Ключевые технологии в области интеллектуальной посевной техники для зерновых культур: последние достижения и перспективы
Эксплуатационные характеристики посевной техники для зерновых культур влияют на их урожайность и качество. В данной статье представлен обзор существующей литературы, посвященной интеллектуальным технологиям для посевной техники, включая активные управляемые высевающие аппараты, системы интеллектуального контроля нормы высева и системы контроля положения семени.
Аннотация
В настоящей работе (1) изложены характеристики и инновационные конструкции существующих высевающих аппаратов с электроприводом и механизмов копирования рельефа почвы; (2) описаны современные принципы обнаружения и применения датчиков свойств почвы на основе различных её характеристик; (3) обобщены подходы к определению оптимальной нормы высева на основе свойств почвы; (4) подробно изложено состояние исследований в области технологий измерения и контроля нормы высева; (5) описаны методы управления траекторией посевных машин и системы контроля глубины посева на основе принципов измерений и управления; и (6) представлены текущее состояние, ограничения и будущие направления развития интеллектуальной посевной техники для зерновых. В перспективе ожидается развитие более совершенных технологий слияния нескольких алгоритмов и данных с многочисленных сенсоров для определения свойств почвы, принятия решений по оптимальной норме высева, а также для контроля нормы высева и положения семени. Данный обзор не только освещает новейшие исследования в области интеллектуальных исполнительных, сенсорных и управляющих технологий для посевной техники, но и подробно обсуждает недостатки существующих интеллектуальных посевных технологий и будущие тенденции развития. Таким образом, этот обзор предлагает ориентиры для будущих исследований в области интеллектуальной посевной техники для зерновых культур.
1. Введение
1.1. Предпосылки и мотивация
Зерновые культуры относятся к семенам растений семейства злаковых, таких как пшеница, рис, кукуруза и просо. Зерновые являются ключевой частью продуктов питания во всем мире, так как они могут обеспечивать 50–80% тепловой энергии, 40–70% белка и более 60% витамина B1, необходимого населению мира [1]; следовательно, существует большой глобальный спрос на зерновые. Согласно официальной статистике Продовольственной и сельскохозяйственной организации Объединенных Наций (ФАО) [2], общая мировая посевная площадь под зерновые в 2022 году составила приблизительно 4,75 × 10^7 га, а урожайность зерновых — примерно 1,835 × 10^3 кг/га. Посевная площадь и урожайность зерновых как основной пищевой культуры должны неуклонно увеличиваться для удовлетворения потребностей населения мира.
Посев — одна из важнейших агрономических процедур в выращивании зерновых [3], а соответствующая норма высева может повысить продуктивность и качество роста зерновых [4]. Если норма высева зерновых ниже теоретической, вероятно, будут потрачены впустую земельные ресурсы. Кроме того, если норма высева зерновых превышает теоретическую, урожайность снизится из-за недостатка воды и питательных веществ. Поэтому точный контроль нормы высева зерновых имеет большое значение.
Распространенные методы посева зерновых включают разбросной посев [5], рядовой посев [6] и точный высев [7]. Разбросной посев предполагает ручное рассеивание семян по поверхности почвы с последующей заделкой разбросанных семян в почву [8]; хотя этот процесс прост в выполнении, достичь равномерного распределения семян сложно.
При рядовом посеве необходимо формировать борозды на равных интервалах, в которые затем помещаются семена зерновых. Рядовой посев, часто используемый для прямого посева пшеницы и риса, позволяет поддерживать стабильные междурядья и оптимальные условия вентиляции и освещения для семян. Дополнительно, он также облегчает проведение полевых работ, таких как междурядная обработка и защита растений [9,10]. Точный высев refers to размещение нескольких семян в лунки, расположенные на определенном расстоянии друг от друга в соответствии с заранее заданными параметрами междурядий и расстояниями между семенами. Точный высев способствует механизированному внесению удобрений и управлению посевами благодаря равномерному росту семян зерновых.
Для реализации вышеуказанных методов посева были разработаны различные типы посевной техники [11,12]. Семена в посевном аппарате высеваются с помощью высевающих аппаратов; однако в обычной посевной технике для привода высевающего аппарата используется система передачи цепи от опорно-приводного колеса, что не позволяет регулировать норму высева в зависимости от различных условий плодородия почвы [13]. Кроме того, рабочая глубина обычной посевной техники фиксируется после опускания с помощью навесной системы трактора и не может контролироваться в соответствии с рельефом почвы [14], что приводит к разной глубине посева и влияет на качество зерновых. В итоге, из-за отсутствия интеллектуальной системы мониторинга и контроля, обычная посевная техника не способна регулировать рабочие параметры в соответствии со свойствами почвы, положением семян и условиями эксплуатации [15], что в конечном счете влияет на урожайность зерновых и эффективность последующих агротехнических процессов.
Для оптимального управления процессом посева зерновых в обычную посевную технику были внедрены некоторые интеллектуальные системы и алгоритмы восприятия, принятия решений и управления [16,17]. Используя интеллектуальные технологии, современная посевная техника может контролировать норму высева в зависимости от плодородия почвы на месте, а также управлять положением и глубиной посева на основе траектории посева и давления сошника, позволяя размещать семена с идеальными расстояниями между семенами и междурядьями, а также на оптимальной глубине [18,19].
Цель данной статьи — обзор новейших интеллектуальных технологий, применяемых в области посевной техники для зерновых. Некоторые обзоры уже поясняли различия между картографическим и сенсорным сайт-специфичным посевом и подчеркивали важность алгоритмов слияния данных. Например, Šarauskis и др. [20] в основном сосредоточились на методах посева с переменной нормой (VRS) и их эффективности в различных полевых условиях. Munnaf и др. [21] рассмотрели технологии использования многочисленных сенсоров и слияния данных для методов сайт-специфичного посева. Данное исследование подчеркивает различные исполнительные механизмы, датчики и контроллеры, используемые в интеллектуальной посевной технике. Уникальность этого обзора заключается в описании того, как эти интеллектуальные технологии способствуют автоматическому и точному посеву зерновых, в то время как упомянутые обзорыfocus на том, как гибко изменять стратегии посева в соответствии с конкретными условиями различных регионов.
Кроме того, Du и др. [17] рассмотрели прогресс исследований в области технологий и оборудования для посева кукурузы с переменной нормой. Культуры, рассматриваемые в нашем исследовании, включают не только кукурузу, но и другие зерновые, такие как пшеница, рис, бобовые и просо. Поскольку технологии посева зерновых имеют определенное сходство, мы рассматриваем передовые интеллектуальные технологии для различных зерновых культур.
Учитывая приведенные выше сравнения, данная статья предоставляет более всесторонний обзор иfocus на технологиях интеллектуальной посевной техники, которые способствуют повышению точности и эффективности процессов посева. Хотя интеллектуальная посевная техника была всесторонне и глубоко изучена в предыдущих исследованиях в многочисленных странах по всему миру, и был предложен ряд интеллектуальных алгоритмов восприятия, принятия решений и управления для посевной техники, результаты исследований не были обобщены тщательно и систематически, что неблагоприятно для разработки последующих моделей интеллектуальной посевной техники. Поэтому мы рассматриваем соответствующие ссылки и исследовательские материалы с целью предоставить всесторонний обзор состояния исследований ключевых технологий в интеллектуальной посевной технике для зерновых.
1.2. Методы индексирования литературы
Литература, обобщенная в данном обзоре, была собрана путем поиска в базах данных Web of Science и EI Village. Мы ставили целью получить самые последние результаты исследований в области интеллектуальной посевной техники за последнее десятилетие (2014–2024 гг.), включая обзоры и научные статьи. Ключевые слова задавались в соответствии с содержанием каждого раздела.
Для Раздела 3 в поисковой системе были заданы темы: `{«высевающий аппарат» И «зерновые»}`, `{«посевной агрегат» И «пшеница» ИЛИ «рис» ИЛИ «кукуруза»}` и т.д. Для Раздела 4 были заданы следующие поисковые темы: `{«датчик влажности почвы»}`, `{«датчик питательных веществ почвы»}`, `{«норма высева» И «метод принятия решений»}`, `{«семя» И «оптоэлектронный» ИЛИ «пьезоэлектрический» ИЛИ «машинное зрение»}`, `{«норма высева» И «контроль»}` и т.д. Для Раздела 5 в поисковой системе были заданы запросы: `{«посевной агрегат» И «навигация»}`, `{«посевной агрегат» И «планирование траектории»}`, `{«посевной агрегат» И «управление траекторией»}`, `{«глубина посева» И «контроль»}` и т.д. Дополнительно, некоторые конкретные зерновые культуры, такие как пшеница, рис, кукуруза и бобовые, также были включены в поиск.
После систематизации в этот обзор вошли 255 статей и ссылок на продукты; среди них 246 статей были опубликованы в период с 2014 по 2024 год.
1.3. Структура рукописи
Оставшаяся часть данной рукописи структурирована следующим образом:
Раздел 1 разъясняет предпосылки исследования, мотивацию и методы индексирования литературы для ключевых технологий, используемых в интеллектуальной посевной технике для зерновых.
Раздел 2 описывает взаимосвязи между ключевыми технологиями интеллектуальной посевной техники для зерновых.
Раздел 3 знакомит с исполнительными механизмами высева, разработанными для интеллектуальной посевной техники для зерновых.
Раздел 4 рассматривает ключевые технологии для контроля нормы высева, такие как определение свойств почвы, модель принятия решений по теоретической норме высева, а также мониторинг и контроль нормы высева.
Раздел 5 предоставляет обзор технологий контроля относительного положения семени, при котором боковое и продольное положения семени контролируются трактором, а вертикальное положение контролируется с помощью техники управления глубиной посева.
Раздел 6 исследует влияние интеллектуальной посевной техники на различных масштабах земледелия.
Раздел 7 обсуждает современное состояние, ограничения и будущие тенденции развития технологий интеллектуального посева зерновых.
Наконец, Раздел 8 подводит итог всему обзору.
2. Взаимосвязь между ключевыми технологиями интеллектуальной посевной техники для зерновых
Конечная цель интеллектуальной посевной техники для зерновых — максимально использовать информацию о состоянии окружающей среды и работе машины для размещения определенного количества семян зерновых с желаемой нормой высева и относительным положением с использованием интеллектуальных технологий восприятия, принятия решений и управления [20]. Как показано на Рисунке 1, конечная цель может быть разделена на две подцели: а именно, достижение соответствующей нормы высева и точного положения семени [21,22]. Для достижения вышеуказанных подцелей необходимо использовать три ключевые технологии интеллектуальной посевной техники для зерновых: активные управляемые исполнительные механизмы высева, интеллектуальный контроль нормы высева и интеллектуальный контроль положения семени.
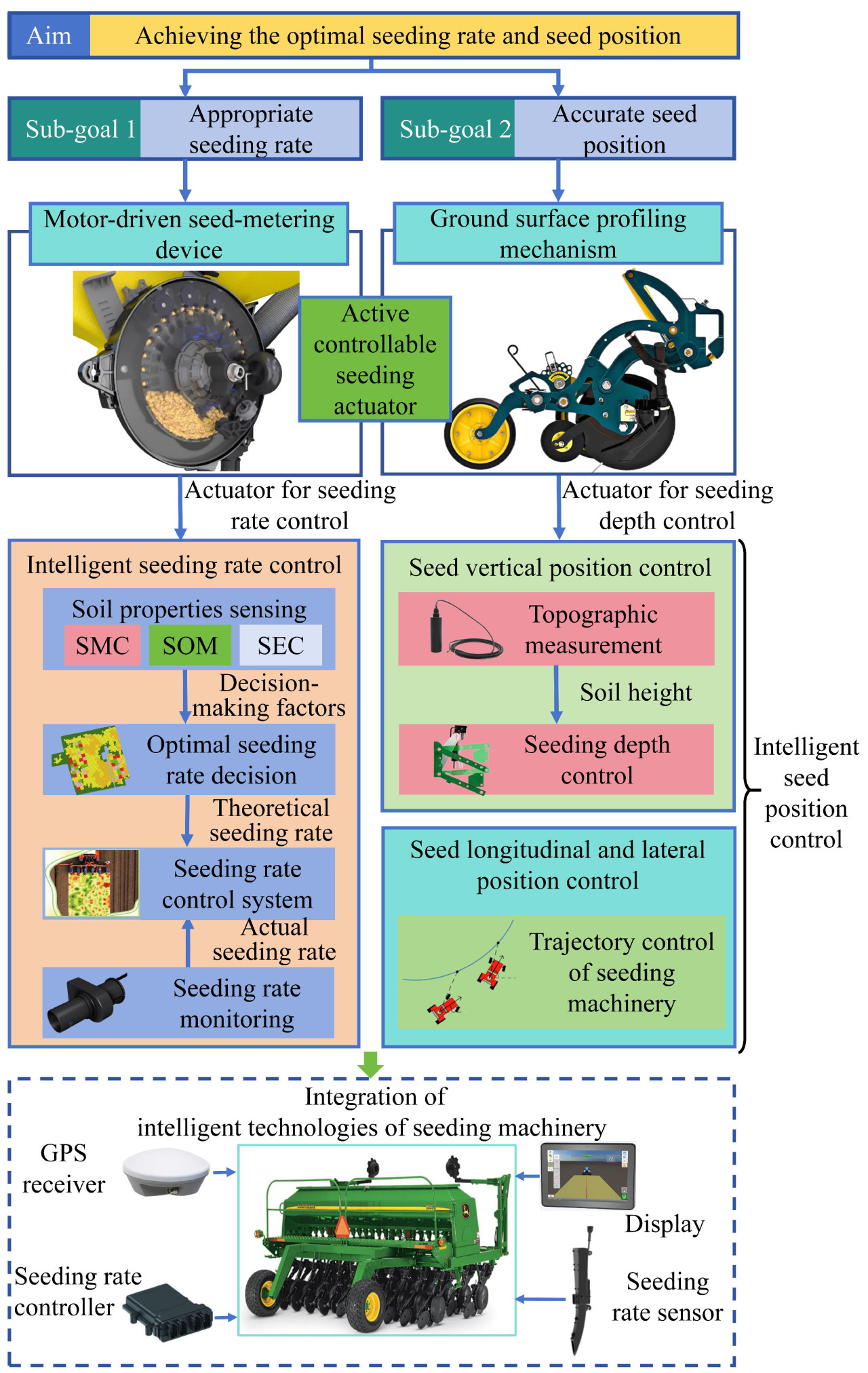
Рисунок 1. Схема взаимосвязей между интеллектуальными технологиями для посевной техники зерновых.
Как показано на Рисунке 1, общая цель — достижение оптимальной нормы высева и положения семени — может быть разделена на две подцели. Первая подцель involves достижение соответствующей нормы высева. Достижение соответствующей нормы высева требует разработки приводных высевающих аппаратов в качестве физической основы. Технология определения свойств почвы предоставляет факторы для принятия решений, такие как влажность почвы (SMC), содержание органического вещества (SOM) и электропроводность почвы (SEC), для моделей принятия решений по оптимальной норме высева. Теоретическая норма высева на участке, как основная цель системы интеллектуального контроля нормы высева, может быть определена с использованием технологии принятия решений по оптимальной норме высева. Технология мониторинга нормы высева затем используется для измерения фактических норм высева, служа обратной связью для системы контроля нормы высева.
Другая подцель — достижение интеллектуального контроля положения семени, который включает вертикальное, продольное и боковое положения. Вертикальное положение зависит от технологии контроля вертикального положения семени. Во-первых, механизмы копирования поверхности почвы, которые могут активно регулироваться с помощью гидравлической, пневматической или электрической системы, должны использоваться для разработки исполнительных механизмов для интеллектуального контроля глубины посева. Высота почвы измеряется с помощью технологии топографических измерений. Датчик топографии затем отправляет фактическую высоту почвы в систему контроля глубины посева, которая используется для регулировки вертикального положения семяпроводов. Дополнительно, если траектория посевного агрегата отклоняется от теоретического маршрута, то расстояние между семенами и междурядья будут нестандартными, как показано на Рисунке 2. Развитие посевной техники включает технологию управления траекторией и положением посевного агрегата. На основе вышеуказанных технологий высеваемые семена могут быть размещены в идеальных положениях.
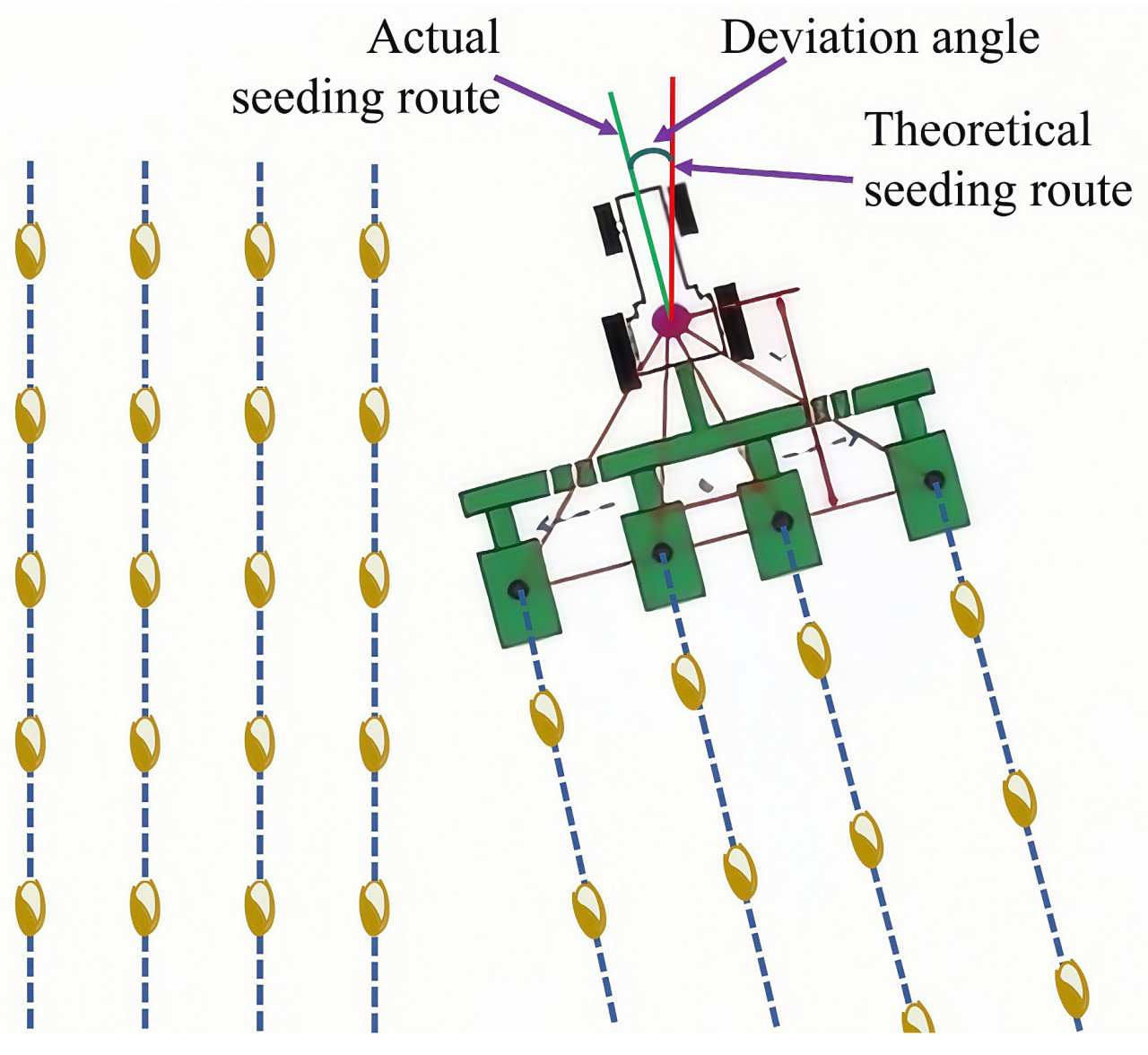
Рисунок 2. Схема отклонения маршрута посева.
Интеллектуальная посевная техника для зерновых может быть интегрирована на основе вышеуказанных активных управляемых исполнительных механизмов высева, систем интеллектуального контроля нормы высева и положения семени. На основе вышеупомянутых интеллектуальных технологий, интеллектуальная посевная техника может отслеживать информацию о почве и работе машины, чтобы определять оптимальную норму высева и приводить в действие высевающий аппарат для контроля норм высева в реальном времени в соответствии с определенной оптимальной нормой. Более того, техника интеллектуального контроля положения семени могла бы управлять продольным и боковым положениями семян путем регулирования траектории посевного агрегата, а также контролировать вертикальное положение в почве с помощью метода контроля глубины посева.
3. Активные управляемые исполнительные механизмы высева
3.1. Приводные высевающие аппараты (MDSDs)
Высевающие аппараты являются основными компонентами посевной техники, которые используются для разделения aggregated массы семян на равномерный и дискретный поток семян [23]. Упорядоченный дискретный поток семян не только обеспечивает желаемую урожайность и качество, но и значительно снижает трудности мониторинга и контроля за счет минимизации явлений пропуска и двойного высева [24,25]. Обычные высевающие аппараты приводятся в действие опорно-приводными колесами, пробуксовка которых может вызывать нестабильность скорости вращения высевающего аппарата. Следовательно, все большее количество посевных машин используют электрические двигатели для привода высевающих аппаратов. В процессе проектирования приводных высевающих аппаратов, поэтому, следует учитывать влияние двигателя.
Основываясь на источнике силы контакта между семенами зерновых и механическими структурами, MDSDs можно в первую очередь разделить на два типа. Один из них — механический высевающий аппарат, процессы заполнения, перемещения и высева семян в котором зависят от механических сил и гравитации [26,27]. Другой — пневматический высевающий аппарат, в котором семена втягиваются в отверстия под действием отрицательного давления воздуха и subsequently высеваются due to либо силы тяжести, либо положительного давления воздуха [28,29,30]. Типичные механические и пневматические высевающие аппараты показаны на Рисунке 3.
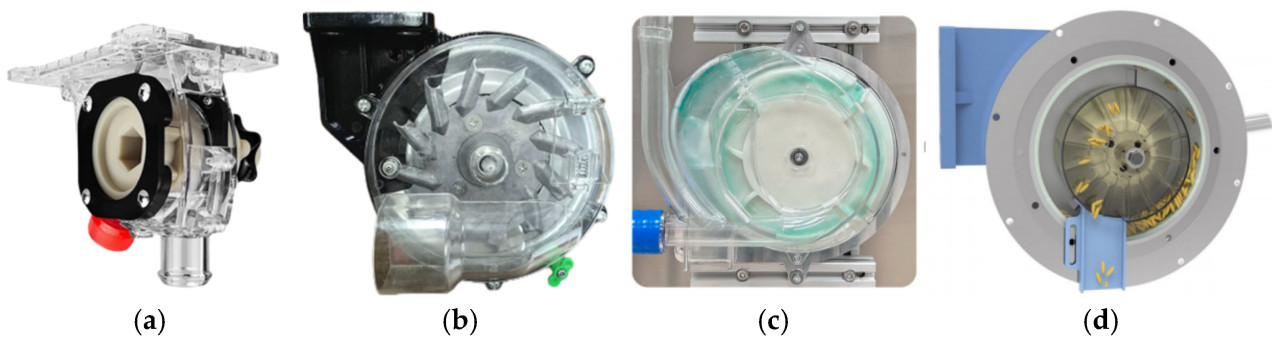
Рисунок 3. Типичные механические и пневматические высевающие аппараты. (a) Барабанный тип; (b) Катушечно-ложечный тип; (c) Двухкамерный пневматический; и (d) Сегментный пневматический.
В контексте интеллектуального посева, чтобы снизить трудность мониторинга и контроля потока семян, поток семян, высеваемый MDSD, предпочтительно должен быть как можно более точным и равномерным [31]. Равномерный поток семян может ослабить явление перекрытия, thereby снижая трудность мониторинга [32]. Дополнительно, большинство алгоритмов контроля посеваconsider, что количество семян, высеваемых за один оборот высевающего диска, является постоянным. Более того, если поток высева более равномерный, эффект контроля нормы высева будет лучше, и, следовательно, были предложены различные инновационные высевающие аппараты для повышения равномерности высева [33,34].
Что касается механических высевающих аппаратов, большинство исследований были сосредоточены на структурных инновациях и оптимизации параметров [33,35,36]. Были разработаны несколько инновационных высевающих аппаратов со смещенными зубьями, расположенными на периферии высевающего диска [26,27,37]. Смещенное расположение выступов позволяет заполнять, перемещать и высевать семена в alternate порядке. Когда одна ячейка завершает процесс высева, соседняя ячейка начинает высев семян. Конструкция со смещенными выступами может, therefore, способствовать снижению явления пропуска семян и улучшению равномерности высева.
В отличие от обычных высевающих аппаратов, для транспортировки и высева семян зерновых был предложен безвальный шнековый transmission устройство [38]. Шнековый транспортер может смягчать последствия вибраций и столкновений семян зерновых как во время процессов транспортировки, так и высева. Дополнительно, был разработан электромагнитный вибрационный MDSD для посева проса [39]. Максимальные коэффициенты вариации равномерности высева на ряд и общей равномерности высева составили 3,57% и 2,39% соответственно, а показатель повреждения семян был менее 0,5%.
Более того, был разработан высевающий аппарат ejection-типа, в котором высокоскоростные вращающиеся лопасти ускоряют семена и направляют их в почву [40]. Применение ejection высевающего аппарата не требовало сошников и семяпроводов, thereby снижая воздействие между семенами и посевным агрегатом.
Метод дискретных элементов (DEM) — это численный вычислительный подход, который можно использовать для моделирования поведения движения частиц в заданных обстоятельствах, который играет важную роль в структурной оптимизации MDSDs. Исследовательские процессы, используемые для структурной оптимизации MDSDs с помощью DEM, разъясняются ниже. Во-первых, форма и размер семян зерновых должны быть заданы или импортированы [41]. Затем необходимо откалибровать значения механических параметров от частицы к частице и от частицы к MDSD [42]. Более того, геометрические и кинематические параметры MDSD должны быть установлены и заданы в программном пакете EDEM. На следующем этапе процессы движения семян могут быть смоделированы в разделе симулятора. После получения результатов моделирования исследователи могут визуально анализировать параметры движения семян, такие как сила, крутящий момент и скорость. На основе этих параметров движения семян структура MDSD может быть оптимизирована до тех пор, пока семена зерновых не будут высеваться в соответствии с желаемыми параметрами [43].
Gao и др. [44] изучили влияние скорости подачи частиц, скорости подачи и угла элемента очистки семян на утечку и multiple высев высевающего аппарата. Они обнаружили, что при скорости вращения высевающего диска 194,5 об/мин и норме высева 14 семян/с можно обеспечить минимальное количество утечек и multiple высева. Dong и др. [45] провели DEM-моделирование для анализа влияния рабочих параметров на динамические характеристики семян, производительность заполнения и потребление энергии для кукурузного MDSD. Кроме того, Deng и др. [46] применили среднюю кинетическую энергию в качестве критерия оценки и использовали программный пакет EDEM для моделирования и анализа возмущений, вызываемых тремя типами высевающих дисков. Результаты показали, что при скоростях вращения от 1,16 до 3,49 рад/с MDSD demonstrated минимальное количество возмущений.
Пневматические высевающие аппараты commonly используются для точного высева [30,34,47]. Будучи направленными на повышение стабильности высева, были предложены некоторые новые пневматические структуры заполнения и очистки семян [29,47]. В частности, трапециевидное отверстие было incorporated в основание вставки отверстия, while выходное отверстие для воздушного потока было интегрировано в переднюю оболочку для облегчения как процессов заполнения семян, так и процессов очистки семян [48]. Более того, пневматический высевающий аппарат combined семенные ложки и воздушный поток для регулирования семян в stable положении во время процесса перемещения семян, thereby обеспечивая надежное удержание семян в высевающих отверстиях [46].
Существующие исследования пневматических MDSDs в основном focused на взаимодействиях между воздушным потоком и семенами зерновых. Метод вычислительной гидродинамики (CFD), thus, commonly интегрировался с DEM для оптимизации структуры и параметров fluid поля MDSD [49]. Wang и др. [50] разработали бесконтактное self-всасывающее устройство для shooting-посева пшеницы и выполнили CFD-DEM coupling моделирования для изучения производительности заполнения семян. Результаты моделирования показали, что когда скорость воздушного потока превышала 6,5 м/с, а скорость вращения была больше 800 об/мин, производительность заполнения семян могла соответствовать considered требованиям. Xing и др. [30] разработали двухкамерный пневматический MDSD и изучили детали движения и состояние семян риса в воздушном потоке с использованием технологии CFD-DEM. Наилучшая производительность высева разработанного MDSD была достигнута, когда скорость входящего воздуха составляла 3 м/с, угол входа 60 градусов, а скорость всасывающей пластины 20 об/мин.
Дополнительно, некоторые технологии транспортировки семян, такие как системы транспортировки под positive давлением [51] и high-скоростные ленточные конвейеры, были разработаны для повышения стабильности транспортировки высевающих аппаратов. Пневматическое устройство для транспортировки семян было разработано посредством анализов поля воздушного потока при различных структурных параметрах [49]. Воздушный поток под positive давлением помогает двум соседним семенам сохранять их первоначальный интервал после высева из MDSD. Основная проблема использования технологии транспортировки под positive давлением заключается в том, как избежать столкновений с семяпроводом. Поскольку семена, транспортируемые с помощью воздушного потока под positive давлением, имеют high скорость, траектория их падения трудно поддается контролю, и они могут ударяться о семяпровод. Разработка MDSDs, которые могут поддерживать точный и равномерный высев потока семян, закладывает solid основу для технологии интеллектуального контроля нормы высева.
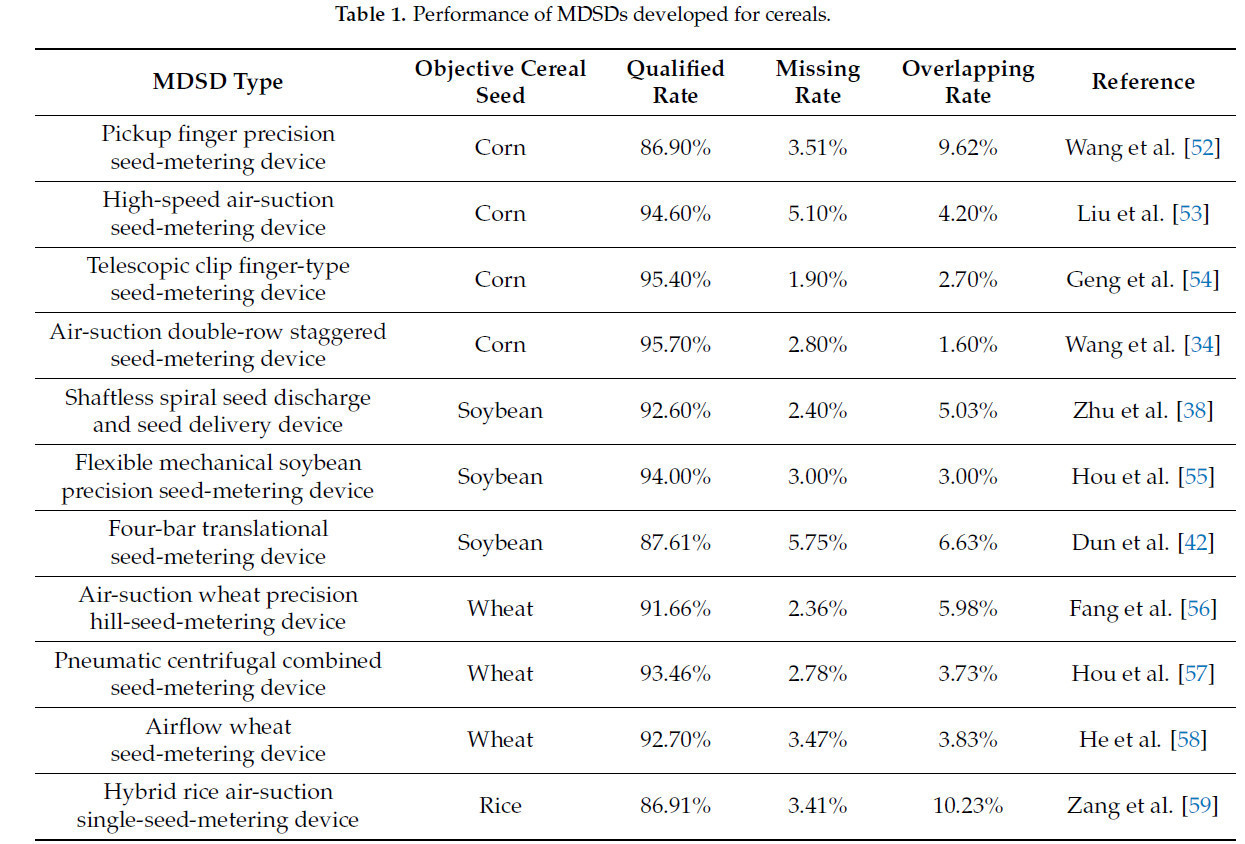
Некоторые исследования по MDSDs для зерновых перечислены в Таблице 1. Производительность MDSDs, разработанных для зерновых. Согласно данным, ориентированным на различные целевые семена MDSDs, можно наблюдать, что показатели качества MDSDs для кукурузы relatively high. Возможно, это связано с тем, что семена кукурузы имеют две плоские стороны, что означает, что их легко всасывать через отверстия высевающего диска. В contrast, MDSDs для пшеницы и риса имеют relatively низкие показатели качества из-за их small размеров и irregular формы.
3.2. Механизм копирования рельефа почвы (GSPM)
Неровная поверхность поля значительно влияет на вертикальное положение семяпроводов, что приводит к высеву семян на разной глубине [60]. Поэтому механизм копирования рельефа почвы, выступая в роли исполнительного механизма для систем интеллектуального контроля глубины посева, применяется для управления вертикальным положением семяпроводов.
Конструктивно механизмы копирования рельефа можно разделить на два основных типа: одноповоротные механизмы и механизмы с параллельным четырехзвенником.
Одноповоротные механизмы отличаются легкостью конструкции. Однако траектория движения семяпроводов в таких механизмах представляет собой дугу с центром вращения в шарнирном соединении [16, 61]. Нильсен и его коллеги применили одноповоротный механизм для контроля рабочей глубины посевной секции [60]. В их исследовании для создания давления на сошник использовалась фиксированная пружина. Результаты экспериментов показали, что такая система обеспечивала среднее отклонение глубины от заданной менее 0,2 мм.
Использование механизма с параллельным четырехзвенником позволяет обеспечить параллельность двух плоскостей и добиться строго вертикальной траектории движения. Именно эта конструкция нашла наибольшее распространение в современной посевной технике [62]. Ключевой момент при разработке такого механизма — создание параллелограмма между рамой агрегата и посевной секцией. Для этого верхние и нижние тяги должны иметь одинаковую длину и быть параллельны друг другу [63].
В традиционных механизмах копирования давление сошника на почву регулируется путем изменения длины пружины [64] — чем меньше давление, тем мельче глубина посева. Такой пружинный механизм не может активно регулировать величину давления в соответствии с конкретными полевыми условиями, что в итоге негативно сказывается на всхожести семян и развитии корневой системы [24].
Современные исследования в этой области уделяют все большее внимание активным механизмам копирования, в которые встроены активные исполнительные устройства — например, гидроцилиндр, электродвигатель [65], пневмоцилиндр [66] или магнитореологический амортизатор [67]. Это позволяет в реальном времени контролировать глубину посева, учитывая микрорельеф поля [68].
На Рисунке 4 представлены несколько распространенных конструкций механизмов копирования с различными приводами. Рисунок 4a показывает пассивный пружинный механизм. Он отличается простотой конструкции, высокой надежностью и широкой областью применения, а также прост в установке и регулировке. Однако пружина создает нестабильное давление на сошник, поэтому его предварительную настройку приходится проводить опытным путем перед началом работы. Рисунок 4b демонстрирует механизм с гидравлическим приводом. Он способен создавать большое усилие и имеет широкий диапазон регулировки. Благодаря высокому быстродействию он подходит для работы на высоких скоростях. Рисунок 4c иллюстрирует механизм с пневматическим приводом. Для его работы требуется внешний источник сжатого воздуха. Такие системы хорошо выдерживают высокие давления и вибрационные нагрузки, эффективно гася колебания. Рисунок 4d отображает механизм с электромеханическим приводом. Он обеспечивает высокую точность управления и быстрый отклик, но требует дополнительного источника электроэнергии во время работы.
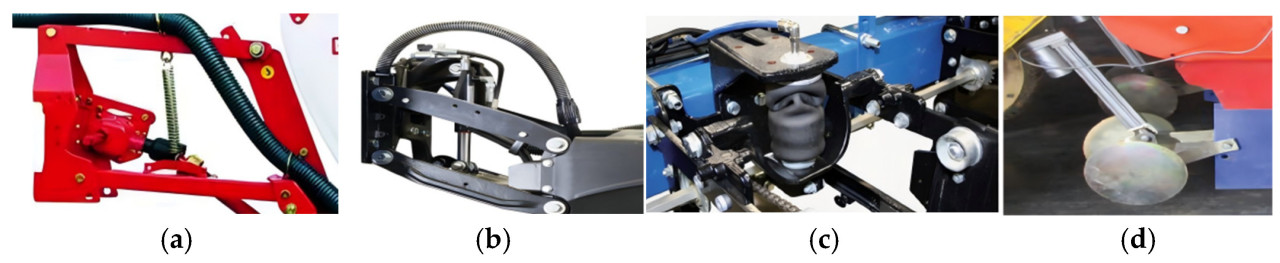
Рисунок 4. Механизмы копирования рельефа почвы с различными приводами: (a) пассивный пружинный; (b) с гидравлическим приводом; (c) с пневматическим приводом; и (d) с электромеханическим приводом.
Основываясь на предыдущих исследованиях, процесс разработки активного механизма копирования можно обобщить следующим образом.
1. Сначала создаются кинематические и динамические модели для определения структурных параметров механизма [69].
2. Затем могут быть разработаны модели контакта между копирующим колесом и поверхностью почвы для точной оценки деформации грунта [70].
3. После этого с помощью метода конечных элементов анализируются распределения напряжений и деформаций в конструкции, что служит основой для ее оптимизации.
4. Проводятся полевые испытания оптимизированного механизма для проверки его способности точно копировать рельеф.
5. На основе созданного механизма разрабатываются интеллектуальные алгоритмы для измерения микрорельефа и контроля глубины посева в реальном времени во время работы агрегата.
Хотя современные механизмы копирования в целом демонстрируют приемлемые результаты, перед ними по-прежнему стоят практические задачи. Наиболее серьезной проблемой остается снижение вибраций механизма в процессе работы, что требует дальнейшего углубленного изучения [71].
4. Интеллектуальный контроль нормы высева
4.1. Определение свойств почвы
Некоторые свойства почвы, такие как влажность почвы (SMC), содержание органического вещества (SOM), электропроводность (SEC), уровень pH и засоленность, могут влиять на прорастание, рост и здоровье семян зерновых [72]. Оптимальная норма высева должна, таким образом, определяться в соответствии с полевыми свойствами почвы для максимального использования потенциала обрабатываемого поля [21]. Более того, свойства почвы служат основой для определения нормы высева на определенном поле. Взаимосвязи между методами определения свойств почвы, моделями принятия решений по оптимальной норме высева и реализуемой посевной техникой показаны на Рисунке 5. Как наиболее ключевые свойства почвы, методы определения SMC, SOM и SEC рассматриваются ниже.
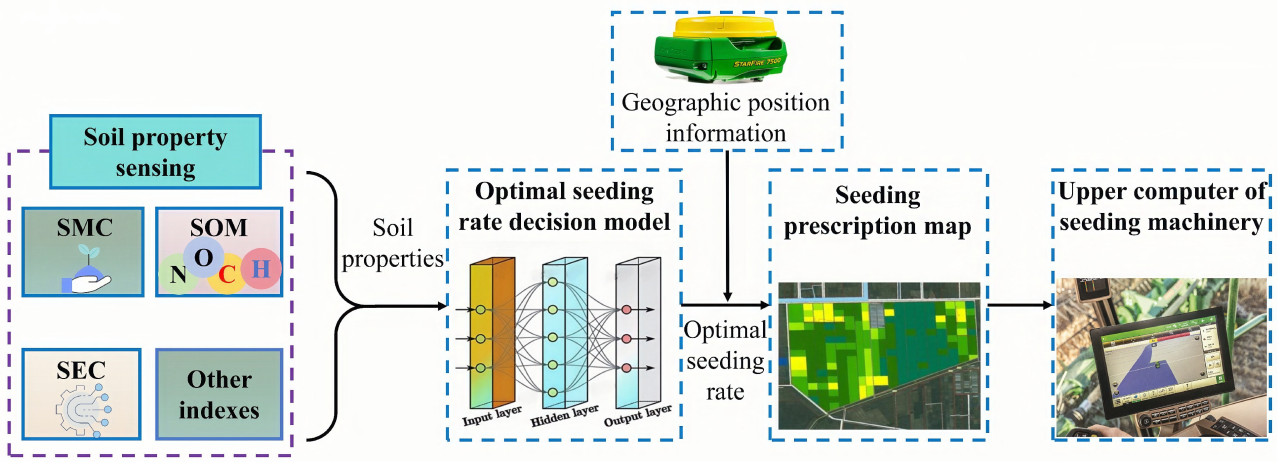
Рисунок 5. Взаимосвязи между методами определения свойств почвы, моделями принятия решений по оптимальной норме высева и реализуемой посевной техникой.
(1) Влажность почвы (SMC)
Влажность почвы (SMC) определяется как отношение веса воды, присутствующей в почве, к весу сухой почвы [73,74]. Недостаточная влажность может препятствовать прорастанию семян, поскольку чрезмерно сухие условия могут помешать семенам поглощать достаточное количество воды. И наоборот, переувлажненные почвы могут привести к загниванию семян из-за недостатка кислорода [75]. Поэтому необходимо регулировать оптимальную норму высева на основе SMC обрабатываемого поля; в этой связи эффективность и точность обнаружения датчика SMC имеют первостепенное значение.
Датчики SMC, использующие такие методы обнаружения, как частотная рефлектометрия [76], временная рефлектометрия (TDR) [77] и временная передача (TDT) [78], уже хорошо зарекомендовали себя на рынке, некоторые примеры показаны на Рисунке 6.

Рисунок 6. Коммерческие датчики SMC на рынке: (a) Датчик SMC Acclima TDR-315N; (b) Датчик SMC TEROS 12; и (c) Датчик SMC Acclima SDI-12 TDT.
Для повышения чувствительности и точности датчиков SMC исследователи применяли различные интеллектуальные материалы, такие как квантовые точки графена [79] и гибкая подложка из полиэтилентерефталата [80]. Двухзондовый датчик SMC был разработан на основе пористой среды, образованной спеканием смеси каолинита, порошка костного угля, порошка активированного угля и воды [81]. Когда один зонд нагревался, другой зонд использовался для обнаружения variations температуры. Поскольку SMC влияет на теплопроводность и удельную теплоемкость разработанных зондов, значение SMC может быть получено путем анализа изменений температуры.
Выходной сигнал датчика SMC обычно представляется в виде электрического сигнала. Связь между выходными сигналами датчика SMC и фактическими значениями SMC характеризуется как модель прогнозирования SMC. В большинстве случаев эти модели прогнозирования SMC разрабатываются с учетом постоянного типа и шероховатости почвы, что может compromize их надежность на практике [82]. Поэтому были разработаны комплексные модели прогнозирования SMC, основанные на многочисленных источниках информации, включая данные датчиков SMC, спутниковые снимки и аэрофотосъемку с дронов, для повышения точности и надежности обычных систем обнаружения SMC [83]. Например, данные двух частот от глобальной навигационной спутниковой системы были объединены для построения моделей оценки SMC на основе метода оценки компонента дисперсии Хельмерта (HVCE) [84]. Исследование показало, что метод слияния HVCE может значительно повысить точность модели прогнозирования SMC, особенно для моделей, основанных на методах машинного обучения.
Помимо вышеупомянутой модели слияния HVEC и машинного обучения, также были предложены несколько интеллектуальных моделей прогнозирования SMC, основанных на интеллектуальных алгоритмах. Модель регрессии случайного леса для прогнозирования SMC была разработана путем интеграции информации, полученной от радаров с синтезированной апертурой, оптических и тепловых инфракрасных устройств дистанционного зондирования [85,86]. Дополнительно, двунаправленный модуль нейронной сети с долгой краткосрочной памятью был применен для оптимизации модели прогнозирования SMC [87]. Кроме того, алгоритм фильтрации частиц использовался для захвата нелинейных зависимостей между тепловыми данными высокого разрешения, данными радиолокационного дистанционного зондирования и фактической SMC [88]. Эти исследования утверждали, что интеграция методов машинного обучения с многочисленными источниками данных обнаружения может значительно повысить надежность и точность обнаружения SMC.
(2) Органическое вещество почвы (SOM)
Органическое вещество почвы (SOM) — это стабильное полимерное органическое соединение, образующееся в результате разложения остатков растений и животных микроорганизмами [89]. Что касается его влияния на семена зерновых, SOM может обеспечивать питательные вещества, но также может способствовать развитию корневой системы у проростков зерновых. Чтобы максимально использовать SOM, оптимальная норма высева должна определяться на основе содержания SOM в обрабатываемом поле [90].
Обычные методы обнаружения SOM зависят от лабораторных химических анализов. В контролируемых условиях нагревания почвенный органический углерод окисляется с использованием дихромата калия в сернокислотном растворе. Оставшийся дихромат калия subsequently титруется стандартным раствором сульфата железа. Количество органического углерода then определяется путем применения коэффициента коррекции окисления к количеству потребленного дихромата калия. Этот метод химического анализа для обнаружения SOM имеет приемлемую точность, но он также требует много времени и затратен.
Чтобы сократить время и стоимость обнаружения, были предложены спектроскопические методы обнаружения, такие как спектроскопия в ближней инфракрасной области [91,92] и гиперспектральное дистанционное зондирование [93,94], благодаря их неразрушающему, быстрому и точному характеру [95]. Метод спектроскопии в ближней инфракрасной области позволяет точно идентифицировать полосы поглощения и коэффициенты отражения, связанные с элементами, атомными группами и соответствующими веществами в почве, с помощью комплексного анализа спектральных данных [96,97]. Данные диффузного отражения демонстрируют variations, которые коррелируют с fluctuations в SOM. Более того, эффект высокоспектральной технологии дистанционного зондирования для обнаружения SOM fundamentally зависит от взаимодействий между электромагнитным излучением и SOM [98].
Ключевой процесс в интеллектуальном дистанционном зондировании SOM — смоделировать регрессионную зависимость между фактическим содержанием SOM и значениями яркости многоспектральных изображений дистанционного зондирования [99]. Однако спектральные методы might быть подвержены влиянию размера частиц почвы, влажности, оксидов и других факторов [100,101,102]. Более того, Polonen и др. identified, что атмосферные облака могут значительно влиять на изображения, созданные с помощью методов гиперспектрального дистанционного зондирования [103].
Учитывая, что на точность обнаружения методов дистанционного зондирования SOM могут влиять оптические помехи, исследователи предложили машинные обонятельные системы с массивами газовых сенсоров в качестве ключевого источника информации. Эти системы использовались для обнаружения содержания SOM в пиролизном газе почвы [104] и, на основе обонятельных характеристик пиролизного газа почвы, были разработаны модели прогнозирования содержания SOM [105]. Для повышения точности нелинейной регрессии некоторые интеллектуальные методы, такие как алгоритмы поиска воробья, случайного леса и многослойного перцептрона, были интегрированы в модели прогнозирования SOM. Экспериментальные результаты выявили, что машинная обонятельная система в combination с моделями машинного обучения может обеспечивать желаемую прогностическую точность в контексте практического обнаружения SOM [105]. Современные массивы обонятельных датчиков SOM и оптические спектрометры видимого и ближнего инфракрасного диапазона (vis-NIR), которые можно использовать для обнаружения SOM, показаны на Рисунке 7.
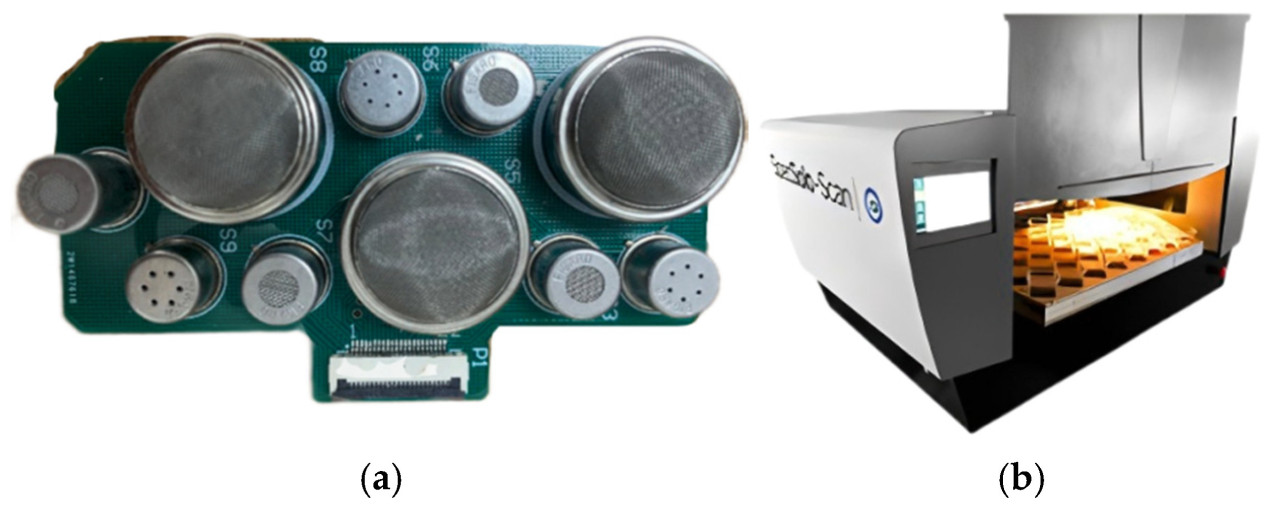
Рисунок 7. Типичные датчики с различными принципами обнаружения для определения SOM: (a) Обонятельный датчик SOM [106]; и (b) Оптический спектрометр Vis-NIR [107].
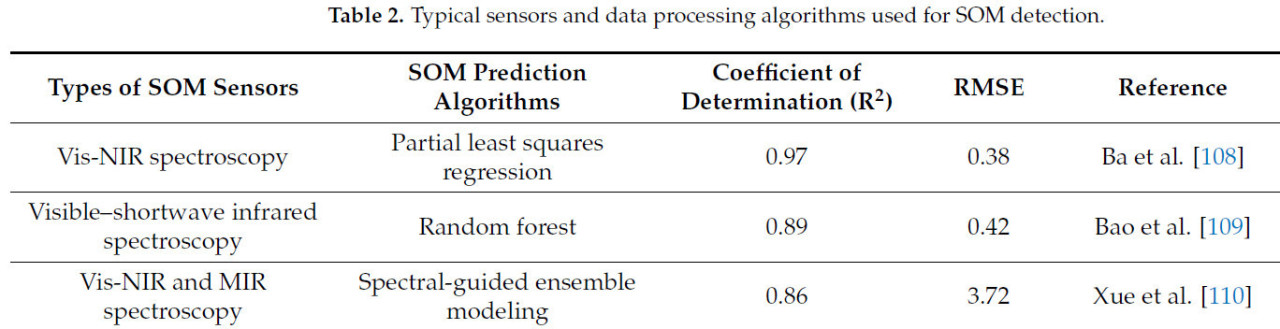
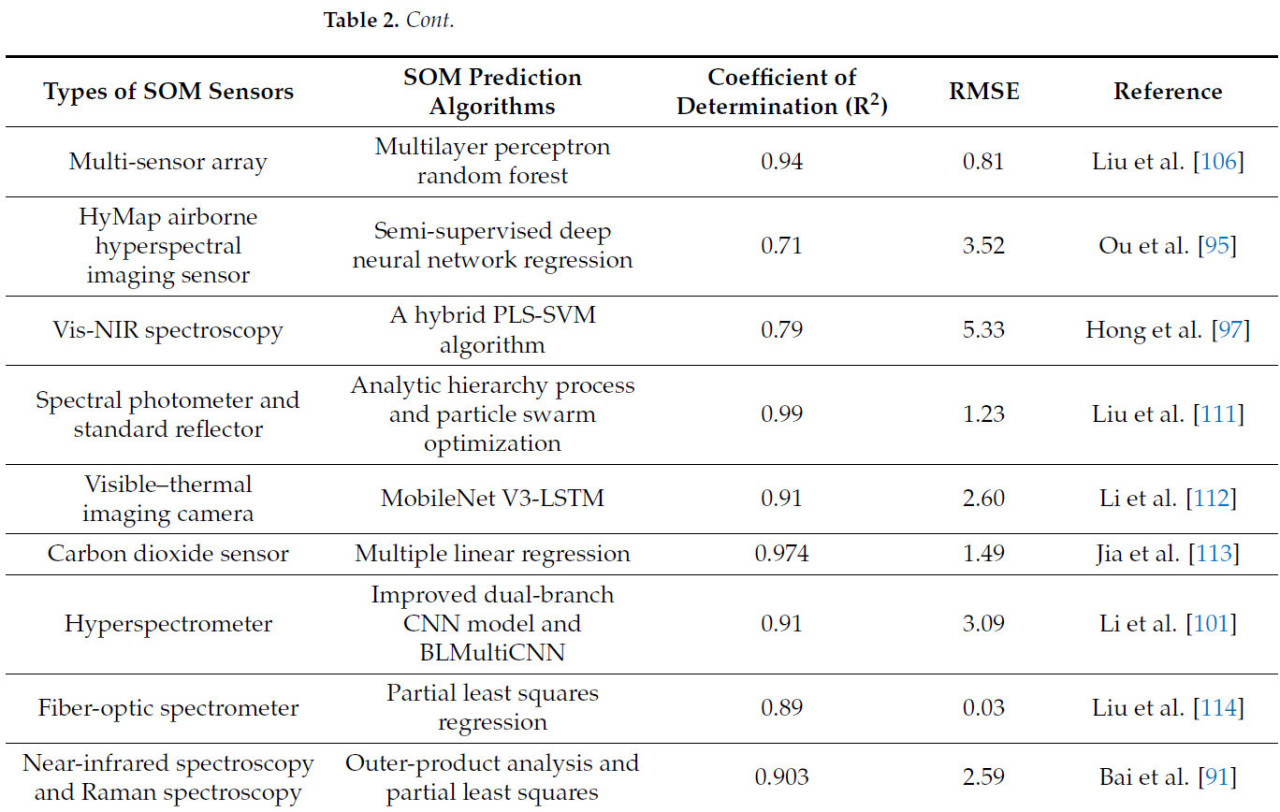
Двенадцать исследований по измерению SOM перечислены в Таблице 2. Типичные датчики и алгоритмы обработки данных, используемые для определения SOM.
Большинство из них показали relatively небольшие среднеквадратические ошибки (RMSE) и желаемые линейные зависимости. Сообщенные датчики SOM и алгоритмы прогнозирования могут предоставить ценные решения для последующих разработок.
(3) Электропроводность почвы (SEC)
Электропроводность почвы (SEC) напрямую отражает содержание смешанных солей в почве, причем такие факторы, как засоленность, влажность, температура, содержание органического вещества и текстура, также влияют на значение SEC. Значение SEC коррелирует со структурой почвы и SMC. В предыдущих исследованиях typically применялись полевые эксперименты для определения взаимосвязей между значениями SEC и урожайностью зерновых, и они представляли наиболее подходящую SEC для максимальной урожайности на экспериментальном поле. Что касается обнаружения SEC, обычно применяются методы электромагнитной индукции [115], временной рефлектометрии (TDR) [116] и токовые клеммы [117].
Для достижения измерения SEC в реальном времени advantageous установить датчики SEC на тракторах или посевных машинах. Типичной моделью датчика SEC, основанного на принципе электромагнитной индукции, является EM38 (Geonics Limited, Торонто, Онтарио, Канада), который имеет преимущество неразрушающего обнаружения. Однако на практике датчик SEC EM38 might подвергаться влиянию окружающей электроники, температуры почвы и других факторов; therefore, его необходимо калибровать перед каждым измерением [118]. Разработка бортовых датчиков SEC, thus, стала основным направлением в области интеллектуальной посевной техники [119,120,121]. Классический EM38 и некоторые коммерческие датчики SEC показаны на Рисунке 8.
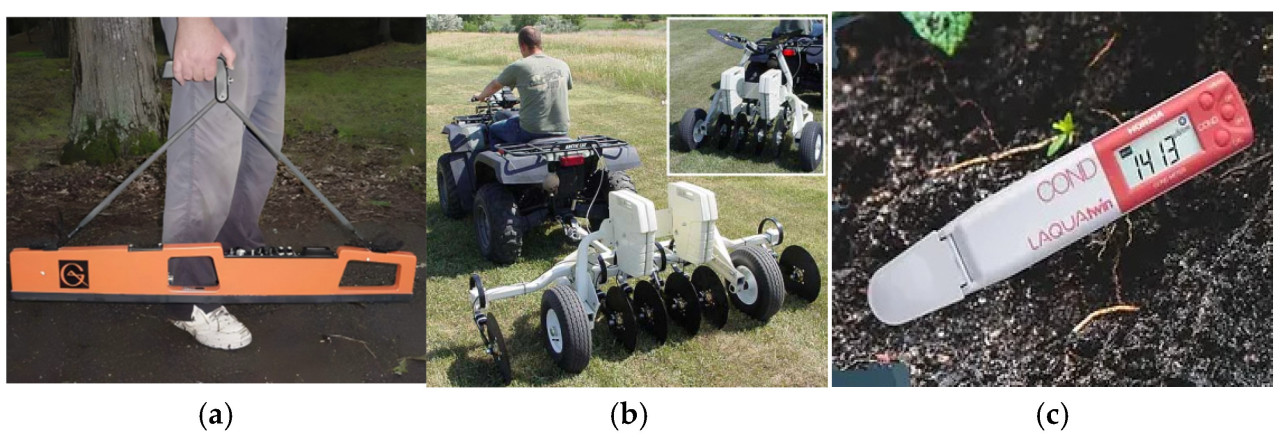
Рисунок 8. Некоторые коммерческие датчики SEC: (a) Датчик SEC EM38; (b) Бортовой датчик SEC VERIS 3100 [122]; и (c) Датчик SEC HORIBA LAQUAtwin EC-11 (HORIBA Advanced Techno, Co., Ltd., Киото, Япония).
Murata и др. разработали систему массива миллиметровых датчиков проводимости для измерения SEC в реальном времени, и для передачи значений SEC на посевную технику использовалась технология Интернета вещей (IoT) [123]. Han и др. разработали бортовую систему обнаружения SEC, использующую метод четырех клемм напряжения-тока [124]. Однако, поскольку метод токовых клемм является инвазивной техникой, точность измерений может быть снижена из-за нестабильного контакта между почвой и электродами [121].
Что касается моделей прогнозирования SEC, наиболее классическим является уравнение Арчи. Некоторые исследователи расширили сферу применения уравнения Арчи, увеличивая количество факторов, например, включая содержание воды и текстуру почвы [125,126]. Другие исследования вышли за рамки теории Арчи и применили машинное обучение в области обнаружения SEC. Было разработано портативное устройство с многочисленными датчиками для обнаружения SEC, и на основе устройства была установлена модель прогнозирования SEC с использованием нейронной сети обратного распространения ошибки [127]. Более того, в другом исследовании была предложена многовариантная модель с использованием радиально-базисной искусственной нейронной сети для прогнозирования SEC [128]. Соответствующие экспериментальные результаты показали, что точность моделей прогнозирования SEC, отрегрессированных с помощью алгоритмов машинного обучения, лучше, чем у тех, которые используют линейные или квадратичные модели [129].
В Таблице 3 мы обобщаем несколько исследований, focusing на измерении SEC, причем большинство из них показало приемлемые уровни производительности регрессии (R² более 0,8). Сообщенные датчики SEC и алгоритмы обработки данных могут предоставить ценные решения для последующей разработки датчиков SEC.
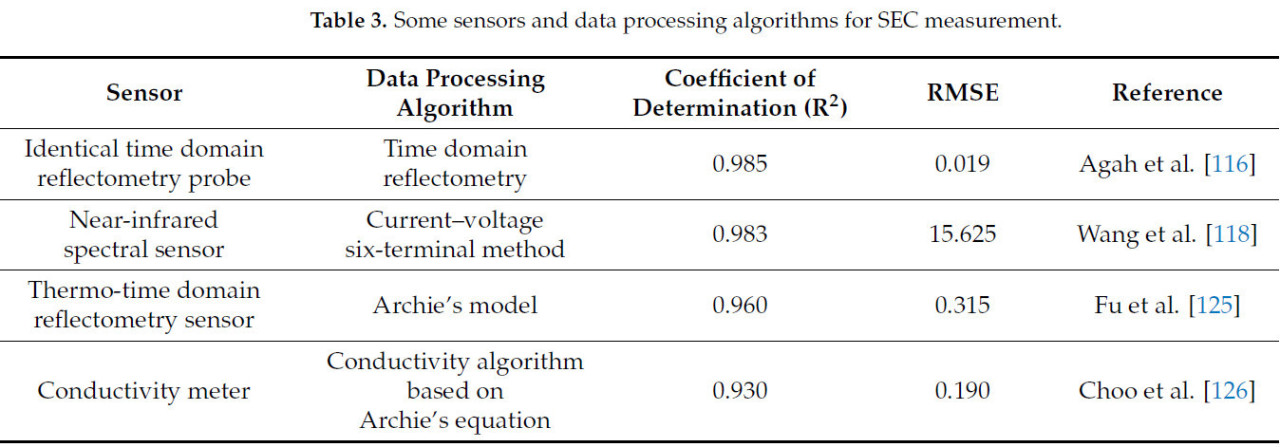
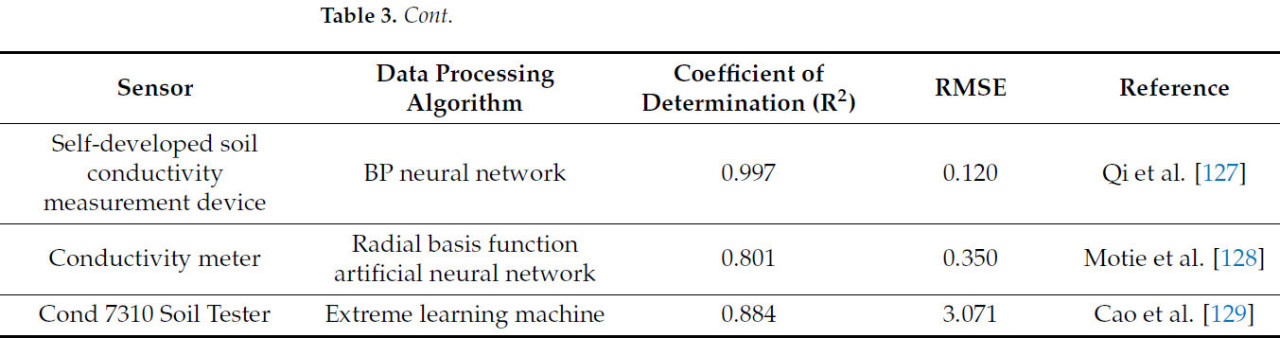
Таблица 3. Некоторые датчики и алгоритмы обработки данных для измерения SEC.
(4) Определение оптимальной нормы высева
Оптимальная норма высева refers to наиболее подходящее количество семян в specific условиях для достижения как желаемой урожайности, так и качества культуры. Основываясь на максимальном потенциале почвы, модель принятия решений по оптимальной норме высева может рекомендовать оптимальную норму высева для определенного поля. Общими входными данными для модели принятия решений по оптимальной норме высева являются свойства почвы и желаемая урожайность, а выходом модели решения является оптимальная норма высева [130].
В предыдущих исследованиях, сообщающих о модели принятия решений по оптимальной норме высева, mostly использовались экспериментальные методы [131,132], following которых на основе экспериментальных результатов могут быть установлены регрессионные модели между параметрами свойств почвы, нормой высева и урожайностью зерновых [133]. В последующих исследованиях проводились анализы дисперсии для прогнозирования оптимальной нормы высева [134,135]. Согласно предыдущим результатам исследований, урожайность initially увеличивалась, а затем уменьшалась с увеличением нормы высева при том же плодородии почвы, напоминая параболическую кривую [90]. Согласно пику кривой зависимости желаемой урожайности от нормы высева, была получена оптимальная норма высева в соответствии с плодородием почвы.
Обычные модели принятия решений регрессируются на основе предустановленных многовариантных линейных или нелинейных моделей [136,137]. Тем не менее, предустановленные многовариантные нелинейные модели могут не полностью отражать все нелинейные характеристики среди параметров свойств почвы, нормы высева и урожайности зерновых [138]. Следовательно, интеллектуальные алгоритмы нелинейной регрессии, такие как нейронные сети обратного распространения [138], случайный лес [90] и дерево решений [139], широко использовались для разработки моделей принятия решений по оптимальной норме высева. Модель принятия решений по норме высева была разработана с использованием алгоритма градиентного бустинга деревьев решений для выбора оптимальной нормы высева, моделируя реакции урожайности кукурузы на ряд значений содержания SOM и норм высева [90].
Прогнозируемая оптимальная норма высева может быть напрямую выведена на интеллектуальную посевную технику, но она также может быть объединена с информацией о географическом положении для формирования карт предписаний посева в географической информационной системе [140]. На карте предписаний посева соседние участки с аналогичными нормами высева объединяются и отмечаются одним цветом. Затем векторная диаграмма карты предписаний посева передается в главную систему управления интеллектуальной посевной техники перед посевной операцией.
Когда посевной агрегат перемещается по определенному полю, система интеллектуального контроля нормы высева будет регулировать скорость вращения вала высевающего аппарата в соответствии с оптимальной нормой высева. Карта предписаний посева считается ключевым связующим звеном между свойствами почвы и рабочими параметрами посевной техники [141]. Пример карты предписаний оптимальной нормы высева на основе исторического распределения урожайности показан на Рисунке 9.
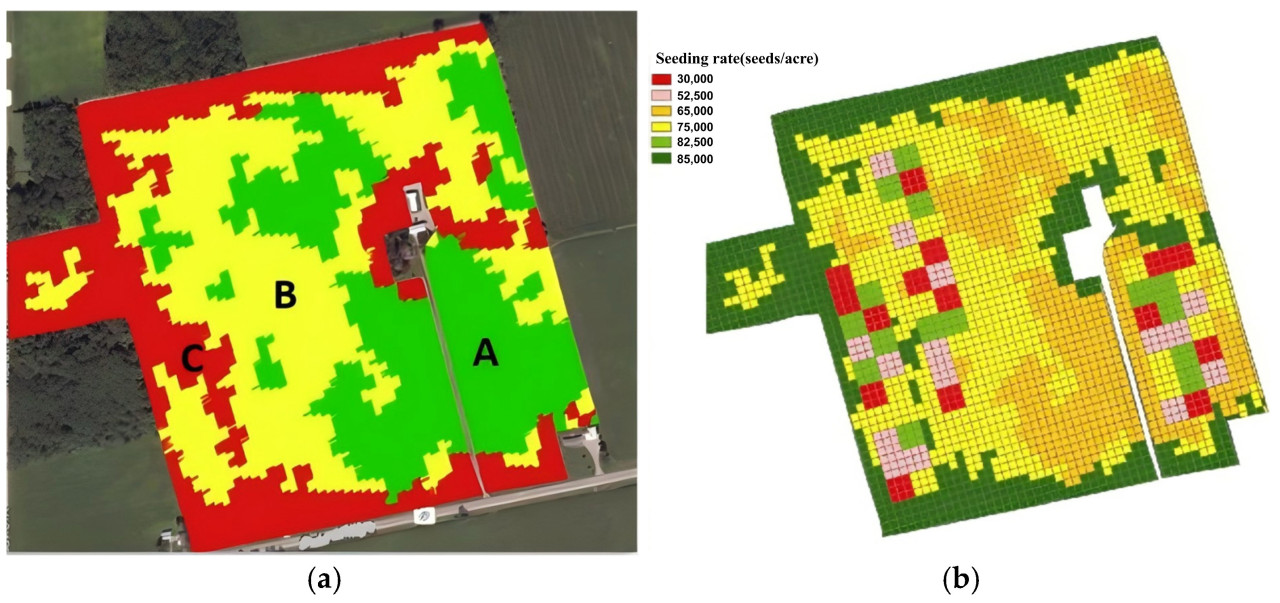
Рисунок 9. Историческое распределение урожайности и оптимальные нормы высева бобовых на одном поле [142]: (a) историческое распределение урожайности, и буквы A, B и C означают зоны высокой, средней и ниже средней урожайности соответственно. (b) Карта предписаний по оптимальной норме высева.
4.2. Техника мониторинга нормы высева
Норма высева refers to количество семян, высеваемых высевающим аппаратом на единицу площади. Цель системы контроля нормы высева — достичь фактической нормы высева, приближающейся к теоретической [143]. Блок-схема universal системы контроля высева показана на Рисунке 10.
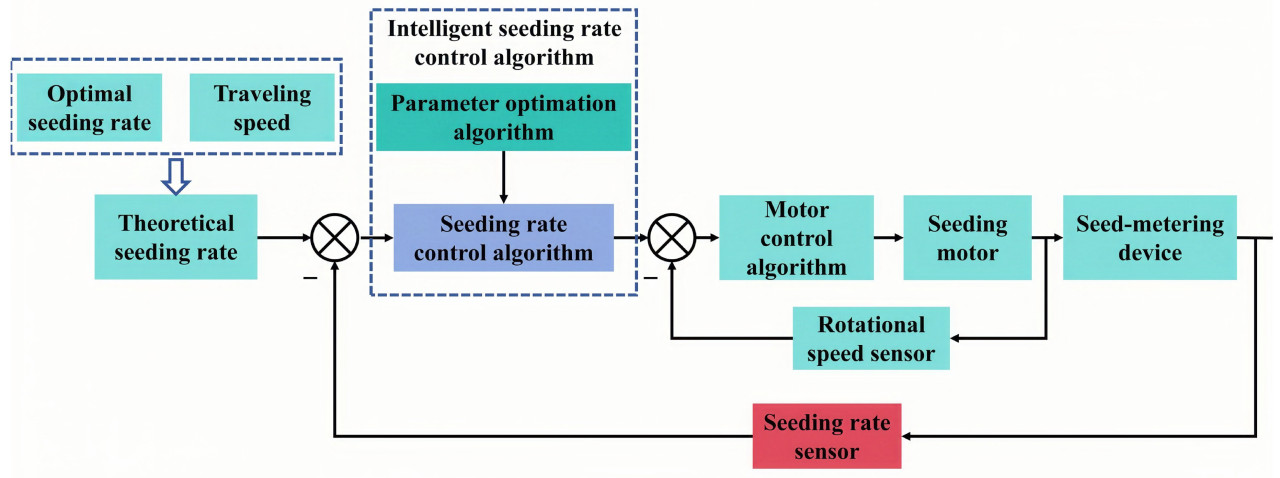
Рисунок 10. Блок-схема universal системы контроля высева.
Как один из ключевых компонентов системы контроля высева, датчик нормы высева используется для обратной связи фактических норм высева в систему интеллектуального контроля нормы высева [144,145,146]. Дополнительно, на основе временного интервала между двумя соседними семенами датчик нормы высева также может определять возникновение явлений пропуска или двойного высева [147,148]. В соответствии с принципами измерения, датчики нормы высева можно классифицировать на две категории; а именно, датчики косвенной оценки и датчики прямого измерения.
Некоторые коммерческие датчики нормы высева показаны на Рисунке 11. Рисунок 11a показывает датчик семян Hy rate plusTM LED, предназначенный для более крупных семян, с надежным фотоэлементом и оптическим пакетом для подсчета семян и мониторинга того, заблокирована ли семенная трубка или нет [149]. Рисунок 11b показывает фотоэлектрический датчик MC uni-seeder с оптимизированной оптикой, позволяющий различать семена в условиях high скоростей. Дополнительно, он exhibits good самoadaptivity, поскольку включает алгоритм, который может компенсировать наличие пыли или окружающего света [150]. Рисунок 11c показывает датчик нормы высева DS 2000i, предназначенный для подсчета падающих или выдуваемых семян в технике для точного высева [151]. Рисунок 11d показывает датчик PLANTirium, элемент формирования изображения high разрешения, позволяющий обнаруживать семена зерновых small размера [152], в котором метод распознавания образов используется для区分 мусора от семян внутри семяпровода. Рисунок 11e показывает датчик нормы высева типа MAXI-SEEDER-TIN, который использует фотоэлементы в качестве sensing элементов. Он может автоматически адаптировать порог срабатывания к уровню пыли, чтобы гарантировать long-срочную надежность [153]. Рисунок 11f показывает датчик семян WaveVision, который использует радиоволны для sensing через пыль [154].
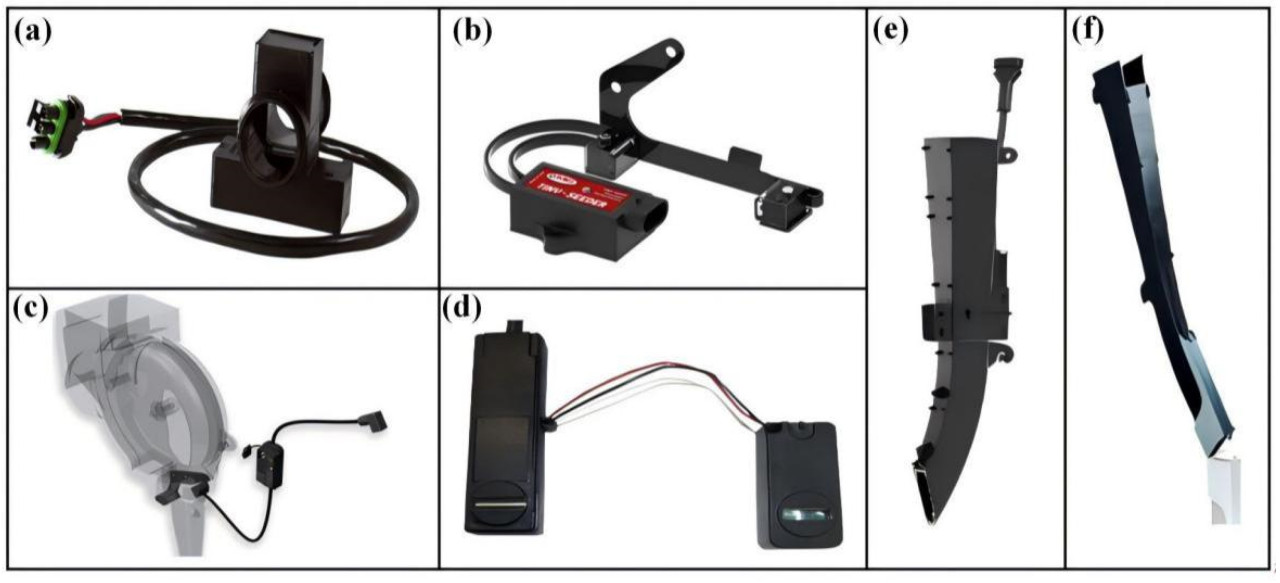
Рисунок 11. Некоторые коммерческие датчики нормы высева: (a) Hy rate plusTM LED; (b) MC uni-seeder photocell; (c) DS2000i high-rate; (d) PLANTirium; (e) MAXI-SEEDER TIN; и (f) WaveVision.
Метод оценки угла поворота (RASM) — это метод косвенной оценки. Принцип RASM заключается в измерении угла поворота вала высевающего аппарата для оценки нормы высева. В большинстве случаев энкодер или датчик Холла используется для измерения угла поворота вала высевающего аппарата [155]. RASM easy реализовать, но не может использоваться для оценки разницы в количестве семян при каждом обороте вала высевающего аппарата, поскольку RASM предполагает, что количество высеваемых семян за один оборот вала высевающего аппарата является постоянным. Дополнительно, некоторые неисправности, такие как отсутствие семян в бункере или закупорка семяпровода, не могут контролироваться с помощью RASM.
Чтобы преодолеть недостатки RASM, были разработаны датчики прямого измерения, включая пьезоэлектрические [156], емкостные [157] и фотоэлектрические [158,159] датчики. В предыдущих исследованиях пьезоэлектрические датчики использовались для обнаружения количества семян путем мониторинга impacts семян на пьезопленку [160,161]. Нормы высева ячменя и тритикале измерялись с помощью пьезоэлектрического датчика с применением алгоритма скользящего окна для выполнения определения количества семян [162]. Деформация пьезопленки может быть преобразована в электрический импульс. Количество электрических импульсов за единицу времени составляет норму высева [160]. Однако семена might отскакивать после столкновения с пьезоэлектрическим материалом, thereby вызывая подсчет одного семени более одного раза [163].
Принцип обнаружения для емкостных датчиков нормы высева заключается в том, что, когда семена проходят через емкостной датчик, диэлектрическая проницаемость диэлектрической среды между электродами изменяется, что приводит к variations емкости. Емкостные датчики нормы высева могут контролировать многочисленные семена при каждой выборке, поскольку диэлектрическая проницаемость диэлектрической среды чувствительна к количеству семян [164]. В предыдущем исследовании была повышена точность обнаружения емкостного датчика путем регулировки частоты дискретизации на основе нормы высева [144]. На практике было обнаружено, что емкостной датчик устойчив к пыли, но чувствителен к температуре, механической вибрации и паразитной емкости [165].
Фотоэлектрический датчик является наиболее prevalent технологией для измерения нормы высева. Фотоэлектрический sensing блок opposite-типа comprises передатчик и приемник [158,166]. Когда световой луч, излучаемый передатчиком, блокируется семенами, тень будет отбрасываться на поверхность приемника, что приводит к изменению выходного сигнала датчика [167,168]. Интеллектуальный алгоритм определения количества семян был разработан для обнаружения количества семян в соответствии с периодом времени прохождения семян через световой луч [169]. Быстрый отклик и high точность фотоэлектрических датчиков позволяют им получать приемлемые уровни производительности при измерении нормы высева. Однако точность измерений фотоэлектрического датчика нормы высева might быть подвержена влиянию пыли; thus, некоторые исследования предложили использовать самоочищающиеся устройства для повышения устойчивости к пыли [170]. Mussadig и др. [171] применили три алгоритма объективной идентификации, а именно CellProfiler, P-TRAP и SmartGrain, для подсчета семян зерновых с цифровых изображений. Семена пшеницы, ячменя, кукурузы, ржи, овса, сорго, тритикале и риса были протестированы в этом исследовании, и результаты показали, что CellProfiler является надежной программой анализа изображений для подсчета семян с цифровых изображений.
В Таблице 4 мы обобщаем 12 типов датчиков нормы высева, большинство из которых имеют точность измерения выше 90%. Эти принципы измерения и результаты могут предоставить ссылки для последующих исследований датчиков нормы высева.
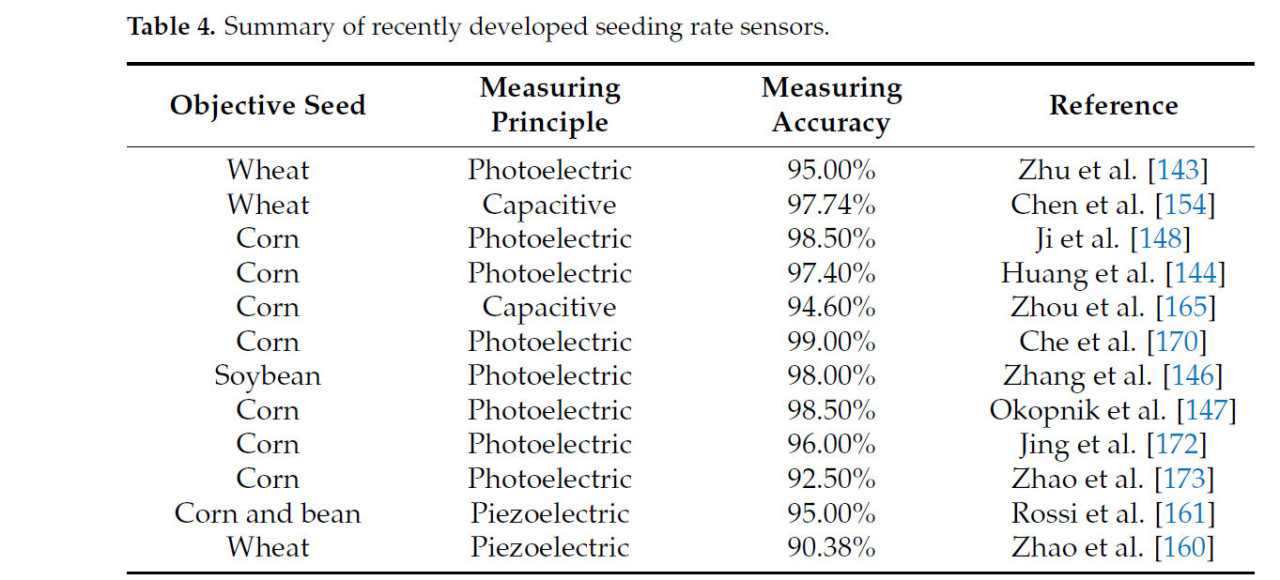
Таблица 4. Сводка недавно разработанных датчиков нормы высева.
Как видно из Таблицы 4, датчики нормы высева для семян кукурузы имеют relatively high точность измерений из-за размера семян кукурузы и режима точного высева. В contrast, поскольку семена пшеницы высеваются методом рядового посева, если фотоэлектрический принцип измерения используется для измерения семян пшеницы, более одного семени могут блокировать свет одновременно, что может привести к неправильным измерениям. Thus, точность измерения нормы высева для пшеницы relatively ниже, чем для кукурузы и сои при использовании фотоэлектрического принципа. Однако, поскольку емкостные датчики не подвержены влиянию многочисленных семян, они имеют relatively high точность измерения для нормы высева пшеницы.
4.3. Техника контроля нормы высева
Обычная посевная техника регулирует скорость потока высева с помощью механической transmission системы, которая поддерживает фиксированное соотношение между опорно-приводным колесом и высевающим аппаратом. Таким образом, высевающий аппарат might приводить к явлениям двойного высева или пропуска семян из-за пробуксовки опорно-приводного колеса. Для решения вышеупомянутых проблем некоторые исследователи разработали электрические системы контроля нормы высева (ESCSs), которые применяют датчики для мониторинга скорости движения посевной техники и используют электрический двигатель вместо механической transmission системы для привода высевающих аппаратов [174,175]. Некоторые коммерческие ESCSs показаны на Рисунке 12.

Рисунок 12. Коммерческая система контроля нормы высева: (a) DICKEY-john IntelliAg™ ISO6 ESCS [176]; (b) MC ESD2 ESCS [177]; (c) Ag Leader Seed Command ESCS [178]; и (d) NEW HOLLAND IntelliView™ IV ESCS [179].
На начальном этапе разработки ESCSs большинство ESCSs были системами с разомкнутым контуром [180]. Была разработана ESCS с разомкнутым контуром, которая может поддерживать линейную зависимость между скоростью вращения высевающего аппарата и скоростью движения посевной техники [181]. Из-за отсутствия обратной связи ESCS с разомкнутым контуром might подвергаться влиянию скорости двигателя, ошибок изготовления высевающих аппаратов и внешних возмущений, thereby приводя к возможности того, что норма высева становится неточной и нестабильной [182].
Чтобы преодолеть недостатки ESCS с разомкнутым контуром, энкодеры или датчики Холла могут использоваться для обратной связи скорости вращения высевающего аппарата в ESCS [183]. He и др. разработали ESCS, которая применяет энкодеры для мониторинга скорости вращения высевающих аппаратов, и они использовали алгоритм PID-регулятора для регулирования скорости вращения двигателя [184]. Их экспериментальные результаты продемонстрировали, что точность контроля нормы высева greatly улучшилась, поскольку разработанная ESCS значительно снизила нестабильности, связанные со скоростями двигателя [185]. Universal архитектура типичной ESCS представлена на Рисунке 13.
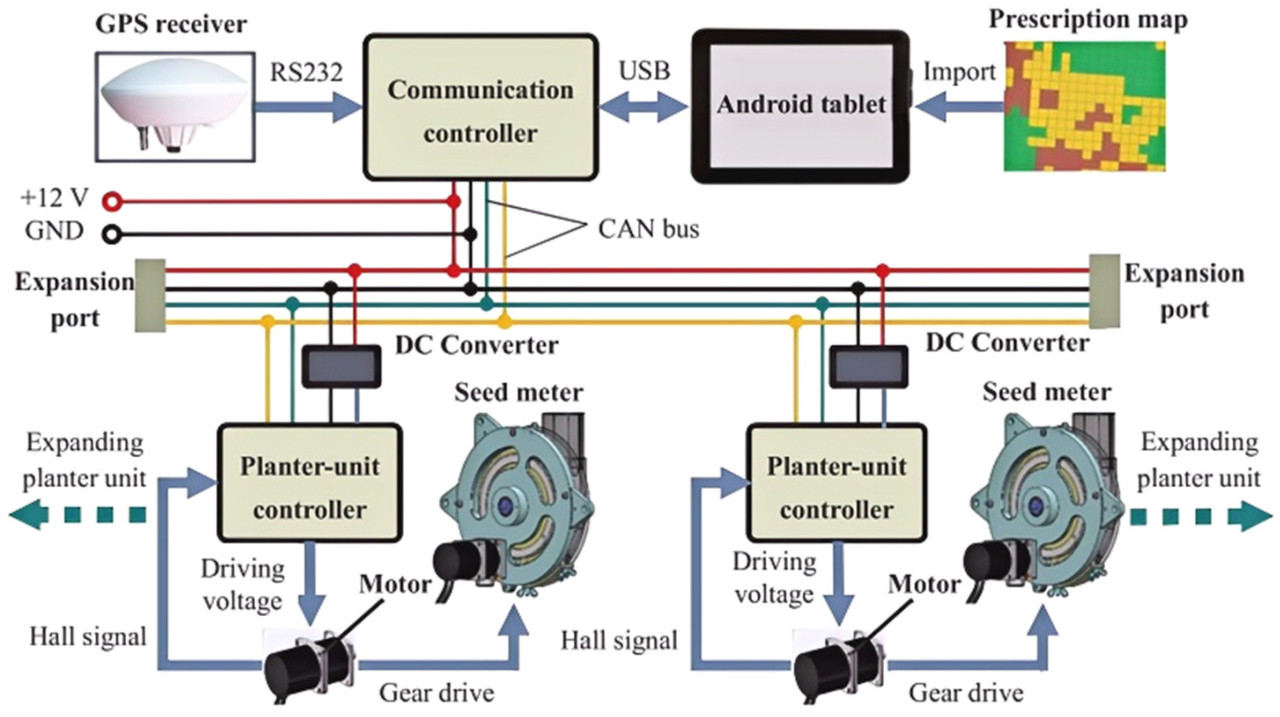
Рисунок 13. Universal архитектура типичной ESCS [184].
Некоторые интеллектуальные алгоритмы оптимизации, такие как оптимизатор серых волков [186] и нечеткий логический вывод [187], были применены для оптимизации параметров алгоритмов контроля нормы высева. Была разработана ESCS с алгоритмом PID-регулятора с dual замкнутым контуром (контур скорости вращения и контур тока) [188,189]. Пропорциональные, интегральные и дифференциальные параметры алгоритма PID-регулятора с dual замкнутым контуром могут самонастраиваться на основе модели нечеткого логического вывода. Используя алгоритм PID-регулятора с переменными параметрами, средний квалифицированный индекс ESCS составил 90,89%, а средний коэффициент вариации скорости двигателя был менее 10,0%.
ESCS, которая контролирует скорость вращения двигателя высева или высевающего аппарата, является типом системы управления с полузамкнутым контуром, поскольку она не передает обратную связь о фактических нормах высева. Если есть возмущения, влияющие на количество семян, высеваемых за оборот высевающего аппарата, система управления с полузамкнутым контуром не может контролировать и устранять эти возмущения. Следовательно, некоторые исследователи интегрировали датчики нормы высева в ESCSs, делая их системами управления с полным замкнутым контуром [190,191,192]. Liu и др. разработали датчик нормы высева на основе техники реконструкции потока семян, а затем интегрировали этот датчик нормы высева во встроенную ESCS [193]. Для повышения скорости отклика и надежности алгоритма управления была построена экспертная модель для настройки параметров алгоритма контроля нормы высева в реальном времени. Что касается ESCS с алгоритмом экспертной оптимизации, ее точность высева и коэффициент вариации составили 94,12% и 6,77% соответственно.
Некоторые ESCSs, разработанные в последние годы, обобщены в Таблице 5. Соответствующие конфигурации оборудования, алгоритмы управления и экспериментальные результаты могут служить ценными ссылками для последующих исследований.
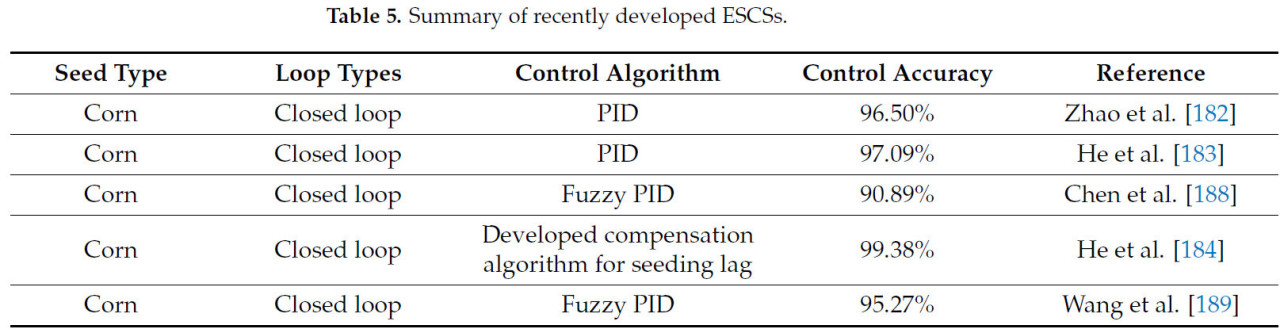
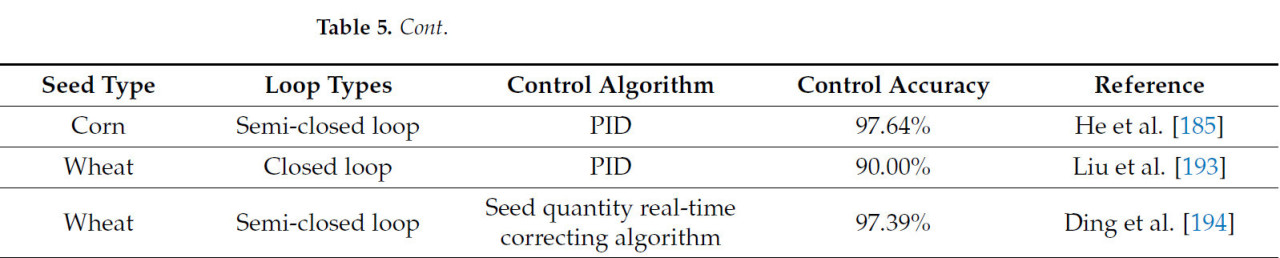
Таблица 5. Сводка недавно разработанных ESCSs.
5. Интеллектуальный контроль положения семени
5.1. Управление траекторией посевного агрегата
Точность траектории движения посевного агрегата имеет ключевое значение для достижения точного расстояния между семенами и междурядий [195]. Семена зерновых могут быть точно размещены с заданными расстояниями только тогда, когда посевной агрегат точно следует желаемой траектории. Поэтому в области интеллектуальной посевной техники все больше исследований сосредоточено на управлении траекторией посевного агрегата [196, 197].
Схема общей системы управления траекторией посевного агрегата показана на Рисунке 14. В настоящее время траектория посевного агрегата зависит от управления трактором. Методы, используемые для управления траекторией посевного агрегата, можно в основном разделить на три основных типа: кинематические [198], динамические [199] и безмодельные [200] методы.
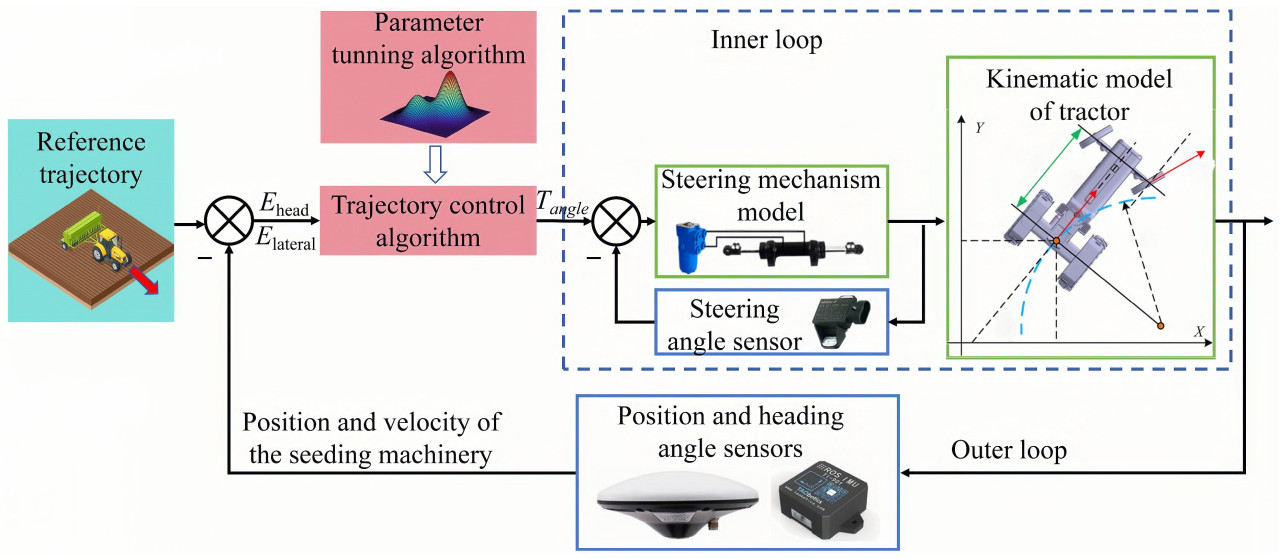
Рисунок 14. Схема навигации посевного агрегата.
Универсальные кинематические методы, включая метод "чистого преследования" (PPT), линейно-квадратичный регулятор (LQR) и метод прогнозирующего управления (MPC), особенно просты в реализации и, таким образом, получили широкое распространение [201]. Метод PPT выбирает ряд точек вдоль опорного пути в качестве точек упреждения, позволяя сельскохозяйственной технике следовать по designated пути, последовательно приближаясь к этим точкам [202, 203]. Как методы LQR, так и MPC выполняют обширную онлайн-итеративную оптимизацию для прогнозирования будущего поведения сельскохозяйственной техники [204, 205]. Метод LQR оптимально применим к линейным системам без жестких ограничений [206]. Хотя LQR также может использоваться для нелинейных систем через линеаризацию, это обычно ограничивается окрестностью specific рабочих точек системы.
Что касается метода MPC, ключевым является разработка моделей пространства состояний посевного агрегата. Subsequently, целевая функция и условия ограничений должны быть сформулированы в соответствии с посевной средой. Subsequently, должен быть создан контроллер MPC для прогнозирования будущей траектории посевного агрегата [207, 208]. Алгоритм MPC демонстрирует robust анти-помеховые возможности и high точность управления; однако его обширные итерационные вычисления делают его затратным по времени [205].
По сравнению с методами управления на основе кинематических моделей, алгоритмы отслеживания траектории движения на основе динамических моделей были разработаны для повышения точности управления и надежности. Среди этих динамических подходов алгоритм скользящего режима считается наиболее классической техникой [209, 210]. Для смягчения влияния неизвестных возмущений, некоторые нелинейные наблюдатели возмущений были построены в соответствии с динамическими моделями посевного агрегата, и наблюдаемые возмущения компенсировались алгоритмом скользящего режима [209]. В то время как метод скользящего режима показывает strong надежность и быстрый отклик, может возникать "дребезг" (чаттеринг), когда состояния системы пересекают поверхность скользящего режима, что негативно сказывается на качестве отслеживания сельскохозяйственной техники [211, 212].
Из-за трудности измерения certain параметров, таких как коэффициент трения между шиной и землей и распределение нагрузки на транспортное средство, разработка точной кинематической или динамической модели посевного агрегата все еще является сложной задачей. Поэтому все больше исследований сосредоточено на безмодельных методах управления траекторией, чтобы справиться с изменяющимися во времени и нелинейными характеристиками, присущими посевному агрегату [213, 214, 215]. PID-регулятор является наиболее prevalently используемым среди безмодельных подходов к управлению траекторией, поскольку его relatively легко реализовать на практике. Тем не менее, обычные PID-регуляторы имеют фиксированные коэффициенты, что означает, что они не адаптируются к полевой среде, характеризующейся изменяющимися во времени параметрами и внешними возмущениями [216, 217]. Чтобы устранить вышеупомянутые ограничения, были предложены нелинейные алгоритмы управления траекторией, которые интегрируют PID-регулятор и модели вывода коэффициентов [218]. На основе ошибки отслеживания и скорости изменения ошибки, модели нечеткого логического вывода могут идентифицировать оптимальные пропорциональные, интегральные и дифференциальные коэффициенты PID-регулятора в реальном времени.
Как неведущая система, движение посевного агрегата зависит от тяги, обеспечиваемой трактором [219], и положения высеянных семян зависят от траекторий семяпроводов. Большинство алгоритмов управления траекторией используются для управления траекторией центра трактора [220]. Однако фактические траектории движения семяпроводов отличаются от траектории центра трактора. Поэтому были предложены кинематические или динамические модели, включающие относительную взаимосвязь между посевным агрегатом и трактором (т.е. модели "трактор-прицеп") [221]. Эти модели используют ожидаемую траекторию посевного агрегата для определения траектории трактора, что более практично для контроля положения семян [222].
В Таблице 6 перечислены универсальные методы управления траекторией для интеллектуальной посевной техники, а также их сильные и слабые стороны. Также включены representative ссылки.
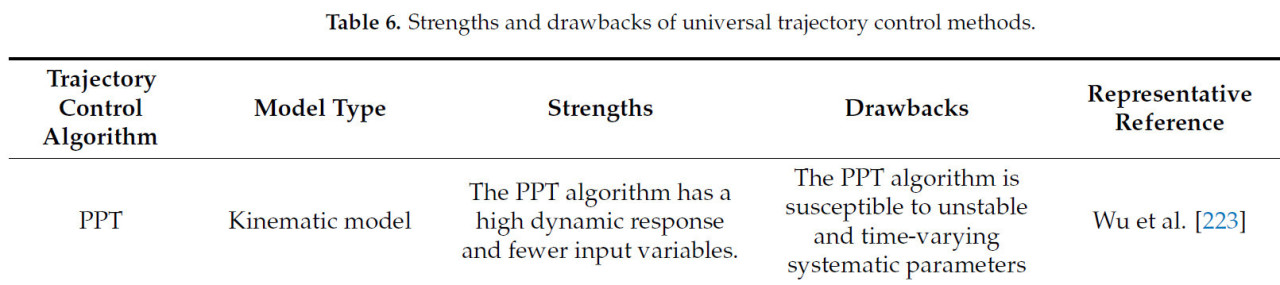
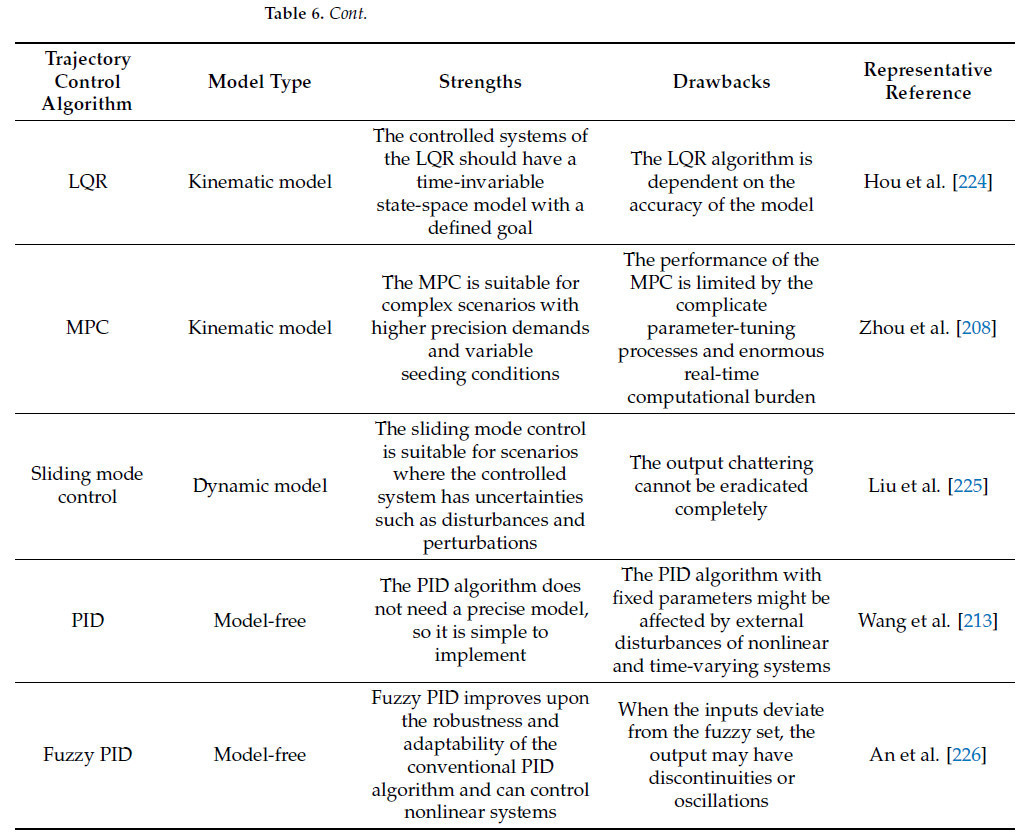
Таблица 6. Сильные и слабые стороны универсальных методов управления траекторией.
5.2. Интеллектуальный контроль глубины посева
Правильная глубина посева может улучшить способность семян зерновых сохранять воду и почву. Чтобы обеспечить равномерные всходы семян и максимально использовать свет, тепло и почвенные ресурсы, глубину посева необходимо точно контролировать. На основе разработанных активных GSPM были разработаны системы и методы контроля глубины посева для управления вертикальным положением семяпроводов [227].
Измерение топографии в реальном времени является необходимым предварительным условием для достижения точной глубины посева. Метод топографического измерения в основном включает геометрические методы измерения [228] и силовые методы измерения [229]. Геометрические методы измерения непосредственно измеряют расстояние от датчика до поверхности почвы [230]; например, ультразвуковые датчики [231, 232], инфракрасные лазерные датчики [233] и датчики угла [234, 235] обычно используются в геометрических методах измерения. Была предложена система слияния многочисленных датчиков для объединения информации, получаемой датчиками угла, ультразвуковыми и поворотными датчиками, установленными на посевном агрегате, с последующим использованием геометрической зависимости для оценки вертикального расстояния от рамы до семяпроводов [236].
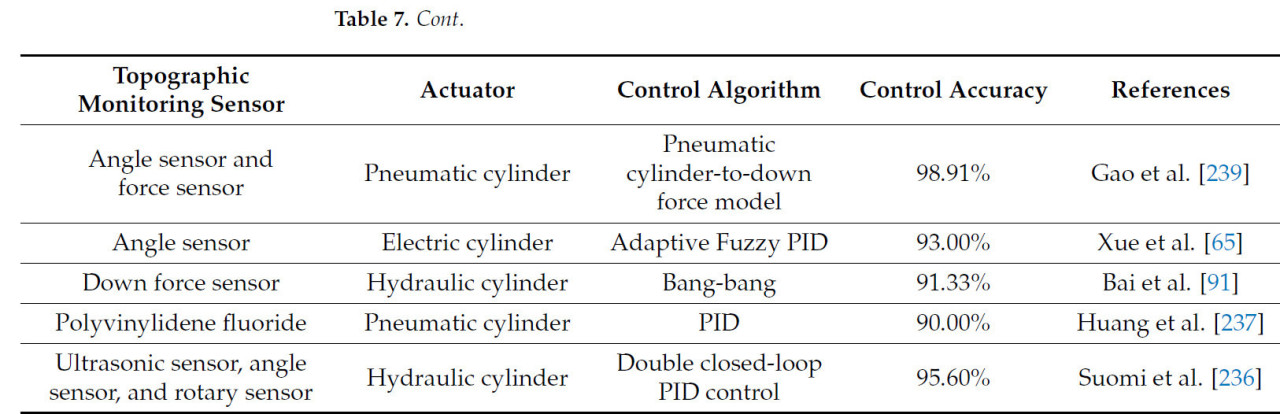
Силовой метод измеряет силу со стороны почвы, которая затем используется для оценки глубины посева в соответствии с откалиброванной моделью преобразования давления сошника и глубины посева. Для этой цели силовые датчики, такие как пьезоэлектрическая пленка из поливинилиденфторида (PVDF) [237], датчики изгиба [238] и датчики штифтов [239], устанавливаются на раме агрегата и измеряют реактивную силу от поверхности почвы. Afterwards, связь между выходным сигналом силового датчика и фактической глубиной посева устанавливается с помощью калибровки. В качестве universal метода контроля глубины посева, блок-схема системы контроля гидравлического давления сошника проиллюстрирована на Рисунке 15.
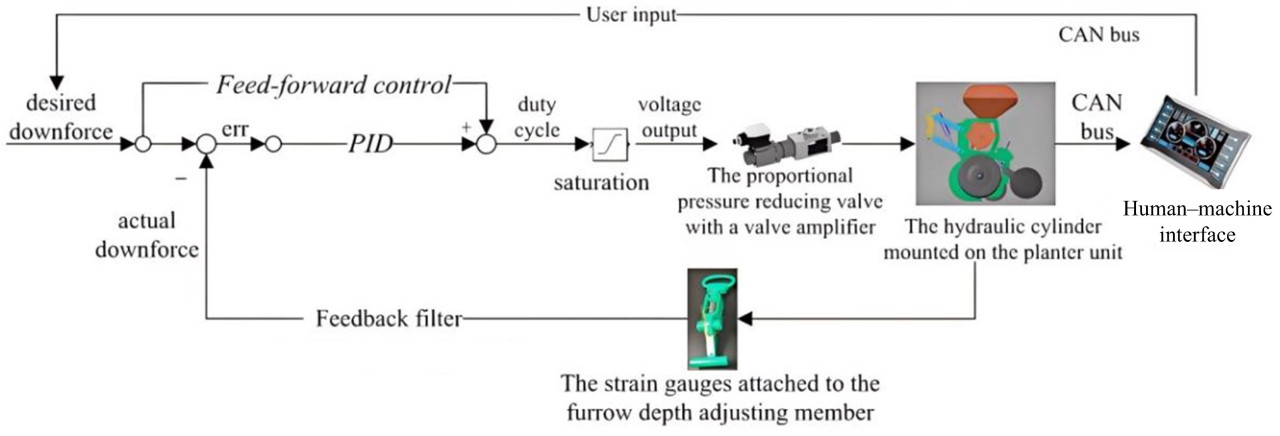
Рисунок 15. Universal блок-схема системы контроля гидравлического давления сошника [240].
Что касается исполнительных механизмов, гидроцилиндры могут обеспечивать достаточное усилие для привода GSPM, а пропорциональные направленные клапаны используются для контроля подъема или опускания семяпроводов путем изменения направления потока масла. Гидравлическая система контроля глубины посева была разработана для контроля глубины сошника и создания стабильного семенного ложа [60]. В частности, трехпозиционная гидравлическая система управления была определена как наиболее экономически эффективное решение, отличающееся быстрым временем отклика по сравнению с пропорциональным управлением и пропорционально-интегрально-дифференциальным управлением. Subsequently, чтобы повысить стабильность гидравлической системы управления, контроллер был разработан по каскадному принципу, где внутренний контур управляет положением подъемного цилиндра, а внешний контур регулирует глубину посева.
Помимо гидравлической системы управления, пневмоцилиндры также могут использоваться для контроля глубины посева. Пневмоцилиндр закреплен на connecting rod, и разработанная пневматическая система управления приводит в действие connecting rod для подъема или опускания семяпроводов путем контроля внутреннего давления пневмоцилиндра [239]. Датчик на основе PVDF пьезопленки применялся для измерения величины деформации шины, позволяя пневматической пружине контролировать давление на грунт на основе деформации, полученной от PVDF [237, 241].
Для повышения скорости отклика и надежности систем контроля глубины посева были приняты интеллектуальные алгоритмы. Гидравлическая система управления с нечетким адаптивным PID-алгоритмом управления использовалась для контроля давления сошника, создаваемого опорным колесом, которое контролирует толщину почвы между семенами и поверхностью почвы.

В Таблице 7 мы обобщаем несколько типов систем и методов контроля глубины посева, где все их точности контроля выше 90%. Эти методы исследований и результаты могут служить ссылками для дальнейших исследований систем контроля глубины посева.
6. Влияние интеллектуальной посевной техники на различных масштабах земледелия
В этом разделе сравниваются применяемые модели, затраты и выгоды, практические проблемы и решения, связанные с интеллектуальной посевной техникой на различных масштабах земледелия, а именно: крупномасштабное коммерческое растениеводство и растениеводство мелких фермеров.
6.1. Модели применения
Крупные коммерческие фермы часто используют крупную интеллектуальную посевную технику с системами GPS-навигации для посева зерновых. Этой крупной посевной техникой можно управлять с помощью сенсорного экрана в кабине трактора. Дополнительно, техника может автоматически измерять фактическую норму высева и глубину посева с помощью датчиков, позволяя контролировать их в соответствии с измеренными значениями.
В contrast, мелкие фермеры обычно используют небольшую интеллектуальную посевную технику с менее чем 12 посевными units. Эта небольшая посевная техника обычно имеет менее сложные технологии и доступна по relatively низкой цене. Universal посевная техника для посева на небольших полях typically включает приводные высевающие аппараты, системы контроля скорости вращения высевающих аппаратов и пассивные механизмы копирования рельефа почвы. Без дорогостоящих датчиков свойств почвы, небольшая посевная техника высевает семена с фиксированной нормой высева, установленной оператором.
6.2. Затраты и выгоды
Использование интеллектуальной посевной технологии способствует обеспечению равномерного размещения семян зерновых, thus повышая урожайность и качество зерновых. Bullock и др. [244] применили технологию принятия решений по оптимальной норме высева для получения теоретической нормы высева и использовали технику для посева с переменной нормой для высева семян зерновых с theoretical скоростью. Их результаты показали, что в зависимости от различных свойств почвы, норма высева семян кукурузы колебалась от 44 000 до 104 000 частиц на гектар. Благодаря применению технологии определения свойств почвы и технологии принятия решений по норме высева, максимальная урожайность увеличилась до 18,3 Мг на гектар. Более того, используя технологию контроля нормы высева, фермеры могли увеличить свой доход на 12 долларов США за гектар по сравнению с тем, когда применялись обычные методы посева [20].
Кроме того, благодаря использованию технологии контроля нормы высева, затраты могут быть снижены за счет уменьшения doubly засеянных полей; в частности, поскольку высевающие аппараты могут управляться индивидуально, области с двойным посевом могут быть избежаны. Дополнительно, технология контроля нормы высева может сэкономить 4,3% семян, а также повысить урожайность зерновых на 17% за счет снижения потерь урожая. Экономия затрат, связанная с внедрением интеллектуальной посевной технологии, составляла от 4 до 26 долларов США за гектар, в зависимости от распределения типов полей в farming операции [245].
Что касается качества роста зерновых, Dong и др. [246] применили интеллектуальную технологию контроля нормы высева для регулирования норм высева. Их экспериментальные результаты показали, что когда норма высева контролировалась точно на уровне 3400 семян на лоток, качество роста риса было самым высоким, при этом средняя выполненность увеличилась на 0,18, а индекс силы проростков увеличился на 0,42 на одно растение.
Согласно приведенным выше анализам, технологии интеллектуальной посевной техники могут распределять семена с желаемым расстоянием между семенами, междурядьями и глубиной посева, и последующие high урожайность и качество зерновых позволяют фермерам получить лучшую прибыль. Если крупная сельскохозяйственная компания планирует выбрать интеллектуальную посевную технику, рекомендуется установить передовые активные управляемые исполнительные механизмы, а также системы интеллектуального контроля нормы высева и положения семени, учитывая large масштаб сельскохозяйственной площади и long время работы. Таким образом, использование более дорогой интеллектуальной посевной техники может позволить получить более высокую прибыль. Однако, если мелкий фермер хочет купить интеллектуальную посевную технику, чтобы сбалансировать стоимость и производительность, рекомендуется интегрировать в посевную технику по крайней мере систему интеллектуального контроля нормы высева. Таким образом, прибыль может быть максимизирована при малых затратах.
6.3. Практические проблемы
Крупные коммерческие фермы становятся все более склонными к применению передовой интеллектуальной посевной техники в своих практических посевных операциях. Однако, поскольку до сих пор не существует стандартного протокола передачи данных для сельскохозяйственной техники, существующие интеллектуальные посевные машины несовместимы с другой сельскохозяйственной техникой и системами управления фермерским хозяйством, а также имеют низкий потенциал масштабируемости из-за использования новых компонентов.
Что касается мелкомасштабной посевной деятельности, стоимость современных интеллектуальных сеялок, как правило, высока, что делает их существенным расходом для большинства мелких фермеров. Более того, даже если мелкие фермеры могут позволить себе интеллектуальную сеялку, её обслуживание представляет собой ещё одну проблему. Мелкие фермеры, как правило, не обладают достаточными техническими возможностями для обслуживания сложных электронных датчиков и систем управления. При использовании профессиональных услуг производителей стоимость сеялки может резко возрасти. Это неразрешимая проблема для мелких фермеров, решающих, использовать интеллектуальную сеялку или нет.
6.4. Решения
Для крупных коммерческих ферм разумно выбирать интеллектуальную посевную технику, соответствующую отраслевым стандартам, и обеспечивать, чтобы у них была посевная техника с открытыми интерфейсами данных, позволяющими общаться с другой сельскохозяйственной техникой и системами управления. Более того, должна быть создана централизованная платформа управления сельским хозяйством. Эта платформа должна интегрировать аппаратные и программные данные, предоставляемые всеми типами сельскохозяйственной техники, чтобы достичь централизованного управления данными и их анализа.
Что касается мелких фермеров, рекомендуется активно подавать заявки на финансирование проектов сельскохозяйственной модернизации, предоставляемое государством или местными органами власти, чтобы снизить затраты на закупку. Дополнительно, несколько мелких фермерских хозяйств могут совместно покупать и использовать высококлассную интеллектуальную посевную технику, thus разделяя связанные с этим затраты. Более того, мелкие фермеры могут приобретать интеллектуальную посевную технику в рассрочку через программы финансового лизинга, предоставляемые финансовыми учреждениями, чтобы облегчить давление единовременной оплаты [20, 244].
7. Современное состояние, ограничения и перспективы развития
7.1. Современное состояние и ограничения
Интеллектуальная посевная техника для зерновых является одной из основных технологий в современном сельскохозяйственном оборудовании. Исследователи провели обширные исследования в этой области. Хотя некоторые достижения были сделаны, все еще существуют некоторые ограничения. Современное состояние и ограничения интеллектуальной посевной техники обсуждаются ниже.
(1) Существующие исследования по MDSDs в основном сосредоточены на повышении коэффициента качества; однако немного исследований focused на их адаптивности к различным семенам зерновых или уделяли внимание проценту повреждения семян разработанными MDSDs. Эти ограничения могут означать, что данный MDSD может использоваться только для определенной зерновой культуры, увеличивая процент простоя сеялки. Дополнительно, явления повреждения семян могут frequently происходить в практических операциях посева зерновых.
(2) Из-за сложных полевых условий эксплуатации, вибрация посевного unitа может влиять на стабильность глубины посева и снижать точность контроля GSPM. Большинство исследований по GSPMs касаются структурных проектов, но немного focused на динамических анализах для снижения влияния вибраций, вызванных неровной поверхностью почвы. Этот пробел в исследованиях может привести к неконтролируемой траектории падения семян во время практического посева зерновых.
(3) Большинство высокоточных датчиков свойств почвы относятся к probe-типу, которые должны быть вставлены в почву и передавать информацию с использованием парадигмы IoT. В фактических операциях посева зерновых, интеллектуальная посевная техника должна реализовывать переменный посев в реальном времени; однако только несколько датчиков свойств почвы могут быть установлены на посевной технике. Следовательно, посевная техника должна использовать предыдущие параметры свойств почвы, potentially снижая точность решений по норме высева.
(4) Существующие датчики нормы высева только могут контролировать количество семян вне высевающего аппарата, но распределение семян в почве не может контролироваться. Следовательно, существующая технология мониторинга расстояния между семенами оценивает расстояние между соседними семенами через оценку в соответствии с временным интервалом, и фактические расстояния между семенами под почвой не могут контролироваться.
(5) Цель существующей технологии контроля нормы высева — высевать семена зерновых с uniform и точными временными интервалами путем разработки инновационных алгоритмов управления. Однако некоторые типы семян зерновых, такие как кукуруза и рис, выигрывают от посева в определенном направлении и положении. Мало исследований focused на контроле направления и положения семян зерновых.
(6) Исследования систем контроля глубины посева в основном focused на том, как точно контролировать давление сошника или глубину посева. Однако в действительности, теоретическое давление сошника посевного агрегата должно варьироваться в зависимости от влажности обрабатываемого поля. В настоящее время, существующие системы контроля глубины посева не регулируют теоретическое давление сошника или глубину посева в соответствии с условиями почвы, что приводит к отклонению фактической глубины посева от теоретического значения.
7.2. Перспективы развития
Для преодоления вышеупомянутых ограничений существующей интеллектуальной посевной техники, ниже предлагаются соответствующие технические решения.
(1) Будущие исследования MDSDs должны быть направлены на повышение их адаптивности к различным семенам зерновых. Например, инновационные конструктивные отверстия пневматического MDSD могут всасывать несколько типов семян с similar формами, таких как пшеница, рис, ячмень и т.д., повышая полезность интеллектуальной посевной техники. Более того, с помощью DEM-моделирования и практических экспериментов, структурная оптимизация MDSDs должна проводиться для снижения явления повреждения семян во время процессов заполнения, транспортировки и высева.
(2) Динамические анализы должны выполняться, когда GSPM работает на неровной почве. Согласно аналитическим результатам, потенциально могут быть разработаны новые структуры или методы, которые могут поглощать вибрации, влияющие на GSPM.
(3) Должны быть разработаны бортовые датчики свойств почвы (которые могут быть основаны на технологиях высокого-спектра и ближней инфракрасной спектроскопии), и должны быть исследованы модели оценки свойств почвы. По сравнению с датчиками probe-типа, бесконтактные оптические датчики свойств почвы более подходят для использования в высокоскоростной-скоростной посевной технике во время практических посевных операций.
(4) Необходимо разработать интеллектуальные датчики распределения семян, которые могут обнаруживать семена под покрытой почвой. Георадар может служить ориентиром для такого датчика распределения семян, позволяя контролировать фактическое расстояние между семенами, междурядья и глубину посева. Таким образом, интеллектуальная посевная техника может предоставить больше информации для последующих агротехнических процессов.
(5) Должны быть разработаны инновационные структуры для высевающих аппаратов, которые могут регулировать положения семян. Положения семян зерновых должны регулироваться во время процесса заполнения семян, following которым ленточная транспортировка или технологии воздушного потока могут способствовать размещению семян в почве в desired положении.
(6) Лидарный датчик может быть установлен перед трактором для измерения условий высоты почвы. Более того, алгоритмы обработки облака точек для измерения высоты почвы должны быть разработаны в будущем. Таким образом, глубина посева может контролироваться в соответствии с высотой почвы, вместо давления сошника.
8. Выводы
Этот обзор предоставил подробный обзор ключевых технологий, используемых в интеллектуальной посевной технике для зерновых, с точки зрения активных управляемых исполнительных механизмов высева, интеллектуального контроля нормы высева и систем интеллектуального контроля положения семени. Что касается активных управляемых исполнительных механизмов высева, были представлены MDSDs и GSPMs. Некоторые MDSDs с инновационными структурами были обобщены, и применение методов оптимизации DEM и CFD-EDM для определения структурных параметров MDSDs было разъяснено. Принцип работы и процессы разработки GSPMs были представлены. Затем были рассмотрены существующие технологии определения свойств почвы, предназначенные для руководства принятием решений по оптимальной норме высева. На основе обратной связи от датчиков нормы высева была представлена интеллектуальная технология управления нормой высева, объясняющая, как выгружать семена зерновых в соответствии с равномерным временным интервалом. Интеллектуальное управление положением семян охватывает два процесса. Один включает в себя управление траекторией посевного агрегата, в то время как другой включает в себя контроль глубины посева. Точное управление траекторией посевного агрегата может способствовать распределению семян зерновых с соответствующими междурядьями и расстояниями между семенами, а интеллектуальный контроль глубины посева может использоваться для регулирования рабочей глубины посевного unitа в соответствии с высотой поверхности почвы.
В конце этой статьи были обсуждены и проанализированы современное состояние, ограничения и будущее развитие интеллектуальной посевной технологии. Исследователи достигли remarkable результатов в разработке активных управляемых исполнительных механизмов высева, интеллектуального контроля нормы высева и систем контроля положения семени. Современное состояние и ограничения интеллектуальных технологий обобщены ниже.
(a) Существующие исследования по MDSDs в основном сосредоточены на улучшении производительности высева, но MDSD по-прежнему не обладают достаточной приспособляемостью для различных семян злаковых культур;
(b) Разработка GSPMs сосредоточена на структурных проектах, в то время как немного исследований проанализировали ошибки глубины посева, вызванные механическими вибрациями, и предложили соответствующие решения;
(c) Кроме того, большинство датчиков свойств почвы относятся к зондовому типу и, следовательно, не могут быть установлены на посевную технику;
(d) Существующие датчики нормы высева могут контролировать только семена вне высевающего аппарата, что означает, что распределение семян в почве не может контролироваться;
(e) Была рассмотрена технология контроля нормы высева для управления распределением семян с использованием инновационных алгоритмов управления, но мало исследований рассматривали подходы к контролю положения семени;
(f) Существующие системы контроля глубины посева в основном сосредоточены на точном контроле давления сошника или глубины посева; однако они не могут регулировать теоретическое давление сошника или глубину посева в соответствии с условиями почвы.
В будущем целесообразно проводить исследования с целью разработки более адаптируемых MDSDs, бортовых датчиков свойств почвы, датчиков распределения семян и методов контроля положения семени. Мы надеемся, что этот обзор эффективно представляет состояние исследований ключевых технологий для интеллектуальной посевной техники зерновых с нескольких сторон, что может служить reference для дальнейших исследований в этой области.
Ссылки
1. Gunathunga, C.; Senanayake, S.; Jayasinghe, M.A.; Brennan, C.S.; Truong, T.; Marapana, U.; Chandrapala, J. Germination effects on nutritional quality: A comprehensive review of selected cereals and pulses changes. J. Food Compos. Anal. 2024, 128, 106024. [Google Scholar] [CrossRef]
2. Available online: https://www.fao.org/faostat/zh/#data (accessed on 17 November 2024).
3. Dhima, K.V.; Lithourgidis, A.S.; Vasilakoglou, I.B.; Dordas, C.A. Competition indices of common vetch and cereal intercrops in two seeding ratio. Field Crops Res. 2007, 100, 249–256. [Google Scholar] [CrossRef]
4. Yadelew, Z.; Tadesse, T.M.; Tarekegn, W. Appropriate seed source and rate enhanced the productivity of bread wheat varieties under irrigated conditions in North Mecha, Amhara region, Ethiopia. Heliyon 2024, 10, 31568. [Google Scholar] [CrossRef]
5. Edwards, L. Comparison of two spring seeding methods to establish forage cover crops in relay with winter cereals. Soil Tillage Res. 1998, 45, 227–235. [Google Scholar] [CrossRef]
6. Takele, M.M.; Dires, G.Z.; Mintesnot, S.M.; Kidanemariam Gelaw, G. Design and development of a combined seedbed compactor and teff seed cum fertilizer drill machine. Heliyon 2024, 10, 36856. [Google Scholar] [CrossRef]
7. Dhillon, G.S.; Baarda, L.; Gretzinger, M.; Coles, K.; Beres, B. Effect of precision planting and seeding rates on canola plant density and seed yield in southern Alberta. Can. J. Plant Sci. 2022, 102, 698–709. [Google Scholar] [CrossRef]
8. Pawelek, K.A.; Smith, F.S.; Falk, A.D.; Clayton, M.K.; Haby, K.W.; Rankin, D.W. Comparing Three Common Seeding Techniques for Pipeline Vegetation Restoration: A Case Study in South Texas. Rangelands 2015, 37, 99–105. [Google Scholar] [CrossRef][Green Version]
9. Chen, Y.; Tessier, S.; Irvine, B. Drill and crop performances as affected by different drill configurations for no-till seeding. Soil Tillage Res. 2004, 77, 147–155. [Google Scholar] [CrossRef]
10. Vaitauskienė, K.; Šarauskis, E.; Romaneckas, K.; Jasinskas, A. Design, development and field evaluation of row-cleaners for strip tillage in conservation farming. Soil Tillage Res. 2017, 174, 139–146. [Google Scholar] [CrossRef]
11. Zhao, P.; Ju, X.; Yang, P.; Zheng, Z.; Huang, Y.; Gao, X.; Shi, J. Design and experiment of fertilizer pipe front-mounted wheat wide seedling belt rotary tillage fertilization planter. Trans. Chin. Soc. Agric. Eng. 2024, 40, 12–21. [Google Scholar]
12. Lin, J.; Qian, W.; Li, B.; Liu, Y. Simulation and validation of seeding depth mathematical model of 2BG-2 type corn ridge planting no-till planter. Trans. Chin. Soc. Agric. Eng. 2015, 31, 19–24. [Google Scholar]
13. Liu, H.; Yi, L.; Xie, Y.; Zhao, Y.; Fang, L. Development of the transfer platform with ground wheel in front for the medium-sized no-tillage stalk mulching ridge corn planter. Trans. Chin. Soc. Agric. Eng. 2022, 38, 10–18. [Google Scholar]
14. Hu, H.; Li, H.; Li, C.; Wang, Q.; He, J.; Li, W.; Zhang, X. Design and experiment of broad width and precision minimal tillage wheat planter in rice stubble field. Trans. Chin. Soc. Agric. Eng. 2016, 32, 24–32. [Google Scholar]
15. Shang, S.; Wu, X.; Yang, R.; Li, G.; Yang, X.; Chen, D. Research status and prospect of plot-sowing equipment and technology. Trans. Chin. Soc. Agric. Mach. 2021, 52, 1–20. [Google Scholar]
16. Fu, Z.; Gong, Z.; Chu, Q.; Li, H.; Zhang, M.; Huang, Y. Design and test of electro-hydraulic control system for soil compaction of maize planter. Trans. Chin. Soc. Agric. Mach. 2024, 55, 273–284. [Google Scholar]
17. Du, Z.; He, X.; Yang, L.; Zhang, D.; Cui, T.; Zhong, X. Research progress on precision variable-rate seeding technology and equipment for maize. Trans. Chin. Soc. Agric. Eng. 2023, 39, 1–16. [Google Scholar]
18. Ding, Y.; Yang, L.; Zhang, D.; Cui, T.; Zhang, K.; Wang, M. Design of row-unit driver for maize variable rate planter. Trans. Chin. Soc. Agric. Eng. 2019, 35, 1–9. [Google Scholar]
19. Bai, H.; Wang, N.; Long, J. Image-based corn seed embryo orientation detection and adjustment for precision planting. Comput. Electron. Agric. 2024, 224, 109139. [Google Scholar] [CrossRef]
20. Šarauskis, E.; Kazlauskas, M.; Naujokienė, V.; Bručienė, I.; Steponavičius, D.; Romaneckas, K.; Jasinskas, A. Variable Rate Seeding in Precision Agriculture: Recent Advances and Future Perspectives. Agriculture 2022, 12, 305. [Google Scholar] [CrossRef]
21. Munnaf, M.A.; Haesaert, G.; Mouazen, A.M. Site-specific seeding for maize production using management zone maps delineated with multi-sensors data fusion scheme. Soil Tillage Res. 2022, 220, 105377. [Google Scholar] [CrossRef]
22. Virk, S.S.; Fulton, J.P.; Porter, W.M.; Pate, G.L. Row-crop planter performance to support variable-rate seeding of maize. Precis. Agric. 2020, 21, 603–619. [Google Scholar] [CrossRef]
23. Yang, L.; Yan, B.; Zhang, D.; Zhang, T.; Wang, Y.; Cui, T. Research progress on precision planting technology of maize. Trans. Chin. Soc. Agric. Mach. 2016, 47, 38–48. [Google Scholar]
24. Wang, H.; Yang, L.; Zhang, D.; Cui, T.; He, X.; Xiao, T.; Li, H.; Du, Z.; Xie, C. Comparative investigation and evaluation of electric-drive seed-metering systems across diverse speed ranges for enhanced high-precision seeding applications. Comput. Electron. Agric. 2024, 222, 108976. [Google Scholar] [CrossRef]
25. Xie, C.; Yang, L.; Zhang, D.; Cui, T.; He, X.; Du, Z.; Xiao, T. A signal output quantity (SOQ) judgment algorithm for improving seeding quantity accuracy. Comput. Electron. Agric. 2022, 201, 107321. [Google Scholar] [CrossRef]
26. Zhang, C.; Liu, T.; Zheng, Z.; Fang, J.; Xie, X.; Chen, L. Design and test of the precision seeding dispenser with the staggered convex teeth for wheat sowing with wide seedling belt. Trans. Chin. Soc. Agric. Eng. 2024, 40, 47–59. [Google Scholar]
27. Gao, X.; Xie, G.; Xu, Y.; Yu, Y.; Lai, Q. Application of a staggered symmetrical spiral groove wheel on a quantitative feeding device and investigation of particle motion characteristics based on DEM. Powder Technol. 2022, 407, 117650. [Google Scholar] [CrossRef]
28. Shang, Y.; Zhou, B.; Yang, J.; Zhang, S. Design and experiment of impeller seed guide device for rice internal suction hole direct seeding device. Sci. Rep. 2024, 14, 13300. [Google Scholar] [CrossRef] [PubMed]
29. Li, C.; Zhang, D.; Yang, L.; Cui, T.; He, X.; Li, Z.; Dong, J.; Xing, S.; Jiang, Y.; Liang, J. Research on a centrifugal high-speed precision seed metering device for maize with airflow-assisted seed filling and cleaning. Comput. Electron. Agric. 2024, 226, 109434. [Google Scholar] [CrossRef]
30. Xing, H.; Cao, X.; Zhong, P.; Wan, Y.; Lin, J.; Zang, Y.; Zhang, G. DEM-CFD coupling simulation and optimisation of rice seed particles seeding a hill in double cavity pneumatic seed metering device. Comput. Electron. Agric. 2024, 224, 109075. [Google Scholar] [CrossRef]
31. Li, Z.; Xie, R.; Wang, T.; Zhang, T.; Liu, L.; Chen, Y. Pipeline negative pressure monitoring system of pneumatic precision seed dispenser for rape. Trans. Chin. Soc. Agric. Mach. 2024, 55, 180–189. [Google Scholar]
32. Xie, C.; Zhang, D.; Yang, L.; Cui, T.; He, X.; Du, Z. Precision seeding parameter monitoring system based on laser sensor and wireless serial port communication. Comput. Electron. Agric. 2021, 190, 106429. [Google Scholar] [CrossRef]
33. Sun, W.; Yi, S.; Qi, H.; Wang, S.; Li, Y.; Dai, Z. Design and experiment of twin discs intertwined air-pressure high-speed precision seed-metering device for maize delta-row dense plantings. Trans. Chin. Soc. Agric. Mach. 2024, 55, 168–179. [Google Scholar]
34. Wang, W.; Song, L.; Shi, W.; Wei, D.; Chen, Y.; Chen, L. Design and experiment of air-suction double-row staggered precision seed metering device for maize dense planting. Trans. Chin. Soc. Agric. Mach. 2024, 55, 53–63. [Google Scholar]
35. Yang, L.; Li, Z.; Zhang, D.; Li, C.; Cui, T.; He, X. Design and test of the T-shaped hole of centrifugal high-speed maize precision seed metering device. Trans. Chin. Soc. Agric. Eng. 2024, 40, 50–60. [Google Scholar]
36. Li, Y.; Zhao, S.; Yang, L.; Song, Q.; Li, B.; Yang, F. Design and test of high-speed precision seeder of independent fractionated soybean double-row brush. Trans. Chin. Soc. Agric. Mach. 2024, 55, 101–110. [Google Scholar]
37. Wang, Y.; Huang, S.; Zhang, W.; Qi, B.; Zhou, X.; Ding, Y. Design and experiment of wheat precision seed metering device with staggered hook-tooth. Trans. Chin. Soc. Agric. Mach. 2024, 55, 142–153. [Google Scholar]
38. Zhu, H.; Wu, X.; Bai, L.; Li, R.; Guo, G.; Qin, J.; Zhang, Y.; Li, H. Design and experiment of a soybean shaftless spiral seed discharge and seed delivery device. Sci. Rep. 2023, 13, 20751. [Google Scholar] [CrossRef] [PubMed]
39. Zhang, Y.; Tang, Y.; He, D.; Shi, J.; Hao, L.; Li, J.; Sun, D.; Li, H.; Zhang, Z.; Ye, S.; et al. Design and Test of Electromagnetic Vibration Type Fine and Small-Amount Seeder for Millet. Agriculture 2024, 14, 1528. [Google Scholar] [CrossRef]
40. Wang, Y.; Li, H.; Wang, Q.; He, J.; Lu, C.; Liu, K. Design and experiment of wheat mechanical shooting seed-metering device. Trans. Chin. Soc. Agric. Mach. 2020, 51, 73–84. [Google Scholar]
41. Wang, Y.; Kang, X.; Wang, G.; Ji, W. Numerical Analysis of Friction-Filling Performance of Friction-Type Vertical Disc Precision Seed-Metering Device Based on EDEM. Agriculture 2023, 13, 2183. [Google Scholar] [CrossRef]
42. Dun, G.Q.; Mao, N.; Gao, Z.; Wu, X.P.; Liu, W.; Zhou, C. Model construction of soybean average diameter and hole parameters of seed-metering wheel based on DEM. Int. J. Agric. Biol. Eng. 2022, 15, 101–110. [Google Scholar] [CrossRef]
43. Wang, L.; Liao, Q.; Xi, R.; Li, X.; Liao, Y. Influence of an equal width polygon groove-tooth wheel on feeding performance of the seed feeding device for wheat. Comput. Electron. Agric. 2024, 217, 108565. [Google Scholar] [CrossRef]
44. Gao, X.; Cui, T.; Zhou, Z.; Yu, Y.; Xu, Y.; Zhang, D.; Song, W. DEM study of particle motion in novel high-speed seed metering device. Adv. Powder Technol. 2021, 32, 1438–1449. [Google Scholar] [CrossRef]
45. Dong, J.; Zhang, S.; Zheng, Z.; Wu, J.; Huang, Y.; Gao, X. Development of a novel perforated type precision metering device for efficient and cleaner production of maize. J. Clean. Prod. 2024, 443, 140928. [Google Scholar] [CrossRef]
46. Deng, S.; Feng, Y.; Cheng, X.; Wang, X.; Zhang, X.; Wei, Z. Disturbance analysis and seeding performance evaluation of a pneumatic-seed spoon interactive precision maize seed-metering device for plot planting. Biosyst. Eng. 2024, 247, 221–240. [Google Scholar] [CrossRef]
47. Li, C.; Cui, T.; Zhang, D.; Yang, L.; He, X.; Li, Z.; Jing, M.; Dong, J.; Xing, S. Design and experiment of a centrifugal filling and cleaning high-speed precision seed metering device for maize. J. Clean. Prod. 2023, 426, 139083. [Google Scholar] [CrossRef]
48. Liu, C.; Wei, D.; Du, X.; Jiang, M.; Song, J.; Zhang, F. Design and test of wide seedling strip wheat precision hook-hole type seed-metering device. Trans. Chin. Soc. Agric. Mach. 2019, 50, 75–84. [Google Scholar]
49. Li, H.; Yang, L.; Zhang, D.; Tao, C.; He, X.; Xie, C.; Li, C.; Du, Z.; Xiao, T.; Li, Z.; et al. Design and optimization of a high-speed maize seed guiding device based on DEM-CFD coupling method. Comput. Electron. Agric. 2024, 227, 109604. [Google Scholar] [CrossRef]
50. Wang, Y.; Li, H.; Hu, H.; He, J.; Wang, Q.; Lu, C.; Liu, P.; Yang, Q.; He, D.; Jiang, S.; et al. A noncontact self-suction wheat shooting device for sustainable agriculture: A preliminary research. Comput. Electron. Agric. 2022, 197, 106927. [Google Scholar] [CrossRef]
51. Tang, H.; Xu, F.; Guan, T.; Xu, C.; Wang, J. Design and test of a pneumatic type of high-speed maize precision seed metering device. Comput. Electron. Agric. 2023, 211, 107997. [Google Scholar] [CrossRef]
52. Wang, J.; Tang, H.; Zhou, W.; Yang, W.; Wang, Q. Improved Design and Experiment on Pickup Finger Precision Seed Metering Device. Trans. Chin. Soc. Agric. Mach. 2015, 46, 68–76. [Google Scholar]
53. Liu, R.; Liu, Z.; Liu, L.; Li, Y. Design and Experiment of Corn High Speed Air Suction Seed Metering Device with Disturbance Assisted Seed-filling. Trans. Chin. Soc. Agric. Mach. 2022, 53, 50–59. [Google Scholar]
54. Geng, D.; Li, Y.; Meng, P.; Du, R.; Meng, F. Design and Test on Telescopic Clip Finger Type of Metering Device. Trans. Chin. Soc. Agric. Mach. 2016, 47, 38–45. [Google Scholar]
55. Hou, S.; Zou, Z.; Wei, Z.; Zhu, Y.; Chen, H. Design and Experiment of Flexible Mechanical Soybean Precision Seed metering Device. Trans. Chin. Soc. Agric. Mach. 2020, 51, 77–86, 108. [Google Scholar]
56. Fang, Z.; Zhang, J.; Chen, J.; Pan, F.; Wang, B.; Ji, C. Design and Experimental Analysis of an Air-Suction Wheat Precision Hill-Seed Metering Device. Agriculture 2024, 14, 1931. [Google Scholar] [CrossRef]
57. Hou, J.; Ma, D.; Li, H.; Zhang, Z.; Zhou, J.; Shi, S. Design and Experiment of Pneumatic Centrifugal Combined Precision Seed Metering Device for Wheat. Trans. Chin. Soc. Agric. Mach. 2023, 54, 35–45. [Google Scholar]
58. He, R.; Wang, J.; XU, G.; He, X.; Duan, Q.; Ding, Q. Design and Experiment of Wheat Precise Seed Metering Apparatus with Positive and Negative Pressure with Function of Limiting Seed Filling Posture. Trans. Chin. Soc. Agric. Mach. 2022, 53, 39–49. [Google Scholar]
59. Zang, Y.; Huang, Z.; Qin, W.; He, S.; Qian, C.; Jiang, Y.; Tao, W.; Zhang, M.; Wang, Z. Design of hybrid rice air-suction single-seed metering device. Trans. Chin. Soc. Agric. Eng. 2024, 40, 181–191. [Google Scholar]
60. Nielsen, S.K.; Nørremark, M.; Green, O. Sensor and control for consistent seed drill coulter depth. Comput. Electron. Agric. 2016, 127, 690–698. [Google Scholar] [CrossRef]
61. Gao, Y.; Wang, X.; Yang, S.; Zhai, C.; Zhao, X.; Zhao, C. Development of CAN-based sowing depth monitoring and evaluation system. Trans. Chin. Soc. Agric. Mach. 2019, 50, 23–32. [Google Scholar]
62. Zhang, C.; Wang, X.; Guo, M.; Zhao, J.; Li, M. A compacting device of rice dry direct-seeding planter based on DEM-MFBD coupling simulation significantly improves the seedbed uniformity and seedling emergence rate. Biosyst. Eng. 2024, 246, 26–40. [Google Scholar] [CrossRef]
63. Kim, Y.-S.; Kim, T.-J.; Kim, Y.-J.; Lee, S.-D.; Park, S.-U.; Kim, W.-S. Development of a real-time tillage depth measurement system for agricultural tractors: Application to the effect analysis of tillage depth on draft force during plow tillage. Sensors 2020, 20, 912. [Google Scholar] [CrossRef]
64. He, X.; Zhang, J.; Zhang, R.; Zhu, Y.; Wang, W.; Zhang, H. Development of the seed-ditch compaction device for wide-boundary sowing wheat. Trans. Chin. Soc. Agric. Eng. 2023, 39, 18–29. [Google Scholar]
65. Xue, B.; Zhou, L.; Niu, K.; Zheng, Y.; Bai, S.; Wei, L. Sowing depth control system of wheat planter based on adaptive fuzzy PID. Trans. Chin. Soc. Agric. Mach. 2023, 54, 93–102. [Google Scholar]
66. Li, Y.; Meng, P.; Geng, D.; He, K.; Meng, F.; Jiang, M. Intelligent system for adjusting and controlling corn seeding depth. Trans. Chin. Soc. Agric. Mach. 2016, 47, 62–68. [Google Scholar]
67. Sharipov, G.M.; Paraforos, D.S.; Griepentrog, H.W. Implementation of a magnetorheological damper on a no-till seeding assembly for optimising seeding depth. Comput. Electron. Agric. 2018, 150, 465–475. [Google Scholar] [CrossRef]
68. Tang, Q.; Wu, J.; Jiang, L.; Wu, C.; Xiao, T.; Jiang, T. Design and test of hydraulic profiling system for rape seedling combined transplanter. Trans. Chin. Soc. Agric. Mach. 2021, 52, 95–102. [Google Scholar]
69. Liu, L.; Wang, X.; Zhang, X.; Cheng, X.; Wei, Z.; Ji, J.; Li, H.; Zhang, H.; Wang, M. Sowing depth control strategy based on the downforce measurement and control system of ‘T’-shaped furrow opener. Biosyst. Eng. 2024, 247, 97–108. [Google Scholar] [CrossRef]
70. Liu, L.; Wang, X.; Zhang, X.; Cheng, X.; Wei, Z.; Zhou, H.; Zhao, K. The impact of ‘T’-shaped furrow opener of no-tillage seeder on straw and soil based on discrete element method. Comput. Electron. Agric. 2023, 213, 108278. [Google Scholar] [CrossRef]
71. Li, H.; He, J.; Wang, C.; Yang, W.; Lin, H.; Wang, Q.; Yang, H.; Tan, L. Research Progress on the Development of the Planter Unit for Furrowing Control and the Depth Measurement Technology. Appl. Sci. 2023, 13, 11884. [Google Scholar] [CrossRef]
72. Courtney, R.G.; Mullen, G.J. Soil quality and barley growth as influenced by the land application of two compost types. Bioresour. Technol. 2008, 99, 2913–2918. [Google Scholar] [CrossRef] [PubMed]
73. Ma, Y.; Lei, T.; Zhang, X.; Chen, Y. Volume replacement method for direct measurement of soil moisture and bulk density. Trans. Chin. Soc. Agric. Eng. 2013, 29, 86–93. [Google Scholar]
74. Li, J.; Xu, Y.; Jiang, R.; Yang, Z.; Lu, H. Establishment and verification of model for ultrasonic soil water content detector. Trans. Chin. Soc. Agric. Eng. 2017, 33, 127–133. [Google Scholar]
75. Suo, R.; Kulbir, S.; You, F.; Conner, R.; Cober, E.; Wang, M.; Hou, A. Low temperature and excess moisture affect seed germination of soybean (Glycine max L.) under controlled environments. Can. J. Plant Sci. 2024, 104, 375–387. [Google Scholar] [CrossRef]
76. Available online: https://metergroup.com/products/teros-12/ (accessed on 17 November 2024).
77. Available online: https://acclima.com/tdr-315n-sdi-12-soil-moisture-sensor-data-sheet/ (accessed on 17 November 2024).
78. Available online: https://acclima.com/tdt-soil-moisture-sensor/ (accessed on 17 November 2024).
79. Kalita, H.; Palaparthy, V.S.; Baghini, M.S.; Aslam, M. Electrochemical synthesis of graphene quantum dots from graphene oxide at room temperature and its soil moisture sensing properties. Carbon 2020, 165, 9–17. [Google Scholar] [CrossRef]
80. Ullah, A.; Zubair, M.; Zulfiqar, M.H.; Kamsong, W.; Karuwan, C.; Massoud, Y.; Mehmood, M.Q. Highly sensitive screen-printed soil moisture sensor array as green solutions for sustainable precision agriculture. Sens. Actuators A Phys. 2024, 371, 115297. [Google Scholar] [CrossRef]
81. Kojima, Y.; Kawashima, T.; Noborio, K.; Kamiya, K.; Horton, R. A dual-probe heat pulse-based sensor that simultaneously determines soil thermal properties, soil water content and soil water matric potential. Comput. Electron. Agric. 2021, 188, 106331. [Google Scholar] [CrossRef]
82. Kapilaratne, R.G.C.J.; Lu, M. Automated general temperature correction method for dielectric soil moisture sensors. J. Hydrol. 2017, 551, 203–216. [Google Scholar] [CrossRef]
83. Phillips, A.J.; Newlands, N.K.; Liang, S.H.L.; Ellert, B.H. Integrated sensing of soil moisture at the field-scale: Measuring, modeling and sharing for improved agricultural decision support. Comput. Electron. Agric. 2014, 107, 73–88. [Google Scholar] [CrossRef]
84. Li, Y.; Zhu, M.; Luo, L.; Wang, S.; Chen, C.; Zhang, Z.; Yao, Y.; Hu, X. GNSS-IR dual-frequency data fusion for soil moisture inversion based on Helmert variance component estimation. J. Hydrol. 2024, 631, 130752. [Google Scholar] [CrossRef]
85. Nouraki, A.; Golabi, M.; Albaji, M.; Naseri, A.A.; Homayouni, S. Enhanced root zone soil moisture monitoring using multitemporal remote sensing data and machine learning techniques. Remote Sens. Appl. Soc. Environ. 2024, 36, 101354. [Google Scholar] [CrossRef]
86. Murcia, E.; Guzmán, S.M. Using singular spectrum analysis and empirical mode decomposition to enhance the accuracy of a machine learning-based soil moisture forecasting algorithm. Comput. Electron. Agric. 2024, 224, 109200. [Google Scholar] [CrossRef]
87. Bandaru, L.; Irigireddy, B.C.; Pvnr, K.; Davis, B. DeepQC: A deep learning system for automatic quality control of in-situ soil moisture sensor time series data. Smart Agric. Technol. 2024, 8, 100514. [Google Scholar] [CrossRef]
88. Lei, F.; Crow, W.T.; Kustas, W.P.; Dong, J.; Yang, Y.; Knipper, K.R.; Anderson, M.C.; Gao, F.; Notarnicola, C.; Greifeneder, F.; et al. Data assimilation of high-resolution thermal and radar remote sensing retrievals for soil moisture monitoring in a drip-irrigated vineyard. Remote Sens. Environ. 2020, 239, 111622. [Google Scholar] [CrossRef] [PubMed]
89. Song, G.; Hayes, M.H.B.; Novotny, E.H. A two-year incubation study of transformations of crop residues into soil organic matter (SOM) and a procedure for the sequential isolation and the fractionation of components of SOM. Sci. Total Environ. 2021, 763, 143034. [Google Scholar] [CrossRef]
90. Du, Z.; Yang, L.; Zhang, D.; Cui, T.; He, X.; Xiao, T.; Xie, C.; Li, H. Corn variable-rate seeding decision based on gradient boosting decision tree model. Comput. Electron. Agric. 2022, 198, 107025. [Google Scholar] [CrossRef]
91. Bai, Y.; Yang, W.; Wang, Z.; Cao, Y.; Li, M. Improving the estimation accuracy of soil organic matter based on the fusion of near-infrared and Raman spectroscopy using the outer-product analysis. Comput. Electron. Agric. 2024, 219, 108760. [Google Scholar] [CrossRef]
92. Available online: https://www.insentek.com/product/fangwu.html (accessed on 17 November 2024).
93. Castaldi, F.; Palombo, A.; Santini, F.; Pascucci, S.; Pignatti, S.; Casa, R. Evaluation of the potential of the current and forthcoming multispectral and hyperspectral imagers to estimate soil texture and organic carbon. Remote Sens. Environ. 2016, 179, 54–65. [Google Scholar] [CrossRef]
94. Zhang, Y.; Luo, C.; Zhang, Y.; Gao, L.; Wang, Y.; Wu, Z.; Zhang, W.; Liu, H. Integration of bare soil and crop growth remote sensing data to improve the accuracy of soil organic matter mapping in black soil areas. Soil Tillage Res. 2024, 244, 106269. [Google Scholar] [CrossRef]
95. Ou, D.; Tan, K.; Lai, J.; Jia, X.; Wang, X.; Chen, Y.; Li, J. Semi-supervised DNN regression on airborne hyperspectral imagery for improved spatial soil properties prediction. Geoderma 2021, 385, 114875. [Google Scholar] [CrossRef]
96. Lazaar, A.; Mouazen, A.M.; El Hammouti, K.; Fullen, M.; Pradhan, B.; Memon, M.S.; Andich, K.; Monir, A. The application of proximal visible and near-infrared spectroscopy to estimate soil organic matter on the Triffa Plain of Morocco. Int. Soil Water Conserv. Res. 2020, 8, 195–204. [Google Scholar] [CrossRef]
97. Hong, Y.; Liu, Y.; Chen, Y.; Liu, Y.; Yu, L.; Liu, Y.; Cheng, H. Application of fractional-order derivative in the quantitative estimation of soil organic matter content through visible and near-infrared spectroscopy. Geoderma 2019, 337, 758–769. [Google Scholar] [CrossRef]
98. Khanal, S.; Fulton, J.; Klopfenstein, A.; Douridas, N.; Shearer, S. Integration of high-resolution remotely sensed data and machine learning techniques for spatial prediction of soil properties and corn yield. Comput. Electron. Agric. 2018, 153, 213–225. [Google Scholar] [CrossRef]
99. Qian, J.; Yang, J.; Sun, W.; Zhao, L.; Shi, L.; Dang, C. Evaluation and improvement of temporal robustness and transfer performance of surface soil moisture estimated by machine learning regression algorithms. Comput. Electron. Agric. 2024, 217, 108518. [Google Scholar]
100. Nawar, S.; Buddenbaum, H.; Hill, J.; Kozak, J.; Mouazen, A.M. Estimating the soil clay content and organic matter by means of different calibration methods of vis-NIR diffuse reflectance spectroscopy. Soil Tillage Res. 2016, 155, 510–522. [Google Scholar] [CrossRef]
101. Li, H.; Ju, W.; Song, Y.; Cao, Y.; Yang, W.; Li, M. Soil organic matter content prediction based on two-branch convolutional neural network combining image and spectral features. Comput. Electron. Agric. 2024, 217, 108561. [Google Scholar] [CrossRef]
102. Wang, Y.; Cui, B.; Zhou, Y.; Sun, X. Advances in monitoring soil nutrients by near-infrared spectroscopy. In Computer and Computing Technologies in Agriculture XI; Springer: Berlin/Heidelberg, Germany, 2019; Volume 546, pp. 94–99. [Google Scholar]
103. Pölönen, I.; Saari, H.; Kaivosoja, J.; Honkavaara, E.; Pesonen, L. Hyperspectral imaging based biomass and nitrogen content estimations from light-weight UAV. In Remote Sensing for Agriculture, Ecosystems, and Hydrology XV; SPIE: Dresden, Germany, 2013; Volume 8887. [Google Scholar]
104. Seesaard, T.; Goel, N.; Kumar, M.; Wongchoosuk, C. Advances in gas sensors and electronic nose technologies for agricultural cycle applications. Comput. Electron. Agric. 2022, 193, 106673. [Google Scholar] [CrossRef]
105. Pal, A.; Dubey, S.K.; Goel, S.; Kalita, P.K. Portable sensors in precision agriculture: Assessing advances and challenges in soil nutrient determination. TrAC Trends Anal. Chem. 2024, 180, 117981. [Google Scholar] [CrossRef]
106. Liu, S.; Chen, X.; Xia, X.; Jin, Y.; Wang, G.; Jia, H.; Huang, D. Electronic sensing combined with machine learning models for predicting soil nutrient content. Comput. Electron. Agric. 2024, 221, 108947. [Google Scholar] [CrossRef]
107. Santana, F.B.; Otani, S.; De Souza, A.; Poppi, R. Determination of soil organic matter using visible-near infrared spectroscopy and machine learning. Spectrosc. Eur. 2019, 31, 14. [Google Scholar]
108. Ba, Y.; Liu, J.; Han, J.; Zhang, X. Application of vis-NIR spectroscopy for determination of the content of organic matter in saline-alkali soils. Spectrochim. Acta A Mol. Biomol. Spectrosc. 2020, 229, 117863. [Google Scholar] [CrossRef] [PubMed]
109. Bao, Y.; Meng, X.; Ustin, S.; Wang, X.; Zhang, X.; Liu, H.; Tang, H. Vis-SWIR spectral prediction model for soil organic matter with different grouping strategies. CATENA 2020, 195, 104703. [Google Scholar] [CrossRef]
110. Xue, J.; Zhang, X.; Chen, S.; Lu, R.; Wang, Z.; Wang, N.; Hong, Y.; Chen, X.; Xiao, Y.; Ma, Y.; et al. The validity domain of sensor fusion in sensing soil quality indicators. Geoderma 2023, 438, 116657. [Google Scholar] [CrossRef]
111. Liu, K.; Wang, Y.; Wang, X.; Sun, Z.; Song, Y.; Di, H.; Yan, Q.; Hua, D. Characteristic bands extraction method and prediction of soil nutrient contents based on an analytic hierarchy process. Measurement 2023, 220, 113408. [Google Scholar] [CrossRef]
112. Li, H.; Song, Y.; Wang, Z.; Li, M.; Yang, W. Development of an online prediction system for soil organic matter and soil moisture content based on multi-modal fusion. Comput. Electron. Agric. 2024, 227, 109514. [Google Scholar] [CrossRef]
113. Jia, C.; Zhou, T.; Zhang, K.; Yang, L.; Zhang, D.; Cui, T.; He, X.; Sang, X. Design and experimentation of soil organic matter content detection system based on high-temperature excitation principle. Comput. Electron. Agric. 2023, 214, 108325. [Google Scholar] [CrossRef]
114. Liu, J.; Zhang, D.; Yang, L.; Ma, Y.; Cui, T.; He, X.; Du, Z. Developing a generalized vis-NIR prediction model of soil moisture content using external parameter orthogonalization to reduce the effect of soil type. Geoderma 2022, 419, 115877. [Google Scholar] [CrossRef]
115. Heil, K.; Schmidhalter, U. Theory and guidelines for the application of the geophysical sensor EM38. Sensors 2019, 19, 4293. [Google Scholar] [CrossRef] [PubMed]
116. Agah, A.E.; Meire, P.; De Deckere, E. Laboratory calibration of TDR probes for simultaneous measurements of soil water content and electrical conductivity. Commun. Soil Sci. Plant Anal. 2019, 50, 1525–1540. [Google Scholar] [CrossRef]
117. Wei, H.; Meng, F. Soil electrical conductivity measurement based on four-terminal method and time domain reflectometry method. Trans. Chin. Soc. Agric. Mach. 2019, 50, 237–242. [Google Scholar]
118. Wang, D.; Yang, W.; Meng, C.; Cao, Y.; Li, M. Research on vehicle-mounted soil electrical conductivity and moisture content detection system based on current–voltage six-terminal method and spectroscopy. Comput. Electron. Agric. 2023, 205, 107640. [Google Scholar] [CrossRef]
119. Available online: https://geonics.com/html/em38.html (accessed on 17 November 2024).
120. Munnaf, M.A.; Mouazen, A.M. An automated system of soil sensor-based site-specific seeding for silage maize: A proof of concept. Comput. Electron. Agric. 2023, 209, 107872. [Google Scholar] [CrossRef]
121. Yang, W.; Han, Y.; Li, M.; Meng, C. Vehicle-mounted soil conductivity detection system based on digital oscilloscope. Trans. Chin. Soc. Agric. Mach. 2020, 51, 395–401. [Google Scholar]
122. Available online: http://www.bjecotech.com/ecotech-Article-1606810/ (accessed on 17 November 2024).
123. Murata, H.; Futagawa, M.; Kumazaki, T.; Saigusa, M.; Ishida, M.; Sawada, K. Millimeter scale sensor array system for measuring the electrical conductivity distribution in soil. Comput. Electron. Agric. 2014, 102, 43–50. [Google Scholar] [CrossRef]
124. Han, Y.; Yang, W.; Li, M.; Meng, C. Comparative study of two soil conductivity meters based on the principle of current-voltage four-terminal method. IFAC-PapersOnLine 2019, 52, 36–42. [Google Scholar] [CrossRef]
125. Fu, Y.; Horton, R.; Ren, T.; Heitman, J.L. A general form of Archie’s model for estimating bulk soil electrical conductivity. J. Hydrol. 2021, 597, 126160. [Google Scholar] [CrossRef]
126. Choo, H.; Park, J.; Do, T.T.; Lee, C. Estimating the electrical conductivity of clayey soils with varying mineralogy using the index properties of soils. Appl. Clay Sci. 2022, 217, 106388. [Google Scholar] [CrossRef]
127. Qi, J.; Wang, K.; Bao, Z.; Zhang, W.; Guo, H.; Liu, X.; Li, N. Measuring soil electrical conductivity using dual-array fusion of Wenner and Schlumberger. Trans. Chin. Soc. Agric. Eng. 2024, 40, 90–99. [Google Scholar]
128. Baradaran Motie, J.B.; Aghkhani, M.H.; Rohani, A.; Lakzian, A. A soft-computing approach to estimate soil electrical conductivity. Biosyst. Eng. 2021, 205, 105–120. [Google Scholar] [CrossRef]
129. Cao, X.; Ding, J.; Ge, X.; Wang, J. Estimation of soil electrical conductivity based on spectral index and machine learning algorithm. Acta Pedol. Sin. 2020, 57, 867–877. [Google Scholar]
130. Stanley, J.D.; Mehring, G.H.; Wiersma, J.J.; Ransom, J.K. A decision support system to guide grower selection of optimal seeding rates of wheat cultivars in diverse environments. Front. Plant Sci. 2020, 11, 779. [Google Scholar] [CrossRef]
131. Mehring, G.H.; Wiersma, J.J.; Stanley, J.D.; Ransom, J.K. Genetic and environmental predictors for determining optimal seeding rates of diverse wheat cultivars. Agronomy 2020, 10, 332. [Google Scholar] [CrossRef]
132. Loewen, S.; Maxwell, B.D. Optimizing crop seeding rates on organic grain farms using on farm precision experimentation. Field Crops Res. 2024, 318, 109593. [Google Scholar] [CrossRef]
133. Geng, G.; Ye, X.; Ren, T.; Zhang, Y.; Li, X.; Cong, R.; Cakmak, I.; Lu, Z.; Lu, J. Optimal magnesium management for better seed yield and quality of rapeseed based on native soil magnesium supply. Eur. J. Agron. 2024, 161, 127364. [Google Scholar] [CrossRef]
134. Quinn, D.J.; Poffenbarger, H.J.; Lee, C.D. Rye cover crop and in-furrow fertilizer and fungicide impacts on corn optimum seeding rate and grain yield. Eur. J. Agron. 2022, 139, 126529. [Google Scholar] [CrossRef]
135. Singh, S.; Gummadi, S.N. Two-stage seeding strategy and its multi-response optimization for enhanced xylitol production by Debaryomyces nepalensis NCYC 3413. Bioresour. Technol. 2024, 413, 131469. [Google Scholar] [CrossRef] [PubMed]
136. Ciampitti, I. Yield responses to planting density for US modern corn hybrids: A synthesis-analysis. Crop. Sci. 2016, 56, 2802–2817. [Google Scholar]
137. Assefa, Y.; Carter, P.; Hinds, M.; Bhalla, G.; Schon, R.; Jeschke, M.; Paszkiewicz, S.; Smith, S.; Ciampitti, I.A. Analysis of long-term study indicates both agronomic optimal plant density and increased maize yield per plant contributed to yield gain. Sci. Rep. 2018, 8, 4937. [Google Scholar] [CrossRef] [PubMed]
138. Wang, F.; Dong, Z.; Wu, Z.; Fang, K. Optimization of maize planting density and fertilizer application rate based on BP neural network. Trans. Chin. Soc. Agric. Eng. 2017, 33, 92–99. [Google Scholar] [CrossRef]
139. Shahhosseini, M.; Hu, G.; Archontoulis, S.V. Forecasting corn yield with machine learning ensembles. Front. Plant Sci. 2020, 11, 1120. [Google Scholar] [CrossRef]
140. Wang, J.; Lv, Z.; Zhao, M.; Wang, Z. Design and experiment of rice side-deep variable rate fertilization control system based on prescription diagrams. Trans. Chin. Soc. Agric. Mach. 2024, 55, 151–162. [Google Scholar]
141. Munnaf, M.A.; Haesaert, G.; Van Meirvenne, M.; Mouazen, A.M. Map-based site-specific seeding of consumption potato production using high-resolution soil and crop data fusion. Comput. Electron. Agric. 2020, 178, 105752. [Google Scholar] [CrossRef]
142. Available online: https://drybeanagronomy.ca/dry-bean-seeding-rate-project-results/ (accessed on 17 November 2024).
143. Zhu, Q.; Wu, G.; Luo, C.; Wei, X.; Wang, X.; Meng, Z. Design of multipath precision fertilizer and sowing control system based on attitude real-time monitoring. Trans. Chin. Soc. Agric. Mach. 2018, 49, 155–163. [Google Scholar]
144. Chen, J.; Li, Y.; Tan, C.; Liu, C. Design and test of capacitive detection system for wheat seeding quantity. Trans. Chin. Soc. Agric. Eng. 2018, 34, 51–58. [Google Scholar]
145. Xie, C.; Zhang, D.; Yang, L.; Cui, T.; Yu, T.; Wang, D.; Xiao, T. Experimental analysis on the variation law of sensor monitoring accuracy under different seeding speeds and seeding spacing. Comput. Electron. Agric. 2021, 189, 106369. [Google Scholar] [CrossRef]
146. Zhang, J.; Hou, Y.; Ji, W.; Zheng, P.; Yan, S.; Hou, S.; Cai, C. Evaluation of a real-time monitoring and management system of soybean precision seed metering devices. Agronomy 2023, 13, 541. [Google Scholar] [CrossRef]
147. Okopnik, D.L.; Falate, R. Usage of the DFRobot RB-DFR-49 infrared sensor to detect maize seed passage on a conveyor belt. Comput. Electron. Agric. 2014, 102, 106–111. [Google Scholar] [CrossRef]
148. Ji, C.; Chen, X.; Chen, J.; Wang, S.; He, P. Monitoring system for working performance of no-tillage corn precision seeder. Trans. Chin. Soc. Agric. Mach. 2016, 47, 1–6. [Google Scholar]
149. Available online: https://dickey-john.com/products/sensors/blockage-sensors/hy-rate-grain-drill (accessed on 17 November 2024).
150. Available online: https://www.mcelettronica.it/en/product/uni-seeder/ (accessed on 17 November 2024).
151. Available online: https://i-xeed.com/project/ds2000i-seed-sensor/ (accessed on 17 November 2024).
152. Available online: https://mueller-elektronik.de/en/produkte/plantirium-sensor-2/?category=486#produkt (accessed on 17 November 2024).
153. Available online: https://www.mcelettronica.it/en/product/maxi-seeder-tin-counter-photocell/ (accessed on 17 November 2024).
154. Available online: https://precisionagsolutions.net/product/wavevision-seed-sensor/ (accessed on 17 November 2024).
155. Kamgar, S.; Noei-Khodabadi, F.; Shafaei, S.M. Design, development and field assessment of a controlled seed metering unit to be used in grain drills for direct seeding of wheat. Inf. Process. Agric. 2015, 2, 169–176. [Google Scholar] [CrossRef]
156. Huang, D.; Zhu, T.; Jia, H.; Yu, T.; Yan, J. Remote monitoring system for corn seeding quality based on GPS and GPRS. Trans. Chin. Soc. Agric. Eng. 2016, 32, 162–168. [Google Scholar]
157. Lev, J.; Křepčík, V.; Prošek, V.; Kumhála, F. Capacitive throughput sensor for plant materials—Effects of frequency and moisture content. Comput. Electron. Agric. 2017, 133, 22–29. [Google Scholar] [CrossRef]
158. Besharati, B.; Navid, H.; Karimi, H.; Behfar, H.; Eskandari, I. Development of an infrared seed-sensing system to estimate flow rates based on physical properties of seeds. Comput. Electron. Agric. 2019, 162, 874–881. [Google Scholar] [CrossRef]
159. Karimi, H.; Navid, H.; Besharati, B.; Behfar, H.; Eskandari, I. A practical approach to comparative design of non-contact sensing techniques for seeding rate detection. Comput. Electron. Agric. 2017, 142, 165–172. [Google Scholar] [CrossRef]
160. Zhao, B.; Fan, X.; Zhou, L.; Li, Y.; Che, Y.; Niu, K. Design and test of piezoelectric flow sensor for pneumatic seeder. Trans. Chin. Soc. Agric. Mach. 2020, 51, 55–61. [Google Scholar]
161. Rossi, S.; Rubio Scola, I.; Bourges, G.; Šarauskis, E.; Karayel, D. Improving the seed detection accuracy of piezoelectric impact sensors for precision seeders. Part II: Evaluation of different plate materials. Comput. Electron. Agric. 2023, 215, 108448. [Google Scholar] [CrossRef]
162. Gierz, Ł.; Paszkiewicz, B.K. PVDF Piezoelectric Sensors for Seeds Counting and Coulter Clogging Detection in Sowing Process Monitoring. J. Eng. 2020, 2020, 2676725. [Google Scholar] [CrossRef]
163. Ding, Y.; Wang, K.; Liu, X.; Liu, W.; Chen, L.; Liu, W.; Du, C. Research progress of seeding detection technology for medium and small size seeds. Trans. Chin. Soc. Agric. Eng. 2021, 37, 30–41. [Google Scholar]
164. Zhou, L.; Zhang, X.; Yuan, Y. Design of capacitance seed rate sensor of wheat planter. Trans. Chin. Soc. Agric. Eng. 2010, 26, 99–103. [Google Scholar]
165. Zhou, L.; Wang, S.; Zhang, X.; Yuan, Y.; Zhang, J. Seed monitoring system for corn planter based on capacitance signal. Trans. Chin. Soc. Agric. Eng. 2012, 28, 16–21. [Google Scholar]
166. Ding, Y.; Zhu, K.; Wang, K.; Liu, X.; Du, C. Development of monitoring device for medium and small size seed flow based on thin surface laser-silicon photocell. Trans. Chin. Soc. Agric. Eng. 2019, 35, 12–20. [Google Scholar]
167. Liu, W.; Hu, J.; Zhao, X.; Pan, H.; Lakhiar, I.A.; Wang, W.; Zhao, J. Development and experimental analysis of a seeding quantity sensor for the precision seeding of small seeds. Sensors 2019, 19, 5191. [Google Scholar] [CrossRef] [PubMed]
168. Lu, C.; Fu, Q.; Zhao, C.; Mei, H.; Meng, Z.; Dong, J.; Gao, N.; Wang, X.; Li, L. Design and experiment on real-time monitoring system of wheat seeding. Trans. Chin. Soc. Agric. Eng. 2017, 33, 32–40. [Google Scholar]
169. Liu, W.; Hu, J.; Zhao, X.; Pan, H.; Lakhiar, I.A.; Wang, W. Development and experimental analysis of an intelligent sensor for monitoring seeding rate based on a seed flow reconstruction technique. Comput. Electron. Agric. 2019, 164, 104899. [Google Scholar] [CrossRef]
170. Che, Y.; Wei, L.; Liu, X.; Li, Z.; Wang, F. Design and experiment of seeding quality infrared monitoring system for no-tillage seeder. Trans. Chin. Soc. Agric. Eng. 2017, 33, 11–16. [Google Scholar]
171. Mussadiq, Z.; Laszlo, B.; Helyes, L.; Gyuricza, C. Evaluation and comparison of open source program solutions for automatic seed counting on digital images. Comput. Electron. Agric. 2015, 117, 194–199. [Google Scholar] [CrossRef]
172. Jing, H.; Qiu, L.; Qian, W. Design and experiment of seeding monitoring system for seed drill. J. Shenyang Agric. Univ. 2010, 41, 743–746. [Google Scholar]
173. Zhao, L.; Zhang, Z.; Wang, C.; Jian, S.; Liu, T.; Cui, D.; Ding, X. Design of monitoring system for wheat precision seeding-fertilizing machine based on variable distance photoelectric sensor. Trans. Chin. Soc. Agric. Eng. 2018, 34, 27–34. [Google Scholar]
174. Qi, B.; Zhang, W.; Yu, S.; Ji, Y.; Li, K.; Zhang, S. Establishment of seeding amount control model for centralized pneumatic metering system for rice. Trans. Chin. Soc. Agric. Mach. 2018, 49, 125–131. [Google Scholar]
175. Zhang, K.; Zhang, Z.; Wang, S.; Yang, C.; Yu, Y.; Li, H. Design and experiment of electronic seeding system based on response surface method. Int. J. Comput. Integr. Manuf. 2020, 33, 982–990. [Google Scholar] [CrossRef]
176. Available online: https://www.agriexpo.cn/prod/dickey-john/product-168816-167342.html (accessed on 17 November 2024).
177. Available online: https://www.mcelettronica.it/en/product/esd/ (accessed on 17 November 2024).
178. Available online: https://www.precisionagriservices.com/brands/ag-leader/incommand-1200 (accessed on 17 November 2024).
179. Available online: https://agriculture.newholland.com/apac/zh-cn/precision-land-management/products/displays/intelliview-iv-display (accessed on 17 November 2024).
180. Ding, Y.; Yang, L.; Zhang, D.; Cui, T.; He, X.; Zhong, X. Control system of motor-driving maize precision planter based on GPS speed measurement. Trans. Chin. Soc. Agric. Mach. 2018, 49, 42–49. [Google Scholar]
181. Zhai, J.; Xia, J.; Zhou, Y.; Zhang, S. Design and experimental study of the control system for precision seed-metering device. Int. J. Agric. Biol. Eng. 2014, 7, 13–18. [Google Scholar]
182. Zhao, X.; Chen, L.; Gao, Y.; Yang, S.; Zhai, C. Optimization method for accurate positioning seeding based on sowing decision. Int. J. Agric. Biol. Eng. 2021, 14, 3. [Google Scholar] [CrossRef]
183. He, X.; Cui, T.; Zhang, D.; Wei, J.; Wang, M.; Yu, Y.; Liu, Q.; Yan, B.; Zhao, D.; Yang, L. Development of an electric-driven control system for a precision planter based on a closed-loop PID algorithm. Comput. Electron. Agric. 2017, 136, 184–192. [Google Scholar] [CrossRef]
184. He, X.; Ding, Y.; Zhang, D.; Yang, L.; Cui, T.; Zhong, X. Development of a variable-rate seeding control system for corn planters Part I: Design and laboratory experiment. Comput. Electron. Agric. 2019, 162, 318–327. [Google Scholar] [CrossRef]
185. He, X.; Ding, Y.; Zhang, D.; Yang, L.; Cui, T.; Zhong, X. Development of a variable-rate seeding control system for corn planters Part II: Field performance. Comput. Electron. Agric. 2019, 162, 309–317. [Google Scholar] [CrossRef]
186. Wang, S.; Zhao, B.; Yi, S.; Zhao, X.; Liu, Z.; Sun, Y. Electric-driven mung bean precision seeder control system based on IGWO-LADRC. Trans. Chin. Soc. Agric. Mach. 2022, 53, 87–98. [Google Scholar]
187. Yu, Y.; Hu, Y.; Shang, S.; Diao, L.; Ge, R.; Zhang, X. Design of motor-driven precision seed-metering device with improved fuzzy PID controller for small peanut planters. Int. J. Agric. Biol. Eng. 2023, 16, 136–144. [Google Scholar] [CrossRef]
188. Chen, L.; Xie, B.; Li, Z.; Yang, L.; Chen, Y. Design of control system of maize precision seeding based on double closed-loop PID fuzzy algorithm. Trans. Chin. Soc. Agric. Eng. 2018, 34, 33–41. [Google Scholar]
189. Wang, W.; Wu, K.; Zhang, Y.; Wang, M.; Zhang, C.; Chen, L. The development of an electric-driven control system for a high-speed precision planter based on the double closed-loop fuzzy PID algorithm. Agronomy 2022, 12, 945. [Google Scholar] [CrossRef]
190. Ding, Y.; Liu, W.; Dong, W.; Chen, L.; Liu, X.; Jin, W. Design and Experiment of Seed Metering Device for Rapeseed Based on Seeding Frequency Feedback. Trans. Chin. Soc. Agric. Mach. 2021, 52, 73–82+116. [Google Scholar]
191. Wang, S.; Yu, Y.; Yang, C.; Liu, L.; Zhang, Y.; Zhang, Z.; Li, H. Experiment and Research of Seeding Electromechanical Control Seeding System Based on Fuzzy Control Strategy. J. Intell. Fuzzy Syst. 2019, 38, 453–462. [Google Scholar] [CrossRef]
192. Hu, J.; Zhao, X.; Liu, W.; Yao, M.; Zhao, J. Development of a Seeding Control Method Based on Seed Height in the Hopper of a Precision Wheat Drill. Appl. Eng. Agric. 2021, 37, 1131–1138. [Google Scholar] [CrossRef]
193. Liu, W.; Hu, J.; Zhao, X.; Yao, M.; Lakhiar, I.A.; Zhao, J.; Liu, J.; Wang, W. An Adaptive Roller Speed Control Method Based on Monitoring Value of Real-Time seeding rate for Flute-Roller Type Seed-Metering Device. Sensors 2021, 21, 80. [Google Scholar] [CrossRef]
194. Ding, Y.; Chen, C.; Yu, H.; Zhang, H.; Dou, X.; Liu, Z. Self-Correcting Method for Application Rate Control Parameters of Wheat Seed Drill Machine. Trans. Chin. Soc. Agric. Mach. 2023, 54, 31–37. [Google Scholar]
195. Yan, B.; Fu, W.; Wu, G.; Xiao, Y.; Meng, Z. Seed Location Prediction Method of Maize High-Height Precision Planting Based on Satellite Positioning. Trans. Chin. Soc. Agric. Mach. 2021, 52, 44–54. [Google Scholar]
196. Zhang, Z.; Dong, W.; Xiong, Z.; Hu, Z.; Wang, D.; Ding, Y. Design and Experiment of Fuzzy Adaptive Pure Pursuit Control of Crawler-Type Rape Seeder. Trans. Chin. Soc. Agric. Mach. 2021, 52, 105–114. [Google Scholar]
197. Ding, Y.; He, Z.; Xia, Z.; Peng, J.; Wu, T. Design of Navigation Immune Controller of Small Crawler-Type Rape Seeder. Trans. Chin. Soc. Agric. Eng. 2019, 35, 12–20. [Google Scholar]
198. Yang, Y.; Li, Y.; Wen, X.; Zhang, G.; Ma, Q.; Cheng, S.; Qi, J.; Xu, L.; Chen, L. An Optimal Goal Point Determination Algorithm for Automatic Navigation of Agricultural Machinery: Improving the Tracking Accuracy of the Pure Pursuit Algorithm. Comput. Electron. Agric. 2022, 194, 106760. [Google Scholar] [CrossRef]
199. Ding, C.; Ding, S.; Wei, X.; Mei, K. Output Feedback Sliding Mode Control for Path-Tracking of Autonomous Agricultural Vehicles. Nonlinear Dyn. 2022, 110, 2429–2445. [Google Scholar] [CrossRef]
200. Kayacan, E.; Ramon, H.; Kaynak, O.; Saeys, W. Towards Agrobots: Trajectory Control of an Autonomous Tractor Using Type-2 Fuzzy Logic Controllers. IEEE/ASME Trans. Mechatron. 2015, 20, 287–298. [Google Scholar] [CrossRef]
201. Miao, H.; Diao, P.; Xu, G.; Yao, W.; Song, Z.; Wang, W. Research on Decoupling Control for the Longitudinal and Lateral Dynamics of a Tractor Considering Steering Delay. Sci. Rep. 2022, 12, 13997. [Google Scholar] [CrossRef]
202. Xu, L.; Chen, Q.; Wang, L.; Yao, L. Path Tracking of Agricultural Vehicles Based on 4WIS–4WID Structure and Fuzzy Control. Appl. Sci. 2023, 13, 8495. [Google Scholar] [CrossRef]
203. Xu, L.; Yang, Y.; Chen, Q.; Fu, F.; Yang, B.; Yao, L. Path Tracking of a 4WIS–4WID Agricultural Machinery Based on Variable Look-Ahead Distance. Appl. Sci. 2022, 12, 8651. [Google Scholar] [CrossRef]
204. He, J.; Hu, L.; Wang, P.; Liu, Y.; Man, Z.; Tu, T.; Yang, L.; Li, Y.; Yi, Y.; Li, W.; et al. Path Tracking Control Method and Performance Test Based on Agricultural Machinery Pose Correction. Comput. Electron. Agric. 2022, 200, 107185. [Google Scholar] [CrossRef]
205. Ding, Y.; Wang, L.; Li, Y.; Li, D. Model Predictive Control and Its Application in Agriculture: A Review. Comput. Electron. Agric. 2018, 151, 104–117. [Google Scholar] [CrossRef]
206. Fan, X.; Wang, J.; Wang, H.; Yang, L.; Xia, C. LQR Trajectory Tracking Control of Unmanned Wheeled Tractor Based on Improved Quantum Genetic Algorithm. Machines 2023, 11, 62. [Google Scholar] [CrossRef]
207. Chen, X.; Qiang, Y. Dual Predictive Model Adaptive Switching Control for Directional Control of Tractor Semitrailer Combinations. Adv. Mech. Eng. 2023, 15, 16878132231189311. [Google Scholar]
208. Zhou, B.; Su, X.; Yu, H.; Guo, W.; Zhang, Q. Research on Path Tracking of Articulated Steering Tractor Based on Modified Model Predictive Control. Agriculture 2023, 13, 871. [Google Scholar] [CrossRef]
209. Wu, T.; Li, Y.; Lin, H.; Gong, L.; Liu, C. Fast Terminal Sliding Mode Control for Autonomous Rice Seeding Machine Based on Disturbance Observer. Trans. Chin. Soc. Agric. Mach. 2021, 52, 24–31. [Google Scholar]
210. Yin, C.; Wang, S.; Gao, J.; Li, X. Trajectory Tracking for Agricultural Tractor Based on Improved Fuzzy Sliding Mode Control. PLoS ONE 2023, 18, 0283961. [Google Scholar] [CrossRef]
211. Jiao, J.; Chen, J.; Qiao, Y.; Wang, M.; Gu, L.; Li, Z. Adaptive Sliding Mode Control of Trajectory Tracking Based on DC Motor Drive for Agricultural Tracked Robot. Trans. Chin. Soc. Agric. Eng. 2018, 34, 64–70. [Google Scholar]
212. Wang, L.; Zhu, S.; Liu, Y.; Du, X.; Zhu, Z.; Zhai, Z. A Novel Path Tracking Method of Tractor Based on Improved Second-Order Sliding Mode Considering Front Wheel Steering Angle Compensation. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2022, 237, 095440702211083. [Google Scholar] [CrossRef]
213. Wang, S.; Yin, C.; Gao, J.; Sun, Q. Lateral Displacement Control for Agricultural Tractor Based on Cascade Control Structure. Int. J. Control Autom. Syst. 2020, 18, 2375–2385. [Google Scholar] [CrossRef]
214. Cheng, J.; Zhang, B.; Zhang, C.; Zhang, Y.; Shen, G. A Model-Free Adaptive Predictive Path-Tracking Controller with PID Terms for Tractors. Biosyst. Eng. 2024, 242, 38–49. [Google Scholar] [CrossRef]
215. Ding, C.; Wei, X.; Mei, K. Adaptive Second-Order Sliding Mode Path Tracking Control for Agricultural Tractors. Control Theory Appl. 2023, 40, 1287–1295. [Google Scholar]
216. Khalaji, A.K. PID-Based Target Tracking Control of a Tractor-Trailer Mobile Robot. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 233, 4776–4787. [Google Scholar] [CrossRef]
217. Yan, J.; Zhang, W.; Liu, Y.; Pan, W.; Hou, X.; Liu, Z. Autonomous Trajectory Tracking Control Method for an Agricultural Robotic Vehicle. Int. J. Agric. Biol. Eng. 2024, 17, 215–224. [Google Scholar] [CrossRef]
218. Yin, J.; Zhu, D.; Liao, J.; Zhu, G.; Wang, Y.; Zhang, S. Automatic Steering Control Algorithm Based on Compound Fuzzy PID for Rice Transplanter. Appl. Sci. 2019, 9, 2666. [Google Scholar] [CrossRef]
219. Liu, Z.; Yue, M.; Guo, L.; Zhang, Y. Trajectory Planning and Robust Tracking Control for a Class of Active Articulated Tractor-Trailer Vehicle with On-Axle Structure. Eur. J. Control 2020, 54, 87–98. [Google Scholar] [CrossRef]
220. Lu, E.; Xue, J.; Chen, T.; Jiang, S. Robust Trajectory Tracking Control of an Autonomous Tractor-Trailer Considering Model Parameter Uncertainties and Disturbances. Agriculture 2023, 13, 869. [Google Scholar] [CrossRef]
221. Zhao, H.; Zhou, S.; Chen, W.; Miao, Z.; Liu, Y.H. Modeling and Motion Control of Industrial Tractor–Trailers Vehicles Using Force Compensation. IEEE/ASME Trans. Mechatron. 2021, 26, 645–656. [Google Scholar] [CrossRef]
222. Khanpoor, A.; Khalaji, A.K.; Moosavian, S.A.A. Modeling and Control of an Underactuated Tractor–Trailer Wheeled Mobile Robot. Robotica 2017, 35, 2297–2318. [Google Scholar] [CrossRef]
223. Wu, C.; Wu, S.; Wen, L. Variable Curvature Path Tracking Control for the Automatic Navigation of Tractors. Trans. Chin. Soc. Agric. Eng. 2022, 38, 1–7. [Google Scholar]
224. Hou, Y.; Xu, X. High-Speed Lateral Stability and Trajectory Tracking Performance for a Tractor-Semitrailer with Active Trailer Steering. PLoS ONE 2022, 17, 0277358. [Google Scholar] [CrossRef]
225. Liu, L.; Wang, X.; Wang, X.; Xie, J.; Liu, H.; Li, J.; Wang, P.; Yang, X. Path Planning and Tracking Control of Tracked Agricultural Machinery Based on Improved A* and Fuzzy Control. Electronics 2024, 13, 188. [Google Scholar] [CrossRef]
226. An, G.; Zhong, Z.; Yang, S.; Yang, L.; Jin, C.; Du, J.; Yin, X. EASS: An Automatic Steering System for Agricultural Wheeled Vehicles Using Fuzzy Control. Comput. Electron. Agric. 2024, 217, 108544. [Google Scholar] [CrossRef]
227. Ding, Q.; Qi, S.; You, Y.; Xing, Q.; Xu, G.; Liang, L. Field Bench Test of Seeding Unit Based on Precise Seeding Depth Control Objective. Trans. Chin. Soc. Agric. Mach. 2022, 53, 100–107. [Google Scholar]
228. Ma, R.; Wei, L.; Zhao, B.; Zhou, L.; Liu, Y.; Xing, G. Rotary Tillage Depth Detection Based on Multi-Sensor Data Fusion. Trans. Chin. Soc. Agric. Mach. 2024, 55, 52–64. [Google Scholar]
229. Fu, W.; Dong, J.; Mei, H.; Gao, N.; Lu, C.; Zhang, J. Design and Test of Maize Seeding Unit Downforce Control System. Trans. Chin. Soc. Agric. Mach. 2018, 49, 68–77. [Google Scholar]
230. Xia, J.; Li, D.; Liu, G.; Cheng, J.; Zheng, K.; Luo, C. Design and Test of Electro-Hydraulic Monitoring Device for Hitch Tillage Depth Based on Measurement of Tractor Pitch Angle. Trans. Chin. Soc. Agric. Mach. 2021, 52, 386–395. [Google Scholar]
231. Wen, L.; Fan, X.; Liu, Z.; Zhang, Y. The Design and Development of the Precision Planter Sowing Depth Control System. Sens. Transducers 2014, 162, 53–58. [Google Scholar]
232. Jia, H.; Guo, M.; Yu, H.; Li, Y.; Feng, X.; Zhao, J.; Qi, J. An Adaptable Tillage Depth Monitoring System for Tillage Machine. Biosyst. Eng. 2016, 151, 187–199. [Google Scholar] [CrossRef]
233. Zhang, B.-W.; Zhang, W.; Qi, L.; Fu, H.; Yu, L.-J.; Li, R.; Zhao, Y.; Ma, X. Information Acquisition System of Multipoint Soil Surface Height Variation for Profiling Mechanism of Seeding Unit of Precision Corn Planter. Int. J. Agric. Biol. Eng. 2018, 11, 58–64. [Google Scholar] [CrossRef]
234. Nielsen, S.K.; Munkholm, L.J.; Lamandé, M.; Nørremark, M.; Skou-Nielsen, N.; Edwards, G.T.C.; Green, O. Seed Drill Instrumentation for Spatial Coulter Depth Measurements. Comput. Electron. Agric. 2017, 141, 207–214. [Google Scholar] [CrossRef]
235. Nielsen, S.K.; Munkholm, L.J.; Lamandé, M.; Nørremark, M.; Edwards, G.T.C.; Green, O. Seed Drill Depth Control System for Precision Seeding. Comput. Electron. Agric. 2018, 144, 174–180. [Google Scholar] [CrossRef]
236. Suomi, P.; Oksanen, T. Automatic Working Depth Control for Seed Drill Using ISO 11783 Remote Control Messages. Comput. Electron. Agric. 2015, 116, 30–35. [Google Scholar] [CrossRef]
237. Huang, D.; Zhu, L.; Jia, H.; Yu, T. Automatic Control System of Seeding Depth Based on Piezoelectric Film for No-Till Planter. Trans. Chin. Soc. Agric. Eng. 2015, 46, 1–8. [Google Scholar]
238. Jia, H.; Guo, H.; Guo, M.; Wang, L.; Zhao, J.; Fan, X. Finite Element Analysis of Performance on Elastic Press Wheel of Row Sowing Plow Machine for Covering with Soil and Its Experiment. Trans. Chin. Soc. Agric. Eng. 2015, 31, 9–16. [Google Scholar]
239. Gao, Y.; Wang, X.; Yang, S.; Zhao, X.; Dou, H.; Zhao, C. Design and Test of Pneumatic Downforce Control System for Planting. Trans. Chin. Soc. Agric. Mach. 2019, 50, 19–29. [Google Scholar]
240. Jing, H.; Zhang, D.; Wang, Y.; Yang, L.; Fan, C.; Zhao, H.; Wu, H.; Zhang, Y.; Pei, J.; Cui, T. Development and Performance Evaluation of an Electro-Hydraulic Downforce Control System for Planter Row Unit. Comput. Electron. Agric. 2020, 172, 105073. [Google Scholar] [CrossRef]
241. Zhao, J.; Zhu, L.; Jia, H.; Huang, D.; Guo, M.; Cong, Y. Automatic Depth Control System for a No-Till Seeder. Int. J. Agric. Biol. Eng. 2018, 11, 115–121. [Google Scholar] [CrossRef]
242. Zhou, L.; Ma, Y.; Zhou, H.; Niu, K.; Zhao, B.; Wei, L.; Bai, S.; Zheng, Y.; Zhang, W. Design and Test of Sowing Depth Measurement and Control System for No-Till Corn Seeder Based on Integrated Electro-Hydraulic Drive. Appl. Sci. 2023, 13, 5823. [Google Scholar] [CrossRef]
243. Li, M.; Xia, X.; Zhu, L.; Zhou, R.; Huang, D. Intelligent Sowing Depth Regulation System Based on Flex Sensor and Mamdani Fuzzy Model for a No-Till Planter. Int. J. Agric. Biol. Eng. 2021, 14, 145–152. [Google Scholar] [CrossRef]
244. Bullock, D.S.; Bullock, D.; Nafziger, E.D.; Stafford, J.V. Variable rate seeding of maize in the Midwestern USA. In Proceedings of the 2nd European Conference on Precision Agriculture, Odense, Denmark, 11–15 July 1999. [Google Scholar]
245. Velandia, M.; Buschermohle, M.; Larson, J.A.; Thompson, N.M.; Jernigan, B.M. The economics of automatic section control technology for planters: A case study of middle and west Tennessee farms. Comput. Electron. Agric. 2013, 95, 1–10. [Google Scholar] [CrossRef]
246. Dong, L.; Yang, T.; Li, R.; Ma, L.; Feng, Y.; Li, Y. Grain Yield, Rice Seedlings and Transplanting Quantity in Response to Decreased Sowing Rate under Precision Drill Sowing. Agriculture 2024, 14, 1745. [Google Scholar] [CrossRef]

Фото: Посевной комплекс SH производства Ростсельмаш (сеялка-культиватор). Источник: wikipedia
Liu W, Zhou J, Zhang T, Zhang P, Yao M, Li J, Sun Z, Ma G, Chen X, Hu J. Key Technologies in Intelligent Seeding Machinery for Cereals: Recent Advances and Future Perspectives. Agriculture. 2025; 15(1):8. https://doi.org/10.3390/agriculture15010008
Перевод статьи «Key Technologies in Intelligent Seeding Machinery for Cereals: Recent Advances and Future Perspectives» авторов Liu W, Zhou J, Zhang T, Zhang P, Yao M, Li J, Sun Z, Ma G, Chen X, Hu J., оригинал доступен по ссылке. Лицензия: CC BY. Изменения: переведено на русский язык

















































































































Комментарии (0)