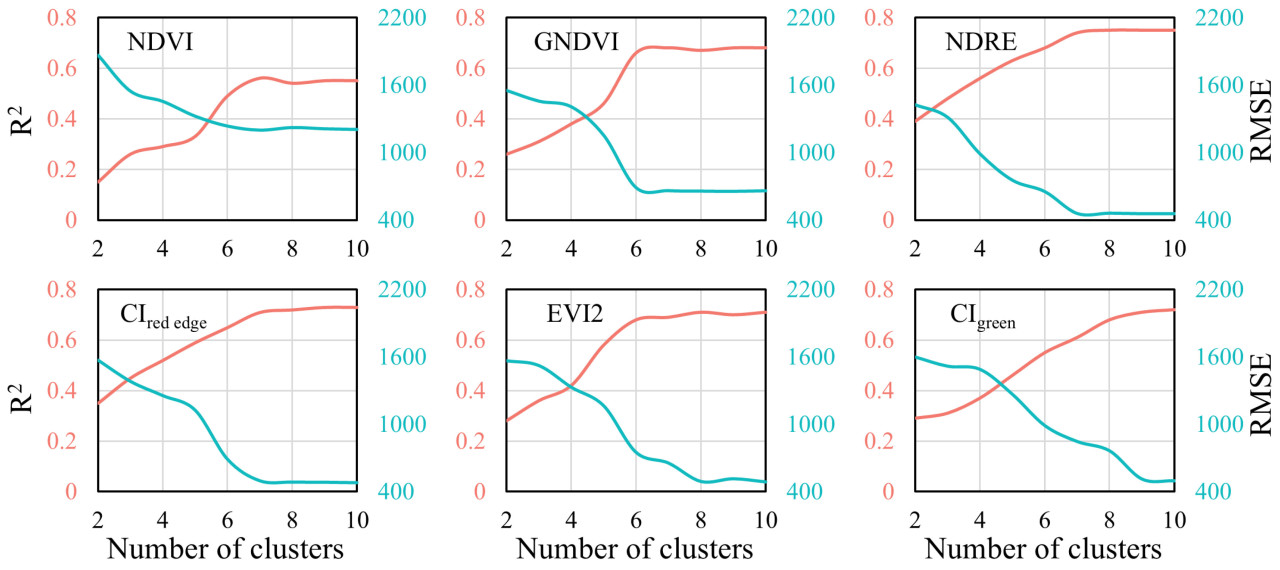
Рисунок 10. Тенденции результатов оценки урожайности риса за несколько периодов на основе кластеризации кривых вегетационных индексов временных рядов.
GNDVI требует кластеризации 289 образцов всего на шесть различных групп, что является наименьшим количеством категорий, необходимых для достижения наилучшей точности прогноза урожайности риса. Однако CIgreen необходимо сгруппировать в девять групп для достижения наилучшей точности оценки. Когда NDVI группируется в семь групп, достигается наилучшая точность. Тем не менее, есть возможности для улучшения точности оценки урожайности риса по сравнению с другими вегетационными индексами. При оценке урожайности с использованием кривой NDVI наивысшая точность R² была менее 0,6, а RMSE была больше 1200 кг/га. На основе временных рядов других вегетационных индексов максимальная точность оценки урожайности R² составила приблизительно 0,7, с RMSE примерно 500 кг/га. С R² почти 0,75 и RMSE примерно 400 кг/га, оценка урожайности риса на основе кривой индекса красного края демонстрирует наивысшую общую точность. Предыдущие результаты показали, что характеристики временных рядов вегетационных индексов, в частности индексов красного края, которые оказывают наибольшее влияние на оценку урожайности риса, могут точно описывать характеристики роста риса за весь период.
3.3.3. Кластеризация на основе кривых CH и CV временных рядов
Аналогично кластеризации кривых отражательной способности и вегетационных индексов временных рядов, для CH и CV с помощью алгоритма k-shape были сгруппированы разные категории. В каждой категории образцов соответствующие переменные нескольких периодов использовались для прогнозирования урожайности, и результаты показаны на Рисунке 11. Можно обнаружить, что с увеличением категорий кластеризации правило изменения точности прогнозирования урожайности риса на основе характеристик кривых временных рядов CH и CV показывает схожую тенденцию. Точность оценки урожайности достигает своего пика, когда количество категорий кластеризации увеличивается с двух до шести. При продолжении увеличения категорий кластеризации точность оценки урожайности остается стабильной. R² модели оценки риса на основе кластеризации временных характеристик CV составляет более 0,8, а RMSE — около 300 кг/га. После использования временной кривой CH для реализации разделения образцов на две и шесть категорий точность R² увеличивается более чем на 0,4, а RMSE снижается более чем на 1000 кг/га. После использования временной кривой CV для реализации разделения образцов на две и шесть категорий точность R² увеличивается примерно на 0,5, а RMSE снижается более чем на 1200 кг/га. Вышеуказанные результаты показывают, что характеристики CH и CV временного ряда могут хорошо характеризовать рост риса за весь период. Точность оценки урожайности риса на основе кривых временных рядов CV была выше, чем на основе характеристик CH. Оценка урожайности риса на основе кривых временных рядов CH и CV была точнее, чем на основе характеристик отражательной способности и вегетационных индексов.
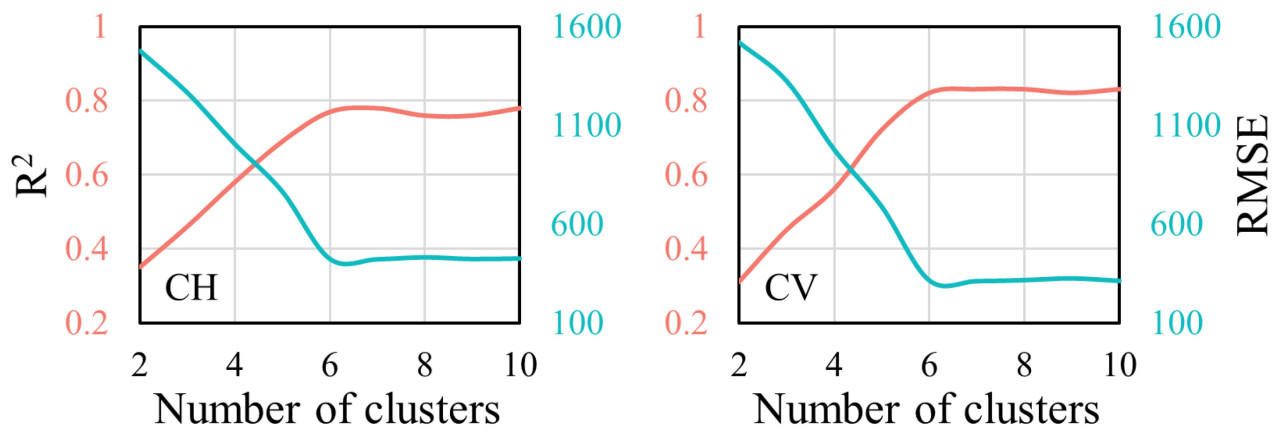
Рисунок 11. Тенденции результатов оценки урожайности риса за несколько периодов на основе кластеризации кривых CH и CV временных рядов.
На Рисунке 12 отображены результаты оценки урожайности риса в Эксп. 1 на основе чисел семь, шесть и шесть для групп кластеризации NDRE, CH и CV соответственно. При R² 0,82 и RMSE 315,39 кг/га очевидно, что оценка урожайности риса на основе временных характеристик CV имеет наивысшую точность. Точность оценки урожайности риса на основе временных характеристик NDRE и CH несколько хуже. Модель, основанная на кластеризации характеристик кривых временных рядов NDRE, имеет более низкую RMSE 1054,95 кг/га и улучшенный R² 0,42 по сравнению с точностью оценки урожайности риса с использованием многопериодного NDRE. Модель, основанная на кластеризации характеристик кривых временных рядов CH, имеет более низкую RMSE 1165,79 кг/га и улучшенный R² 0,52 по сравнению с точностью оценки урожайности риса с использованием многопериодного CH. С пониженной RMSE 1301,54 кг/га и улучшенным R² 0,6 модель, основанная на кластеризации характеристик кривых временных рядов CV, превосходит точность оценки урожайности риса с использованием многопериодного CV. С точки зрения распределения прогнозируемых значений урожайности риса, результаты прогноза урожайности на основе временных характеристик NDRE, CH и CV все показывают стандартное нормальное распределение, которое согласуется с распределением измеренных значений. Это также указывает на то, что метод показывает превосходную производительность как при оценке высоких, так и низких значений урожайности без явного завышения и занижения. При сравнении спектральных и структурных характеристик, точность оценки урожайности риса на основе временных характеристик CH и CV была на 35,67 кг/га и 143,96 кг/га ниже, чем RMSE точности модели на основе временных характеристик NDRE, соответственно. Это демонстрирует突出的ную роль характеристик роста структурных параметров в оценке урожайности риса.
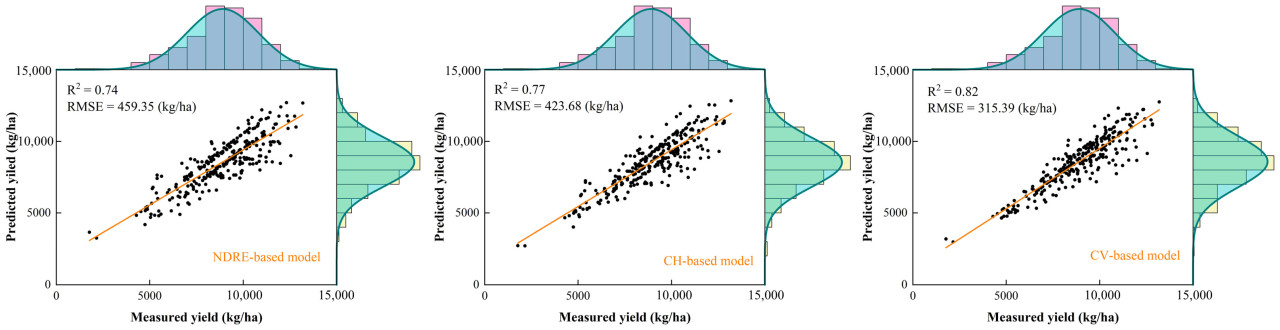
Рисунок 12. Сравнение результатов оценки урожайности риса на основе кластеризации характеристик кривых временных рядов NDRE, CH и CV в Эксп. 1.
3.4. Проверка моделей прогнозирования урожайности риса
Эксп. 2 служил независимым набором проверки для моделей кластеризации кривых характеристик временных рядов NDRE, CH и CV, чтобы подтвердить преимущества метода кластеризации кривых характеристик роста риса в прогнозировании урожайности, а также переносимость модели. Результаты отображены на Рисунке 13. Очевидно, что метод, основанный на кластеризации характеристик временных кривых, хорошо справляется с расчетом урожайности многогенотипного риса. Аналогично результатам Эксп. 1, модель оценки урожайности риса на основе временных характеристик CV достигает наилучшей точности проверки с R² = 0,85, RMSE = 282,41 кг/га. R² = 0,82, RMSE = 309,62 кг/га и R² = 0,78, RMSE = 463,69 кг/га — это результаты модели оценки урожайности риса на основе временных характеристик CH и NDRE, соответственно. Распределение измеренных данных урожайности Эксп. 2 показывает, что значения урожайности риса следуют нормальному распределению. Распределение прогнозируемых значений риса также соответствует стандартному нормальному распределению. Выводы показывают, что метод использования кластеризации кривых характеристик роста риса может успешно повысить точность оценки урожайности у многогенотипного риса.
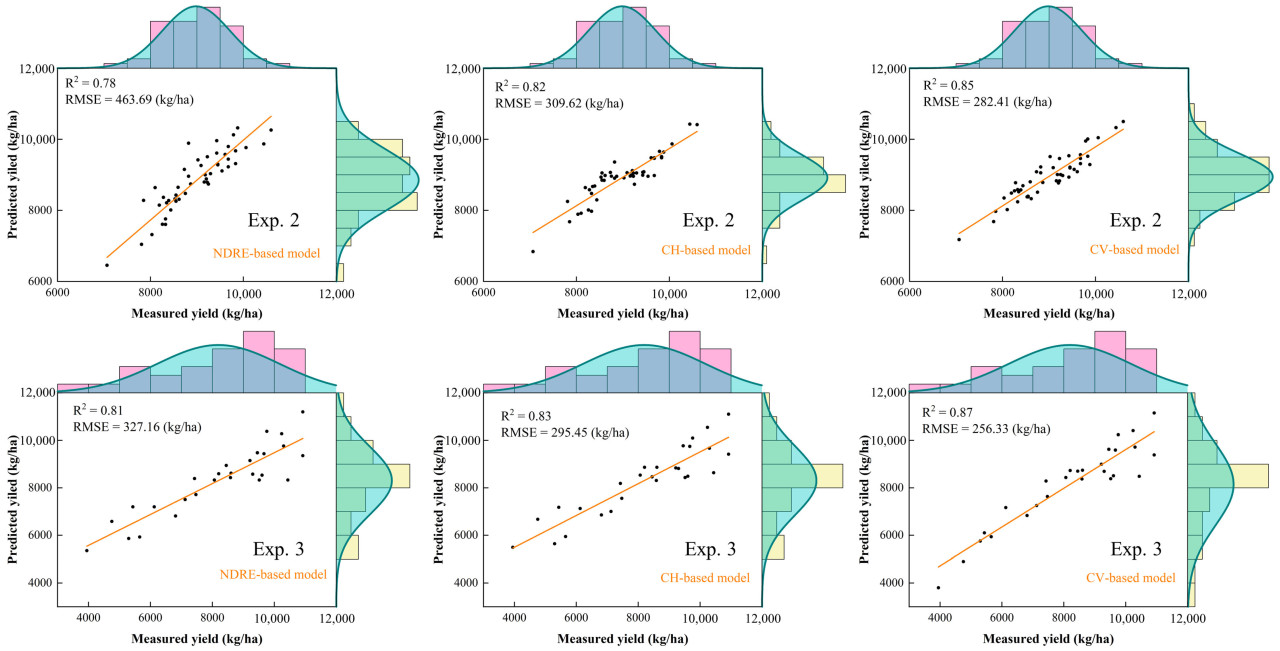
Рисунок 13. Сравнение результатов оценки урожайности риса на основе кластеризации характеристик кривых многопериодных NDRE, CH и CV в Эксп. 2 и Эксп. 3.
Как и в случае с Эксп. 2, данные, полученные из Эксп. 3, были использованы для независимой проверки, и результаты показаны на Рисунке 13. В отличие от Эксп. 2, Эксп. 3 содержал меньше генотипов риса. Однако Эксп. 3 включал более выраженную генотипическую изменчивость, поскольку один сорт был японским рисом. Видно, что метод, основанный на кластеризации характеристик временных рядов дистанционного зондирования, показал удовлетворительную точность. Порядок точности прогнозирования урожайности риса для различных характеристик остается consistent с таковым в Экспериментах 1 и 2. Результаты дополнительно демонстрируют осуществимость предложенного метода для оценки урожайности риса в сложных сценариях.
4. Обсуждение
Формирование урожайности риса — это длительный процесс накопления, на который влияют множественные факторы [34]. В дистанционном зондировании оценки урожайности модели оценки урожайности могут быть получены на основе одной стадии роста, но спектральная информация нескольких стадий роста в течение сезона выращивания риса может более полно отражать процесс формирования урожайности [7,35]. В данном исследовании, на основе двух лет независимых полевых экспериментов с несколькими генотипами риса, процесс роста различных генотипов риса характеризовался с использованием параметров характеристики роста, включая вегетационный индекс, высоту полога и объем полога, на основе получения RGB и мультиспектральных изображений на протяжении всей стадии роста. Алгоритм k-shape был применен для реализации кластеризации генотипов риса с различными схожими характеристиками роста. В конечном итоге, высокоточное прогнозирование урожайности многогенотипного риса было достигнуто с использованием многопериодных характеристик дистанционного зондирования. По сравнению с традиционным прогнозированием урожайности с использованием спектральных, вегетационных индексов или геометрических характеристик напрямую, модель имеет более высокую точность и стабильность.
Спектральная информация, особенно вегетационные индексы, давно признана полезным индикатором параметров роста сельскохозяйственных культур и оценки урожайности [36,37]. Например, индекс площади листьев, содержание хлорофилла и биомасса риса, пшеницы и кукурузы могут быть извлечены с высокой точностью с использованием вегетационных индексов [38,39,40]. Поскольку различные вегетационные индексы использовались для более тонких исследований, считается, что вегетационные индексы на основе диапазона красного края имеют более высокую точность и более стабильные результаты в мониторинге роста сельскохозяйственных культур [41,42]. Индексы красного края также показали лучшие результаты, чем традиционные вегетационные индексы, для оценки урожайности сельскохозяйственных культур [43,44]. Кроме того, некоторые структурные параметры, такие как покрытие полога, высота полога и объем полога, были предложены для улучшения параметров роста сельскохозяйственных культур и оценки урожайности [15]. Многочисленные исследования показали, что в густо растущей растительности структурные параметры могут компенсировать недостаток спектральной информации и помочь улучшить оценку параметров характеристик роста сельскохозяйственных культур [17,45,46].
В данном исследовании было обнаружено, что точность модели была низкой при оценке урожайности риса с использованием вегетационных индексов и структурных параметров одного периода. После объединения многопериодных показателей дистанционного зондирования корреляция с урожайностью значительно улучшилась (Рисунок 7). Поскольку показатели дистанционного зондирования в несколько периодов несут различную информацию о росте риса, и урожайность риса является совокупным результатом накопления и распределения биомассы в различные периоды [5]. Выражение для различий в урожайности облегчается за счет использования данных мониторинга на отдельных стадиях [18]. Это демонстрирует важность многопериодных характеристик роста в прогнозировании конечной урожайности риса. Однако многосортовой рис проявляет различные характеристики роста при моделировании выращивания риса в реальных полевых условиях. В результате точность оценки урожайности с использованием комбинации многопериодных вегетационных индексов остается низкой (Рисунок 8). Прямые сравнения различий в урожайности не могли быть сделаны из-за вариаций в циклах роста различных генотипов риса, что приводило к тому, что наблюдаемые данные не находились в одном измерении роста. В этом контексте точность оценки урожайности риса на основе многопериодных характеристик дистанционного зондирования значительно улучшилась после кластеризации характеристик роста риса с использованием k-shape. Разделение сортов с distinct характеристиками роста позволяет напрямую сравнивать урожайность нескольких сортов в одном измерении. Из Рисунка 9 мы наблюдаем, что точность оценки урожайности риса на основе характеристик кривых временных рядов отражательной способности в диапазоне красного края значительно лучше, чем при использовании характеристик других диапазонов. Результаты на Рисунке 10 указывают, что модели оценки урожайности, сгруппированные с кривыми характеристик временных рядов индексов красного края (NDRE и CIred edge), имеют более высокую точность и стабильность по сравнению с другими вегетационными индексами. Эти выводы дополнительно демонстрируют突出的ную роль диапазонов красного края в оценке урожайности риса. Точность оценки урожайности риса была дополнительно улучшена после использования кластеризации характеристик кривых временных рядов CH и CV (Рисунок 11). По сравнению с моделью кластеризации характеристик NDRE, модель, основанная на кластеризации структурных характеристик, нуждается только в кластеризации на шесть групп, чтобы получить более высокую и стабильную точность модели. Это указывает на то, что временные характеристики структурных параметров могут лучше отражать характеристики роста различных генотипов риса. Этот вывод согласуется с результатами предыдущих исследований, в которых использовались структурные параметры для повышения точности оценки урожайности сельскохозяйственных культур [47].
В данном исследовании данные, полученные из Эксп. 1, использовались для перекрестной проверки с десятью подвыборками, что привело к высокоточная модель оценки. На этой основе Эксп. 2 использовался для независимой проверки. Результаты показывают, что точность оценки в Эксп. 2 выше, чем точность модели в Эксп. 1 на основе соответствующих моделей временных характеристик NDRE, CH и CV. Это также показывает, что на точность модели, предложенной в данном исследовании, влияет количество образцов. Эксп. 2 содержал 48 различных сортов риса, что значительно меньше, чем 289 образцов в Эксп. 1. Это также косвенно указывает на то, что сложность характеристик роста различных генотипов риса в Эксп. 2 ниже, чем у риса в Эксп. 1. Из кластеризации различных показателей дистанционного зондирования можно наблюдать, что существуют различия в количестве кластеров характеристик роста различной сложности при получении наивысшей точности оценки урожайности риса. Например, точность оценки урожайности на основе кластеризации характеристик кривых спектральной отражательной способности нестабильна. Количество категорий на основе кластеризации характеристик кривых вегетационных индексов велико. Это, скорее всего, связано с тем, что спектральная информация подвержена влиянию вариаций освещения и структуры полога, что приводит к чрезмерно сложным характеристикам кривых [48,49]. Извлеченные структурные особенности риса менее подвержены влиянию таких факторов, как свет; следовательно, можно получить более стабильную точность модели. Это также можно проверить в Эксп. 3.
На следующем этапе данного исследования будут изучены дополнительные переменные, которые могут эффективно характеризовать процесс роста риса. В то же время основное внимание будет уделено факторам, влияющим на характеристики роста риса. Примеры включают стадию роста, методы управления полями, плотность посадки и тип сорта. На основе этого будут разработаны дополнительные интерпретируемые методы кластеризации генотипов. Кроме того, мы изучим, exactly какие периоды влияют на конечную урожайность, как способ упростить цикл сбора данных.
Объектом данного исследования является многогенотипный рис в масштабе делянки. Эксперименты и проверка не проводились в других сценариях, таких как градиент азота, стрессовые среды, различные плотности посадки и системы земледелия. В существующих исследованиях оценки урожайности в основном используются модели линейной регрессии для одного сорта, а также для сценариев экспериментов с контролем азотных удобрений [17]. Модели машинного обучения и глубокого обучения в основном используются для оценки урожайности многогенотипных сельскохозяйственных культур [22,50]. Исследования, аналогичные настоящему, по оценке урожайности после автоматической классификации нескольких генотипов риса, не сообщались.
5. Выводы
В данном исследовании был предложен высокоточный метод прогнозирования для многогенотипного риса, основанный на изображениях дистанционного зондирования временных рядов и кластеризации динамических процессов роста. Структурная и спектральная информация рисового полога, включая CH, CV и некоторые вегетационные индексы, была извлечена за весь период с использованием RGB и мультиспектральных изображений соответственно. Кривые отражательной способности, VI, CH и CV временных рядов использовались в качестве представителей процесса роста риса для кластеризации многогенотипного риса. Результаты показали, что диапазоны красного края превосходят другие диапазоны в кластеризации кривых временных рядов отражательной способности для оценки урожайности. При оценке урожайности риса с использованием кластеризации характеристик кривых временных рядов VI точность оценки урожайности риса существенно улучшилась по сравнению с моделью отражательной способности, особенно при использовании индексов красного края. При использовании кластеризации характеристик временных рядов CH и CV для оценки урожайности риса точность модели была дополнительно улучшена, и распределение прогнозируемой урожайности соответствовало стандартному нормальному распределению, как и измеренные данные, демонстрируя, что оно может хорошо адаптироваться к прогнозированию как высоких, так и низких значений урожайности риса. Оценка урожайности риса на основе временных характеристик CV имела наивысшую точность с R² 0,82 и RMSE 315,39 кг/га. Предложенный метод может эффективно решить проблему низкой точности оценки урожайности многогенотипного риса и помочь в точном управлении в условиях естественного выращивания риса.
Cсылки
1. Sagart, L. How Many Independent Rice Vocabularies in Asia? Rice 2011, 4, 121–133. [Google Scholar] [CrossRef]
2. Satoh, R.; Tsuge, I.; Tokuda, R.; Teshima, R. Analysis of the distribution of rice allergens in brown rice grains and of the allergenicity of products containing rice bran. Food Chem. 2019, 276, 761–767. [Google Scholar] [CrossRef]
3. Liao, C.J.; Fang, S.L.; Zhang, H.D.; Liu, L.S.; Xie, J.X.; Li, X.; Cao, F.B.; Chen, J.N.; Huang, M. Grain Yield and Yield Attributes of Currently Popular Hybrid Rice Varieties Compared to Representative Super Hybrid Rice Varieties in Subtropical Environments. Agronomy 2024, 14, 11. [Google Scholar] [CrossRef]
4. Xue, H.Y.; Xu, X.G.; Zhu, Q.Z.; Meng, Y.; Long, H.L.; Li, H.L.; Song, X.Y.; Yang, G.J.; Yang, M.; Li, Y.F.; et al. Rice yield and quality estimation coupling hierarchical linear model with remote sensing. Comput. Electron. Agric. 2024, 218, 12. [Google Scholar] [CrossRef]
5. dela Torre, D.M.G.; Gao, J.; Macinnis-Ng, C. Remote sensing-based estimation of rice yields using various models: A critical review. Geo-Spat. Inf. Sci. 2021, 24, 580–603. [Google Scholar] [CrossRef]
6. Wang, F.L.; Wang, F.M.; Zhang, Y.; Hu, J.H.; Huang, J.F.; Xie, J.K. Rice Yield Estimation Using Parcel-Level Relative Spectra Variables From UAV-Based Hyperspectral Imagery. Front. Plant Sci. 2019, 10, 12. [Google Scholar] [CrossRef]
7. Yang, Q.; Shi, L.S.; Han, J.Y.; Zha, Y.Y.; Zhu, P.H. Deep convolutional neural networks for rice grain yield estimation at the ripening stage using UAV-based remotely sensed images. Field Crop. Res. 2019, 235, 142–153. [Google Scholar] [CrossRef]
8. Wang, F.M.; Yao, X.P.; Xie, L.L.; Zheng, J.Y.; Xu, T.Y. Rice Yield Estimation Based on Vegetation Index and Florescence Spectral Information from UAV Hyperspectral Remote Sensing. Remote Sens. 2021, 13, 19. [Google Scholar] [CrossRef]
9. Franch, B.; San Bautista, A.; Fita, D.; Rubio, C.; Tarrazó-Serrano, D.; Sánchez, A.; Skakun, S.; Vermote, E.; Becker-Reshef, I.; Uris, A. Within-Field Rice Yield Estimation Based on Sentinel-2 Satellite Data. Remote Sens. 2021, 13, 22. [Google Scholar] [CrossRef]
10. Soriano-González, J.; Angelats, E.; Martínez-Eixarch, M.; Alcaraz, C. Monitoring rice crop and yield estimation with Sentinel-2 data. Field Crop. Res. 2022, 281, 11. [Google Scholar] [CrossRef]
11. Yang, Q.; Shi, L.S.; Han, J.Y.; Chen, Z.W.; Yu, J. A VI-based phenology adaptation approach for rice crop monitoring using UAV multispectral images. Field Crop. Res. 2022, 277, 13. [Google Scholar] [CrossRef]
12. Xu, S.Z.; Xu, X.A.; Zhu, Q.Z.; Meng, Y.; Yang, G.J.; Feng, H.K.; Yang, M.; Zhu, Q.L.; Xue, H.Y.; Wang, B.B. Monitoring leaf nitrogen content in rice based on information fusion of multi-sensor imagery from UAV. Precis. Agric. 2023, 24, 2327–2349. [Google Scholar] [CrossRef]
13. Li, B.; Xu, X.M.; Zhang, L.; Han, J.W.; Bian, C.S.; Li, G.C.; Liu, J.G.; Jin, L.P. Above-ground biomass estimation and yield prediction in potato by using UAV-based RGB and hyperspectral imaging. ISPRS-J. Photogramm. Remote Sens. 2020, 162, 161–172. [Google Scholar] [CrossRef]
14. Maimaitijiang, M.; Sagan, V.; Sidike, P.; Hartling, S.; Esposito, F.; Fritschi, F.B. Soybean yield prediction from UAV using multimodal data fusion and deep learning. Remote Sens. Environ. 2020, 237, 20. [Google Scholar] [CrossRef]
15. Ashapure, A.; Jung, J.H.; Chang, A.J.; Oh, S.; Yeom, J.; Maeda, M.; Maeda, A.; Dube, N.; Landivar, J.; Hague, S.; et al. Developing a machine learning based cotton yield estimation framework using multi-temporal UAS data. ISPRS-J. Photogramm. Remote Sens. 2020, 169, 180–194. [Google Scholar] [CrossRef]
16. Xu, L.; Ming, D.P.; Du, T.Y.; Chen, Y.Y.; Dong, D.H.; Zhou, C.H. Delineation of cultivated land parcels based on deep convolutional networks and geographical thematic scene division of remotely sensed images. Comput. Electron. Agric. 2022, 192, 16. [Google Scholar] [CrossRef]
17. Feng, A.J.; Zhou, J.F.; Vories, E.D.; Sudduth, K.A.; Zhang, M.N. Yield estimation in cotton using UAV-based multi-sensor imagery. Biosyst. Eng. 2020, 193, 101–114. [Google Scholar] [CrossRef]
18. Zhou, X.; Zheng, H.B.; Xu, X.Q.; He, J.Y.; Ge, X.K.; Yao, X.; Cheng, T.; Zhu, Y.; Cao, W.X.; Tian, Y.C. Predicting grain yield in rice using multi-temporal vegetation indices from UAV-based multispectral and digital imagery. ISPRS-J. Photogramm. Remote Sens. 2017, 130, 246–255. [Google Scholar] [CrossRef]
19. Marcone, A.; Impollonia, G.; Croci, M.; Blandinières, H.; Pellegrini, N.; Amaducci, S. Garlic yield monitoring using vegetation indices and texture features derived from UAV multispectral imagery. Smart Agric. Technol. 2024, 8, 13. [Google Scholar] [CrossRef]
20. Yuan, J.H.; Zhang, Y.L.; Zheng, Z.J.; Yao, W.; Wang, W.S.; Guo, L.F. Grain Crop Yield Prediction Using Machine Learning Based on UAV Remote Sensing: A Systematic Literature Review. Drones 2024, 8, 27. [Google Scholar] [CrossRef]
21. Fan, J.H.; Zhou, J.; Wang, B.W.; de Leon, N.; Kaeppler, S.M.; Lima, D.C.; Zhang, Z. Estimation of Maize Yield and Flowering Time Using Multi-Temporal UAV-Based Hyperspectral Data. Remote Sens. 2022, 14, 16. [Google Scholar] [CrossRef]
22. Shi, G.W.; Du, X.; Du, M.W.; Li, Q.Z.; Tian, X.L.; Ren, Y.T.; Zhang, Y.; Wang, H.Y. Cotton Yield Estimation Using the Remotely Sensed Cotton Boll Index from UAV Images. Drones 2022, 6, 23. [Google Scholar] [CrossRef]
23. Zhang, C.S.; Diao, C.Y. A Phenology-guided Bayesian-CNN (PB-CNN) framework for soybean yield estimation and uncertainty analysis. ISPRS-J. Photogramm. Remote Sens. 2023, 205, 50–73. [Google Scholar] [CrossRef]
24. Pei, J.; Tan, S.F.; Zou, Y.P.; Liao, C.H.; He, Y.N.; Wang, J.; Huang, H.B.; Wang, T.X.; Tian, H.F.; Fang, H.J.; et al. The role of phenology in crop yield prediction: Comparison of ground-based phenology and remotely sensed phenology. Agric. For. Meteorol. 2025, 361, 14. [Google Scholar] [CrossRef]
25. Zhou, M.; Zheng, H.B.; He, C.; Liu, P.; Awan, G.M.; Wang, X.; Cheng, T.; Zhu, Y.; Cao, W.X.; Yao, X. Wheat phenology detection with the methodology of classification based on the time-series UAV images. Field Crop. Res. 2023, 292, 12. [Google Scholar] [CrossRef]
26. Martinez-Tejada, I.; Riedel, C.S.; Juhler, M.; Andresen, M.; Wilhjelm, J.E. k-Shape clustering for extracting macro-patterns in intracranial pressure signals. Fluids Barriers CNS 2022, 19, 13. [Google Scholar] [CrossRef] [PubMed]
27. Rouse, J.W. Monitoring the vernal advancement and retrogradation (greenwave effect) of natural vegetation. In Technical Report, Progress Report RSC 1978-2 for NASA, Greenbelt, USA; NASA: Washington, DC, USA, 1974. [Google Scholar]
28. Gitelson, A.A.; Merzlyak, M.N. Signature analysis of leaf reflectance spectra: Algorithm development for remote sensing of chlorophyll. J. Plant Physiol. 1996, 148, 494–500. [Google Scholar] [CrossRef]
29. Fitzgerald, G.J.; Rodriguez, D.; Christensen, L.K.; Belford, R.; Sadras, V.O.; Clarke, T.R. Spectral and thermal sensing for nitrogen and water status in rainfed and irrigated wheat environments. Precis. Agric. 2006, 7, 233–248. [Google Scholar] [CrossRef]
30. Gitelson, A.A.; Gritz, Y.; Merzlyak, M.N. Relationships between leaf chlorophyll content and spectral reflectance and algorithms for non-destructive chlorophyll assessment in higher plant leaves. J. Plant Physiol. 2003, 160, 271–282. [Google Scholar] [CrossRef] [PubMed]
31. Jiang, Z.Y.; Huete, A.R.; Didan, K.; Miura, T. Development of a two-band enhanced vegetation index without a blue band. Remote Sens. Environ. 2008, 112, 3833–3845. [Google Scholar] [CrossRef]
32. Gitelson, A.A.; Keydan, G.P.; Merzlyak, M.N. Three-band model for noninvasive estimation of chlorophyll, carotenoids, and anthocyanin contents in higher plant leaves. Geophys. Res. Lett. 2006, 33, 5. [Google Scholar] [CrossRef]
33. Wang, X.; Song, R.B.; Xiao, J.M.; Li, T.; Li, X.Q. Accelerating k-Shape Time Series Clustering Algorithm Using GPU. IEEE Trans. Parallel Distrib. Syst. 2023, 34, 2718–2734. [Google Scholar] [CrossRef]
34. Wang, F.M.; Wang, F.L.; Hu, J.H.; Xie, L.L.; Yao, X.P. Rice Yield Estimation Based on an NPP Model With a Changing Harvest Index. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2020, 13, 2953–2959. [Google Scholar] [CrossRef]
35. Yang, R.; Zhou, J.; Lu, X.Y.; Shen, J.X.; Chen, H.Z.; Chen, M.Y.; He, Y.; Liu, F. A robust rice yield estimation framework developed by grading modeling and normalized weight decision-making strategy using UAV imaging technology. Comput. Electron. Agric. 2023, 215, 13. [Google Scholar] [CrossRef]
36. Wang, Z.L.; Tan, X.M.; Ma, Y.M.; Liu, T.; He, L.M.; Yang, F.; Shu, C.H.; Li, L.L.; Fu, H.; Li, B.; et al. Combining canopy spectral reflectance and RGB images to estimate leaf chlorophyll content and grain yield in rice. Comput. Electron. Agric. 2024, 221, 15. [Google Scholar] [CrossRef]
37. Guo, Y.H.; Wang, H.X.; Wu, Z.F.; Wang, S.X.; Sun, H.Y.; Senthilnath, J.; Wang, J.Z.; Bryant, C.R.; Fu, Y.S. Modified Red Blue Vegetation Index for Chlorophyll Estimation and Yield Prediction of Maize from Visible Images Captured by UAV. Sensors 2020, 20, 16. [Google Scholar] [CrossRef] [PubMed]
38. Li, S.Y.; Yuan, F.; Ata-Ui-Karim, S.T.; Zheng, H.B.; Cheng, T.; Liu, X.J.; Tian, Y.C.; Zhu, Y.; Cao, W.X.; Cao, Q. Combining Color Indices and Textures of UAV-Based Digital Imagery for Rice LAI Estimation. Remote Sens. 2019, 11, 21. [Google Scholar] [CrossRef]
39. Wang, A.C.; Song, Z.S.; Xie, Y.W.; Hu, J.; Zhang, L.Y.; Zhu, Q.Z. Detection of Rice Leaf SPAD and Blast Disease Using Integrated Aerial and Ground Multiscale Canopy Reflectance Spectroscopy. Agriculture 2024, 14, 19. [Google Scholar] [CrossRef]
40. Li, F.; Piasecki, C.; Millwood, R.J.; Wolfe, B.; Mazarei, M.; Stewart, C.N. High-Throughput Switchgrass Phenotyping and Biomass Modeling by UAV. Front. Plant Sci. 2020, 11, 15. [Google Scholar] [CrossRef] [PubMed]
41. Qiao, L.; Zhao, R.M.; Tang, W.J.; An, L.L.; Sun, H.; Li, M.Z.; Wang, N.; Liu, Y.; Liu, G.H. Estimating maize LAI by exploring deep features of vegetation index map from UAV multispectral images. Field Crop. Res. 2022, 289, 14. [Google Scholar] [CrossRef]
42. Cheng, J.P.; Yang, H.; Qi, J.B.; Sun, Z.D.; Han, S.Y.; Feng, H.K.; Jiang, J.Y.; Xu, W.M.; Li, Z.H.; Yang, G.J.; et al. Estimating canopy-scale chlorophyll content in apple orchards using a 3D radiative transfer model and UAV multispectral imagery. Comput. Electron. Agric. 2022, 202, 15. [Google Scholar] [CrossRef]
43. Ali, N.; Mohammed, A.; Bais, A.; Berraies, S.; Ruan, Y.F.; Cuthbert, R.D.; Sangha, J.S. Field-Scale Precision: Predicting Grain Yield of Diverse Wheat Breeding Lines Using High-Throughput UAV Multispectral Imaging. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2024, 17, 11419–11433. [Google Scholar] [CrossRef]
44. Camenzind, M.P.; Yu, K. Multi temporal multispectral UAV remote sensing allows for yield assessment across European wheat varieties already before flowering. Front. Plant Sci. 2024, 14, 19. [Google Scholar] [CrossRef]
45. Yu, D.Y.; Zha, Y.Y.; Shi, L.S.; Jin, X.L.; Hu, S.; Yang, Q.; Huang, K.; Zeng, W.Z. Improvement of sugarcane yield estimation by assimilating UAV-derived plant height observations. Eur. J. Agron. 2020, 121, 16. [Google Scholar] [CrossRef]
46. Liu, T.; Wu, F.; Mou, N.N.; Zhu, S.L.; Yang, T.L.; Zhang, W.J.; Wang, H.; Wu, W.; Zhao, Y.Y.; Sun, C.M.; et al. The estimation of wheat yield combined with UAV canopy spectral and volumetric data. Food Energy Secur. 2024, 13, 17. [Google Scholar] [CrossRef]
47. Zhou, W.Q.; Song, C.; Liu, C.L.; Fu, Q.; An, T.H.; Wang, Y.J.; Sun, X.B.; Wen, N.; Tang, H.; Wang, Q. A Prediction Model of Maize Field Yield Based on the Fusion of Multitemporal and Multimodal UAV Data: A Case Study in Northeast China. Remote Sens. 2023, 15, 22. [Google Scholar] [CrossRef]
48. Luo, S.J.; Jiang, X.Q.; Yang, K.L.; Li, Y.J.; Fang, S.H. Multispectral remote sensing for accurate acquisition of rice phenotypes: Impacts of radiometric calibration and unmanned aerial vehicle flying altitudes. Front. Plant Sci. 2022, 13, 19. [Google Scholar] [CrossRef] [PubMed]
49. Muramatsu, K.; Yoneda, E.; Soyama, N.; Thanyapraneedkul, J.; López-Ballesteros, A. Use of light response curve parameters to estimate gross primary production capacity from chlorophyll indices of global observation satellite and flux data. Sci. Remote Sensing 2024, 10, 16. [Google Scholar] [CrossRef]
50. Li, D.H.; Sun, X.X.; Jia, Y.H.; Yao, Z.W.; Lin, P.Y.; Chen, Y.Y.; Zhou, H.B.; Zhou, Z.Q.; Wu, K.X.; Shi, L.L.; et al. A longan yield estimation approach based on UAV images and deep learning. Front. Plant Sci. 2023, 14, 17. [Google Scholar] [CrossRef]
Li Q, Zhao S, Du L, Luo S. Multi-Genotype Rice Yield Prediction Based on Time-Series Remote Sensing Images and Dynamic Process Clustering. Agriculture. 2025; 15(1):64. https://doi.org/10.3390/agriculture15010064
Перевод статьи «Multi-Genotype Rice Yield Prediction Based on Time-Series Remote Sensing Images and Dynamic Process Clustering» авторов Li Q, Zhao S, Du L, Luo S., оригинал доступен по ссылке. Лицензия: CC BY. Изменения: переведено на русский язык

















































































































Комментарии (0)