Метод выявления павших бройлеров с помощью видеоанализа и отслеживания их перемещений
Наличие павших бройлеров в стаде может служить значительным фактором передачи заболеваний и негативно сказываться на общем благополучии оставшихся птиц. В данном исследовании представлен метод обнаружения павших бройлеров, основанный на том факте, что мертвые особи остаются неподвижными в стаде на видеозаписях. Идентификация павших птиц осуществлялась путем анализа информации об их перемещении в течение всего видео.
Аннотация
Во-первых, для захвата ключевых кадров в видео использовался метод разностных кадров. Затем была разработана усовершенствованная сегментационная сеть YOLOv8-SP для получения координат маски каждого бройлера, а также применен метод оценки оптического потока для генерации карт оптического потока и оценки их движения. Для оценки уровня движения каждого бройлера в каждом ключевом кадре был определен и рассчитан индекс средней интенсивности оптического потока (AOFI). С помощью порогового значения AOFI бройлеры на ключевых кадрах были классифицированы как потенциально павшие и активные живые особи. В конечном счете, идентификация павших бройлеров была достигнута путем анализа частоты, с которой каждая особь определялась как потенциально павшая на всех ключевых кадрах видео.
В основную сеть был интегрирован параллельный модуль внимания с учетом патчей (PPA), афункция расчета перекрытия (overlaps) была улучшена с использованием пользовательской степенной функции преобразования (PT). Показатели mAP для рамок (box) и сегментации масок (mask) модели YOLOv8-SP увеличились на 1,9% и 1,8% соответственно. Производительность модели при распознавании мелких и частично загороженных целей была эффективно улучшена. Ошибочные и пропущенные обнаружения павших бройлеров произошли в 4 из 30 тестовых видеозаписей, а точность алгоритма идентификации падежа бройлеров, предложенного в данном исследовании, составила 86,7%.
1. Введение
Значимость птицеводческой отрасли в глобальной пищевой цепочке возросла экспоненциально, обеспечивая жизненно важный источник питания и белка для растущего человечества. Это во многом обусловлено их ускоренным циклом роста и более эффективной конверсией корма по сравнению с крупным рогатым скотом. В то же время восприятие потребителями продукции птицеводства формируется под влиянием множества факторов, таких как осведомленность о здоровье, качество и безопасность продукции, а также этические аспекты благополучия животных [1,2]. «Падеж на ферме», под которым понимается неконтролируемая гибель животных в условиях фермы, является ключевым показателем благополучия бройлеров. Высокие показатели падежа не только сигнализируют о плохом управлении окружающей средой и стратегиях профилактики заболеваний, но и отражают нарушенное состояние благополучия бройлеров. В частности, снижение падежа за счет улучшенных методов управления и мониторинга здоровья может значительно улучшить общее благополучие бройлеров.
Смертность среди бройлеров на птицефабриках в основном обусловлена двумя ключевыми факторами: стрессом и болезнями. Стрессовые условия могут возникать из-за генетической предрасположенности и факторов стресса окружающей среды, включая колебания температуры, скученность, отсутствие обогащения среды и плохое качество воздуха, а также из-за разрушительного воздействия присутствия человека [3]. В то же время спектр заболеваний, включая хромоту, сердечно-сосудистые проблемы, асцит, респираторные инфекции и повсеместный риск птичьего гриппа, также способствует смертности бройлеров [4]. Разложение павших бройлеров на ферме приводит к выделению вредных газов, которые не только ухудшают благополучие живых бройлеров, но и служат катализатором передачи заболеваний, тем самым усиливая цикл смертности. Таким образом, крайне важно внедрять эффективные протоколы выявления и удаления павших бройлеров для снижения этих рисков и улучшения общего благополучия и управления поголовьем.
Идентификация павших бройлеров традиционно осуществлялась путем визуального наблюдения, что является весьма трудоемким и затратным по времени методом. Этот метод подвергает работников рискам для здоровья и безопасности, особенно на крупных птицефабриках. Появление точного животноводства (PLF) в сочетании с растущим дефицитом рабочей силы в птицеводстве подчеркнуло настоятельную необходимость в автоматизированных системах для успешного мониторинга и управления здоровьем птицы. В ответ на эту потребность исследователи предложили различные методы, включая технологию машинного зрения, акустического восприятия и акселерометров, для выявления павшей или больной птицы в стаде.
Технология машинного зрения, характеризующаяся низкой инвазивностью, высокой эффективностью и низкой стоимостью, широко используется в задачах восприятия информации о птице, включая обнаружение заболеваний и падежа. На ранних этапах основным методом выявления больной птицы были методы обработки изображений, основанные на изменениях их физического внешнего вида и поведенческих паттернов. Исследователи извлекали и анализировали геометрические признаки формы и признаки движения птицы с изображений, классифицируя их с помощью алгоритмов классификации для идентификации больной птицы [5,6]. С внедрением технологии глубокого обучения в сельскохозяйственную сферу исследователи начали комбинировать глубокое обучение и технологию обработки изображений для решения проблемы идентификации здоровья птицы в сложных сценариях, поскольку глубокое обучение продемонстрировало большие возможности в извлечении признаков и распознавании объектов [7]. Aydin и др. [8] извлекли и проанализировали взаимосвязь между такими особенностями походки бройлеров, как скорость, длина шага и частота шагов, во время ходьбы и степенью хромоты, используя методы обработки изображений. Результаты показали, что существует важная взаимосвязь между извлеченными признаками и хромотой бройлеров. Sadeghi и др. [9] извлекли статистические признаки из тепловизионных изображений бройлеров, достигнув точности 97,2% и 100% с использованием алгоритма SVM для классификации бройлеров с птичьим гриппом и болезнью Ньюкасла. Vandana и др. [10] построили модель классификации аномального помета кур на основе сети EfficientNetB7, тем самым идентифицируя такие заболевания, как сальмонеллез, болезнь Ньюкасла и кокцидиоз. В упомянутых исследованиях по идентификации больной птицы на основе зрения исследователи часто выявляют заболевания птицы путем извлечения динамических или статических признаков. Однако при идентификации павшей птицы используются только статические признаки птицы [11,12].
Акустическое восприятие также считается перспективной технологией с низкой инвазивностью и стоимостью. Исследователи использовали технологию звуковых датчиков и CNN для идентификации аномальных звуков, издаваемых птицей, тем самым успешно осуществляя мониторинг заболеваний с помощью методов классификации [13,14]. Cuan и др. [15] использовали двунаправленную модель долгой краткосрочной памяти (BiLSTM) для анализа аудиопризнаков, извлеченных из вокализации птиц, с целью идентификации болезни Ньюкасла. Bhandekar и др. [16] обработали записанные голоса кур методом мел-частотных кепстральных коэффициентов и классифицировали их с помощью модели SVM для обнаружения аномальных кур. В обоих отчетах была достигнута хорошая производительность в идентификации больных кур. Однако, похоже, что технология акустического восприятия была неэффективна для обнаружения павшей птицы, так как павшая птица не издает аномальных звуков.
Технология акселерометров в основном использовалась в исследованиях поведения и идентификации здоровья крупного скота (свиней, коров, овец и т.д.). Из-за экономических и практических соображений она реже применялась в исследовании поведения птицы и обнаружения заболеваний. Mei и др. [17] использовали трехмерные данные об ускорении, собранные с помощью носимых акселерометров, для идентификации бройлеров, отравленных афлатоксином. Bao и др. [18] прикрепили к каждой курице ножные кольца с датчиками для автоматического сбора трехмерных данных об ускорении и перемещении бройлеров. Метод достиг точности 100% в обнаружении павших кур. Однако из-за экономических затрат технология носимых датчиков оставалась в основном ограниченной лабораторной стадией и не казалась перспективной для практического применения на коммерческих фермах.
Методы идентификации павших бройлеров на основе машинного зрения имеют преимущества низкой стоимости и меньшей инвазивности для стада птицы. Однако в области идентификации павшей птицы визуальные методы в основном сосредоточены на распознавании павшей птицы путем определения морфологических признаков птицы, то есть статических признаков. Не было сообщений об исследованиях, сочетающих машинное зрение с информацией о движении бройлеров для идентификации павших бройлеров. Оценка оптического потока захватывает информацию о движении объектов в сцене путем анализа смещения пикселей на изображении с течением времени [19]. Это очень перспективно для идентификации движений тела бройлеров в стаде [20]. Следовательно, цель данного исследования — предложить метод идентификации павших бройлеров на основе видео и исторической информации о движении, имитирующий ручное наблюдение за движением бройлера для определения павших особей в стаде. Мы анализируем состояние движения каждого бройлера в видео для достижения идентификации павших бройлеров.
2. Материалы и методы
2.1. Сбор видео
Работа по сбору видео бройлеров проводилась с 17 ноября по 14 декабря 2023 года на коммерческой бройлерной ферме в Яньтае, провинция Шаньдун, Китай. В птичниках фермы содержалось в среднем 14 000 белых бройлеров, причем в каждой клетке находилось от 60 до 70 особей, с лампой накаливания и 2 кормушками. Самцы и самки бройлеров содержались совместно в клетках. Для записи видео промышленная камера (HIKROBOT China Inc., MV-CA023-10UC, Ханчжоу, Китай) была установлена на штатив для съемки снаружи клетки. Камера была подключена к портативному компьютеру, что позволяло записывать RGB-видео со скоростью 32 кадра в секунду. Время экспозиции камеры регулировалось вручную в соответствии с различной интенсивностью освещения в разных клетках. Сбор видео был сосредоточен на периоде с 15-го по 41-й день цикла роста бройлеров. Всего было записано 98 видеороликов, содержащих павших бройлеров, продолжительностью от 1 до 2,5 минут, и более 200 видеороликов без павших бройлеров.
2.2. Общий технический маршрут
Целью данного исследования было использование видеометода для идентификации павших бройлеров в птичьих стадах. Схема предложенного метода изображена на рисунке 1. Сначала из видео бройлеров с помощью метода межкадрового максимума извлекались ключевые кадры. Затем мы использовали пороговое значение средней интенсивности оптического потока (AOFI) для оценки движения бройлеров в каждом ключевом кадре и классифицировали бройлеров на активных и кандидатов в павшие. Значение AOFI было определено на основе оценки оптического потока и сегментации маски бройлера. Наконец, мы подсчитали частоту, с которой каждый бройлер определялся как кандидат в павшие на всех ключевых кадрах, и сделали окончательное определение павших бройлеров на основе порогового метода.
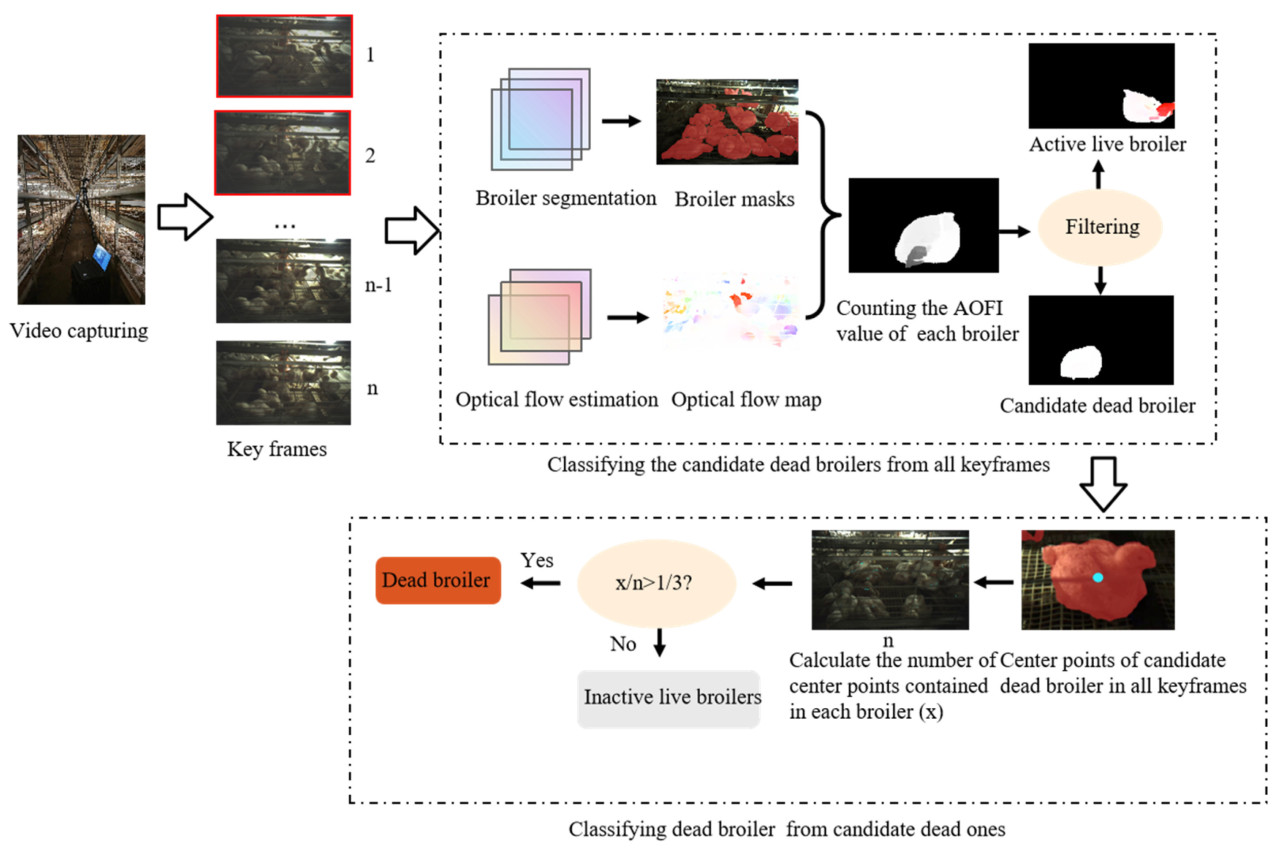
Рисунок 1. Схема алгоритма идентификации павших бройлеров.
2.3. Извлечение ключевых кадров
Видеоданные, собранные с фермы, обычно состоят из многочисленных кадров с низкой дисперсией, которые неэффективны для оценки оптического потока. Это во многом связано с естественным поведением бройлеров, которые отдыхают 70–80% времени [21], и ограниченной активностью, наблюдаемой в клеточном содержании ярусного типа. Ключевые кадры в этом исследовании — это видеокадры, содержащие больше информации о движении бройлеров. Использование ключевых кадров вместо всей видеопоследовательности для идентификации павших бройлеров может значительно снизить вычислительную нагрузку и повысить эффективность процесса идентификации. В этом исследовании кадры со средними межкадровыми различиями, достигающими локального максимума, были определены как ключевые кадры. Для извлечения этих ключевых кадров использовался метод межкадрового максимума. Межкадровая разность, которая рассчитывается как разница в интенсивности пикселей между двумя последовательными кадрами, описывается уравнением (1). Для уменьшения шума и предотвращения избыточного извлечения похожих кадров алгоритм включал метод окна Хэннинга для сглаживания средних значений разностей перед идентификацией локальных максимумов. В результате видео были эффективно сжаты до отобранного набора из 50 до 100 ключевых кадров, которые затем перешли на следующий этап анализа.

где (X, Y) относится к ширине и высоте кадра, f(x, y) представляет значение цвета точки пикселя с координатами (x, y), n — порядковый номер видеокадра, а D — межкадровая разность.
2.4. YOLOv8-SP
YOLOv8-seg — это одноэтапный алгоритм сегментации, предназначенный для промышленного развертывания, отличающийся быстрой скоростью обнаружения и высокой точностью распознавания, а также простотой развертывания и применения. Он основан на базовой сети YOLOv8 и включает голову сегментации, вдохновленную структурой YOLOACT, добавляя специализированную ветвь для сегментации масок. В этом исследовании алгоритм YOLOv8-seg использовался для выполнения сегментации бройлеров. Поскольку видео снимались промышленной камерой, расположенной снаружи клетки, бройлеры на изображениях казались меньше, когда они находились дальше от камеры. Изображения содержали как крупные цели, близкие к камере, так и мелкие цели, находящиеся дальше. Чтобы повысить способность модели распознавать мелкие объекты, в это исследование был введен параллельный модуль внимания с учетом патчей для улучшения способности модели захватывать многоуровневые признаки, тем самым повышая ее способность обнаруживать мелкие цели. Дополнительно, в рамках стратегии назначения меток сети YOLOv8 была разработана пользовательская степенная функция преобразования (PT) для оптимизации матрицы перекрытия. Эта функция направлена на дальнейшее подавление веса рамок прогноза с низкой достоверностью при одновременном усилении влияния высококачественных рамок прогноза на производительность обучения модели. Улучшенный алгоритм сегментации обозначается как YOLOv8-SP.
2.4.1. Параллельный модуль внимания с учетом патчей
Параллельный модуль внимания с учетом патчей (PPA) был впервые предложен в задачах обнаружения мелких объектов в инфракрасном диапазоне [22], где использовалась стратегия параллельных многоканальных ветвей для повышения точности обнаружения мелких объектов. Как показано на рисунке 2, модуль PPA включает три параллельные ветви: локальную, глобальную и ветвь последовательной свертки. Входной тензор признаков F∈R^(H^'×W^'×C) сначала корректировался посредством поточечной свертки для получения F^'∈R^(H^'×W^'×C^' ), а затем обрабатывался через каждую из трех параллельных ветвей для получения трех различных тензоров признаков: F_local∈R^(H^'×W^'×C^' ), F_global∈R^(H^'×W^'×C^' ) и F_conv∈R^(H^'×W^'×C^' ). Наконец, выходы трех ветвей суммировались для получения входа механизмов внимания, F ̃∈R^(H^'×W^'×C^' ). В частности, различающая ветвь управляется параметром размера патча p, который агрегирует и смещает неперекрывающиеся патчи карт признаков в пространственных измерениях и вычисляет матрицу внимания между неперекрывающимися патчами, чтобы обеспечить извлечение и взаимодействие локальных и глобальных признаков. В модуле механизма внимания тензор признаков последовательно обрабатывался через одномерную карту внимания признаков и двумерную карту внимания признаков для получения окончательного выхода. Процесс можно обобщить как уравнения (2) и (3):

где ⊗ — поэлементное умножение, F_c и F_s — тензор признаков после канального и пространственного отбора соответственно, δ(⋅) и β(⋅) — операции выпрямленного линейного блока и пакетной нормализации соответственно, а F^″ — окончательный выход.
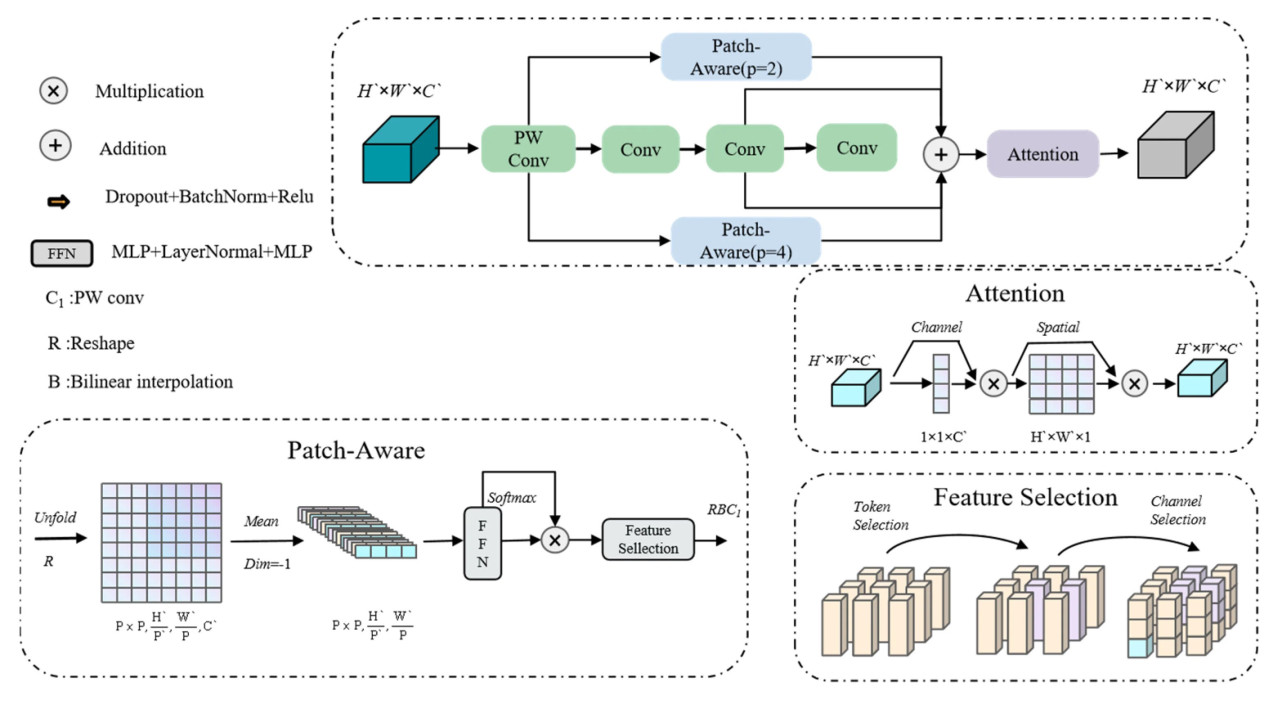
Рисунок 2. Структура сети параллельного модуля внимания с учетом патчей.
На рисунке 3 показана архитектура модуля C2f_PPA. Чтобы повысить способность модели извлекать информацию изображения, модуль PPA использовался для замены узкого места внутри модуля C2f. Следовательно, все слои C2f (2, 4, 6 и 8) в базовой сети были заменены модулем C2f_PPA.
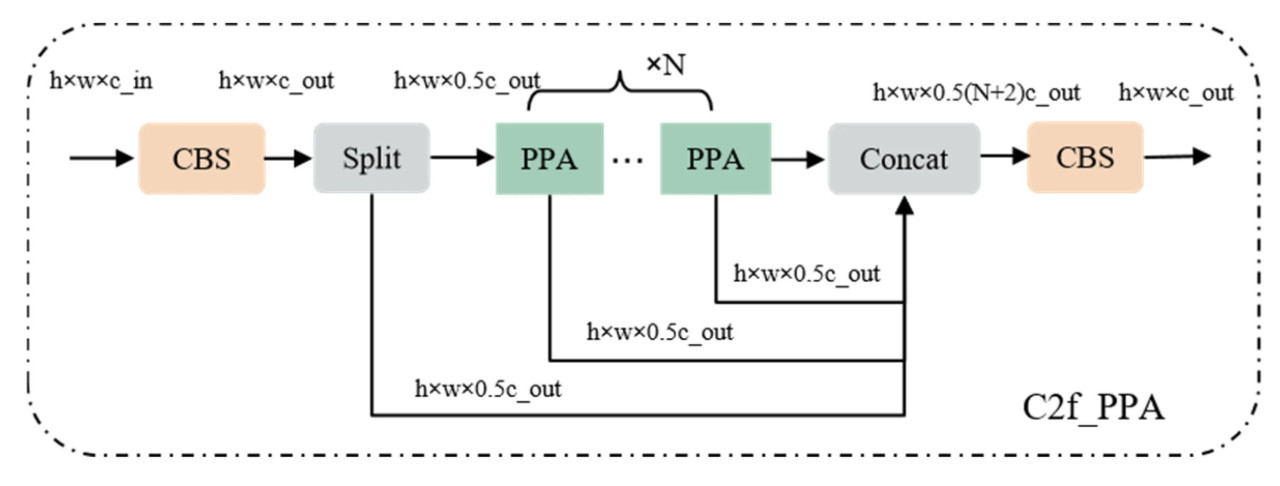
Рисунок 3. Схема модуля C2f_PPA.
2.4.2. Степенное преобразование
Техника обучения выравниванию задач (TAL), предложенная в TOOD [23], — это метод распределения положительных и отрицательных образцов. Она достигает явного выравнивания между двумя задачами путем разработки стратегии распределения образцов и функции потерь на выравнивание задач, что приближает оптимальные якоря обеих задач друг к другу. Стратегия распределения образцов вводит идею подавления оценок классификации невыровненных якорей, одновременно направляя сеть на точное улучшение классификации выровненных якорей. Основываясь на этой идее, исследователи предложили метрику выравнивания якорей для оценки выравнивания задач на уровне якорей, которая использовалась для динамической оптимизации прогнозов для каждого якоря. В сети YOLOv8 концепция TAL применяется для выравнивания задач классификации и регрессии. В RTMDet [24], в ответ на трудность различения высококачественных и низкокачественных сопоставлений при использовании обобщенного IoU в качестве стоимости сопоставления, авторы ввели идею использования логарифма IoU в качестве стоимости регрессии со следующим выражением:

Вдохновленные этим, чтобы сделать качество сопоставления и веса потерь для различных пар прогноз-GT более различимыми, мы оптимизировали функцию расчета перекрытия (overlaps) в процессе вычисления метрики выравнивания с использованием пользовательской степенной функции преобразования (PT). Эта функция могла бы дальнейшее усилить вес высококачественных прогнозируемых рамок, одновременно подавляя влияние рамок низкого качества. Функция выражается следующим образом:

где T — пользовательский порог IoU.
2.5. Оценка оптического потока
Оценка оптического потока описывает движение точек пикселей в последовательности изображений и может предоставлять информацию, такую как траектории движения и скорости объектов. В видео бройлеров активность бройлеров за определенный период времени может быть оценена с помощью оценки оптического потока серии ключевых кадров. Традиционные методы оценки оптического потока хорошо работают в простых сценах и при обработке малых движений, но не подходят для работы со сложными сценами и крупномасштабными движениями. Различное поведение бройлеров и неравномерное распределение света в клетке создают сложную сцену, требующую более совершенного аналитического подхода.
Сеть оценки оптического потока с рекуррентными адаптируемыми пирамидами с итеративным декодированием (RAPIDFlow) — это эффективная и гибкая сеть оценки оптического потока, которая постепенно генерирует высокодетализированные оценки оптического потока посредством итеративных процессов декодирования и уточнения [25]. Как показано на рисунке 4, архитектура сети оптического потока RAPIDFlow в основном состоит из двух частей: кодировщика и декодера. Часть кодировщика использовала блоки стволовой свертки для проецирования входных изображений в пространство признаков и многократно применяла один рекуррентный блок для генерации многоуровневых признаков. Пирамидальный декодер использовал итеративное уточнение, примененное к пирамидам признаков, для постепенного получения высокодетализированных оценок потока. На последнем уровне пирамиды был добавлен выпуклый модуль повышающей дискретизации для создания более четких полей потока с исходным разрешением. Сеть RAPIDFlow устойчива к входному размеру и эффективна в процессе вывода, что обеспечивает хорошую производительность при обнаружении малодиапазонного движения в ключевых кадрах.
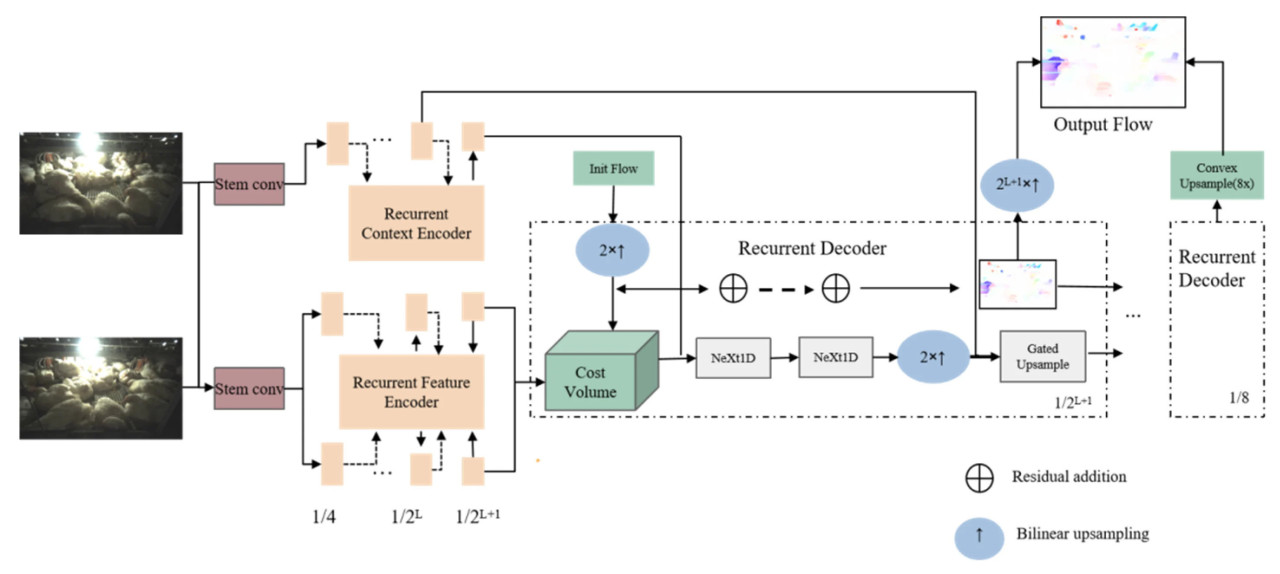
Рисунок 4. Схема сети RAPIDFlow.
2.6. Набор данных и экспериментальная установка
Всего 770 изображений использовались для построения набора данных для сегментации, большинство из которых были получены из видеокадров, не содержащих павших бройлеров, а небольшая часть — из изображений с павшими бройлерами, собранных Hao и др. [26]. С помощью программного обеспечения Labelme (5.6.0) была проведена аннотация каждого из бройлеров, присутствующих на изображениях, причем как павшие, так и живые бройлеры были единообразно помечены в категории «бройлер». Впоследствии набор данных был структурирован в соответствии с форматом COCO и разделен на подмножества для обучения и проверки в соотношении 8:2 соответственно. Метрики оценки, включая точность, полноту и среднюю среднюю точность (mAP), были выбраны для проверки производительности предложенной модели сегментации бройлеров.
Вся тренировочная работа выполнялась на настольном компьютере с GPU GeForce RTX3090 (24 ГБ) и процессором Intel i9-12000k @3,19 ГГц. С точки зрения среды выполнения модель обучалась в системе Ubuntu 20.04 с версией PyTorch 1.13. Входной размер модели сегментации был установлен на 640 × 640 пикселей, а общее количество эпох, размер пакета и оптимизатор составляли 300, 4 и SGD соответственно. Сеть оптического потока не обучалась на пользовательском наборе данных, а использовала предварительно обученные веса, обученные на наборах данных Sintel optical flow.
2.7. Идентификация павших бройлеров
В последовательности видеокадров бройлеры, которые демонстрируют движение, определенно живы и активны, в то время как те, которые не проявляют движения, могут быть либо мертвыми, либо их движение могло быть пропущено видеокадрами. Ключевые кадры в видео содержат множество информации о движении бройлеров, позволяя описать их движение за период с помощью двух соседних ключевых кадров. Поэтому первым шагом было исключение активных бройлеров из ключевых кадров путем оценки их движения, оставив тех, кто не проявлял движения. Для удобства описания последние были определены в данном исследовании как кандидаты в павшие бройлеры.
Чтобы отличить активных бройлеров в ключевых кадрах от кандидатов в павшие, в этом исследовании был определен индекс AOFI бройлеров для количественной оценки их движения в соседних ключевых кадрах. На рисунке 5 показана вычислительная схема индекса AOFI. Первая ветвь получала карты оптического потока соседних ключевых кадров с помощью сети RAPIDFlow, а вторая ветвь использовала сеть инстанс-сегментации для сегментации и извлечения информации о координатах пикселей каждого бройлера в ключевом кадре. В частности, чтобы гарантировать, что значения пикселей на карте оптического потока были пропорциональны уровню движения (т.е. пиксели без изменения движения имели значение 0, и чем интенсивнее движение, тем выше значение), над картой оптического потока выполнялась операция инверсии с последующим извлечением значений серого. Наконец, значение AOFI бройлера рассчитывалось в соответствии с уравнением (6). Был проведен статистический анализ значений AOFI как для павших, так и для активных живых бройлеров, чтобы подтвердить соответствующий порог для обнаружения кандидатов в павшие бройлеры в ключевых кадрах. После этого порог использовался для фильтрации активных живых бройлеров в каждом ключевом кадре, в то время как сохранялись координаты пикселей (маска) кандидатов в павшие бройлеры для дальнейшего анализа.

где N — количество пикселей в маске бройлера, (x, y) — координаты пикселей маски бройлера, а IG — значение серого пикселя (x, y) в инвертированной карте оптического потока.
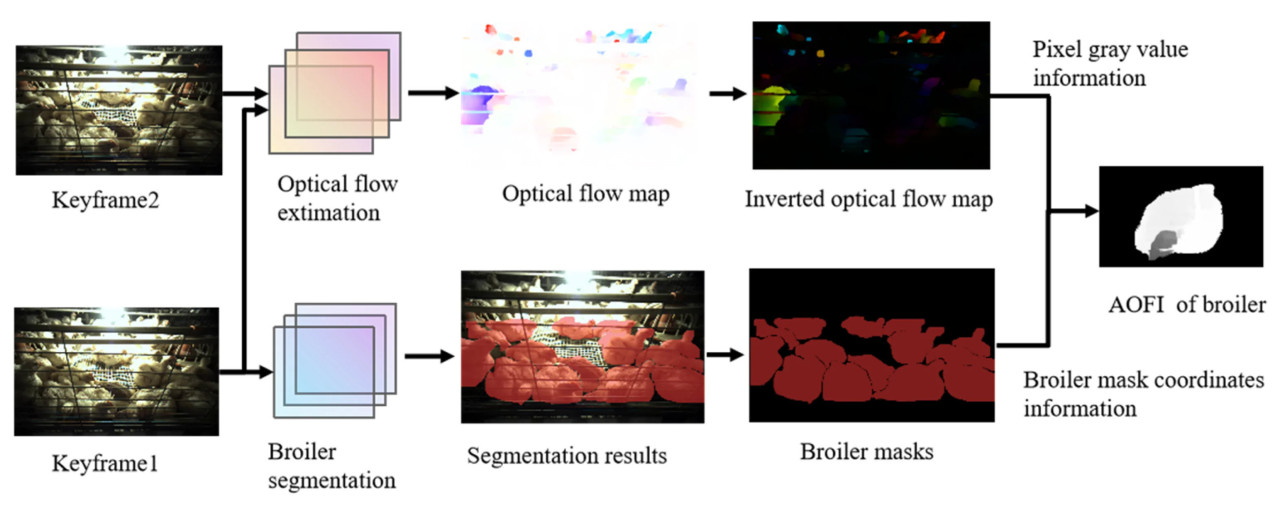
Рисунок 5. Схема расчета средней интенсивности оптического потока (AOFI) бройлера.
Как правило, неактивные живые бройлеры со временем всегда проявляют некоторую степень движения, что приводит к более высокой частоте движения на всех ключевых кадрах видео по сравнению с павшими бройлерами. Можно было оценить историческое движение каждого бройлера на всех ключевых кадрах, чтобы идентифицировать павших бройлеров. Поэтому вторым шагом в идентификации павших бройлеров был подсчет частоты, с которой каждый бройлер определялся как кандидат в павшие на всех ключевых кадрах видео. Чтобы облегчить подсчет кандидатов в павшие бройлеры на всех ключевых кадрах, как показано на рисунке 6а, центральная точка маски бройлера использовалась для представления бройлера, и все точки проецировались на последний ключевой кадр видео, чтобы подсчитать частоту, с которой каждый бройлер был идентифицирован как кандидат в павшие (рисунок 6b). Из-за различного количества ключевых кадров, извлеченных из видеопоследовательностей, в этом исследовании частота, с которой бройлеры идентифицировались как кандидаты в павшие, определялась как количество раз, когда бройлеры оценивались как кандидаты в павшие, деленное на общее количество ключевых кадров. Алгоритм 1 представляет псевдокод для идентификации павших бройлеров в видео.
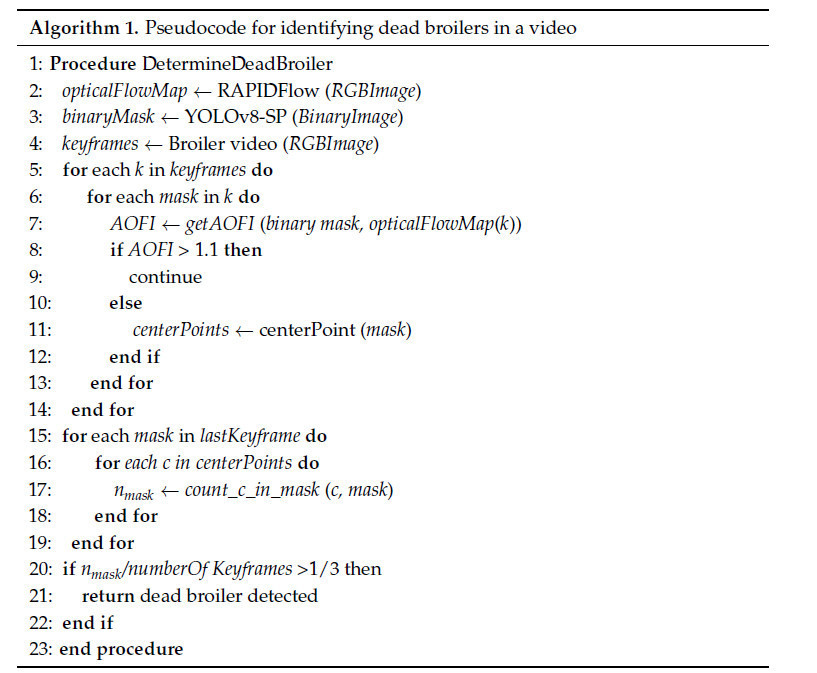
1. Псевдокод для идентификации павших бройлеров в видео
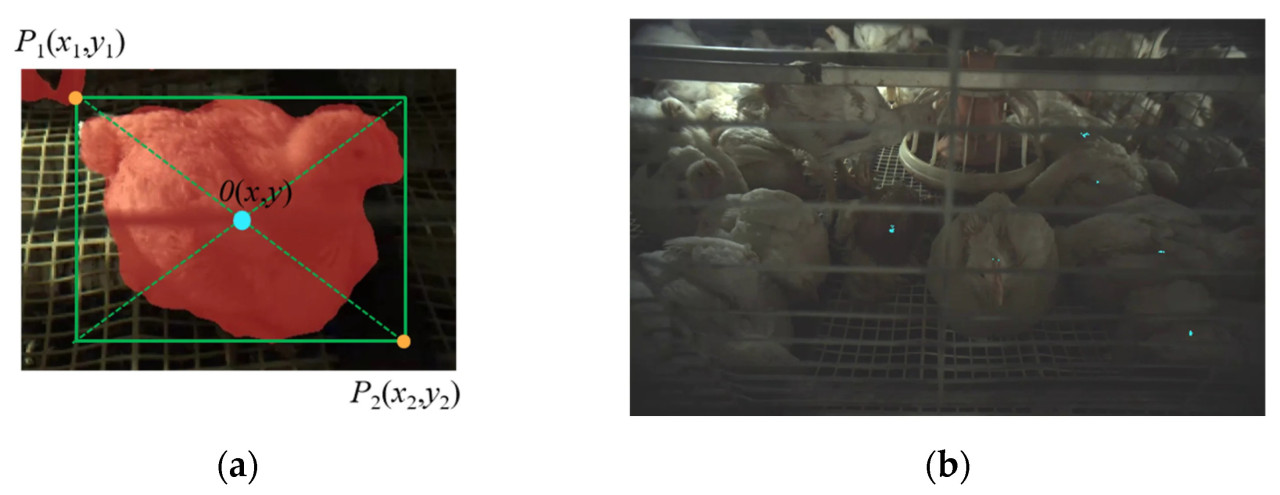
Рисунок 6. Центральные точки бройлеров. (a) Зеленые прямоугольные рамки представляют ограничивающие рамки бройлеров, полученные из модели сегментации бройлеров, где P1(x1, y1) и P2(x2, y2) обозначают координаты верхнего левого и правого нижнего углов прямоугольника соответственно. O(x, y) — центральная точка маски бройлера. (b) Результат проецирования центральных точек кандидатов в павшие бройлеры со всех ключевых кадров на последний ключевой кадр.
3. Результаты
3.1. Сравнение различных моделей
Производительность различных моделей на наборах данных для сегментации бройлеров, созданных в этом исследовании, показана в таблице 1 и на рисунке 7. Чтобы обеспечить справедливое сравнение, ни одна из моделей не использовала предварительно обученные веса во время обучения. Среди всех моделей YOLOv8-SP достигла наивысшей точности обнаружения с mAP 96,1% для рамок и 96,3% для масок. По сравнению с YOLOv8s-seg, YOLOv8-SP улучшила mAP (рамка) и mAP (маска) на 1,9% и 1,8% соответственно, в то время как количество параметров увеличилось только на 13,8%, вычислительные затраты возросли на 4,5%, а скорость вывода снизилась на 36,8 кадров в секунду. Эти увеличения параметров и вычислений считаются приемлемыми. По сравнению с YOLOv8m-seg наша модель улучшила mAP (рамка) и mAP (маска) на 1,2% и 1,0% соответственно, в то время как количество параметров и вычислительные затраты были сокращены примерно на 51% и 58% соответственно, с увеличением скорости вывода на 12,7 кадров в секунду. По сравнению с YOLOv5s-seg, хотя YOLOv8-SP не превосходила по количеству параметров и вычислениям, ее скорость вывода была аналогичной, в то время как mAP (рамка) и mAP (маска) показали значительные улучшения на 1,8% и 2,6% соответственно. По сравнению с двухэтапными моделями, SOLOv2 [27] и Mask R-CNN [28], YOLOv8-SP продемонстрировала существенные улучшения как в точности обнаружения, так и в скорости вывода.
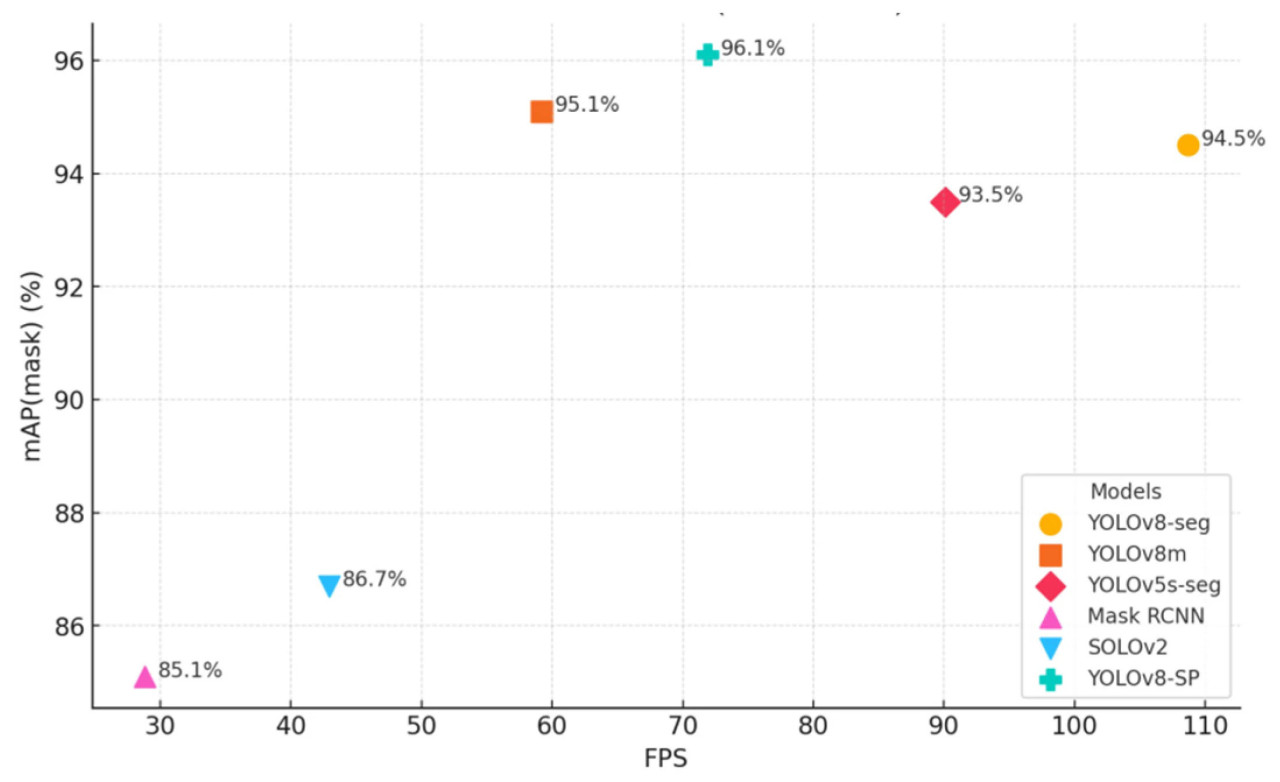
Рисунок 7. Сравнения с другими моделями.
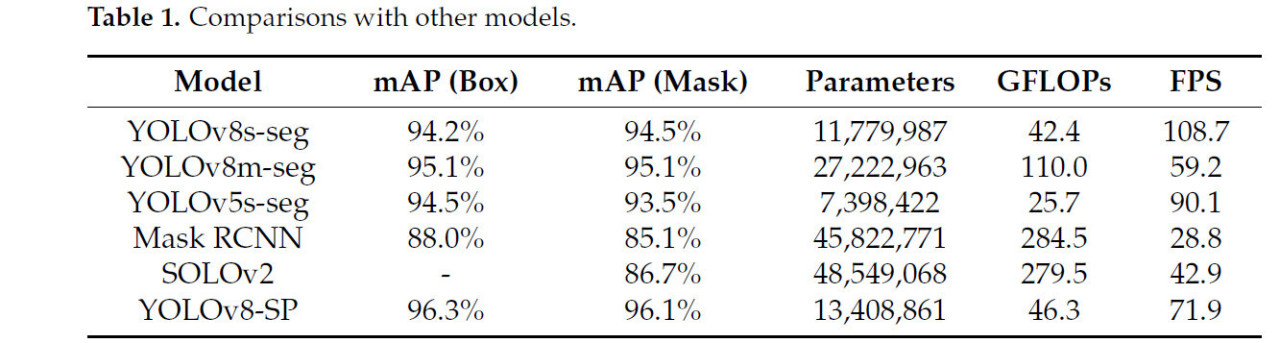
Таблица 1. Сравнения с другими моделями.
3.2. Абляционный тест
В этом исследовании были проведены абляционные эксперименты для проверки эффективности улучшенной модели для различных компонентов. YOLOv8s-seg использовалась в качестве базовой линии для проверки влияния оптимизации различного количества модулей C2f в базовой сети YOLOv8 с помощью модуля PPA на производительность обнаружения модели. Дополнительно проверялось влияние различных порогов IoU в функции PT на точность модели. Как показано в таблице 2, наивысшая точность обнаружения была достигнута, когда все четыре модуля C2f в базовой сети были улучшены с помощью модуля PPA, а порог IoU функции PT был установлен на 0,45. mAP (рамка) и mAP (маска) модели увеличились на 1,9% и 1,8% соответственно, при этом количество параметров и вычислительные затраты увеличились на 13,8% и 4,5% соответственно. По мере увеличения количества модулей C2f_PPA mAP (рамка) и mAP (маска) модели увеличились на 1,0% и 0,7% соответственно, что указывает на то, что использование модуля PPA для улучшения многоуровневых признаков в базовой сети было эффективным. Оптимизация стратегии назначения меток на основе функции PT не только позволила избежать дополнительного увеличения параметров и вычислений, но и, при оптимальном пороге, дальнейшее улучшила mAP (рамка) и mAP (маска) модели на 0,9% и 1,1% соответственно по сравнению с предыдущей конфигурацией.
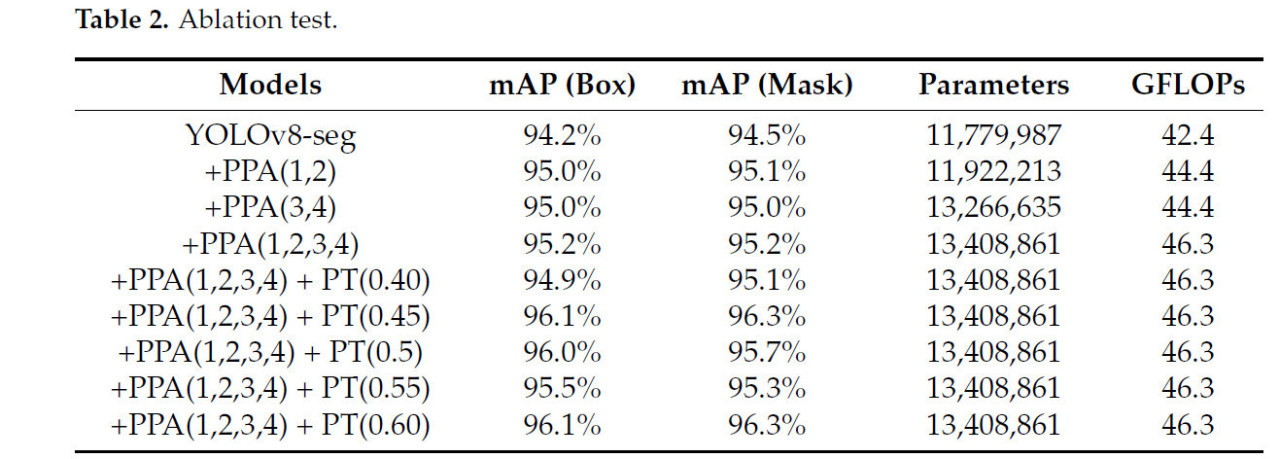
Таблица 2. Абляционный тест.
3.3. Визуализации
Как показано на рисунках 8а,b, красные прямоугольные рамки выделяют двух бройлеров, находящихся на расстоянии от камеры. По сравнению с результатами сегментации модели YOLOv8-seg, модель сегментации бройлеров на основе YOLOv8-SP смогла лучше идентифицировать бройлеров-маленьких целей в дальнем конце клетки. Это предполагает, что базовая сеть, улучшенная с помощью модуля PPA, может эффективно извлекать многоуровневые признаки из изображения, тем самым повышая точность обнаружения маленьких целей. На рисунке 8с модель YOLOv8-seg не смогла сегментировать частично загороженных бройлеров, расположенных в середине изображения. В отличие от этого, как показано на рисунке 8d, модель YOLOv8-SP не только точно идентифицировала и сегментировала загороженных бройлеров, но и показала увеличение достоверности обнаружения для всех бройлеров по сравнению с моделью YOLOv8-seg. Это указывает на то, что улучшение функции перекрытия с помощью функции PT помогло направить модель на изучение более качественных прогнозов во время обучения, тем самым повышая как производительность обнаружения, так и сегментации. С точки зрения качества маски бройлера улучшенная модель YOLOv8-SP смогла более точно сегментировать каждого бройлера на изображении, что было очень полезно для извлечения координат бройлеров для последующей обработки.
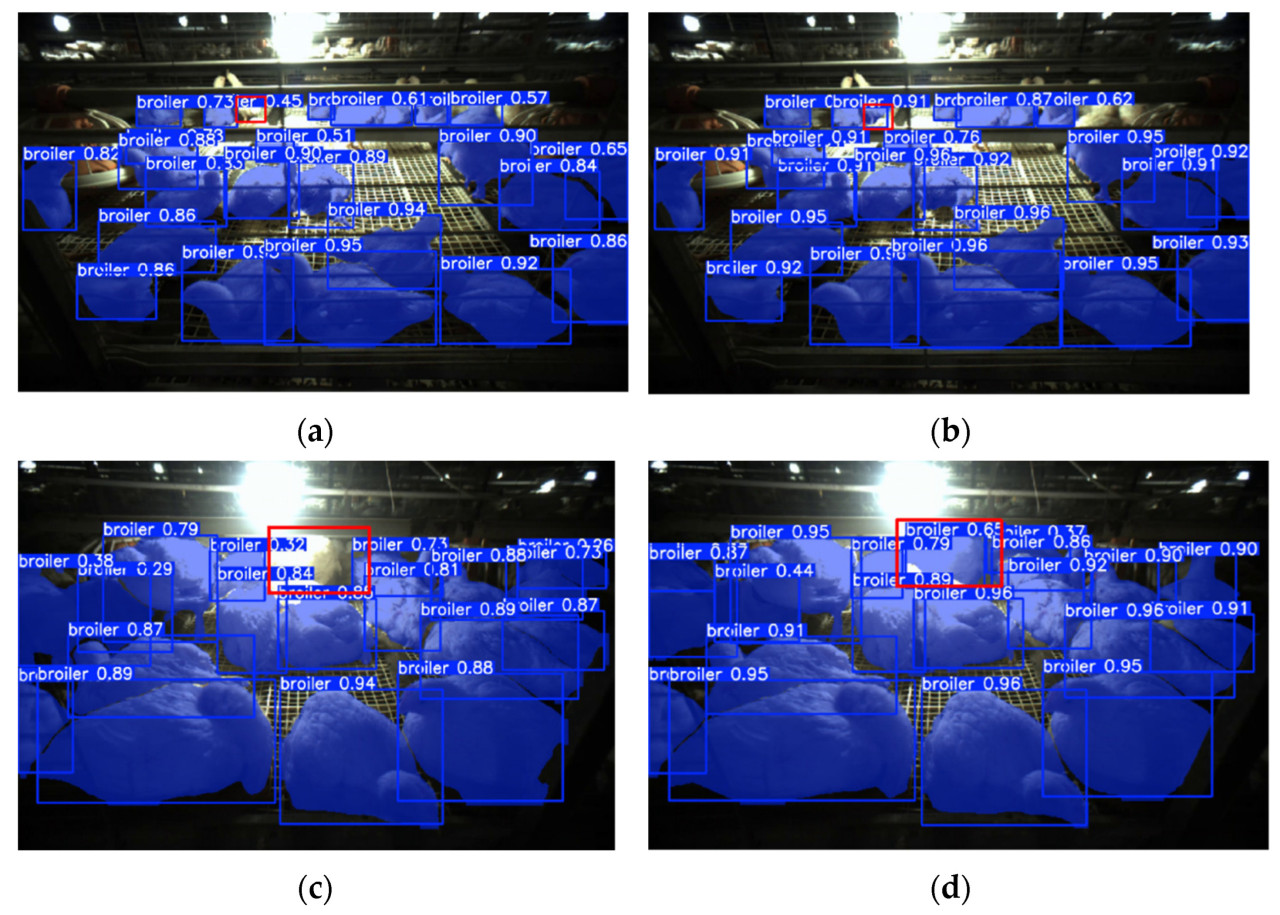
Рисунок 8. Визуализация результатов сегментации. (a,b) Результаты сегментации YOLOv8-seg и YOLOv8-SP в возрасте трех недель. (c,d) Результаты сегментации YOLOv8-SP в возрасте шести недель. В (a,c) красные прямоугольные рамки отмечают примеры пропущенных обнаружений бройлеров с помощью YOLOv8-seg. В (b,d) красные прямоугольные рамки отмечают успешные результаты обнаружения бройлеров с использованием YOLOv8-SP.
3.4. Проверка корреляции движения бройлера и значения AOFI
Чтобы подтвердить прямо пропорциональную зависимость между значением AOFI бройлера и его движением, были извлечены и визуализированы пиксели, соответствующие маске бройлера на карте оптического потока. Как показано на рисунке 9, черные области на изображениях представляют фон, а цветные пиксели указывают на движение бройлера. На картинках цвет пикселей означает направление движения, площадь пикселей указывает на степень движения, а яркость пикселей соответствует скорости движения. На рисунке 9а маска бройлера была преимущественно белой, что указывало на минимальное движение в течение наблюдаемого периода. По мере увеличения значения AOFI цветные пиксели начали появляться внутри белой маски бройлера, и как площадь, так и насыщенность цветных пикселей постепенно увеличивались. Например, на рисунке 9b желтые пиксели на голове бройлера указывали на небольшие движения вверх и вниз. На рисунках 9c–e показаны маски бройлеров, где красные и синие пиксели представляют движение как головы, так и шеи бройлера. На рисунке 9f маска бройлера имела значение AOFI 8,71, причем красные пиксели демонстрировали более высокую насыщенность, чем на рисунке 9d, что указывало на более быстрые движения головы. На рисунках 9g,h показаны маски бройлеров со значениями AOFI 55,61 и 111,65 соответственно. Области масок были почти полностью заполнены цветными пикселями с высокой насыщенностью, что предполагает, что бройлеры двигались быстро и энергично.
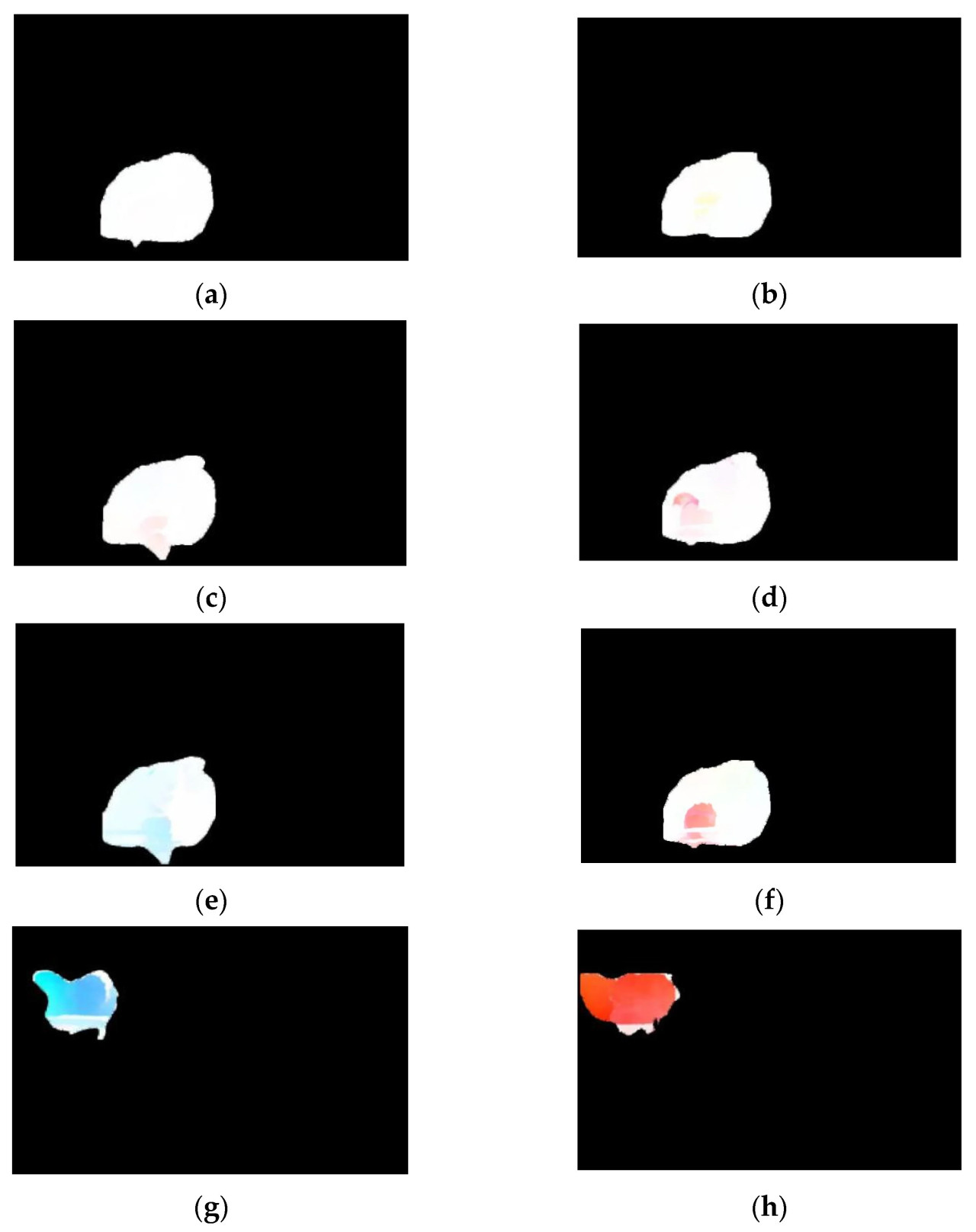
Рисунок 9. Примеры масок бройлеров с разными значениями AOFI. (a) Значение AOFI: 0,74, (b) Значение AOFI: 1,23, (c) Значение AOFI: 2,31, (d) Значение AOFI: 4,53, (e) Значение AOFI: 6,86, (f) Значение AOFI: 8,71, (g) Значение AOFI: 55,61 и (h) Значение AOFI: 111,65.
3.5. Идентификация кандидатов в павшие бройлеры с помощью порогового метода
Оптимальный порог для AOFI должен минимизировать вероятность идентификации живых бройлеров в ключевых кадрах как кандидатов в павшие, одновременно обеспечивая идентификацию фактических павших бройлеров как таковых. Поэтому из каждой недели с третьей по шестую случайным образом были выбраны четыре видеоролика, содержащих павших бройлеров, в результате чего получилось в общей сложности шестнадцать видеороликов. Из видеоклипов были извлечены ключевые кадры, содержащие павших и живых бройлеров, для анализа. Всего было подсчитано 904 павших бройлера и 904 живых бройлера, и их значения AOFI были записаны. На рисунке 10 представлено распределение значений AOFI для 904 живых бройлеров и 904 павших бройлеров. Как показано на рисунке 10а, значения AOFI павших бройлеров были сосредоточены около 1,0, в диапазоне от минимального значения 0,01 до максимального значения 26,70. Напротив, значения AOFI живых бройлеров, показанные на рисунке 10b, были более дисперсными, в основном в диапазоне от 0 до 20, с минимальным значением 0 и максимальным значением 138,89.
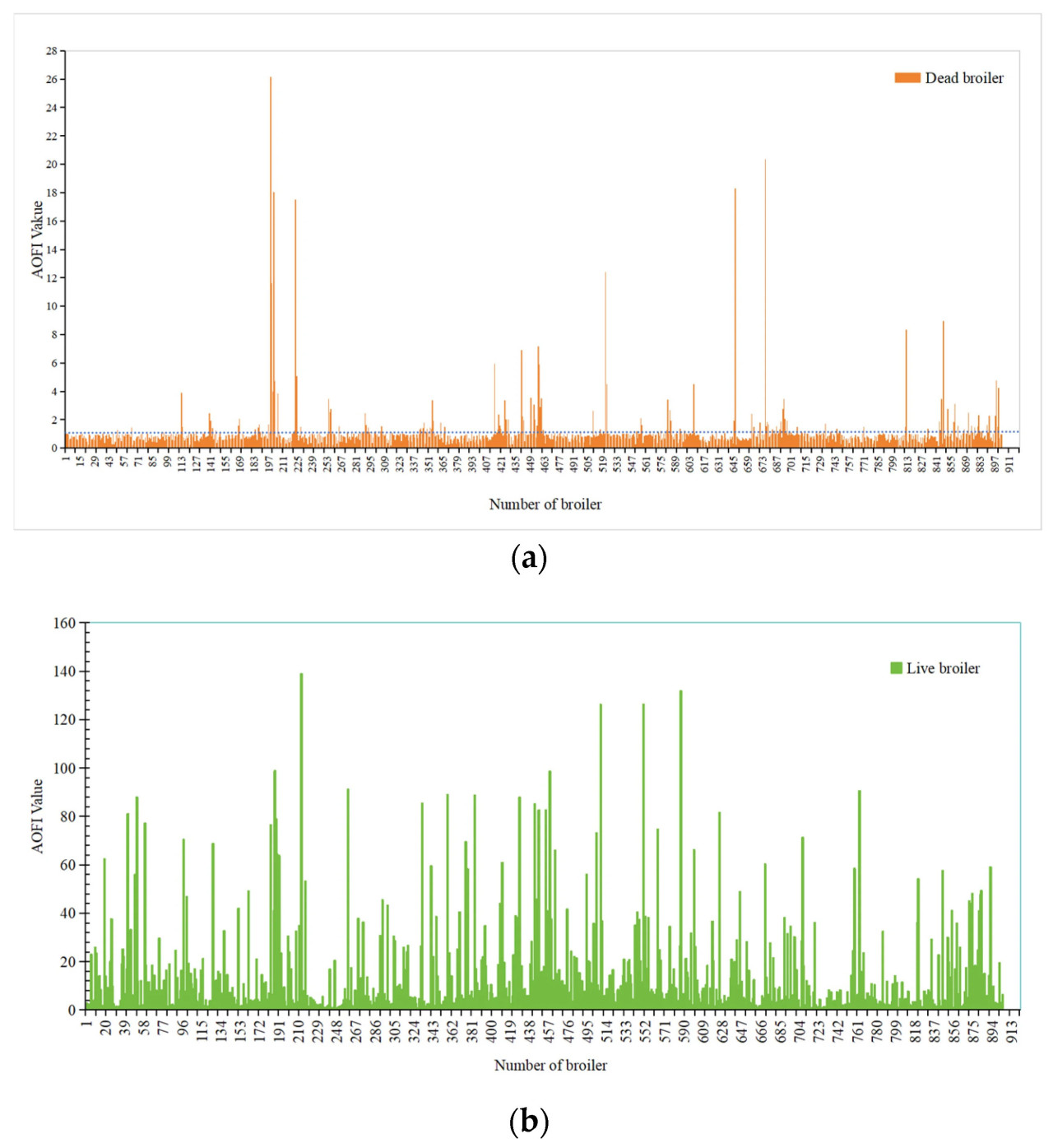
Рисунок 10. Статистика значений AOFI (a) павших и (b) живых бройлеров в ключевых кадрах.
Чтобы дальнейшее определить порог AOFI, производительность классификации кандидатов в павшие бройлеры в видеокадрах сравнивалась при пяти различных порогах AOFI. В таблице 3 подробно описаны доли павших и живых бройлеров, классифицированных как кандидаты в павшие при каждом пороге. По мере увеличения порога как доля павших бройлеров, идентифицированных как кандидаты в павшие, так и доля живых бройлеров, идентифицированных как кандидаты в павшие, постепенно увеличивались. При пороге 1,1 доля павших бройлеров, идентифицированных как кандидаты в павшие, составила 84,18%, что на 10,18% больше по сравнению с порогом 1,0. Доля живых бройлеров, идентифицированных как кандидаты в павшие, составила 11,83%, что на 2,65% больше по сравнению с порогом 1,0. При пороге 1,0 доля павших бройлеров, идентифицированных как кандидаты в павшие, составила 74,00%, что на 20,58% больше, чем при пороге 0,9. Доля живых бройлеров, идентифицированных как кандидаты в павшие, составила 9,18%, что на 2,28% больше, чем при пороге 0,9. Из результатов можно наблюдать, что 53,42% павших бройлеров имели значение AOFI в диапазоне от 0 до 0,9. Примерно 20,58% павших бройлеров демонстрировали значение AOFI в диапазоне от 0,9 до 1,0, в то время как 10,18% павших бройлеров имели порог AOFI, распределенный между 1,0 и 1,1. Количество павших и живых бройлеров со значениями AOFI, распределенными между 1,1 и 1,2 и между 1,2 и 1,3, не превышало 3% в любом случае. Поэтому установка порога AOFI на уровне 1,1 могла бы гарантировать классификацию максимального количества павших бройлеров как кандидатов в павшие, одновременно снижая вероятность классификации живых бройлеров как кандидатов в павшие. На рисунке 11а показана схема проецирования центральных точек кандидатов в павшие бройлеры, извлеченных из ключевых кадров с использованием AOFI, на последний ключевой кадр. Большинство центральных точек бройлеров в ключевых кадрах были отфильтрованы с помощью порога AOFI (рисунок 11b). Павшие бройлеры в ключевых кадрах характеризовались наибольшей концентрацией центральных точек, что означало, что павшие бройлеры в большинстве ключевых кадров были правильно классифицированы как кандидаты в павшие. На позициях живых бройлеров либо не было, либо было меньше центральных точек, что предполагает, что порог AOFI был эффективен в фильтрации большинства активных бройлеров в ключевых кадрах.

Рисунок 11. Схема распределения бройлеров. Каждая синяя точка представляет бройлера в ключевом кадре. (a) До удаления активных бройлеров и (b) после удаления активных бройлеров.

Таблица 3. Доли павших и живых бройлеров, классифицированных как кандидаты в павшие при разных порогах AOFI (T).
3.6. Результаты идентификации павших бройлеров
В видео частота, с которой павшие бройлеры идентифицировались как кандидаты в павшие, часто была самой высокой. Следовательно, частота, с которой каждый бройлер идентифицировался как кандидат в павшие в видео, подсчитывалась, и максимальное значение частоты выбиралось для ручной проверки, чтобы определить, был ли бройлер с самой высокой частотой действительно павшим. Восемьдесят видеороликов в обучающих наборах видео, содержащих павших бройлеров, использовались для проверки метода. После статистического анализа было обнаружено, что в 71 из 80 видеороликов павшие бройлеры идентифицировались как кандидаты в павшие с наивысшей частотой. Среди них в 67 видеороликах соотношение павших бройлеров, успешно идентифицированных как кандидаты в павшие на всех ключевых кадрах, превышало одну треть. Согласно статистическому результату, в этом исследовании порог частоты для идентификации павших бройлеров был установлен на уровне одной трети и протестирован на тестовом наборе, который включал 18 видеороликов с павшими бройлерами и 12 видеороликов только с живыми бройлерами.
В результатах проверки 18 видеороликов, содержащих павших бройлеров, павшие бройлеры в 16 видеороликах наиболее часто идентифицировались как кандидаты в павшие, причем частота превышала одну треть от общего количества кадров. В двух других видеороликах причиной того, что павшие бройлеры не были правильно идентифицированы, было то, что они были загорожены живыми бройлерами большую часть времени. Как показано на рисунках 12а,b, павшие бройлеры были частично загорожены окружающими бройлерами, причем в поле зрения была видна лишь небольшая часть их тел. Среди 12 видеороликов, содержащих только живых бройлеров, 10 были правильно идентифицированы. Одно видео было ошибочно идентифицировано из-за того, что водопроводная линия загораживала голову бройлера (рисунок 12с), что не позволяло алгоритму оптического потока обнаруживать движения бройлера (когда бройлеры находятся в состоянии покоя, большая часть их движения происходит от активности головы). Другое видео было ошибочно идентифицировано, потому что бройлер находился в состоянии сна, проявляя минимальные движения или вообще не двигаясь (рисунок 12d). В заключение, точность метода идентификации павших бройлеров на тестовом наборе составила 86,7%.
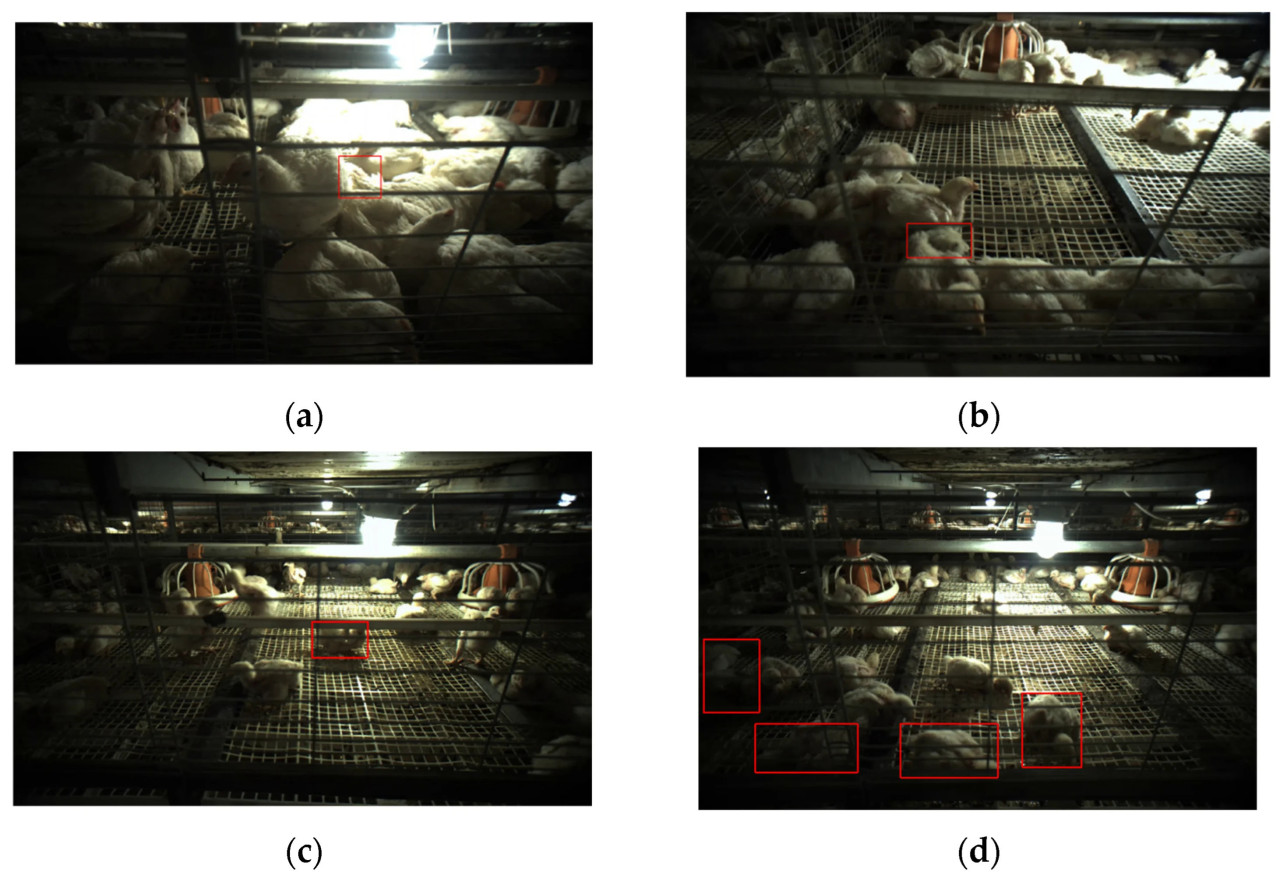
Рисунок 12. Примеры ошибочно идентифицированных бройлеров. (a,b) Павшие бройлеры были отмечены красными прямоугольными рамками. (c,d) Живой бройлер, загороженный водопроводной линией, и бройлер в состоянии сна были отмечены красными прямоугольными рамками соответственно.
4. Обсуждение
4.1. Ошибочная классификация кандидатов в павшие бройлеры
При использовании порога AOFI для идентификации кандидатов в павшие бройлеры в ключевых кадрах кандидаты в павшие бройлеры обычно состояли как из живых, так и из павших бройлеров. Причины ошибочной идентификации живых бройлеров как кандидатов в павшие в ключевых кадрах можно разделить на два типа. Во-первых, если бройлер вообще не двигался в интервале между двумя соседними ключевыми кадрами, его значение AOFI было бы почти нулевым, поэтому он идентифицировался как кандидат в павшие. Во-вторых, если движение бройлера было минимальным или медленным, что не могло быть обнаружено алгоритмом оптического потока, в результате чего значение AOFI оказывалось ниже порога, он идентифицировался как кандидат в павшие. Первый сценарий был неизбежен, потому что на бройлерной ферме движение бройлеров в клетках было случайным и неконтролируемым. Ключевые кадры не могли всегда захватывать движение всех бройлеров одновременно. Съемка видео в периоды, когда бройлеры были активны, могла бы снизить такие случаи. Второй сценарий часто происходил с бройлерами, находящимися дальше от камеры, из-за эффектов перспективы и углов съемки, что вызывало слишком маленькие движения, чтобы быть обнаруженными алгоритмом оптического потока. Эти удаленные бройлеры прямо исключались алгоритмом при идентификации кандидатов в павшие бройлеры. Кроме того, бройлеры, близкие к камере, с минимальными движениями также не обнаруживались алгоритмом оптического потока. Эта проблема постепенно улучшалась по мере взросления бройлеров. По мере того как бройлеры становились старше и крупнее, движения тела, вызванные их дыханием, могли быть обнаружены алгоритмом оптического потока, что снижало ошибочную идентификацию живых бройлеров как кандидатов в павшие. Чтобы смягчить второй сценарий, можно либо выбрать подходящее время для захвата видео, либо повысить чувствительность алгоритма оптического потока.
Павшие бройлеры в ключевых кадрах также иногда ошибочно классифицировались как живые. Основной причиной этой проблемы было загораживание павших бройлеров живыми бройлерами. Когда загораживание живыми бройлерами было минимальным, движение активных бройлеров вокруг павшего бройлера могло передавать оптический поток павшему бройлеру, что приводило к аномальному значению AOFI. Когда загораживание было более серьезным (с заблокированной площадью более половины размера павшего бройлера), модель сегментации могла не точно сегментировать части пикселей павшего бройлера, и движение окружающих активных бройлеров оказывало еще большее влияние на значение AOFI павшего бройлера. Ошибочная классификация павших бройлеров часто происходила в этом исследовании. В каждом из видеороликов, собранных в этом исследовании, соотношение идентификации павших бройлеров как кандидатов в павшие никогда не достигало 1,0. Результаты показали, что во всех видеороликах всегда были ключевые кадры, где павшие бройлеры не были правильно классифицированы как кандидаты в павшие.
4.2. Причина ложной идентификации павших бройлеров
Основной причиной низкой точности идентификации павших бройлеров было загораживание другими бройлерами. Когда павший бройлер в значительной степени загорожен, становится трудно точно сегментировать павшего бройлера. Его значение AOFI более подвержено влиянию других кур и может даже быть пропущено во время сегментации. В 19 видеороликах, где идентификация павшего бройлера не удалась, павшие бройлеры были загорожены в течение длительного времени, причем более половины их тел были закрыты. В 10 из этих видеороликов загораживание павших бройлеров в основном вызывалось пьющими бройлерами. Загораживание всегда было ключевым фактором, препятствующим точности идентификации здоровья и поведения птицы на основе анализа видео или изображений. Liu и др. [29] пытались идентифицировать павших кур с помощью алгоритма YOLOv4, но не смогли распознать павших кур, когда их головы и ноги не были видны. Nasiri и др. [30] также сообщили, что их алгоритм обнаружения питья не смог распознать поведение питья бройлеров, когда они стояли за водопроводной линией. По мере увеличения степени загораживания павших бройлеров считалось, что любой метод на основе зрения не сможет точно идентифицировать павших бройлеров.
4.3. Сравнение с родственными исследованиями
В таблице 4 показаны методы идентификации и существующие проблемы в предыдущих исследованиях по распознаванию павшей птицы. Исследователи в основном использовали физический внешний вид или температурные характеристики птицы для идентификации павшей птицы [12,31]. Эти методы идентификации павшей птицы, созданные на основе датчиков цветных камер и технологий глубокого обучения, обычно имеют преимущества эффективности, минимальной инвазивности и простоты развертывания. Однако в большинстве исследований существует общая проблема трудности идентификации загороженной павшей птицы. Дополнительно, наше предыдущее исследование показало, что некоторые павшие бройлеры в клеточном содержании несушек имеют внешние характеристики, похожие на нормальных бройлеров, что приводит к пропущенным обнаружениям при использовании методов на основе внешнего вида для идентификации павших бройлеров [26]. Как показано на рисунке 13а, на коммерческой бройлерной ферме большинство павших бройлеров находили с перевернутой грудью, демонстрируя красный или коричневато-красный цвет, и с выставленными ногами, что явно отличается от живых бройлеров, показанных на рисунке 13d. Однако, как показано на рисунках 13b,c, некоторых павших бройлеров находили лежащими на груди, из-за чего они напоминали отдыхающих живых бройлеров и вызывали трудности у алгоритма в точной идентификации. Метод идентификации павших бройлеров, предложенный в этом исследовании, не зависел от физического внешнего вида и мог эффективно идентифицировать павших бройлеров, похожих на живых.
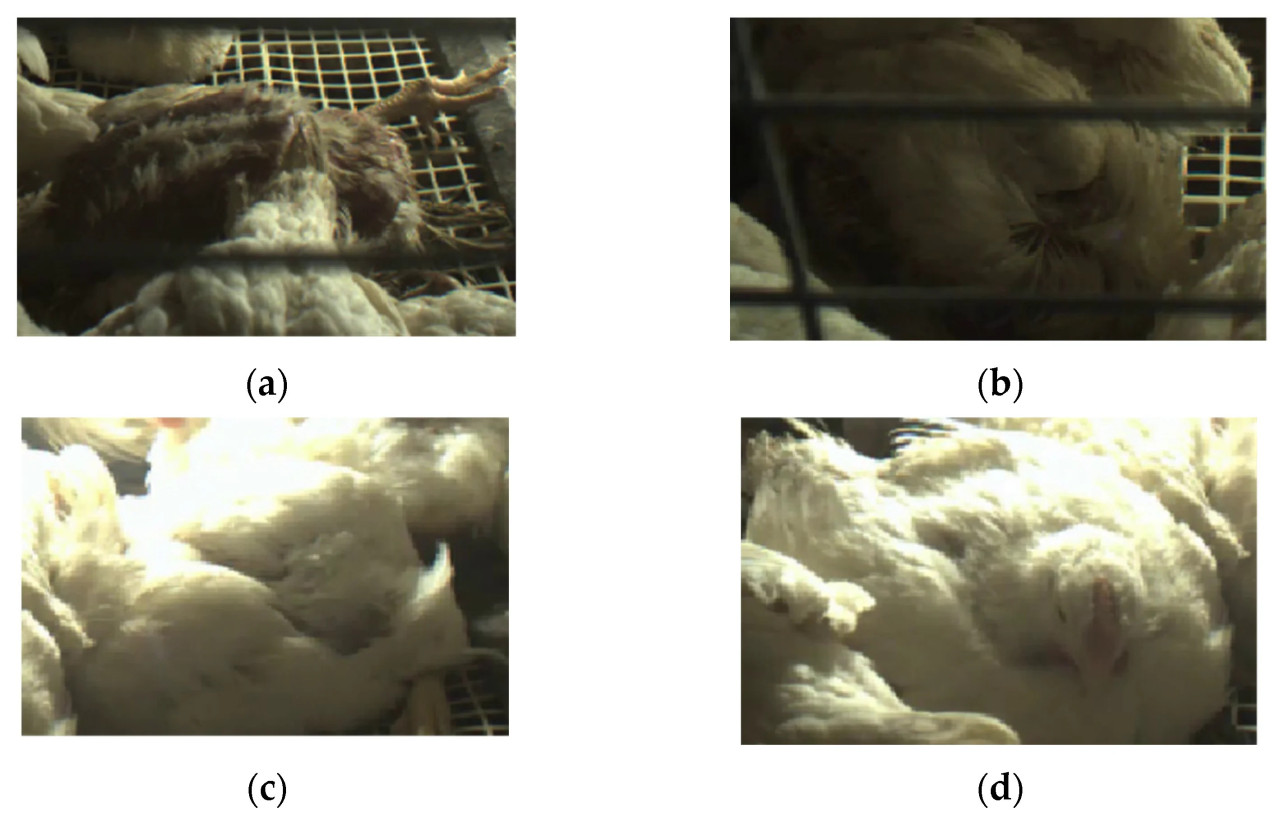
Рисунок 13. Примеры павших и живых бройлеров. (a) Павшие бройлеры, погибшие от острых причин, обычно обнаруживаются грудью вверх, а конечности свисают вниз, причем цвет брюшка со временем постепенно меняется от розоватого до коричневато-черного. (b,c) Павшие бройлеры, погибшие от хронических заболеваний, имеют внешний вид, похожий на отдыхающих живых бройлеров. (d) Отдыхающий живой бройлер.
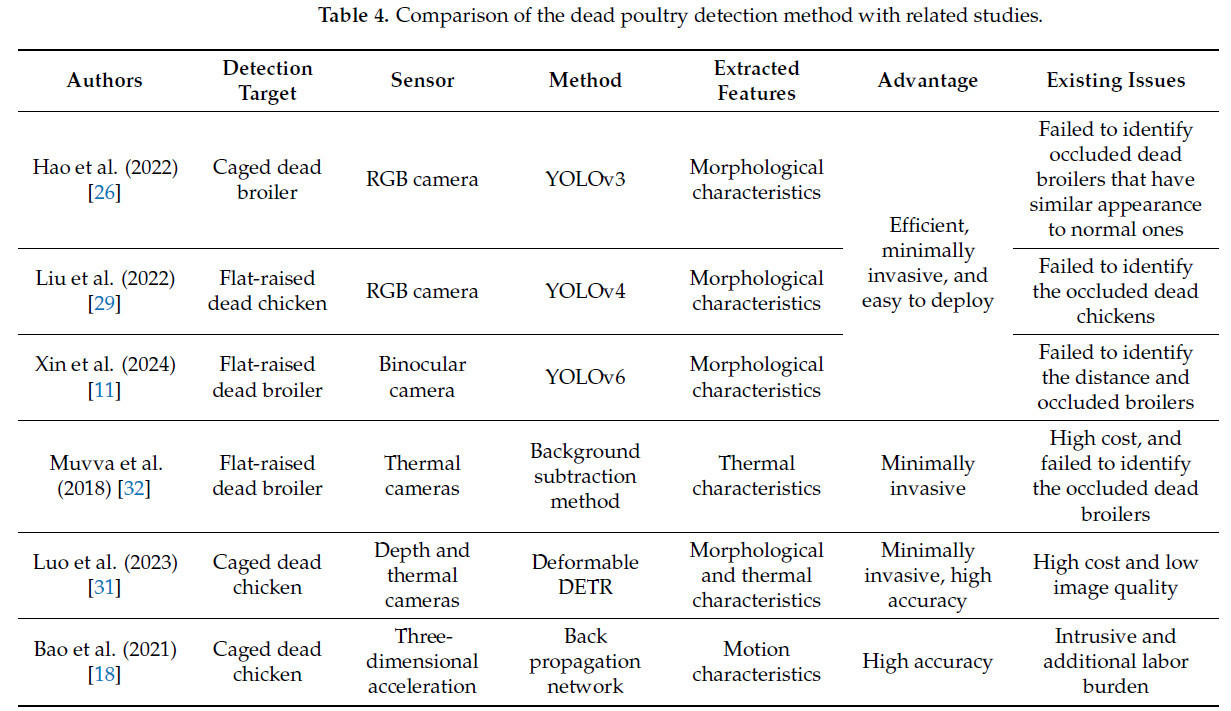
Таблица 4. Сравнение метода обнаружения павшей птицы с родственными исследованиями.
4.4. Ограничения и дальнейшее улучшение
Хотя метод исследования, предложенный в этой статье, мог эффективно идентифицировать павших бройлеров, похожих по внешнему виду на нормальных бройлеров, он, как и другие методы на основе зрения, испытывал трудности с сильно загороженными павшими. Однако на практике методы на основе видео могут иметь более сильную устойчивость к загораживанию по сравнению с методами на основе изображений. Это связано с тем, что когда степень загораживания павших бройлеров меняется, методы на основе изображений могут не иметь возможности захватить изображения с меньшим загораживанием для достижения идентификации павших. По сравнению с исследованиями, которые полагаются на общедоступные наборы данных или изображения, собранные в лабораторных условиях для идентификации здоровья птицы, подход, предложенный в этом исследовании, более практичен для производственной среды. Видеоролики, использованные в этом исследовании, были сняты на коммерческих птицефабриках, причем метод сбора строго следовал позициям и углам, указанным платформой инспекции [26]. С точки зрения применения, большинство существующих платформ инспекции падежа птицы в основном используют методы обнаружения на основе изображений для идентификации павшей птицы. Аппаратная стоимость метода, предложенного в этом исследовании, идентична стоимости обнаружения на основе изображений, хотя развертывание алгоритма немного сложнее. Более того, стратегия инспекции для мобильных платформ инспекции отличается: этот метод требует остановки у каждой клетки не менее чем на одну минуту для захвата видео, что приводит к увеличению времени инспекции.
Чтобы повысить устойчивость предложенного алгоритма идентификации павших бройлеров, будущая проверка должна включать больше видеороликов. Улучшения могут включать уменьшение загораживания и повышение чувствительности оценки оптического потока. Например, съемка видео непосредственно перед временем кормления может предотвратить загораживание обзора потенциальных павших бройлеров пьющими бройлерами. Увеличение продолжительности видео позволяет живым бройлерам совершать больше движений. Более точный алгоритм оценки оптического потока для обнаружения тонких движений, таких как те, что вызваны дыханием у молодых бройлеров, может повысить точность идентификации кандидатов в павшие бройлеры в ключевых кадрах. В будущем мы дальнейшее рассмотрим возможность использования алгоритмов понимания видео для более точной идентификации движений каждого бройлера, тем самым идентифицируя павших бройлеров в более коротких видеороликах.
5. Выводы
В этом исследовании представлен новый метод идентификации павших бройлеров на коммерческих бройлерных фермах. В отличие от предыдущих исследований, которые были сосредоточены на идентификации павшей птицы на основе аномалий внешнего вида и температуры, это исследование имитировало человеческий подход к идентификации павших бройлеров путем анализа их движений на видеозаписи. Была разработана сеть YOLOv8-SP, и путем внедрения модуля PPA и функции PT в сеть YOLOv8-seg способность модели распознавать мелкие цели и улучшать качество масок была значительно повышена. Чтобы описать движение бройлеров между ключевыми кадрами, был определен порог AOFI для оценки их движения, что позволило предварительно идентифицировать павших бройлеров. Окончательная идентификация павших бройлеров в видео определялась путем расчета частоты, с которой каждый бройлер классифицировался как павший на всех ключевых кадрах.
Точность идентификации предложенного метода на основе видео составила 86,7%. Это было в основном связано с тем, что наш набор видеоданных содержал значительное количество загороженных павших бройлеров. Как и в методах на основе изображений, точная идентификация сильно загороженных бройлеров остается проблемой. Для дальнейшего повышения производительности рекомендуется снимать видео бройлеров перед временем кормления, что уменьшит загораживание, вызванное активными бройлерами. Дополнительно, использование более чувствительного алгоритма оптического потока может повысить точность обнаружения. Наконец, этот метод может быть особенно хорошо подходит для напольного содержания бройлеров, поскольку эти бройлеры содержатся с меньшей плотностью, что делает их менее подверженными загораживанию.
Ссылки
1. Castro, F.L.S.; Chai, L.; Arango, J.; Owens, C.M.; Smith, P.A.; Reichelt, S.; DuBois, C.; Menconi, A. Poultry Industry Paradigms: Connecting the Dots. J. Appl. Poult. Study 2023, 32, 100310. [Google Scholar] [CrossRef]
2. Astill, J.; Dara, R.A.; Fraser, E.D.G.; Roberts, B.; Sharif, S. Smart Poultry Management: Smart Sensors, Big Data, and the Internet of Things. Comput. Electron. Agric. 2020, 170, 105291. [Google Scholar] [CrossRef]
3. Tainika, B.; Şekeroğlu, A.; Akyol, A.; Waithaka Ng’ang’a, Z. Welfare Issues in Broiler Chickens: Overview. World’s Poult. Sci. J. 2023, 79, 285–329. [Google Scholar] [CrossRef]
4. Kittelsen, K.E.; Granquist, E.G.; Kolbjørnsen, Ø.; Nafstad, O.; Moe, R.O. A Comparison of Post-Mortem Findings in Broilers Dead-on-Farm and Broilers Dead-on-Arrival at the Abattoir. Poult. Sci. 2015, 94, 2622–2629. [Google Scholar] [CrossRef] [PubMed]
5. Zhuang, X.; Zhang, T. Detection of Sick Broilers by Digital Image Processing and Deep Learning. Biosyst. Eng. 2019, 179, 106–116. [Google Scholar] [CrossRef]
6. Fodor, I.; Van Der Sluis, M.; Jacobs, M.; De Klerk, B.; Bouwman, A.C.; Ellen, E.D. Automated Pose Estimation Reveals Walking Characteristics Associated with Lameness in Broilers. Poult. Sci. 2023, 102, 102787. [Google Scholar] [CrossRef]
7. Cui, Y.; Kong, X.; Chen, C.; Li, Y. study on Broiler Health Status Recognition Method Based on Improved YOLOv5. Smart Agric. Technol. 2023, 6, 100324. [Google Scholar] [CrossRef]
8. Aydin, A. Development of an Early Detection System for Lameness of Broilers Using Computer Vision. Comput. Electron. Agric. 2017, 136, 140–146. [Google Scholar] [CrossRef]
9. Sadeghi, M.; Banakar, A.; Minaei, S.; Orooji, M.; Shoushtari, A.; Li, G. Early Detection of Avian Diseases Based on Thermography and Artificial Intelligence. Animals 2023, 13, 2348. [Google Scholar] [CrossRef] [PubMed]
10. Yogi, K.K.; Yadav, S.P. Chicken Diseases Detection and Classification Based on Fecal Images Using EfficientNetB7 Model. Evergreen 2024, 11, 314–330. [Google Scholar] [CrossRef]
11. Xin, C.; Li, H.; Li, Y.; Wang, M.; Lin, W.; Wang, S.; Zhang, W.; Xiao, M.; Zou, X. study on an Identification and Grasping Device for Dead Yellow-Feather Broilers in Flat Houses Based on Deep Learning. Agriculture 2024, 14, 1614. [Google Scholar] [CrossRef]
12. Zhao, Y.; Shen, M.; Liu, L.; Chen, J.; Zhu, W. Study on the method of detecting dead chickens in caged chicken based on improved YOLOv5s and image fusion. J. Nanjing Agric. Univ. 2024, 47, 369–382. (In Chinese) [Google Scholar]
13. Carpentier, L.; Vranken, E.; Berckmans, D.; Paeshuyse, J.; Norton, T. Development of Sound-Based Poultry Health Monitoring Tool for Automated Sneeze Detection. Comput. Electron. Agric. 2019, 162, 573–581. [Google Scholar] [CrossRef]
14. Adebayo, S.; Aworinde, H.O.; Akinwunmi, A.O.; Alabi, O.M.; Ayandiji, A.; Sakpere, A.B.; Adeyemo, A.; Oyebamiji, A.K.; Olaide, O.; Kizito, E. Enhancing Poultry Health Management through Machine Learning-Based Analysis of Vocalization Signals Dataset. Data Brief 2023, 50, 109528. [Google Scholar] [CrossRef] [PubMed]
15. Cuan, K.; Zhang, T.; Li, Z.; Huang, J.; Ding, Y.; Fang, C. Automatic Newcastle Disease Detection Using Sound Technology and Deep Learning Method. Comput. Electron. Agric. 2022, 194, 106740. [Google Scholar] [CrossRef]
16. Bhandekar, A.; Udutalapally, V.; Das, D. Acoustic Based Chicken Health Monitoring in Smart Poultry Farms. In Proceedings of the 2023 IEEE International Symposium on Smart Electronic Systems (iSES), Ahmedabad, India, 18 December 2023; pp. 224–229. [Google Scholar]
17. Mei, W.; Yang, X.; Zhao, Y.; Wang, X.; Dai, X.; Wang, K. Identification of Aflatoxin-Poisoned Broilers Based on Accelerometer and Machine Learning. Biosyst. Eng. 2023, 227, 107–116. [Google Scholar] [CrossRef]
18. Bao, Y.; Lu, H.; Zhao, Q.; Yang, Z.; Xu, W. Detection system of dead and sick chickens in large scale farms based on artificial intelligence. Math. Biosci. Eng. 2021, 18, 6117–6135. [Google Scholar] [CrossRef] [PubMed]
19. Wang, Y.; Wang, W.; Li, Y.; Guo, J.; Xu, Y.; Ma, J.; Ling, Y.; Fu, Y.; Jia, Y. study on Traditional and Deep Learning Strategies Based on Optical Flow Estimation—A Review. J. King Saud Univ. Comput. Inf. Sci. 2024, 36, 102029. [Google Scholar] [CrossRef]
20. Dawkins, M.S.; Wang, L.; Ellwood, S.A.; Roberts, S.J.; Gebhardt-Henrich, S.G. Optical Flow, Behaviour and Broiler Chicken Welfare in the UK and Switzerland. Appl. Anim. Behav. Sci. 2021, 234, 105180. [Google Scholar] [CrossRef]
21. Neves, D.P.; Mehdizadeh, S.A.; Tscharke, M.; Nääs, I.D.A.; Banhazi, T.M. Detection of Flock Movement and Behaviour of Broiler Chickens at Different Feeders Using Image Analysis. Inf. Process. Agric. 2015, 2, 177–182. [Google Scholar] [CrossRef]
22. Xu, S.; Zheng, S.; Xu, W.; Xu, R.; Wang, C.; Zhang, J.; Teng, X.; Li, A.; Guo, L. HCF-Net: Hierarchical context fusion network for infrared small object detection. arXiv 2024, arXiv:2403.10778. [Google Scholar]
23. Feng, C.; Zhong, Y.; Gao, Y.; Scott, M.R.; Huang, W. TOOD: Task-aligned One-stage Object Detection. In Proceeding of the IEEE/CVF International Conference on Computer Vision (ICCV), Montreal, QC, Canada, 10–17 October 2021; pp. 3490–3499. [Google Scholar]
24. Lyu, C.; Zhang, W.; Huang, H.; Zhou, Y.; Wang, Y.; Liu, Y.; Zhang, S.; Chen, K. RTMDet: An empirical study of designing real-time object detectors. arXiv 2022, arXiv:2212.07784. [Google Scholar]
25. Morimitsu, H.; Zhu, X.; Cesar, R.M.; Ji, X.; Yin, X.-C. RAPIDFlow: Recurrent adaptable pyramids with iterative decoding for efficient optical flow estimation. In Proceedings of the 2024 IEEE International Conference on Robotics and Automation (ICRA), Yokohama, Japan, 13–17 May 2024; pp. 2946–2952. [Google Scholar]
26. Hao, H.; Fang, P.; Duan, E.; Yang, Z.; Wang, L.; Wang, H. A Dead Broiler Inspection System for Large-Scale Breeding Farms Based on Deep Learning. Agriculture 2022, 12, 1176. [Google Scholar] [CrossRef]
27. Wang, X.; Zhang, R.; Kong, T.; Li, L.; Shen, C. SOLOv2: Dynamic and fast instance segmentation. Adv. Neural Inf. Process. Syst. 2020, 33, 17721–17732. [Google Scholar]
28. He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask R-CNN. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar]
29. Liu, H.-W.; Chen, C.-H.; Tsai, Y.-C.; Hsieh, K.-W.; Lin, H.-T. Identifying Images of Dead Chickens with a Chicken Removal System Integrated with a Deep Learning Algorithm. Sensors 2021, 21, 3579. [Google Scholar] [CrossRef]
30. Nasiri, A.; Amirivojdan, A.; Zhao, Y.; Gan, H. An Automated Video Action Recognition-Based System for Drinking Time Estimation of Individual Broilers. Smart Agric. Technol. 2024, 7, 100409. [Google Scholar] [CrossRef]
31. Luo, S.; Ma, Y.; Jiang, F.; Wang, H.; Tong, Q.; Wang, L. Dead Laying Hens Detection Using TIR-NIR-Depth Images and Deep Learning on a Commercial Farm. Animals 2023, 13, 1861. [Google Scholar] [CrossRef] [PubMed]
32. Muvva, V.V.; Zhao, Y.; Parajuli, P.; Zhang, S.; Tabler, T.; Purswell, J. Automatic Identification of Broiler Mortality Using Image Processing Technology. In Proceedings of the 10th International Livestock Environment Symposium (ILES X), Omaha, NE, USA, 25–27 September 2018; p. 1. [Google Scholar]
Hao H, Zou F, Duan E, Lei X, Wang L, Wang H. Research on Broiler Mortality Identification Methods Based on Video and Broiler Historical Movement. Agriculture. 2025; 15(3):225. https://doi.org/10.3390/agriculture15030225
Перевод статьи «Research on Broiler Mortality Identification Methods Based on Video and Broiler Historical Movement» авторов Hao H, Zou F, Duan E, Lei X, Wang L, Wang H., оригинал доступен по ссылке. Лицензия: CC BY. Изменения: переведено на русский язык
Фото: freepik

















































































































Комментарии (0)