Оптимизация параметров обработки почвы для повышения эффективности заделки соломы в системе рисо-пшеничного севооборота
В системе рисо-пшеничного севооборота использование соломы для заделки в почву способствует улучшению ее здоровья и повышению продуктивности сельского хозяйства.
Аннотация
Эксперимент был проведен в июне 2024 года в городе Бабайцяо района Лухэ города Нанкин провинции Цзянсу с использованием трактора Shichao TG-500, оснащенного ротационной фрезой Qingxuan 1GKN-180. В ходе экспериментов с одним фактором и двухфакторным взаимодействием изучалось влияние трех способов обработки почвы — глубокой ротационной обработки с соломой (DRTS), мелкой ротационной обработки с соломой (SRTS) и нулевой обработки с возвратом соломы (NTSR) — на степень нарушения структуры почвы. На основе профилометрического анализа было установлено, что обработка DRTS вызывала наибольшее нарушение почвы, SRTS — умеренное, а NTSR — минимальное.
Дальнейшие исследования оценили влияние глубины обработки, скорости движения и скорости вращения фрез на коэффициент заделки соломы. Результаты показали, что повышение коэффициента заделки соломы существенно зависело от изменения глубины обработки и скорости вращения фрез, особенно при использовании более глубокой обработки и средних или высоких скоростей вращения. Исследование выявило, что скорость движения, скорость вращения фрез и глубина обработки объясняли общие показатели коэффициента заделки соломы, степени крошения почвы и ее выровненности.
В исследовании использовался план эксперимента методом поверхности отклика — Box-Behnken Design (BBD). Были определены следующие оптимальные параметры работы: глубина вспашки — 14,23 см, скорость вращения фрез — 297,6 об/мин и скорость движения — 3,23 км/ч. При этих параметрах были достигнуты следующие показатели: степень крошения почвы — 94,766%, коэффициент заделки соломы — 84,97% и выровненность почвы — 16,36 мм. Полученные результаты демонстрируют потенциал реализации стратегий через оптимизацию эксплуатационных параметров для значительного улучшения сельскохозяйственных практик.
1. Введение
Площадь возделывания риса и пшеницы, которая довольно распространена в современном мировом сельском хозяйстве, также очень важна для продовольственной стабильности и экономической поддержки сельского населения, особенно в таких частях мира, как Южная Азия, как подчеркивается в [ 1 , 2 ]. Этот тип земледелия обеспечивает фермеру большую урожайность, снижает эрозию почвы и улучшает плодородие почвы за счет внесения соломы или пожнивных остатков [ 3 , 4 ]. Использование операций по обработке почвы позволяет улучшить состояние почвы в отношении видов пожнивных остатков от культур, подготавливая почву для последующей посадки [ 5 , 6 ]. Тем не менее, основная роль технологического управления процессом обработки почвы заключается в оценке параметров внесения соломы на полях севооборота рис-пшеница. Пожнивные остатки, такие как солома риса и пшеницы, могут быть возвращены в почву для увеличения содержания органического вещества, мякоти и круговорота питательных веществ, тем самым улучшая общее состояние почвы [ 6 , 7 , 8 ]. Обработка почвы включает в себя смешивание соломы с почвой, что напрямую влияет на плодородие почвы, круговорот питательных веществ и содержание органического вещества [ 9 , 10 ]. Оптимальные параметры обработки почвы при внесении максимального количества соломы и в то же время сохранении почвы и эффективности операций являются сложной задачей. Для увеличения включения соломы в системы RW исследователи были заняты разработкой методов консервационной обработки почвы, которые могут лучше помочь в интеграции соломы в почву [ 11 , 12 ]. Исследование было сосредоточено на различных типах обработки, таких как соломенная нулевая обработка, мелкий поворот и глубокий поворот с соломой, чтобы определить степень нарушения почвы и возврата соломы в последовательности кукуруза–пшеница–кукуруза [ 13 , 14 ]. Результаты показали, что большая глубина проникновения и скорости вращения, отклоняющиеся от умеренных уровней, были необходимы для того, чтобы солома полностью смешалась с почвой. Кроме того, выводы также указали на актуальность этих типов обработки почвы. Факторы, влияющие на скорость возврата соломы в соответствии с результатами, описаны в [ 15 , 16 ]. Использование этих методов позволит увеличить долю органического вещества в почве и эффективность заделки соломы, которая зависит от следующих параметров роторного ножа: скорости его вращения, скорости движения и глубины обработки [ 17 , 18 , 19 ]. Однако для достижения оптимальной скорости измельчения почвы, эффективного заделывания соломы и ровности поверхности рабочая скорость роторного ножа и скорость движения орудия могут регулироваться [ 20 ]., 21 ]. Факторы обработки почвы на полях севооборота рис-пшеница могут быть изучены для улучшения включения соломы с помощью BBD и RSM [ 7 , 22 ]. На основе этих методов можно установить модель взаимодействия почвы и соломы вращающегося лезвия для определения переменных потребления мощности и качества работы при глубокой вращающейся обработке, а также структурных и эксплуатационных параметров [ 7 , 23 , 24 ]. Факторы, влияющие на оборудование для обработки почвы, также можно контролировать таким образом, чтобы обеспечить эффективное включение соломы путем применения BBD и RSM, как это предусмотрено в [ 22 , 24 ]. Испытания поверхности отклика Бокса-Бенкена проводились для каждого фактора на трех различных уровнях в процессе оптимизации. Это позволило сделать оценку в зависимости от скорости вращения лезвия и степени обработки, необходимой для получения необходимых результатов. Чтобы определить взаимосвязь и значимость компонентов и их отношений, в исследовании использовались сложные статистические данные, такие как регрессионный анализ и ANOVA. Учитывая использование приложений Design-Expert 13.0, данные были использованы в анализе для улучшения понимания оптимальных условий обработки почвы.
Необходимо глубокое понимание того, как использовать экспериментальные конструкции и статистические данные для улучшения параметров обработки почвы для лучшего перемешивания соломы, скорости разрушения почвы и выравнивания поверхности почвы. Следовательно, цель данного исследования - определить оптимальные настройки обработки почвы, которые также повысят скорость возврата соломы на почву, а также качество покрытия. В частности, изучается влияние таких факторов обработки, как скорость трактора, глубина обработки и скорость вращения ножа для полевого внесения. Данное исследование было сосредоточено на трех конкретных параметрах: скорости движения, скорости вращения вращающегося ножа и глубине слоя почвы. Нам необходимо это понимать, поскольку предыдущие исследования были больше направлены на выявление основных эффектов, а не на взаимодействие этих характеристик. Для улучшения заделки соломы в системах рис-пшеница, в данной статье предпринимается попытка калибровки рабочих условий роторной фрезы Qingxuan 1GKN-180. Данное исследование направлено на достижение следующих целей: (i) использование профилометра для точного измерения профиля почвы и графического представления для анализа индекса нарушения почвы; (ii) определение оптимального сочетания глубины обработки, скорости вращения ножей и скорости движения для максимального повышения эффективности заделки растительных остатков и качества обработки; и (iii) подтверждение оптимизированных параметров посредством полевых экспериментов. В рамках данного исследования систематически изучались параметры обработки, на основе которых можно определить подход к заделке соломы и управлению почвой.
2. Материалы и методы
Полевые испытания проводились в июне 2024 года в типичном плоскогорье Бабайцяо (118°59′ в.д., 31°98′ с.ш.), район Лухэ, Нанкин, провинция Цзянсу, Китай. Поле, засеянное яровой пшеницей, было подвергнуто испытанию на обработку сразу после уборки урожая. На суглинистых почвах этого региона производился севооборот риса и пшеницы. Результаты измерений характеристик почвы и соломы представлены в таблице 1 .
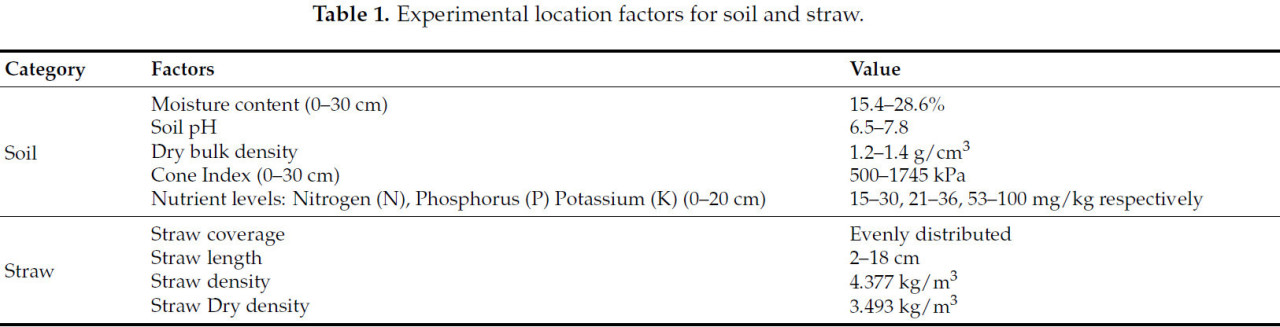
Таблица 1. Факторы размещения эксперимента для почвы и соломы.
2.1 Описание сельскохозяйственных тракторов и оборудования
Оборудование, использованное в этом исследовании, включало роторную фрезу Qingxuan 1GKN-180 и трактор Shichao TG-500. Трактор был произведен компанией Sichuan Shichao Agricultural Machinery Co., Ltd., расположенной в Чэнду, провинция Сычуань, Китай, в то время как роторная фреза была произведена компанией Nanjing Agricultural Machinery Co., Ltd., расположенной в Нанкине, Китай. Зацепление проводилось с помощью трактора Shichao TG-500 мощностью 45 л. с. Зацепление проводилось с помощью трактора Shichao TG-500 мощностью 45 л. с. Габариты TG-500 компактны: в частности, они составляют 2300 мм в длину, 1300 мм в ширину и 900 мм в высоту, что обеспечивает легкость маневрирования в ограниченных пространствах и узких коридорах. Им можно управлять в различных зонах и состояниях, и вы можете переключаться между 6 + 1 передачами. Задние колеса обеспечивают надежное сцепление, что позволяет добиться устойчивости на различных поверхностях. Колея передних колес составляет 400 мм, а задних — 600 мм.
В ходе полевого эксперимента солома возвращалась и смешивалась с почвой с помощью роторной фрезы 1ГКН-180. Для рисово-пшеничных стерневых рисовых полей роторная фреза 1ГКН-180 является популярным выбором, поскольку превосходит другие виды оборудования для возврата соломы по стабильности работы. Технические характеристики роторной фрезы 1ГКН-180 представлены в таблице 2 .
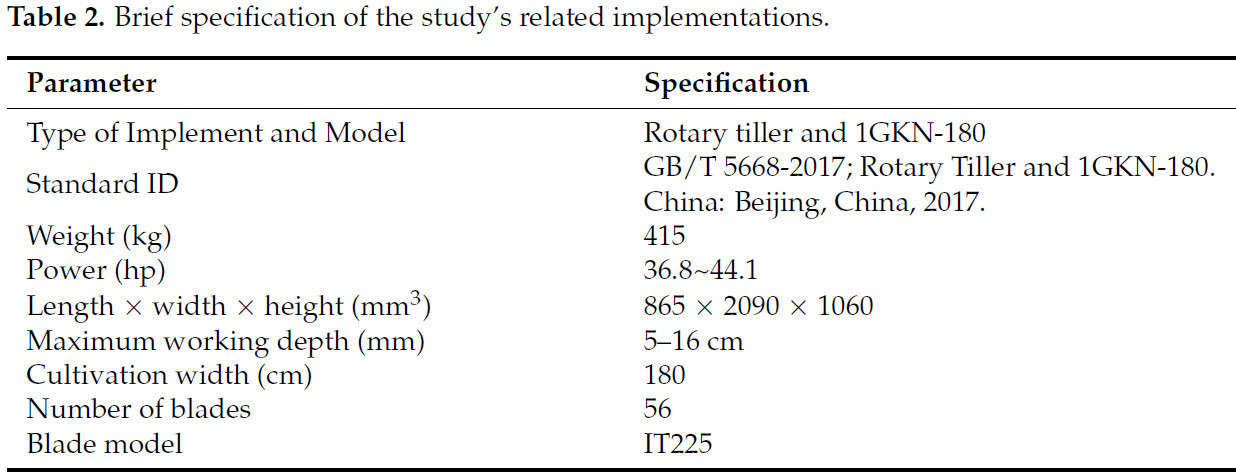
Таблица 2. Краткая спецификация реализаций исследования.
2.1.1 Общая структура и основные параметры
Ширина, длина вала и толщина основания роторного культиватора модели IT225 составляют 2300 мм, 200 мм и 22 мм соответственно. Когда валы лезвий двух соседних роторных культиваторов с общей положительной режущей кромкой вращаются, создается цилиндрическая форма. Зазор в 62 мм между центральными поверхностями двух культиваторов определяется рабочей шириной роторного культиватора IT225; это пространство не должно быть слишком большим, чтобы предотвратить зажим почвы [ 25 , 26 ]. На рисунке 1 показана общая компоновка соломоотбрасывающего аппарата. Рама редуктора, трехточечная система подвески, реальный осевой возвращающий режущий ролик и другие детали составляют большую часть аппарата. На рисунке 1 а изображена конструкция роторного культиватора 1ГКН-180. На рисунке 1 б показан роторный культиватор IT225, а на рисунке 1 г показано расположение лезвий. Вся машина может изменять рабочую глубину на ножевых валах в секции роторного плуга путем вытягивания стержня на раме подвески.
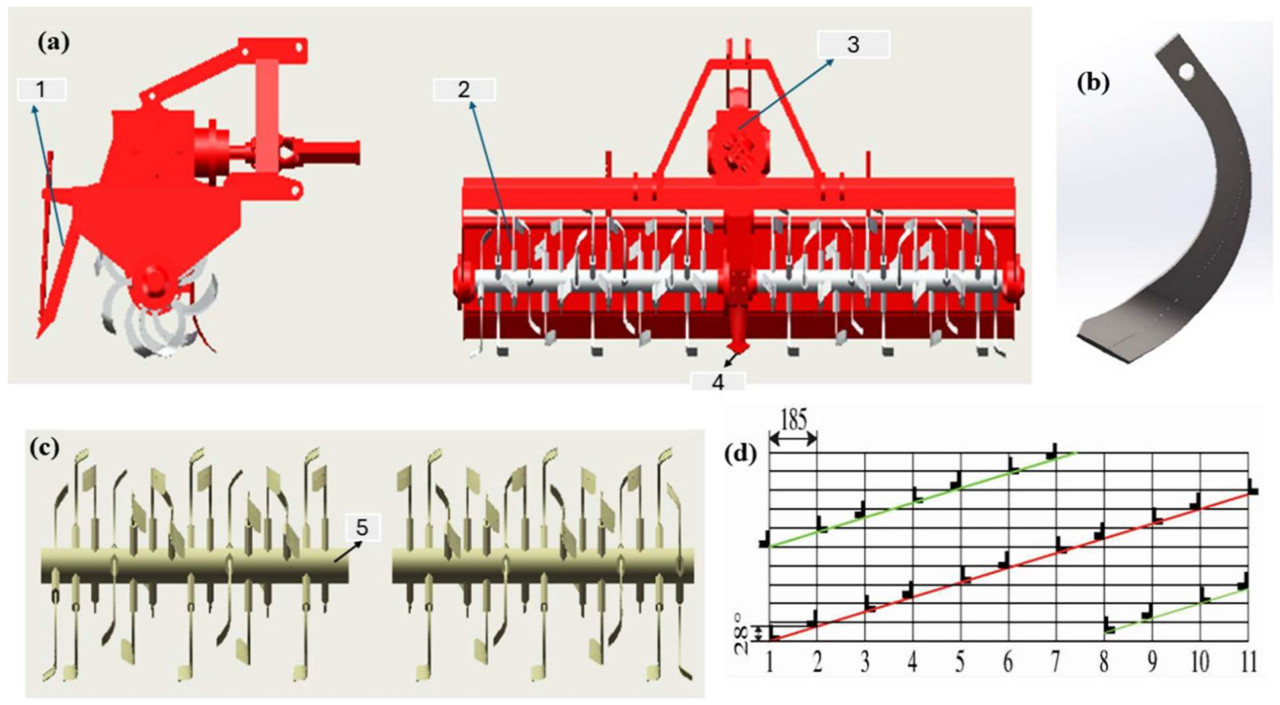
Рисунок 1. Структурная схема роторной почвообрабатывающей машины 1КГМ-180: 1. Ограждение, 2. Ножевой каток, 3. Трансмиссия, 4. Сошник, 5. Гнездо ножа. ( а ) Объемная структура роторной почвообрабатывающей машины; ( б ) Роторный нож IT255; ( в ) Роторный каток; ( г ) Расположение роторных ножей.
2.1.2 Принцип работы
Например, в случае роторной фрезы 1ГКН-180 вал отбора мощности (ВОМ) передает мощность трактора на редуктор роторной фрезы 1ГКН-180 для ее работы. С помощью этого редуктора вращательное движение ВОМ, создаваемое здесь, создает горизонтальное вращательное движение для ножей. Эта фреза имеет горизонтальный ротор, который поставляется с ножом IT255. При вращении эти ножи врезаются в землю, зачерпывают почву и одновременно разбивают ее на более мелкие, более обрабатываемые части. Это движение в сочетании с культивацией также способствует равномерному распределению органического вещества в почве и уничтожению сорняков [ 27 ]. Рабочая глубина может варьироваться от 5 см до 16 см в зависимости от типа возделываемой культуры или состояния почвы. Ширина фрезы составляет 180 см; это означает, что за один проход данных обрабатываются большие площади. На рисунке 2 показаны видимые характеристики модели; 1ГКН-180 — эффективное и многофункциональное орудие для подготовки почвы.
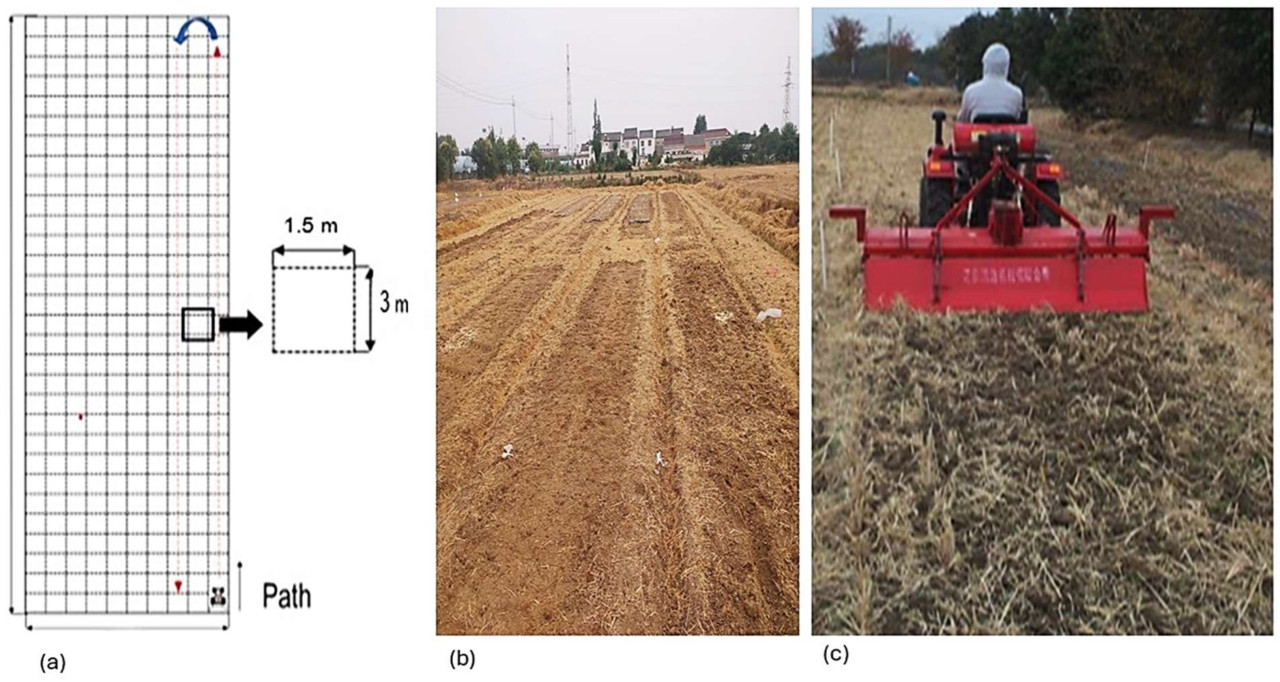
Рисунок 2. Расположение опытных площадей эксперимента: ( а ) концептуальная схема разделения сетки поля; ( б ) опытный участок поля; ( в ) трактор Shichao TG-500 и роторная фреза Qingxuan 1 GKN-180, используемые в полевом эксперименте.
2.1.3 Экспериментальный дизайн и обработка для полевых испытаний
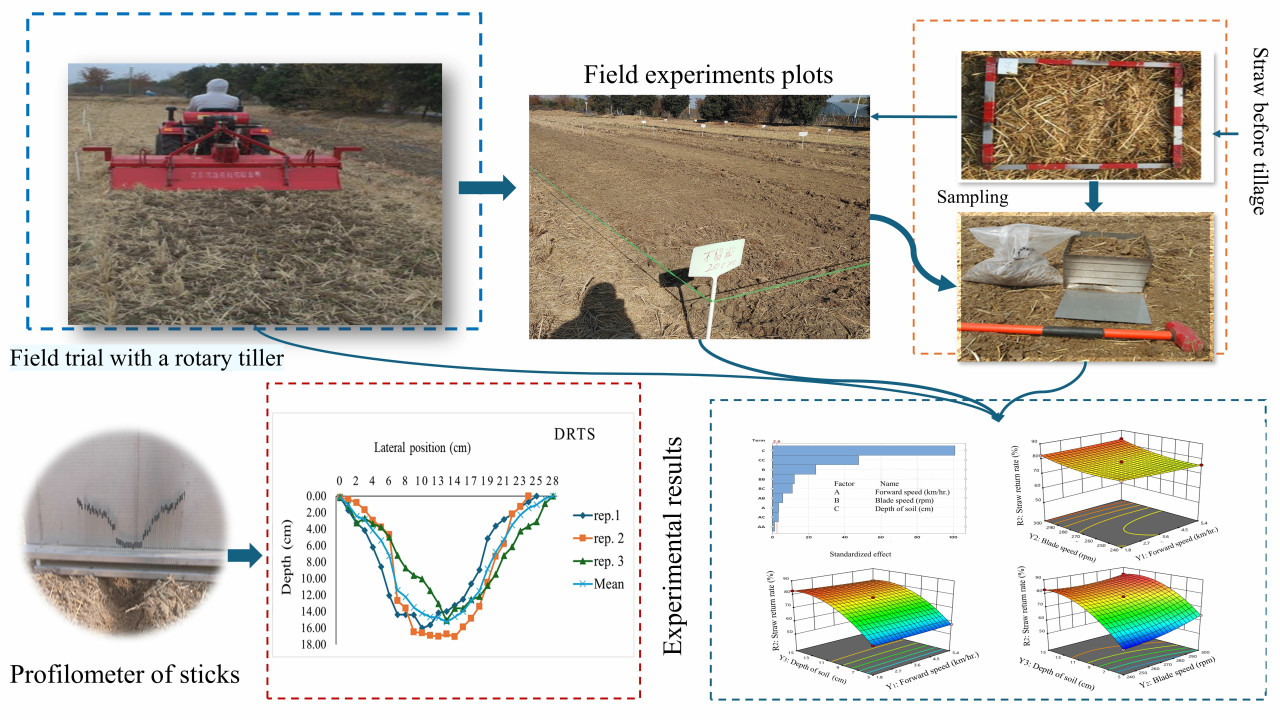
На рисунке 3 представлена экспериментальная схема оценки влияния обработки почвы и использования соломы на параметры почвы и эксплуатационную эффективность.
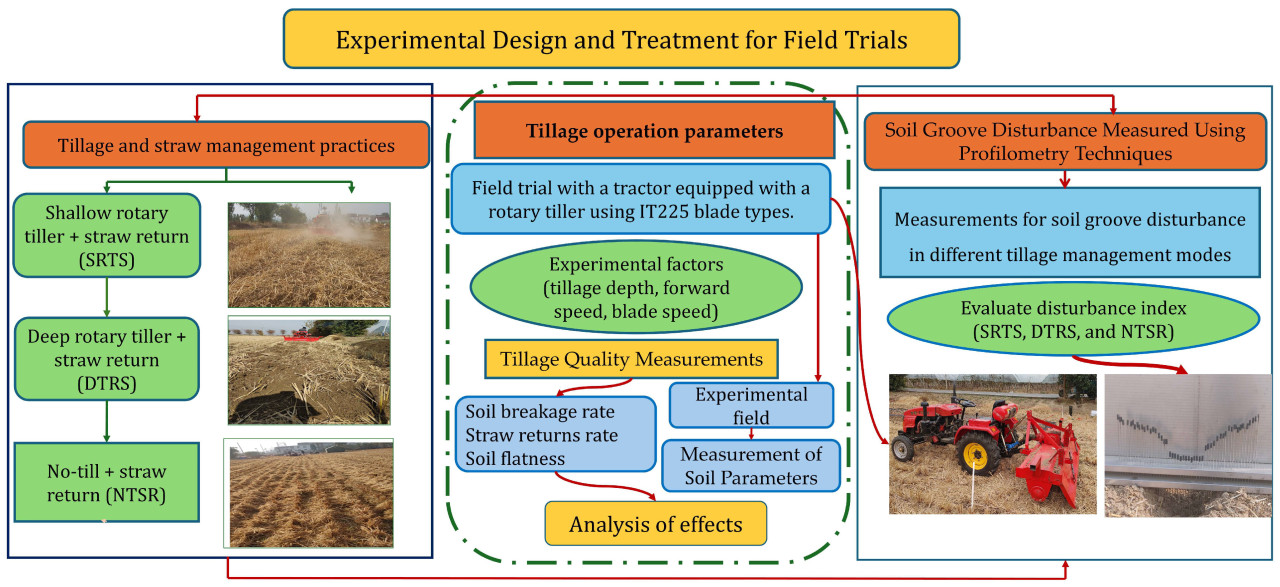
Рисунок 3. Блок-схема экспериментального поля и фотографии каждой процедуры обработки почвы, использованной в настоящем исследовании.
2.2 Измерение параметров почвы
Факторы почвенно-механического характера, такие как распределение размера частиц, индекс конусности, плотность насыпного материала, влажность, pH и уровни питательных веществ (N, P и K), являются основными параметрами, определяющими характер взаимодействия почвы и сельскохозяйственной техники с точки зрения физико-химических характеристик почвы. Таким образом, химические и физические свойства почвы должны быть количественно оценены [ 28 ]. Изучение физических свойств почвы имеет решающее значение. Метод испытаний разбит на общие категории при изучении характеристик почвы. Мы проводим испытания с помощью конусных пенетрометров. Усилие, необходимое для дробления определенного участка почвы, дает индекс прочности почвы (кПа) [ 29 ]. Гравиметрический подход использовался для определения содержания влаги в рисовой почве при использовании роторных культиваторов рисовой почвы 1ГКН-180 с использованием метода гравиметрии, а также была проведена работа роторной культиватора 1ГКН-180.
2.3. Нарушение почвенных канавок, измеренное с помощью методов профилометрии
Были проведены измерения для оценки нарушения почвенных бороздок при трёх режимах обработки: мелкоротационная фреза + возврат соломы (SRTS), глубокоротационная фреза + возврат соломы (DTRS) и нулевая обработка + возврат соломы (NTSR). Мы использовали профилометр для создания трёхмерного изображения рельефа поверхности и выявления наиболее выраженных нарушений, возникающих в точках взаимодействия почвы с орудиями при обработке. Степень нарушения изменялась в зависимости от способа обработки и уровня нарушения почвы после оценки индекса нарушения. Его можно описать следующим образом:

где A — мобилизованная площадь почвы (см2 ) , а D — максимальная глубина бороздки (см).
2.4 Параметры обработки почвы
Измерения качества обработки почвы включали скорость ломки почвы, скорость возврата соломы и шероховатость поверхности. После завершения ротационного перемешивания соломы с почвой был выбран опытный участок длиной 50 метров для измерения и расчета параметров качества в соответствии со стандартом 1ГКН-180 ГБ/Т 5668-2017. В качестве показателей оценивались скорость ломки почвы, скорость возврата соломы и ровность поверхности. Ниже описаны методы измерения и расчета этих показателей.
2.4.1 Скорость разрушения почвы
Уравнение скорости разрушения почвы было определено как процентное соотношение масс, занимаемых почвенными блоками с их наибольшими краями, не превышающими четырех сантиметров, относительно всех цепей в пределах горизонта обработки из выборочного участка размером 500 × 500 (мм) с указанной формулой [ 27 ] следующим образом:

где R 1 — скорость разрушения почвы, выраженная в %; m a — масса почвенных блоков в общем обрабатываемом слое, кг, длина наибольшей стороны которых меньше 4 см; m b — общий объем почвы в обрабатываемом слое, кг.
2.4.2. Коэффициенты возврата соломы
Важнейшей метрикой для оценки того, как солома движется с момента срезания до момента разложения, является скорость возврата соломы. Более высокая скорость возврата предполагает более эффективное смешивание и закапывание [ 30 , 31 ]. Мы использовали метод GB/T668 2017 «Rotary Tiller» при анализе скорости возврата соломы, которая была установлена путем сравнения количества соломы, оставшейся на уровне земли после ротационной обработки (операции вспашки). Затем на землю устанавливали рамку для образцов размером 0,3 м × 0,3 м. Рамку для образцов (0,3 м × 0,3 м) клали на землю. Солому над поверхностью земли собирали и взвешивали, в то время как солома, частично закопанная в почву, разрезали ножницами о поверхность земли.
Затем скорость возврата соломы оценивается на основе разницы в общем весе поверхностной соломы до и после ротационной обработки с использованием следующего уравнения:

где R 2 — коэффициент возврата соломы; P (кг) — общий вес соломы до вспашки; P 1 (кг) — общий вес соломы после вспашки.
2.4.3 Ровность почвы
Точность устройства профилирования поверхности, учитывающего движение трактора, продемонстрирована в [ 32 ]. Первым шагом в определении ровности почвы является усреднение измерений высоты вдоль каждого из десяти маршрутов (каждый из которых имеет пять точек измерения) до и после операции. Начальная опорная высота составляет 21 мм, что используется для определения средней высоты до процедуры (h−after), а измерения делятся на 40. Для количественной оценки ровности почвы вычисляют среднее абсолютное отклонение наблюдаемых высот от контрольной высоты после процедуры (href). Эти вычисления помогают оценить влияние деятельности на ровность почвы, предоставляя точную меру изменения [ 33 , 34 ].

где R 3 — ровность почвы, i — номер маршрута (от 1 до 10), а j — номер точки измерения (от 1 до 5) на этом маршруте.
2.4.4 Глубина обработки почвы
Система измерения глубины обработки почвы с помощью глубокорыхлителя имеет важное практическое значение, популяризацию и прикладную ценность; она эффективно изменяет глубину обработки и обеспечивает государственные субсидии в процессе обработки почвы [ 25 ]. Глубина обработки определялась путем помещения стальной линейки в почву и выбора глубины обработки, при которой глубина обработки была постоянной. Для измерения глубины обработки измерялись три точки с интервалом в один метр в каждом ряду, и всего было собрано 120 точек измерения по всем рядам [ 28 ]. Формулы, которые можно использовать для расчета глубины обработки, включают n, общее количество точек измерения. Это мера глубины вспашки, где h - глубина почвы (в см).

где h — средняя глубина обработки почвы (см), h i — глубина обработки почвы в i-й точке измерения (см), n — общее количество точек измерения.
2.4.5. Конструкция Бокс-Бенкена
В инструменты BBD и RSM включены три фактора. Одним из способов прогнозирования оптимального значения трёх факторов является использование модели полиномиального уравнения второго порядка [ 35 , 36 , 37 ]. В таблице 3 показано, что трёхуровневый трёхфакторный план экспериментов Бокса–Бенкена потребовал в общей сложности 17 серий испытаний. Модель имеет следующую конфигурацию:

где γ — ожидаемый ответ (скорость удаления фенола, %), используемый в качестве зависимой переменной, i = 1, 2, 3 и j = 1, 2, 3; β 0 , β i , и β ij — параметры коэффициента регрессии модели, а X i — входная управляющая кодированная переменная и, кроме того, естественная переменная операционной системы (X j ).

Таблица 3. Три фактора и три уровня оптимизации параметров обработки почвы.
2.5. Тестовый фактор
Основной целью полевого эксперимента является определение оптимальных рабочих параметров роторной фрезы 1ГКН-180, а также выяснение роли различных компонентов в заделывании соломы и качестве почвы. Эти переменные включают в себя частоту вращения ножа в об/мин, глубину обработки поля в см и скорость движения в км/ч конфигурации роторной фрезы. Существует три уровня для каждого компонента, и для их определения использовались следующие критерии. Скорость движения контролировалась на трех уровнях, 1,8, 3,6 и 5,4 (км/ч), чтобы обеспечить достаточное разрушение почвы. Согласно практическому испытанию, указанному для роторной фрезы в GB/T 5668-2017 Роторная фреза, ножевой каток роторной фрезы работал на трех различных скоростях вращения — 240, 270 и 300 об/мин — для оценки их влияния на скорость возврата соломы. При обработке почвы глубина обработки регулировалась с помощью трёхточечной навески трактора и устанавливалась на 5, 10 и 15 см. Количественная оценка скорости возврата соломы проводилась на основе сравнительного анализа качества соломы на уровне почвы до и после ротационной обработки. Таким образом, с помощью программного обеспечения Design-Expert 13.0 при разработке плана эксперимента был использован подход Бокса–Бенкена. Применение плана Бокса–Бенкена позволило выявить все аспекты выбранных методов обработки почвы, наиболее эффективно влияющие на заделку соломы, а также взаимодействие между ними. В таблице 3 представлен список изученных в исследовании переменных и уровни, соответствующие переменным.
2.6 Анализ данных
Результаты эксперимента были статистически проанализированы с использованием однофакторного дисперсионного анализа (ANOVA) первого эксперимента Microsoft Excel. Средние значения обработки, которые продемонстрировали статистическую значимость на уровне вероятности p = 0,05, как показал F-тест, были разделены с использованием теста наименьшей значимой разницы (LSD = 0,05). Статистические данные второго эксперимента были исследованы с помощью Design Expert, программного обеспечения для статистического моделирования (версия 13.0) от Stat Ease Inc., Миннеаполис, Миннесота, США. F-значение показывает, какая часть среднего квадрата относится к регрессии от среднего квадрата, возникшей из-за фактической ошибки. Что касается скорости разрушения почвы, скорости возврата соломы и ровности почвы, это программное обеспечение оценивает отсутствие важности приспособленности как независимых переменных, так и линейных и перекрестных продуктов влияния зависимостей.
3. Результаты и обсуждение
3.1. Влияние нарушения почвенной бороздки, измеренное с помощью методов профилометрии после обработки почвы.
Метод профилометрии позволил количественно оценить степень нарушения почвы, создав трёхмерное изображение поверхности почвы после обработки. Самая глубокая часть бороздки определяется наибольшим вертикальным расстоянием от её дна до поверхности почвы, как в полевых условиях, так и в Microsoft Excel, что представлено в таблице 4 .
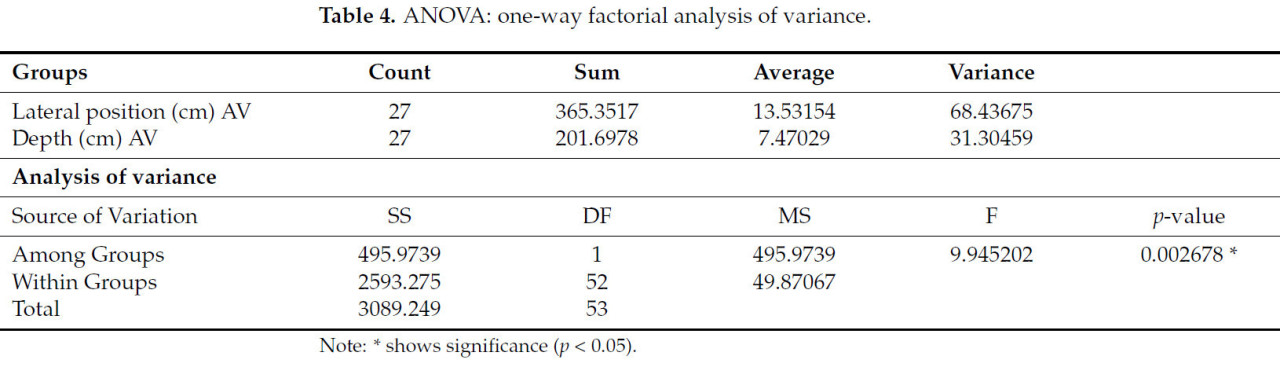
Таблица 4. ANOVA: однофакторный факторный дисперсионный анализ.
Значение p < 0,05 указывает на значительные вариации средних значений латерального и глубинного положения, влияющие на нарушение почвы при различных способах обработки. Методы профилометрии включали графические профили и усредненные показания, при этом возмущение в режиме DRTS было значительно большим, в режиме SRTS – умеренным, а в режиме NTSR – незначительным. Схема профилометра, используемого для определения глубины и горизонтального положения участка почвы, затронутого различными методами обработки, представлена на рисунке 4a . В профилометре вертикальные стержни регистрируют рельеф поверхности почвы после обработки, что важно для определения смещения почвы. Профиль почвы, показанный на рисунке 4b , был получен с использованием режима SRTS, который показывает глубину почвы после обработки с постоянством дисперсии, как это происходит в зависимости от положения культиватора в боковой плоскости. Более подробно, на рисунке 4c показано распределение NRSR методов обработки относительно влияния распределения глубины обработки и бокового смещения почвы. На основании рисунка 4 г видно, что система глубокой обработки почвы приводит к более улучшенному и глубокому ее проработке, чем другие методы, представленные на графике глубины.
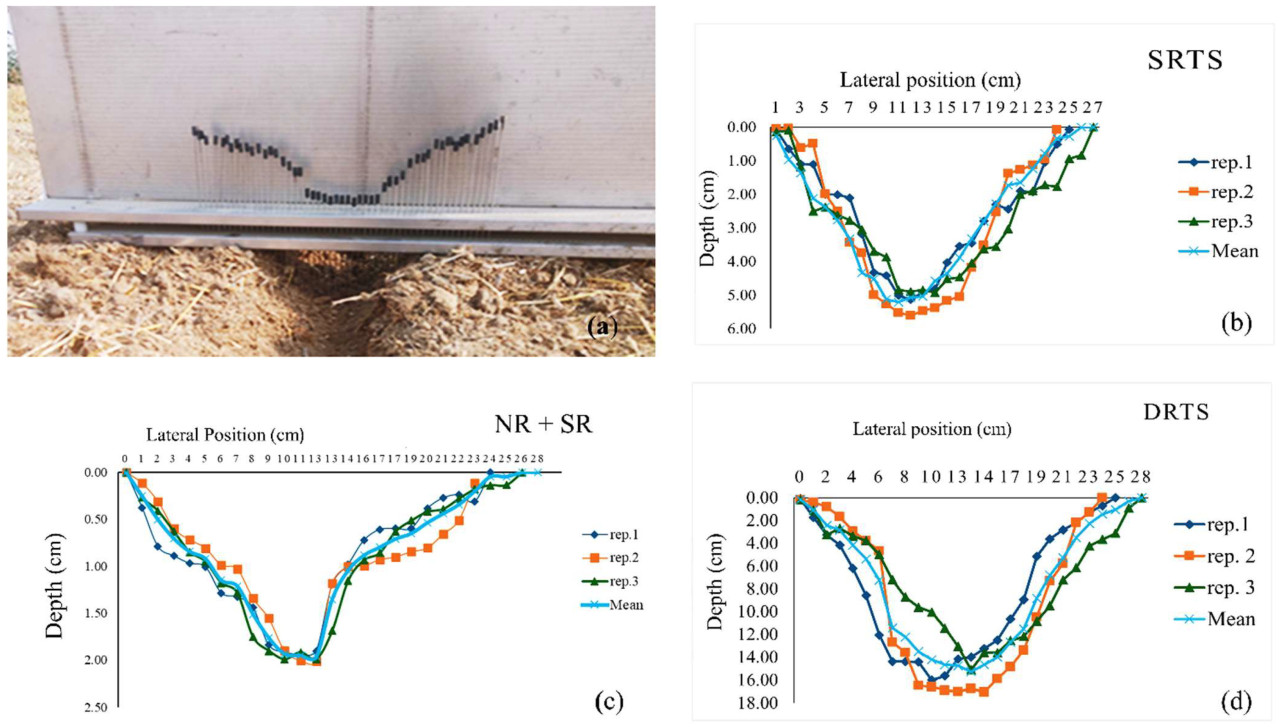
Рисунок 4. Профилометр индекса нарушения почвы: ( а ) Профилометр палочек; ( б ) SRTS; ( в ) NTSR; (г) DRTS; визуальное представление полученного профиля и средних показаний соответственно.
Графические изображения и усредненные значения показывают, насколько существенно способы обработки почвы влияют на её профиль. Таким образом, оценивая эти профили, можно определить, какой способ обработки почвы наиболее эффективно оказывает необходимое воздействие на почву, что важно для оптимизации сельскохозяйственных работ и улучшения её состояния.
3.2 Влияние отдельных факторов на скорость возврата соломы
На рисунке 5 представлен анализ влияния трёх факторов (глубины обработки, скорости движения и скорости вращения) на скорость возврата соломы. Результаты показывают, что существует корреляция между скоростью движения и скоростью возврата соломы при скорости 3,06 км/ч, что показано на рисунке 5a . Однако она увеличилась до 5,4 км/ч, что привело к небольшому отрицательному значению, которое указывает на оптимальную скорость движения, при которой может быть возвращено максимальное количество соломы. При увеличении скорости вращения роторного ножа с 240 об/мин до 270 об/мин, как показано на рисунке 5b , было отмечено, что скорость возврата соломы увеличивается в первую очередь при более интенсивном перемешивании почвы и пожнивных остатков. Однако с реалистичной точки зрения это предсказывает, что скорость возврата начинает уменьшаться; следовательно, любое увеличение скорости свыше 300 об/мин не даст существенного результата. По мере увеличения глубины обработки, используемой для возврата соломы, скорость возврата соломы, представленная на рисунке 5c, также увеличивается, достигая 90%, и достигает 95% при длине 10–15 см. Это увеличение, возможно, является результатом увеличения корневой массы и количества остатков соломы в почве. Рисунок 5 d показывает, что более высокие скорости и более глубокая обработка почвы увеличивают количество заделывания соломы. Это также иллюстрирует, что скорость возврата соломы, соответствующая скорости вращения ротора, увеличивается на небольшой глубине (0–5 см), средней глубине (5–10 см) и на больших глубинах (10–15 см). Соответственно, результаты, полученные в ходе однофакторных испытаний, показывают, что глубина обработки и скорость вращения ротора значительно влияют на скорость возврата соломы, а более глубокая обработка почвы и умеренно высокая или высокая скорость вращения дали лучшие результаты. Совместное действие этих факторов означает, что улучшение обоих параметров может улучшить заделывание соломы, что имеет первостепенное значение для здоровья почвы и урожайности культур.
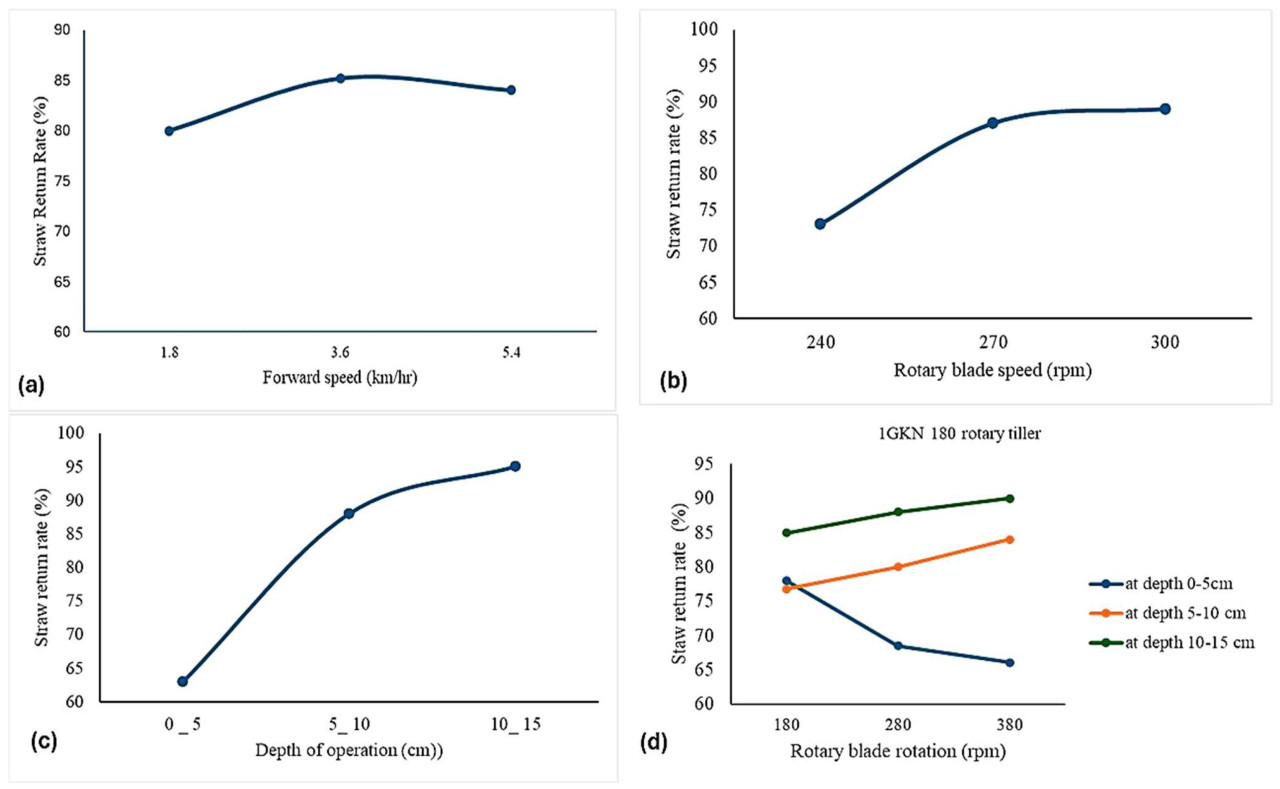
Рисунок 5. Влияние отдельных факторов на скорость возврата соломы: ( a ) скорость движения в зависимости от скорости возврата соломы; ( b ) скорость вращения в зависимости от скорости возврата соломы; ( c ) глубина обработки в зависимости от скорости возврата соломы; и ( d ) сочетание скорости вращения роторного ножа и глубины обработки в зависимости от скорости возврата соломы.
3.3 Оптимизация эксплуатационных параметров с использованием конструкции Бокса-Бенкена
3.3.1 Экспериментальные результаты
Система испытаний на оптимизацию параметров обработки почвы была разработана с использованием трёхфакторных трёхуровневых испытаний на поверхности отклика Бокса-Бехенкена. В таблице 5 представлен конкретный план испытаний, а также полученные результаты испытаний.
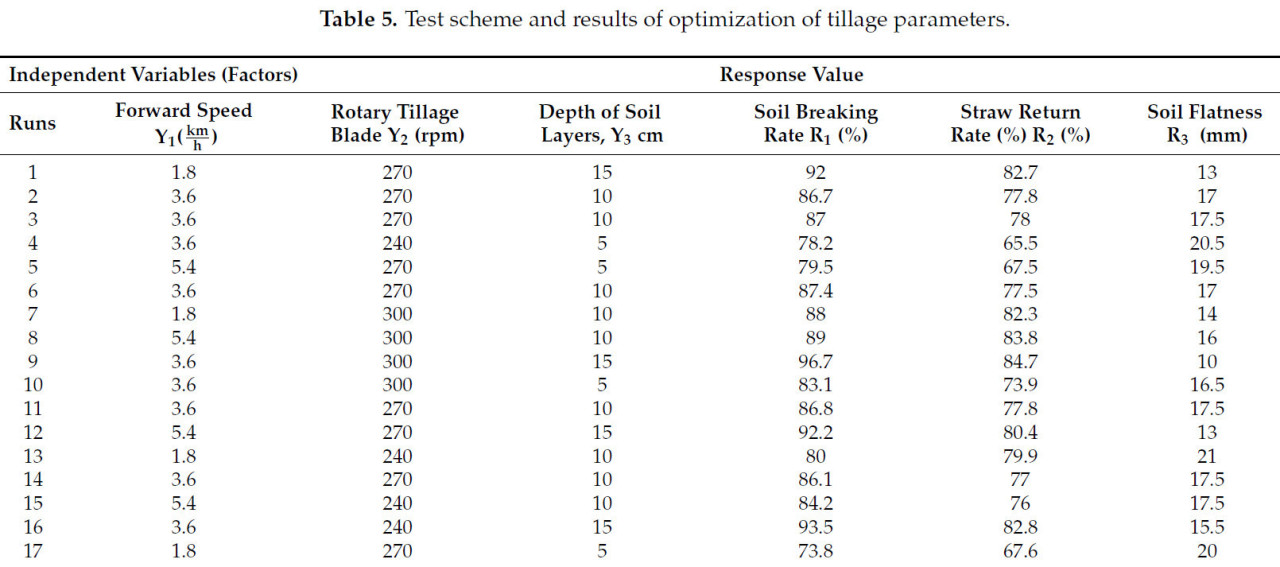
Таблица 5. Схема опыта и результаты оптимизации параметров обработки почвы.
Результаты испытаний, представленные в таблице 5, были проанализированы с помощью Design Expert 13.0, что включало в себя генерацию уравнений регрессии, ANOVA, создание диаграмм поверхности отклика, анализ взаимодействия факторов влияния и определение оптимальной комбинации параметров.
3.3.2 Построение уравнения регрессии
Уравнение регрессии, устанавливающее взаимосвязь между показателями и компонентами теста, было разработано с использованием множественного регрессионного анализа собранных данных. Это уравнение представлено в виде уравнения (7). Вышеприведенное достижение демонстрирует выдающуюся прогностическую способность, достигаемую при сопоставлении реальных и прогнозируемых значений оптимизированных параметров обработки почвы. Эффективность этой модели может сделать ее весьма ценным инструментом для оптимизации сельского хозяйства благодаря ее способности с высокой точностью прогнозировать такие критические параметры, как скорость разрушения почвы, скорость возврата соломы и ровность почвы. Дополнительным показателем является то, что такие экстраполяции находятся в четко определенных пределах контроля для широкого диапазона настроек параметров, что свидетельствует о стабильности и надежности процесса оптимизации.
В конечном счёте, как реальные полевые измерения, так и их прогнозы относительно оптимизированных операций обработки почвы связаны уравнением модели (7). Этот факт подчёркивает значительную практическую ценность модели во множестве агрономических приложений, доказывая её эффективность в совершенствовании агротехники и повышении урожайности за счёт усовершенствованных методов обработки почвы.
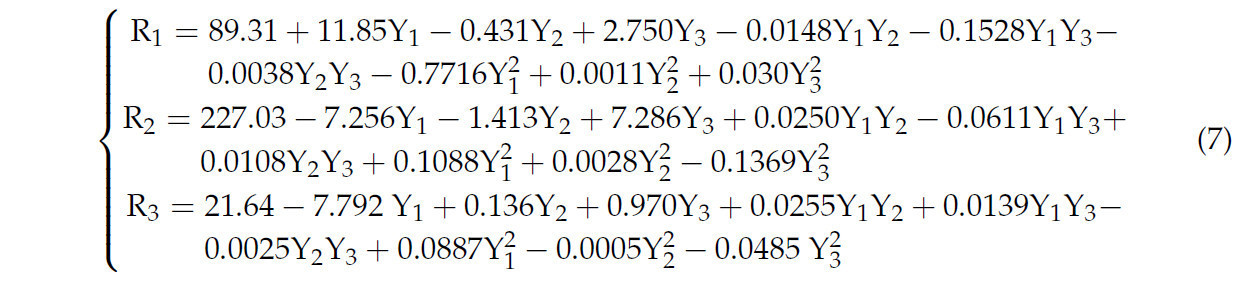
где R 1 — скорость измельчения почвы (%); R 2 — скорость возврата соломы (мм); R 3 — ровность почвы, мм; Y 1 — скорость движения (км/ч); Y 2 — скорость вращения лезвия (об/мин); Y 3 — глубина почвы (см).
Сравнение фактических и прогнозируемых значений оптимальных параметров обработки почвы демонстрирует выдающуюся предсказательную способность. Модель позволяет точно прогнозировать скорость рыхления почвы, скорость возврата соломы и ровность почвы, что делает её важным инструментом для оптимизации сельского хозяйства.
3.3.3 Анализ модели скорости поломки
Первичный и вторичный порядок влияния многочисленных факторов на скорость разрушения почвы, а также соответствующая точность модели были определены путем анализа данных о скорости разрушения почвы с помощью троичной квадратичной регрессии и дисперсионного анализа.
Таблица 6 демонстрирует существенную разницу между регрессионными моделями (F = 82,8, p < 0,0001). Скорректированные значения составляют 0,9787 и 0,9902. Более того, тест на несоответствие дал F = 1,48, p > 0,1, что указывает на незначимость результата. Таблица 6 показывает, что модель оказала наибольшее влияние на ключевые компоненты индекса скорости разрушения почвы. Y 3 значительно повлиял на скорость растрескивания почвы ( p < 0,05). Существует три основных и вторичных фактора, коррелирующих со скоростью разрушения почвы, которые обозначены как Y 3 > Y 2 > Y 1 .
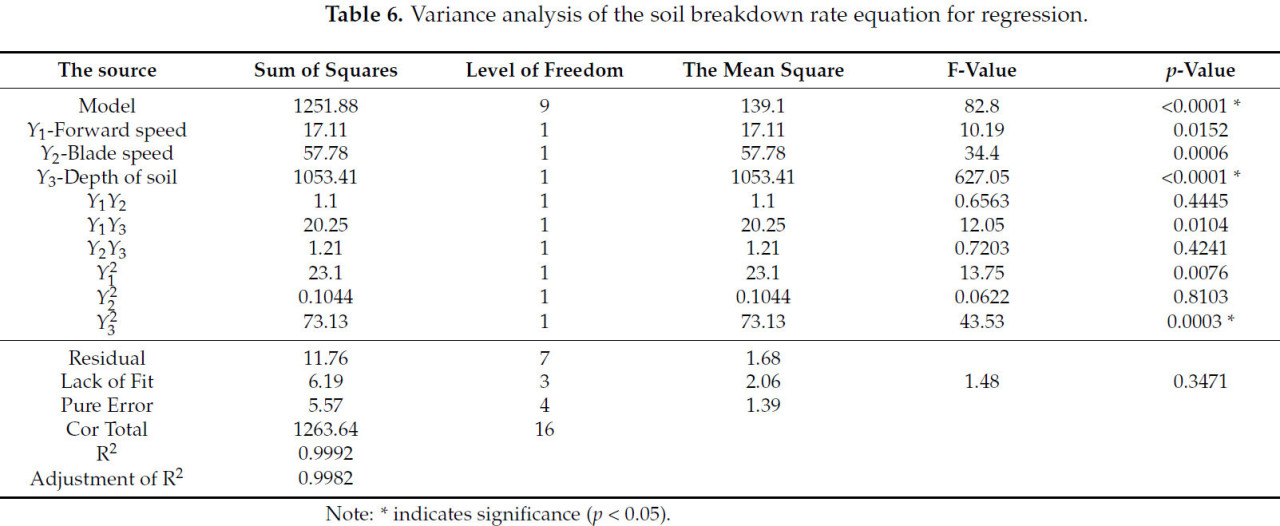
Таблица 6. Дисперсионный анализ уравнения скорости разложения почвы для регрессии.
Мы провели анализ поверхности отклика на основе регрессионной модели, чтобы исследовать эффекты взаимодействия ключевых влияющих факторов на показатель оценки R1 . Уравнение квадратичного полиномиального регрессии было сокращено путем фиксации одного фактора на его нулевом уровне, чтобы изолировать и проанализировать эффекты взаимодействия двух других факторов, исключив незначимые члены. Эффекты Y1 и Y2 на R1 показаны на рисунке 6b , где поверхность отклика демонстрирует взаимодействие нелинейного характера с оптимальным диапазоном для более высоких скоростей разрушения почвы. Рисунок 6c также охватывает взаимодействие факторов Y1 и Y3 на R1 в целом, указывая на то, что большая глубина проникновения в почву и умеренная скорость движения дают хорошие показатели в производительности разрушения почвы. Наконец, рисунок 6d подразумевает взаимодействие между двумя другими, Y2 и Y3 , и показывает, что высокие скорости ножа и меньшая глубина почвы существенно влияют на скорость разрушения почвы. Эти поверхности отклика подчеркивают, что тонкая настройка между этими параметрами имеет высокие ставки для эффективного разрушения почвы.
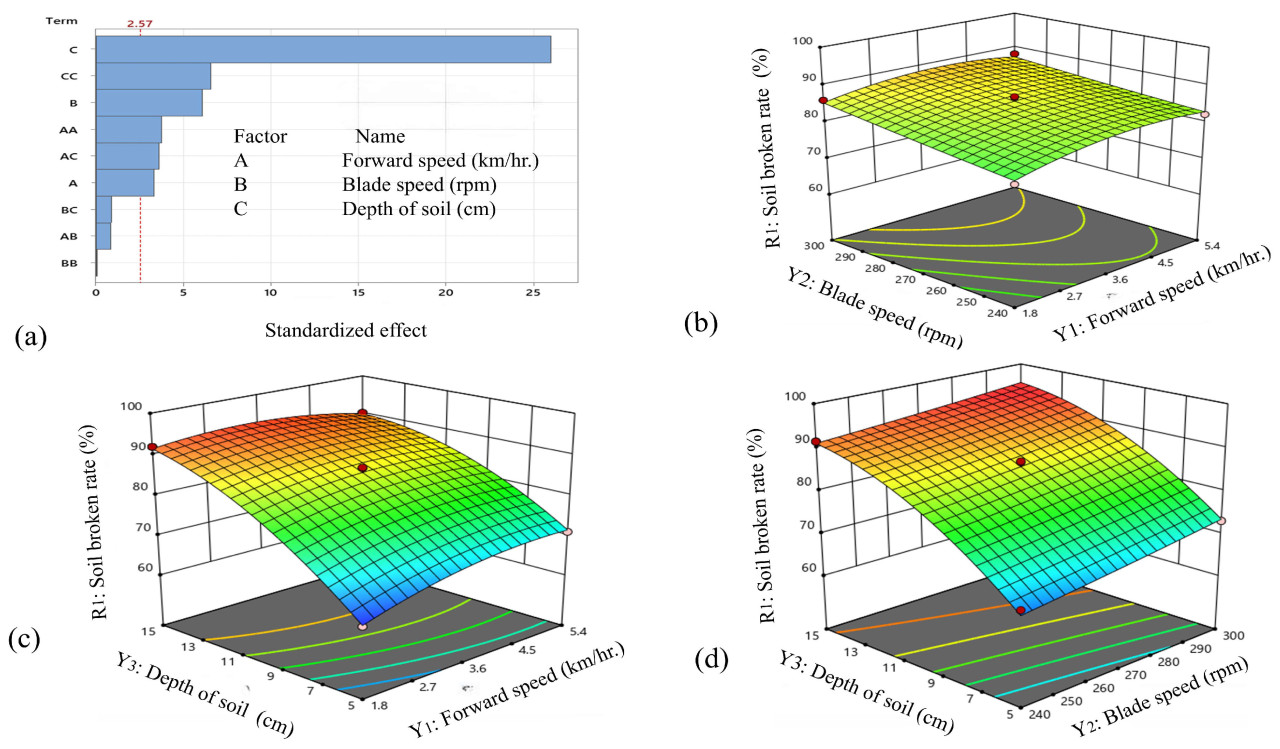
Рисунок 6. Демонстрирует реакцию поверхности на факторы, влияющие на скорость разрушения почвы: ( a ) Диаграмма Парето отображает стандартизированное влияние различных переменных на разрушение почвы; ( b ) Этот график показывает, как скорость разрушения почвы изменяется в зависимости от скорости движения и скорости лезвия; ( c ) Этот график отображает комбинированное влияние скорости движения и глубины почвы на скорость возврата соломы; и ( d ) Этот график показывает взаимодействие между скоростью лезвия и глубиной почвы.
3.3.4 Анализ модели скорости возврата соломы
Для оценки точности данной модели и изучения эффектов первого и второго порядка различных параметров на скорость возврата соломы использовались дисперсионный анализ и троичная квадратичная регрессия.
В Таблице 7 показаны скорректированные значения 0,9902 и 0,9787, со значительной разницей между регрессионными моделями (F = 1025,39, p < 0,0001). Более того, тест на несоответствие дал незначимый результат (F = 0,8153, p > 0,1). Модель с наибольшим влиянием на индекс возврата соломы в критическом элементе представлена в Таблице 7. Это оказало значительное влияние на возврат соломы ( p < 0,05). Возврат соломы коррелировал с тремя основными и вторичными атрибутами: Y 3 > Y 2 > Y 1 .
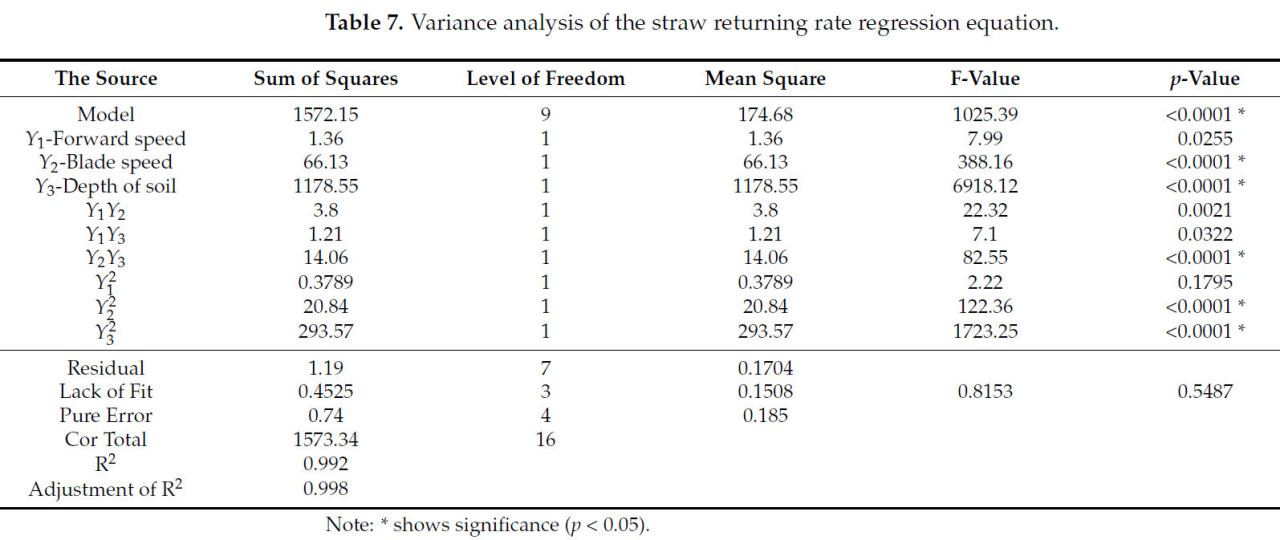
Таблица 7. Анализ дисперсии уравнения регрессии скорости возврата соломы.
Анализ поверхности отклика использовался для исследования эффектов взаимодействия факторов, влияющих на скорость возврата соломы, при этом один фактор был установлен на ноль и незначимые члены были исключены. Диаграмма Парето в левом верхнем углу показывает, что глубина почвы оказывает наибольшее влияние на скорость возврата соломы, скорость разрушения почвы и скорость движения за короткий период, в которой наложение средней скорости ножа с оптимальной скоростью движения обеспечивает самую высокую отдачу, что показано на рисунке 7b , который показывает практику возврата соломы как влияние на Y1 и Y3 . Рисунок 7c выбирает меньшую глубину почвы с не слишком высокой скоростью движения в качестве оптимальной для возврата соломы. Рисунок 7d поясняет взаимное действие Y3 и Y2 , утверждая, что более высокие скорости движения почвы в сочетании с умеренной глубиной повышают эффективность возврата соломы. Они подчеркивают важное требование точной оптимизации параметров для обеспечения хорошей производительности возврата соломы.
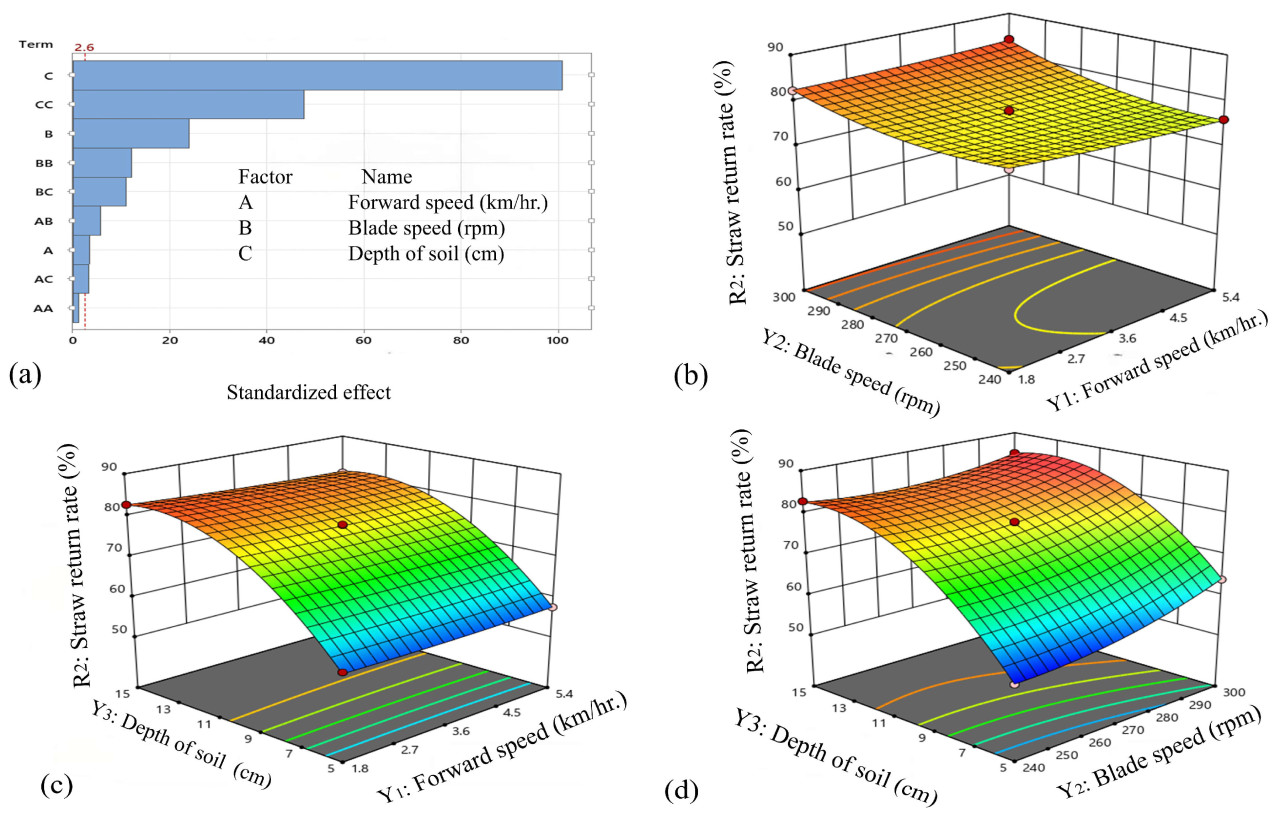
Рисунок 7. Демонстрирует влияние рабочих параметров обработки почвы на возврат соломы: ( a ) Диаграмма Парето отображает стандартизированное влияние различных факторов на скорость возврата соломы; ( b ) Этот график показывает, как изменяется скорость возврата соломы при изменении скорости движения и скорости ножа; ( c ) Этот график отображает совместное влияние скорости движения и глубины почвы на скорость возврата соломы; и ( d ) Этот график отображает взаимодействие между скоростью движения ножа и глубиной почвы.
3.3.5 Анализ модели ровности почвы
Чтобы установить надлежащую точность модели, а также первичный и вторичный порядок влияния различных факторов на ровность почвы, для записей ровности почвы использовались дисперсионный анализ и тернарный квадратичный регрессионный анализ. Таблица 8 показывает, что скорректированные значения составляют 0,998 и 0,996 соответственно. Кроме того, тест важности модели показывает значительную разницу между регрессионными моделями (F = 507,42, p < 0,0001). Кроме того, F = 0,0134, p > 0,1 в тесте на несоответствие указывает на незначимость. Таблица 8 показывает, что модель оказала наибольшее влияние на индекс ровности почвы основного элемента. Y 2 , Y 3 , Y 2 и Y 3 оказали статистически значимое ( p < 0,05) влияние на ровность почвы. Три характеристики имели основную и вторичную связь с ровностью почвы: Y 2 > Y 3 > Y 1 .
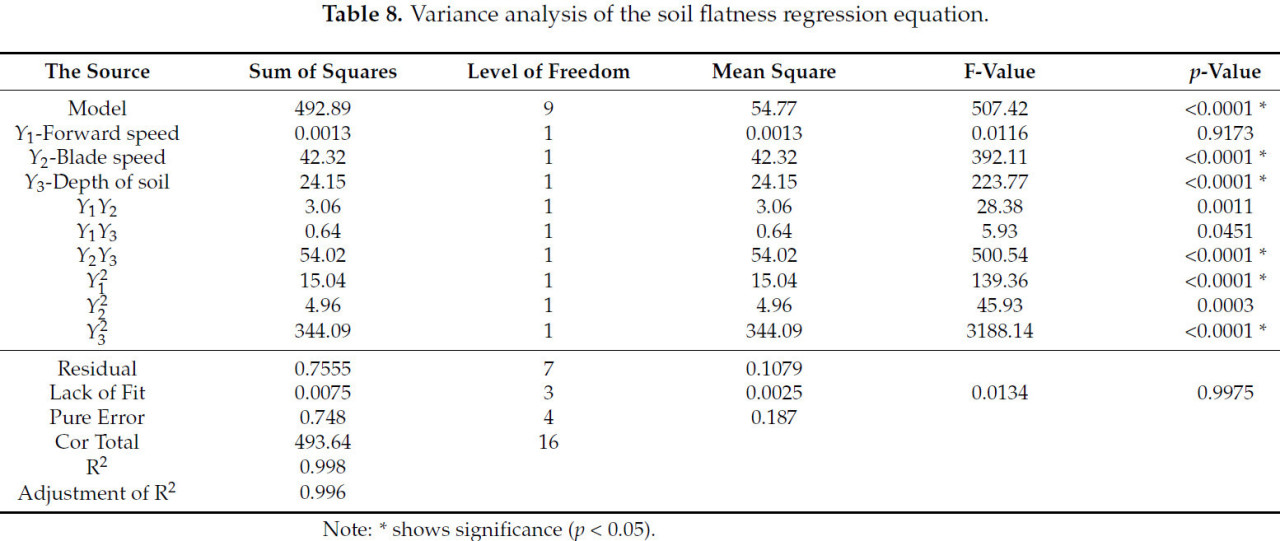
Таблица 8. Дисперсионный анализ уравнения регрессии ровности почвы.
Анализ поверхности отклика был проведен для изучения влияния важных факторов на ровность почвы с упором на значительный интерфейс между скоростью движения Y 1 , Y 2 и Y 3 в ответе. Y 3 является наиболее влиятельным фактором ровности почвы на рисунке 8a с точки зрения стандартизированных эффектов сельскохозяйственных переменных, Y 3 , за которыми следуют Y 2 и Y 1 . Рисунок 8b показывает взаимодействие между Y 1 и Y 2 ; чем ниже объединены две переменные, тем более гладкой становится поверхность обработки. Рисунок 8c представляет собой суперпозицию Y 1 и Y 3 , где показано, что более низкая скорость движения на большей глубине почвы связана с более высокой ровностью почвы. Наконец, рисунок 8d иллюстрирует взаимодействие между Y 3 и Y 2 , и данные говорят о том, что более высокие скорости ножей и большая глубина почвы в лучшем случае встречаются в ровных задачах для производительности выравнивания почвы. Результаты подчеркивают необходимость тонкой настройки этих факторов для улучшения результатов выравнивания почвы.
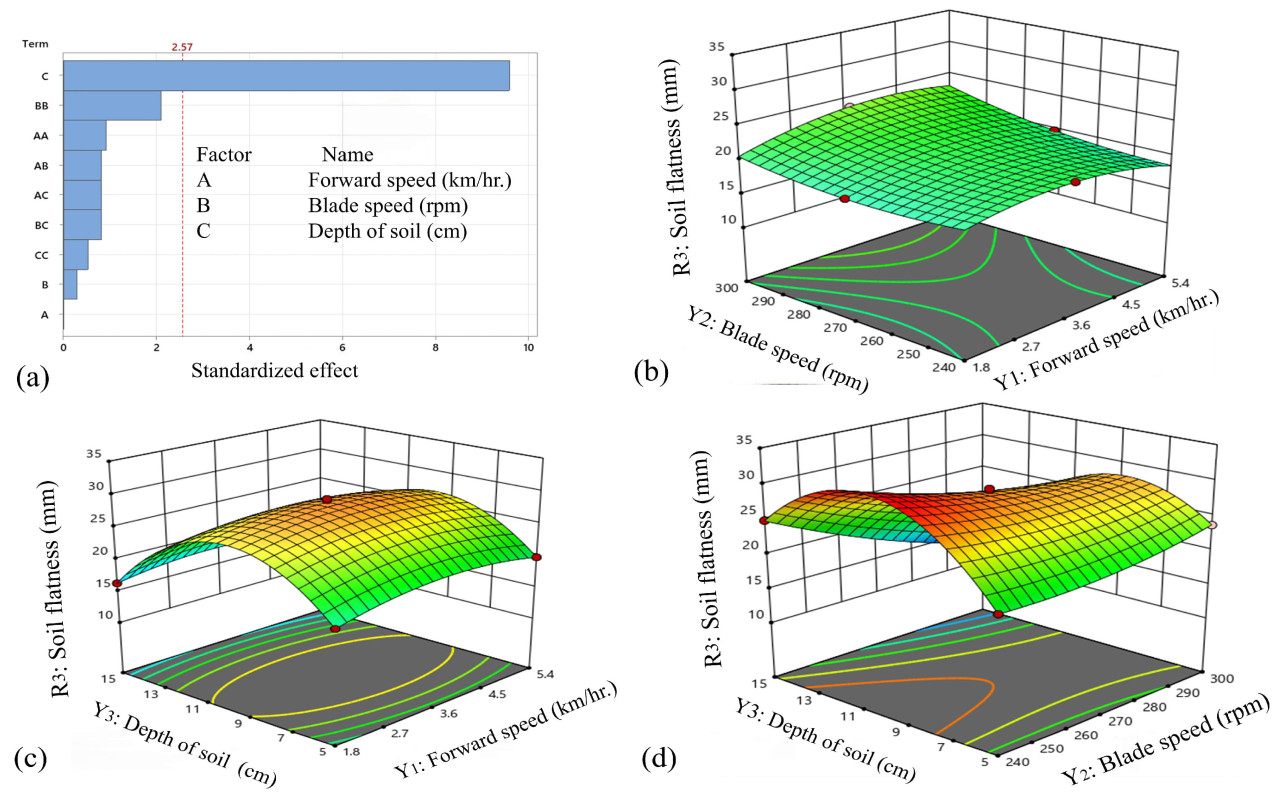
Рисунок 8. Показывает, как параметры обработки почвы влияют на ровность почвы: ( a ) Диаграмма Парето отображает стандартизированное влияние различных факторов на ровность почвы. ( b ) Этот график показывает, как ровность почвы меняется в зависимости от изменения скорости движения и скорости ножа. ( c ) Этот график показывает, как скорость движения и глубина почвы совместно влияют на скорость возврата соломы. ( d ) Этот график показывает, как взаимодействуют скорость движения и глубина почвы.
3.3.6.Желательность
Таким образом, целью эксперимента было определение оптимальной глубины обработки почвы, скорости вращения ножа и скорости движения вперед для заделки пожнивных остатков в почву с использованием трактора TG-500 и роторной фрезы Qingxuan 1GKN-180. Также было отмечено, что низкие скорости движения вперед и высокие скорости вращения ножа были желательны для достижения максимальной эффективности, как видно из графиков желательности. С помощью графиков поверхности отклика видно, что низкая скорость движения вперед, большая скорость вращения ножа и малая глубина обработки дали наибольшее значение заделки соломы. Опять же, графики желательности указывают на иллюстрацию того, как различные рабочие параметры влияют на эффективность плавной заделки в конечном итоге. Из рисунка 9 а видно, что низкие скорости движения вперед и высокие скорости вращения ножа приводят к наибольшему значению желательности, что указывает на наилучшую заделку соломы. На рисунке 9b показано, что приемлемые поправки достигаются при низких скоростях движения и малой глубине обработки, что соответственно ниже желаемой производительности орудия при высокой скорости движения и глубокой обработке. Эти выводы подтверждаются рисунком 9c , на котором показано, что желаемая производительность снижается с увеличением глубины обработки почвы и достигает максимума при высоких скоростях вращения ножей и малой глубине обработки.
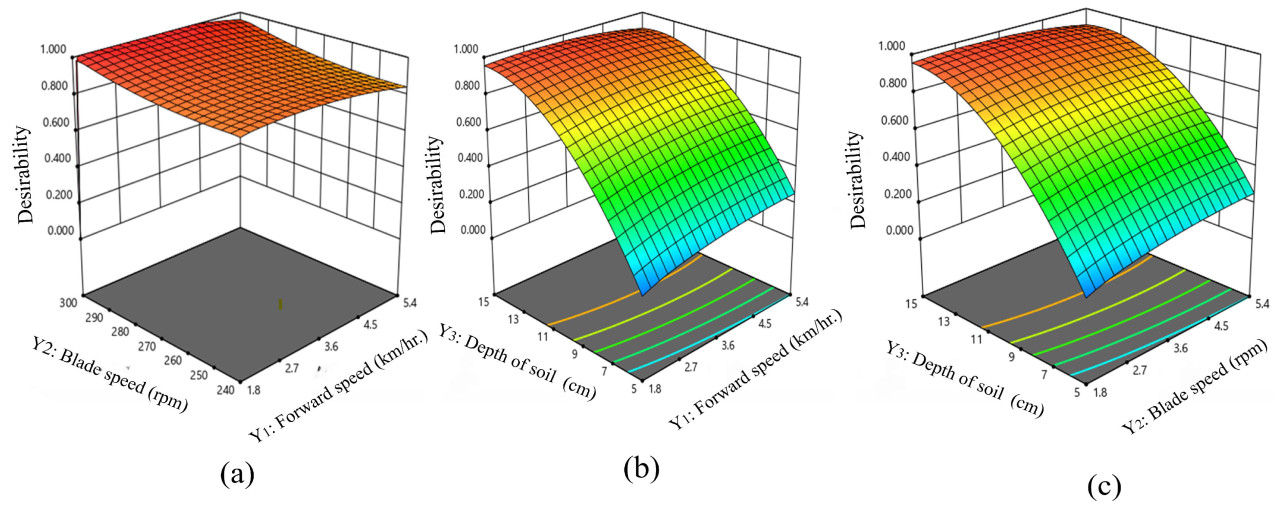
Рисунок 9. График желательности: ( a ) показывает, что низкие скорости движения и высокие скорости лезвия приводят к наибольшей желательности; ( b ) указывает, что желательность уменьшается с увеличением скорости движения и глубины почвы, при этом низкие скорости движения и малая глубина дают наилучшие результаты; и ( c ) показывает, что с увеличением глубины почвы желательность уменьшается от своего пика при высоких скоростях движения лезвия и малой глубине почвы.
3.4. Оптимизация параметров и проверка модели
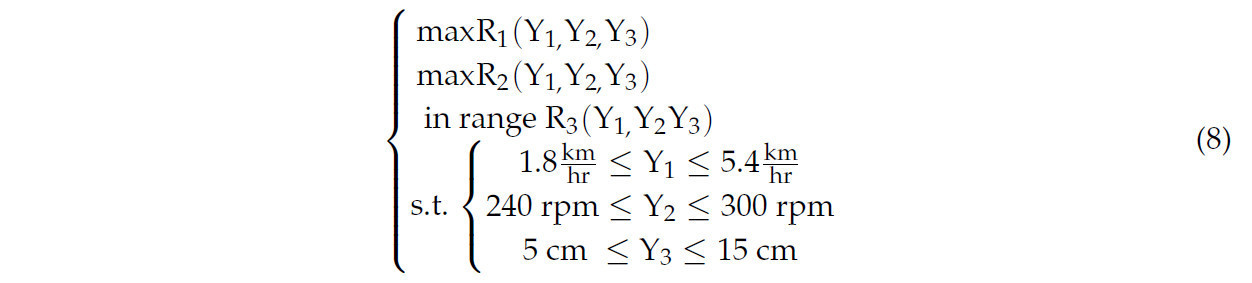
Полиномиальная модель второй последовательности использовалась для повышения качества заделки соломы путём корректировки параметров обработки почвы роторной бороны Qingxuan 1GKN-180 с целью повышения общей производительности, включая максимизацию скорости возврата соломы, максимального разрыхления почвы и уровня выравнивания поверхности в пределах нормы. Основной целью данной оптимизации является увеличение количества соломы, вносимой в поле севооборота рис-пшеница (РП). Регрессионная модель была решена с помощью модуля оптимизации программиста Design-Expert 13.0, и следующие предполагаемые результаты были математически сформулированы.
Оптимальный набор конструктивных решений был разработан с использованием метода оптимизации со скоростью движения 3,23 км/ч. Рабочая глубина роторных катков-ножей почвообрабатывающей машины составляла 14,23 см при частоте вращения 297,6 об/мин. После корректировки параметров обработки для приближения к идеальному решению были проведены три дополнительных испытания для проверки точности оптимизированных параметров. В частности, максимальная скорость движения, использованная в ходе испытания роторной обработки для заделки соломы, составляла 3,23 км/ч. Роторный нож работал на глубине 14,23 см при частоте вращения 297,6 об/мин. Результаты проверочных испытаний показали, что средняя скорость разрыхления почвы составила 94,76%, скорость покрытия соломой – 84,97%, а ровность почвы – 16,36 мм при оптимальных рабочих настройках, определенных программным обеспечением. Данная модель считалась достоверной, когда относительная погрешность между значением теста и значением оптимизации модели составляла 5%. Ошибки регрессионной модели, составляющие 5,57%, 0,74% и 0,748%, демонстрируют точность протестированной модели оптимизации параметров. Математическая модель, связывающая параметры обработки почвы с управлением соломой, крайне важна для оптимизации параметров обработки и полевых данных, определяющих параметры обработки почвы.
3.5 Обсуждение
Результаты данного исследования способствуют улучшению характеристик обработки почвы, что способствует более эффективному использованию соломы в системах возделывания риса и пшеницы. Методы профилометрии с использованием стержней обеспечили достаточное количество информации о поверхностных свойствах почвы после обработки, что позволило провести адекватную оценку степени нарушения почвы. Соответствующие графические иллюстрации также показали, что режим DRTS был наиболее возмущенным, режим SRTS – умеренно возмущенным, а режим NTSR – наименее возмущенным. Установка определяла глубину и боковое расстояние, на которое воздействовали орудия, что показывало, как различные орудия для обработки почвы влияли на уровень нарушения почвы. Глубокая обработка почвы вносила наибольшие изменения в почву. Понимание этих профилей крайне важно для повышения производительности сельского хозяйства, а также для улучшения состояния почвы.
Используя BBD и RSM, мы определили и подтвердили оптимальные настройки для трёх критических факторов: скорости движения, скорости вращения ножа и рабочей глубины. Оптимальные параметры включают скорость движения 3,23 км/ч, скорость вращения роторного ножа 297,6 об/мин и рабочую глубину 14,23 см, что приводит к значительному повышению качества обработки. Проверочные испытания показали высокую степень разрыхления почвы – 94,76%, впечатляющую скорость возврата соломы – 84,97% и отклонение плоскостности почвы в пределах диапазона – 16,36 мм. Это показывает, что оптимизированные результаты хорошо согласуются с фактическими, имея относительную погрешность менее 5%, что подтверждает надёжность разработанной модели оптимизации. Повышение значений некоторых параметров в системе рис-пшеница с внесением соломы приводит к улучшению состояния почвы и созданию экологически чистых систем. В рассматриваемой статье также рассматривается необходимость учета соломы и параметров обработки почвы для поддержания здоровья системы рис-пшеница и повышения урожайности. На основании данного исследования выявлено, что имеются доказательства эффективности заделки соломы при использовании роторной фрезы Qingxuan 1GKN-180 с некоторыми изменениями в эксплуатации. Исследователи также подтвердили это, применив математическую модель. Средние относительные ошибки в исследовании составили менее 0,05, что свидетельствует об обобщении исследования. Однако, несмотря на то, что в статье изложен систематический подход к повышению производительности почвообрабатывающих орудий, необходимы дополнительные подтверждения.
4. Выводы
В настоящем исследовании использовался стержневой профилометр, который является одним из наиболее удобных приборов для изучения профиля почвы. Важно отметить, что методы обработки почвы в различной степени разрушают почву, тем самым оказывая различное влияние на ее профиль. Таким образом, для определения условий максимальных значений скорости расщепления почвы, ровности почвы и хорошего возврата соломы был использован план Бокса-Бенкена с помощью RSM. Применение регрессионного моделирования и дисперсионного анализа (ANOVA) показало, что важные компоненты и их взаимодействие были признаны значимыми для указанной структуры оптимизации обработки почвы. В ходе испытаний, проведенных на роторной почвообрабатывающей машине Qingxuan 1GKN-180, было отмечено, что управление рабочими параметрами способствовало значительному повышению качества обработки. Строгий алгоритм максимальной оптимизации определил следующие оптимальные параметры: скорость движения 3,23 км/ч, скорость вращения роторного ножа 297,6 мин −1 и глубина обработки 14,23 см. Среднее проверенное значение скорости разрыхления почвы составило 94,76%, возврата соломы – 84,97%, а отклонение поверхности почвы в среднем составило 16,36 мм. Таким образом, можно сделать вывод о высокой значимости модельной зависимости, поскольку погрешность не превышала 5% относительно прогнозов модели. Этот фактор играет важную роль в качестве эксплуатационного состояния при корректировке параметров вспашки, поскольку он влияет на конкретные показатели вспашки во время полевых работ.
Таким образом, будущие исследования должны быть направлены на оценку устойчивого воздействия диверсифицированных методов обработки почвы в разных регионах на показатели здоровья почвы, чтобы можно было определить управление соломой на рисово-пшеничных полях таким образом, чтобы ускорить мобилизацию питательных веществ и одновременно свести к минимуму выбросы парниковых газов.
Ссылки
1. Akwakwa, G.H.; Xiaoyan, W. Impact of Rice–Wheat Straw Incorporation and Varying Nitrogen Fertilizer Rates on Soil Physicochemical Properties and Wheat Grain Yield. Agronomy 2023, 13, 2363. [Google Scholar] [CrossRef]
2. Lacroix, C.; Vandenberghe, C.; Monty, A.; Dumont, B. Effect of long-term tillage and residue management on weed flora and its impact on winter wheat development. Agric. Ecosyst. Environ. 2024, 366, 108937. [Google Scholar] [CrossRef]
3. Aikins, K.A.; Barr, J.B.; Antille, D.L.; Ucgul, M.; Jensen, T.A.; Desbiolles, J.M. Analysis of the effect of bent leg opener geometry on performance in cohesive soil using the discrete element method. Biosyst. Eng. 2021, 209, 106–124. [Google Scholar] [CrossRef]
4. Bhatt, R.; Singh, P.; Hossain, A.; Timsina, J. Rice–wheat system in the northwest Indo-Gangetic plains of South Asia: Issues and technological interventions for increasing productivity and sustainability. Paddy Water Environ. 2021, 19, 345–365. [Google Scholar] [CrossRef]
5. Mu, G.; Wang, W.; Zhang, T.; Hu, L.; Zheng, W.; Zhang, W. Design and Experiment with a Double-Roller Sweet Potato Vine Harvester. Agriculture 2022, 12, 1559. [Google Scholar] [CrossRef]
6. Conte, O.; Levien, R.; Debiasi, H.; Stürmer, S.L.; Mazurana, M.; Müller, J. Soil disturbance index as an indicator of seed drill efficiency in no-tillage agrosystems. Soil Tillage Res. 2011, 114, 37–42. [Google Scholar] [CrossRef]
7. Xu, G.; Xie, Y.; Liang, L.; Ding, Q.; Xie, H.; Wang, J. Straw-Soil-Rotary Blade Interaction: Interactive Effects of Multiple Operation Parameters on the Straw Movement. Agronomy 2022, 12, 847. [Google Scholar] [CrossRef]
8. Fang, H.; Zhang, Q.; Chandio, F.A.; Guo, J.; Sattar, A.; Arslan, C.; Ji, C. Effect of straw length and rotavator kinematic parameter on soil and straw movement by a rotary blade. Eng. Agric. Environ. Food 2016, 9, 235–241. [Google Scholar] [CrossRef]
9. Gupta, R.K.; Sraw, P.K.; Kang, J.S.; Kaur, J.; Sharma, V.; Pathania, N.; Kalia, A.; Al-Ansari, N.; Alataway, A.; Dewidar, A.Z.; et al. Interactive effects of long-term management of crop residue and phosphorus fertilization on wheat productivity and soil health in the rice-wheat. Sci. Rep. 2024, 14, 1399. [Google Scholar] [CrossRef]
10. Tahmasebi, M.; Gohari, M.; Sharifi Malvajerdi, A.; Hedayatipour, A. Development and Field Evaluation of a Variable-Depth Tillage Tool Based on a Horizontal Pneumatic Sensor Measurement. J. Agric. Mach. 2023, 13, 85. [Google Scholar] [CrossRef]
11. Nawaz, A.; Farooq, M.; Nadeem, F.; Siddique, K.H.; Lal, R. Rice-wheat cropping systems in South Asia: Issues, options and opportunities. Crop Pasture Sci. 2019, 70, 395–427. [Google Scholar] [CrossRef]
12. Wu, F.; Xu, H.; Gu, F.; Chen, Y.; Shi, L.; Hu, Z. Improvement of straw transport device for straw-smashing back-throwing type multi-function no-tillage planter. Nongye Gongcheng Xuebao/Trans. Chin. Soc. Agric. Eng. 2017, 33, 18–26. [Google Scholar] [CrossRef]
13. Huang, J.; Nie, T.; Li, T.; Chen, P.; Zhang, Z.; Zhu, S.; Sun, Z.; E, L. Effects of Straw Incorporation Years and Water-Saving Irrigation on Greenhouse Gas Emissions from Paddy Fields in Cold Region of Northeast China. Agriculture 2022, 12, 1878. [Google Scholar] [CrossRef]
14. Song, K.; Yang, J.; Xue, Y.; Lv, W.; Zheng, X.; Pan, J. Influence of tillage practices and straw incorporation on soil aggregates, organic carbon, and crop yields in a rice-wheat rotation system. Sci. Rep. 2016, 6, 36602. [Google Scholar] [CrossRef]
15. Sarkar, S.; Skalicky, M.; Hossain, A.; Brestic, M.; Saha, S.; Garai, S.; Ray, K.; Brahmachari, K. Management of crop residues for improving input use efficiency and agricultural sustainability. Sustainability 2020, 12, 9808. [Google Scholar] [CrossRef]
16. Korav, S.; Yadav, D.B.; Yadav, A.; Rajanna, G.A.; Parshad, J.; Tallapragada, S.; Elansary, H.O.; Mahmoud, E.A. Rice residue management alternatives in rice-wheat cropping system: Impact on wheat productivity, soil organic carbon, water, and microbial dynamics. Sci. Rep. 2024, 14, 1822. [Google Scholar] [CrossRef]
17. Memon, M.S.; Guo, J.; Tagar, A.A.; Perveen, N.; Ji, C.; Memon, S.A.; Memon, N. The effects of tillage and straw incorporation on soil organic carbon status, rice crop productivity, and sustainability in the rice-wheat cropping system of Eastern China. Sustainability 2018, 10, 961. [Google Scholar] [CrossRef]
18. Li, Y.E.; Shi, S.; Waqas, M.A.; Zhou, X.; Li, J.; Wan, Y.; Qin, X.; Gao, Q.; Liu, S.; Wilkes, A. Long-term (≥20 years) application of fertilizers and straw return enhances soil carbon storage: A meta-analysis. Mitig. Adapt. Strateg. Glob. Chang. 2018, 23, 603–619. [Google Scholar] [CrossRef]
19. Feiziene, D.; Feiza, V.; Karklins, A.; Versuliene, A.; Janusauskaite, D.; Antanaitis, S. After-effects of long-term tillage and residue management on topsoil state in Boreal conditions. Eur. J. Agron. 2018, 94, 12–24. [Google Scholar] [CrossRef]
20. Wang, Y.; Qin, M.; Zhan, M.; Liu, T.; Yuan, J. Straw return-enhanced soil carbon and nitrogen fractions and nitrogen use efficiency in a maize-rice rotation system. Exp. Agric. 2024, 60, e5. [Google Scholar] [CrossRef]
21. Guo, R.; Li, G.; Pan, M.; Zheng, X.; Wang, Z.; He, G. Effects of Long-Term Straw Return and Nitrogen Application Rate on Organic Carbon Storage, Components and Aggregates in Cultivated Layers. Sci. Agric. Sin. 2023, 56, 4035–4048. [Google Scholar] [CrossRef]
22. Agarry, S.E.; Ogunleye, O.O. Box-Behnken design application to study enhanced bioremediation of soil artificially contaminated with spent engine oil using biostimulation strategy. Int. J. Energy Environ. Eng. 2012, 3, 31. [Google Scholar] [CrossRef]
23. Zhang, X.; Zhang, L.; Hu, X.; Wang, H.; Shi, X.; Ma, X. Simulation of Soil Cutting and Power Consumption Optimization of a Typical Rotary Tillage Soil Blade. Appl. Sci. 2022, 12, 8177. [Google Scholar] [CrossRef]
24. Zhang, J.; Xia, M.; Chen, W.; Yuan, D.; Wu, C.; Zhu, J. Simulation Analysis and Experiments for Blade-Soil-Straw Interaction under Deep Ploughing Based on the Discrete Element Method. Agriculture 2023, 13, 136. [Google Scholar] [CrossRef]
25. Ding, R. Study on measuring system of tillage depth of deep loosening machine. J. Comput. Methods Sci. Eng. 2017, 17, 473–480. [Google Scholar] [CrossRef]
26. Zhu, D.; Shi, M.; Yu, C.; Yu, Z.; Kuang, F.; Xiong, W.; Xue, K. Tool-straw-paddy soil coupling model of mechanical rotary-tillage process based on DEM-FEM. Comput. Electron. Agric. 2023, 215, 108410. [Google Scholar] [CrossRef]
27. Zhang, S.; Jia, X.; Dong, J.; Wang, X.; Zhao, H.; Chen, X.; Zhang, Z.; Huang, Y.; Shi, J. Optimization of operating angles of disc colters for maize residue management using discrete element method. Comput. Electron. Agric. 2024, 218, 108691. [Google Scholar] [CrossRef]
28. Kim, Y.S.; Kim, T.J.; Kim, Y.J.; Lee, S.D.; Park, S.U.; Kim, W.S. Development of a real-time tillage depth measurement system for agricultural tractors: Application to the effect analysis of tillage depth on draft force during plow tillage. Sensors 2020, 20, 912. [Google Scholar] [CrossRef]
29. Latvala, J.; Luomala, H.; Kolisoja, P. Determining soil moisture content and material properties with dynamic cone penetrometer. Balt. J. Road Bridge Eng. 2020, 15, 136–159. [Google Scholar] [CrossRef]
30. Tang, H.; Wang, D.; Zhao, J.; Xu, C.; Wang, J. Mode and experiments of a straw ditch-burying returning and maturing in a cold region of Northeast China. Eur. J. Agron. 2023, 151, 127006. [Google Scholar] [CrossRef]
31. Zhao, H.; Wu, L.; Zhu, S.; Sun, H.; Xu, C.; Fu, J.; Ning, T. Sensitivities of Physical and Chemical Attributes of Soil Quality to Different Tillage Management. Agronomy 2022, 12, 1153. [Google Scholar] [CrossRef]
32. Ehrhardt, A.; Deumlich, D.; Gerke, H.H. Soil Surface Micro-Topography by Structure-from-Motion Photogrammetry for Monitoring Density and Erosion Dynamics. Front. Environ. Sci. 2022, 9, 737702. [Google Scholar] [CrossRef]
33. Li, L.; Nearing, M.A.; Nichols, M.H.; Polyakov, V.O.; Guertin, D.P.; Cavanaugh, M.L. The effects of DEM interpolation on quantifying soil surface roughness using terrestrial LiDAR. Soil. Tillage Res. 2020, 198, 104520. [Google Scholar] [CrossRef]
34. Leanza, A.; Matranga, G.; Biddoccu, M.; Cavallo, E.; Milella, A.; Reina, G. Novel Measurements and Features for the Characterization of Soil Surface Roughness. IEEE Access 2022, 10, 131735–131746. [Google Scholar] [CrossRef]
35. Nursid, M.; Permatasari, A.; Syafitri, U.D.; Batubara, I. Application of Box-Behnken Design for the Extraction of Padina australis. Molekul 2022, 17, 270–280. [Google Scholar] [CrossRef]
36. Ferreira, S.C.; Bruns, R.E.; Ferreira, H.S.; Matos, G.D.; David, J.M.; Brandão, G.C.; da Silva, E.P.; Portugal, L.A.; Dos Reis, P.S.; Souza, A.S.; et al. Box-Behnken design: An alternative for the optimization of analytical methods. Anal. Chim. Acta 2007, 597, 179–186. [Google Scholar] [CrossRef]
37. Yaghoobi, H.; Fereidoon, A. Modeling and optimization of tensile strength and modulus of polypropylene/kenaf fiber biocomposites using Box–Behnken response surface method. Polym. Compos. 2018, 39, E463–E479. [Google Scholar] [CrossRef]
Miressa SB, Ding Q, Li Y, Amisi EO. Optimization of Tillage Operation Parameters to Enhance Straw Incorporation in Rice-Wheat Rotation Field. Agriculture. 2025; 15(1):54. https://doi.org/10.3390/agriculture15010054
Перевод статьи «Optimization of Tillage Operation Parameters to Enhance Straw Incorporation in Rice-Wheat Rotation Field» авторов Miressa SB, Ding Q, Li Y, Amisi EO., оригинал доступен по ссылке. Лицензия: CC BY. Изменения: переведено на русский язык

















































































































Комментарии (0)