Разработка и испытания электрического беспилотного транспортного средства для пасленовых овощей в условиях теплицы
Несмотря на использование некоторых примитивных транспортных средств в трудоемких процессах сбора и транспортировки овощей в теплицах, исследования в области интеллектуальных беспилотных транспортных средств остаются ограниченными. В данной работе было разработано беспилотное транспортное средство для сбора урожая пасленовых культур в теплицах. Его общая конструкция и планирование маршрута были адаптированы к условиям теплицы, с использованием специально разработанных компонентов, включая электрическую гусеничную платформу, механизм разгрузки и систему управления.
Аннотация
Система SLAM на основе слияния данных лидара и инерциальной навигации обеспечивает точное позиционирование и навигацию с помощью глобального планировщика маршрута, использующего алгоритм A*, и локальной виртуальной среды, построенной посредством 3D+сканирования. Слияние данных от множества датчиков для локализации, планирования маршрута и управления обеспечивает автономную работу.
Экспериментальные исследования показали, что транспортное средство способно автоматически перемещаться, останавливаться, поворачивать и производить разгрузку вдоль заданных траекторий. Грузоподъемность и запас хода электрической платформы соответствуют проектным спецификациям, а рабочие скорости приближаются к заданным (погрешность <5%). При различных нагрузках транспортное средство точно следует целевому пути с очень малыми ошибками отслеживания. Начальные контрольные точки показали высокую точность локализации с максимальными продольным и поперечным отклонениями 9,5 см и 6,7 см соответственно, в то время как среднее значение поперечного отклонения для остальных точек составляло менее 5 см. Полученные результаты способствуют прогрессу в области технологий и оборудования для беспилотной транспортировки в тепличных хозяйствах.
1. Введение
Будучи крупным производителем овощей, Китай владеет площадью около 62 миллионов му для выращивания овощей в защищенном грунте, что составляет одну треть от общего объема производства овощей и обеспечивает ежегодный запас овощей. Однако текущий уровень механизации выращивания овощей в Китае составляет всего 49,8%, что значительно ниже, чем у зерновых культур, что серьезно ограничивает развитие индустрии выращивания овощей [ 1 , 2 ], среди которых пасленовые и листовые овощи обычно высаживаются как овощные культуры. Уровень механизации сбора листовых овощей относительно высок, и в основном достигнута полная механизация [ 3 ]. Поскольку пасленовые овощи выращиваются с использованием высоких шпалер, они вырастают сочными ветвями и листьями и имеют узкие гребни, поэтому механизированные операции были достигнуты только в некоторых аспектах, таких как обработка почвы, защита растений, а также управление водой и удобрениями. Сбор и транспортировка в основном выполняются вручную [ 4 ], что является трудоемким и неэффективным. Несмотря на небольшое количество лёгких транспортёров, для передвижения, сбора и погрузки в ящики, а также для транспортировки и разгрузки требуется ручное управление, что сопровождается множеством повторяющихся процессов и низкой степенью автоматизации. С ускорением процесса урбанизации Китай сталкивается с серьёзной проблемой старения населения в сельском хозяйстве, а проблемы «трудностей с трудоустройством и дорогой рабочей силой» становятся всё более заметными [ 5 ]. Существует острая необходимость в разработке интеллектуального беспилотного транспортного оборудования, подходящего для выращивания паслёновых овощей в Китае.
Чтобы решить проблему транспортировки пасленовых овощей в теплицах, во всем мире ведутся исследования автоматизированных транспортных средств или платформ в теплицах, а также приложений для продуктов. В зависимости от режима ходьбы их можно разделить на два типа: с гусеницами и без гусениц. В зависимости от метода управления они могут быть оснащены ручным управлением, дистанционным управлением, отслеживанием, автоматическим режимом работы и другими режимами управления [ 6 ]. Те, у которых есть гусеницы, включают механические, электромагнитные, штрихкодовые и другие типы, и могут быть разделены на два типа в зависимости от положения компоновки: подвесные рельсы и наземные рельсы [ 7 ]. Подвесные рельсы устанавливаются на верхней части теплиц с помощью рельсов, оснащенных подвесными крюками. Такие компании, как Hollandlift, Qingdao Zhengmu Farming and Animal Husbandry Technology Co., Ltd. (город Циндао, Китай) и Shanghai Fengjin Intelligent Technology Co., Ltd. (Шанхай, Китай), реализовали разработку дистанционного управления транспортировкой сельскохозяйственных материалов, сельскохозяйственного оборудования и фруктов. Между грядами прокладываются рельсы (из круглых труб или уголковой стали), а для междурядного сбора и транспортировки фруктов используются колесные транспортеры. Благодаря низкой стоимости оборудования, оно сейчас применяется в нескольких местах в провинциях Шаньдун и Хэбэй в Китае. Однако рабочая длина транспортного средства определяется диапазоном проложенной колеи, и оно не очень универсально. Что касается безрельсовых транспортных средств, существует два типа: колесные и гусеничные транспортеры или платформы [ 8 , 9 ]. Они имеют свои собственные характеристики, демонстрируя хорошую проходимость между рядами и сильную функциональную расширяемость и универсальность. Колесные транспортные средства относительно гибкие, но поворачивают по большому радиусу. В то время как гусеничные транспортные средства имеют небольшой радиус поворота, управление движением относительно сложно.
В последние годы новые технологии, такие как 5G, большие данные, искусственный интеллект, навигация Beidou и распознавание изображений, быстро прогрессируют, и они интегрируются и применяются в исследованиях и разработках сельскохозяйственной техники [ 10 , 11 ]. Передовые технологии не только повышают эффективность работы и точность сельскохозяйственной техники, но и снижают производственные затраты. В частности, в последние годы применение беспилотной технологии постепенно демонстрировалось на таких культурах, как рис, пшеница, хлопок, сады и овощи открытого грунта, что делает беспилотные фермы реальностью [ 12 , 13 ]. Однако из-за таких факторов, как стальной каркас теплицы и покрытие культур, существуют проблемы с помехами и потерей сигнала сети. Это приводит к большим ошибкам в навигации и точности позиционирования, что привело к медленному прогрессу беспилотного производства в теплицах. Чтобы улучшить интеллектуальную автономность транспортных средств, ученые провели ряд исследований. Ши Юндао и др. спроектировали шасси опрыскивателя на основе визуальной навигации, которое может гибко поворачиваться и ходить автономно [ 14 ]; Нху Туонг Ан Нгуен и др. использовали машинное зрение для автономной навигации опрыскивателя для томатов и использовали визуальный алгоритм для определения плотности листьев томатных растений, чтобы можно было применять пестициды по мере необходимости [ 15 ]; Ли и др. обнаружили, что с помощью высокоточных геомагнитных датчиков и телеобъективов с высоким разрешением можно дополнительно повысить точность навигации транспортных средств для теплиц с большой аркой [ 16 ]; а Кенан Лю и др. разработали автономную навигационную систему для робота по сбору томатов в теплице на основе лазера SLAM, который показал хорошую точность позиционирования как при прямолинейном движении, так и при поворотах в проходах шириной 80 см [ 17 ].
В заключение следует отметить, что технические исследования и применение беспилотных транспортных средств на сельскохозяйственных объектах сопряжены с многочисленными трудностями. К ним относятся сложная структура объекта, непредсказуемость роста сельскохозяйственных культур, точность и адаптивность датчиков распознавания, а также производственные затраты. В свете этих трудностей в настоящем исследовании представлена конструкция беспилотного транспортного средства, адаптированного к конструктивным особенностям современных теплиц непрерывного действия и специфическим агротехническим приемам выращивания томатов на возвышенных участках, распространенным в Китае. Проектирование включает в себя тщательный анализ критически важных компонентов, навигационных систем и комплексных механизмов управления. После этапа проектирования эксплуатационные характеристики прототипа были тщательно оценены в ходе стендовых и полевых испытаний. Главная цель данного проекта — снизить использование ручного труда, особенно в части трудоемких и дорогостоящих процессов, связанных с разгрузкой и заменой рам существующих транспортных средств. Кроме того, внедрение этой технологии направлено на повышение уровня интеллектуального управления производством овощей, выращиваемых на объектах.
2. Материалы и методы
2.1. Агрономия производства и требования
Однопролетная конструкция многопролетной теплицы и сцена посадки пасленовых овощей (томатов в качестве примера) показаны на рисунке 1. Томаты выращиваются с использованием системы поддержки лозы с лотками, как показано на рисунке 2. Один пролет томата составляет 8 м в размере, с 5 слотами для выращивания. Ширина одного слота для выращивания составляет 0,6 м, и между каждыми двумя слотами для выращивания есть проход. Проход представляет собой укрепленную дорогу шириной 0,9 м. Также есть проход между двумя концами слота для выращивания и стеной размером 2 м. Томаты высаживаются в двойные ряды, при этом лозы простираются вверх и фиксируются на месте шпагатом. Лозы вырастают до высоты 1,8–2 м.
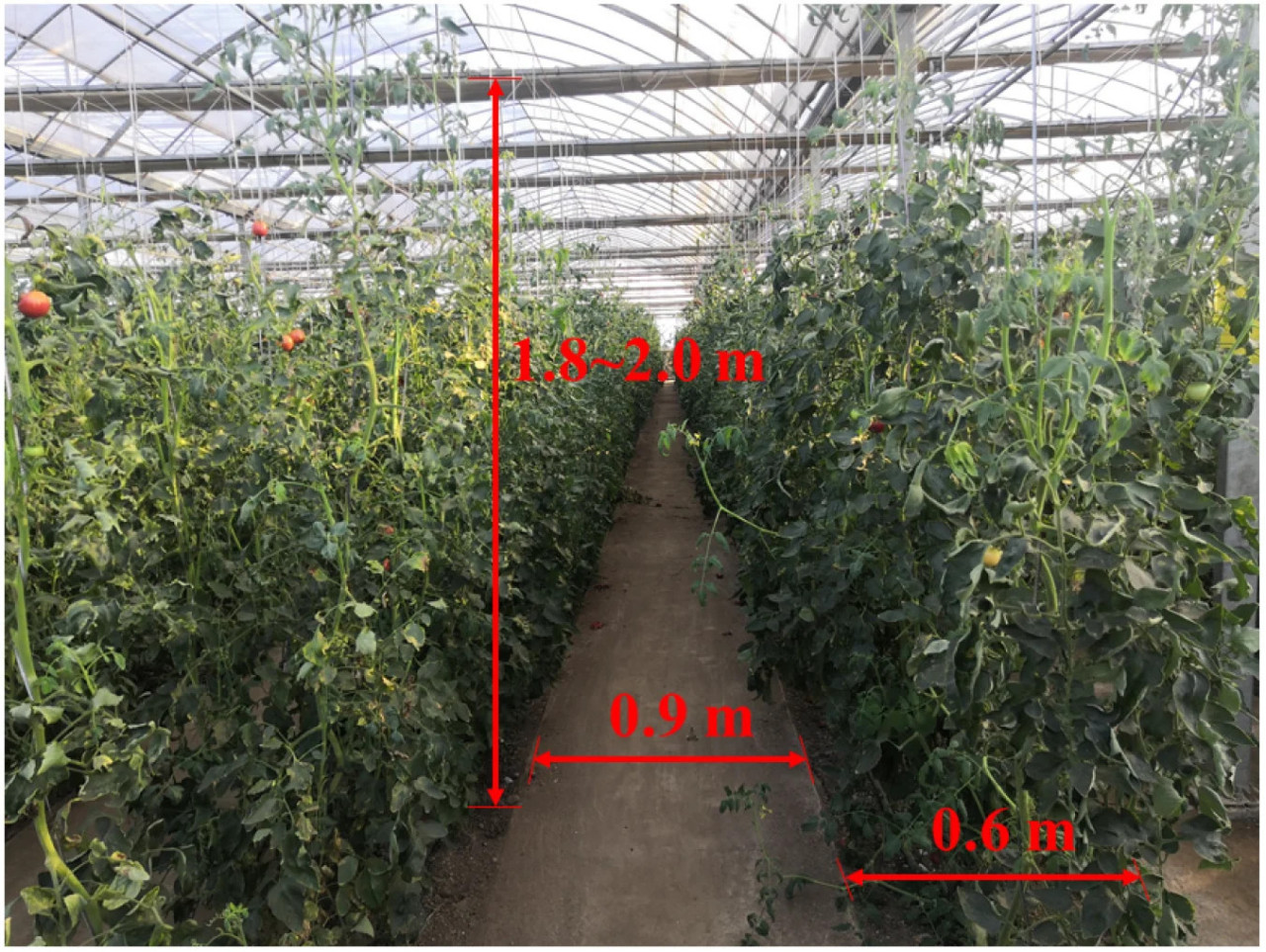
Рисунок 1. Сценарий выращивания томатов в многопролетной теплице.
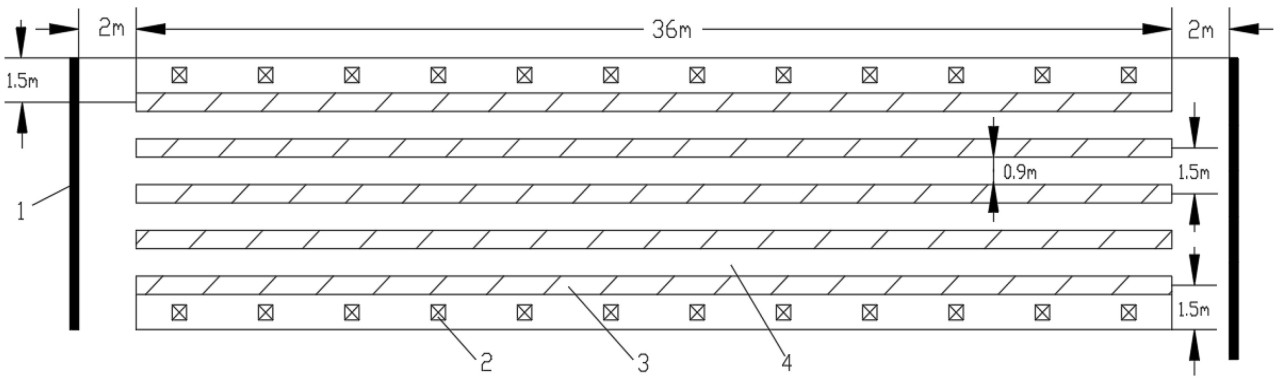
Рисунок 2. Вид сверху на сцену выращивания томатов в блоке многопролетной теплицы: 1. Стена теплицы. 2. Вертикальная колонна. 3. Посадочные ряды томатов. 4. Проход.
В условиях тепличного хозяйства беспилотные транспортные средства сталкиваются с разнообразными условиями движения. Наличие строительных материалов для теплиц и оборудования для выращивания растений, такого как шпалеры, может создавать помехи для сигналов машин, что затрудняет точность навигации этих транспортных средств. Следовательно, беспилотные транспортные средства должны придерживаться заданных маршрутов для минимизации риска повреждения урожая. Эта необходимость усугубляется ограниченностью доступного рабочего пространства, что требует точного маневрирования и пространственного восприятия.
Таким образом, для обеспечения баланса грузоподъемности и эксплуатационной гибкости беспилотного транспортного средства общие цели проектирования заключаются в следующем:
Транспортное средство, предназначенное для выращивания томатов в теплицах, должно быть не более 0,9 м в длину, обладать хорошей устойчивостью и проходимостью.
Транспортное средство должно иметь компактную конструкцию, быть экономичным, экологичным и оснащаться как ручным дистанционным управлением, так и функциями автономного вождения. Дальность дистанционного управления должна превышать 100 м, а точность навигации по прямой должна составлять ±5 см.
Он должен отвечать требованиям по транспортировке на небольшие расстояния в теплице, выдерживать минимальную нагрузку 150 кг, преодолевать уклоны до 30°, развивать максимальную скорость 8 км/ч и уметь выполнять дифференциальные повороты руля на месте.
2.2 Общая структура и принцип работы
Как показано на рисунке 3 , беспилотное транспортное средство в основном состоит из гусеничного шасси с электроприводом, несущего устройства, разгрузочного механизма, лидара, антенны и системы управления. Во время работы система управления задает маршрут пути и управляет гусеничным шасси для движения всего транспортного средства. Во время движения лидар реализует восприятие окружающей среды, включая координатную информацию о местоположении в реальном времени. После загрузки беспилотного транспортного средства товарами подается ручная команда. Транспортное средство автоматически доставляет товары к месту разгрузки, где конвейерная лента разгрузочного механизма выгружает корзину с овощами на приемное устройство. После завершения разгрузки оно продолжает возвращаться по назначенному маршруту для повторной доставки товаров.
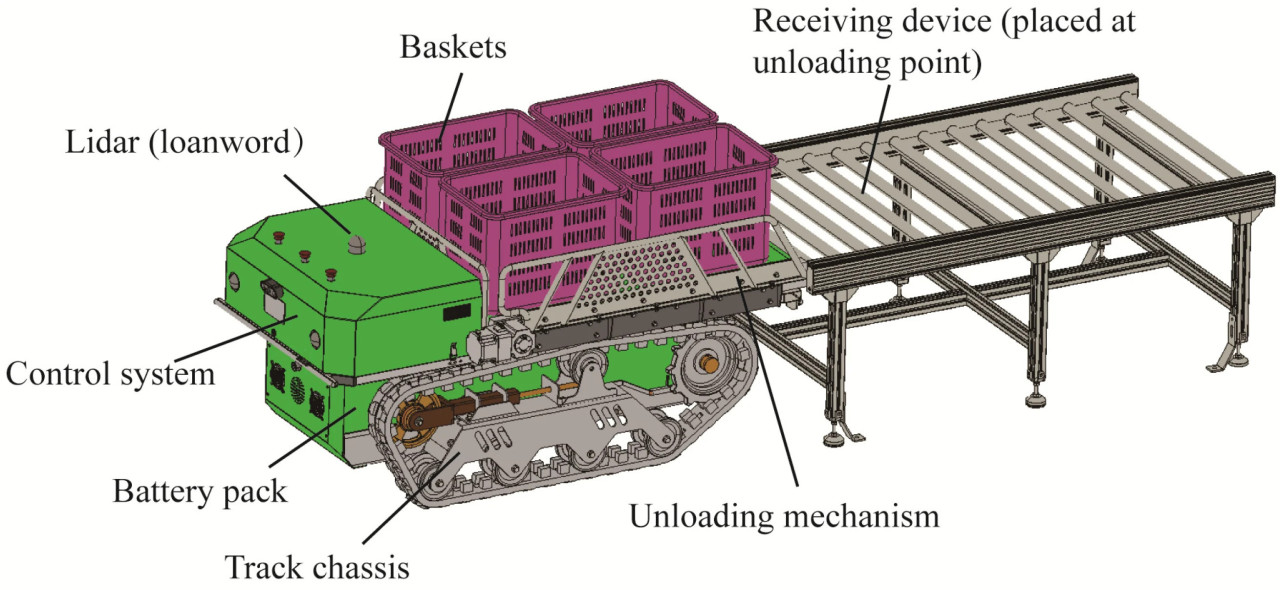
Рисунок 3. Упрощенная структурная схема беспилотного транспортного средства.
Основные технические параметры беспилотного транспортного средства приведены в таблице 1 .
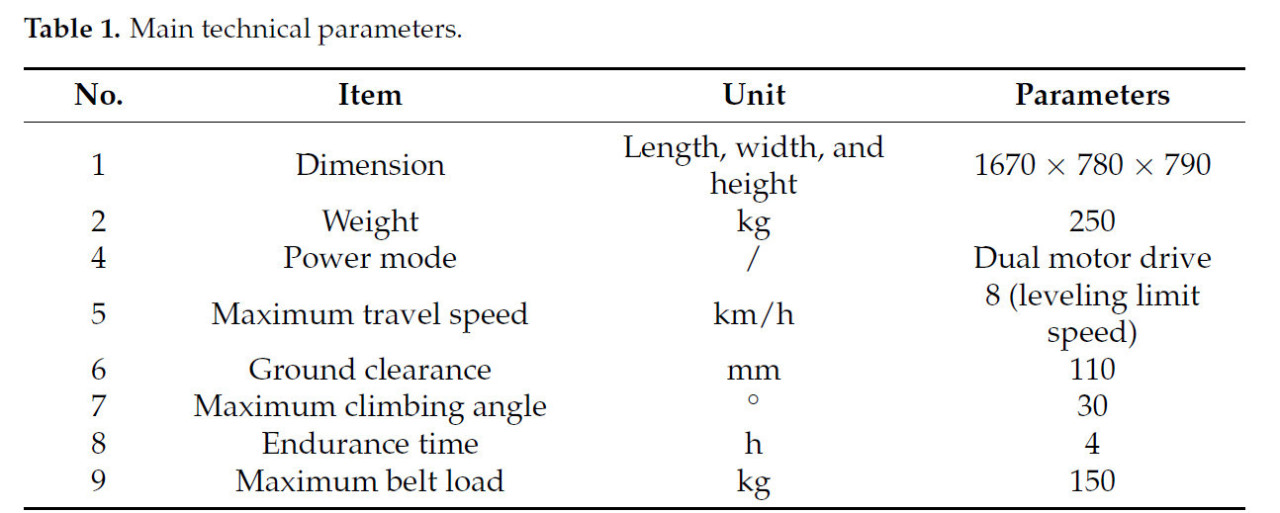
Таблица 1. Основные технические параметры.
Рабочий процесс беспилотного транспортного средства показан на рисунке 4. Беспилотное транспортное средство стартует из начальной точки P и следует по пути A1, A2, A3 и A4 последовательно к точке разгрузки Q. Вдоль пути движения установлено несколько точек остановки, где беспилотное транспортное средство останавливается в каждой точке на определенный период времени. В это время овощевод собирает помидоры возле транспортного средства и кладет их в овощные корзины на транспортном средстве. После того, как все корзины на транспортном средстве пройдут через несколько остановок, и все корзины на транспортном средстве будут заполнены помидорами, овощевод активирует дистанционное управление, нажав кнопку. Затем транспортное средство автоматически находит оптимальный маршрут к местам разгрузки. Разгрузочный механизм на транспортном средстве работает, чтобы разгружать несколько овощных корзин одну за другой. После завершения разгрузки транспортное средство перемещается в начальную точку P. Затем оно возвращается к овощеводу по установленному пешеходному маршруту, чтобы начать следующий раунд погрузки, транспортировки, разгрузки и других действий.
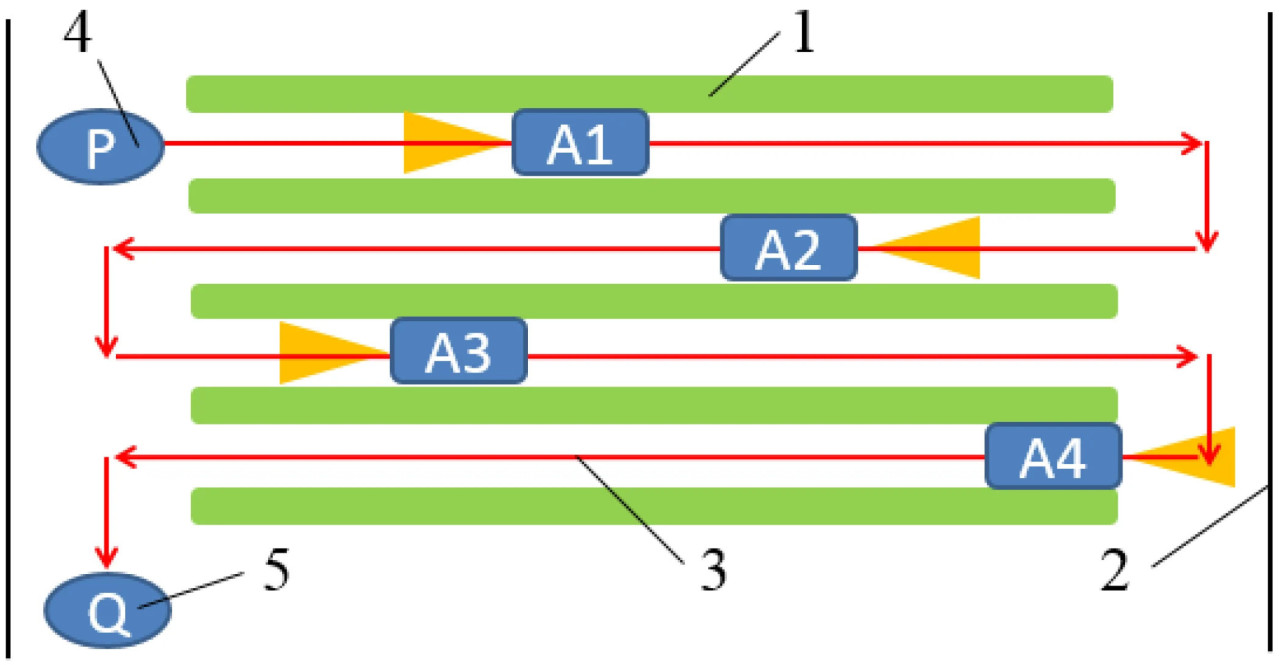
Рисунок 4. Схематическая диаграмма рабочего процесса транспортного средства: 1. Посадка рядов томатов. 2. Стены теплицы. 3. Траектория движения транспортного средства. 4. Начальная позиция транспортного средства. 5. Конечная позиция разгрузки транспортного средства P означает, что начальная точка Q является точкой разгрузки. A1, A2, A3 и A4 обозначают пути перемещения между различными резервуарами для выращивания.
2.3. Конструкция шасси электрического гусеничного трактора
Электрическое гусеничное шасси состоит из литиевой батареи, гусеничного двигателя, привода двигателя, трансмиссии и системы управления. Транспортное средство оснащено двумя двигателями передвижения, которые обеспечивают тягу для левой и правой гусеничных систем передвижения через трансмиссию соответственно. Трансмиссия состоит из редуктора, вала отбора мощности и цепного привода. Редуктор расположен в нижней части транспортного средства, его входной конец соединен с двигателем, а выходной конец – с ходовой системой через вал отбора мощности и цепной привод. Такая конструкция позволяет гусеничной системе передвижения выполнять функции локомотива шасси. В соответствии с заданными общими техническими параметрами рассчитывается мощность, требуемая электрическим гусеничным шасси в ограниченных условиях эксплуатации. При полной загрузке транспортного средства и подъёме на склон требуемая мощность максимальна; в этот момент тяга одной стороны гусеничного шасси подчиняется силе, рассчитанной по следующей формуле ( Рисунок 5 ):

где M — полная масса беспилотного транспортного средства, преодолевающего максимальный подъем при полной загрузке, 400 кг; θ — максимальный угол преодолеваемого подъема, 30°; g — ускорение свободного падения, 9,8 м/с; μ 1 — коэффициент сопротивления качению, 0,1; μ 2 — коэффициент внутреннего сопротивления, 0,05.
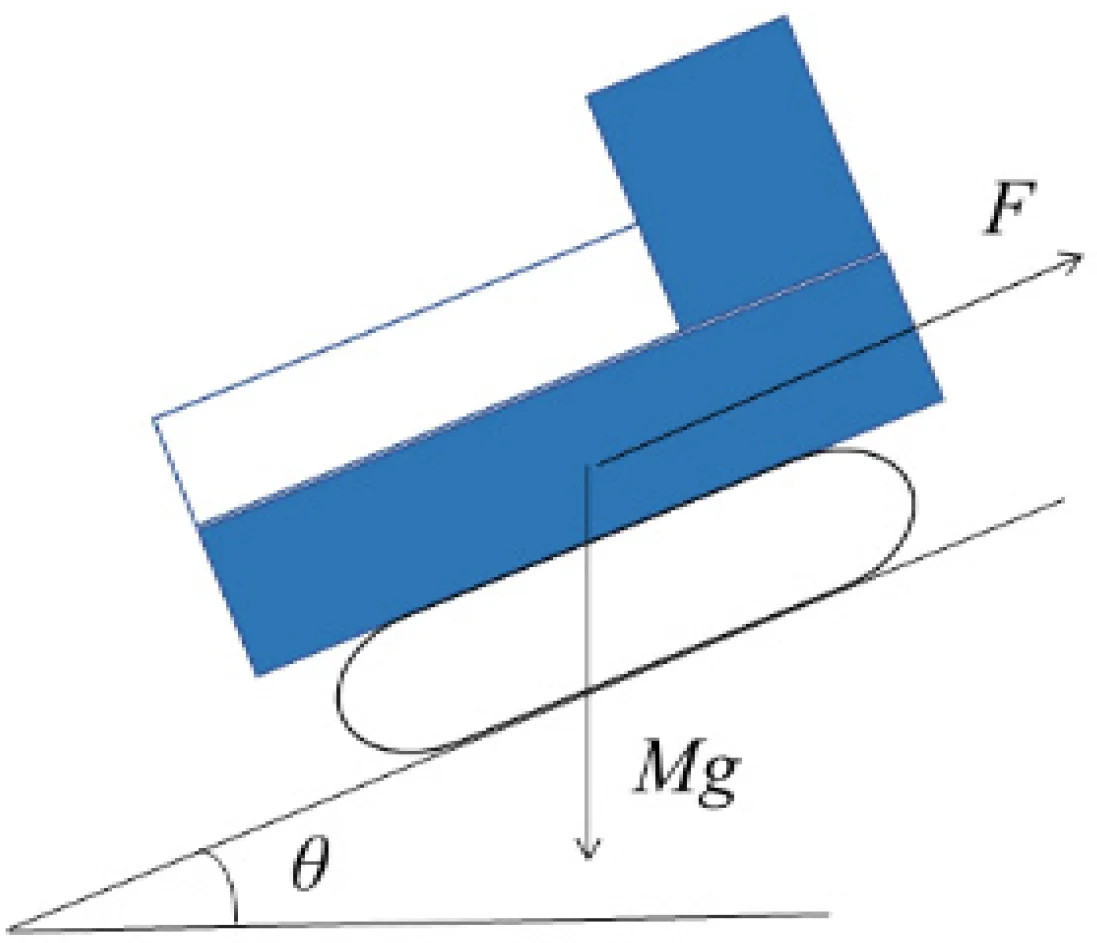
Рисунок 5. Диаграмма силового анализа подъема с полной нагрузкой.
Тогда односторонняя выходная мощность двигателя P будет следующей:

где v — скорость движения гусеничной машины при подъеме на максимальный угол, причем здесь принята половина наибольшего значения теоретической расчетной скорости на ровной местности, т. е. 4 км/ч; η — КПД цепного привода, принимаемый равным 0,95.
Мощность, потребляемая односторонним двигателем, составляет 1,445 кВт при полной загрузке беспилотного транспортного средства и максимальном подъёме на склон. С учётом безопасности системы и запаса хода, левая и правая гусеницы оснащены серводвигателем постоянного тока типа KY130ACS0425-30, который служит источником питания для всего транспортного средства. Двигатель производства компании Jinan Koya Electronic Science and Technology Company Limited (Цзинань, Китай) имеет номинальную мощность 2 кВт, номинальное напряжение 48 В и номинальную частоту вращения 3000 об/мин.
Согласно проектным требованиям, запас хода беспилотного транспортного средства t должен достигать 4 ч. При этом емкость аккумуляторной батареи должна быть обеспечена при полной загрузке тележки:

Здесь P — выходная мощность одной стороны двигателя, Вт; I — нормальный рабочий ток двух двигателей, обычно составляющий половину номинального тока I , А; а U — номинальное напряжение двигателя, В.
Согласно уравнению (3), ёмкость аккумуляторной батареи должна составлять 120,42 А·ч. Поскольку номинальное напряжение электродвигателя составляет 48 В, установлены восемь отдельных аккумуляторных батарей типа KSTAR 6-FM-65 с номинальным напряжением 12 В и номинальным током 65 А (производства компании Guangdong KSTAR Industrial Technology Co., Ltd., г. Хуэйчжоу, Китай). Четыре отдельных аккумуляторных батареи сначала соединены последовательно, а затем параллельно для обеспечения рабочих характеристик двигателей.
2.4. Проектирование системы управления
Согласно функциональным требованиям к беспилотному транспортному средству, его электронная система управления должна обеспечивать управление шагающим силовым модулем, управление разгрузочным модулем, управление связью различных модулей, мониторинг заряда аккумуляторной батареи и другие функции. Как показано на рисунке 6 , электронная система управления транспортного средства разделена на три основные части с высоковольтной системой электропривода. Система также включает в себя контроллер транспортного средства (VCU), двигатель и его контроллер (MCU), блок аккумуляторных батарей и его систему управления (BMS), а также другое сенсорное и контрольное оборудование.
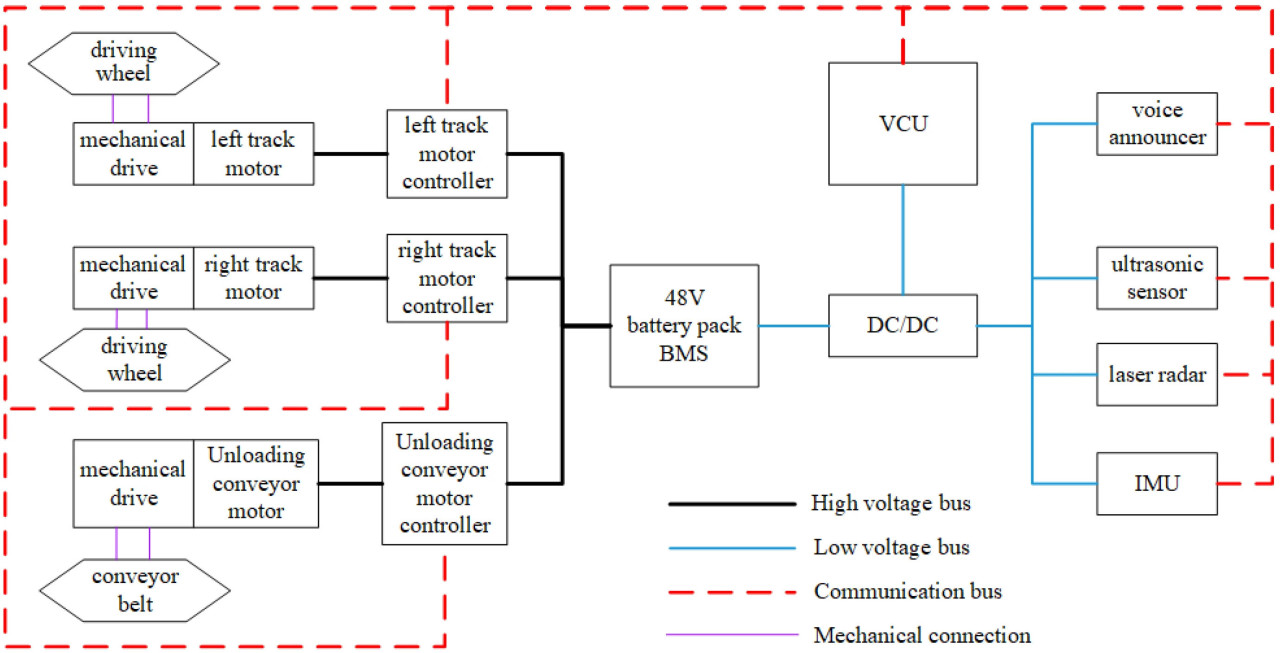
Рисунок 6. Общая схема электронной системы управления.
Контроллер транспортного средства отвечает за обеспечение бесперебойной связи с каждым контроллером двигателя, системой дистанционного управления и различными датчиками. Он также играет ключевую роль в мониторинге и оповещениях о состоянии электропитания и неисправностях. Блок управления двигателем в основном включает в себя две ключевые функции: управление ходьбой и управление разгрузкой и транспортировкой.
Для управления ходьбой система использует двухмоторный привод для движения влево и вправо. Крутящий момент и скорость двигателей с обеих сторон регулируются независимо в зависимости от условий эксплуатации. Это обеспечивает точный контроль над движением транспортного средства, позволяя ему двигаться вперёд, назад и поворачивать благодаря дифференциальному управлению скоростями вращения.
Контроллер двигателя разгрузки управляет скоростью двигателя разгрузки, что позволяет контролировать процесс разгрузки и транспортировки. Контроллер регулирует скорость двигателя в зависимости от продолжительности разгрузки и веса груза, обеспечивая эффективный и контролируемый процесс разгрузки.
Беспилотное транспортное средство, установленное в теплице, может работать в двух режимах: дистанционном управлении и автономном вождении. Схема управления представлена на рисунке 7. Выбор режима осуществляется с помощью тумблера, расположенного в левом верхнем углу пульта дистанционного управления.

Рисунок 7. Схема управления в двух режимах (дистанционное управление и автономная навигация).
В режиме дистанционного управления переключатель находится в среднем положении. В этом режиме фермер может отдавать рабочие команды в соответствии с требованиями рабочего участка, управляя левым и правым джойстиками на пульте дистанционного управления. Эти команды передаются по беспроводной связи в блок управления транспортным средством (VCU), который затем управляет транспортером для свободного перемещения к заданному месту.
При переводе тумблера в правое положение транспортное средство переходит в режим автономного движения. Контроллер автономной навигационной системы (ANA) передаёт сигналы скорости вращения левого и правого приводов гусениц по шине CAN. Блок VCU получает эти сигналы скорости и передаёт данные соответственно приводам левого и правого приводов гусениц по интерфейсу CAN для автоматического управления транспортёром. Кроме того, он оценивает, достигнуто ли место разгрузки, сверяясь с координатами местоположения, и таким образом определяет, следует ли начинать разгрузку.
Наконец, когда рычаг переключения находится в левом положении, транспортер остается неактивным.
2.5 Проектирование систем позиционирования и навигации
2.5.1 Общая программа
Согласно проекту, система платформы беспилотного транспортного средства включает в себя полную 3D лазерную SLAM-систему и навигационную систему. Тесно связанное решение SLAM на основе оптимизированного для графов лидара (TM-LIDAR-16 от Wuhan Tianmou Optoelectronics Technology Co., Ltd., Ухань, Китай) и инерциальной навигационной системы IMU (серии LPMS-NAV3 от Guangzhou Alubi Electronic Technology Co., Ltd., Гуанчжоу, Китай) создает 3D карту облака точек тепличной среды, которая затем проецируется на 2D растровую карту для предоставления навигационной системе задания на построение. Навигационная система включает в себя глобальный алгоритм планирования пути и алгоритм отслеживания пути TEB. На построенной спроецированной растровой карте алгоритм A* используется в качестве глобального планировщика пути для первоначального определения безопасного и надежного начального пути. Путь, сгенерированный глобальным планированием, отслеживается алгоритмом отслеживания пути TEB для расчета скорости, необходимой для выполнения навигационной задачи. Решение навигационной системы для беспилотного транспортного средства показано на рисунке 8 .
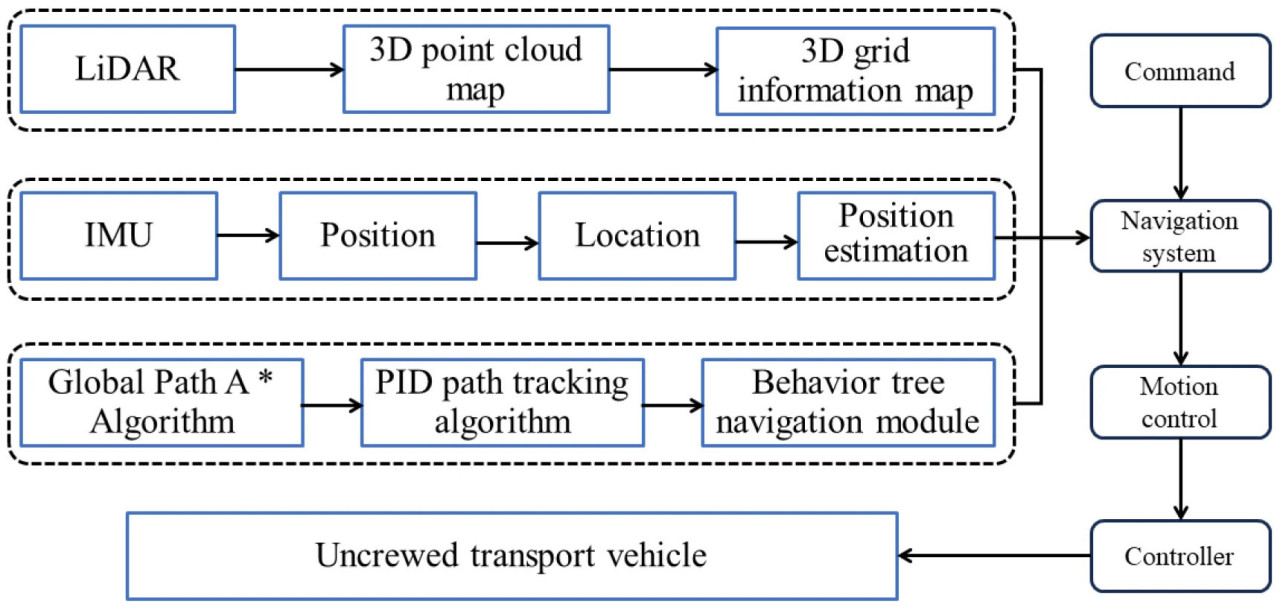
Рисунок 8. Общая схема навигационной системы.
Поток навигационных задач беспилотного транспортного средства показан на рисунке 9. Когда беспилотное транспортное средство перемещается в начальную точку заданной остановки в теплице, его текущее положение определяется путем глобальной регистрации с предварительно построенной картой теплицы. При получении команды «запустить задачу» навигационная система использует заданные дискретные точки стыковки в качестве входных данных для модуля глобального планирования пути (A*). Затем формируется непрерывная траектория, которая передается в локальный модуль отслеживания пути (TEB) для отслеживания траектории. Локальный модуль отслеживания пути рассчитывает скорость на основе текущего положения робота и степени перекрытия траектории и, наконец, формирует комбинированную команду линейной и угловой скорости для отправки на привод двигателя для реализации функции автономной навигации беспилотного транспортного самосвала. Когда беспилотный транспортный самосвал обнаруживает, что беспилотный транспортный самосвал достиг каждой точки стыковки, он отправляет команду нулевой скорости до тех пор, пока не достигнет точки разгрузки, чтобы ожидать, пока робот не выгрузит товары. Затем он возобновляет отслеживание глобального пути после завершения разгрузки, реализуя таким образом полный процесс работы.
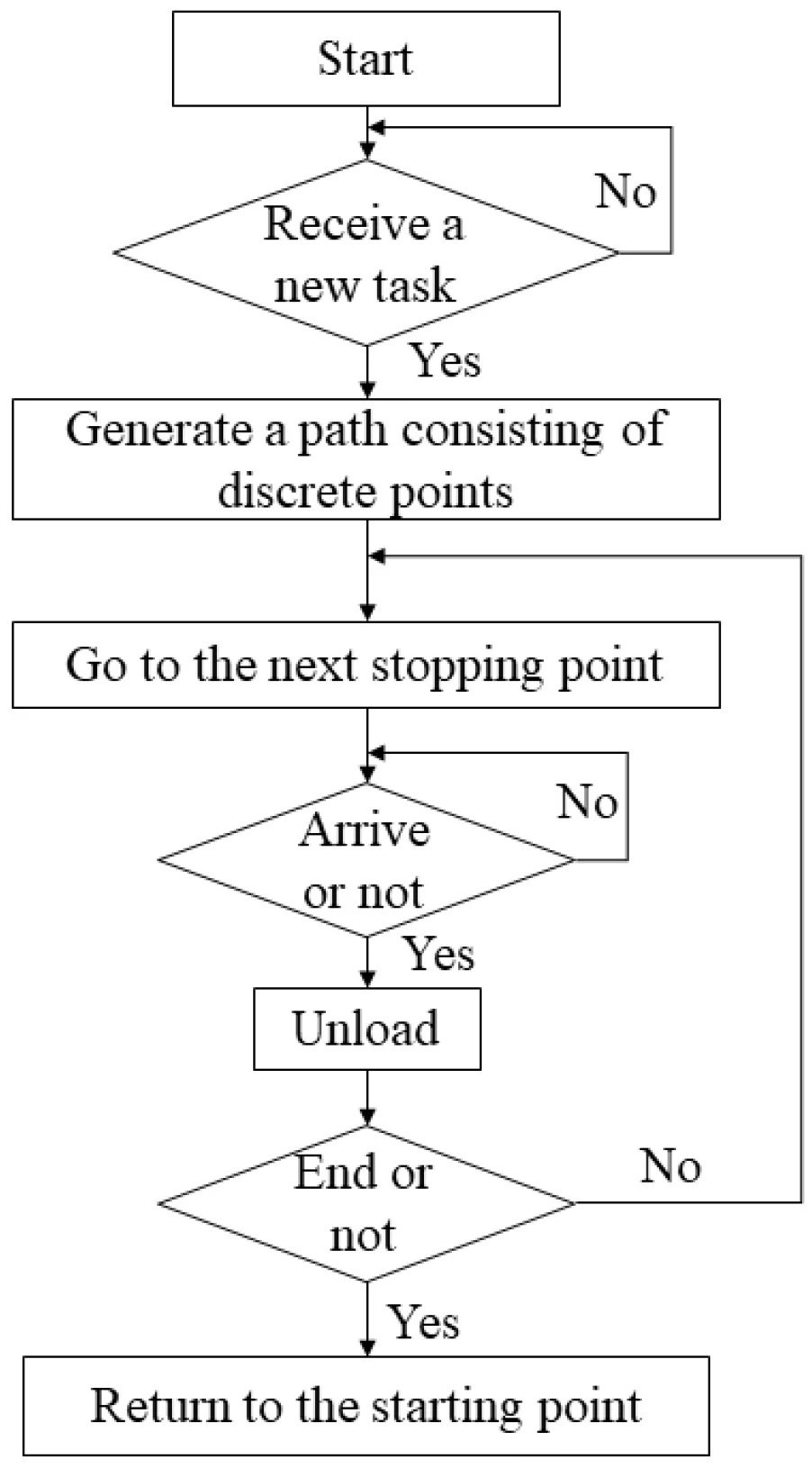
Рисунок 9. Блок-схема навигационной задачи.
2.5.2. Алгоритм SLAM с тесной связью лидара и инерциального измерительного блока на основе оптимизации графа
Нацеливаясь на проблему, заключающуюся в том, что традиционный алгоритм лазерного SLAM имеет определенный дрейф оценки движения при картографировании больших сцен, что приводит к низкой точности позиционирования и картографирования, в этом исследовании применяется тесно связанный метод одометрии и картографирования с использованием ЛИДАРа и инерциального наведения, основанный на оптимизации графа [ 18 ], и, как на рисунке 10 , процесс делится на следующие этапы:
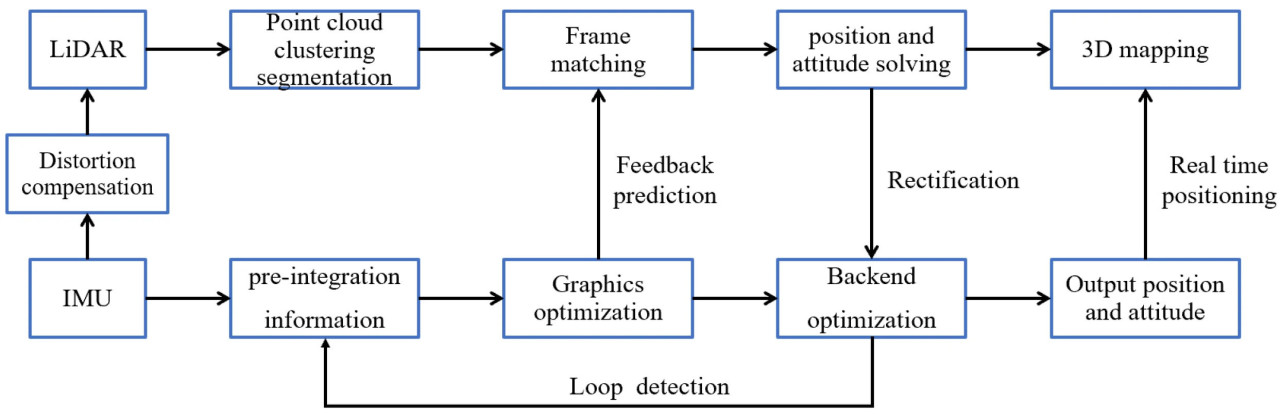
Рисунок 10. Схема тесно связанной структуры одометрии лидара и инерциального наведения.
Проекция облака точек и целевая сегментация
Интерфейс организует и управляет данными выходного облака точек LiDAR, создавая древовидную структуру, а затем использует данные высокочастотного инерциального наведения IMU для коррекции и компенсации аберрантного облака точек LiDAR, компенсируя аберрации движения, создаваемые облаком точек лазера. После сегментации точек на поверхности земли алгоритм поиска в ширину [ 19 , 20 ] (BFS) используется для кластеризации и сегментации всех пикселей глубины на карте глубины, не связанной с поверхностью земли.
Извлечение признаков и лазерная одометрия
Линейные и поверхностные объекты отбираются в соответствии с гладкостью соседних точек. Наземные объекты, линейные объекты и поверхностные объекты сопоставляются с точечными и плоскими, точечными и прямолинейными, а также точечными и плоскими объектами соответственно. На основе алгоритма LeGO_LOAM [ 21 , 22 ] строится нелинейное уравнение оптимизации, и алгоритм LM используется для пошагового решения задачи относительного положения наземных объектов, неземных объектов и поверхностных объектов.
Оптимизация графа и 3D-картографирование
Бэкэнд использует метод оптимизации графа для объединения данных предварительной интеграции инерциального измерительного блока (IMU), данных одометра LiDAR и данных обнаружения закольцованных объектов, а также алгоритм инкрементального сглаживания и картирования (ISAM) [ 23 ], основанный на оптимизации графа факторов, для выполнения общей оптимизации карты положения. Затем бэкэнд визуализирует облако точек, траекторию и построенную сеть карты положения для завершения построения трёхмерной карты.
2.5.3. Проектирование планирования пути
Планирование пути определяет дальность и режим движения транспортного средства в теплице, что является предпосылкой беспилотной эксплуатации. Качество алгоритма планирования пути напрямую влияет на эффективность транспортировки. Поскольку транспортное средство должно останавливаться в заданных проходах, а также в определенных точках ( рис. 11 ), в закрытой рабочей зоне выбираются алгоритмы A* [ 24 , 25 ] и RRT [ 26 ], применимые к планированию траектории по дискретным точкам, а в качестве целей планирования пути транспортного средства принимаются кратчайшее расстояние и кратчайшее время от точки остановки до точки разгрузки.
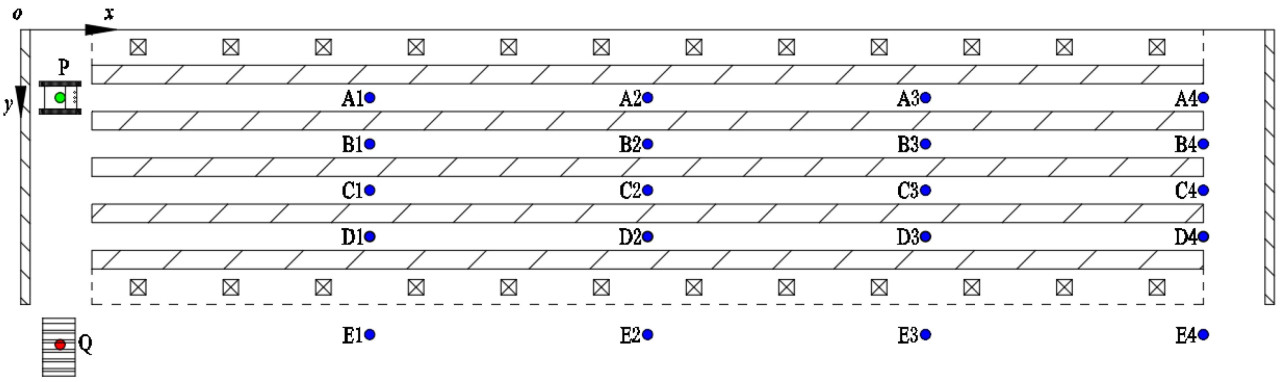
Рисунок 11. Положение канала движения и точки остановки транспортного средства при планировании пути.
Первым шагом в планировании маршрута является получение информации об окружающей среде путем построения карты. В статических средах обычно применяется метод растеризации. Для более точной реализации растеризации размер каждого растра увеличивается. Это необходимо для увеличения фактической модели теплицы в равных пропорциях. Транспортное средство можно рассматривать как точечную массу, в то время как стены, колонны и посадочные канавки обозначены как чёрная часть, то есть препятствия. Остальная часть белой части представляет собой проезжую часть. Зелёный, синий и красный шары обозначают начальную точку, конечную точку и точку разгрузки соответственно.
Маршрут, показанный на рисунке 12, был получен экспериментальным путем. Зеленые, синие и красные точки на рисунке обозначают начальную точку, характерную остановку во время работы и точку назначения разгрузки. Красная линия представляет собой путь, спланированный различными алгоритмами. Как видно из рисунков 12 а, б, пути двух алгоритмов практически одинаковы. Однако алгоритм RRT значительно увеличивает количество пройденных узлов вблизи остановки по сравнению с алгоритмом A* [ 27 ]. Длина пути алгоритма RRT составляет 31, что на 10 длиннее пути алгоритма A* для того же пути. Время работы RRT составляет 0,33 с, что на 0,26 с больше времени работы алгоритма A*. Алгоритм A* требует меньше времени на планирование пути, имеет меньшую вычислительную сложность и более эффективен. Поэтому, учитывая фактическую погрешность работы, в данном исследовании выбран алгоритм A*.
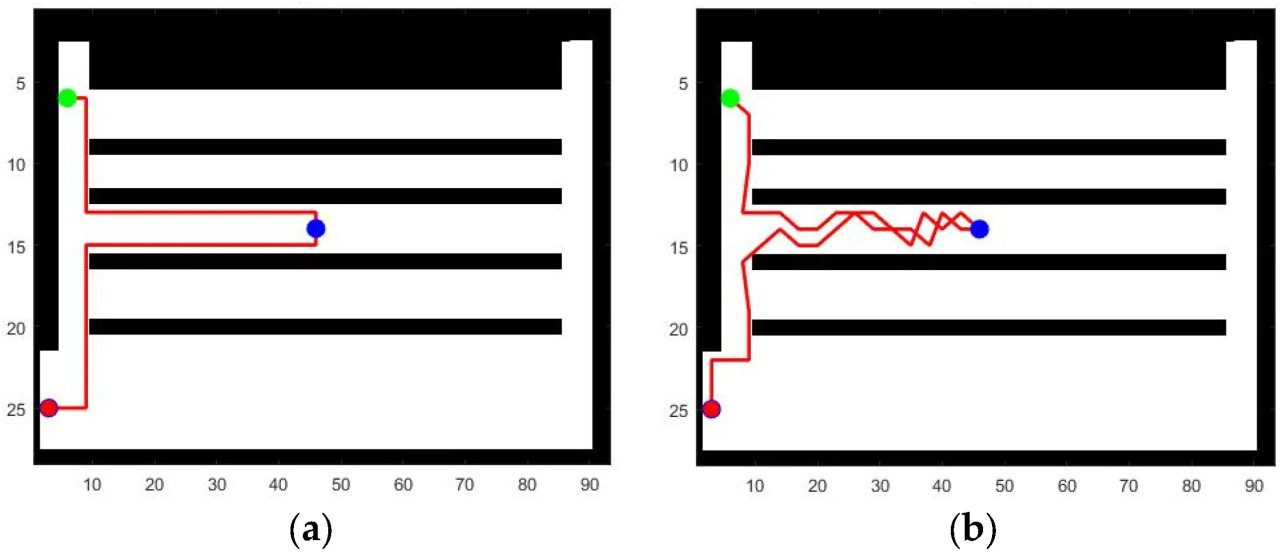
Рисунок 12. Экспериментальные результаты различных алгоритмов планирования пути: ( a ) алгоритм A* и ( b ) алгоритм RRT. Зелёный шар обозначает начальную точку, синий шар — точку остановки, а красный шар — точку разгрузки.
2.5.4. Управление отслеживанием пути
Транспортное средство представляет собой гусеничную конструкцию, которая реализует движение вперед и назад транспортного средства, а также поворот на месте путем регулирования скорости и направления гусениц с обеих сторон. Предполагается, что гусеничное шасси является жестким телом, что гусеницы не подвергаются значительной деформации и относительному скольжению во время движения, и что центр масс транспортного средства совпадает с его геометрическим центром, как показано на рисунке 13. Построена модель движения транспортного средства в плоскости, установлена земная система координат xoy , в которой мгновенный центр вращения транспортного средства равен O c , направление вперед задается как положительное направление оси x ', а его вертикальное направление задается как положительное направление оси y '. Линейная скорость движения левой и правой гусениц вокруг ведущего колеса записывается как v Ho v , скорость вперед геометрического центра транспортера равна v , v , а угол направления оси x равен θ ; B — межосевое расстояние левого и правого рельсов, а L — длина заземления рельсов.

Рисунок 13. Кинематическая модель транспортера.
Кинематическая модель транспортера представлена на рисунке 13. Видно, что кинематические уравнения геометрического центра транспортного средства имеют следующий вид:

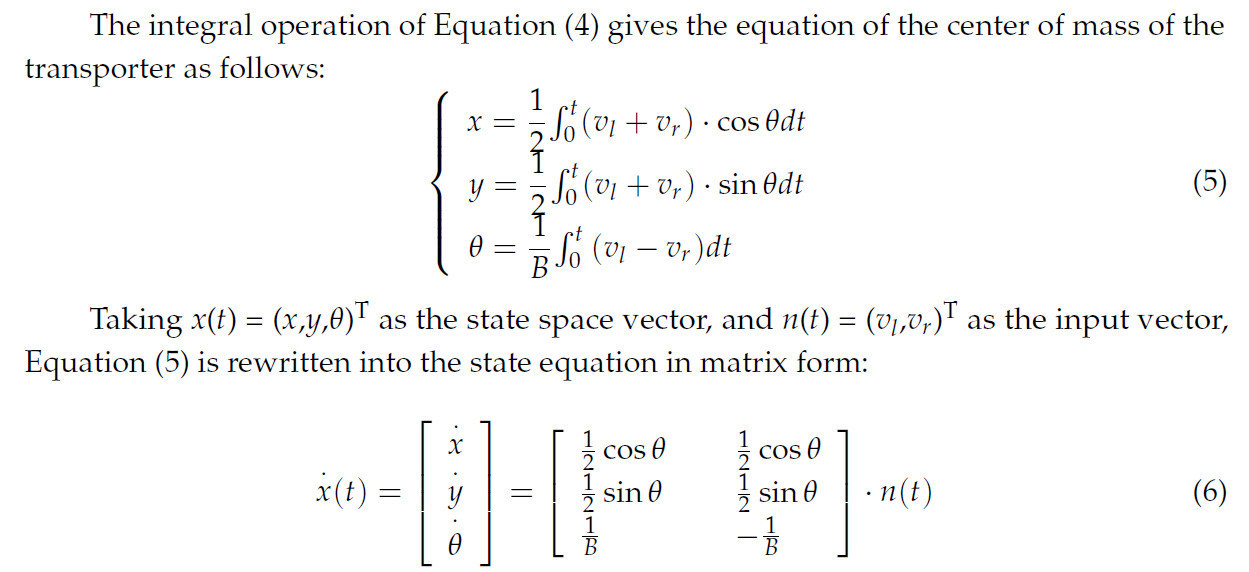
Из уравнения (6) следует, что центр масс гусеничного транспортера является функцией скорости движения левой и правой гусениц, а положение движения в любой момент времени может быть получено из скорости движения левой и правой гусениц, что также является теоретической основой для анализа управления движением гусеничного транспортера.
Отслеживание пути, заложенное в конструкцию контроллера, позволяет системе точно следовать заданному пути для достижения целевой точки, что реализует конечный этап автономного передвижения. ПИД-регулятор обладает такими преимуществами, как простота алгоритмов, высокая надежность и высокая производительность, широко применяется в промышленных системах управления, робототехнике и других отраслях, став наиболее распространенным методом управления.
Нечеткий алгоритм ПИД-регулирования используется для ограничения перерегулирования и повышения устойчивости системы, а также для повышения точности и устойчивости автоматического движения транспортного средства путем регулировки в реальном времени параметров управления k p, k i и k d ( рисунок 14 ).

Рисунок 14. Принципиальная схема ПИД-регулирования.
Входом ПИД-регулятора является сигнал ошибки e ( t ). Эта ошибка обрабатывается с помощью операций отношения, интегрирования и дифференцирования для коррекции отклонения системы и приведения её в желаемое состояние. На практике необходимо дискретизировать выборку отклонения и выразить стандартный выход ПИД-регулятора дискретно через выходную величину u ( t ) [ 28 , 29 ]:

Здесь e ( t ) представляет собой значение отклонения, n 0 ( t ) — желаемое значение, а n ( t ) — текущее фактическое значение; k p , k i и k d представляют собой пропорциональные, интегральные и дифференциальные коэффициенты соответственно;𝑘𝑖=𝑘𝑝⋅ 𝑇𝑇𝐼,𝑘𝑑=𝑘𝑝⋅𝑇𝐷𝑇, а T — период выборки, T I — интегральная постоянная времени, а T D — дифференциальная постоянная времени; e ( t ) представляет систематическое отклонение системы в момент t ; а e ( t − 1) представляет систематическое отклонение системы в момент t − 1.
Для настройки параметров ПИД-регулятора в данной статье используется инструментарий PID Tuner в программном обеспечении Matlab 2018a, с помощью которого можно эффективно спроектировать ПИД-регулятор и автоматически настроить параметры для соответствия требуемым характеристикам управления системы.
3. Эксперимент и анализ результатов
3.1. Анализ симуляции
В среде моделирования Matlab построена модель ПИД-регулятора. Для традиционного ПИД-регулятора пропорциональные, интегральные и дифференциальные параметры определяются методом проб и ошибок. В итоге параметры определяются следующим образом: k p = 5, k i = 0,2 и k d = 0,1. Для проверки робастности разработанного в данной статье регулятора рассматриваются характеристики управления при различных ожидаемых изменениях траектории. На рисунке 15 показаны результаты моделирования отслеживания траектории транспортного средства под управлением ПИД-регулятора. Ожидаемые траектории на рисунках 15 a–c представляют собой прямую линию, кривую и окружность. Видно, что при данной стратегии управления выходной сигнал системы может очень хорошо достигать заданного значения, а время настройки очень короткое на протяжении всего процесса. Это показывает, что разработанный ПИД-регулятор обладает хорошим откликом системы, способной быстро корректировать выходной сигнал системы с малой ошибкой и иметь небольшую статическую ошибку после стабилизации. Транспортное средство может четко отслеживать различные траектории (прямые, кривые и окружности) под действием ПИД-регулятора, вовремя корректировать свое положение и адаптироваться к изменениям различных путей.
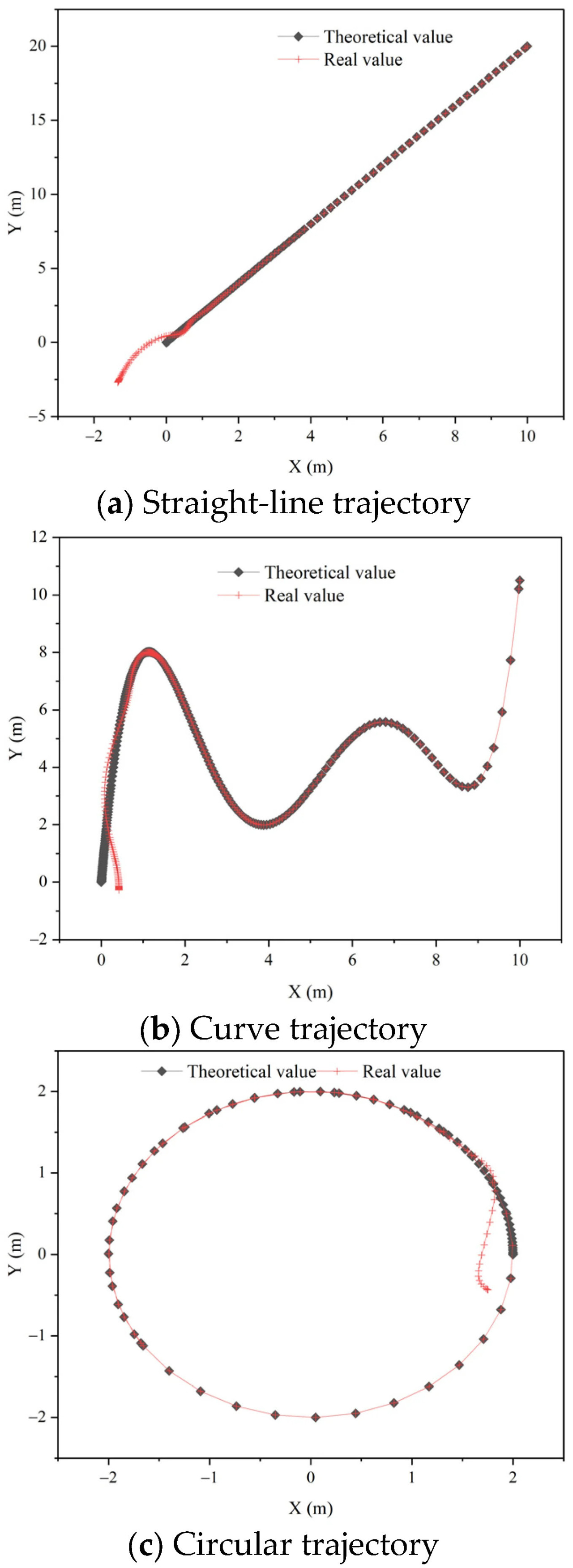
Рисунок 15. Результаты отслеживания траекторий движения транспортного средства.
В качестве примера рассмотрим круговую траекторию. Начальное положение было изменено с исходного [X, Y, Theta] = [3, 0, 0] на [X, Y, Theta] = [1, 1, 1]. Результаты моделирования представлены на рисунке 16. Видно, что система по-прежнему способна отслеживать круговую траекторию.
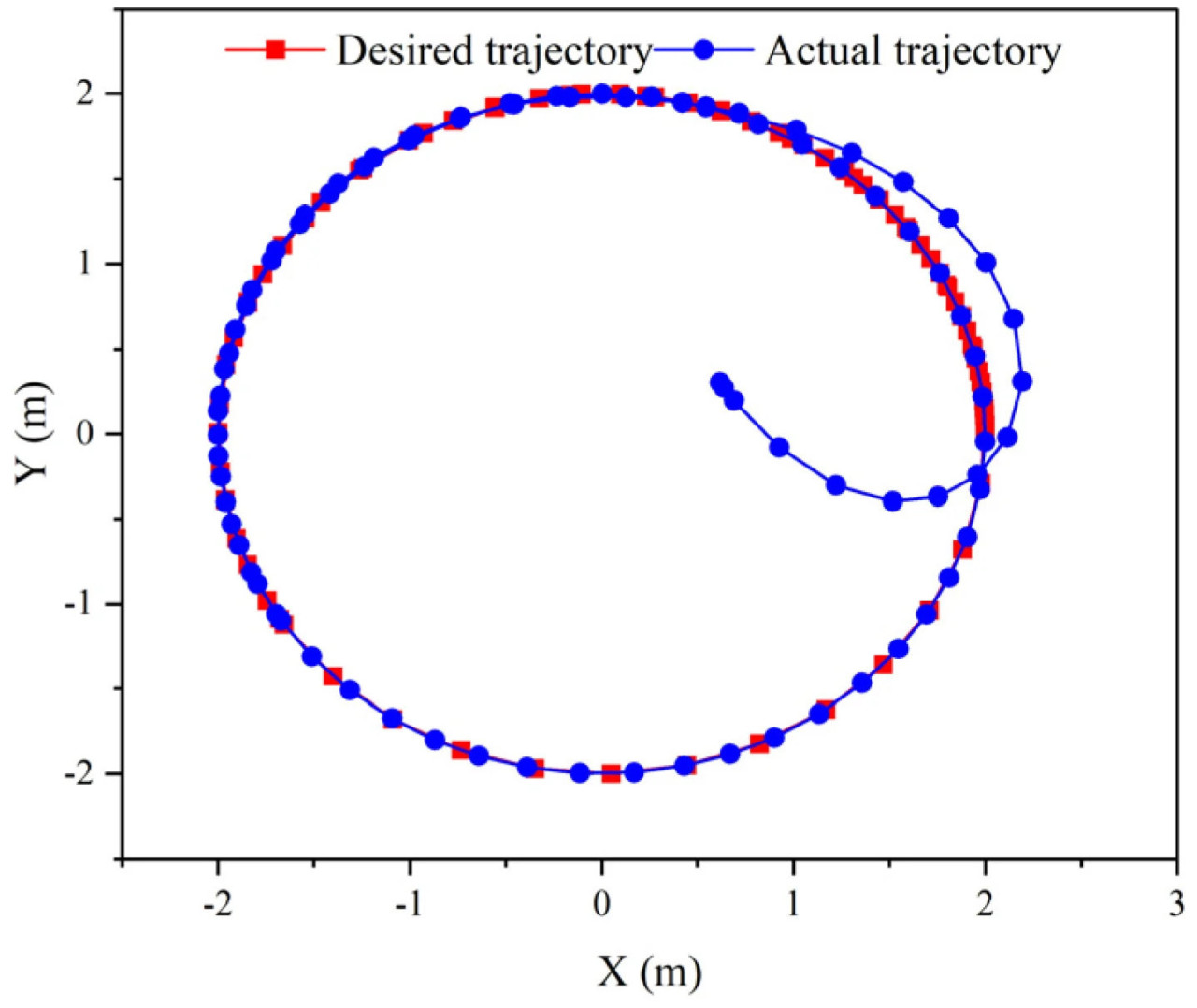
Рисунок 16. Круговая траектория ПИД-регулятора с изменением начального положения.
Ошибки x, y и тета как функции времени показаны на рисунке 17. Анализ кривых ошибок показывает, что ошибки системы остаются небольшими и в конечном итоге приближаются к нулю, что указывает на достижение системой идеального отслеживания круговой траектории. Таким образом, система отслеживания траектории с ПИД-регулятором, разработанная в данной статье, демонстрирует превосходную надёжность.
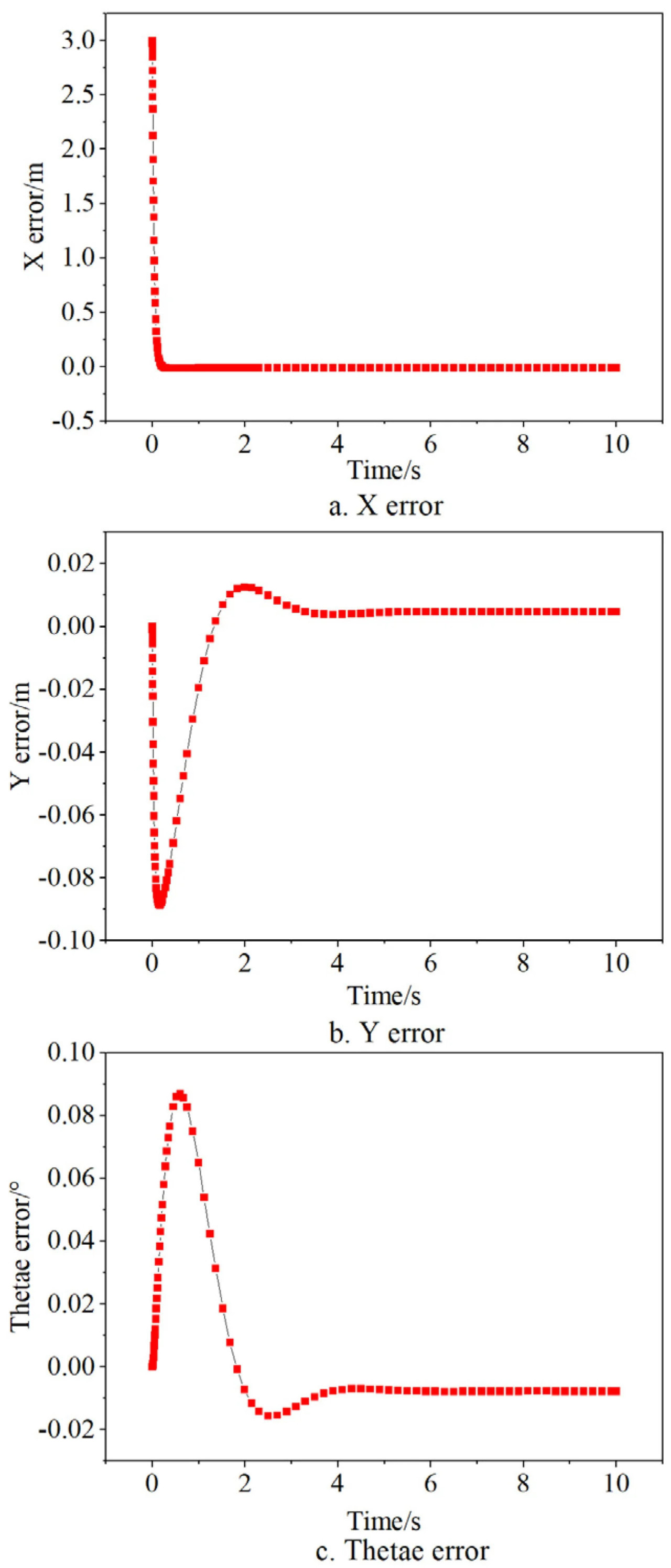
Рисунок 17. Кривые погрешности ПИД-регулятора.
Эффект управления отслеживанием кривой траектории транспортного средства на разных скоростях моделируется, и результаты показаны на рисунке 18. Как видно из рисунка 18 , а, определено большее начальное отклонение в 50 см. При разных скоростных условиях перерегулирование управления отклонением бокового положения существенно не меняется. По мере увеличения скорости время, необходимое для достижения откликом состояния устойчивого состояния, постепенно уменьшается. Наибольшее время, необходимое для достижения устойчивого состояния, составляет около 2,10 с при скорости 2 км/ч. На данный момент начальное отклонение в 50 см было скорректировано до всего лишь 2,3 см. Если отклонение достигает 2,3 см при скорости 8 км/ч, это занимает всего 0,92 с. Как видно из рисунка 18 б, при заданном начальном отклонении в 30° перерегулирование управления отклонением угла курса существенно различается при разных скоростных условиях. С увеличением скорости перерегулирование значительно уменьшается, а время достижения устойчивого состояния около 5° сокращается. Время достижения устойчивого состояния на низкой скорости 2 км/ч и высокой скорости 8 км/ч составляет 1,6 и 0,59 с соответственно. Это свидетельствует о том, что разработанный ПИД-регулятор обладает хорошим адаптивным эффектом управления к интерференции факторов скорости и способен обеспечить быстрое и устойчивое управление.
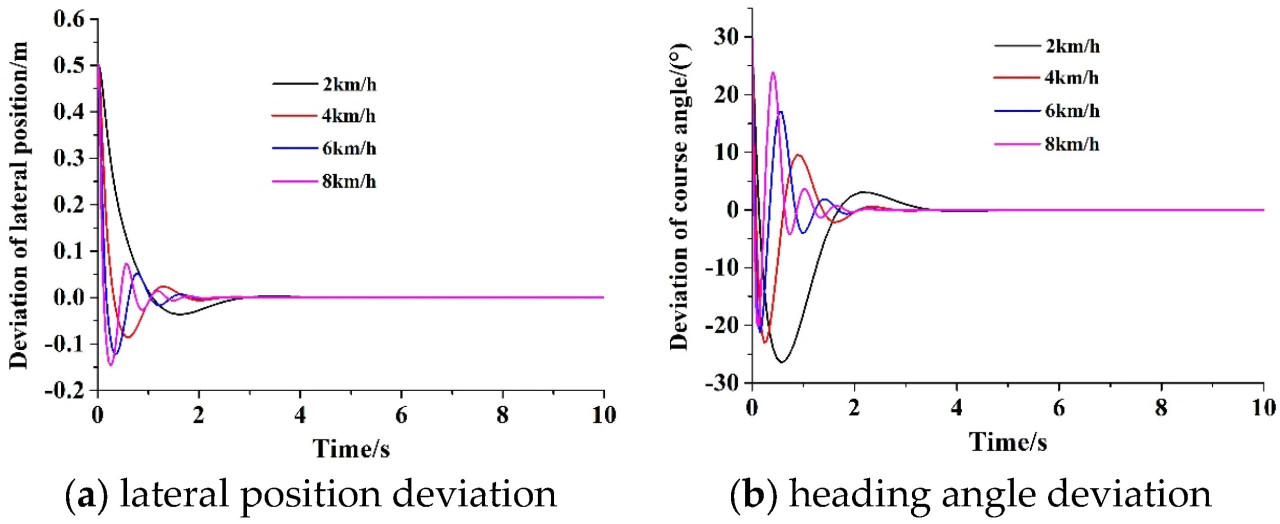
Рисунок 18. Ошибка отслеживания траектории кривой на разных скоростях.
3.2. Картографирование и анализ многопролетной тепличной среды
Использование 16-линейного LiDAR с большим диапазоном решает проблему, заключающуюся в том, что однолинейный лидар с меньшим диапазоном не может правильно построить всю среду теплицы в среде без особенностей в пределах диапазона; алгоритм LeGO_LOAM используется для построения карты теплицы, а установление карты среды обеспечивает точный путь движения для движения тележки [ 30 , 31 ]. Как видно на рисунке 19 , карта облака точек, созданная алгоритмом LeGO_LOAM, в целом представляет собой квадрат. Контуры каркаса, колонн, стен и других частей непрерывной теплицы более очевидны. Даже после того, как томат вырастет, все еще можно использовать верхнюю часть каркаса, балок и других структурных контуров для предоставления более точных данных позиционирования для навигации. Это может избежать повторяющейся работы по построению одной и той же посадочной теплицы несколько раз.
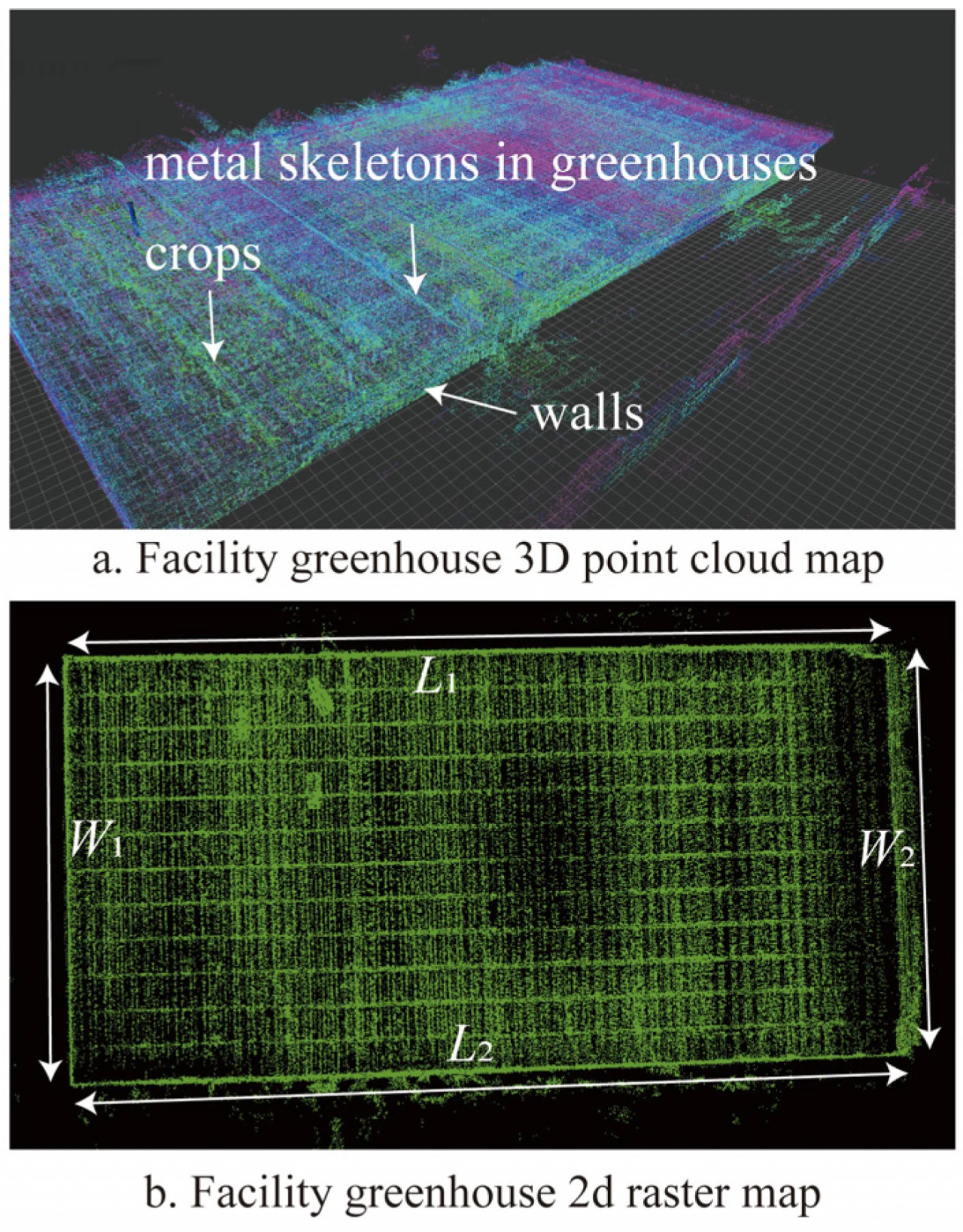
Рисунок 19. Диаграмма эффекта виртуального моделирования тепличной среды.
Общая площадь теплицы составляет около 3800 м², она прямоугольная, длиной 96 м и шириной 40 м. Были измерены размеры сетки теплицы и сопоставлены с фактическими данными. Результаты представлены в таблице 2. Максимальное отклонение между фактическими размерами и размерами сетки составило 2,24 см, минимальное – 1,67 см, а среднее – 1,94 см. Отклонения соответствуют индексу картографирования автономной навигационной системы. При этом значения отклонений очень близки, что подтверждает устойчивость алгоритма LeGO_LOAM.
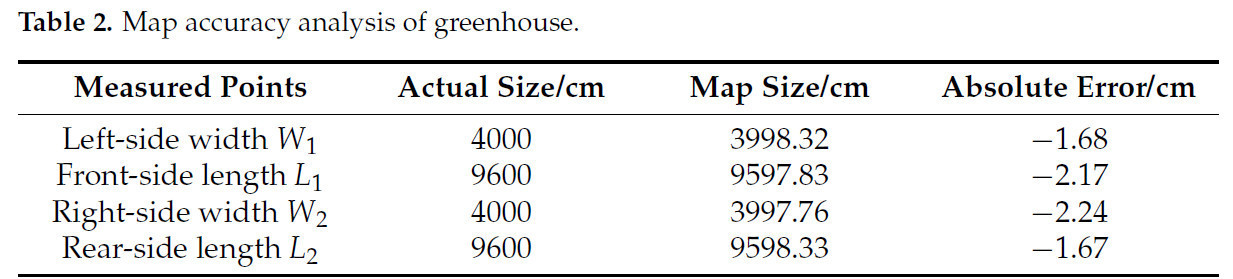
Таблица 2. Анализ точности карты теплицы.
3.3 Анализ теста
В октябре 2024 года на многопролётной тепличной базе в Гули, городе Нанкин, провинция Цзянсу, были проведены эксплуатационные и контрольные испытания прототипа. Основными испытаниями станут ходовые качества беспилотного транспортного средства, включая проверку проходимости, устойчивости, грузоподъёмности и отслеживания траектории.
3.3.1. Испытание производительности транспортировки
Прототип был установлен на открытой площадке на земле, и были проведены испытания на скоростные характеристики. В качестве инструментов для испытаний использовались кожаная линейка и секундомер. Внешние условия были одинаковыми, и секундомер использовался для регистрации времени, в течение которого беспилотный аппарат проходил расстояние 20 м со скоростями 0,3, 0,6 и 0,9 м/с. Каждая скорость была протестирована пять раз, и было взято среднее значение. Относительная погрешность Δ между фактической и теоретической продолжительностью рассчитывалась по формуле (8):

где Δ — относительная погрешность между фактической и теоретической длительностью; t — фактическая длительность, с; а t — теоретическая длительность, с.
Испытание скорости беспилотного транспортного средства было проведено путем замены загруженного груза на беспилотное транспортное средство, и результаты показаны в Таблице 3. Можно обнаружить, что относительная погрешность времени движения увеличивается с увеличением скорости движения при той же нагрузке. Например, относительные погрешности, соответствующие скоростям 0,3, 0,6 и 0,9 м/с, составляют 0,16%, 0,66% и 3,87% в указанном порядке, когда груз пуст. При той же скорости движения относительная погрешность увеличивается с увеличением нагрузки, особенно в условиях большой нагрузки. Колебание относительной погрешности может быть связано с разницей во времени трогания с места и торможения беспилотного транспортного средства, вызванной нагрузкой и скоростью движения на расстоянии 20 м. Хотя существует определенная разница между теоретическим временем и фактическим временем при различных рабочих условиях, относительные погрешности все менее 5%. Эти результаты показывают, что фактическая скорость движения транспортного средства практически соответствует заданной, что свидетельствует об успешном управлении скоростью. Это позволяет легко и точно управлять транспортным средством.

Таблица 3. Результаты теста скоростных характеристик.
3.3.2 Тест отслеживания пути
Беспилотный автомобиль был загружен 50, 100 и 150 кг и работал с постоянной скоростью 0,6 м / с для отслеживания пути, а результаты испытаний показаны на рисунке 20. Как видно на рисунке 20 , при различных условиях загрузки фактическая траектория и целевая траектория в основном совпадают, и беспилотный автомобиль может отслеживать целевую траекторию более точно. Наибольшее общее боковое отклонение происходит в рабочей зоне после поворота, что связано с отклонением новой начальной точки от запланированного пути, вызванным поворотом, отклоняющимся на определенное расстояние. К тому времени, когда беспилотный автомобиль определяет предварительное нацеливание после поиска пути, управление ПИД настраивается на отслеживание заданного пути, и ошибка непрерывно уменьшается. Во время движения максимальная ошибка отслеживания пути составила 13,5 см, а среднее значение составило 6,7 см для грузов 50, 100 и 150 кг. Общая ширина колеи беспилотной машины составила 70 см, поэтому общее движение по заданной траектории не отклонялось от заданного пути.

Рисунок 20. Результаты отслеживания пути беспилотных транспортных средств с различной нагрузкой.
Из рисунка 20 можно увидеть, что беспилотное транспортное средство имеет небольшое отклонение и высокую точность отслеживания на пути транспортировки на обоих концах. Отклонение навигации между рядами обработки (т. е. зоной сбора) немного больше; поэтому в ходе эксперимента подсчитывались результаты отклонения пути перемещения по ряду обработки. Метод испытаний был следующим: беспилотное транспортное средство двигалось вдоль рядов обработки по прямой линии с максимальной скоростью 0,3, 0,6 и 0,9 м/с соответственно, устанавливали одну целевую точку каждые 4 м и проходили расстояние 40 м. Каждый набор испытаний повторяли три раза, и регистрировали боковое отклонение, продольное отклонение и стандартное отклонение беспилотного транспортного средства, прибывающего в каждую статистическую точку. Боковое отклонение было положительным, когда фактическое положение беспилотного транспортного средства находилось слева от целевой точки и отрицательным, когда оно находилось справа. Продольное отклонение было положительным, когда беспилотное транспортное средство находилось перед целевой точкой и отрицательным, когда оно находилось позади целевой точки. Результаты представлены в таблице 4 .

Таблица 4. Отклонение позиционирования.
Из Таблицы 4 видно, что максимальное отклонение позиционирования беспилотных транспортных средств на разных скоростях приходится на контрольную точку 1, при этом максимальное продольное отклонение составляет 9,5 см, а максимальное боковое отклонение – 6,7 см. Продольное отклонение больше бокового. После второй контрольной точки как боковое, так и продольное отклонение значительно уменьшаются. С увеличением расстояния отклонение постепенно уменьшается. Среднее значение бокового отклонения составляет менее 5 см. Такая высокая точность позиционирования позволяет гарантировать движение беспилотного транспортного средства по заданной траектории.
3.4. Проверка полевых испытаний
В октябре 2024 года валидационные испытания были проведены в теплице непрерывного действия в Гули, городе Нанкин, провинция Цзянсу, Китай. В качестве модельной культуры для посадки использовался томат. Длина емкостей для выращивания составляла 40 м, ширина проезжей части для техники составляла 0,9 м, а дорожное покрытие – цементобетонное. Опытный участок показан на рисунке 21 .

Рисунок 21. Полевые испытания беспилотного транспортного средства.
Результаты испытаний скорости по прямой показали, что скорость транспортера составила 0 ~ 1,2 км / ч. Испытание на повороте показало, что транспортер может реализовать дифференциальное рулевое управление in situ как на бетонной, так и на вязкой грунтовой поверхности. Теоретическое и фактическое время составили 3,2% при движении с полной нагрузкой (150 кг). Результаты проверочных испытаний показаны на рисунке 22. Продольное отклонение положения составило 5,7 см, а боковое отклонение - 4,83 см. Было проведено испытание времени запаса хода транспортера, и результаты показали, что время запаса хода транспортера составило 3,93 ч. Из результатов полевых испытаний видно, что скорость движения, минимальный радиус поворота, механизм разгрузки и продольное / боковое отклонение беспилотного транспортера могут соответствовать требованиям беспилотной транспортной операции в тепличной среде. Таким образом, показано, что принятая в данном исследовании схема совмещения лидара и инерциального наведения может позволить беспилотному аппарату сохранять высокую точность локализации и навигации в такой сложной среде, как теплица.
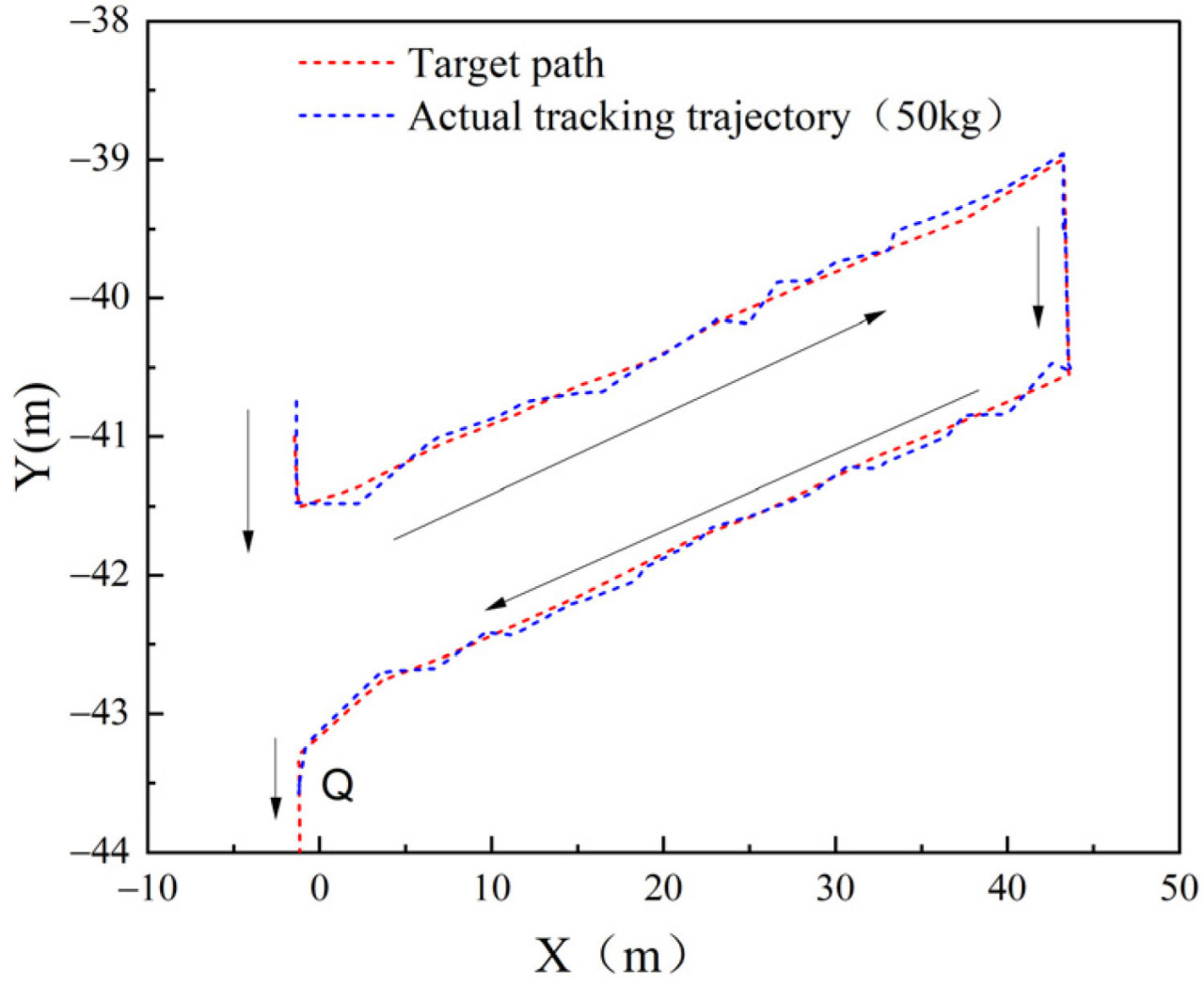
Рисунок 22. Траектория полевых испытаний беспилотного транспортного средства.
3.5 Обсуждение
Автономная работа сельскохозяйственной техники требует высокой точности восприятия. Многие учёные исследовали различные модели слияния для повышения производительности сельскохозяйственной техники.
Как показано в Таблице 5 , спутниковые системы позиционирования, такие как GPS и BDS, обеспечивают точное абсолютное позиционирование для беспилотных сельскохозяйственных транспортных средств или сельскохозяйственных роботов с ошибками позиционирования в пределах 2,5 см [ 32 , 33 ]. Чжан и др. [ 34 ] сосредоточили свои исследования на рисовой рассадопосадочной машине от Kubota, используя систему кинематического глобального позиционирования в реальном времени (RTK-GPS) и технологию электронного компаса для точного позиционирования. Их работа достигла автоматического управления рассадопосадочной машиной как по криволинейным, так и по прямым траекториям, с максимальным зарегистрированным боковым отклонением менее 8,7 см, когда рассадопосадочная машина двигалась со скоростью 0,33 м/с. Сюн [ 35 ] использовал метод позиционирования RTK-BDS на основе спутниковой навигационной системы Beidou для реализации автоматической навигации и операции распыления аппликатора пестицидов для сада. Тем временем, Лю и др. [ 36 ] интегрировали технологию RTK-GNSS в автоматическую навигационную систему опрыскивателя ZP9500, проведя комплексные испытания в различных условиях, включая цементные поля, сухие поля и рисовые поля. В особенно сложных условиях эксплуатации рисового поля система продемонстрировала максимальное боковое отклонение 17,5 см, продемонстрировав устойчивость и адаптивность технологии в сложных сельскохозяйственных условиях.
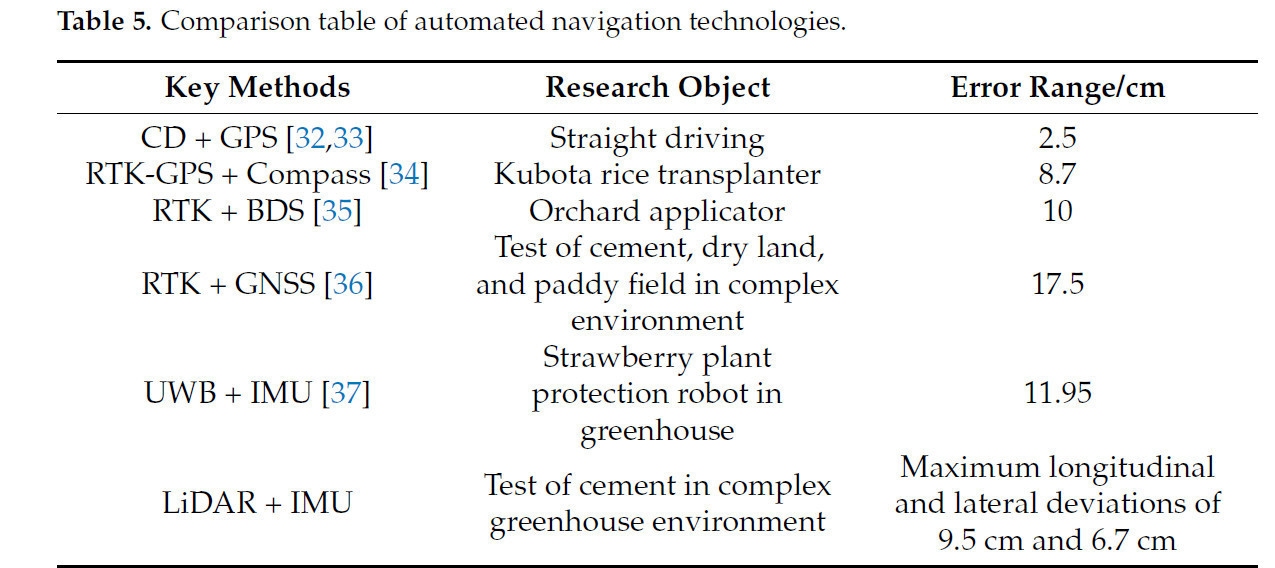
Таблица 5. Сравнительная таблица технологий автоматизированной навигации.
Видно, что текущий уровень технологии автопилота трактора с John Deere и другими гигантами сельскохозяйственной техники достиг уровня приложения. Однако в сложной рабочей среде высокоточные технологии позиционирования и навигации все еще сталкиваются с серьезными проблемами. В частности, в тепличной среде высокоточные технологии позиционирования все еще не освоены из-за таких факторов, как влияние затенения и экологические ограничения. Би и др. [ 37 ] предложили метод, основанный на коррекции значения дальности UWB, для достижения локализации слияния IMU-UWB и экспериментально получили ошибку локализации робота по защите растений клубники в теплице как 11,95 см. В этом исследовании представлена оптимизированная для графа, тесно связанная лазерная и инерциальная система SLAM, слияние данных LIDAR-IMU для улучшенной навигации объекта, достигающее максимальных отклонений 9,5 см и 6,7 см.
4. Выводы
Учитывая трудоёмкость выращивания паслёновых овощей, в данном исследовании представлено электрическое беспилотное транспортное средство, разработанное с учётом энергоэффективности и экологичности. Оно отличается лёгкой, компактной конструкцией и может автономно двигаться, останавливаться, поворачивать и разгружаться по заданному маршруту, отвечая требованиям к производительности и запасу хода электрического шасси.
Для решения проблем, связанных со сложностью парникового эффекта, большими ошибками позиционирования и низкой точностью навигации беспилотных транспортных средств, используется система SLAM, основанная на объединении алгоритмов LiDAR и инерциальной навигации, а также алгоритмов A*, обеспечивающих высокоточное позиционирование и отслеживание траектории беспилотных транспортных средств.
Транспортные испытания показывают, что относительная погрешность времени движения увеличивается с увеличением скорости при постоянной нагрузке и при нагрузке с постоянной скоростью, особенно при больших нагрузках. Несмотря на расхождения теоретических и фактических значений времени, относительная погрешность остаётся менее 5%, что свидетельствует о точном соблюдении заданной скорости. Беспилотный автомобиль точно следует заданной траектории с максимальной погрешностью слежения 13,5 см и средней 6,7 см. Наибольшая погрешность позиционирования наблюдается в начальной точке испытания 1 с максимальным продольным и боковым отклонением 9,5 см и 6,7 см соответственно, при среднем значении бокового отклонения менее 5 см в других точках, что подтверждает высокую точность позиционирования.
Полевые испытания подтверждают, что скорость передвижения, радиус поворота, механизм разгрузки и отклонения соответствуют требованиям к транспортировке в теплицах. Сочетание лидара и инерциальной системы наведения обеспечивает высокую точность позиционирования и навигации в сложных условиях теплицы.
Ссылки
1. Chen, Y.S. Development of Vegetable Mechanization in China from 2022 to 2023. China Veg. 2023, 10, 5–10. [Google Scholar]
2. Wu, W.; Wang, J.; Yang, Y.; Li, D.; Li, X.; Yan, R. Analysis of the development status and mechanization trends of economic crop industry in China. J. Chin. Agric. Mech. 2024, 45, 1–13. [Google Scholar] [CrossRef]
3. Jin, Y.; Xiao, H.; Cao, G. Research on status and evaluation methods of leafy vegetable mechanization production level in China. J. Chin. Agric. Mech. 2020, 41, 196–201. [Google Scholar]
4. Qi, F.; Li, K.; Li, S.; He, F.; Zhou, X. Development of intelligent equipment for protected horticulture in world and enlightenment to China. Trans. Chin. Soc. Agric. Eng. 2019, 35, 183–195. [Google Scholar]
5. Veeck, G.; Veeck, A.; Yu, H. Challenges of agriculture and food systems issues in China and the United States. Geogr. Sustain. 2020, 1, 109–117. [Google Scholar] [CrossRef]
6. Wang, X.; Lu, W.; Chen, M.; Wang, T. Automatic Following System for Greenhouse Harvesting Transportation Based on Adaptive Pure Pursuit Model. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2016, 47, 8–13. [Google Scholar]
7. Zou, F.; Li, J.; He, X.; Ji, M.; Yang, X. Design and experiment of self-propelled water body restoration plants harvester. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2016, 47, 61–66, 82. [Google Scholar]
8. Xiong, J.; Li, Z.; Lin, G.; Wu, S.; Lin, D.; Li, Q.; Xiao, W. Research on AGV simulation system based on interactive control. J. Syst. Simul. 2021, 33, 657–668. [Google Scholar]
9. Cui, Z.; Guan, C.; Chen, Y.; Gao, Q.; Yang, Y. Design of small multi-functional electric crawler platform for greenhouse. Trans. Chin. Soc. Agric. Eng 2019, 35, 48–57. [Google Scholar]
10. de Araujo Zanella, A.R.; da Silva, E.; Albini, L.C.P. Security challenges to smart agriculture: Current state, key issues, and future directions. Array 2020, 8, 100048. [Google Scholar] [CrossRef]
11. Quy, V.K.; Hau, N.V.; Anh, D.V.; Quy, N.M.; Ban, N.T.; Lanza, S.; Randazzo, G.; Muzirafuti, A. IoT-enabled smart agriculture: Architecture, applications, and challenges. Appl. Sci. 2022, 12, 3396. [Google Scholar] [CrossRef]
12. Luo, X.; Liao, J.; Hu, L.; Zhou, Z.; Zhang, Z.; Zang, Y.; Wang, P.; He, J. Research progress of intelligent agricultural machinery and practice of unmanned farm in China. CABI Digit. Libr. 2021, 42, 8–17. [Google Scholar]
13. Boursianis, A.D.; Papadopoulou, M.S.; Diamantoulakis, P.; Liopa-Tsakalidi, A.; Barouchas, P.; Salahas, G.; Karagiannidis, G.; Wan, S.; Goudos, S.K. Internet of things (IoT) and agricultural unmanned aerial vehicles (UAVs) in smart farming: A comprehensive review. Internet Things 2022, 18, 100187. [Google Scholar] [CrossRef]
14. LI Daoliang, L. System analysis and development prospect of unmanned farming. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2020, 51, 1–12. [Google Scholar]
15. Nguyen, N.T.A.; Pham, C.C.; Lin, W.-C. Development of a line following autonomous spraying vehicle with Machine vision-based leaf density estimation for cherry tomato greenhouses. Comput. Electron. Agric. 2023, 215, 108429. [Google Scholar] [CrossRef]
16. Li, T.; Wu, Z.; Lian, X.; Hou, J.; Shi, G.; Qi, W. Navigation line detection for greenhouse carrier vehicle based on fixed direction camera. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2018, 49, 8–13. [Google Scholar]
17. Liu, K.; Yu, J.; Huang, Z.; Liu, L.; Shi, Y. Autonomous navigation system for greenhouse tomato picking robots based on laser SLAM. Alex. Eng. J. 2024, 100, 208–219. [Google Scholar] [CrossRef]
18. Shan, T.; Englot, B.; Ratti, C.; Rus, D. Lvi-sam: Tightly-coupled lidar-visual-inertial odometry via smoothing and mapping. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 5692–5698. [Google Scholar]
19. Sihotang, J. Analysis of shortest path determination by utilizing breadth first search algorithm. J. Info Sains Inform. Sains 2020, 10, 1–5. [Google Scholar] [CrossRef]
20. Hao, L.; Wang, Y.; Bai, Y.; Zhou, Q. Energy management strategy on a parallel mild hybrid electric vehicle based on breadth first search algorithm. Energy Convers. Manag. 2021, 243, 114408. [Google Scholar] [CrossRef]
21. Wang, Z.; Liu, G. Improved LeGO-LOAM method based on outlier points elimination. Measurement 2023, 214, 112767. [Google Scholar] [CrossRef]
22. Huaman, R.; Gonzalez, C.; Prado, S. Performance evaluation of the ROS navigation stack using LeGO-LOAM. In Proceedings of the 9th Brazilian Technology Symposium (BTSym’23); Springer: Cham, Switzerland, 2024; pp. 173–183. [Google Scholar]
23. Sodhi, P.; Choudhury, S.; Mangelson, J.G.; Kaess, M. ICS: Incremental constrained smoothing for state estimation. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 279–285. [Google Scholar]
24. Bavi, O.; Hosseininia, M.; Heydari, M.; Bavi, N. SARS-CoV-2 rate of spread in and across tissue, groundwater and soil: A meshless algorithm for the fractional diffusion equation. Eng. Anal. Bound. Elem. 2022, 138, 108–117. [Google Scholar] [CrossRef]
25. Tang, G.; Tang, C.; Claramunt, C.; Hu, X.; Zhou, P. Geometric A-star algorithm: An improved A-star algorithm for AGV path planning in a port environment. IEEE Access 2021, 9, 59196–59210. [Google Scholar] [CrossRef]
26. Marin-Plaza, P.; Hussein, A.; Martin, D.; Escalera, A.D.L. Global and local path planning study in a ROS-based research platform for autonomous vehicles. J. Adv. Transp. 2018, 2018, 6392697. [Google Scholar] [CrossRef]
27. Wang, Y.; Fu, C.; Huang, R.; Tong, K.; He, Y.; Xu, L. Path planning for mobile robots in greenhouse orchards based on improved A* and fuzzy DWA algorithms. Comput. Electron. Agric. 2024, 227, 109598. [Google Scholar] [CrossRef]
28. Zhao, Y.; Wang, J.; Cao, G.; Yuan, Y.; Yao, X.; Qi, L. Intelligent control of multilegged robot smooth motion: A review. IEEE Access 2023, 11, 86645–86685. [Google Scholar] [CrossRef]
29. Spong, M.W.; Hutchinson, S.; Vidyasagar, M. Robot Modeling and Control; John Wiley & Sons: Hoboken, NJ, USA, 2020. [Google Scholar]
30. Su, Y.; Wang, T.; Shao, S.; Yao, C.; Wang, Z. GR-LOAM: LiDAR-based sensor fusion SLAM for ground robots on complex terrain. Robot. Auton. Syst. 2021, 140, 103759. [Google Scholar] [CrossRef]
31. Yang, L.; Ma, H.; Nie, Z.; Zhang, H.; Wang, Z.; Wang, C. 3D LiDAR point cloud registration based on IMU preintegration in coal mine roadways. Sensors 2023, 23, 3473. [Google Scholar] [CrossRef] [PubMed]
32. Yao, Z.; Zhao, C.; Zhang, T. Agricultural machinery automatic navigation technology. iScience 2024, 27, 108714. [Google Scholar] [CrossRef] [PubMed]
33. Li, M.; Imou, K.; Wakabayashi, K.; Yokoyama, S. Review of research on agricultural vehicle autonomous guidance. Int. J. Agric. Biol. Eng. 2009, 2, 1–16. [Google Scholar]
34. Zhang, Z.G.; Luo, X.W.; Zhou, Z.Y.; Zang, Y. Design of GPS Navigation Control System for Rice Transplanter. Trans. Chin. Soc. Agric. Mach. 2006, 37, 95–97. [Google Scholar]
35. Xiong, B.; Zhang, J.X.; Qu, F.; Fan, Z.Q.; Wang, D.S.; Li, W. Navigation control system for orchard spraying machine based on Beidou navigation satellite system. Trans. Chin. Soc. Agric. Mach. 2017, 48, 45–50. [Google Scholar]
36. Liu, Z.P.; Zhang, Z.G.; Luo, X.W.; Wang, H.; Huang, P.K.; Zhang, J. Design of automatic navigation operation system for Lovol ZP9500 high clearance boom sprayer based on GNSS. Trans. Chin. Soc. Agric. Eng. 2018, 34, 15–21. [Google Scholar]
37. Bi, S.; Zhang, G.; Li, Z.; Hu, F. Positioning Method of Greenhouse Plant Protection Robot Based on Distance Measurement Value Correction. Trans. Chin. Soc. Agric. Mach. 2023, 54, 347–358. [Google Scholar]

Guan C, Zhao W, Xu B, Cui Z, Yang Y, Gong Y. Design and Experiment of Electric Uncrewed Transport Vehicle for Solanaceous Vegetables in Greenhouse. Agriculture. 2025; 15(2):118. https://doi.org/10.3390/agriculture15020118
Перевод статьи «Design and Experiment of Electric Uncrewed Transport Vehicle for Solanaceous Vegetables in Greenhouse» авторов Guan C, Zhao W, Xu B, Cui Z, Yang Y, Gong Y., оригинал доступен по ссылке. Лицензия: CC BY. Изменения: переведено на русский язык



















































































































Комментарии (0)