Проектирование системы прототипа акустической сети для отпугивания птиц-вредителей на сельскохозяйственных полях
Ущерб урожаю, причиняемый птицами-вредителями, является серьезной проблемой, особенно в странах с низким уровнем дохода. В данной статье описывается прототип системы для обнаружения птиц-вредителей с использованием нейросетевой модели Conv1D с последующими отпугивающими действиями для снижения их присутствия на фермах.
Аннотация
Для сбора данных на фермах были размещены акустические регистраторы, а также использованы существующие акустические библиотеки. Звуки видов птиц-вредителей были идентифицированы и размечены. Размеченные данные были использованы в платформе Edge Impulse для обучения модели tinyML на основе архитектуры Conv1D с целью обнаружения целевых видов птиц. Обученная модель была развернута на микроконтроллерах Arduino Nano 33 BLE Sense (узлы) и XIAO (базовая станция) для обнаружения птиц-вредителей; на основе детекции проигрывались отпугивающие звуки. Модель достигла точности 96,1% на этапе обучения и 92,99% на этапе тестирования. F1-мера на тестовой выборке составила 0,94, а ROC-AUC — 0,99, что указывает на высокую дискриминационную способность модели. Прототип выполнял вывод (инференс) за 53 мс, используя лишь 14,8 КБ пиковой оперативной памяти и всего 43,8 КБ флеш-памяти для хранения модели. Результаты полевого развертывания прототипа продемонстрировали успешное обнаружение, запуск отпугивающих действий и отправку SMS-уведомлений. Дальнейшее развитие этого нового интегрированного и устойчивого решения предоставит еще один инструмент для борьбы с птицами-вредителями.
1. Введение
Птицы-вредители создают серьезные проблемы для аграриев, нанося значительный ущерб на каждой стадии роста растений. В странах Африки к югу от Сахары мелкие фермеры, выращивающие зерновые и бобовые культуры, сталкиваются с этой проблемой каждый сельскохозяйственный сезон. Различные виды птиц повреждают посевы на разных этапах производственного цикла, таких как посев, всходы и созревание, что приводит к экономическим и урожайным потерям для фермеров [1,2,3]. Например, только в Сенегале ущерб от птиц на рисовых полях был оценен в 15% [4]. В Африке к югу от Сахары Хирон и др. [5] estimated, что ущерб посевам сорго, причиняемый птицами-вредителями, может достигать 60%. На ущерб посевам влияют плотность популяции птиц, сезон, площадь посевов и структура земледелия [4,6,7,8,9]. Потери от птиц могут иметь критически важное значение для мелких фермеров в Африке к югу от Сахары, поскольку их урожай часто служит как для пропитания, так и для дохода, при этом мелкие фермеры вносят приблизительно 30% в общий объем производства продовольствия в регионе [10,11,12]. Птицы также могут распространять различные болезни сельскохозяйственных культур, дополнительно влияя на урожайность [13,14]. Стоимость ущерба и потерь урожая от птиц-вредителей в сельском хозяйстве угрожает продовольственной безопасности и экономическому процветанию. Однако некоторые птицы также были определены как важные участники борьбы с насекомыми, червями и саранчой [9,15,16]. Птицы также циркулируют питательные вещества, рассеивают семена и изменяют окружающую среду, что может приносить пользу производственной экосистеме фермы [17]. Следовательно, необходимо проявлять осторожность в том, какие виды птиц отпугивать с фермы.
В попытках уменьшить негативное влияние ущерба от птиц на посевы использовались различные меры борьбы с птицами-вредителями. Традиционно в Африке к югу от Сахары фермеры использовали пугала, светоотражающие ленты, химикаты и рабочих для отпугивания птиц с полей [18,19,20,21]. Эти подходы могут быть трудоемкими, неэффективными и неустойчивыми [4,21,22]. Дополнительно, использование химических репеллентов некоторыми фермерами также сопряжено с рисками для здоровья потребителей продукции и наносит ущерб биоразнообразию. Современные усилия по контролю над птицами исследуют технологические решения, например, обзоры техник отпугивания птиц представлены в [14,23,24].
Один из подходов заключался в создании систем отпугивания птиц-вредителей на основе беспилотных летательных аппаратов (БПЛА). БПЛА, обычно известные как дроны, — это системы, которые запускаются в воздух, чтобы вести себя как хищные птицы и отпугивать птиц-вредителей с территории фермы [20,25,26]. Некоторые системы на основе дронов и наземные системы используют компьютерное зрение для обнаружения птиц с последующим отпугивающим действием [27,28]. Однако проблема визуальных систем отпугивания ограничена полем обзора, и эти устройства дороги в приобретении и обслуживании. Было использовано несколько акустических технологий отпугивания птиц, такие как газовые пушки, выстрелы из ружей, AV-сигнализация, звуки хищников, ультразвуковые звуки и многие другие, чтобы отпугивать птиц с сельскохозяйственных полей [21,23,24,29,30]. Хотя эти техники в определенной степени работали, со временем они становятся неэффективными из-за привыкания птиц [21,31,32]. Привыкание птиц можно объяснить режимом и частотой воспроизведения звуков. В большинстве случаев эти звуки воспроизводятся непрерывно или запрограммированы на включение через временные интервалы, что делает процесс монотонным и, следовательно, позволяет птицам обучаться и привыкать. Таким образом, проблема ущерба посевам от птиц-вредителей сохраняется даже сегодня, несмотря на множество предпринятых попыток решений.
Фермеры в Африке к югу от Сахары продолжают ожидать простую и эффективную систему отпугивания птиц-вредителей, которая может контролировать вторжение пернатых вредителей на сельскохозяйственные угодья. Фермеры хотят решение, которое может отпугивать птиц, а также предоставлять своевременную информацию о активности птиц-вредителей в поле. Проблемами для технологических решений являются стоимость, вычислительная мощность, доступ в интернет и доступ к источникам электроэнергии. Другие вопросы — это обнаружение птиц, привыкание птиц и необоснованное отпугивание полезных птиц. Наконец, во многих странах существуют ограничения на использование БПЛА и недостаточные возможности для разработки технологических решений для фермеров. Цель данной статьи — спроектировать и разработать прототип системы сети датчиков Интернета вещей (IoT) для обнаружения и отпугивания птиц-вредителей. Система может обнаруживать присутствие целевых видов птиц-вредителей с использованием акустических сигнатур с помощью граничных вычислений и активировать триггеры для отпугивания этих птиц с фермы в режиме, близком к реальному времени. Эта система предоставляет альтернативный способ для фермеров защитить посевы. Остальная часть статьи организована следующим образом: Раздел 2 описывает использованные методы и материалы; Раздел 3 представляет результаты; Раздел 4 посвящен обсуждению; и Раздел 5 содержит выводы.
2. Материалы и методы
В этом разделе представлен полный набор методов, использованных для создания прототипа. Сначала мы описываем, как мы собрали и промаркировали акустические данные, использованные для разработки модели для граничного обнаружения (Разделы 2.1 и 2.2). Затем мы описываем разработку модели с использованием Edge Impulse (Раздел 2.3). Это включает в себя процесс выбора признаков, обучение и тестирование модели. Затем мы описываем развертывание модели на аппаратной интеграции на базе Arduino и сценарии управления прототипом для акустической сети.
2.1. Сбор данных и район исследования
Данные для разработки модели были собраны с акустических регистраторов, размещенных на фермах (Рисунок 1), с дополнением воспроизведения записей из Xeno-canto и Библиотеки Макали, чтобы обеспечить наличие в обучающих данных как записей в естественных условиях, так и высококачественных записей. Полевые данные собирались в Восточной и Северной провинциях Руанды непосредственно перед сбором урожая. Регистраторы были установлены в рамках более крупного проекта по оценке акустической среды ферм. Частота дискретизации была установлена на 48 кГц, чтобы захватить широкий частотный диапазон для многих потенциальных источников звука, включая широкое разнообразие птичьих голосов. Данные из библиотек птичьих звуков воспроизводились онлайн и записывались с частотой дискретизации 32 кГц, потому что интересующие виды могли быть полностью захвачены на этой более низкой частоте дискретизации. Действительно, запись с частотой дискретизации 16 кГц была достаточной для нашего случая использования, поскольку почти все птичьи голоса группируются ниже звуковой частоты 8 кГц [33]. Дополнительно, мы в конечном итоге ограничили все полевые и библиотечные данные максимальной звуковой частотой 8 кГц, чтобы соответствовать частоте дискретизации 16 кГц нашего оборудования.

Рисунок 1. (a) Рабочие, создающие шум для отпугивания птиц-вредителей с бобовой фермы в кампусе Университета Руанды-Бусого. (b) Развертывание акустического мониторинга. Фото: D.K. Amenyedzi.
2.2. Разметка и подготовка данных
Набор данных был загружен в Raven Pro 1.6.5 [34] для прослушивания и визуализации частот вокализации птиц и других измерительных шкал, отображаемых в виде сонограмм в форме волны и спектрограмм. Raven Pro — это мощное программное обеспечение для акустического анализа, разработанное в Корнеллской лаборатории орнитологии для исследователей, интересующихся мониторингом дикой природы и анализом поведения животных. Он отображает форму волны и спектрограмму аудиофайлов, чтобы все сигнатуры вокализации могли быть просмотрены и пересмотрены. Программное обеспечение позволяет пользователям выбирать и маркировать сигнатуры calls или песен для дальнейшей обработки и анализа. Алгоритм обучающего детектора, реализованный в Raven Pro 1.6.5, был запущен по всему набору данных для идентификации видов в фермерской среде. Обучающий детектор позволяет предлагать идентификацию видов, которую пользователь должен проверить, чтобы подтвердить как истинное или ложное обнаружение.
Мы просмотрели сигнатуры голосов интересующих видов птиц и выбрали шесть распространенных птиц-вредителей из записей для создания и тестирования нашего прототипа. Были выбраны и размечены деревенские ткачи, белобровые чекановые горихвостки, обыкновенные астрильды, обыкновенные бюльбюли, цистиколы Чабба и желтолобые канарейки. Каждый аудиофайл имел длину от 1 до 3 секунд. Мы включили дополнительный известный вид птиц-вредителей, красноклювого квелеа, который не был найден в наших записях. Мы включили голоса красноклювого квелеа, доступные из библиотек xeno-canto и Macaulay. Красноклювый квелеа был описан как один из самых разрушительных видов птиц-вредителей на сельскохозяйственных полях в Африке к югу от Сахары [3,4,5]. Этот вид был включен в набор данных, чтобы масштабировать прототип отпугивания птиц-вредителей для тестирования в разных частях Африки, где этот вид может быть распространен. Размеченный набор данных содержит 8877 аудиофайлов для этого проекта (Таблица 1). Рисунок 2 иллюстрирует панели со спектрограммами видов птиц-вредителей и некоторых файлов звуков фонового шума в фермерской среде.
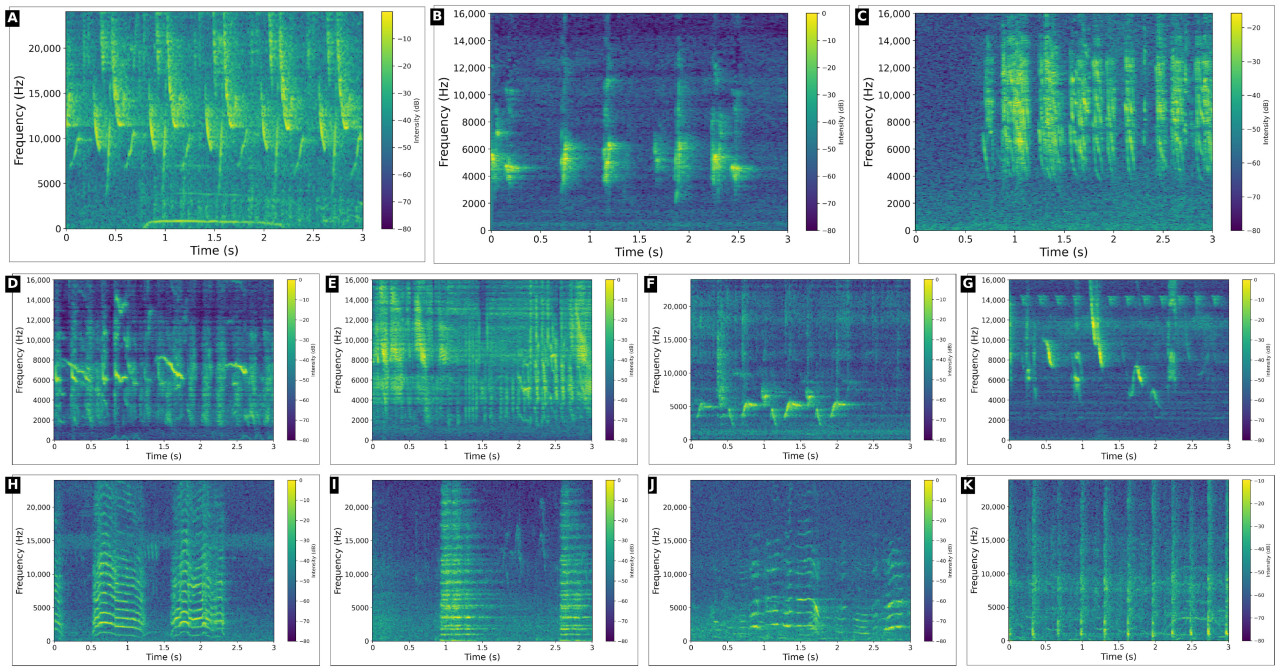
Рисунок 2. Спектрограммы, иллюстрирующие виды и звуки окружающей среды. Панели (A–G) представляют спектрограммы для нескольких видов-вредителей, а именно цистиколы Чабба, обыкновенного бюльбюля, обыкновенного астрильда, красноклювого квелеа, деревенского ткача, белобрового чеканового горихвостка и желтолобой канарейки, соответственно. Панель (H) — полезный вид птиц, ибис-хадада, и панели (I–K) — примеры фонового шума, т.е. звук автомобильного гудка, разговор детей и звуки погремушки, соответственно.
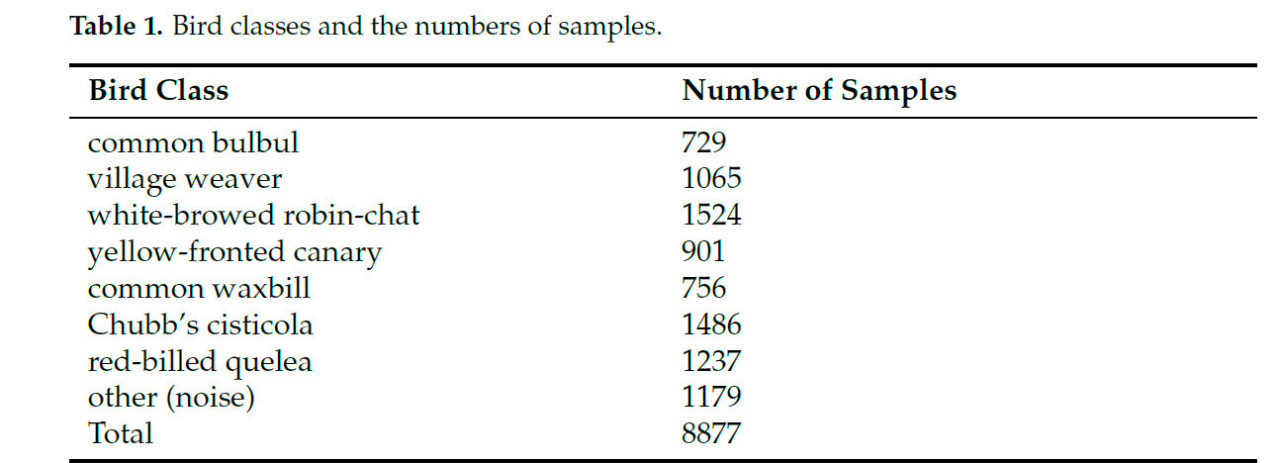
Таблица 1. Классы птиц и количество образцов.
2.3. Программная реализация в Edge Impulse
Алгоритм обнаружения птиц-вредителей был построен с помощью Edge Impulse. Edge Impulse описывается как ведущая платформа разработки граничных вычислений для мониторинга событий на конце сети [35,36]. Edge Impulse предоставляет платформу ИИ для граничных устройств для сбора данных, обучения и тестирования моделей, которые могут быть развернуты на устройствах с ограниченной памятью для граничных вычислений. Edge Impulse предоставляет полностью комплексное решение, включая сбор данных, предварительную обработку, обучение модели и развертывание, упрощая рабочий процесс разработки на граничном оборудовании с ограниченными вычислительными ресурсами, таком как Arduino Nano 33 BLE Sense. Для этого проекта использовалась бесплатная версия Edge Impulse. Из-за ограничений по времени вычислений и ресурсам бесплатной версии для академических исследований создание рабочей модели часто требует модификации настроек по умолчанию, поэтому вынуждает пользователя создавать очень эффективные модели. Дополнительно, из-за этих ограничений обработки нам не потребовалось аугментация данных, и мы использовали только реальные данные для наших образцов. Эти данные также по своей природе являются зашумленными.
2.3.1. Проектирование модели Edge Impulse для обнаружения птиц-вредителей
Edge Impulse предоставляет пошаговую процедуру для проектирования модели tinyML, подходящей для развертывания на граничном оборудовании. При обработке аудиоданных выбор подходящих признаков сигнала имеет ключевое значение для распознавания видов птиц в условиях окружающего шума. Существуют различные представления аудио-признаков, такие как сырая спектрограмма, Mel-кепстральные коэффициенты (MFCC) и Mel-фильтрбанк энергия (MFE) [37,38,39,40]. Edge Impulse делает доступными все три представления признаков для обработки аудио. Спектрограмма — это сырые данные, содержащие три признака: частоту, амплитуду и время. MFCC — это популярная техника извлечения признаков, разработанная для распознавания человеческой речи. MFCC преобразует и сжимает спектрограмму, создавая коэффициенты, представляющие спектральное содержание. MFE фильтрует распределение мощности спектрограммы для представления суммированных энергий в частоте и времени. Каждый из этих признаков представлен в двумерной форме.
Дополнительно, Edge Impulse предоставляет две нейросетевые архитектуры для классификации аудиоданных. Две нейронные сети — это одномерная сверточная (Conv1D) и двумерная сверточная (Conv2D) сеть [41], на вход которых подаются признаки, сгенерированные в процессе обработки сигнала. Мы экспериментировали и сравнивали эффективность этих архитектур для обнаружения вокализации птиц-вредителей. Чтобы использовать архитектуру Conv1D, многомерные признаки, сгенерированные в процессе выбора признаков, преобразуются в одномерную форму с помощью слоя reshape в Edge Impulse. Архитектура Conv1D работает с этими преобразованными признаками. Архитектура Conv2D работает с признаками напрямую.
Чтобы определить, какая комбинация техники извлечения признаков и модели является наиболее точной и подходящей для обнаружения птиц-вредителей, в Edge Impulse были проведены два набора экспериментов. Анализ результатов экспериментов также учитывал расчетную производительность на устройстве для комбинации техники извлечения признаков и конкретной модели. Edge Impulse позволил нам указать выбранное нами граничное оборудование, а именно BLE Sense. Мы стремились к балансу точности и производительности граничных вычислений.
Случайная подвыборка из 402 звуков видов птиц была загружена в Edge Impulse и разделена в соотношении 80/20 для обучения/тестирования, чтобы экспериментировать с тем, насколько хорошо любая из 3 комбинаций техник выбора признаков и моделей будет работать в обнаружении разных видов. Виды были помечены как wbrchat, streaky и weaver bird. Метки также были созданы для 102 образцов фона. Фоном были все другие источники звука, включая другие виды птиц, распространенные в районе исследования, разговоры людей, музыку, звуки мотоциклов и другие окружающие звуки, захваченные на месте. Каждый образец длился 3 секунды.
Размер окна для обработки на одну классификацию был установлен на 1500 мс, а размер увеличения окна был установлен на 500 мс для скольжения по выборочным данным с нулевым заполнением. Эти размеры больше, чем значения по умолчанию в Edge Impulse, которые, как автоматически определил Edge Impulse, были недостаточными. Напомним, что наш размеченный набор данных был собран с частотой дискретизации 32 или 48 кГц. Однако BLE Sense дискретизирует только до 16 кГц. Следовательно, чтобы соответствовать частотному диапазону BLE Sense, мы ограничили частотный предел в Edge Impulse до 16 кГц. Эти настройки были единообразными в каждом эксперименте.
Для представления признаков спектрограммы в Edge Impulse исходный аудиосигнал делится на кадры, и выполняется кратковременное преобразование Фурье (STFT) для преобразования каждого кадра в частотную область, чтобы получить последовательность во времени всех обнаруженных звуковых частот в форме, позволяющей визуализировать звук. Параметр настройки для длины кадра составлял 0.02 с, шаг кадра — 0.01 с, а длина БПФ была установлена на 128.
MFCC сжимает спектрограмму в коэффициенты для представления доминирующих звуков, оптимизированных для человеческого слуха. Параметры MFCC были установлены следующим образом: количество коэффициентов — 13, длина кадра — 0.02 с, шаг кадра — 0.02 с, количество фильтров в фильтр-банке — 32, длина БПФ — 256, и размер скользящего окна для нормализации — 101. Коэффициент предварительного выделения для применения был установлен по умолчанию 0.98 для фильтрации.
MFE сжимает спектрограмму во времени и частоте, преобразуя амплитуду в представление звуковой энергии. Настройки для MFE включали длину кадра 0.02, шаг кадра 0.01, количество фильтров 40, длину БПФ 256 и уровень шума -52 дБ. Рисунок 3 показывает спектрографическое представление одного и того же аудиофрагмента для каждой из трех форм выбора признаков. Несколько комбинаций настройки параметров были протестированы на этапе проб и ошибок.
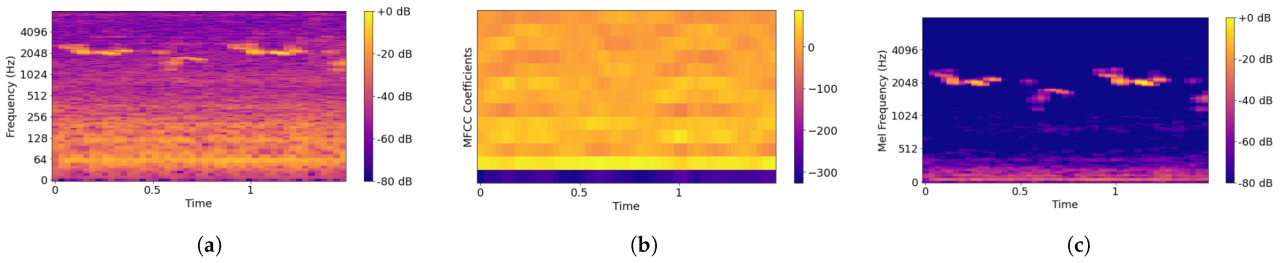
Рисунок 3. Визуальное представление одного и того же аудио в трех техниках выбора признаков. (a) Признак спектрограммы. (b) Признак MFCC. (c) Признак MFE.
Каждая техника выбора признаков была объединена с нейросетевыми архитектурами Conv1D и Conv2D по очереди, обучена и протестирована. Каждая техника выбора признаков требовала разных настроек параметров в Edge Impulse. Эти параметры настраивались методом проб и ошибок, в то время как модель имела конфигурацию по умолчанию. Конфигурация по умолчанию для архитектуры Conv1D составляла 8 нейронов и размер ядра 3 для первого скрытого слоя, и 16 нейронов и размер ядра 3 для второго скрытого слоя. Скорость отсева составляла 0.25 после каждого скрытого слоя, чтобы избежать переобучения, при скорости обучения 0.005. Некоторая настройка этих параметров архитектуры сети выполнялась во время тестирования выбора признаков, но настройки по умолчанию показали наилучшие результаты. Для Conv2D архитектура имела то же количество слоев и нейронов, скорость отсева была установлена на 0.5, а скорость обучения также была установлена на 0.005. Производительность шести комбинаций признаков и моделей сравнивалась на основе точности и F1 score. Точность относится к стандартной метрике, которая измеряет, насколько предсказание модели является правильным в задачах классификации. С другой стороны, F1 Score — это метрика, используемая для оценки производительности модели путем интеграции точности и полноты, чтобы предоставить всеобъемлющую меру в одном значении. Мы использовали обе метрики, чтобы получить полное понимание производительности моделей. Производительность на устройстве также оценивалась путем записи времени вывода, используемой пиковой оперативной памяти и объема флеш-памяти для хранения модели. Из комбинации производительности модели и на устройстве мы смогли решить, что MFE в сочетании с Conv1D является наиболее эффективной архитектурой.
После решения, что MFE в сочетании с Conv1D является хорошим вариантом для нашего прототипа, весь набор данных был загружен в Edge Impulse и разделен в соотношении 80/20 для обучения и тестирования. Чтобы создать импульс для обработки аудио, размер окна был установлен на 1500 мс, а увеличение окна составляло 750 мс на частоте 16 кГц с нулевым заполнением. Параметры для признаков MFE иллюстрируются в Таблице 2.
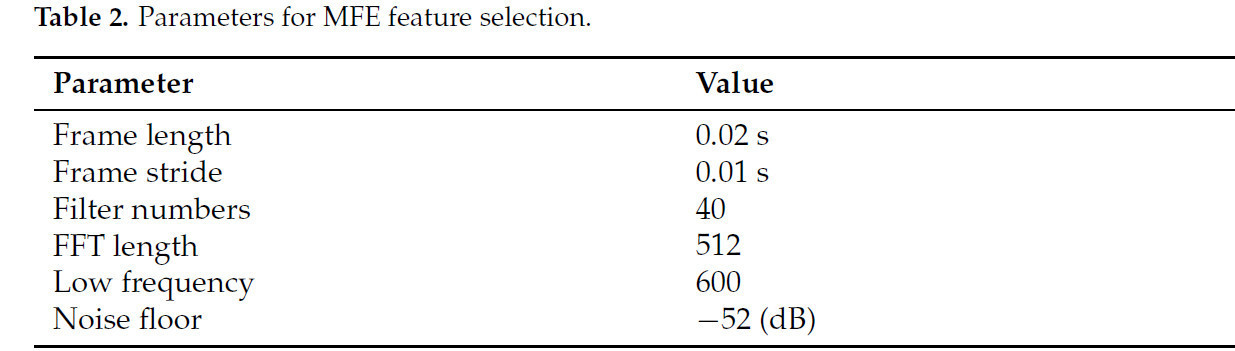
Таблица 2. Параметры для выбора признаков MFE.
Аудиоданные были предварительно обработаны с MFE в качестве экстрактора признаков, в результате чего было получено 5960 признаков для каждого образца. Входные признаки затем были преобразованы в 2-мерный тензор формы (149 × 40) для подготовки данных к процессам свертки. Преобразованные признаки затем подавались на слои модели. Каждый сверточный слой использовал функцию активации ReLU, чтобы позволить модели хорошо изучить закономерности в данных для лучшей классификации [42,43]. Max pooling после каждого сверточного слоя понижал дискретизацию карт признаков для снижения вычислительной нагрузки при сохранении наиболее важных признаков. Слой Flatten затем подготавливал обработанные данные для последующего этапа классификации. Наконец, полносвязный слой с функцией активации softmax использовался для классификации. Архитектура Conv1D выражается математически в Уравнении (3), а параметры обучения показаны в Таблице 3. Рисунок 4 показывает схематическую иллюстрацию архитектуры модели:


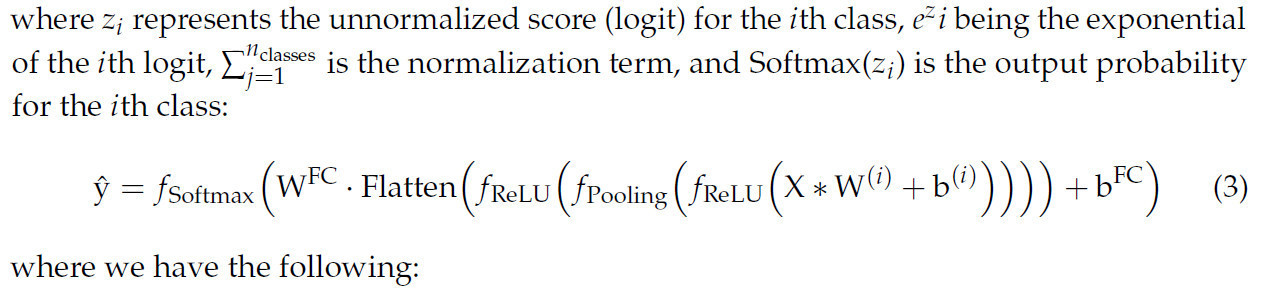

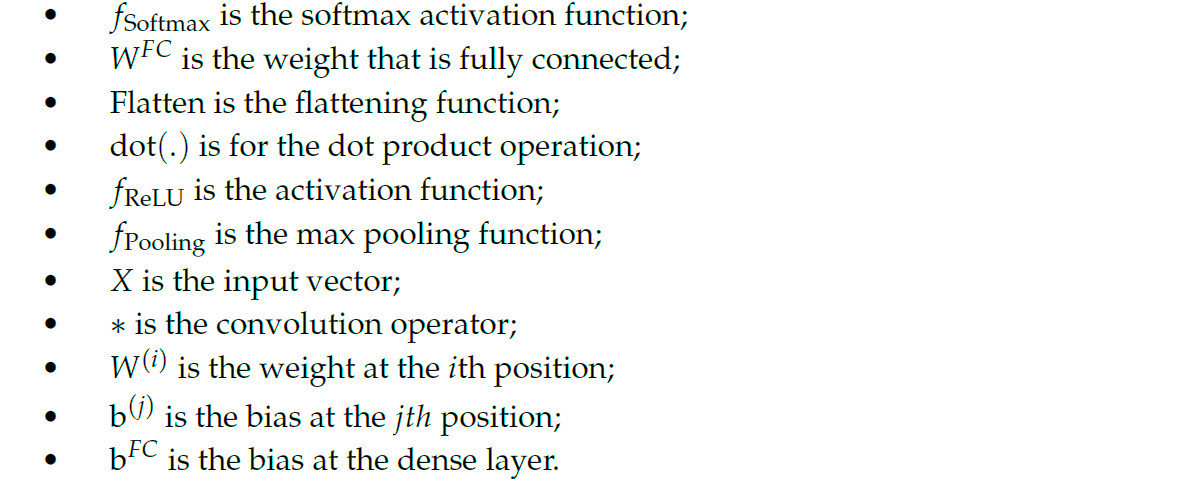
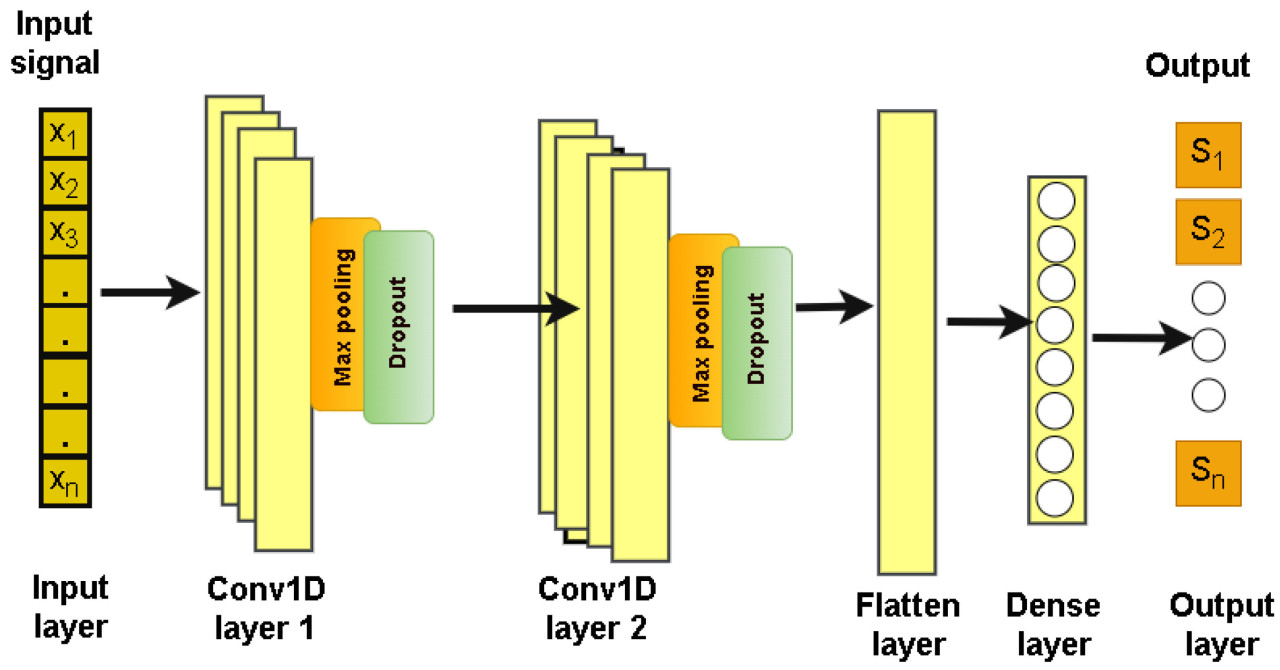
Рисунок 4. Архитектура сети Conv1D.
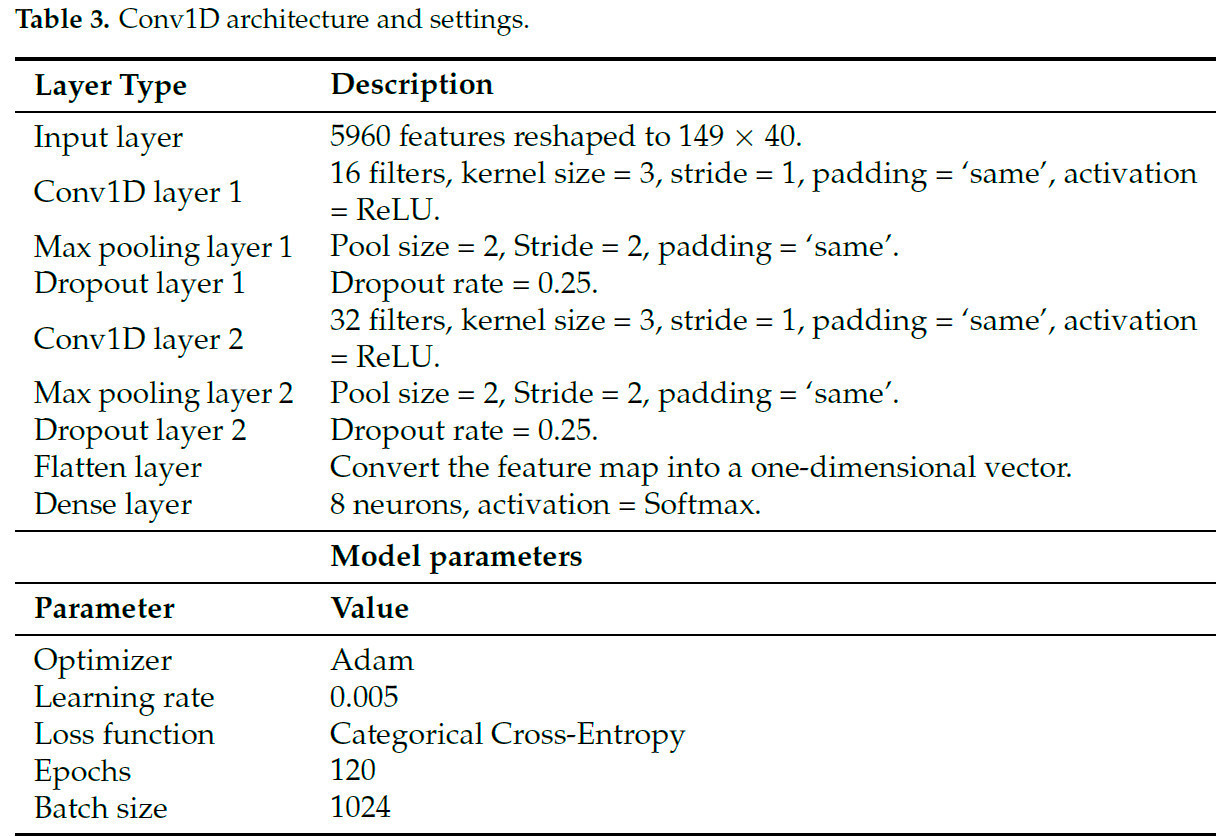
Таблица 3. Архитектура и настройки Conv1D.
2.3.2. Развертывание модели и сетевое оборудование
Окончательная модель была оптимизирована с помощью квантования, преобразована в модель TensorFlow Lite размером 19 Кб, достаточно маленькую, чтобы быть развернутой на любом оборудовании с ограниченной памятью для работы на границе. Модель tinyML была развернута на модуле BLE Sense, микроконтроллере, который поддерживает tinyML. BLE Sense использует интегрированный всенаправленный цифровой микрофон для сбора аудиоданных с частотой дискретизации 16 кГц, в то время как возможность tinyML позволяет проводить анализ звуковых сигнатур в реальном времени. Как система IoT с граничной обработкой, наша простая прототипная сеть состоит из трех взаимосвязанных узлов: базовая станция (A) и два других узла (B и C). Базовая станция оснащена релейным модулем, который активирует динамик, и служит целью центрального управления прототипом отпугивания птиц-вредителей. Используя протокол GSM-вызовов, узлы B и C связываются с базовой станцией. Обнаружения, происходящие на узлах, передаются на базовую станцию как GSM-вызов, в то время как сама базовая станция также может производить обнаружения. Базовая станция интерпретирует прием GSM-вызова с известного мобильного номера узла как триггер для отпугивания птиц, затем сбрасывает вызов без передачи каких-либо данных. Когда BLE Sense на базовой станции обнаруживает птичьи голоса, он создает триггер, открывая реле для воспроизведения отпугивающего звука; таким образом, и узлы, и базовые станции создают триггеры. Триггеры инициируют воспроизведение звука через динамик. При достаточном количестве обнаружений любой из узлов или базовая станция также отправляет SMS фермеру, чтобы предупредить его о присутствии значительного количества птиц-вредителей.
Известно, что птицы привыкают к повторяющимся отпугивающим действиям. Прототип был разработан для приведения в действие различных звуков случайным образом при каждом новом обнаружении события, чтобы уменьшить привыкание птиц. Мы использовали многоклассовую классификацию, потому что хотим лучше понять распространенность птиц-вредителей с течением времени, что дает нам представление о поведении птиц-вредителей и позволяет в будущем адаптироваться к изменяющимся условиям. Звуки, выбранные для отпугивания птиц, включают выстрелы на разных амплитудах, лай собак, ультразвуковые звуки, сирены, традиционные шумовые устройства, автомобильные гудки, вувузелы и многие другие, причем некоторые звуки были предложены фермерами. Перепрограммирование с другими звуками легко выполняется.
Возможность службы коротких сообщений (SMS) прототипа основана на мини-модуле GSM/GPRS SIM800L. Поскольку отправка SMS фермеру при каждом обнаружении была бы чрезмерной, SMS отправляется только после 20 обнаружений. Также GSM-модуль (SIM800L) является самым энергопотребляющим компонентом во время активной передачи, что необходимо контролировать для оптимизации энергоэффективности. Следовательно, когда фермер получает SMS, он знает, что присутствие птиц-вредителей значительно. Система также содержит модуль GPS Adafruit Ultimate для предоставления важной пространственно-временной информации для событий обнаружения. По соображениям безопасности контейнер прототипа имеет концевой выключатель, который активирует зуммер для подачи звукового сигнала тревоги всякий раз, когда коробка контейнера открывается. Затем на телефон фермера отправляется SMS с информацией о времени и месте от GPS, давая фермеру информацию для сообщения о краже или вандализме.
Система питается от двух перезаряжаемых литий-ионных аккумуляторов 18 650 3.7 В, управляемых системой управления батареями (BMS), и заряжается через 5 Вт 6 В солнечную панель. BMS контролирует и регулирует контроль заряда, чтобы предотвратить перезаряд и чрезмерную разрядку. Мы использовали Li-ion аккумуляторы из-за повышенной плотности энергии, необходимой для поддержки компонентов для отзывчивого прототипа отпугивания птиц, способного к продолжительной работе на ферме. Солнечная панель 5 Вт 6 В обеспечивает зарядку аккумулятора whenever necessary для поддержания питания системы в обозначенные временные рамки. Прототип запрограммирован включаться примерно на восходе солнца, когда птицы становятся активными, и выключаться на закате, когда птицы устраиваются на ночлег. Рисунок 5 показывает настройку прототипа, расположенную на печатной плате (PCB), и сценарий полевого развертывания для тестирования в Руанде в январе 2024 года. Блок-схема архитектуры системы-прототипа показана на Рисунке 6. Таблица 4 предоставляет список компонентов, использованных для построения прототипа.
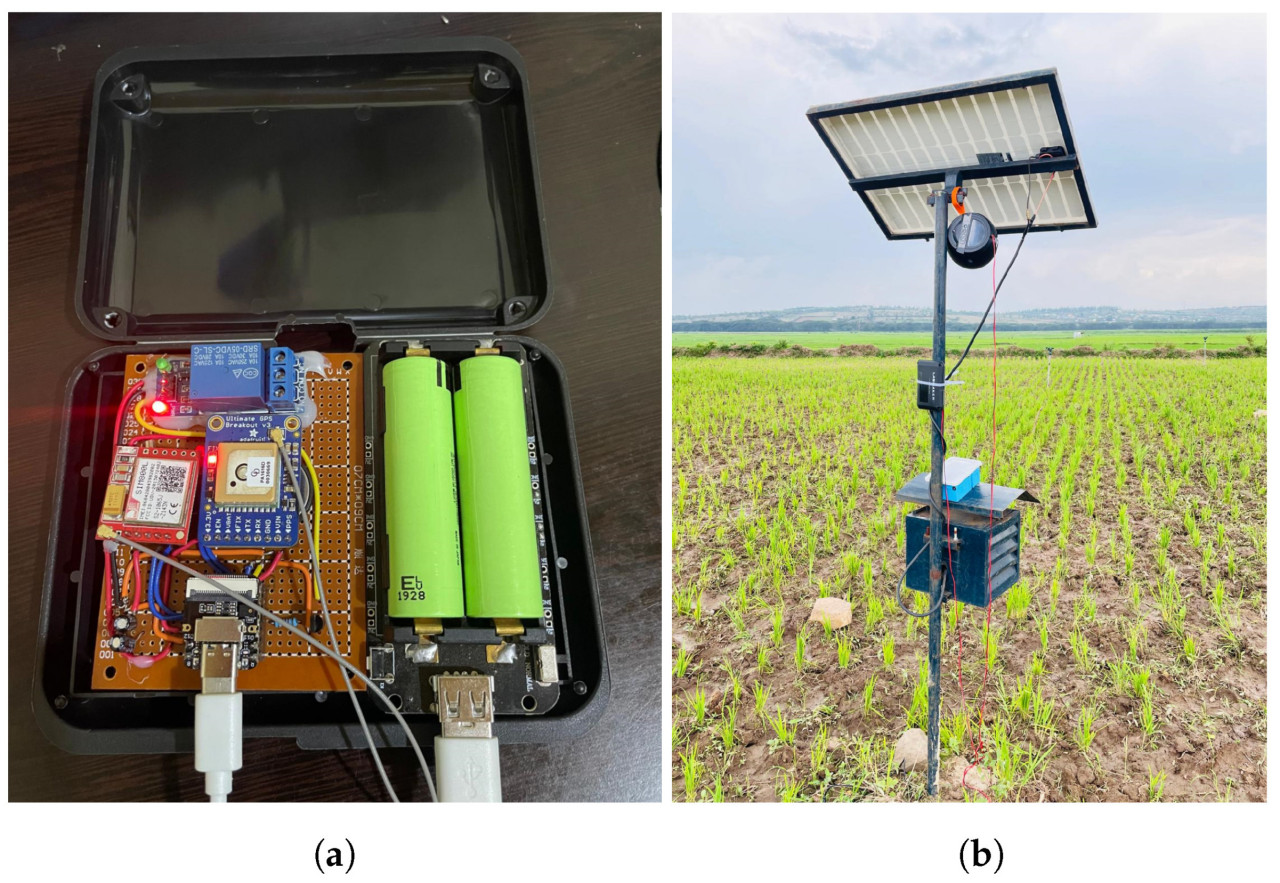
Рисунок 5. (a) Настройка прототипа на плате PCB без динамика. (b) Развертывание в поле с солнечной энергией для подзарядки аккумулятора.
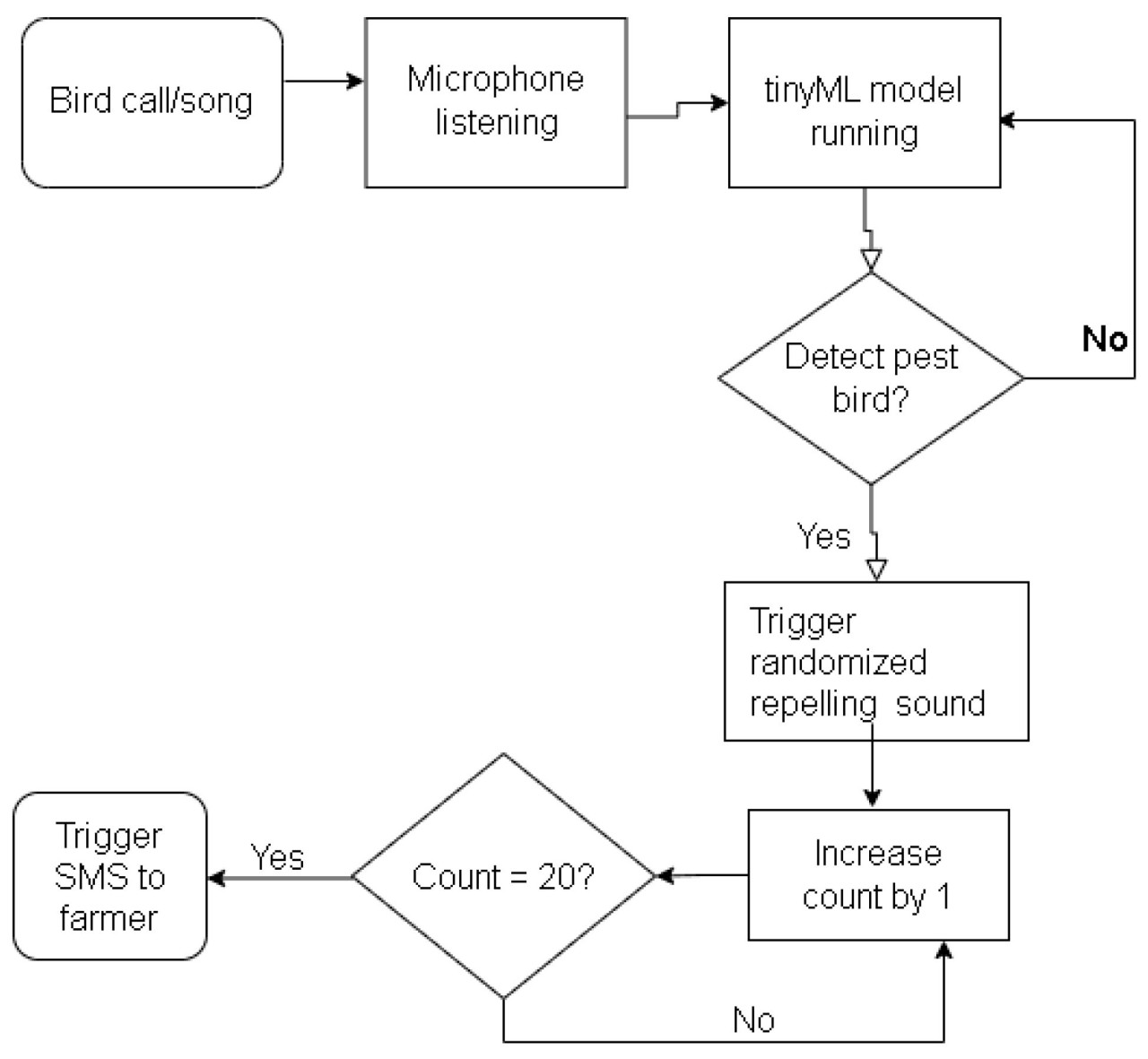
Рисунок 6. Блок-схема системы-прототипа.
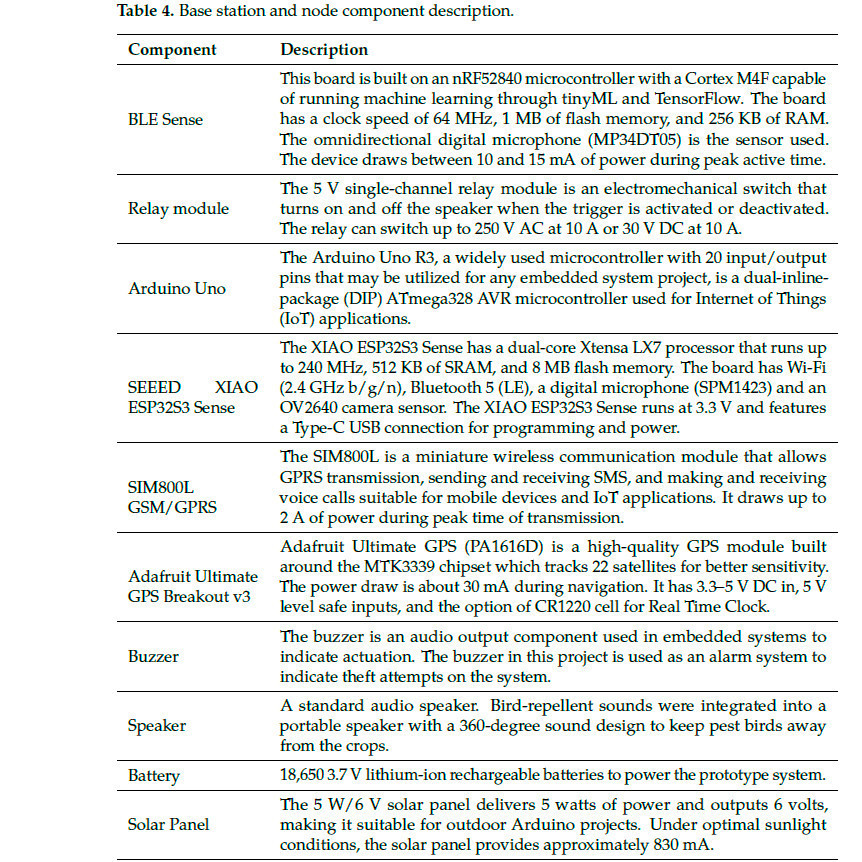
Таблица 4. Описание компонентов базовой станции и узла.
Базовая станция имеет больше компонентов, чем узлы, и поэтому энергопотребление больше. Общее энергопотребление для оригинальной конструкции базовой станции с использованием Arduino Nano 33 BLE Sense, Arduino Uno, SIM800L, GPS, модуля Micro SD, концевого выключателя, зуммера и одноканального реле составляет 9755.8 мВт, при условии, что GSM находится на пиковой мощности. Исключая GSM, общее энергопотребление становится 955.8 мВт. Чтобы снизить энергопотребление, мы перепроектировали базовую станцию, используя XIAO ESP32S3 Sense. XIAO — это крошечная плата разработки, которая интегрирует датчик камеры, цифровой микрофон и поддержку SD-карты для систем ИИ. Эта плата сочетает в себе встроенную вычислительную мощность ML для интеллектуальных голосовых и визуальных AI-проектов. Следовательно, XIAO заменяет BLE Sense, Arduino Uno и модуль Micro SD card. XIAO поставляется с 8 МБ ОЗУ, 8 МБ флеш-памяти для хранения моделей и скоростью процессора до 240 МГц, улучшая задержку и ограничения памяти. Использование XIAO значительно улучшило энергопотребление. Исключая GSM, общее энергопотребление составило 323 мВт, что составляет 33.8% от мощности, потребляемой в оригинальной конструкции базовой станции.
3. Результаты
Экспериментальные результаты нашего теста моделей обнаружения показали, что комбинация техники выбора признаков MFE и архитектуры Conv1D показала хорошие результаты, достигнув F1 score 0.99 и точности 99% по сравнению с MFCC с 0.94 и 93% соответственно. F1 score для техники выбора признаков спектрограммы был очень низким — 0.08 с точностью 0% (Таблица 5). Архитектура Conv2D также достигла аналогичного F1 score 0.99 и точности тестирования 99% для MFE и выбора признаков спектрограммы, в то время как MFCC дала 0.92 и 89% для оценок тестирования соответственно (Таблица 6). Метрики производительности на устройстве показали, что Conv1D работает лучше, чем Conv2D, во всех техниках выбора признаков. В то время как для Conv1D потребовалось менее 40 мс с 22.1 КБ пиковой оперативной памяти для вывода при обнаружении событий, для Conv2D потребовалось около 556 мс с 97.4 КБ пиковой оперативной памяти для вывода тех же событий, как иллюстрируется в Таблицах 5 и 6, соответственно. В случае с MFCC расчетная производительность на устройстве была очень быстрой, делая выводы за 2 мс при пиковой оперативной памяти 4.8 КБ и флеш-памяти 32.2 КБ, но с уменьшенной точностью, как отмечалось выше. Балансируя требования, относительная точность и достаточная скорость пары признаков MFE и модели Conv1D были выбраны для нашей системы-прототипа как хороший компромисс.
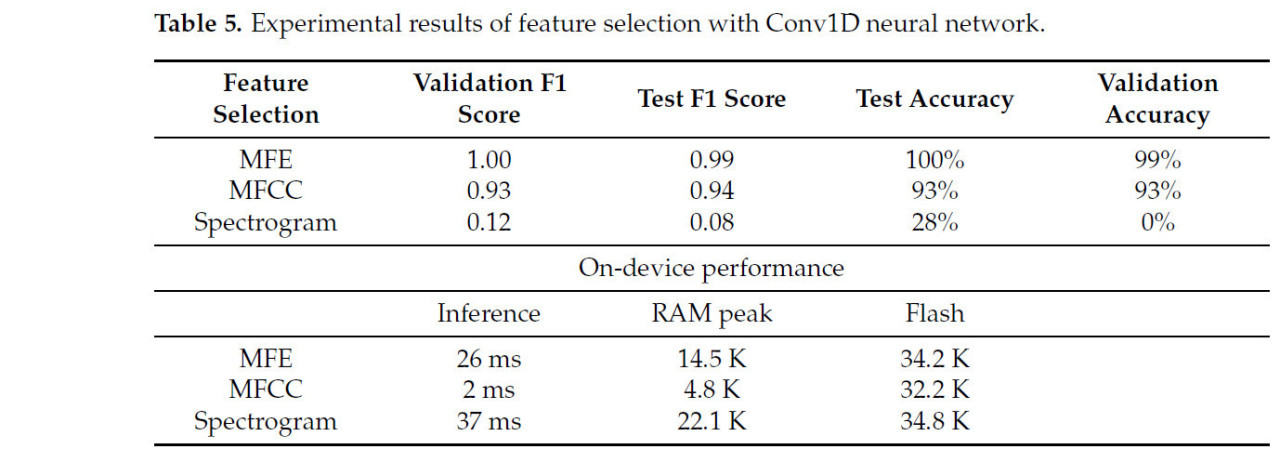
Таблица 5. Экспериментальные результаты выбора признаков с нейронной сетью Conv1D.
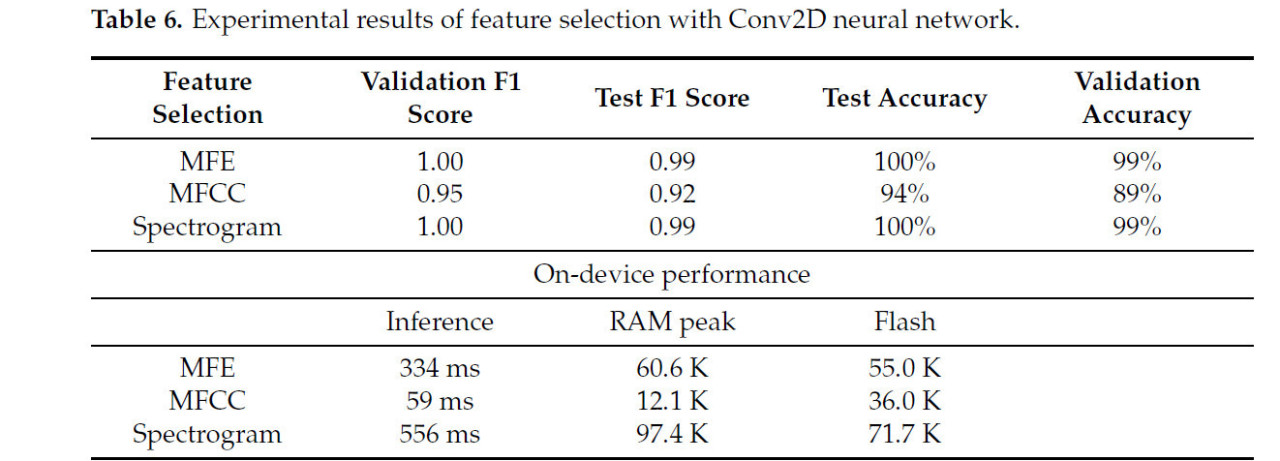
Таблица 6. Экспериментальные результаты выбора признаков с нейронной сетью Conv2D.
Мы использовали весь набор данных для обучения нейронной сети Conv1D с техникой выбора признаков MFE для нашей основной модели с использованием Edge Impulse для обнаружения птиц-вредителей. После нескольких проб и настройки параметров во время обучения сети модель достигла средней точности валидации 96.1% после четырех итераций разделения 80/20. Средняя точность окончательной модели на тестовых данных составила 92.99%. Таблица 7 показывает результаты экспериментов с различными гиперпараметрами. Результаты стабильно показывают, что когда скорость обучения составляет 0.005 с 120 эпохами, наблюдается значительное улучшение производительности модели. Хотя все другие параметры хорошо себя проявили, окончательная модель для нашей работы использовала 16 и 32 фильтра в слое 1 и слое 2 соответственно, при скорости обучения 0.005 с 120 эпохами, достигнув 96.1% на обучающих данных и 92.99% на тестовых данных.
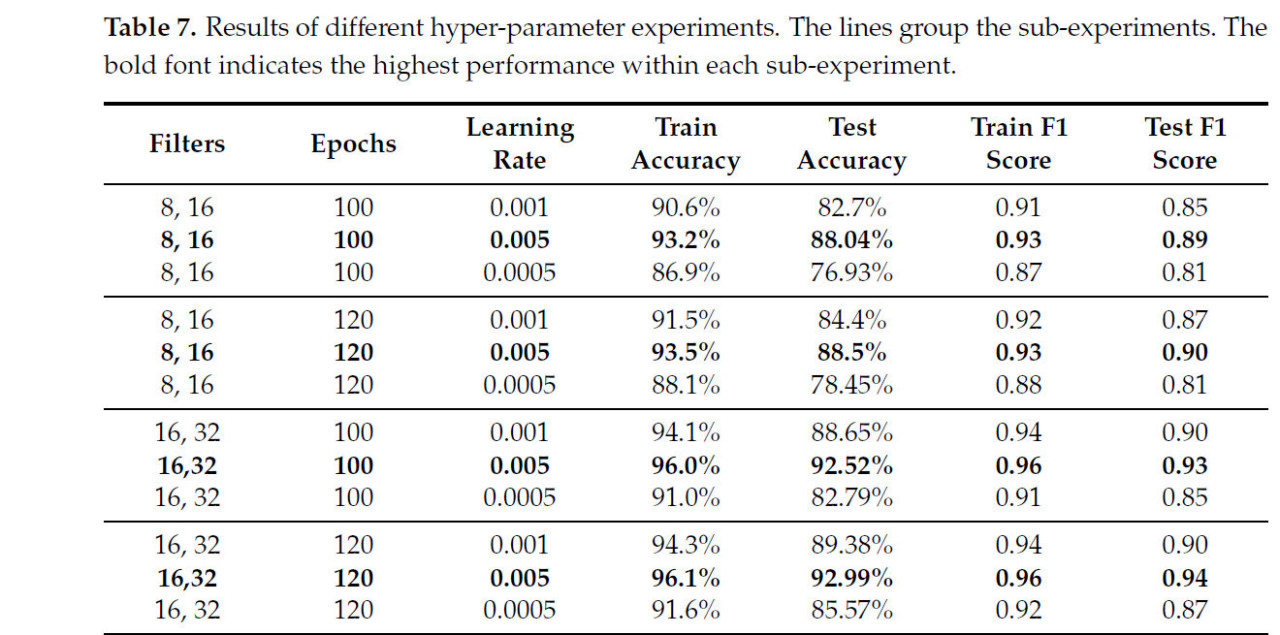
Таблица 7. Результаты различных экспериментов с гиперпараметрами.
Матрица ошибок и кривая рабочих характеристик приемника (ROC) – Площадь под кривой (AUC) использовались для оценки производительности модели. Матрица ошибок — это стандартная метрика, которая подчеркивает четкий обзор истинно и ложно положительных результатов, что предоставляет точный анализ того, насколько хорошо модель сработала. Матрица ошибок, следовательно, предоставляет информацию о производительности модели, специфичной для класса. Рисунок 7 показывает матрицу ошибок для тестовых результатов модели нейронной сети Conv1D.
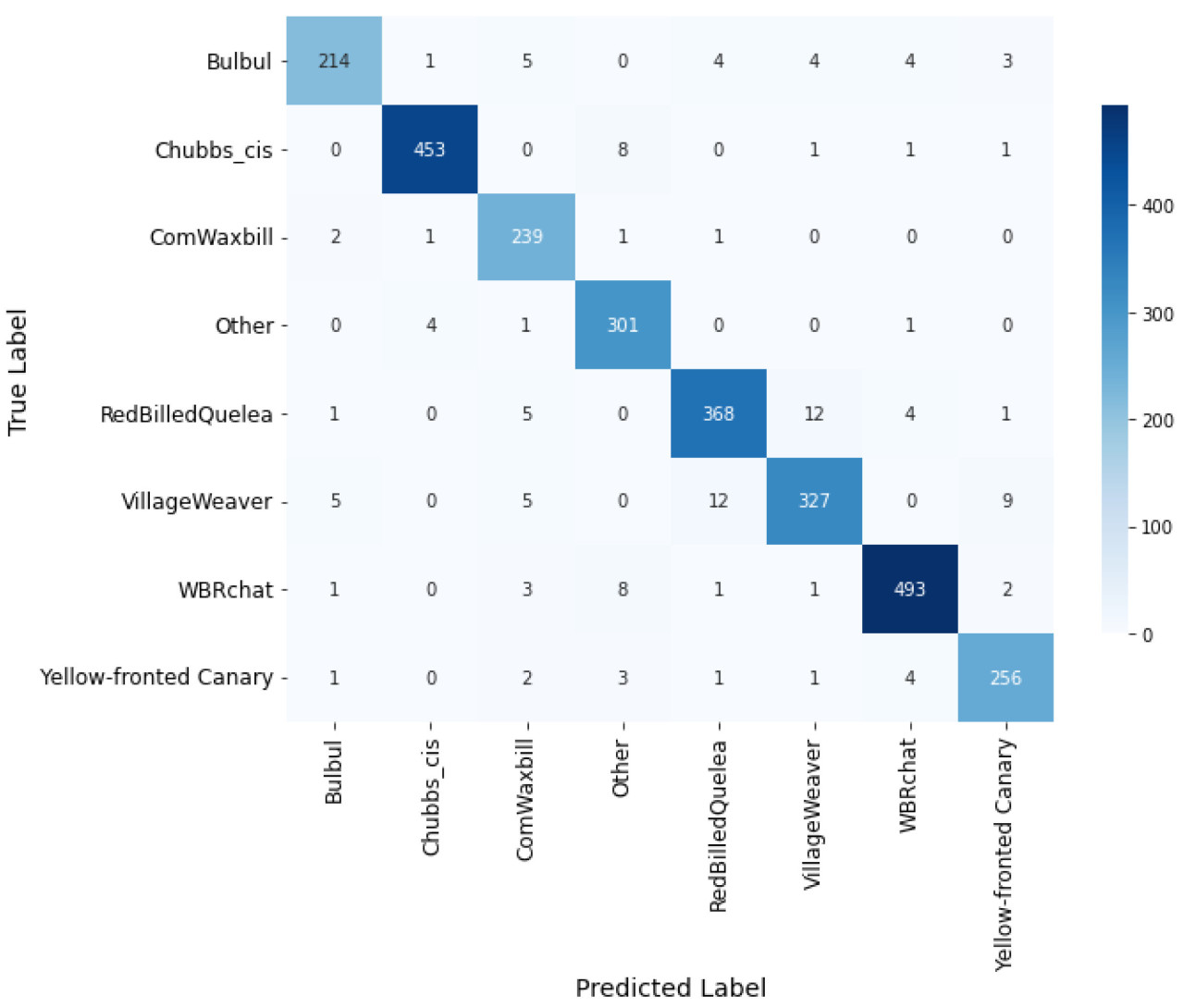
Рисунок 7. Матрица ошибок, описывающая производительность признака MFE с лучшей моделью Conv1D.
Кривая ROC использовалась для оценки общей производительности дискриминационной способности модели в классификации различных видов интереса от фонового шума. Кривая ROC (Рисунок 8) иллюстрирует баланс между истинно и ложно положительными частотами при разных порогах обнаружения. Оценка AUC 0.99 была вычислена для измерения общей производительности модели независимо от какого-либо конкретного порога, указывая на способность модели различать виды птиц.
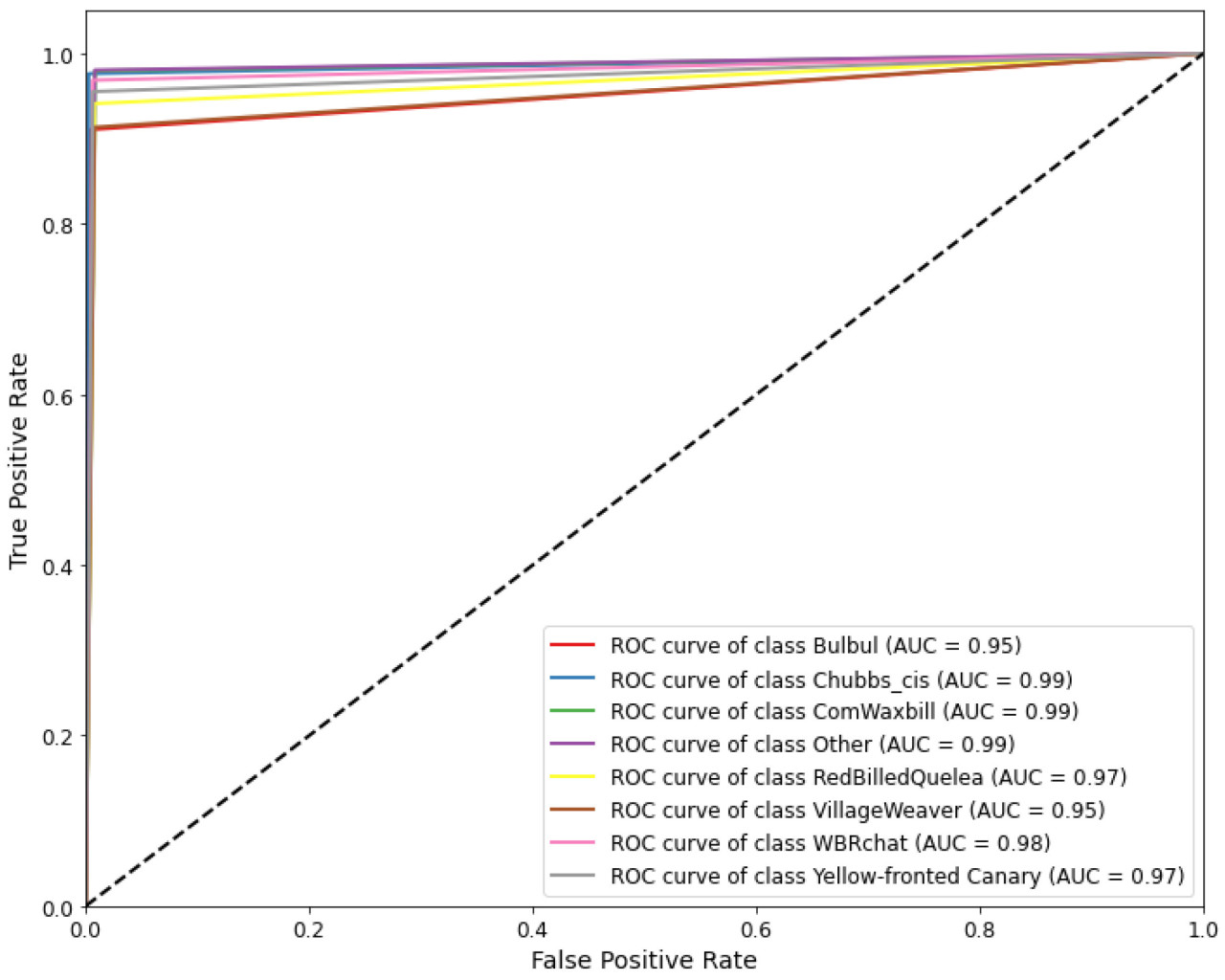
Рисунок 8. Кривая ROC для признака MFE с лучшей моделью Conv1D.
Первоначальное тестирование прототипа было выполнено с использованием воспроизведения записей птиц из поля. Порог точности обнаружения был установлен на 70%, в этот момент активировался триггер отпугивающих звуков. Таким образом, все обнаружения ниже 70% порога не вызывали триггер для отпугивающего действия. Окончательная модель использовала 14.8 КБ пиковой оперативной памяти и занимала 43.8 КБ флеш-памяти. Рисунок 9 иллюстрирует отображение обнаружения птицы из прототипа, как показано на последовательном мониторе Arduino IDE. Модель на устройстве обнаружила обыкновенного бюльбюля с точностью 98%.
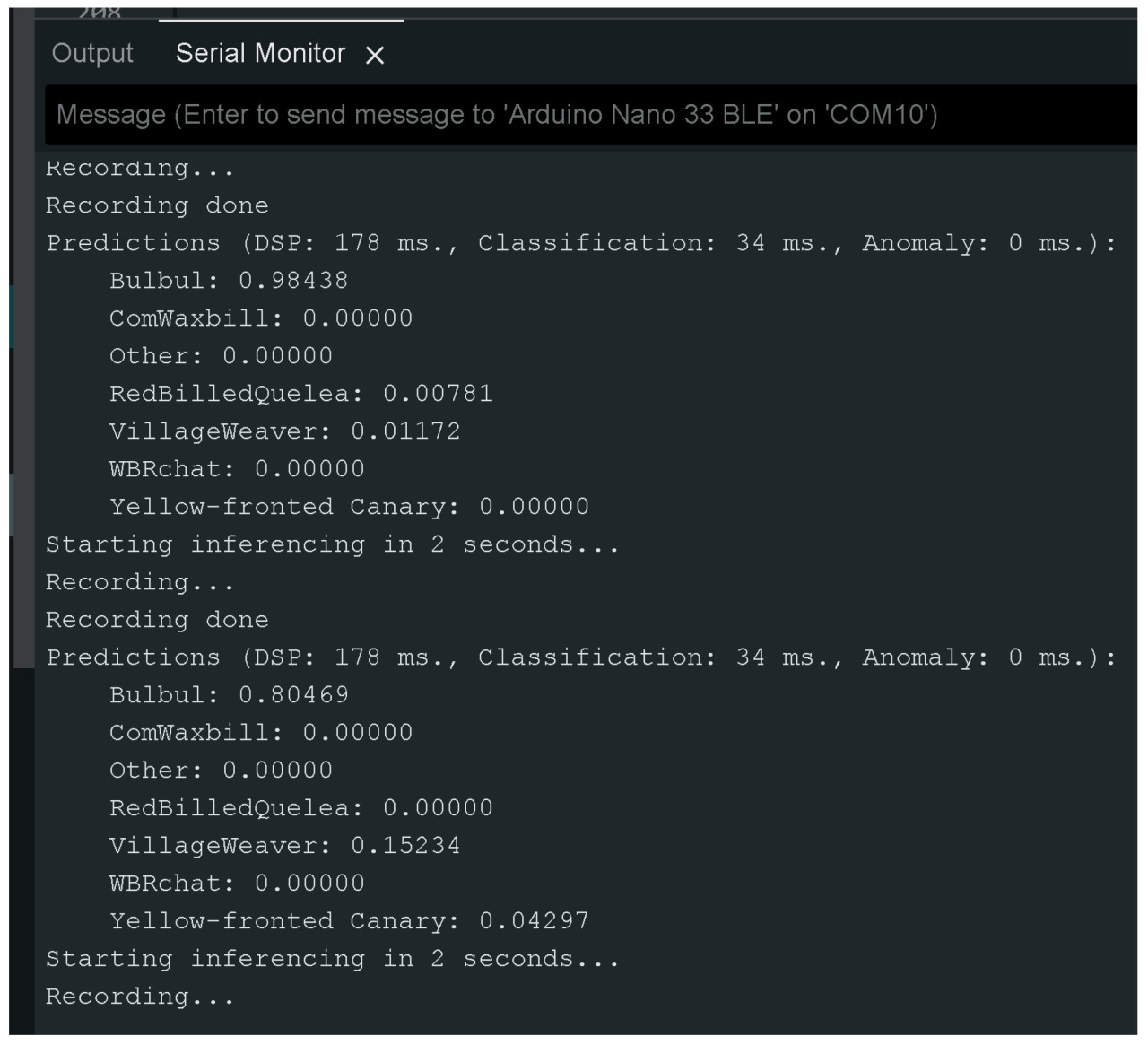
Рисунок 9. Результат на устройстве, отображаемый на последовательном мониторе Arduino IDE.
Напомним, что SMS-сообщение отправляется только после 20 обнаружений. Следовательно, поступление повторяющихся SMS-сообщений указывает фермеру на высокий уровень активности птиц на ферме, информируя фермера, что может потребоваться дополнительное внимание к проблеме. Система-прототип также предупреждает фермера, когда защитный корпус системы открывается, указывая на вмешательство или потенциальную кражу. Образцы SMS, отправленные фермеру во время тестового развертывания в январе 2024 года, показаны на Рисунке 10. Сообщения представлены на английском и киньяруанда, местном языке Руанды, где тестировалась система.
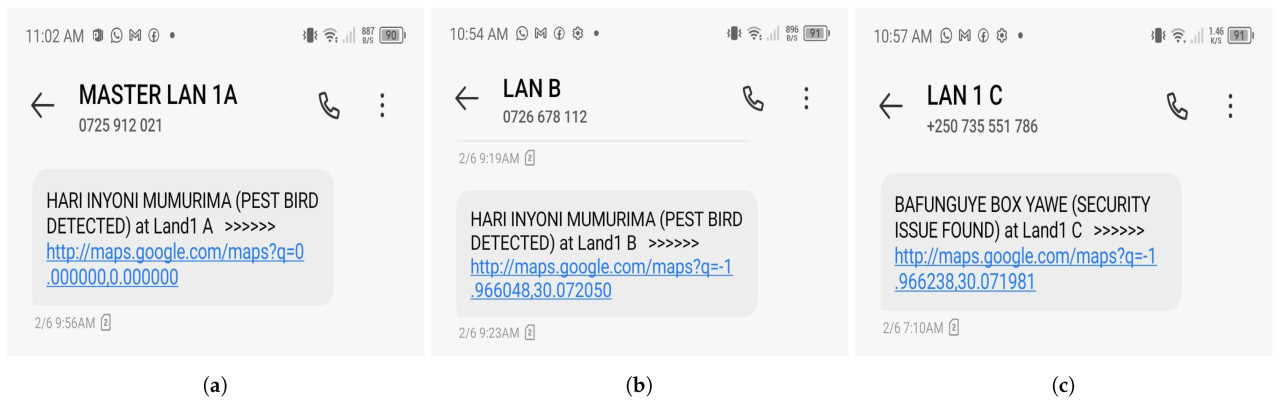
Рисунок 10. Скриншоты смартфона SMS-сообщений, доставленных с базовой станции и узлов. (a) SMS фермеру от базовой станции A, указывающее на обнаружения птиц. (b) SMS от узла B, указывающее на обнаружение птиц. (c) SMS фермеру от узла C, указывающее на угрозу безопасности.
4. Обсуждение
Фермеры в Африке используют несколько методов отпугивания птиц, чтобы отогнать виды птиц-вредителей с полей. Эти методы, включая пугала, светоотражающие ленты, химикаты и рабочих, редко бывают очень успешными. Акустические техники, такие как газовые пушки, выстрелы из ружей, AV-сигнализация, звуки хищников, ультразвуковые звуки, факелы и пиротехника, использовались в разных частях мира [21,23,24], но проблема все еще существует из-за способности птиц к обучению [31]. Использование технологий БПЛА относительно дорого и может быть непрактичным в Африке к югу от Сахары из-за государственных ограничений. Требуются новые технологии для дальнейшего сокращения ущерба посевам [23,44,45]. Проектирование и разработка системы-прототипа, работающей на границе, которая может прослушивать птичьи голоса, обрабатывать их, обнаруживать виды птиц-вредителей и запускать звуки, способные отпугнуть их, могут быть новой и жизнеспособной альтернативой борьбе с вредителями. Жизнеспособность этого подхода подтверждается применением платформы tinyML, предоставляемой Edge Impulse, для проектирования, разработки и обучения алгоритмов, развертываемых на маломощном оборудовании с меньшей памятью для управления на границе сети. Обнаружение присутствия птиц-вредителей с использованием звука является важным приложением, позволяющим своевременно предпринимать действия, которые могут помочь предотвратить повреждение посевов этими птицами [4,23].
Дальнейшее развитие нашего прототипа до операционной системы имеет потенциал помочь фермерам преодолеть проблему контроля и управления птицами-вредителями на сельскохозяйственных полях для улучшения урожаев. Дополнительно, технология акустического мониторинга для отпугивания птиц-вредителей в Африке может помочь сократить использование детей на фермах для отпугивания птиц, тем самым обеспечивая, чтобы эти дети школьного возраста проводили больше времени в школе без стресса полевых работ [22]. Также, использование акустической системы обнаружения вредителей является устойчивой системой контроля, конкретно сокращая использование вредных химикатов на посевах для отпугивания птиц, что в конечном итоге может повлиять и на потребителя.
Экспериментальные результаты в Таблицах 5 и 6 на подмножестве данных помогли нам выбрать технику извлечения признаков MFE и нейронную сеть Conv1D для обучения нашей модели. Решение было основано на компромиссе между F1 score двух сверточных нейронных сетей и расчетной производительностью на устройстве. Выбор сети Conv1D для обнаружения птиц-вредителей обусловлен ее способностью многократно и прогрессивно изучать дискриминационные признаки из птичьих голосов. Дополнительно, Conv1D поддерживает реализацию в реальном времени и недорогое оборудование благодаря простой и компактной настройке архитектур, которые выполняют только одномерные свертки [46]. Кроме того, сети Conv1D хорошо справляются с обработкой временных данных, что делает их идеальными для анализа птичьих голосов. После обучения сеть Conv1D может обрабатывать новые целевые вокализации с достаточной скоростью, чтобы сделать ее пригодной для приложений мониторинга птиц-вредителей в реальном времени. Хотя техника выбора признаков MFCC привела к очень быстрому расчетному времени на устройстве (Таблица 5), мы в конечном итоге выбрали технику выбора признаков MFE за ее превосходную точность [38,40,47].
Окончательное тестирование модели и анализ производительности свидетельствуют о том, что выбранная модель хорошо обобщает и достаточно быстра, чтобы быть развернутой на границе. Модель достигла точности 96.1% во время обучения с F1 score 0.96. На этапе тестирования точность модели составила 92.99%, а F1 score — 0.94, что указывает на хорошую дискриминационную способность изученных признаков. Графики ROC дополнительно иллюстрируют дискриминационные способности модели хорошо обобщать для обнаружения птиц-вредителей, достигнув оценки AUC 0.99. Существует некоторая степень путаницы между обнаружением красноклювого квелеа и деревенского ткача, как иллюстрируется на Рисунке 7. Обе птицы принадлежат к семейству ткачиковых; следовательно, вокализации схожи с короткими и повторяющимися calls, особенно во время кормления [48]. Это объясняет, почему модель иногда путает эти два вида. Учитывая, что обнаружение птиц-вредителей в реальной среде со всем фоновым шумом является сложной задачей, мы считаем, что наши результаты демонстрируют, что система-прототип может быть полезной для мониторинга птиц-вредителей в режиме, близком к реальному времени, на границе.
С BLE Sense для узлов и XIAO для базовой станции мы успешно эксплуатировали оборудование в поле, обнаруживая виды птиц-вредителей, что приводило к срабатыванию звуков для отпугивания птиц. Эта система-прототип сокращает количество контактов птиц-вредителей с посевами, минимизируя ущерб и, таким образом, повышая урожайность. Модель рассматривает полезных и не-вредительских птиц, а также все другие окружающие звуки, как фон, ограничивая активацию отпугивающих звуков, тем самым уменьшая привыкание птиц. Снижение привыкания птиц является необходимым результатом успешной системы отпугивания [21,31,32].
SMS-сигнализация как часть нашей системы соответствует потребностям фермеров в этих странах с низким уровнем дохода, где кнопочные телефоны все еще распространены. SMS — это простое решение, которое служит «ухом» фермера, предоставляя легко понятную информацию о присутствии птиц-вредителей и помогая им принимать основанные на данных решения для управления фермой. Система также решает проблемы краж на фермах через SMS, отправляемое фермеру, когда предпринимаются попытки открыть защитную коробку системы. Мы можем эффективно питать нашу систему с помощью небольшой солнечной панели и перезаряжаемых аккумуляторов [49,50]. Наша система солнечной панели 5 Вт/6 В, заряжающая литий-ионный аккумулятор 18650 3.7 В, управляется системой управления батареями (BMS). Поскольку нам нужно работать с системой только в дневное время, когда птицы активны, аккумулятор постоянно перезаряжается во время работы системы.
Разработка нашей модели опирается на акустическую библиотеку. Местные фермеры могли идентифицировать птиц-вредителей. Однако у нас иногда возникали проблемы с идентификацией точного вида и затем созданием адекватного акустического набора данных из наших записей или библиотек xeno-canto или Macaulay. Используя конфигурацию базовой станции и узла, мы создали прототип акустической сети, которую можно расширить для облегчения комплексного анализа моделей активности птиц-вредителей, предлагая идеи, которые могут информировать как немедленные стратегии отпугивания, так и длительный контроль управления вредителями.
5. Выводы
В этой статье мы демонстрируем создание акустической сети датчиков, работающей с моделью tinyML для обнаружения птиц-вредителей на сельскохозяйственных полях. Raven Pro был использован для анализа и извлечения calls конкретных видов для маркировки. Мы обучили и протестировали модель tinyML на Edge Impulse и развернули модель на оборудовании BLE Sense и XIAO. Система действует при обнаружении птиц-вредителей и воспроизводит звук, чтобы отпугнуть их. При достаточном количестве обнаружений используется SMS-сообщение, чтобы информировать фермера о присутствии птиц-вредителей для помощи в принятии решений. Система-протип может дополнять другие методы отпугивания для улучшения контроля над птицами-вредителями на фермах устойчивым образом.
Ссылки
1. Oerke, E.C. Crop losses to pests. J. Agric. Sci. 2006, 144, 31–43. [Google Scholar] [CrossRef]
2. Sausse, C.; Baux, A.; Bertrand, M.; Bonnaud, E.; Canavelli, S.; Destrez, A.; Klug, P.E.; Olivera, L.; Rodriguez, E.; Tellechea, G.; et al. Contemporary challenges and opportunities for the management of bird damage at field crop establishment. Crop Prot. 2021, 148, 105736. [Google Scholar] [CrossRef]
3. de Mey, Y.; Demont, M. Bird Damage to Rice in Africa: Evidence and Control. Realiz. Afr. Rice Promise 2013, 241–249. [Google Scholar] [CrossRef]
4. de Mey, Y.; Demont, M.; Diagne, M. Estimating bird damage to rice in Africa: Evidence from the Senegal River Valley. J. Agric. Econ. 2012, 63, 175–200. [Google Scholar] [CrossRef]
5. Hiron, M.; Rubene, D.; Mweresa, C.K.; Ajamma, Y.U.; Owino, E.A.; Low, M. Crop damage by granivorous birds despite protection efforts by human bird scarers in a sorghum field in western Kenya. Ostrich 2014, 85, 153–159. [Google Scholar] [CrossRef]
6. Ranjith, M.; Chellappan, M.; Chaudhary, V.; Sreejeshnath, K. Bird pests: Damage and ecofriendly management: Management of depredatory birds. Ann. Arid Zone 2023, 62, 361–372. [Google Scholar]
7. Canavelli, S.B.; Branch, L.C.; Cavallero, P.; González, C.; Zaccagnini, M.E. Multi-level analysis of bird abundance and damage to crop fields. Agric. Ecosyst. Environ. 2014, 197, 128–136. [Google Scholar] [CrossRef]
8. Gebhardt, K.; Anderson, A.M.; Kirkpatrick, K.N.; Shwiff, S.A. A review and synthesis of bird and rodent damage estimates to select California crops. Crop Prot. 2011, 30, 1109–1116. [Google Scholar] [CrossRef]
9. Gonthier, D.J.; Sciligo, A.R.; Karp, D.S.; Lu, A.; Garcia, K.; Juarez, G.; Chiba, T.; Gennet, S.; Kremen, C. Bird services and disservices to strawberry farming in Californian agricultural landscapes. J. Appl. Ecol. 2019, 56, 1948–1959. [Google Scholar] [CrossRef]
10. Fan, S.; Rue, C. The role of smallholder farms in a changing world. In The Role of Smallholder Farms in Food and Nutrition Security; Springer: Cham, Switzerland, 2020; pp. 13–28. [Google Scholar]
11. Ricciardi, V.; Ramankutty, N.; Mehrabi, Z.; Jarvis, L.; Chookolingo, B. How much of the world’s food do smallholders produce? Glob. Food Secur. 2018, 17, 64–72. [Google Scholar] [CrossRef]
12. Kamara, A.; Conteh, A.; Rhodes, E.R.; Cooke, R.A. The relevance of smallholder farming to African agricultural growth and development. Afr. J. Food Agric. Nutr. Dev. 2019, 19, 14043–14065. [Google Scholar] [CrossRef]
13. Avery, M.; Tillman, E.; Laukert, C. Evaluation of chemical repellents for reducing crop damage by Dickcissels in Venezuela. Int. J. Pest Manag. 2001, 47, 311–314. [Google Scholar] [CrossRef]
14. DeLiberto, S.T.; Werner, S.J. Applications of chemical bird repellents for crop and resource protection: A review and synthesis. Wildl. Res. 2024, 51, WR23062. [Google Scholar] [CrossRef]
15. Monteagudo, N.; Benayas, J.M.R.; Andivia, E.; Rebollo, S. Avian regulation of crop and forest pests, a meta-analysis. Pest Manag. Sci. 2023, 79, 2380–2389. [Google Scholar] [CrossRef]
16. Díaz-Siefer, P.; Olmos-Moya, N.; Fontúrbel, F.E.; Lavandero, B.; Pozo, R.A.; Celis-Diez, J.L. Bird-mediated effects of pest control services on crop productivity: A global synthesis. J. Pest Sci. 2022, 95, 567–576. [Google Scholar] [CrossRef]
17. Whelan, C.J.; Şekercioğlu, Ç.H.; Wenny, D.G. Why birds matter: From economic ornithology to ecosystem services. J. Ornithol. 2015, 156, 227–238. [Google Scholar] [CrossRef]
18. Bruggers, R.L.; Rodriguez, E.; Zaccagnini, M.E. Planning for bird pest problem resolution: A case study. Int. Biodeterior. Biodegrad. 1998, 42, 173–184. [Google Scholar] [CrossRef]
19. Bruggers, R.; Jaeger, M. Bird pests and crop protection strategies for cereals of the semi-arid African tropics. In Sorghum in the Eighties; ICRISAT Center: Patencheru, India, 1982; pp. 303–312. [Google Scholar]
20. Wang, Z.; Griffin, A.S.; Lucas, A.; Wong, K. Psychological warfare in vineyard: Using drones and bird psychology to control bird damage to wine grapes. Crop Prot. 2019, 120, 163–170. [Google Scholar] [CrossRef]
21. Micaelo, E.B.; Lourenço, L.G.; Gaspar, P.D.; Caldeira, J.M.; Soares, V.N. Bird deterrent solutions for crop protection: Approaches, challenges, and opportunities. Agriculture 2023, 13, 774. [Google Scholar] [CrossRef]
22. Kamba, A.A.; Muntaka, M.; Ahmad, M.; Precious, N. Children Involvement in Rice Cultivation: Assessment of Their Role and Impact in Sokoto State, Nigeria. Int. J. Appl. Agric. Sci. 2021, 7, 89–97. [Google Scholar]
23. Dyck, J.; Warbick, J. Bird Control in Horticultural Crops; Ministry of Agriculture, Food and Rural Affairs: Guelph, ON, Canada, 2017; Factsheet No. 17-029. [Google Scholar]
24. Augustina, P.; Vanghele, N.; Cujbescu, D.; Nitu, M.; Gageanu, I. Review of effectiveness of visual and auditory bird scaring techniques in agriculture. In Proceedings of the 22nd International Scientific Conference “Engineering for Rural Development”, Jelgava, Latvia, 24–26 May 2023; pp. 275–281. [Google Scholar]
25. Grimm, B.A.; Lahneman, B.A.; Cathcart, P.B.; Elgin, R.C.; Meshnik, G.L.; Parmigiani, J.P. Autonomous unmanned aerial vehicle system for controlling pest bird population in vineyards. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, American Society of Mechanical Engineers; 2012; Volume 45202, pp. 499–505. [Google Scholar]
26. Dayoub, M.; Birech, R.J.; Haghbayan, M.H.; Angombe, S.; Sutinen, E. Co-design in bird scaring drone systems: Potentials and challenges in agriculture. In Proceedings of the International Conference on Advanced Intelligent Systems and Informatics 2020; Springer: Cham, Switzerland, 2021; pp. 598–607. [Google Scholar]
27. Bhusal, S.; Karkee, M.; Bhattarai, U.; Majeed, Y.; Zhang, Q. Automated execution of a pest bird deterrence system using a programmable unmanned aerial vehicle (UAV). Comput. Electron. Agric. 2022, 198, 106972. [Google Scholar] [CrossRef]
28. Marcoň, P.; Janoušek, J.; Pokorný, J.; Novotný, J.; Hutová, E.V.; Širůčková, A.; Čáp, M.; Lázničková, J. A System Using Artificial Intelligence to Detect and Scare Bird Flocks in the Protection of Ripening Fruit. Sensors 2021, 21, 4244. [Google Scholar] [CrossRef] [PubMed]
29. Salmon, T.P.; Conte, F.S. Control of Bird Damage at Aquaculture Facilities; US Department of the Interior, Fish and Wildlife Service: Washinton, DC, USA, 1981; Volume 475. [Google Scholar]
30. Short, J.J.; Kelley, M.; McKeeman, J. Recent research into reducing birdstrike hazards. Int. Bird Strike Comm. Proc. Pap. 1996, 23, 381–407. [Google Scholar]
31. Ahmad, S.; Saleem, Z.; Jabeen, F.; Hussain, B.; Sultana, T.; Sultana, S.; Al-Ghanim, K.; Al-Mulhim, N.; Mahboob, S. Potential of natural repellents methylanthranilate and anthraquinone applied on maize seeds and seedlings against house sparrow (Passer domesticus) in captivity. Braz. J. Biol. 2018, 78, 667–672. [Google Scholar] [CrossRef] [PubMed]
32. Enos, J.K.; Ward, M.P.; Hauber, M.E. A review of the scientific evidence on the impact of biologically salient frightening devices to protect crops from avian pests. Crop Prot. 2021, 148, 105734. [Google Scholar] [CrossRef]
33. Mikula, P.; Valcu, M.; Brumm, H.; Bulla, M.; Forstmeier, W.; Petrusková, T.; Kempenaers, B.; Albrecht, T. A global analysis of song frequency in passerines provides no support for the acoustic adaptation hypothesis but suggests a role for sexual selection. Ecol. Lett. 2021, 24, 477–486. [Google Scholar] [CrossRef]
34. Lisa Yang Center for Conservation Bioacoustics at the Cornell Lab of Ornithology. Raven Pro: Interactive Sound Analysis Software; Computer Software; The Cornell Lab of Ornithology: Ithaca, NY, USA, 2023; Available online: https://www.ravensoundsoftware.com/ (accessed on 20 August 2023).
35. Janapa Reddi, V.; Elium, A.; Hymel, S.; Tischler, D.; Situnayake, D.; Ward, C.; Moreau, L.; Plunkett, J.; Kelcey, M.; Baaijens, M.; et al. Edge impulse: An mlops platform for tiny machine learning. Proc. Mach. Learn. Syst. 2023, 5, 254–268. [Google Scholar]
36. Pinaso, G.R.; Figueiredo, L.M.; Júnior, O.R.; da Silva Richetto, M.R. Edge Impulse Potential to Enhance Object Recognition Through Machine Learning. Semin. Ciências Exatas E Tecnológicas 2024, 45, e49197. [Google Scholar] [CrossRef]
37. Carvalho, S.; Gomes, E.F. Automatic classification of bird sounds: Using MFCC and mel spectrogram features with deep learning. Vietnam J. Comput. Sci. 2023, 10, 39–54. [Google Scholar] [CrossRef]
38. Wielgat, R.; Zieliński, T.P.; Potempa, T.; Lisowska-Lis, A.; Król, D. HFCC based recognition of bird species. In Proceedings of the Signal Processing Algorithms, Architectures, Arrangements, and Applications SPA 2007, Poznan, Poland, 7 September 2007; pp. 129–134. [Google Scholar]
39. Turab, M.; Kumar, T.; Bendechache, M.; Saber, T. Investigating multi-feature selection and ensembling for audio classification. arXiv 2022, arXiv:2206.07511. [Google Scholar] [CrossRef]
40. Tak, R.N.; Agrawal, D.M.; Patil, H.A. Novel phase encoded mel filterbank energies for environmental sound classification. In Proceedings of the International Conference on Pattern Recognition and Machine Intelligence; Springer: Cham, Switzerland, 2017; pp. 317–325. [Google Scholar]
41. Akgun, D. Working Principles of Convolutional Neural Networks in Keras. In Academic Research and Reviews in Engineering Sciences; Platanus Publishing: Ankara, Türkiye, 2023; Chapter 37; pp. 659–674. [Google Scholar]
42. Zeiler, M.D.; Ranzato, M.; Monga, R.; Mao, M.; Yang, K.; Le, Q.V.; Nguyen, P.; Senior, A.; Vanhoucke, V.; Dean, J.; et al. On rectified linear units for speech processing. In Proceedings of the 2013 IEEE International Conference on Acoustics, Speech and Signal Processing, Vancouver, BC, Canada, 26–31 May 2013; pp. 3517–3521. [Google Scholar]
43. Hara, K.; Saito, D.; Shouno, H. Analysis of function of rectified linear unit used in deep learning. In Proceedings of the 2015 International Joint Conference on Neural Networks (IJCNN), Killarney, Ireland, 12–17 July 2015; pp. 1–8. [Google Scholar]
44. Tracey, J.; Bomford, M.; Hart, Q.; Saunders, G.; Sinclair, R. Managing Bird Damage to Fruit and Other Horticultural Crops; Bureau of Rural Sciences: Canberra, Australia, 2007. [Google Scholar]
45. Rivadeneira, P.; Kross, S.; Navarro-Gonzalez, N.; Jay-Russell, M. A review of bird deterrents used in agriculture. In Proceedings of the Vertebrate Pest Conference, Rohnert Park, CA, USA, 26 February–1 March 2018; Volume 28, p. 28. [Google Scholar]
46. Kiranyaz, S.; Avci, O.; Abdeljaber, O.; Ince, T.; Gabbouj, M.; Inman, D.J. 1D convolutional neural networks and applications: A survey. Mech. Syst. Signal Process. 2021, 151, 107398. [Google Scholar] [CrossRef]
47. Song, S.; Song, Y.; Madhu, N. Robust Detection of Background Acoustic Scene in the Presence of Foreground Speech. Appl. Sci. 2024, 14, 609. [Google Scholar] [CrossRef]
48. Gill, F.; Donsker, D. Old World Sparrows, snow finches, weavers. World Bird List Version 2010, 8. Available online: https://www.worldbirdnames.org/new/bow/weavers/ (accessed on 24 September 2023).
49. Sahraei, N.; Watson, S.; Sofia, S.; Pennes, A.; Buonassisi, T.; Peters, I.M. Persistent and adaptive power system for solar powered sensors of Internet of Things (IoT). Energy Procedia 2017, 143, 739–741. [Google Scholar] [CrossRef]
50. Mondal, S.; Paily, R. Efficient solar power management system for self-powered IoT node. IEEE Trans. Circuits Syst. I Regul. Pap. 2017, 64, 2359–2369. [Google Scholar] [CrossRef]
Amenyedzi DK, Kazeneza M, Mwaisekwa II, Nzanywayingoma F, Nsengiyumva P, Bamurigire P, Ndashimye E, Vodacek A. System Design for a Prototype Acoustic Network to Deter Avian Pests in Agriculture Fields. Agriculture. 2025; 15(1):10. https://doi.org/10.3390/agriculture15010010
Перевод статьи «System Design for a Prototype Acoustic Network to Deter Avian Pests in Agriculture Fields» авторов Amenyedzi DK, Kazeneza M, Mwaisekwa II, Nzanywayingoma F, Nsengiyumva P, Bamurigire P, Ndashimye E, Vodacek A., оригинал доступен по ссылке. Лицензия: CC BY. Изменения: переведено на русский язык

















































































































Комментарии (0)