Разработка и создание вспомогательной платформы для работы в саду: на основе схем посадки и рельефа местности
В ответ на отсутствие механизированных вспомогательных платформ для выполнения таких задач по уходу за садом, как обрезка, опрыскивание, прореживание цветов и плодов, а также сбор урожая в садах личи и лонгана, в данной статье предлагается специализированная вспомогательная платформа для работы в холмистых и горных садах.
Аннотация
Платформа оптимизирована для садов с расстоянием между деревьями и междурядьями не более 6 м и уклоном не более 15°. На основе учета схем посадки и параметров рельефа для операционных работ в садах личи и лонгана были тщательно спроектированы ключевые компоненты, включая шасси, подъемное устройство, выдвижное устройство и опорное устройство для работы на склонах. Были проанализированы устойчивость движения, устойчивость при работе на склонах и доступное рабочее пространство вспомогательной платформы, после чего проведены испытания на прототипе. Результаты показывают, что платформа обеспечивает радиус поворота на месте 1,2 м без отклонения от траектории поворота. Она соответствует требованиям к проходимости и рабочим уклонам холмистой местности, как при движении, так и при работе на склонах свыше 15°. Кроме того, платформа имеет рабочую высоту 4,0 м и рабочий радиус 3,7 м, удовлетворяя требованиям для выполнения множества задач. Данное исследование предлагает практичное и эффективное решение для повышения эффективности работ на различных этапах выращивания фруктов, демонстрируя значительную практическую ценность и потенциал для широкого применения.
1. Введение
Работа в саду характеризуется сложностью, высокой трудоемкостью и сезонной концентрацией. В настоящее время, помимо опрыскивания, удобрения и некоторых других аспектов работы в саду, обрезка, прореживание цветов и плодов, а также сбор урожая по-прежнему в основном зависят от ручного труда. Кроме того, существующая садовая техника, используемая для обрезки, прореживания цветов и плодов, сбора урожая и других операций, затрудняет соответствие эксплуатационной эффективности и результативности ручного труда, что делает коммерциализацию сложной на данном этапе. Если взять в качестве примера личи и лонган, данные Китайской системы исследований технологий производства личи и лонгана показывают, что затраты на рабочую силу при выращивании личи и лонгана в настоящее время составляют 54,5% и 62,4% от общих производственных затрат соответственно [ 1 ]. Чрезмерные затраты на рабочую силу ограничили быстрое развитие фруктовой промышленности Китая.
Механическая платформа для обслуживания работ сочетает в себе преимущества полной механизации и ручного управления, не только позволяет эффективно сократить время подъема и опускания рабочего, но и рабочее место платформы для обслуживания работ в саду может хранить рабочие инструменты, вспомогательных рабочих для выполнения обрезки, опрыскивания, прореживания цветов, прореживания фруктов, сбора урожая и других аспектов операционных задач, эффективно повышать эксплуатационную эффективность [ 2 , 3 , 4 ], сокращать время простоя оборудования, по-прежнему имеет большое преимущество на данном этапе. В зависимости от установки рабочего места, формы движения механическую платформу для обслуживания работ в саду можно в целом разделить на фиксированный тип (рабочий стол с персоналом неподвижен), вертикальный подъемный тип (рабочий стол с персоналом можно поднять вертикально), стреловой тип (рабочий стол с персоналом перемещается в пространстве с помощью консольных рычагов) несколько видов.
Платформы для обслуживания сада фиксированного типа [ 5 , 6 ] обычно предоставляют рабочее пространство для рабочих вокруг устройств загрузки и разгрузки ящиков с фруктами и в основном подходят для деревьев веретенообразной формы с короткими корневищами, плотно спланированных в простом саду. Из-за различий в распределении крон плодовых деревьев в вертикальном направлении [ 7 ] исследователи разделили рабочее пространство на независимые пространства с различной вертикальной высотой, т. е. многопозиционную платформу для обслуживания сада, на основе платформы для обслуживания сада фиксированного типа [ 8 , 9 ]. После оснащения каждого независимого пространства подъемной функцией [ 10 ] рабочий, находящийся сзади по направлению движения, может проверять и дополнять работу перед собой. Исследователи также автоматически отрегулировали вертикальную высоту каждого рабочего [ 11 ] и скорость движения платформы для обслуживания [ 12 ] в соответствии с оценкой распределения фруктов при сборе и динамической эффективностью сбора урожая рабочими [ 13 ], тем самым эффективно повышая эффективность сбора.
Когда фруктовые деревья превышают определенную высоту, стационарной вспомогательной платформе для работы в саду становится трудно покрыть всю рабочую высоту. В отличие от стационарных платформ для работы в саду, вертикальный подъемный тип, особенно платформы для работы в саду ножничного типа [ 14 ], которые вертикально поднимают весь рабочий стол с помощью механизма ножничного типа, имеет простую конструкцию, а также возможно увеличить высоту подъема, используя многоступенчатую конструкцию ножничного типа [ 15 , 16 ], которая в настоящее время является подъемным механизмом с самой высокой долей рынка. Поскольку более 60% китайских садов распределены по провинциям с преобладанием холмистой и горной местности [ 17 ], исследователи также провели множество исследований риска опрокидывания [ 18 , 19 ] ножничной платформы для работы в саду, которая поддерживает уровень рабочего стола с помощью регулировки угла наклона и угла бокового наклона [ 20 , 21 ].
Тем не менее, два типа платформ для обслуживания сада, фиксированные и с вертикальным подъемом, имеют небольшой рабочий радиус и плохую приспособляемость к садам с большой шириной кроны и междурядьем. Платформа для обслуживания сада стрелового типа обычно имеет большой боковой и вертикальный рабочий диапазон, чтобы охватывать более широкую часть кроны фруктовых деревьев. Подъемная платформа с 3 степенями свободы, разработанная Дуаном [ 22 ] и другими, и холмистая платформа для обслуживания сада, разработанная Фанем и др. [ 23 ], в некоторой степени увеличили рабочий радиус, но расстояние расширения относительно ограничено. Подъемная платформа серии Squirrel [ 24 ] от CRENDON, Австралия, имеет длинную стрелу, которая позволяет ей иметь больший рабочий радиус и высоту, но длинная стрела также ограничивает подъемную платформу от входа в сады с малым междурядьем.
Подводя итог, можно сказать, что на данном этапе по-прежнему существует потребность во вспомогательной платформе для работы в саду, подходящей для холмистой и горной местности. Эта вспомогательная платформа должна обладать следующими характеристиками: подъемной функцией, позволяющей оборудованию охватывать достаточный диапазон высот; длинной боковой стрелой, позволяющей оборудованию охватывать достаточный диапазон кроны плодовых деревьев; выдвижной боковой стрелой для повышения проходимости оборудования; и безопасностью вождения и работы в большинстве холмистых горных садов. Основываясь на режиме посадки и агротехнических требованиях садов, в этой статье проектируется вспомогательная платформа с подъемным устройством и телескопической стрелой. Были спроектированы и выбраны ключевые компоненты, а также проанализированы устойчивость движения, устойчивость работы на склоне и достижимая рабочая зона всей машины. Был проведен опытный образец полевых испытаний для проверки показателей производительности и рациональности общей конструкции.
2. Материалы и методы
2.1 Общая структура и принцип работы
Схемы посадки и агрономические требования целевых культур имеют решающее значение для определения целевого рабочего пространства платформы помощи в работе с садом и ее параметров проектирования. Если взять личи и лонган в качестве примера, сады личи и лонган в Китае [ 25 , 26 , 27 ] в основном распределены по холмистой и горной местности ( рисунок 1 ), принимая методы посадки с широкими рядами, узкими рядами или почти квадратными рядами, с расстоянием посадки l ряда × l столбца обычно составляет (4–6 м) × (5–6 м), где l ряда и l столбцов , соответственно, представляют собой расстояние между каждым рядом и каждым столбцом фруктовых деревьев. В зависимости от возраста посадки фруктовые деревья можно разделить на молодые деревья, плодоносящие деревья и стареющие деревья. Для плодоносящих деревьев высота дерева h дерева обычно контролируется на уровне 3,5 м, а расстояние от земли до сохраненных толстых вертикальных ветвей и восходящих ветвей составляет 1,2 м. Расстояние между кронами соседних деревьев составляет 1,5 м, поэтому ширина кроны l регулируется в пределах 3–4 м.

Рисунок 1. Схематическая диаграмма схем посадки в садах личи и лонгана: ( а ) сад личи; ( б ) сад лонгана.
На основе требований к конструкции платформы помощи при работе в саду, прототип и трехмерная модель платформы помощи при работе в саду показаны на рисунке 2. Система в основном состоит из следующих компонентов: шагающий механизм, устройство расширения рабочего пространства, обслуживаемый рабочий стол, устройство поддержки операций на склоне, гидравлическая система, генератор и система управления. Устройство расширения рабочего пространства состоит из поворотного механизма, подъемного механизма и механизма выдвижения, которые совместно обеспечивают точное позиционирование и перемещение обслуживаемого рабочего стола в доступном рабочем пространстве. Обслуживаемый рабочий стол хранит рабочие инструменты для рабочих, выполняющих различные задачи. Устройство поддержки операций на склоне обеспечивает устойчивость системы на неровной поверхности, повышая эксплуатационную безопасность и надежность. Гидравлическая система обеспечивает силовую поддержку гидравлических компонентов, гарантируя плавную работу каждого устройства. Система управления координирует и контролирует систему, обеспечивая эффективную и стабильную работу платформы помощи при работе в саду.

Рисунок 2. Структурная схема платформы для обслуживания сада: ( а ) прототип платформы для обслуживания сада; ( б ) 3D-модель платформы для обслуживания сада. (1) Шагающий механизм; (2) устройство поддержки работы на склоне; (3) подъемный механизм; (4) рабочий стол с оператором; (5) механизм выдвижения; (6) гидравлическая система; (7) генератор мощностью 12 кВт; (8) корзина для фруктов; (9) поворотный подшипник; и (10) блок управления.
Принцип работы платформы для обслуживания сада заключается в следующем: рабочие управляют платформой, перемещаясь между рядами деревьев и приближаясь к целевому плодовому дереву. В зависимости от положения платформы и рельефа местности, определяется рабочий режим опорного устройства для работы на склоне, и опорные стойки выдвигаются для приведения платформы в горизонтальное положение. Поворотный механизм вращает рабочий стол оператора вокруг оси подъемного механизма, позволяя качать платформу влево и вправо между рядами деревьев. Подъемный механизм и механизм выдвижения выдвигаются или втягиваются посредством последовательных гидроцилиндров, обеспечивая вертикальное и горизонтальное перемещение рабочего стола оператора. Благодаря согласованной работе подъемного механизма, механизма выдвижения и поворотного механизма рабочий стол оператора приближается к целевой рабочей зоне кроны дерева. Работники на платформе используют инструменты, хранящиеся на рабочем столе оператора, для выполнения таких задач, как обрезка, опрыскивание, прореживание цветов и плодов, а также сбор урожая. После завершения задач на данной территории подъемные и выдвижные механизмы возвращаются на минимальную длину, и рабочие управляют вспомогательной садовой платформой, чтобы переместить ее к следующему целевому дереву, повторяя описанный выше процесс.
2.2. Проектирование ключевых конструкций
2.2.1. Механизм шагания
Как упоминалось ранее, расстояние между кронами соседних деревьев личи и лонгана составляет менее 1,5 м из-за разрастания ветвей, образующихся при редком уходе за деревьями. Чтобы минимизировать повреждения плодовых деревьев при столкновении во время работы, ширина шасси должна быть меньше расстояния между кронами. Платформа для обслуживания сада обычно работает на мягких дорогах или склонах в холмистой местности; поэтому скорость не должна быть слишком высокой, а также требуются хорошие управляемость и тормоза. В шасси используются бесщёточные двигатели постоянного тока для привода и червячные передачи для снижения скорости. Дифференциальное управление шасси достигается за счёт управления разницей скоростей приводных двигателей с каждой стороны. Когда левая и правая гусеницы вращаются в противоположных направлениях с одинаковой скоростью, шасси может осуществлять поворот на месте, при этом диагональ прямоугольника, проецируемая на землю, образует диаметр поворота шасси на месте. Из-за значительного трения между гусеницами и землей при повороте возможны отклонения; поэтому фактический радиус поворота шасси ≤1,5 м считается приемлемым. Конструктивные параметры шасси приведены в таблице 1 .
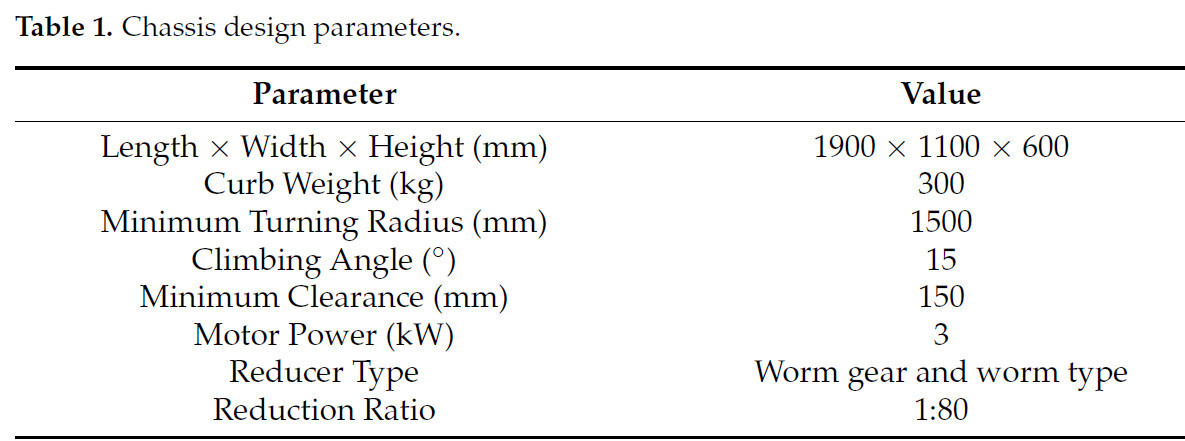
Таблица 1. Параметры конструкции шасси.
2.2.2 Устройство поддержки работы на склоне
Рельеф местности, в котором эксплуатируется платформа для обслуживания садов, обычно холмистый и горный, что часто требует работы на склонах, что создает проблемы для безопасности работников. Поэтому для увеличения длины контакта шасси с землей разработано устройство поддержки работы на склонах, как показано на рисунке 3a .
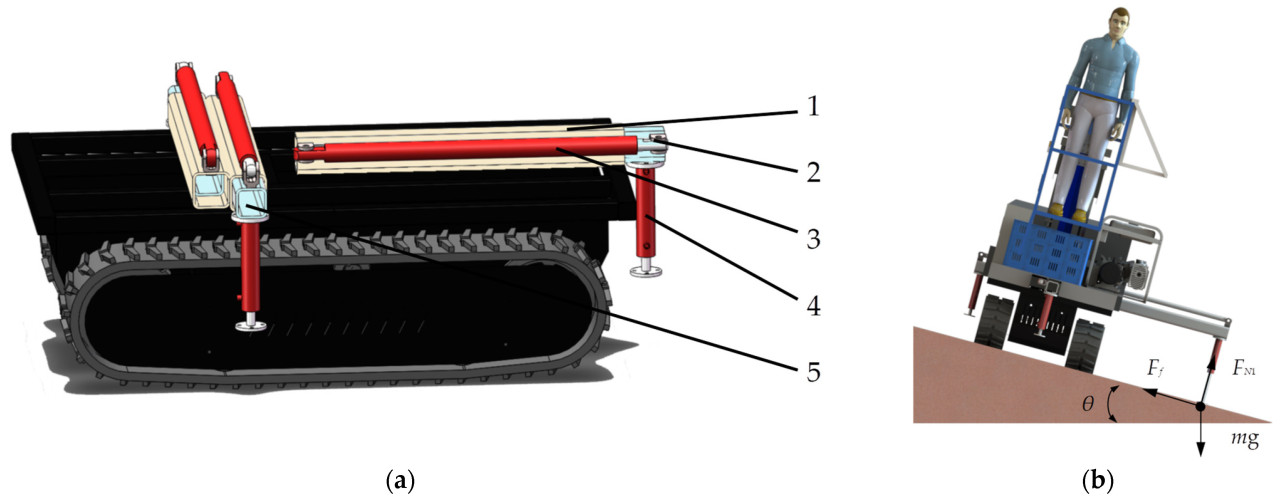
Рисунок 3. Принципиальная схема устройства поддержки работы на склоне: ( а ) структурный состав; ( б ) силовой анализ. (1) неподвижная квадратная труба; (2) фиксирующий штифт цилиндра; (3) выдвижной гидроцилиндр; (4) опорный гидроцилиндр; и (5) подвижная квадратная труба.
Размеры неподвижных и подвижных квадратных труб в опорном устройстве для работы на склоне необходимо рассчитывать с учетом изгибающих моментов и сдвигающих усилий, которые они воспринимают. С учетом сценария экстремальной нагрузки, общий анализ сил, действующих на платформу для обслуживания сада в этом состоянии, представлен на рисунке 3b. В этом сценарии платформа для обслуживания сада готова к опрокидыванию, но гусеницы еще не оторвались от земли, и нагрузка ложится только на одну опорную ногу. Опорный цилиндр можно рассматривать как стержень, на который воздействуют сила F N 1 со стороны земли и давление F N 2, оказываемое подвижной квадратной трубой. Тогда сила, действующая со стороны опорного цилиндра на подвижную квадратную трубу, равна F N 2 , причем F N 2 равна и противоположна по направлению F ′ N 2 . Максимальная сдвигающая сила F Te max и максимальный изгибающий момент M Te max на подвижных квадратных трубах рассчитываются следующим образом:

В формуле F Te max — максимальная сила сдвига подвижной квадратной трубы; M Te max — максимальный изгибающий момент в подвижной квадратной трубе; lABTe — длина выступа подвижной квадратной трубы в полностью выдвинутом состоянии.
Прямоугольные трубы имеют сложные размеры, и индивидуальная проверка прочности неподвижных и подвижных квадратных труб требует больших трудозатрат. Метод Монте-Карло (ММК) [ 28 ], основанный на законе больших чисел и центральной предельной теореме, представляет собой численный метод, использующий случайную выборку для эффективного решения «неформульных» задач. Поэтому ММК используется для упрощения расчётов. Шаги для определения размеров неподвижных и подвижных квадратных труб следующие:
(1) Определите имена переменных и известные значения параметров.
(2) Определите диапазоны значений для параметров, которые необходимо решить, присваивая значения на основе равномерного распределения в этих диапазонах.
(3) Установите взаимосвязи между переменными, такими как размеры неподвижных и подвижных квадратных труб, поперечные силы и изгибающие моменты.
(4) Комбинации параметров фильтра основаны на ограничениях, таких как пределы усилия сдвига и изгибающего момента.
(5) Выберите оптимальную комбинацию параметров.
Путем программирования программы MATLAB, ее решения и сравнения результатов решения с размерами имеющихся в продаже квадратных трубок мы получаем размеры фиксированных и подвижных квадратных трубок, которые представлены в Таблице 2 .

Таблица 2. Параметры конструкции устройства обеспечения работы склона.
2.2.3. Устройство расширения рабочего пространства
Принимая точку пересечения оси вращения поворотного подшипника и земли в качестве начала координат O 0 и устанавливая направление вперед платформы обслуживания сада в качестве положительного направления оси X, направление вверх подъемного механизма в качестве положительного направления оси Z и определяя положительную ось Y с помощью правила правой руки, устанавливается базовая система координат O 0 X 0 Y 0 Z 0 с единицами измерения в миллиметрах. Система координат O 0 X 0 Y 0 Z 0 может быть позиционирована следующими способами: ось X проходит вдоль направления вперед платформы обслуживания сада, а шасси симметрично относительно оси X; ось Z совмещена с осью вращения поворотного подшипника, а центр тяжести подъемного механизма находится на оси Z, и подъемный механизм симметричен относительно оси Z; ось Y может быть определена с помощью правила правой руки; наконец, начало системы координат является пересечением трех осей координат. Таким образом, значения координат X и Y любого компонента в системе координат O 0 X 0 Y 0 Z 0 могут быть определены путем измерения горизонтального расстояния между компонентом и подъемным механизмом, а значение координаты Z компонента может быть определено путем измерения вертикального расстояния между компонентом и землей. Принципиальная схема платформы для обслуживания сада представлена на рисунке 4 .
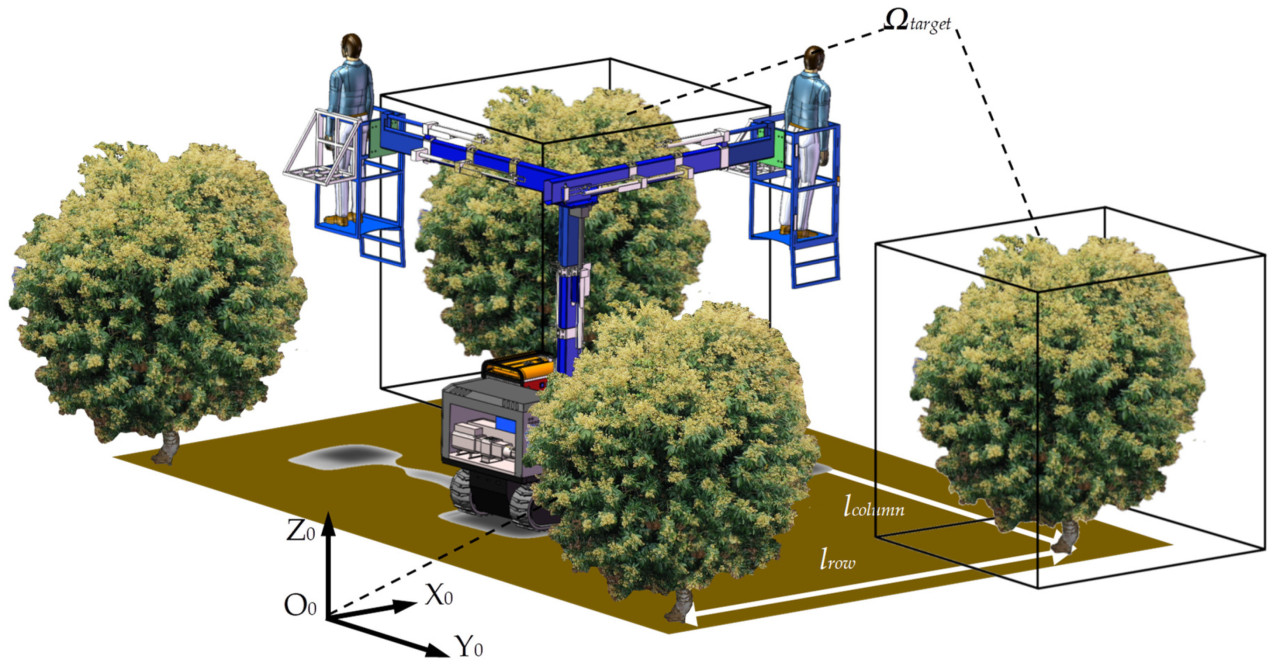
Рисунок 4. Функциональная схема платформы для обслуживания сада.
Учитывая ширину кроны и высоту деревьев личи и лонган, целевое рабочее пространство руки работника, обозначенное как целевое рабочее пространство вспомогательной садовой платформы Ω target 1 , можно определить следующим образом:

В формуле D tx 1 , D ty 1 , D tz 1 представляют собой диапазоны целевого рабочего пространства Ω target 1 по осям X, Y и Z в системе координат O 0 X 0 Y 0 Z 0 соответственно.
Используя формулы (3), рассчитаны максимальные и минимальные значения целевого рабочего пространства платформы помощи в работе в саду по осям X, Y и Z, которые сведены в таблицу 3 .

Таблица 3. Размеры целевой рабочей зоны платформы для обслуживания сада.
Целевое рабочее пространство Ω target 1 представляет собой объединение целевого рабочего пространства стоек с оборудованием Ω target 2 и достижимого рабочего пространства работника. Согласно «GB/T 10000-2023 Параметры тела взрослых китайцев» [ 29 ], медианные значения для взрослых мужчин в возрасте 18–70 лет следующие: функциональная высота досягаемости вверх l p 1 составляет 1993 мм, функциональная длина досягаемости вперед верхних конечностей l p 2 составляет 710 мм, а высота плеч l p 3 составляет 1373 мм.
Таким образом, целевое рабочее пространство стоек с оборудованием Ω target 2 можно выразить как:

В формуле D tx 2 , D ty 2 , D tz 2 представляют собой диапазоны целевого рабочего пространства стоек оборудования по осям X, Y и Z в системе координат O 0 X 0 Y 0 Z 0 .
Максимальные длины l растяжения и l подъема механизмов выдвижения и подъема проектируются таким образом, чтобы удовлетворять следующим требованиям:

В формуле h gu — высота рабочего места оператора; l gu 1 и l gu 2 — длина и ширина рабочего места оператора соответственно.
Для максимального соответствия эксплуатационным требованиям параметры задаются следующим образом: учитывая, что рабочие во время работы часто высовывают верхнюю часть тела за ограждение обслуживаемого рабочего места, а также учитывая нормативы размеров ограждений при высотных работах, высота обслуживаемого рабочего места h gu установлена на уровне 1,1 м для обеспечения баланса безопасности и удобства, длина l gu 1 и ширина l gu 2 обслуживаемого рабочего места рассчитаны на уровне 0,6 м. Расстояние между рядами l и l column принимает максимальное значение 6 м. Точность компенсации l precision установлена на уровне 0,5 м, высота шасси h Classic составляет 0,6 м, а высота поворотного подшипника h Slewing составляет 0,2 м.
Используя формулы (5), максимальные проектные длины для механизмов выдвижения и подъема рассчитываются как l выдвижения = 2190 мм и l подъема = 2307 мм соответственно.
Механизм выдвижения должен достигать пределов целевого рабочего пространства стоек с оборудованием в полностью выдвинутом состоянии и минимизировать контакт с короной при втягивании и повороте, что требует высокого коэффициента телескопичности. Поэтому была выбрана конструкция телескопической стрелы. Исходя из конечных значений целевого рабочего пространства стоек с оборудованием по осям X и Y, была спроектирована трёхсекционная телескопическая стрела с фиксированной длиной стрелы 1 м, подвижной длиной стрелы 1 м, фиксированным выдвижением 0,1 м, выдвижением 0,5 м и длиной в полностью выдвинутом состоянии 2,8 м, что превышает проектное требование в 2190 мм.
В связи со значительной смещающей нагрузкой, создаваемой механизмом выдвижения, и аналогичными требованиями к габаритам, подъёмный механизм также использует конструкцию телескопической стрелы. При фиксированной высоте шасси 0,8 м и с учётом конечных значений целевого рабочего пространства стоек с оборудованием по оси Z выбрана двухсекционная телескопическая стрела с фиксированной длиной стрелы 1,1 м, подвижной длиной стрелы 1 м, фиксированным выдвижением 0,1 м, выдвижением 0,5 м и длиной в полностью поднятом состоянии 2,3 м, что практически соответствует проектному требованию 2307 мм.
Механизмы выдвижения и подъёма образуют вертикальное сечение рабочей зоны стоек с оборудованием. В сочетании с координацией поворотного подшипника они формируют полную рабочую зону стоек с оборудованием. Эти три компонента работают согласованно, расширяя рабочую зону рабочего.
2.3 Экспериментальные методы оценки способности к вождению
2.3.1 Анализ устойчивости движения
Угол крена [ 30 ] относится к углу между опорной плоскостью шасси платформы для обслуживания сада и горизонтальной плоскостью. Максимальный устойчивый угол крена - это угол, при котором платформа для обслуживания сада вот-вот перевернется, но еще не перевернулась; это важнейший показатель безопасной эксплуатации платформы. Учитывая высокий центр тяжести платформы для обслуживания сада и ее частую эксплуатацию на холмистой местности, необходимо определить ее максимальный устойчивый угол крена, чтобы установить безопасные пределы эксплуатации и снизить риск опрокидывания во время движения. Рассматривая сценарии эксплуатации платформы для обслуживания сада, можно выделить три основных положения: продольное движение под уклон, продольное движение под уклон и движение по боковому уклону. Анализ сил для этих трех положений показан на рисунке 5 (с показанным углом наклона θ = 15°), и максимальный устойчивый угол крена этих основных положений должен быть больше 15° для обеспечения безопасности операторов. Силы, действующие на платформу для обслуживания сада, в основном включают собственный вес m0g , сопротивление движению Ftotal и результирующую нормальную силу FNc , действующую со стороны грунта на всю площадь опоры рельса. Для упрощения анализа приняты следующие допущения:
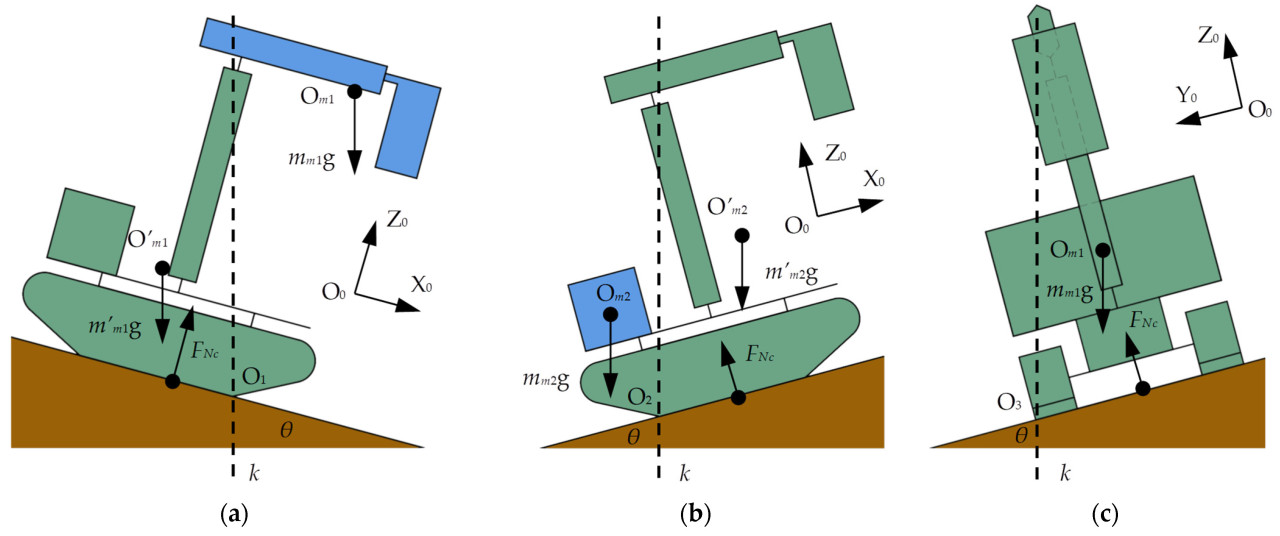
Рисунок 5. Диаграммы сил, действующих на платформу для обслуживания сада на склонах: ( а ) продольное движение под уклон; ( б ) продольное движение под уклон; и ( в ) поперечное движение под уклон.
(1) Когда платформа для обслуживания сада движется с низкой постоянной скоростью по склону, внешними факторами можно пренебречь и можно предположить, что она неподвижна на склоне.
(2) O1 , O2 и O3 представляют собой переднюю, заднюю и левую опорные точки пятна контакта гусеницы с грунтом соответственно. В зависимости от положения автомобиля ось опрокидывания k проходит вертикально через опорную точку. Длина пятна контакта гусеницы с грунтом по оси X составляет xc = 1100 мм, а по оси Z — zc = 1100 мм.
(3) Поскольку оператор и обслуживаемое рабочее место в основном находятся в относительном покое, они рассматриваются как одна единица для расчета центра масс, центра тяжести и т. д. Как правило, оператор весит 75 кг, в то время как вес обслуживаемого рабочего места составляет около 33 кг.
(4) На основе параметров массы и материала каждого компонента платформы вспомогательного оборудования для работы в саду и с помощью SolidWorks 2020 для определения свойств каждой детали, центр тяжести O m 0 платформы вспомогательного оборудования для работы в саду в базовой системе координат O 0 X 0 Y 0 Z 0 определен равным (104, −3, 1031). Таким образом, расстояния между O m 0 и точками опоры O 1 , O 2 и O 3 по осям X, Y и Z округляются до x m 01 = 446 мм, x m 02 = 654 мм, x m 03 = 553 мм, y m 01 = y m 02 = 0, y m 03 = 553 мм, z m 01 = z m 02 = z m 03 = 1031 мм.
После упрощения максимальные устойчивые углы крена для трех положений: продольного спуска, продольного подъема и движения по боковому склону платформы для обслуживания сада рассчитываются отдельно.
- Максимальный устойчивый угол крена при движении под уклон в продольном направлении
На рисунке 5 , а платформа для обслуживания сада имеет только один потенциальный сценарий опрокидывания при движении под уклон в продольном направлении: опрокидывание по часовой стрелке вокруг точки O 1. При изменении угла наклона θ изменяются массы по обе стороны от оси опрокидывания k , и соответственно изменяются моменты, создаваемые этими массами.
Для удобства расчёта приняты дополнительные упрощения для продольного наклона платформы для обслуживания сада: механизм выдвижения, рабочий и рабочее место с оператором расположены по одну сторону от оси опрокидывания k и их положение относительно фиксировано. Их можно рассматривать как единое целое с массой m m 1 = 366 кг и центром тяжести O m 1 в точке (751, −1, 2027) в базовой системе координат O 0 X 0 Y 0 Z 0 . Расстояния от O m 1 до опорной точки O 1 по осям X и Z составляют x m 11 = 201 мм и z m 11 = 2027 мм соответственно. Оставшаяся часть платформы для обслуживания сада рассматривается как еще одно целое с массой m ′ m 1 = 1216 кг и центром тяжести O ′ m 1 в точке (−91, 3, 730), с расстояниями до O 1 x ′ m 11 = 641 мм и z ′ m 11 = 730 мм по осям X и Z соответственно.
Устанавливаем формулу баланса моментов в точке О 1 :

В формуле M O 1 — момент, действующий в точке O 1 ; если M O 1 < 0, платформа для обслуживания сада опрокинется. xi 11 — расстояние по оси X между равнодействующей нормальной силы F Nc и точкой O 1 , которое изменяется в зависимости от положения центра тяжести; при опрокидывании или приближении к опрокидыванию xi 11 = 0 .
По формуле (6) максимальный устойчивый угол крена садовой вспомогательной платформы при продольном спуске рассчитывается примерно на уровне 23,4°, что превышает проектное требование в 15°.
- Максимальный устойчивый угол крена при движении в продольном направлении на подъем
На рисунке 5б платформа для обслуживания сада имеет только один потенциальный сценарий опрокидывания при движении вверх по склону в продольном направлении: опрокидывание против часовой стрелки вокруг точки O2 .
Для удобства расчёта приняты дополнительные упрощения для продольного положения подъёма: гидравлическая станция и центр тяжести садовой платформы расположены по разные стороны от оси опрокидывания, поэтому гидравлическая станция рассматривается как самостоятельный узел массой m² = 196 кг и центром тяжести O² в точке (−614, −3, 784) в базовой системе координат. Расстояния от O² до опорной точки O² составляют x² = 64 мм и z² = 784 мм по осям X и Z соответственно. Оставшаяся часть платформы для обслуживания сада рассматривается как еще одно целое с массой m ′ m 2 = 1385 кг и центром тяжести O ′ m 2 в точке (206, 1066, 3), с расстояниями до O 2 x ′ m 22 = 756 мм и z ′ m 22 = 1066 мм.
Устанавливаем формулу баланса моментов в точке О2 :

В формуле M O 2 — момент, действующий в точке O 2 ; если M O 2 < 0, платформа для обслуживания сада опрокинется. xi 22 — расстояние по оси X между равнодействующей нормальной силы F Nc и точкой O 2 , которое изменяется в зависимости от положения центра тяжести; при опрокидывании или приближении к опрокидыванию xi 22 = 0 .
По формуле (7) максимальный устойчивый угол крена садовой вспомогательной платформы при продольном подъеме s рассчитывается примерно на 32,4°, что превышает проектное требование в 15°.
- Максимальный устойчивый угол крена при движении по боковому склону
На рисунке 5 c платформа для обслуживания сада имеет только один потенциальный сценарий опрокидывания при движении вбок на склоне: опрокидывание против часовой стрелки вокруг точки O 3 .
Устанавливаем формулу баланса моментов в точке О 3 :

В формуле M O 3 — момент, действующий в точке O 3 ; если M O 3 < 0, платформа для обслуживания сада опрокинется. y i 03 — расстояние по оси Y между равнодействующей нормальной силы F Nc и точкой O 3 , которое изменяется в зависимости от положения центра тяжести; если опрокидывания нет, y i 03 = 0,95 м, а когда опрокидывается или приближается к опрокидыванию, y i 03 = 0.
По формуле (8) максимальный устойчивый угол крена платформы для обслуживания сада при движении по боковому склону рассчитывается примерно на 28,2°, что превышает проектное требование в 15°.
Таким образом, максимальные устойчивые углы крена садовой платформы при движении на продольном спуске, продольном подъёме и поперечном уклоне составляют 23,4°, 32,4° и 28,2° соответственно, что превышает проектное требование в 15°. Таким образом, садовая платформа соответствует требованиям к устойчивости при движении на склонах.
2.3.2 Экспериментальные методы
- Радиус поворота
Эксперименты проводились в октябре 2024 года на базе сельскохозяйственной техники Южно-Китайского сельскохозяйственного университета (40°08′11″ с.ш., 116°10′45″ в.д.). Измерительные приборы включали аэрозольные маркеры и рулетки. Платформа для обслуживания сада была перемещена на открытую площадку, а рабочий стол с оператором опущен в крайнее нижнее положение. Аэрозольные маркеры были установлены по четырем углам машины. Во время поворота с помощью пульта дистанционного управления гусеницы с обеих сторон двигались по кругу в противоположных направлениях, совершая полный круг. Измерялся диаметр центрального круга внешней гусеницы.
- Стабильность вождения
В связи с ограничениями условий эксперимента, контактные давления на верхней и нижней сторонах шасси на склонах измерялись следующим методом для оценки устойчивости платформы для обслуживания сада при различных углах крена. Экспериментальные приборы включали углоизмерительный прибор, датчики давления и ноутбук. Экспериментальная площадка имела три длинных склона со средним уклоном 7,6°, 14,3° и 13,5° соответственно. Эксперименты проводились на ровной поверхности, на склоне 7,6° и 14,3°. Во время измерений два датчика давления размещались в точках контакта гусениц с землей на верхней и нижней сторонах склона, собирая данные обратной связи.
2.4 Экспериментальные методы определения устойчивости откосов
2.4.1 Анализ устойчивости эксплуатации склона
Когда рабочие готовятся к выполнению таких задач, как обрезка, опрыскивание, прореживание цветов и плодов, или сбор плодов на обслуживаемом рабочем столе, выдвижные и подъемные механизмы могут выдвигаться или убираться в соответствии с требованиями задачи и вращаться вокруг опорно-поворотного устройства. В этот момент центр тяжести платформы для садоводческих работ смещается наружу, изменяя момент опрокидывания и потенциально приводя к опрокидыванию. Для обеспечения безопасности рабочих перед началом работы необходимо установить устройство поддержки работы на склоне. В зависимости от условий эксплуатации устройство поддержки работы на склоне имеет три режима работы:
(1) Если с левой стороны платформы для обслуживания сада имеется более высокий уклон, то выдвигаются только правая и передняя опорные стойки устройства поддержки работы на склоне.
(2) Если с правой стороны уклон больше, то выдвигаются только левая и передняя опорные ноги.
(3) Если с обеих сторон нет высоких склонов, все три пары опорных стоек выдвигаются.
В связи с изменением центра тяжести платформы для вспомогательных работ в саду и действием опорного устройства для работы на склоне необходимо пересмотреть безопасность опрокидывания платформы. Очевидно, что наиболее вероятный сценарий опрокидывания во время работы показан на рисунке 6 , где платформа для вспомогательных работ в саду имеет наибольший потенциал опрокидывания вокруг опорной точки S. Кроме того, необходимо учитывать следующие факторы:
(1) Из-за опорных стоек гусеницы со стороны опорных стоек могут потерять контакт с землей.
(2) Рабочий и обслуживаемое рабочее место расположены по одну сторону от оси опрокидывания k, в относительно фиксированных положениях, рассматриваемых как единое целое с массой mw0 = 108 кг и центром тяжести Ow0 в точке (215 , −2814, 2714) в базовой системе координат. Расстояния от Ow0 до опорной точки S по осям Y и Z составляют yw0 = 1514 мм и zw0 = 2714 мм.
(3) Механизм выдвижения разделен осью опрокидывания на две части; предполагая, что масса механизма выдвижения равномерно распределена по его длине, массы двух частей равны m w 1 и m w 2 , с центрами тяжести O w 1 (122, 1572·tan θ –1825, 3144) и O w 2 (122, 1572·tan θ –425, 3144) в базовой системе координат. Массы m w 1 и m w 2 составляют (96,4 + 288,6·tan θ ) кг и (257 − m w 1 ) кг соответственно. Расстояния от O w 1 и O w 2 до опорной точки S по осям Y и Z составляют y w 1 = (525–1572·tan θ ) мм, z w 1 = 3144 мм и y w 2 = (875 + 1572·tan θ ) мм, z w 2 = 3144 мм.
(4) Оставшаяся часть платформы для обслуживания сада рассматривается как единое целое с массой m w 3 = 1216 кг и центром тяжести O w 3 в точке (−89, 3, 792). Расстояния от O w 3 до точки опоры S составляют y w 3 = 1297 мм и z w 3 = 792 мм по осям Y и Z.
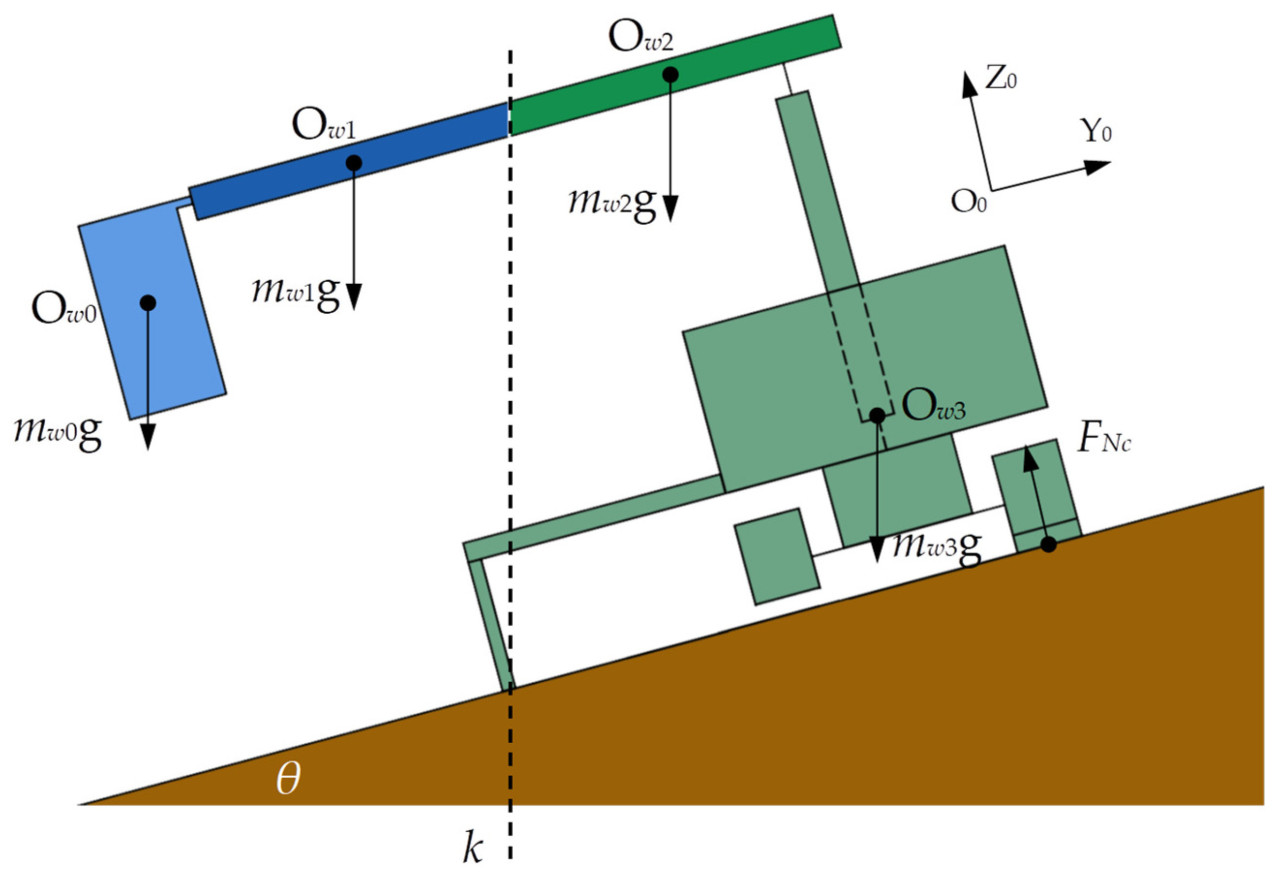
Рисунок 6. Диаграмма усилий на платформе вспомогательного оборудования для садоводства во время работ на склоне.
Устанавливаем формулу баланса моментов в точке S :

В формуле M S — момент, действующий в точке S ; если M S < 0, платформа для обслуживания сада опрокинется. y iS — расстояние по оси Y между равнодействующей нормальной силы F Nc и точкой S , которое изменяется в зависимости от положения центра тяжести; если опрокидывания нет, y iS = 1,6 м, а когда опрокидывается или приближается к опрокидыванию, y iS = 0.
Из формулы (9) следует, что критический угол наклона для работы платформы для обслуживания сада составляет приблизительно 36,07°, что превышает проектное требование в 15° и указывает на безопасную работу в заданных сценариях.
2.4.2 Экспериментальные методы
Экспериментальная площадка для испытаний на устойчивость работы на склоне аналогична экспериментальной площадке для испытаний на устойчивость движения. Были подготовлены экспериментальные приборы, такие как углоизмерительный прибор, датчики давления и ноутбук. Эксперименты проводились на ровной поверхности, на склоне с уклоном 7,6° и 14,3°. В соответствии с рабочими сценариями платформы для помощи в работе в саду, рабочий стол с оператором был перемещен в заданное положение, одна сторона устройства поддержки работы на склоне была выдвинута, а три датчика давления были установлены в точках контакта между опорной стойкой, двумя гусеницами и землей. Были собраны данные обратной связи с датчиков.
2.5 Экспериментальные методы рабочего пространства
Достижимая рабочая зона платформы вспомогательного оборудования для садоводства – это совокупность всех пространственных точек, до которых работник может дотянуться рукой, что представляет собой зону действия платформы. Это важный показатель для оценки эксплуатационных возможностей платформы вспомогательного оборудования для садоводства.
2.5.1 Создание совместных систем координат
Согласно структуре и принципу работы платформы для обслуживания сада, вращение опорно-поворотного устройства и вращение руки рабочего вокруг плеча образуют два вращательных сочленения. Приседание и вставание рабочего, боковое перемещение на обслуживаемом рабочем столе, а также выдвижение/втягивание подъемных и выдвижных механизмов образуют четыре призматических сочленения. Таким образом, во время работ на склоне платформу для обслуживания сада можно смоделировать как последовательный механизм с открытой цепью 2R-4P. Как показано на рисунке 7 , каждый сустав является началом системы координат, для установления систем координат сочленений платформы для обслуживания сада используется метод Денавита-Хартенберга (DH). Здесь l 1 — расстояние от центра верхней поверхности опорно-поворотного устройства до земли, l 2 — минимальное расстояние вдоль направления подъема от центра тяжести выдвижного механизма до центра верхней поверхности опорно-поворотного устройства, l 3 — минимальное расстояние вдоль направления выдвижения от центра тяжести подъемного механизма до дальнего конца обслуживаемого рабочего места, l 5 — расстояние вдоль направления подъема от центра тяжести выдвижного механизма до пола обслуживаемого рабочего места, l 7 — функциональная длина выдвижения верхних конечностей рабочего, а l 4 и l 6 равны 0. Измерения дают l 1 = 800 мм, l 2 = 1400 мм, l 3 = 900 мм, l 5 = 1100 мм и l 7 = 710 мм.
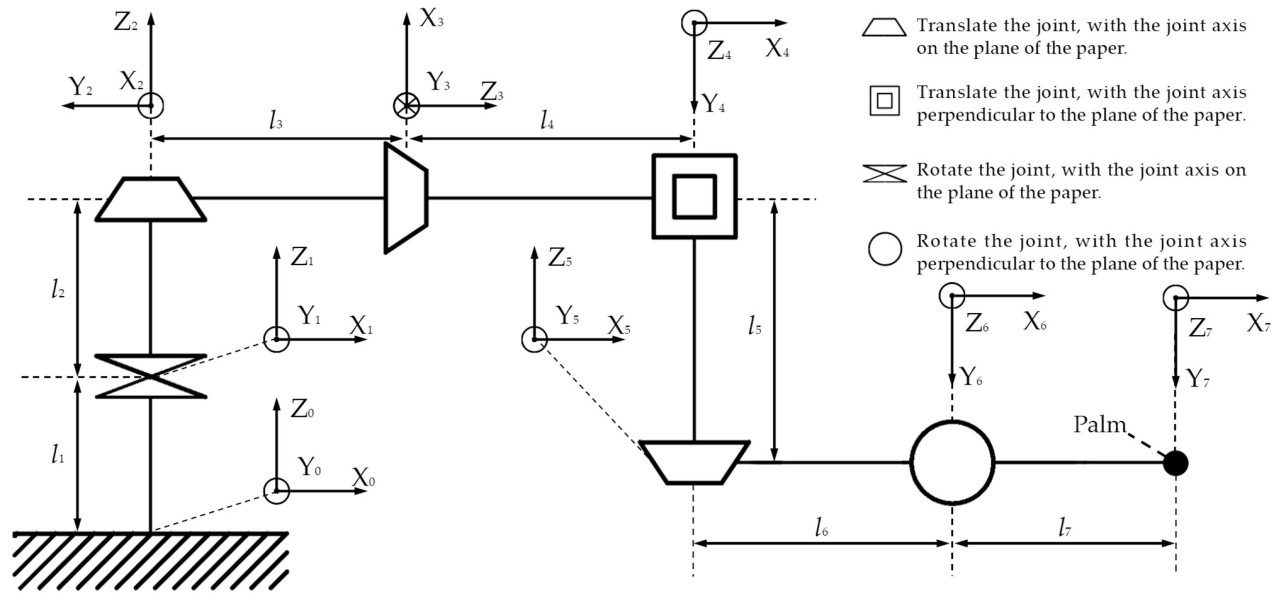
Рисунок 7. Объединенные системы координат платформы поддержки работы в саду.
На основе совместных систем координат структурные параметры платформы для обслуживания сада приведены в таблице 4 .
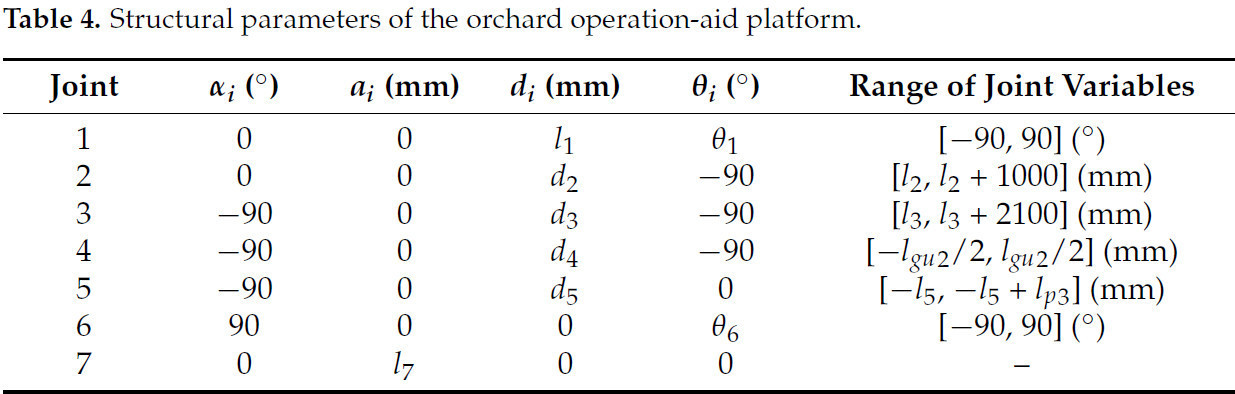
Таблица 4. Конструктивные параметры платформы для обслуживания сада.
В таблице α i — угол закручивания звена, т. е. угол, на который Z i −1 необходимо повернуть вокруг X i −1 для выравнивания с Z i ; когда два звена параллельны, α i = 0°; когда перпендикулярны, α i = 90°. ɑ i — длина звена, т. е. расстояние вдоль X i −1 от Z i −1 до Z i . d i — смещение звена, т. е. расстояние вдоль Z i от X i −1 до X i ; для вращательных соединений d i является постоянным; для призматических соединений d i является переменным. θ i — угол сочленения, т. е. угол, на который X i −1 необходимо повернуть вокруг Z i для выравнивания с X i ; для вращательных соединений θ i является переменным; для призматических соединений θ i является постоянным.
2.5.2 Кинематическое уравнение
Матрица преобразования𝐓𝑖𝑖 − 1между двумя соседними системами координат можно определить с помощью формулы однородного преобразования:
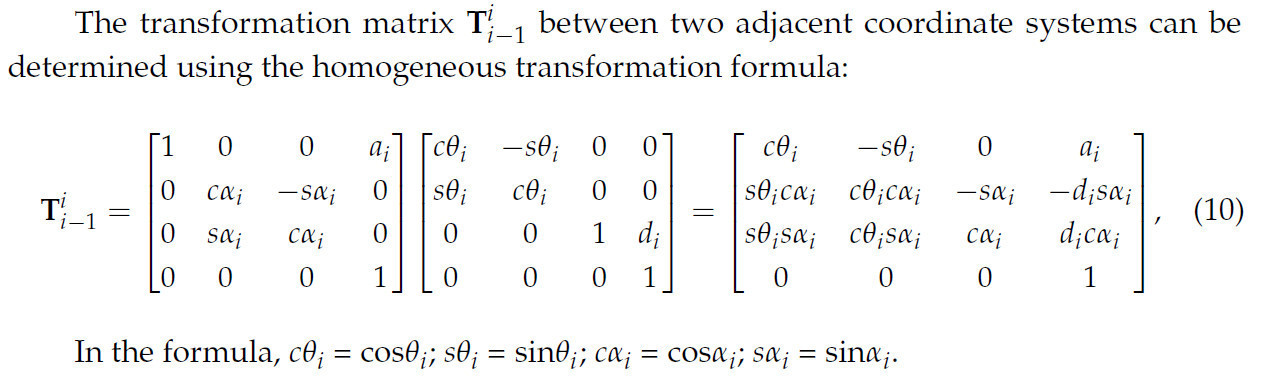
Подставив структурные параметры каждого соединения из Таблицы 4 в приведенную выше формулу, получаем матрицы преобразования между соседними соединениями.
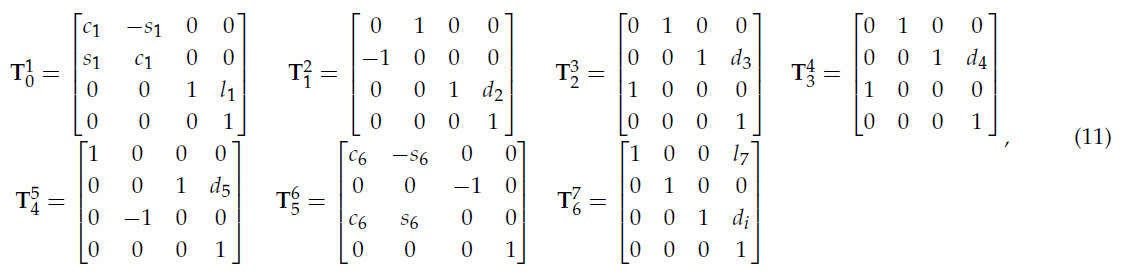
Для платформы для обслуживания сада конечная опорная точка, т. е. центр ладони, относительно базовой системы координат O0 X0 Y0 Z0 может быть определена как:

Подставив матрицы преобразования в приведенную выше формулу, получаем матрицу преобразования конечной опорной точки относительно базовой системы координат, т.е. кинематическую модель платформы вспомогательного оборудования для работы в саду.

В формуле,𝐑70— радиус-вектор конечного органа в базовой системе координат. 𝐏70представляет собой кинематическую связь, полученную в результате преобразований. Таким образом, кинематические уравнения платформы для обслуживания сада можно выразить следующим образом:

Доступное рабочее пространство платформы для обслуживания сада можно получить путем построения карты суставного пространства с использованием кинематических уравнений.
2.5.3. Доступное рабочее пространство
Используя метод Монте-Карло для построения суставного пространства в соответствии с распределением обратного синуса, суставное пространство сопоставляется с рабочим пространством с использованием кинематических уравнений, получая достижимое рабочее пространство платформы для обслуживания сада, как показано на рисунке 8 .
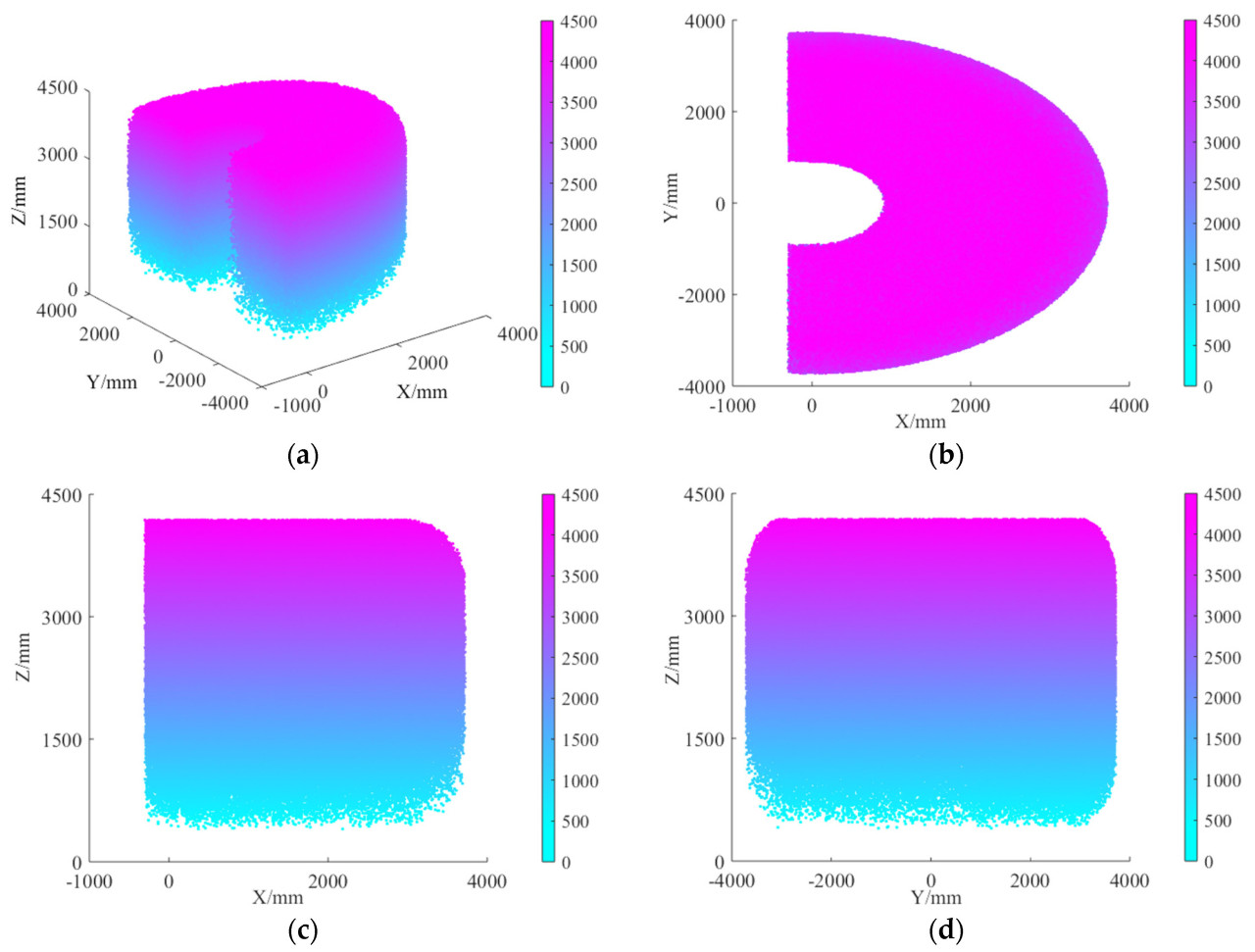
Рисунок 8. Доступное рабочее пространство платформы для обслуживания сада: ( а ) трехмерный вид; ( б ) поперечное сечение XY; ( в ) поперечное сечение XZ; и ( г ) поперечное сечение YZ.
Из рисунка можно получить максимальные значения достижимой рабочей зоны платформы вспомогательного оборудования для садоводства по осям X, Y и Z, округлить их и свести в Таблицу 5. Теоретически достижимая рабочая зона платформы вспомогательного оборудования для садоводства охватывает целевую рабочую зону.

Таблица 5. Размеры доступного рабочего пространства садовой вспомогательной платформы.
2.5.4 Экспериментальные методы
Проверочный эксперимент прототипа был проведен в саду Ухуа в Маомине (110.969° в. д., 21.752° с. ш.) для получения фактического рабочего радиуса и высоты платформы для обслуживания сада, оценки ее фактических рабочих характеристик и проверки применимости в саду, а также точности проектирования размеров механизма. Эксперимент включал управление механизмом выдвижения, подъемным механизмом и поворотным подшипником до их минимальных и максимальных значений. Положение рабочего (стоя или приседая) регулировалось по мере перемещения подъемного механизма вверх или вниз. Расстояния от ладони рабочего до земли и центра масс подъемного механизма измерялись, что давало крайние границы фактического достижимого рабочего пространства платформы для обслуживания сада. Функциональная высота досягаемости рабочего сверху и функциональная длина досягаемости верхних конечностей вперед составляют 2203 мм и 770 мм соответственно.
3. Результаты
Для проверки основных характеристик оборудования был создан прототип физической машины (рис.2,а) и проведены полевые испытания в соответствии с ранее разработанной экспериментальной программой. Результаты экспериментов и их анализ представлены ниже.
3.1. Способность управлять автомобилем
3.1.1 Радиус поворота
Платформа для обслуживания сада была перемещена на открытую площадку, а рабочий стол с оператором опущен в крайнее нижнее положение. По четырем углам машины были установлены маркеры-распылители. Измерялся диаметр центральной окружности внешнего трека. Схема испытаний представлена на рисунке 9 .
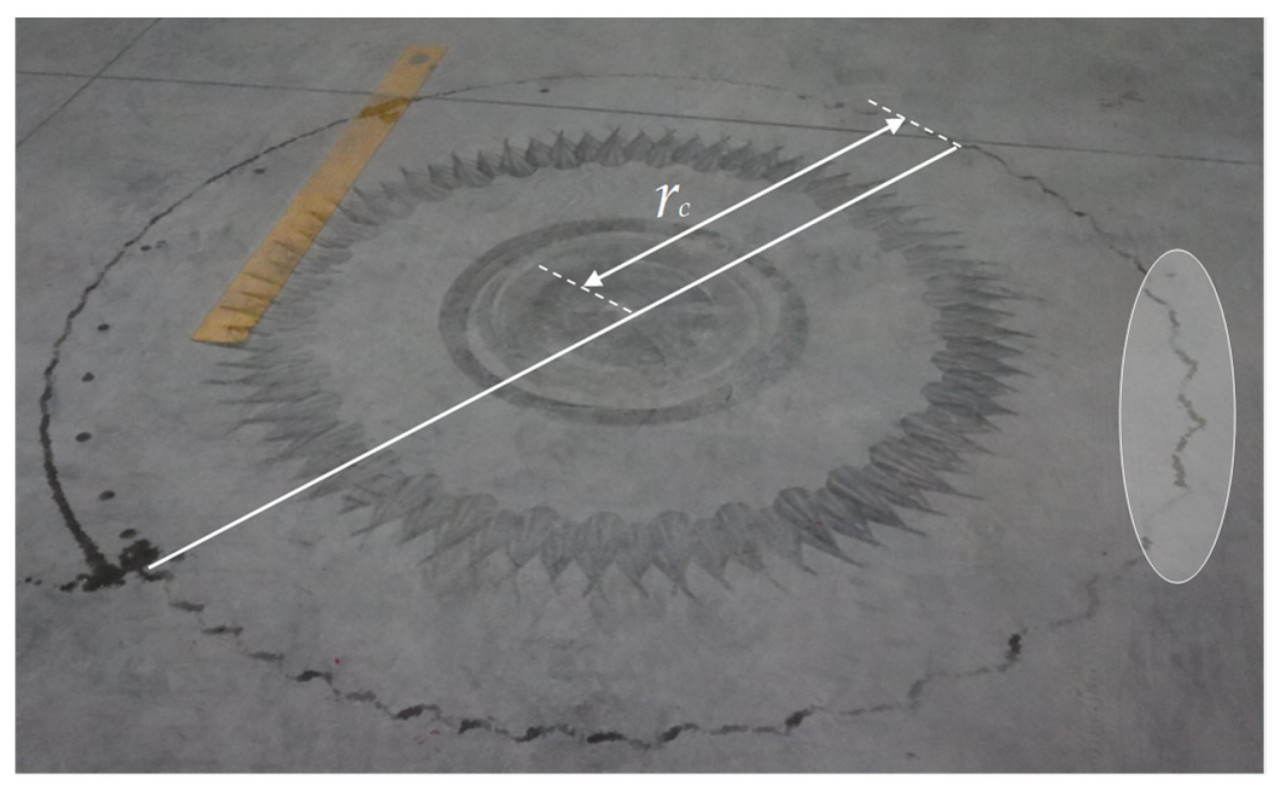
Рисунок 9. Полевые испытания радиуса поворота платформы для обслуживания сада.
На рисунке 9 видно, что траектория поворота платформы для обслуживания сада близка к круговой, что свидетельствует об относительной стабильности выходной мощности двигателей по обе стороны рельсов во время поворота. Однако внешняя траектория, прочерченная распылительными маркерами, демонстрирует заметные неровности, указывающие на периодические скачки во время поворота, что указывает на необходимость оптимизации логики выходной мощности двигателей в будущем. Испытание было повторено трижды, результаты представлены в таблице 6 .
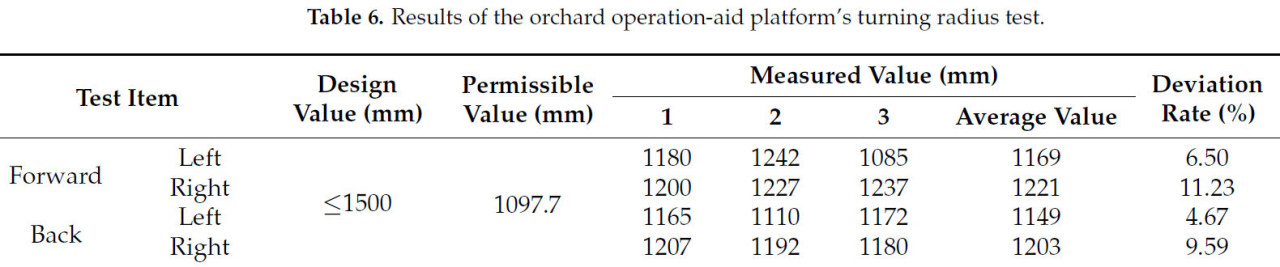
Таблица 6. Результаты испытания радиуса поворота платформы для обслуживания сада.
Путем вычисления среднего значения трёх измерений определяется минимальный радиус поворота за один проход. Результаты показывают, что радиусы поворота влево и вправо при движении вперёд и назад практически одинаковы, при этом средний минимальный радиус поворота составляет 1186 мм, что соответствует 1,2 м. По сравнению с проектным значением средний уровень отклонения составляет ≤8,05%, что свидетельствует о хорошей управляемости платформы для обслуживания сада.
3.1.2. Устойчивость вождения
Сценарии эксперимента показаны на рисунке 10 .
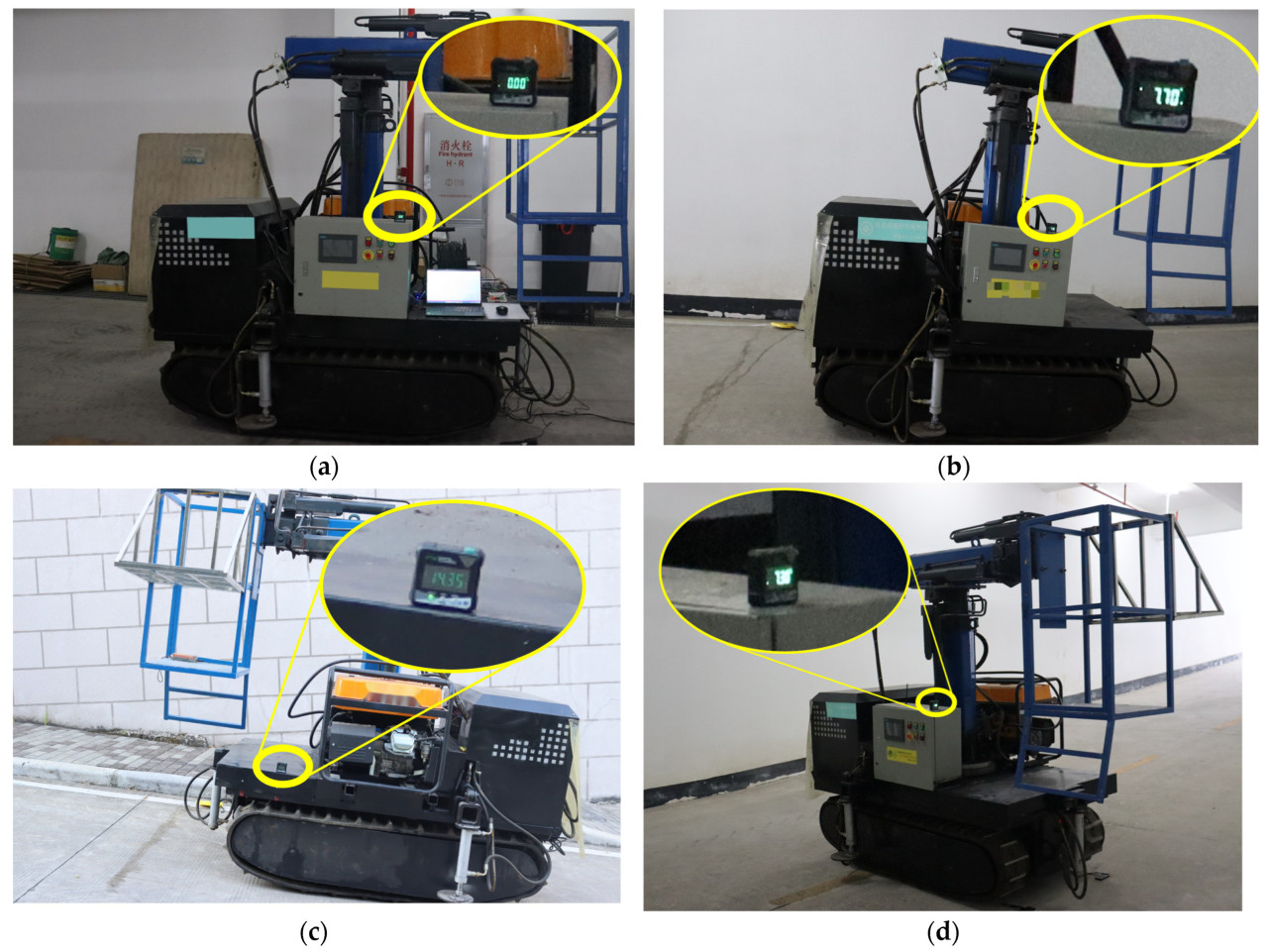
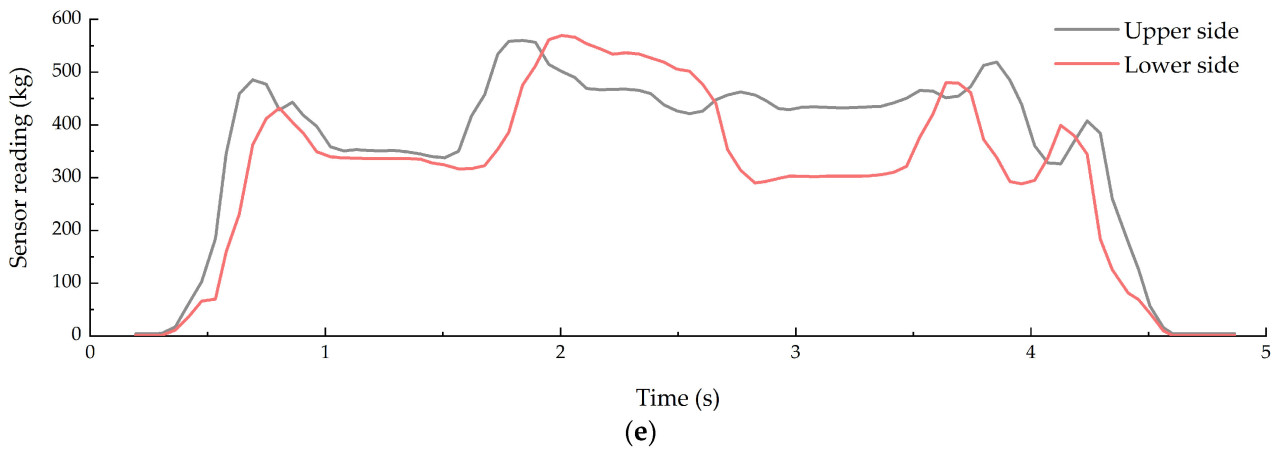
Рисунок 10. Полевые эксперименты по проверке устойчивости движения платформы для обслуживания сада: ( a ) движение по поверхности с уклоном 0°; ( b ) спуск по склону 7,6°; ( c ) подъем по склону 14,3°; ( d ) боковое движение по склону 7,6°; и ( e ) данные датчиков при движении оборудования в продольном направлении под уклон по поверхности с уклоном 0°.
Из рисунка 10 е можно увидеть:
(1) Из-за множественных точек контакта между гусеницами и землей обратная связь данных от двух датчиков меньше фактического значения; однако последовательные тенденции в данных обратной связи отражают их эталонное значение.
(2) Поскольку контакт гусениц с землёй не является непрерывным, а перекатывание гусениц может привести к смещению датчиков, данные обратной связи от датчиков демонстрируют колебания и задержки. Поэтому за результат эксперимента принимается максимальное значение измеренных данных в каждом процессе эксперимента.
Вышеуказанные этапы эксперимента были повторены несколько раз, а результаты измерений записаны в Таблице 7 .
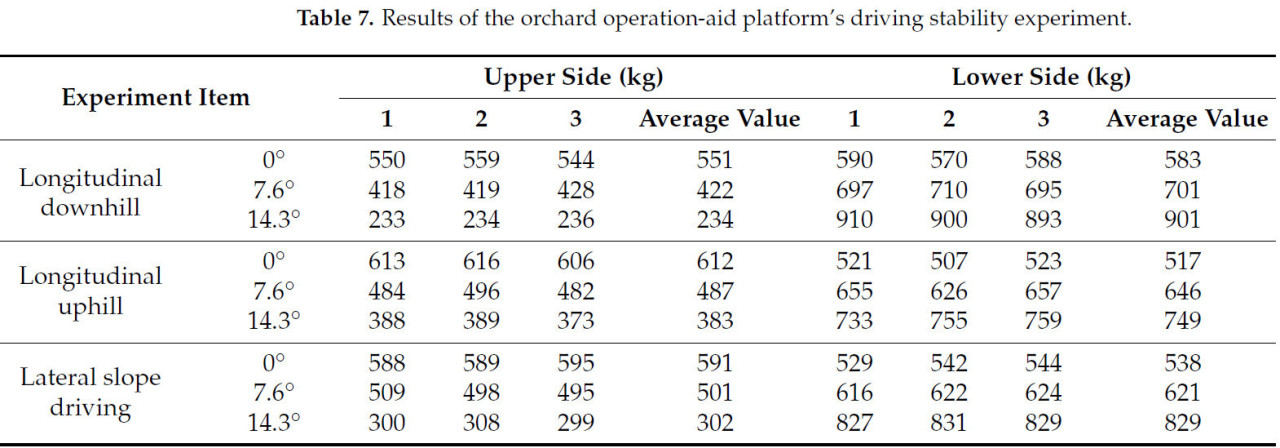
Таблица 7. Результаты эксперимента по устойчивости движения платформы помощи при работе в саду.
Из Таблицы 7 можно сделать вывод:
(1) Масса распределена несимметрично по оси X; сторона с генератором имеет большую массу. При боковом движении рекомендуется располагать генератор на верхней стороне склона, чтобы снизить риск опрокидывания.
(2) По мере увеличения уклона контактное давление между шасси и верхней стороной склона постепенно уменьшается, при этом наименьшее давление наблюдается при спуске на уклоне 14,3°, что эквивалентно силе тяжести объекта массой 234 кг, т. е. 2293 Н.
(3) Давление в зоне контакта между шасси и нижней стороной склона постепенно увеличивается по мере увеличения склона, достигая наибольшего значения при движении под уклон 14,3°, что эквивалентно силе тяжести предмета массой 901 кг, т. е. 8830 Н.
Экспериментальные результаты согласуются с теоретическим анализом, указывая на то, что платформа для обслуживания сада может нормально функционировать в типичных холмистых садах.
3.2 Эксплуатационная устойчивость склона
Сценарий эксперимента показан на рисунке 11 .
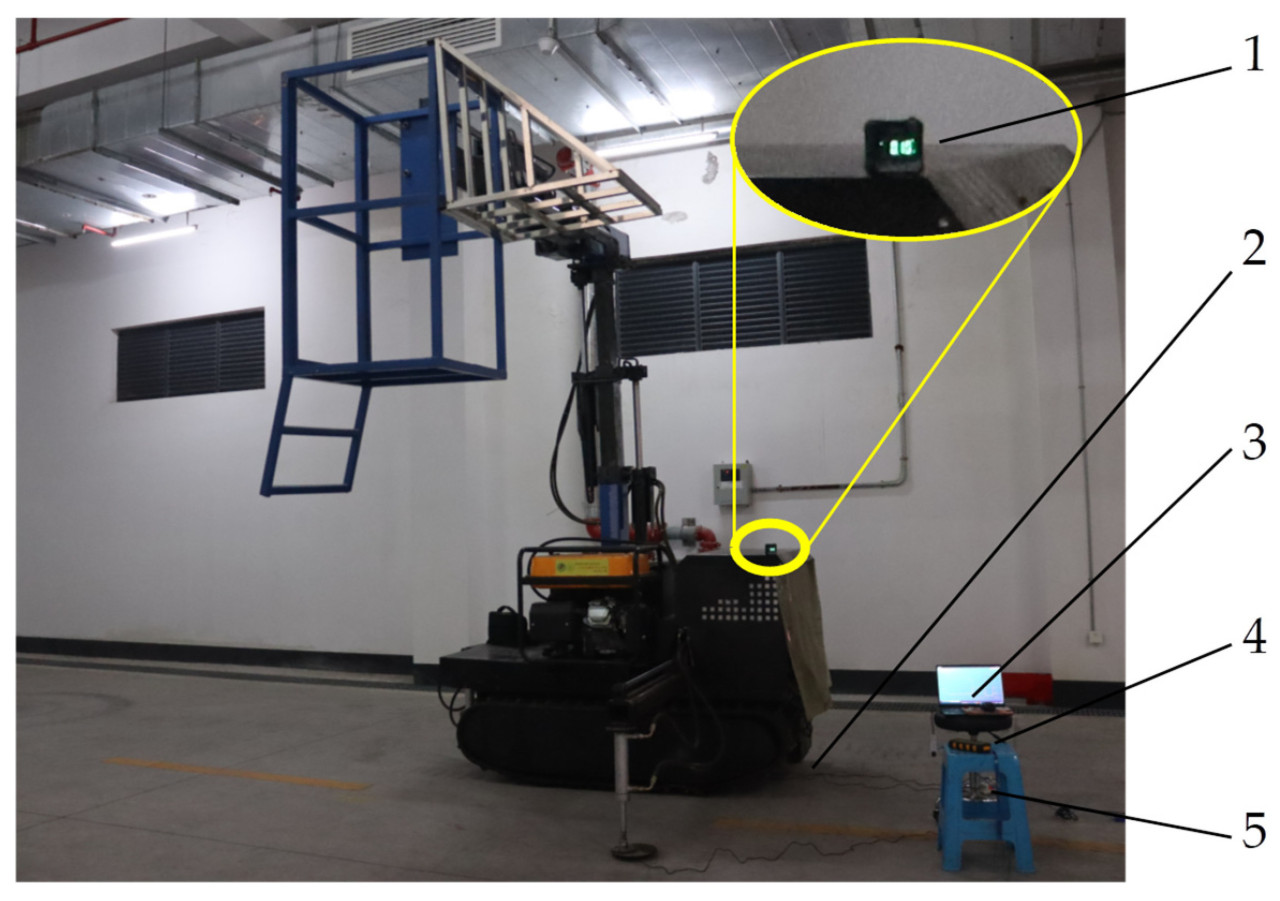
Рисунок 11. Полевой эксперимент по использованию платформы для помощи в работе в саду на склоне: (1) прибор для измерения угла; (2) датчик давления; (3) программное обеспечение для мониторинга датчика; (4) пульт дистанционного управления; и (5) цифровой датчик силы.
Как показано на рисунке 11 , для эксперимента по проверке эксплуатационной устойчивости, проведённого на ровной поверхности, три датчика были размещены на прямой линии под опорной ногой и двумя гусеницами. Данные с датчиков были получены и обработаны с помощью программного обеспечения для мониторинга датчиков (SEMT 1.27.3). Повторите этапы эксперимента, выполните несколько измерений и запишите результаты в таблицу 8 .
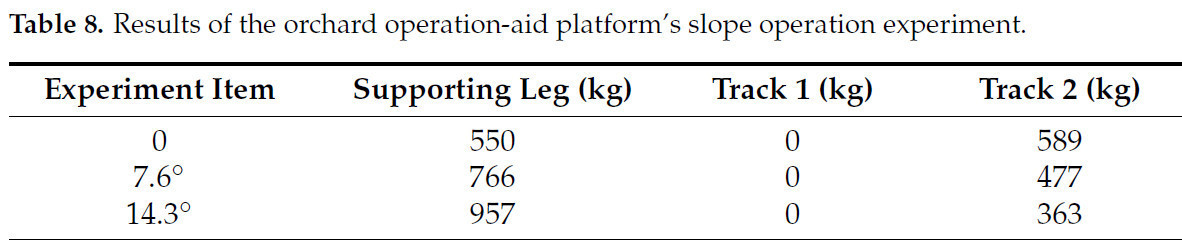
Таблица 8. Результаты эксперимента по эксплуатации платформы для обслуживания сада на склоне.
Из таблицы видно, что с увеличением уклона контактное давление между шасси и верхней частью уклона постепенно уменьшается, достигая наименьшего значения при уклоне 14,3°, что эквивалентно силе тяжести объекта массой 363 кг, то есть 3557 Н. Контактное давление между опорной стойкой и грунтом постепенно увеличивается с увеличением уклона, достигая максимального значения, эквивалентного силе тяжести объекта массой 957 кг, то есть 9379 Н, при уклоне 14,3°. Это свидетельствует об эффективности устройства поддержки работы на уклоне и отсутствии опрокидывания даже при уклоне 14,3°, что предоставляет числовые данные для стандартизации рабочих сценариев платформы для обслуживания сада.
3.3. Рабочее пространство
Сценарий эксперимента показан на рисунке 12 .

Рисунок 12. Полевой эксперимент рабочего пространства платформы помощи при работе в саду.
Как показано на рисунке 12 , мы провели эксперименты на относительно ровной поверхности в саду. Мы контролировали оборудование в соответствии с параметрами соединения, соответствующими предельным значениям рабочего пространства, полученным в результате моделирования, и измеряли радиус и высоту работы с помощью рулетки. Повторите экспериментальные этапы, выполните несколько измерений и запишите результаты в таблицу 9 .
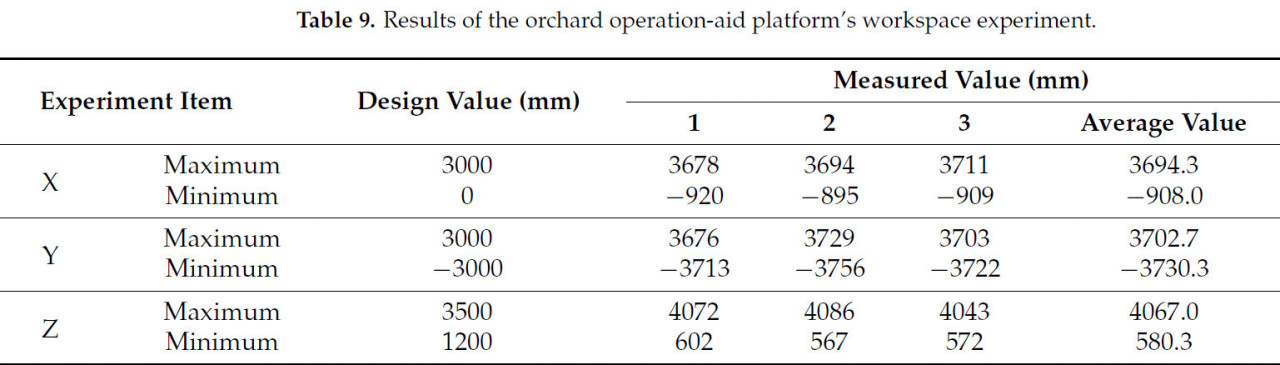
Таблица 9. Результаты эксперимента с рабочим пространством платформы помощи при работе в саду.
Из Таблицы 9 видно, что радиус действия и высота платформы для обслуживания сада, т.е. максимальные расстояния от начала координат по осям X, Y и Z в фактической достижимой рабочей зоне, составляют 3694 мм, 3730 мм и 4067 мм соответственно. Таким образом, радиус действия и высота платформы для обслуживания сада составляют 3,7 м и 4,0 м соответственно, что соответствует проектным требованиям.
Важно отметить, что между измеренными значениями фактического достижимого рабочего пространства и теоретическими значениями наблюдаются значительные расхождения. Конечно, эти погрешности не влияют на общую оценку экспериментальных результатов. Основные причины таких расхождений могут быть следующими:
(1) Для минимизации трения при движении телескопических рукавов в механизмах подъёма и выдвижения на концах каждой телескопической стрелы установлены ползунки из сверхвысокомолекулярного полиэтилена (СВМПЭ). Толщина этих ползунов влияет на зазор между соседними телескопическими стрелами, из-за чего оси соседних телескопических стрел не совпадают друг с другом при их полном выдвижении, что приводит к «изгибу» механизмов подъёма и выдвижения.
(2) Неровный рельеф сада приводит к изменению углов наклона поверхности, что приводит к ошибкам в измерениях высоты.
(3) Рабочий может находиться в шести рабочих позах: стоя с вытянутыми руками вперёд, назад, влево, вправо и вверх, а также при приседании с вытянутыми руками вниз. Для упрощения кинематической модели в предыдущем обсуждении не рассматривались позы назад, влево и вправо. Эти три позы мало влияют на конечные результаты эксперимента, в частности, на радиус и высоту рабочего пространства.
4. Обсуждение
В целом, данное исследование направлено на разработку платформы для управления садом, основанной на схемах посадки и рельефе местности, включая конструкцию телескопической стрелы и опорных устройств, анализ устойчивости движения, анализ эксплуатационной устойчивости, анализ рабочего пространства и полевые эксперименты. Эта работа способствует механизации садоводства в холмистых районах и имеет широкий потенциал применения.
Платформа для обслуживания сада, разработанная в этом исследовании, отличается большим рабочим диапазоном, а ее подъем и выдвижение осуществляются с помощью телескопической стрелы, что позволяет ей перемещаться по узким дорогам. В отличие от этого, платформа для обслуживания сада, упомянутая в литературе [ 31 ], имеет длину рамы 3437 мм и ширину рамы 1650 мм, что приводит к небольшому рабочему радиусу и большому радиусу поворота, что делает ее непригодной для узких дорог в холмистой местности. Кроме того, центр тяжести спроектированного оборудования непрерывно изменяется вместе с вращением поворотного подшипника. Хотя работы в литературе [ 32 , 33 ] могут поддерживать центр тяжести оборудования в определенном диапазоне уклонов, их рабочий диапазон ограничен, а регулировка происходит медленно, что делает их непригодными для этого оборудования. Опорное устройство, разработанное в этом исследовании, эффективно увеличивает рабочий диапазон уклонов оборудования, тем самым повышая безопасность рабочих во время работы.
В ходе полевых экспериментов возникли некоторые проблемы с прототипом, и обобщение этих проблем может дать важные справочные данные для будущих усовершенствований:
(1) Толщина ползунов, установленных на концах каждой телескопической стрелы, слишком мала, а зарезервированное пространство слишком велико, что приводит к изгибу телескопической стрелы при подъеме и выдвижении. В дальнейшем необходимо будет сбалансировать толщину ползунов телескопической стрелы, сопротивление трению и величину деформации во время работы.
(2) Скорость работы гидравлических компонентов относительно низкая и требует увеличения. Однако слишком высокая скорость работы гидравлического компонента может повлиять на устойчивость оборудования, что может привести к опрокидыванию. Поэтому в будущем необходимо будет обеспечить баланс между скоростью работы гидравлических компонентов и безопасностью оборудования.
(3) Телескопическая стрела изготовлена из промышленных материалов, которые, хотя и отвечают некоторым функциональным требованиям, имеют явно завышенные конструктивные параметры, такие как грузоподъёмность. Это приводит к увеличению веса и повышению общего центра тяжести оборудования. В дальнейшем телескопическую стрелу следует проектировать с учётом условий эксплуатации.
(4) Когда рабочие находятся на рабочем месте, перемещение материалов на землю становится затруднительным. В будущем можно будет усовершенствовать систему фиксированных блоков для облегчения этого процесса.
5. Выводы
Для решения проблемы ограниченной адаптации существующих вспомогательных платформ к условиям сада в настоящем документе определяются требования к конструкции, общей структуре и основным техническим параметрам с учетом особенностей посадки и рельефа местности. Вспомогательная платформа может помочь оператору выполнять обрезку, опрыскивание, прореживание цветов и плодов, сбор урожая и т.д. в холмистых и горных садах с расстоянием между растениями и междурядьями не более 6 м и уклоном не более 15°. Это нововведение повышает эффективность работы и снижает трудоемкость.
(1) Объединяя схемы посадки и эксплуатационные топографические параметры садов личи и лонгана, были спроектированы ключевые компоненты платформы для обслуживания сада, включая шасси, подъемный механизм, механизм выдвижения и устройство поддержки работы на склоне, с использованием в качестве индикаторов таких параметров, как скорость движения, радиус поворота, высота подъема, длина выдвижения и опорные силы.
(2) Максимальные углы крена платформы для обслуживания сада были проанализированы в трёх типичных условиях движения: продольном спуске, продольном подъёме и движении на боковом склоне, а также в экстремальных условиях движения на склоне. Во всех случаях углы крена превышали проектные 15°, что свидетельствует об устойчивости и адаптивности платформы к сложным рельефам.
(3) Кинематическая модель платформы для обслуживания сада была разработана с использованием метода параметров DH, а её достижимая рабочая зона была получена методом Монте-Карло. Результаты имитационного эксперимента показывают, что максимальные значения размеров платформы по осям X, Y и Z составляют 3722 (мм), 3722 (мм) и 4183 (мм) соответственно, что превышает проектные значения. Это свидетельствует о том, что достижимая рабочая зона платформы для обслуживания сада больше целевой рабочей зоны, что соответствует проектным требованиям.
(4) Анализируя эксплуатационную безопасность и эксплуатационные характеристики вспомогательной садовой платформы, результаты эксперимента показывают, что радиус поворота на месте вспомогательной садовой платформы составляет 1,2 м, углы наклона при движении и наклона при работе превышают 15°, рабочая высота составляет 4,0 м, а рабочий радиус составляет 3,7 м. Вспомогательная садовая платформа соответствует требованиям проходимости и эксплуатации холмистых садов.
Ссылки
1. South Subtropical Crops Center, Ministry of Agriculture and Rural Affairs. Report on the Development of China’s Litchi and Longan Industries; China Tropical Agriculture: Beijing, China, 2024; pp. 5–7. [Google Scholar]
2. Coppock, G.E.; Jutras, P.J. An Investigation of the Mobile Picker’s Platform Approach to Partial Mechanization of Citrus Fruit Picking. Proc. Fla. State Hortic. Soc. 1960, 73, 258–262. [Google Scholar]
3. Baugher, T.; Schupp, J.; Lesser, K.; Harsh, R.M.; Seavert, C.; Lewis, K.; Auvil, T. Mobile Platforms Increase Orchard Management Efficiency and Profitability. In Acta Horticulturae; International Society for Horticultural Science (ISHS): Leuven, Belgium, 2009; pp. 361–364. [Google Scholar] [CrossRef]
4. Radicioni, L.; Bono, F.; Cinquemani, S. On the use of vibrations and temperatures for the monitoring of plastic chain conveyor systems. Mech. Syst. Signal Process. 2025, 223, 111935. [Google Scholar] [CrossRef]
5. Bandit Cub Info. Automated Ag. Available online: https://www.automatedag.com/bandit-cub-info (accessed on 4 December 2024).
6. Zhang, Z.; Heinemann, P.H.; Liu, J.; Schupp, J.R.; Baugher, T.A. Design and Field Test of a Low-Cost Apple Harvest-Assist Unit. Trans. ASABE 2016, 59, 1149–1156. [Google Scholar] [CrossRef]
7. Berlage, A.G.; Langmo, R.D.; Yost, G.E. Limitations of Single- and Multi-Man Platform Harvesting Aids. 1972. Available online: https://ir.library.oregonstate.edu/concern/administrative_report_or_publications/kk91fk93k (accessed on 4 December 2024).
8. Mechanization Is Rolling Along—Video—Good Fruit Grower. Available online: https://www.goodfruit.com/mechanization-is-rolling-along/ (accessed on 4 December 2024).
9. Yang, Z.; Wang, Y.; Han, B.; Jin, H.; Chen, J. Research and Design on Conveying System for Tractive Orchard Picking Platform. J. Chin. Agric. Mech. 2017, 38, 24–28. [Google Scholar]
10. Li, Q.; Fan, G.; Wang, X.; Zhang, X.; Wang, J. Development of a Fruit Conveying Device for Self-Propelled Orchard Picking Platform. J. Agric. Mech. Res. 2019, 41, 116–119+152. [Google Scholar] [CrossRef]
11. Fei, Z.; Vougioukas, S.G. Co-Robotic Harvest-Aid Platforms: Real-Time Control of Picker Lift Heights to Maximize Harvesting Efficiency. Comput. Electron. Agric. 2021, 180, 105894. [Google Scholar] [CrossRef]
12. Fei, Z.; Vougioukas, S.G. A Robotic Orchard Platform Increases Harvest Throughput by Controlling Worker Vertical Positioning and Platform Speed. Comput. Electron. Agric. 2024, 218, 108735. [Google Scholar] [CrossRef]
13. Peterson, D.L. Development of a Harvest Aid for Narrow-Inclined-Trellised Tree-Fruit Canopies. Appl. Eng. Agric. 2005, 21, 803–806. [Google Scholar] [CrossRef]
14. CUI, Z.; GUAN, C.; CHEN, Y.; GAO, Q.; YANG, Y. Design of Small Multi-Functional Electric Crawler Platform for Greenhouse. Trans. Chin. Soc. Agric. Eng. 2019, 35, 48–57. [Google Scholar]
15. Zhang, H. Design of Multifunctional Orchard Lifting Platform in Electric Crawler Type. Master’s Thesis, South China Agricultural University, Guangzhou, China, 2017. [Google Scholar]
16. Liu, D.; Xie, F.; Li, X.; Wang, X. Design and experiment of small lifting platform in orchard. Trans. Chin. Soc. Agric. Eng. 2015, 31, 113–121. [Google Scholar]
17. Yongjun, Z.; Shijie, J.; Bingtai, C.; Haotun, L.; Chang, W.; Feng, K. Review on Technology and Equipment of Mechanization in Hilly Orchard. Trans. Chin. Soc. Agric. Mach. 2020, 51, 1–20. [Google Scholar]
18. Cutini, M.; Brambilla, M.; Bisaglia, C.; Melzi, S.; Sabbioni, E.; Vignati, M.; Cavallo, E.; Laurendi, V. A Study of the Lateral Stability of Self-Propelled Fruit Harvesters. Agriculture 2017, 7, 92. [Google Scholar] [CrossRef]
19. Melzi, S.; Sabbioni, E.; Vignati, M.; Cutini, M. Numerical Analysis of Rollover Risk of a Fruit-Harvesting Truck. J. Adv. Veh. Eng. 2017, 3, 112–120. [Google Scholar]
20. Yongchao, Y.; Feng, K.; Yongjun, Z.; Haotun, L.; Yaxiong, W. Design and simulation of the automatic-leveling high-position platform in orchards. J. Beijing For. Univ. 2021, 43, 150–159. [Google Scholar]
21. Liu, X.; Zhong, B.; Chu, Y.; Liu, X.; Qin, X.; Zhang, C. Design and analysis of lifting and leveling mechanism for new orchard picking platform. J. Chin. Agric. Mech. 2020, 41, 80–85+106. [Google Scholar] [CrossRef]
22. Duan, Z.; Qiu, W.; Ding, W.; Liu, Y.; Ouyang, Y.; Huang, L. Tilting Stability Analysis and Experiment of the 3-DOF Lifting Platform for Hilly Orchards. Int. J. Agric. Biol. Eng. 2018, 11, 73–80. [Google Scholar] [CrossRef]
23. Fan, G.; Wang, Y.; Wang, J.; Zhang, X. Development and Experiment of Platform for Orchards in Hill Area. J. Agric. Mech. Res. 2016, 38, 77–81. [Google Scholar]
24. Crendon Machinery. Available online: https://www.crendon.com.au/ (accessed on 4 December 2024).
25. NY/T 5174-2002; Pollution-Free Food Litchi Production Technical Regulations. Ministry of Agriculture of the People’s Republic of China: Bejing, China, 2002.
26. Zhang, W. Interpretation of DB4403/T 295-2022, Code of Practice for Longan Production. China Stand. 2023, 20, 145–150. [Google Scholar]
27. Gan, Y.; Yang, B.; Li, Z.; Luo, J.; Gao, X.; Li, Y. Technical Points of Guigang Litchi High Grafting and Closed Orchard Transformation Technology. South. Hortic. 2024, 35, 57–60. [Google Scholar]
28. Li, Z.; Fan, G.; Liang, Z.; Niu, C. Workspace Analysis and Experiments of Orchard Platform Based on D-H Method. Trans. Chin. Soc. Agric. Eng. 2020, 36, 25–34. [Google Scholar]
29. GB/T 10000-2023; Human Dimensions of Chinese Adults. National Standards of the People’s Republic of China: Bejing, China, 2023.
30. GB/T 14172-2021; Bench Test Methods of Static Roll Stability for Motor Vehicles, Trailers and Combination Vehicles. National Standards of the People’s Republic of China: Beijing, China, 2021.
31. Liu, J. Frame Design and Optimization of an Orchard Picking Operation Platform. Master’s Thesis, Shandong Jiaotong University, Jinan, China, 2023. [Google Scholar]
32. Lee, S.; Kim, J.; Park, W. Structural analysis for the development of a vertically raise type aerial work machinery. J. Korea Inst. Inf. Electron. Commun. Technol. 2017, 10, 225–231. [Google Scholar]
33. Jiang, Y.; Sun, Z.; Wang, R.; Xia, C.; Ye, Q.; Guo, Y. Design and performance test of the omnidirectional leveling system for crawler work machine in hilly areas. Trans. Chin. Soc. Agric. Eng. 2023, 39, 64–73. [Google Scholar]
Li Z, Li C, Zeng Y, Mai C, Jiang R, Li J. Design and Realization of an Orchard Operation-Aid Platform: Based on Planting Patterns and Topography. Agriculture. 2025; 15(1):48. https://doi.org/10.3390/agriculture15010048
Перевод статьи «Design and Realization of an Orchard Operation-Aid Platform: Based on Planting Patterns and Topography» авторов Li Z, Li C, Zeng Y, Mai C, Jiang R, Li J., оригинал доступен по ссылке. Лицензия: CC BY. Изменения: переведено на русский язык

















































































































Комментарии (0)