Оценка высоты кукурузы по снимкам с дрона: алгоритм сегментации пространства столбцов
Геномика растений достигла значительного прогресса благодаря развитию информационных технологий, однако методы фенотипических измерений отстают, что сдерживает селекцию растений. Поскольку кукуруза является одной из трех основных зерновых культур Китая, точное измерение высоты растений имеет решающее значение для оценки роста и продуктивности сельскохозяйственных культур. Данное исследование решает проблемы сегментации растений и неточного определения высоты растений в популяциях кукурузы в полевых условиях.
Аннотация
Трехмерное плотное облако точек было реконструировано с использованием метода «структура из движения – мультистереозрение» (SFM-MVS) на основе последовательностей мультиракурсных изображений, полученных с беспилотного летательного аппарата (БПЛА). Для улучшения сегментации растений мы предлагаем приближенный алгоритм сегментации пространства столбцов, который сочетает метод пространства столбцов с техникой ограничивающих рамок. Предложенный метод достиг точности сегментации, превышающей 90%, в условиях плотного полога, значительно превосходя традиционные алгоритмы, такие как наращивание областей (80%) и евклидова кластеризация (75%). Кроме того, извлеченные значения высоты растений продемонстрировали высокую корреляцию с ручными измерениями, с значениями R2 в диапазоне от 0,8884 до 0,9989 и значениями RMSE до 0,0148 м. Однако масштабируемость метода для более крупных сельскохозяйственных предприятий может столкнуться с проблемами из-за вычислительных затрат при обработке крупномасштабных наборов данных и потенциальной вариабельности производительности в различных условиях окружающей среды. Решение этих проблем посредством оптимизации алгоритмов, параллельной обработки и интеграции дополнительных источников данных, таких как мультиспектральные данные или данные лидара, могло бы повысить его масштабируемость и надежность. Результаты демонстрируют, что метод может точно отражать высоту растений кукурузы, обеспечивая надежное решение для крупномасштабного полевого фенотипирования кукурузы. Метод имеет потенциальное применение в высокопроизводительном мониторинге фенотипов сельскохозяйственных культур и точном земледелии.
1. Введение
Высота растений, являясь одним из наиболее значимых фенотипических показателей, отражает развитие и жизнеспособность сельскохозяйственных культур, что имеет ключевое значение для селекции и прогнозирования урожайности [1,2,3]. Данные фенотипирования сельскохозяйственных культур составляют основу селекции растений и управления полями [4]. Традиционные методы измерения высоты растений основаны на ручном труде или двумерных снимках, однако они характеризуются проблемами с точностью и эффективностью. В последнее время технологии дистанционного зондирования на базе БПЛА продемонстрировали способность повышать эффективность и точность фенотипирования растений, в частности для крупномасштабных применений [5]. Однако такие вызовы, как изменчивость условий окружающей среды, плотная структура полога и перекрытие растений, остаются основными препятствиями для точного измерения высоты растений в полевых условиях.
С развитием технологий трехмерной реконструкции данные облаков точек теперь могут использоваться для определения высоты растений [6]. Исследования, такие как работы Хосе и др. [7] и Бендига и др. [8], успешно применили методы 3D-реконструкции на основе БПЛА для оценки высоты растений пшеницы и кукурузы соответственно, используя технику «структура из движения – мультистереозрение» (SFM-MVS). Эти методы обеспечили высокую точность, сохраняя при этом экономическую эффективность по сравнению с активными сенсорами, такими как LiDAR. В частности, кукуруза является основной зерновой культурой Китая, и точное измерение высоты растений имеет важнейшее значение для повышения продуктивности и удовлетворения спроса [9,10]. Две основные категории подходов к 3D-реконструкции — это активные и пассивные методы. Среди них пассивные методы реконструкции, такие как структура из движения (SFM), основанные на мультивидовой геометрии, предлагают преимущества низкой стоимости, высокой точности и простоты использования [11]. В сочетании с методом мультивидовой геометрии БПЛА, оснащенный камерой высокого разрешения для захвата последовательностей изображений, может эффективно и неразрушающе получать трехмерные данные облаков точек сельскохозяйственных культур [12,13,14]. Однако необходима дальнейшая работа по устранению ограничений методов на основе SFM при работе со сложными средами, такими как плотные пологи культур и переменные условия освещения, которые могут влиять на точность сегментации и оценку высоты [15].
Хотя измерения высоты культур на основе облаков точек постепенно приобрели популярность в сельскохозяйственных исследованиях, большинство этих измерений в настоящее время ограничиваются измерениями отдельных растений в малых масштабах в поле или в помещении, и меньше измерений проводится на полевых группах с большим затенением и более плотным расположением исследуемых растений [16,17]. Недавние исследования показали, что интеграция мультиспектральных данных или данных LiDAR с методами SFM может улучшить точность сегментации в сложных полевых условиях [18,19]. Кроме того, были изучены алгоритмические усовершенствования, такие как сегментация наращиванием областей и подходы на основе машинного обучения, для улучшения обработки облаков точек в плотных популяциях культур [20].
Масштабируемость методов облаков точек на базе БПЛА, включая предлагаемый подход, является критическим фактором для их применения на более крупных сельскохозяйственных полях и для различных типов культур. Для больших полей основные проблемы включают обработку постоянно растущих наборов данных и обеспечение стабильной точности в различных условиях окружающей среды (например, неровный рельеф и неоднородное освещение). Эти вызовы могут быть решены путем интеграции фреймворков параллельной обработки, оптимизации траекторий полета для сбора данных и использования облачных платформ обработки данных. Кроме того, предлагаемый приближенный алгоритм сегментации пространства столбцов может быть адаптирован для других типов культур путем настройки параметров, таких как пороги плотности облака точек, или включения дополнительных входных данных, например мультиспектральных данных или данных LiDAR, для обработки различий в структуре полога и морфологии растений. Будущие исследования должны быть направлены на валидацию метода для различных культур, таких как пшеница, рис или соя, чтобы обеспечить более широкую применимость и масштабируемость.
Исследования, проведенные как в стране, так и за рубежом, показали, что измерение высоты растений на основе облаков точек является более точным и эффективным, чем традиционные методы [21]. Например, исследователи получили впечатляющие результаты в измерении высоты растений различных культур путем реконструкции данных облаков точек с использованием LIDAR или мультивидовой геометрии. Однако широкому использованию оборудования LIDAR препятствует его высокая стоимость [22]. С другой стороны, подход на основе мультивидовой геометрии обеспечивает недорогой сбор высококачественных данных облаков точек, что особенно подходит для ситуации исследования полевых популяций культур [23]. Однако из-за затенения растений и плотной посадки полевые популяции культур создают больше трудностей при извлечении высоты растений и сегментации данных облаков точек [24]. Следовательно, исследования методов на основе облаков точек для измерения высоты растений в полевых популяциях могут дать новые концепции для цифрового сельского хозяйства.
В данном исследовании мы собираем полевые последовательности изображений популяций кукурузы и создаем данные облаков точек, комбинируя дистанционное зондирование с БПЛА и технологию 3D-реконструкции на основе мультивидовой геометрии [25,26]. На этой основе разрабатывается модель оценки высоты растений, предлагается новый метод измерения высоты растений в полевых популяциях, а также исследуются алгоритмы предварительной обработки и сегментации данных облаков точек [27]. Данное исследование не только устраняет ограничения традиционных методов измерения высоты растений, но и способствует развитию методов фенотипирования на базе БПЛА, предлагая новый приближенный алгоритм сегментации пространства столбцов [28]. Этот алгоритм направлен на преодоление проблем, связанных с плотной структурой полога и перекрывающимися растениями, улучшая точность оценки высоты растений в полевом масштабе.
В дополнение к продвижению использования технологии облаков точек в сельском хозяйстве и предоставлению технической поддержки для информатизации и беспилотного измерения фенотипов культур, данное исследование ставит целью восполнить пробел в области измерения высоты растений по данным облаков точек популяций культур в полевом масштабе. Это также будет иметь огромное значение для сбора параметров роста кукурузы и переменного управления.
2. Материалы и методы
2.1. Район исследования и дизайн эксперимента
В качестве экспериментального материала для данного исследования использовались растения кукурузы, выращенные на учебно-исследовательской базе Южно-Китайского сельскохозяйственного университета. Карта участка тестовых полей кукурузы, показывающая данные, собранные с двух различных тестовых полей, представлена на Рисунке 1. Поле 1 занимает площадь приблизительно 0,3 гектара, а Поле 2 — приблизительно 0,2 гектара. Аэрофотоснимки, показанные на Рисунке 1, были получены с использованием системы БПЛА на 30-й день после появления всходов кукурузы. Эти данные предоставляют всесторонний обзор экспериментальной установки. Данное исследование включало пять серий опытов, проведенных в трех различных условиях произрастания растений кукурузы на двух полях. Поля обозначены как Поле 1 и Поле 2, а группы растений кукурузы — как a, b, c, d и e. Для данного исследования были разработаны четыре составные пробные группы: опыт 1 включал растения b и c; опыт 2 — растения d и e; опыт 3 — растения a, b и c; опыт 4 — все пять наборов (a, b, c, d и e). В опытах 1 и 2 экспериментальные условия представляли собой одинаковые растения кукурузы на одном и том же поле. В опытах 3 и 4 условия включали разные растения кукурузы на разных полях. Составные пробные группы обобщены в Таблице 1.
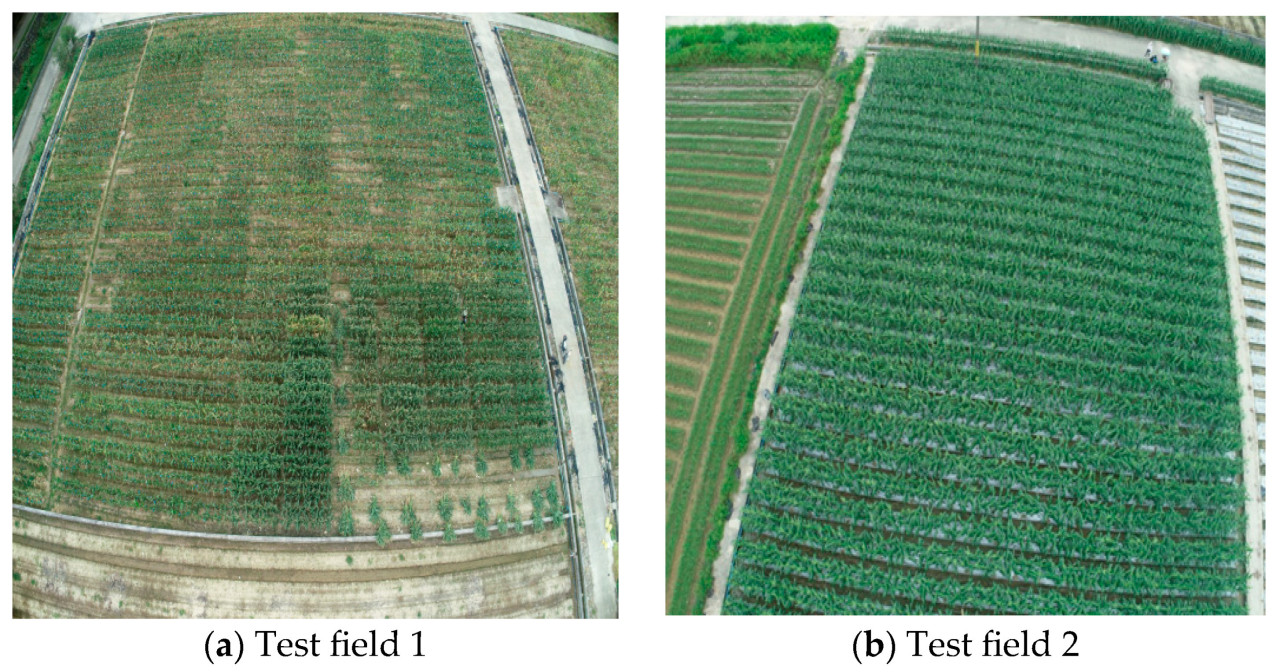
Рисунок 1. Аэрофотоснимки экспериментальных тестовых полей кукурузы. (a) Тестовый участок 1: площадь приблизительно 0,3 га, и (b) Тестовый участок 2: площадь приблизительно 0,2 га. Снимки получены на 30-й день после появления всходов кукурузы с использованием мультиракурсной съемки с БПЛА.
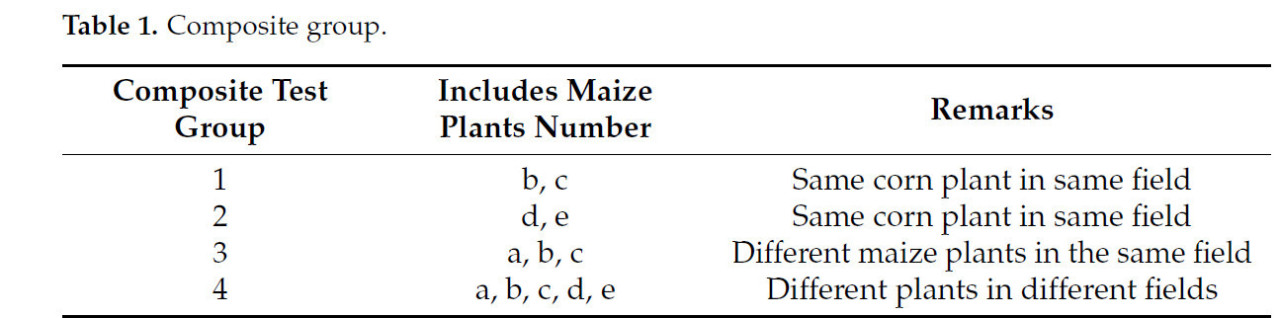
Таблица 1. Составная группа.
2.2. Система сбора данных о полевой популяции кукурузы
Используя БПЛА с монокулярными камерами для захвата последовательностей 2D-изображений и создания 3D-моделей, полевая система сбора данных о кукурузе использует технологию 3D-реконструкции с мультивидовой геометрией, которая широко применяется в областях локализации, навигации и виртуальной реальности. «Структура из движения – мультистереозрение» (SFM-MVS), извлечение и сопоставление признаков являются основными технологиями, используемыми на этапах разреженной и плотной реконструкции 3D-реконструкции.
Полевая система сбора данных о популяции культур в исследовании включала настольный компьютер под управлением Windows 10 (Intel Core i5-10500, 32 ГБ ОЗУ, видеокарта Gigabyte 3070); DJI Phantom 4 Pro, включая дрон, пульт дистанционного управления и 20-мегапиксельную КМОП-камеру; рулетку; и дополнительные инструменты. Дрон DJI Elf 4 Pro был выбран на основе следующих соображений. Дрон DJI Elf 4 Pro был выбран для этого исследования из-за его камеры высокого разрешения 20 МП, стабильности полета с GPS-навигацией и экономической эффективности по сравнению с более дорогими БПЛА с LiDAR или мультиспектральными сенсорами. Он обеспечивает достаточную точность для 3D-реконструкции и измерения высоты растений, будучи простым в эксплуатации, что делает его идеальным для сбора полевых данных в крупных масштабах. В отличие от более дорогих БПЛА, DJI Elf 4 Pro предлагает хороший баланс производительности, простоты использования и доступности, что делает его хорошо подходящим для исследований фенотипирования в полевом масштабе. Данные облаков точек полей культур были сгенерированы с использованием программного обеспечения Pix4Dmapper 4.5.6 для 3D-реконструкции, обработаны с использованием библиотеки облаков точек на C++ (PCL 1.8.0) и визуализированы с помощью MeshLab 1.3.2 и CloudCompare 2.9.0. Программное обеспечение Pix4Dmapper 4.5.6 было настроено с определенными параметрами для обеспечения высококачественной 3D-реконструкции:
(1) Настройки выравнивания изображений: Настройки выравнивания были установлены на «Высокий» для обеспечения точного обнаружения признаков и сопоставления между перекрывающимися изображениями с БПЛА. «Масштаб изображения ключевых точек» был установлен на 1 (полное разрешение изображения) для улучшенной точности выравнивания;
(2) Разрешение реконструкции: «Масштаб изображения» для реконструкции плотного облака точек был установлен на «Полный масштаб» для использования исходного разрешения изображения и повышения уровня детализации в результирующем облаке точек;
(3) Сгущение облака точек: Параметр «Качество сгущения» был установлен на «Высокий» для увеличения плотности облака точек, захватывая мелкие детали структур полога кукурузы;
(4) Фильтрация шума: Фильтрация шума была включена с настройкой «Агрессивный» для минимизации нерелевантных или ошибочных точек, вызванных факторами окружающей среды, такими как тени и изменения освещения;
(5) Наземные контрольные точки (GCP): GCP использовались для точной геопривязки данных и были равномерно распределены по району исследования. Точность позиционирования GCP составляла ±1 см;
(6) Выходная система координат: Система координат была установлена на WGS84/UTM Зона 50 N для согласования данных со стандартными геопространственными референсными системами для дальнейшего анализа.
Эти конфигурации параметров были тщательно подобраны для баланса между эффективностью обработки и точностью реконструкции, обеспечивая генерацию высококачественных данных облаков точек для полевого анализа популяции кукурузы.
2.3. Данные облака точек
Облако точек — это обширная коллекция точек информации о поверхности объекта, которая обычно получается с использованием мультивидовой геометрии или лазерной технологии. Данные облака точек могут точно отображать фактическое состояние земной поверхности, включая отражательные характеристики наземных объектов и состояние грунта. Основываясь на методе 3D-реконструкции мультивидовой геометрии, мы смогли сгенерировать данные облака точек популяции кукурузы в полевом масштабе для этого исследования. Данные облака точек включают информацию о трехмерных координатах (X, Y, Z), информацию о цвете (RGB) и информацию об интенсивности (Intensity).
2.4. Получение изображений и измерение высоты растений в популяциях кукурузы
В этом исследовании DJI Phantom 4 Pro, включая дрон, пульт дистанционного управления и 20-мегапиксельную КМОП-камеру, использовался для получения мультиракурсной последовательности изображений популяции кукурузы в полевых условиях с разрешением 6000 × 4000. БПЛА использовал планирование полета по крестообразной траектории для сбора наклонных данных в четырех направлениях и обеспечения того, чтобы область перекрытия между двумя соседними фотографиями составляла 70–80% для более полного захвата 3D-информации о кукурузе (Рисунок 2). Каждая красная точка на (a) обозначает фотографию, сделанную с маршрута полета БПЛА, в то время как (b) указывает угол и место съемки изображения. Выбор перекрытия изображений 70–80% был основан на его доказанной эффективности в улучшении точности 3D-реконструкции, особенно в условиях плотного полога:
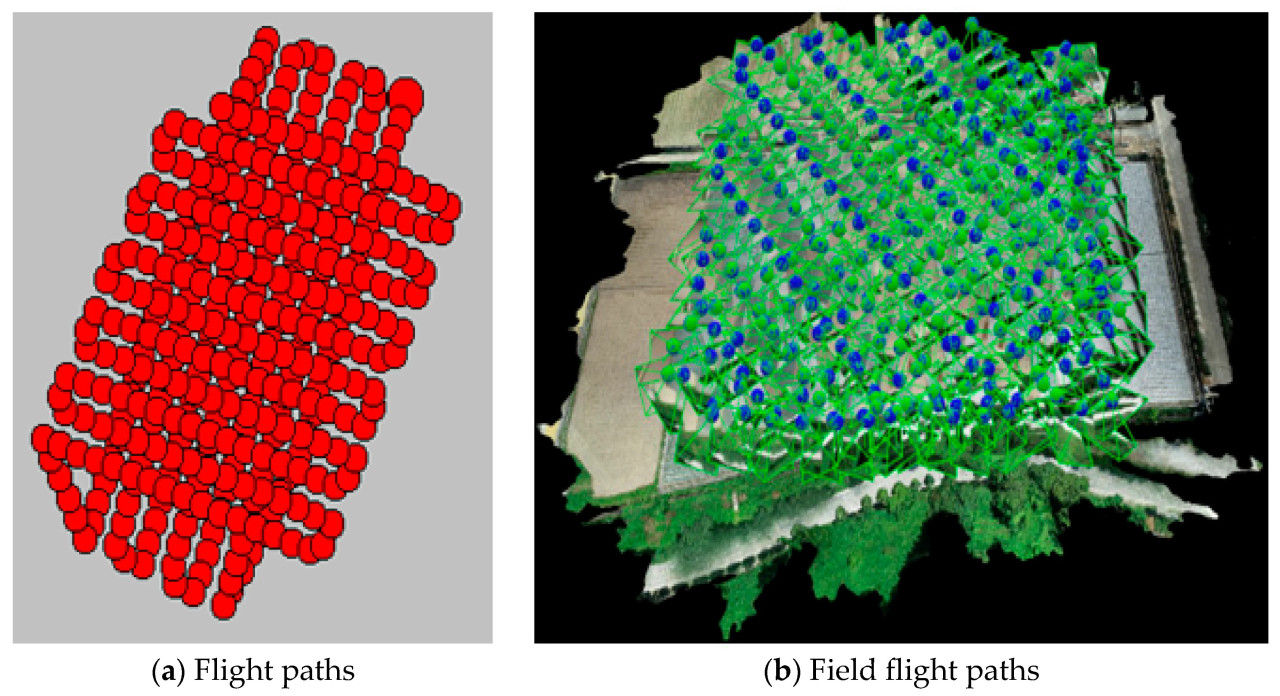
Рисунок 2. Схема планирования полета БПЛА.
(1) Улучшенное сопоставление признаков: Высокий процент перекрытия гарантирует, что достаточное количество общих характерных точек будет обнаружено на соседних изображениях. Это улучшает точность выравнивания в процессе «структура из движения» (SfM), что приводит к более надежной реконструкции полога кукурузы;
(2) Улучшенная пространственная согласованность: Уровни перекрытия 70–80% уменьшают пробелы или несоответствия в данных облака точек, особенно в областях со сложными структурами, такими как перекрывающиеся листья или изменяющаяся высота полога. Это обеспечивает более непрерывное и детальное представление поля;
(3) Минимизация ошибок реконструкции: В случаях меньшего перекрытия ключевые области могут быть недостаточно представлены, что приводит к неполной реконструкции или ошибкам в плотных областях. Поддержание перекрытия 70–80% позволяет программному обеспечению (Pix4Dmapper) лучше справляться с изменениями освещения, перспективы и текстуры по всему полю, уменьшая потенциальный шум в результирующей 3D-модели;
(4) Балансирование эффективности обработки: Хотя более высокие проценты перекрытия (например, выше 80%) теоретически могут улучшить точность, они значительно увеличивают объем хранимых данных и время обработки. Перекрытие 70–80% обеспечивает баланс между достижением высокой точности и поддержанием разумных вычислительных требований.
Эта конфигурация перекрытия широко применяется в исследованиях 3D-реконструкции на базе БПЛА и была проверена в аналогичных сельскохозяйственных приложениях. Полученное в этом исследовании облако точек достигло достаточной плотности и точности для точного измерения высоты растений и анализа популяций кукурузы.
2.5. Сегментация облака точек для популяций кукурузы
2.5.1. Алгоритм наращивания областей
Чтобы сформировать целостную область, алгоритм наращивания областей сначала определяет затравочные точки, а затем постепенно объединяет точки в окрестности со схожими характеристиками. Нормали и кривизны вычисляются и сортируются по возрастанию кривизны. Соседние точки сравниваются, и точка с наименьшей кривизной выбирается в качестве начальной затравочной. Устанавливается порог угла нормали, и добавляются подходящие соседние точки. Устанавливается порог кривизны, и рост продолжается, пока все точки не будут обработаны. Алгоритм ограничивающей оболочки использует простые геометрии (такие как AABB, ограничивающая сфера и OBB) для аппроксимации сложных объектов. Минимальный гексаэдр, используемый для представления AABB, имеет простую структуру, но он неприменим для сложных форм, особенно когда его необходимо пересчитывать во время вращения.
2.5.2. Алгоритм приближенной сегментации пространства столбцов
Для извлечения облака точек отдельного растения кукурузы и определения его высоты мы предлагаем в этой работе подход приближенной сегментации пространства столбцов, который объединяет алгоритм пространства столбцов с сегментацией AABB ограничивающей рамкой. Чтобы удалить облако точек листьев и сохранить облако точек стебля, сначала определяется угол между вектором нормали облака точек и горизонтальным направлением. Затем высота отдельного растения оценивается путем сегментации облака точек стебля с помощью AABB ограничивающей рамки. Конкретный процесс показан на Рисунке 3.
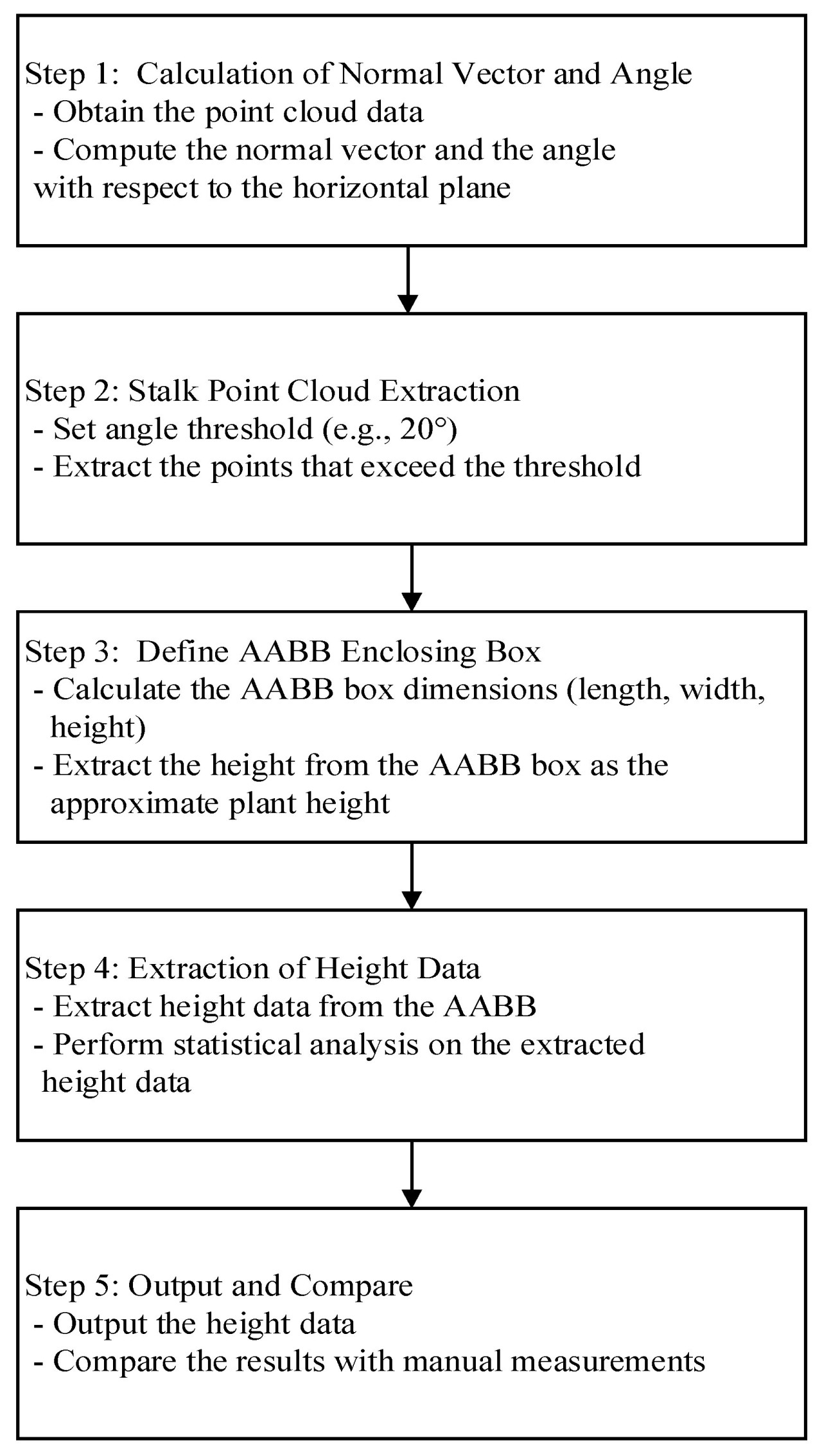
Рисунок 3. Блок-схема оценки высоты одного растения кукурузы на основе сегментации пространства столбцов.
Этапы следующие. Определить угол между вектором нормали облака точек и горизонтальным направлением. Установить порог угла для извлечения облака точек стебля. Установить ширину и длину AABB ограничивающей рамки для получения данных о высоте и использовать длину ограничивающей рамки для вычисления высоты отдельного растения. Как ошибочная, так и чрезмерная сегментация успешно уменьшаются с помощью этого метода.
В трехмерном пространстве векторы нормали листьев и стеблей сельскохозяйственных культур различаются, и сегментации можно достичь, регулируя угол векторов нормали. Векторы нормали должны быть вычислены из трехмерных координат, в то время как данные облака точек популяции кукурузы реконструируются из последовательностей изображений, которые содержат цветовую информацию и трехмерные координаты. Чтобы аппроксимировать векторы нормали поверхности и обеспечить базовую поддержку данных для сегментации, оценка нормали подгоняет локальную поверхность облака точек к плоскости и выводит нормали, используя метод наименьших квадратов. Предполагается, что уравнение плоскости имеет вид

где cosα, cosβ и cosγ — косинусы направления вектора нормали в точке (x, y, z) на плоскости, а |p| — расстояние от начала координат до плоскости. Нахождение уравнения плоскости преобразуется в нахождение четырех параметров a, b, c и d.
2.6. Предварительная обработка облака точек и анализ сегментации для популяций кукурузы
Облако точек популяции кукурузы было предварительно обработано и сегментировано в этом исследовании с использованием конфигурации библиотеки облаков точек (PCL) [21]. Сбор облака точек, фильтрация, сегментация, поиск, извлечение признаков и визуализация часто реализуются с помощью PCL — кроссплатформенной шаблонной библиотеки облаков точек на C++ с открытым исходным кодом, работающей в операционной системе Robot.
2.6.1. Результаты предварительной обработки облака точек популяции кукурузы
В этом исследовании мы выполнили предварительную обработку облака точек популяции кукурузы, которая включала понижающую дискретизацию, статистическую фильтрацию, построение kd-дерева и визуализацию. Рисунок 4 иллюстрирует различные этапы предварительной обработки, примененные к облаку точек популяции кукурузы, полученному из одного тестового набора. Серия рисунков показывает трансформацию данных облака точек через различные этапы, как описано ниже. Рисунок 4a представляет частичный вид крупномасштабного полевого облака точек, сгенерированного с использованием программного обеспечения CloudCompare 2.9.0. Это исходные, необработанные данные облака точек до какой-либо фильтрации или обработки, предоставляющие обзор всего набора данных. Рисунок 4b изображает целевое облако точек кукурузы, извлеченное из поля. Это уточненная версия облака точек, сфокусированная конкретно на популяции кукурузы путем фильтрации нерелевантной фоновой информации. Рисунок 4c показывает облако точек после удаления наземных точек, оставляя только точки, связанные с популяцией кукурузы. Облако точек содержит 6 122 494 точки, представляя набор данных после удаления земли и указывая на начальную очистку данных. Рисунок 4d отображает облако точек после применения статистической фильтрации. Статистическая фильтрация уменьшает шум и удаляет нерелевантные точки, что приводит к более точному набору данных. Обработанное облако точек содержит 5 361 509 точек. Рисунок 4e представляет окончательное облако точек после понижающей дискретизации, которая уменьшает количество точек до 29 939. Процесс понижающей дискретизации делает набор данных более управляемым для дальнейшего анализа, сохраняя при этом ключевые особенности популяции кукурузы.
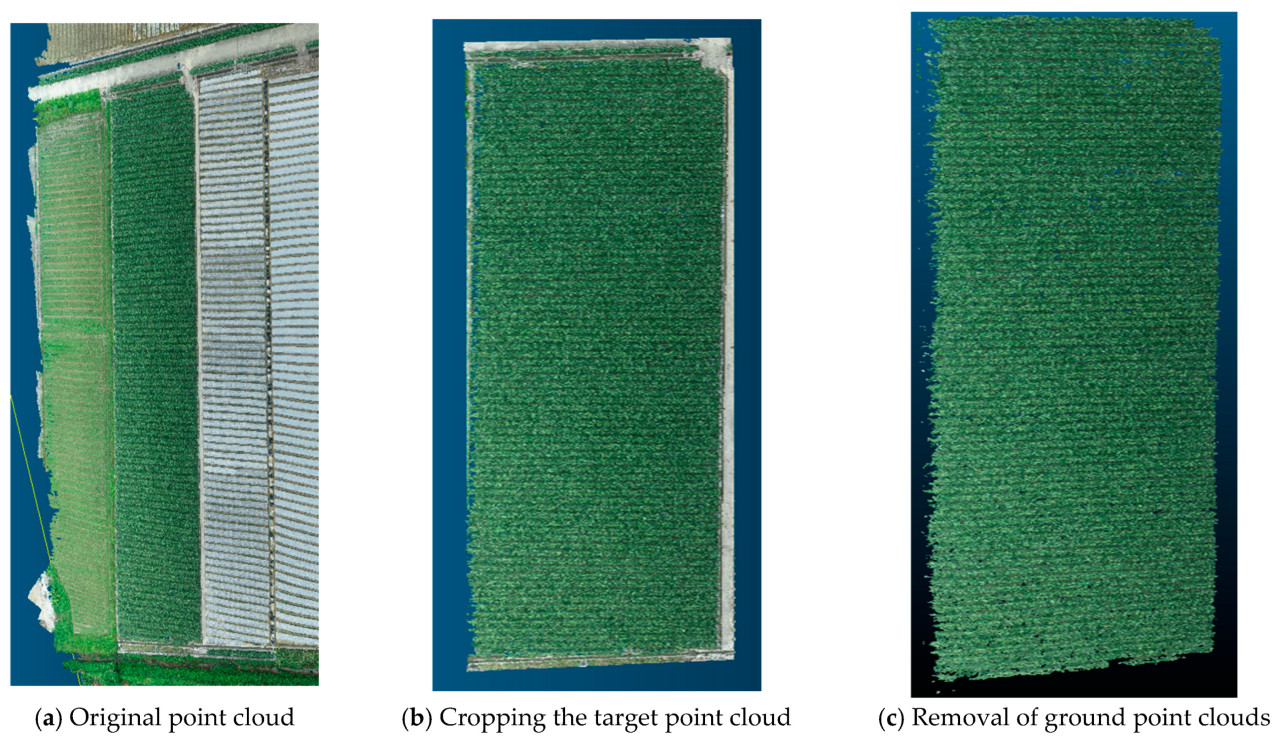
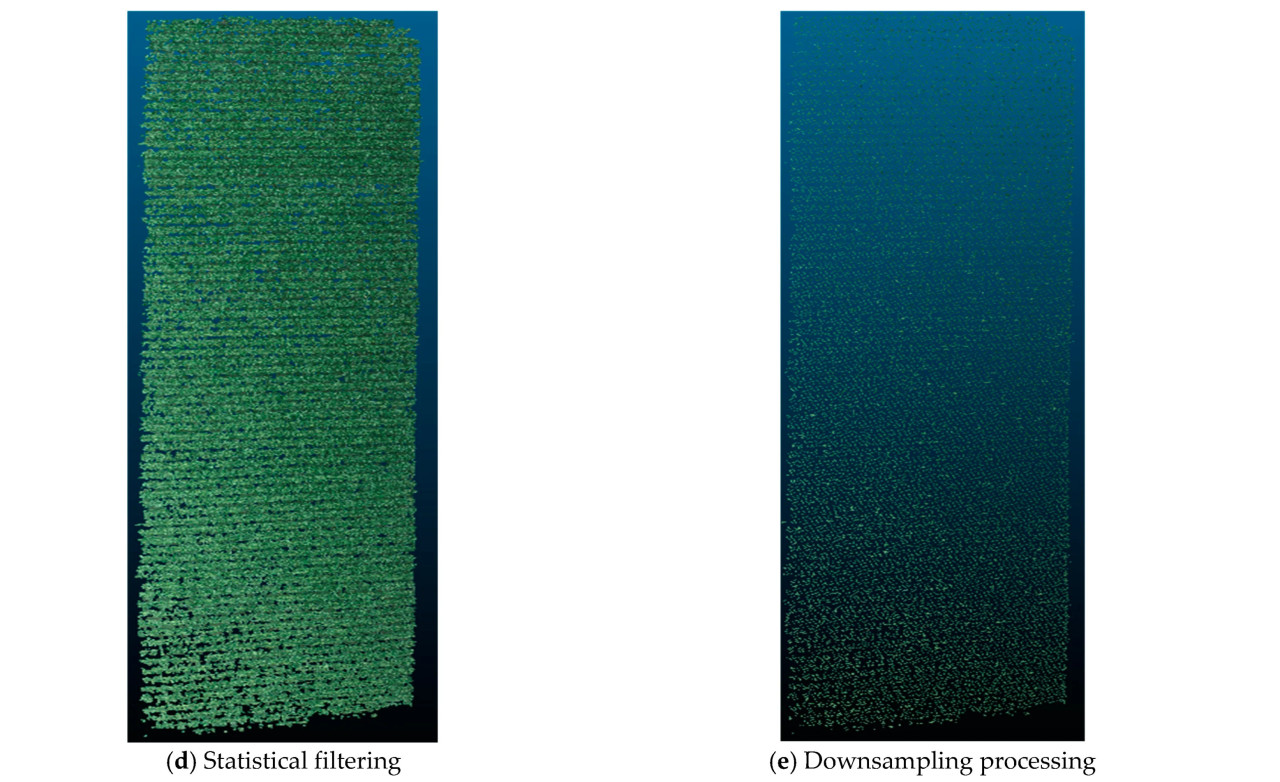
Рисунок 4. Предварительная обработка облака точек.
Каждый рисунок представляет отдельный этап в конвейере предварительной обработки, наглядно демонстрируя эволюцию облака точек в процессе различных трансформаций. Эти шаги значительно улучшают качество и удобство использования облака точек популяции кукурузы для последующего анализа.
2.6.2. Методы предварительной обработки и сегментации облака точек
В этом исследовании данные облака точек проростков кукурузы были предварительно обработаны и сегментированы с использованием двух основных методов: алгоритма наращивания областей на основе цвета и приближенного алгоритма сегментации пространства столбцов. Эти этапы были критически важны для разделения отдельных растений и подготовки данных для последующего анализа.
Данные облака точек сначала обрабатывались с использованием алгоритма наращивания областей на основе цвета для сегментации проростков кукурузы на отдельные растения. Были установлены ключевые параметры, такие как порог расстояния, порог цвета, а также минимальное и максимальное количество точек в кластере. Алгоритм показал хорошую производительность в более простых сценариях, достигая четкой сегментации отдельных растений. Однако в условиях плотной посадки или затенения результаты сегментации были менее эффективными, что требовало дополнительной настройки параметров.
Угол направления каждой точки в облаке точек вычислялся путем анализа угла между вектором нормали точки и горизонтальной плоскостью. Этот анализ помог изолировать точки стебля от точек листьев. Точки с углом направления между 1 и 2 радианами сохранялись как часть стебля, в то время как остальные исключались. Этот подход, основанный на пороговом значении, эффективно разделял облака точек стебля, позволяя более точно извлекать высоту растений.
Чтобы устранить ограничения алгоритма наращивания областей в условиях плотного поля, был разработан приближенный алгоритм сегментации пространства столбцов. Этот метод объединил подход сегментации пространства столбцов с методом ограничивающей рамки, выровненной по осям (AABB), для аппроксимации сегментации отдельных растений. Регулируя длину ребер ограничивающих рамок, алгоритм обеспечивал эффективную сегментацию облака точек на отдельные растения. Этот метод особенно подходит для оценки высоты растений в полевом масштабе, несмотря на проблемы перекрывающихся растений и затенения в плотных пологах.
2.7. Методы измерения высоты растений и валидации
2.7.1. Измерение высоты растений в популяциях кукурузы
В этом исследовании была достигнута приближенная сегментация отдельных растений облака точек популяции кукурузы, как описано в предыдущих разделах. Расчет высоты отдельного растения кукурузы из сегментированного облака точек требовал только пакетного извлечения с использованием алгоритма AABB (выровненная по осям ограничивающая рамка) ограничивающей оболочки. Алгоритм пакетного извлечения высоты был реализован в VS2017 с использованием C++ для реализации функциональности кода. Блок-схема процесса извлечения высоты показана на Рисунке 5.
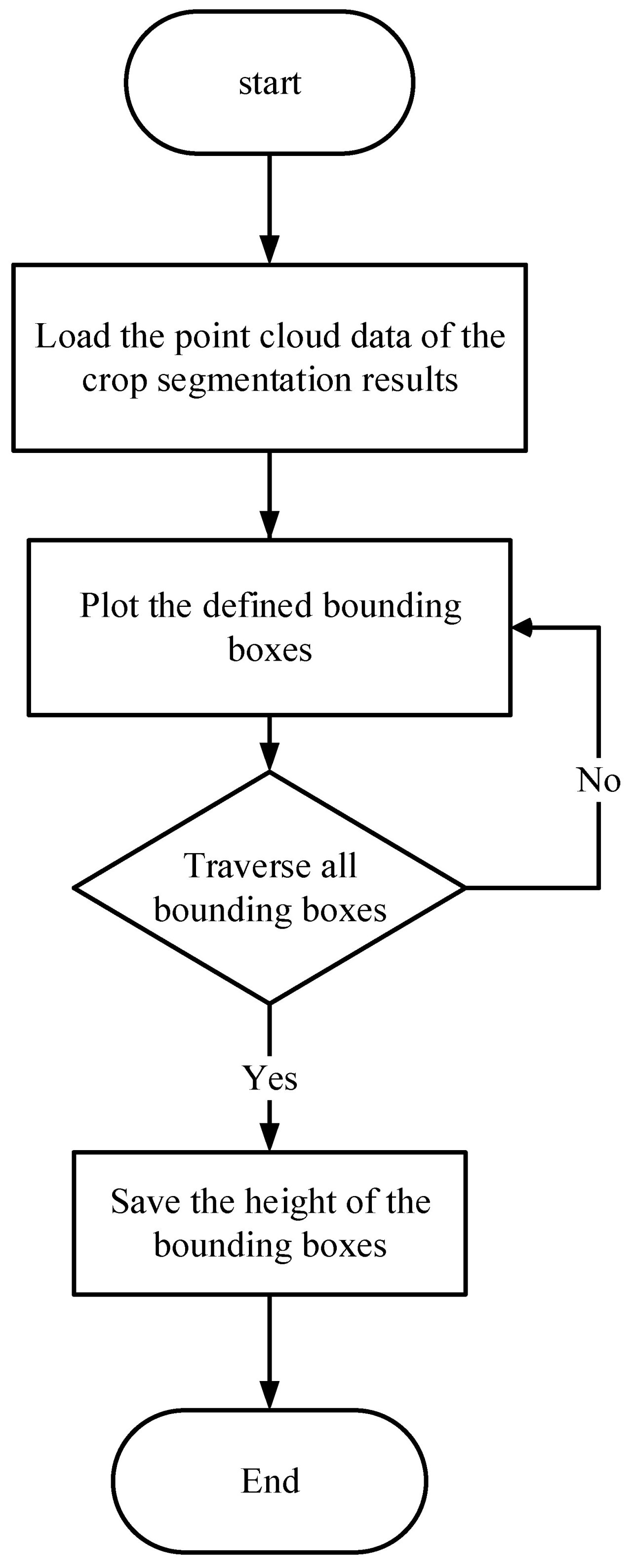
Рисунок 5. Блок-схема извлечения высоты.
2.7.2. Валидация измеренных данных
Из-за большого количества растений кукурузы в поле измерять высоту каждого растения вручную было непрактично. Для проверки точности извлеченных данных о высоте из облака точек это исследование сравнило извлеченные данные отдельных растений с данными ручных измерений высоты. Процесс валидации включал следующие этапы:
(1) Сортировка и анализ согласованности кривых: Оба набора данных, извлеченные данные о высоте из облака точек и данные ручных измерений высоты, были отсортированы от низкого к высокому. Отсортированные данные затем были нанесены на график кривой для наблюдения за согласованностью их паттернов;
(2) Определение и расчет полярного отклонения: Полярное отклонение было определено как метрика для количественной оценки различий между соответствующими значениями высоты в наборе данных облака точек и наборе данных ручных измерений. Оно предоставляет нормализованную меру различий, позволяя проводить сравнение между наборами данных с различными диапазонами и распределениями. Если кривые были согласованы, рассчитывалось полярное отклонение для оценки степени сходства между двумя наборами данных. Если кривые были несогласованны, приподнятые части кривой сегментировались для отдельных расчетов полярного отклонения;
(3) Дальнейший анализ на основе полярного отклонения: Если полярное отклонение было близким (указывая на высокую степень сходства), средняя высота обоих наборов данных вычислялась в одних и тех же единицах. Если полярное отклонение значительно различалось, отклонение анализировалось кратно единицам;
(4) Корреляционный анализ: Для случаев, когда набор данных облака точек содержал больше точек данных, чем набор данных ручных измерений, средние высоты вычислялись в кратных единицах. Корреляционные точки между двумя наборами данных, которые относились к ненулевым значениям в пределах одного интервала единиц, были извлечены. После объединения пустых строк вычисления повторялись. Этот процесс продолжался до тех пор, пока не оставалось дальнейших корреляционных точек.
Анализ пяти тестовых наборов данных показал, что крайние различия между данными о высоте из облака точек и данными ручных измерений были минимальны. Более того, средние высоты, вычисленные в одних и тех же единицах, показали высокую степень согласованности. Эти результаты подтвердили осуществимость и точность метода извлечения высоты популяции кукурузы с использованием полярного отклонения в качестве метрики для оценки и количественной оценки согласованности между наборами данных. Этот метод, основанный на мультивидовой геометрической 3D-реконструкции в полевом масштабе, обеспечивает эффективную методологическую поддержку для высокопроизводительного мониторинга фенотипов сельскохозяйственных культур.
3. Результаты и обсуждение
3.1. Оценка высоты растений в популяциях кукурузы
3.1.1. Анализ сегментации наращиванием областей в облаках точек популяций проростков кукурузы
Сегментация популяции кукурузы была достигнута с использованием алгоритма наращивания областей на основе цвета. Ключевые параметры, такие как порог расстояния, порог цвета и минимальное и максимальное количество точек в кластере, были установлены. Рисунок 6 представляет вид сверху на результаты сегментации для эксперимента f и эксперимента g. В опыте f сегментация успешно изолировала облака точек отдельных растений, достигнув четких границ. Напротив, опыт g показал плохую сегментацию из-за затенения растений. При определенных обстоятельствах эффект сегментации может быть улучшен путем регулировки пороговых значений. На Рисунке 6 разные цвета представляют различные растения или кластеры растений в процессе сегментации. В Эксперименте f, где сегментация была успешной, облака точек отдельных растений были четко разделены, причем каждому растению был присвоен отдельный цвет. В Эксперименте g из-за затенения растений сегментация была неоптимальной, что привело к тому, что несколько растений или кластеров были ошибочно сгруппированы под одним цветом, что привело к нечетким границам.
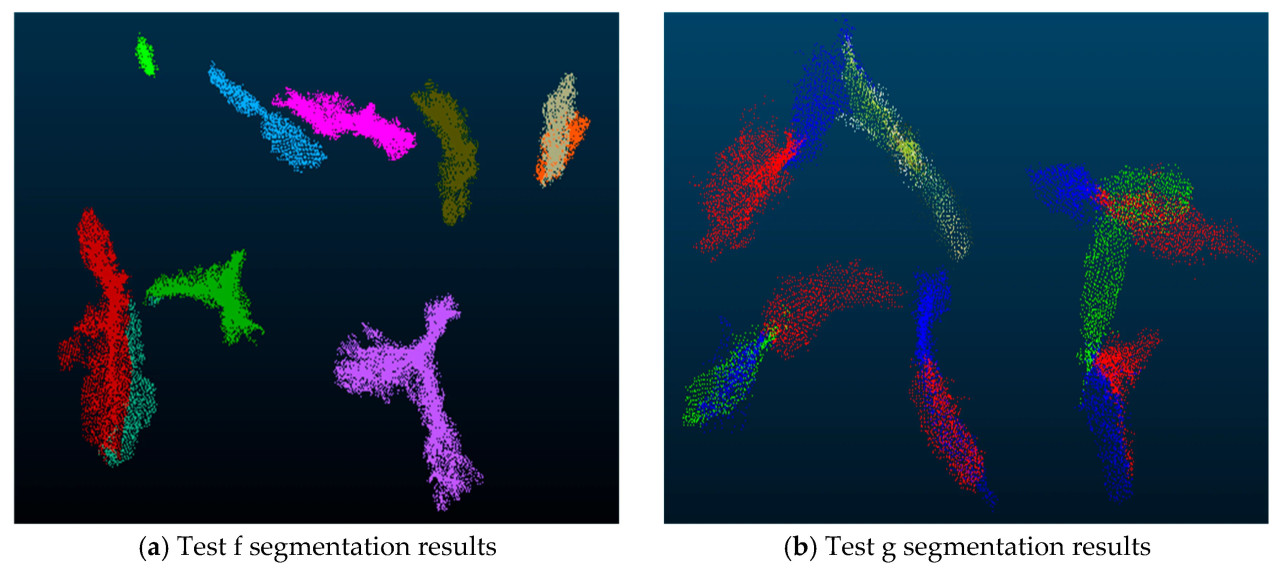
Рисунок 6. Эффект сегментации алгоритма.
Дальнейшие особенности сегментации для отдельных растений кукурузы наблюдались, как показано на Рисунке 7. Путем настройки ключевых параметров, Рисунок 7a иллюстрирует сценарий, где кластеры отдельных растений соответствуют изолированным монокультурам с оптимальной сегментацией. На Рисунке 7b несколько кластеров необходимо было объединить, чтобы представить отдельные растения. В случаях, когда кластеры отдельных растений не были достигнуты, облака точек объединялись вручную с использованием программного обеспечения CloudCompare для улучшения качества сегментации. На Рисунке 7 различные цвета используются для представления разных кластеров растений кукурузы, где каждый цвет соответствует отдельному растению или группе растений, идентифицированных алгоритмом сегментации. На Рисунке 7a каждому отдельному растению кукурузы присвоен уникальный цвет, что указывает на успешную сегментацию, где растения изолированы, с четкими границами между ними. На Рисунке 7b несколько кластеров растений были ошибочно объединены в один цвет из-за затенения или сходства в данных облака точек, что привело к размытым границам и неоптимальным результатам сегментации.
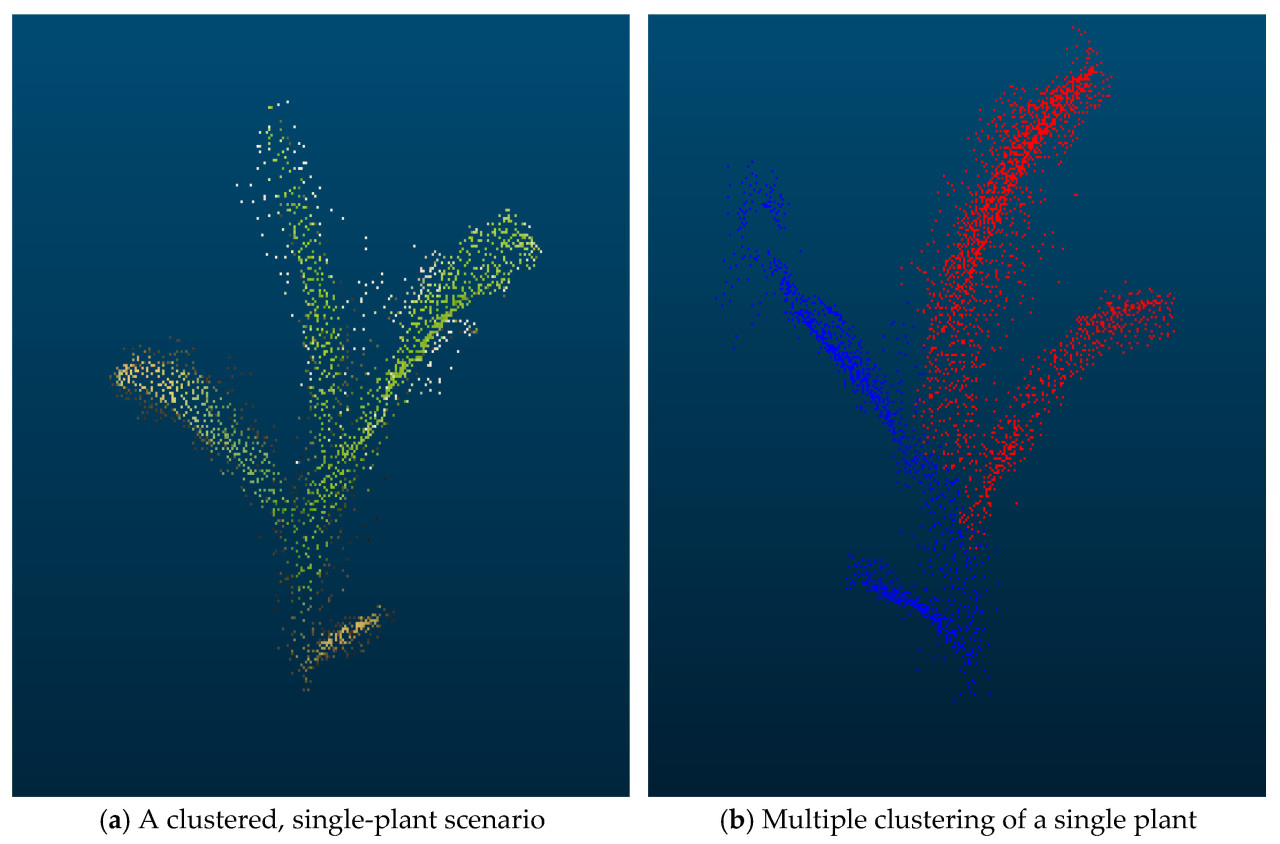
Рисунок 7. Кластеризация различных экспериментальных монокультур.
3.1.2. Влияние длины стороны AABB ограничивающей рамки на оценку высоты
Чтобы изучить влияние длины стороны AABB ограничивающей рамки на сегментацию облака точек монокультур кукурузы, в этом исследовании были проведены эксперименты с длинами сторон, установленными на один, два, пять и максимальное значение соответственно, и подсчитаны извлеченные данные о высоте (Таблица 2). Результаты показывают, что по мере уменьшения длины стороны общее количество извлеченных ограничивающих рамок увеличивается, а значения максимальной, минимальной и средней высоты уменьшаются. И наоборот, по мере увеличения длины стороны количество извлеченных ограничивающих рамок уменьшается, а значения высоты увеличиваются. Если длина стороны слишком мала, исходное облако точек одного растения чрезмерно разделяется, что приводит к низким извлеченным высотам. Если длина стороны слишком велика, облака точек нескольких растений сливаются, что приводит к более высоким извлеченным высотам.
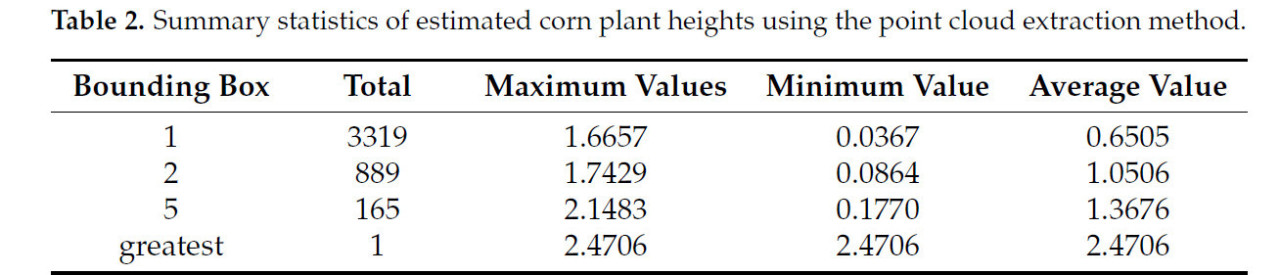
Таблица 2. Сводная статистика расчетной высоты растений кукурузы с использованием метода извлечения из облака точек.
Рисунок 8 показывает гистограммы высоты кукурузы, извлеченной с использованием ограничивающих рамок с длиной ребра один, два и пять. Гистограммы указывают на то, что извлеченные высоты с разной длиной сторон демонстрируют схожие паттерны кривых, но распределение и частота значений различаются. Когда длина стороны равна двум, диапазон извлеченных высот более точно соответствует количеству отдельных растений в поле, поскольку она может приблизительно охватывать облако точек одного растения. Это приводит к тому, что извлеченные высоты лучше моделируют фактическую высоту растений кукурузы. Поэтому в последующих исследованиях длина ребра AABB ограничивающей рамки была единообразно установлена равной двум для обеспечения обоснованности и точности результатов.
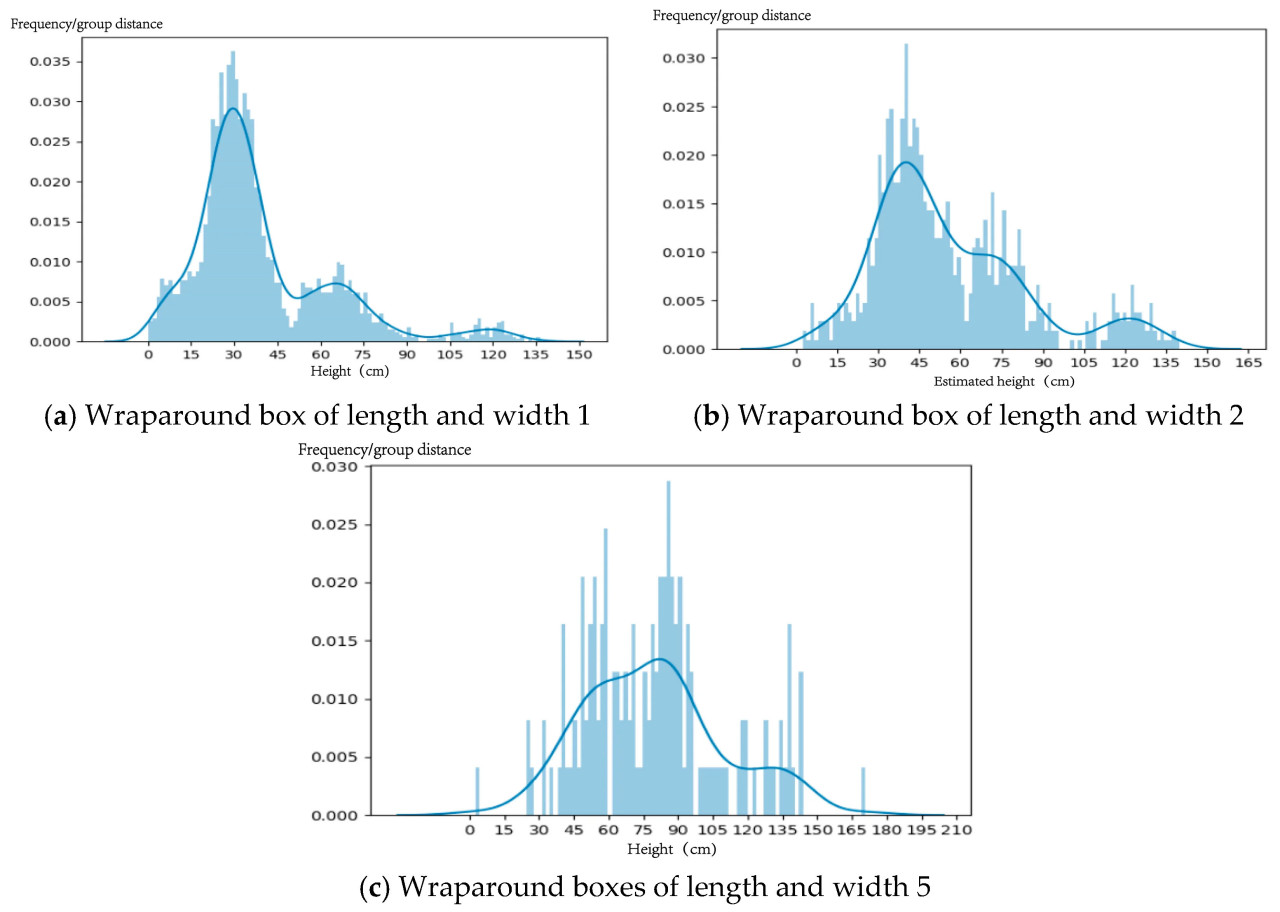
Рисунок 8. Гистограмма расчетной высоты растений кукурузы с использованием метода извлечения из облака точек для ограничивающих рамок разного размера.
3.1.3. Анализ вектора нормали и приближенный алгоритм сегментации пространства столбцов
Приближенный алгоритм сегментации пространства столбцов был применен для сегментации стеблей кукурузы из облака точек и повышения точности оценки высоты. Путем анализа векторов нормали точки с углами направления между одним и двумя радианами были идентифицированы как точки стебля, эффективно исключая точки листьев и нерелевантные данные.
Рисунок 9 представляет гистограмму распределения углов направления, где горизонтальная координата представляет угол в радианах и показывает распределение, близкое к нормальному. Основываясь на этих порогах, Рисунок 10 иллюстрирует сегментированное облако точек с сохраненными точками стебля. Рисунок 10a предоставляет общий вид, в то время как Рисунки 10b и 10c показывают детальные увеличенные изображения.
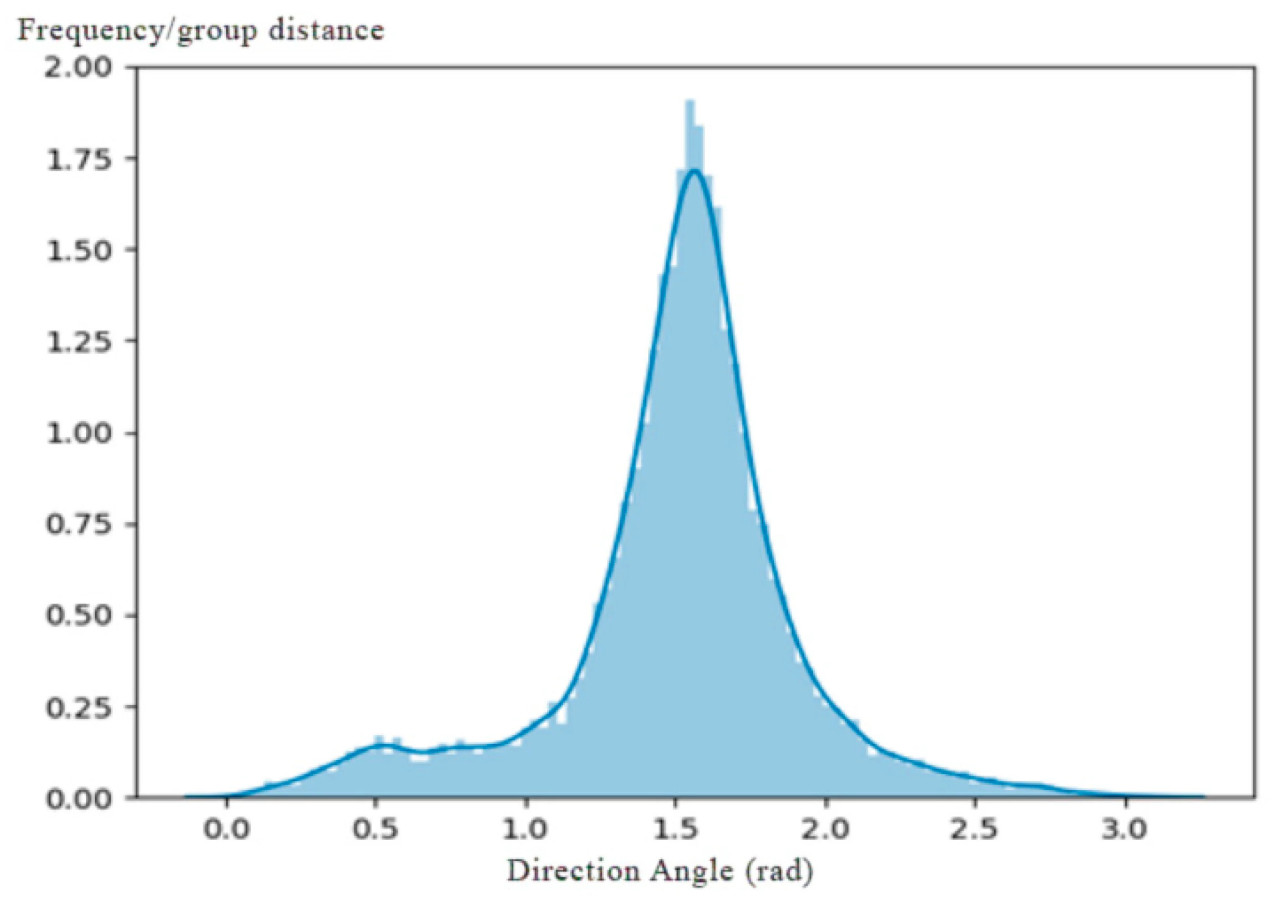
Рисунок 9. Гистограмма угла направления.
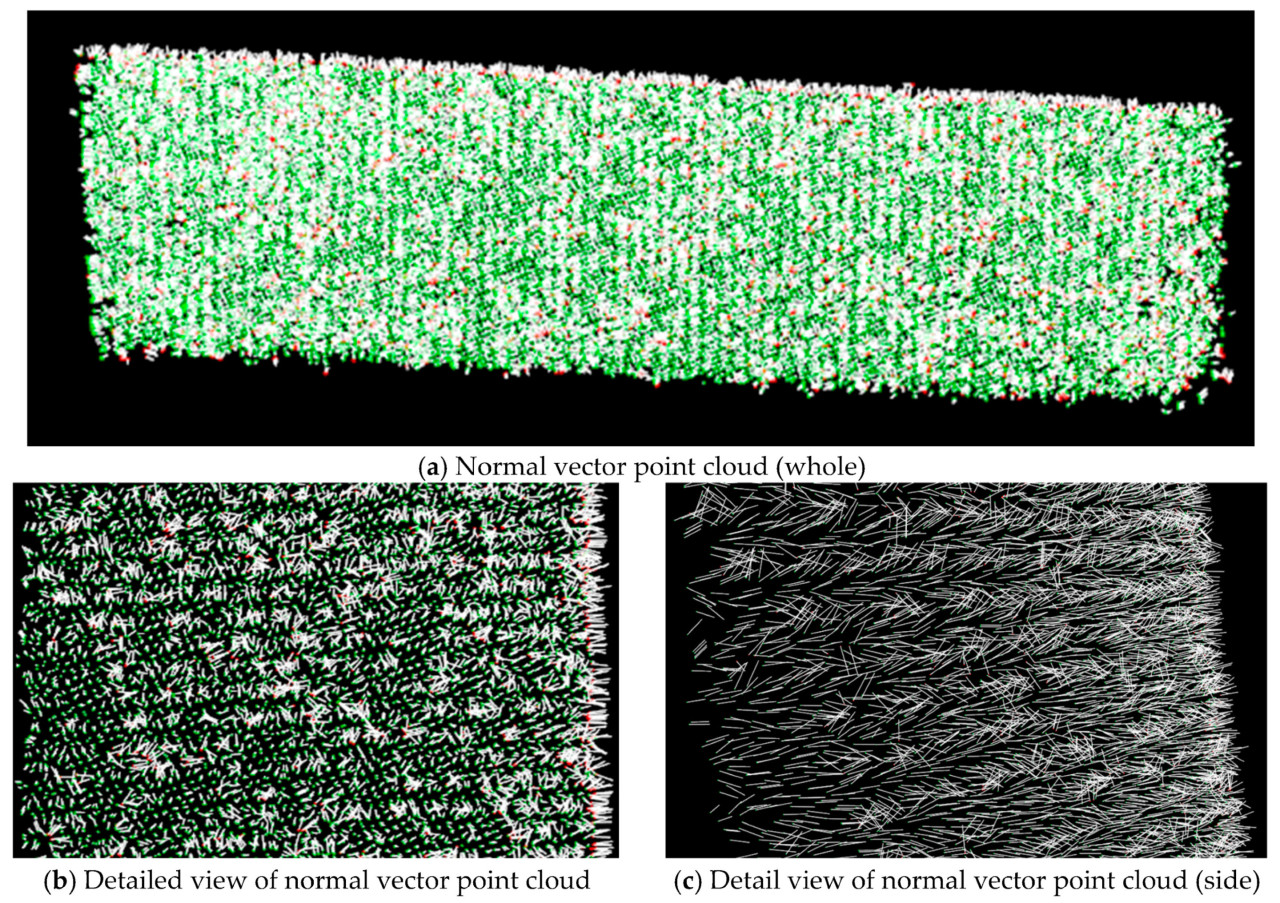
Рисунок 10. Карта облака точек векторов нормали.
Используя подход аппроксимации пространства столбцов в сочетании с сегментацией AABB, были извлечены облака точек отдельных растений для последующих измерений высоты. Рисунок 11 демонстрирует этот процесс сегментации, при этом Рисунок 11c показывает области отдельных растений после сегментации. Этот алгоритм сегментации был особенно эффективен в плотных пологах с перекрывающимися растениями, достигая высокой точности при изоляции отдельных стеблей кукурузы.
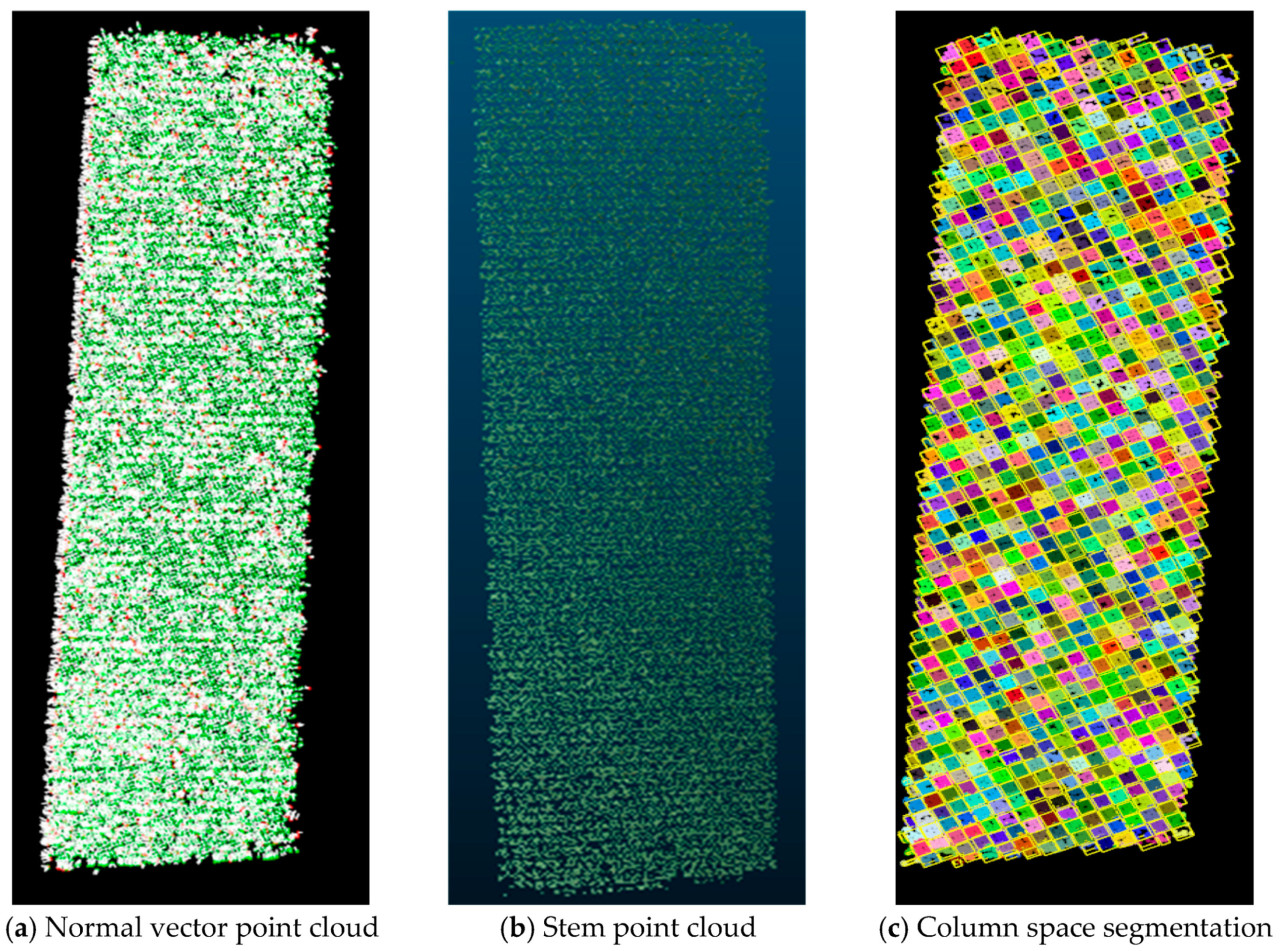
Рисунок 11. Пример диаграммы алгоритма пространства столбцов.
3.1.4. Распределение извлеченных высот
В этом исследовании популяционное облако точек было сегментировано на AABB ограничивающие рамки, содержащие облака точек отдельных растений, и их высоты были извлечены. Для статистического анализа и сравнительной валидации извлеченные данные о высоте были умножены на 100 для перевода измерений в сантиметры. Эксперимент состоял из пяти групп, а именно a, b, c, d и e, с соответствующими количествами извлеченных данных о высоте: 765, 775, 805, 875 и 889 соответственно.
Коробчатая диаграмма использовалась для описания распределения данных для каждого теста. Коробчатые диаграммы показывают общее распределение данных через статистики, такие как медиана, квартили, верхняя и нижняя границы, и идентифицируют выбросы (если присутствуют). Как показано на Рисунке 12, извлеченные данные о высоте для опытов a, b и c распределены между 0 и 150 см. Опыты b и c имеют данные, сконцентрированные между 0 и 125 см, опыт d — между 0 и 150 см, а опыт e — между 0 и 175 см. Отсутствие выбросов свидетельствует о высоком качестве извлеченного облака точек. Выбросы, когда они присутствуют, могут быть вызваны отсутствием облака точек на границах (если они меньше нижней границы) или очень небольшим количеством исключительно высоких растений (если они больше верхней границы). На коробчатой диаграмме: Треугольники: Представляют выбросы, т.е. точки данных вне диапазона коробки, либо выше верхней границы, либо ниже нижней границы. Это могут быть экстремальные значения, обусловленные ошибками данных или исключительными случаями; Линии: «Линии» на коробчатой диаграмме представляют верхний и нижний квартили (границы коробки) и медиану (обычно горизонтальная линия).
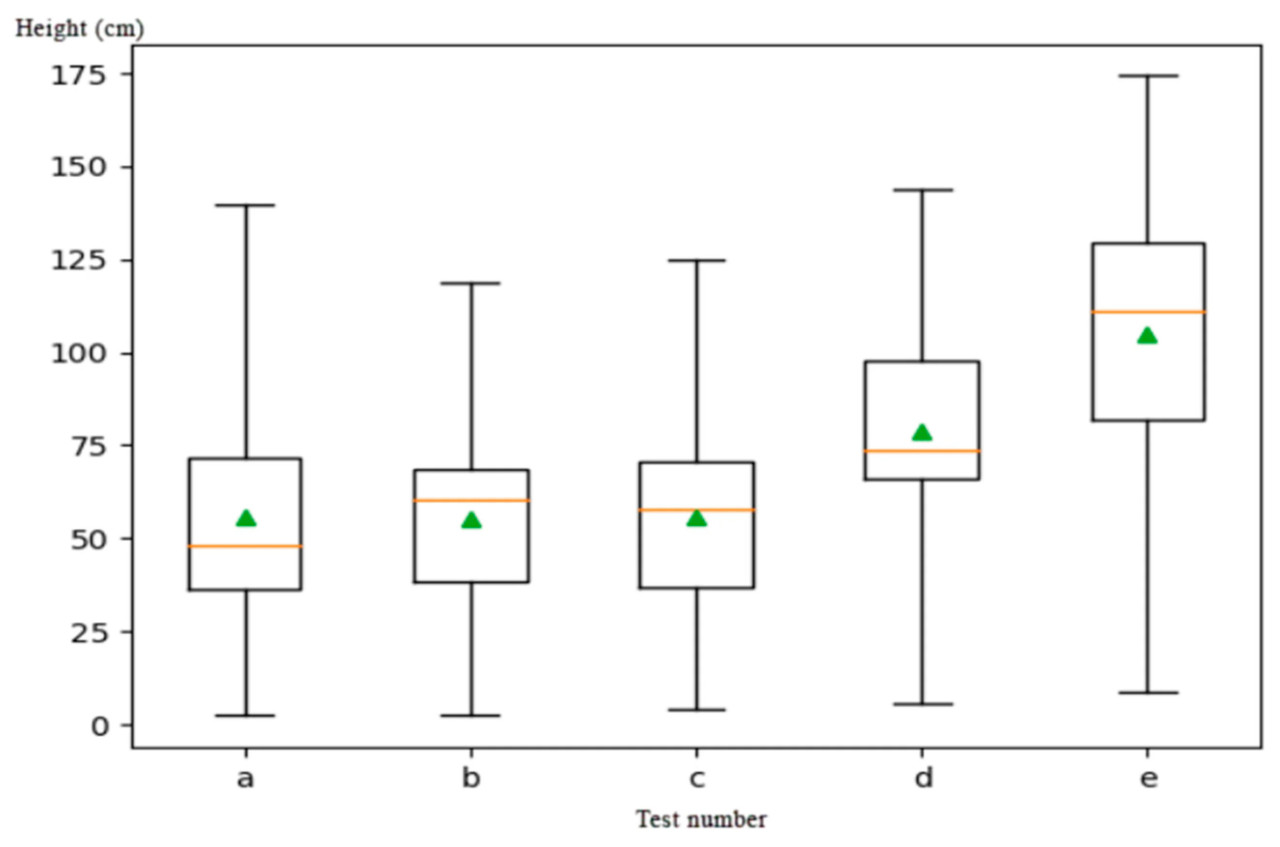
Рисунок 12. Коробчатая диаграмма расчетных данных о высоте для каждого теста.
Статистика в Таблице 3 показывает, что средняя высота опытов a, b и c составляла около 55 см, опыта d — около 78 см, а опыта e — около 105 см. Эти результаты отражают различия в периодах вегетации кукурузы. Опыты a, b и c имели схожие стадии роста. Опыт d был более поздним, а опыт e — самым поздним, что согласуется с фактической ситуацией роста. Гистограмма (Рисунок 13) была построена с использованием пяти наборов данных, выявив отчетливые различия в распределениях высоты кукурузы по группам. Опыт a был сконцентрирован на 30 см и 75 см, опыт b — на 37 см и 70 см, опыт c — на 40 см и 70 см, опыт d — на 75 см и 112 см, а опыт e — на 75–150 см.
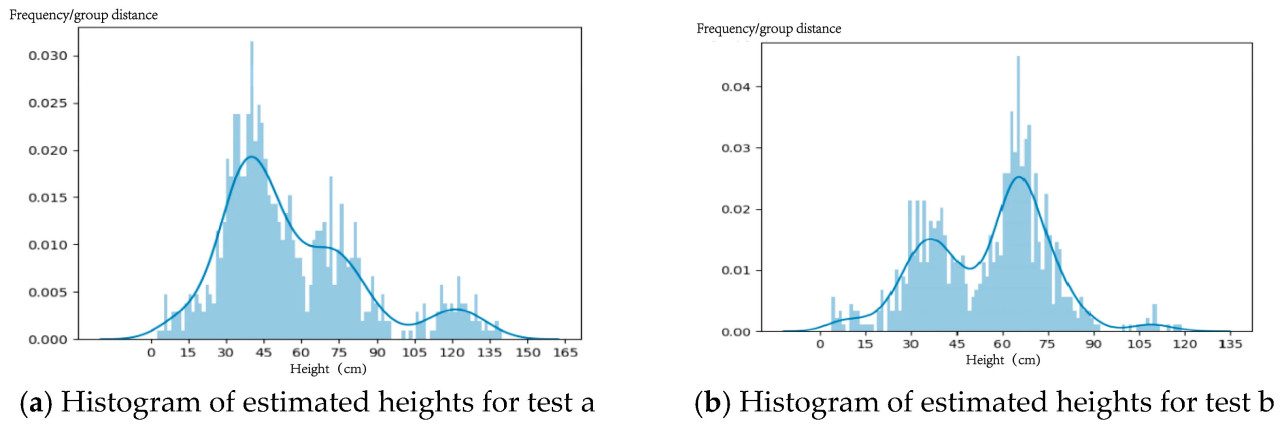
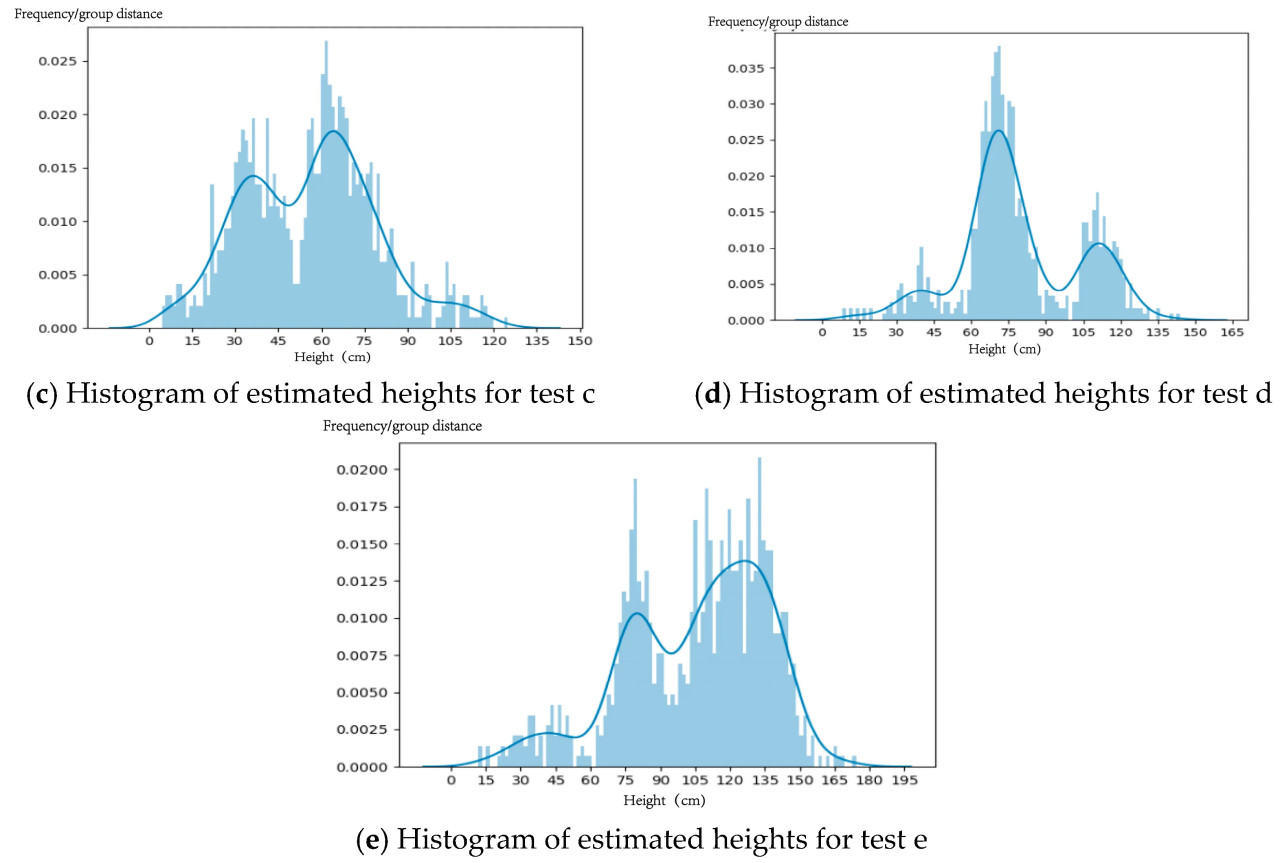
Рисунок 13. Гистограмма расчетных данных о высоте растений кукурузы для пяти наборов тестов с использованием метода извлечения из облака точек. Высоты для каждого теста (a–e) были получены из обработанных данных облака точек, сгенерированных методом мультивидовой реконструкции.
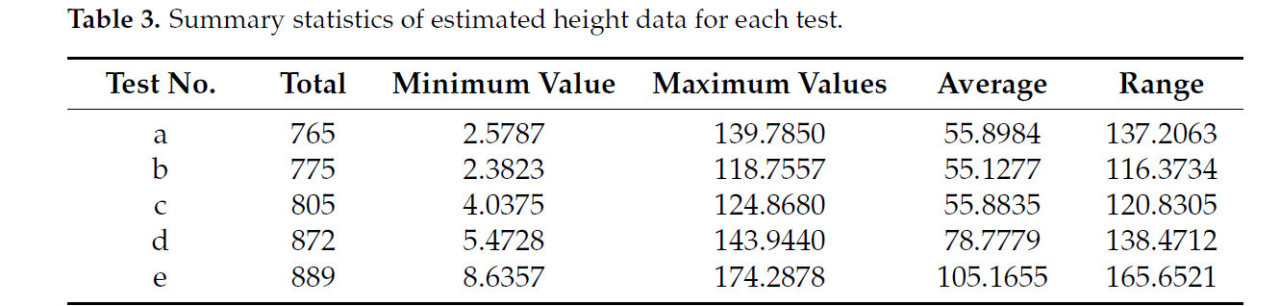
Таблица 3. Сводная статистика расчетных данных о высоте для каждого теста.
3.2. Сбор и анализ данных в реальном времени
Согласно Таблице 4 и Рисунку 14, измеренные вручную высоты растений кукурузы в пяти экспериментальных группах показали отчетливые паттерны распределения. Опыты a, b и c имели среднюю высоту растений кукурузы, сконцентрированную около 129–160 см (опыт b) и 120–160 см (опыт c) соответственно, что указывает на схожие стадии роста. Опыт d имел среднюю высоту растений около 167 см, с диапазоном распределения 140–200 см, что предполагает более длительный период вегетации по сравнению с опытами a, b и c. Опыт e имел среднюю высоту приблизительно 204 см, с диапазоном распределения 200–220 см, что указывает на значительно более длительный период вегетации, чем в других опытах.
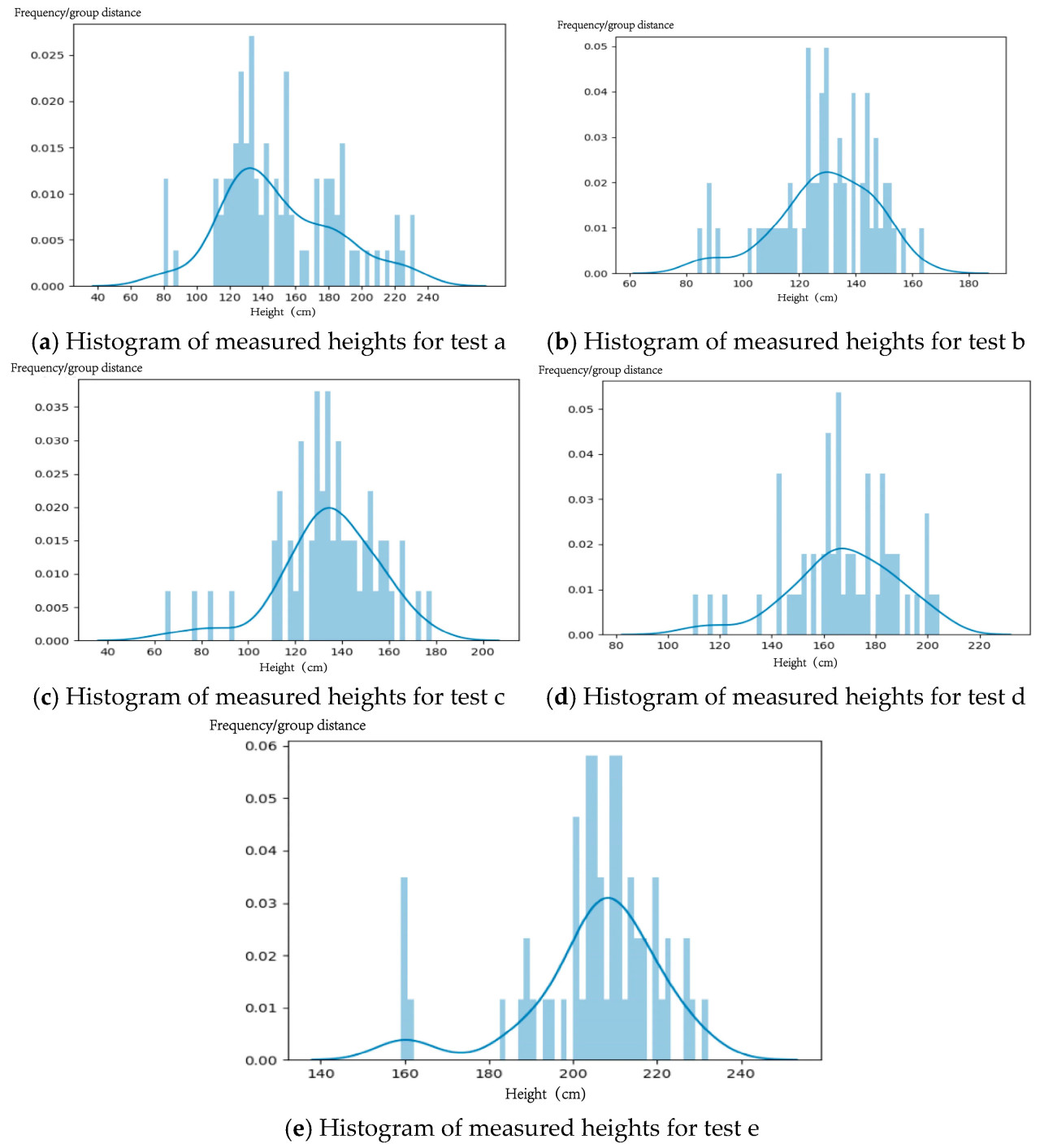
Рисунок 14. Гистограмма измеренных вручную данных о высоте растений кукурузы для пяти наборов тестов. Высоты для каждого теста (a–e) были получены путем ручного измерения, служа сравнением с наземной истиной для оценки облака точек.
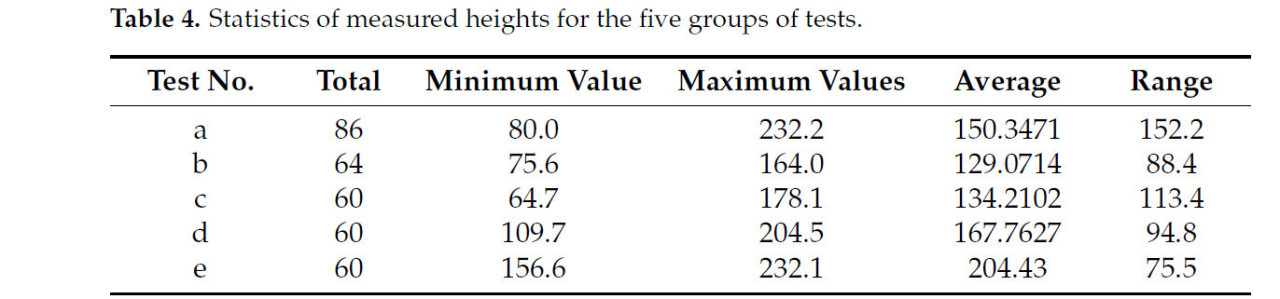
Таблица 4. Статистика измеренных высот для пяти групп тестов.
В сочетании с гистограммами данных о высоте, извлеченных из облака точек для каждого эксперимента, результаты показывают, что кривая распределения высот кукурузы, извлеченных из облака точек, близко соответствует измеренным вручную высотам. Это дополнительно подтверждает, что метод извлечения из облака точек, основанный на мультивидовой геометрической 3D-реконструкции, может точно отражать высоту растений кукурузы с высокой точностью измерения и полевой применимостью.
3.3. Анализ результатов
В этом исследовании осуществимость и точность извлечения высоты кукурузы в полевом масштабе из данных облака точек были проверены с помощью корреляционного анализа с данными ручных измерений высоты.
3.3.1. Анализ результатов отдельной пробной группы
Из анализа данных 215 корреляционных точек в пяти экспериментальных группах (a, b, c, d, e) результаты сравнения данных показаны на Рисунке 15. Линейный регрессионный анализ показал, что извлеченные данные о высоте из облака точек были высоко коррелированы с данными ручных измерений высоты, с R2 в диапазоне от 0,9880 до 0,9989, в среднем 0,9943. Среднеквадратичная ошибка (RMSE) находилась в диапазоне от 0,0148 м до 0,029 м, со средним значением 0,0222 м (как показано в Таблице 5). Линия подгонки была почти параллельна линии 1:1, что указывает на высокую степень совместимости и превосходную точность метода извлечения по сравнению с другими методами измерения высоты растений. Значение k параметров подобранной линии было близко к единице, что свидетельствует о стабильности модели. Однако расчетные высоты из облака точек были стабильно ниже измеренных вручную высот, что можно объяснить несколькими факторами. Ограничения метода извлечения из облака точек, включая затенение, неровные поверхности растений и проблемы с разрешением, могут препятствовать точному захвату истинной высоты растения. Кроме того, факторы окружающей среды, такие как освещение, положение растения, калибровка сенсора и изменчивость структуры поверхности растения (например, листья, ветви, изгиб стебля), могут дополнительно влиять на точность извлечения высоты. Ошибки ручного измерения, такие как трудности с определением верхушки растения, также способствуют этим расхождениям. Различия в значениях b отражают источники ошибок в различных пробных группах, включая среду измерения, изменчивость поверхности кукурузы и ошибки вычислений. Факторы окружающей среды, такие как условия освещения (например, переэкспонирование или затенение) и скорость ветра, могли внести изменчивость во время сбора данных с БПЛА, что привело к небольшим отклонениям в качестве реконструкции. Например, высокая скорость ветра могла вызвать нестабильность БПЛА, влияя на выравнивание мультиракурсных изображений и точность реконструкции облака точек. Чтобы минимизировать влияние этих факторов, в этом исследовании было реализовано несколько стратегий:
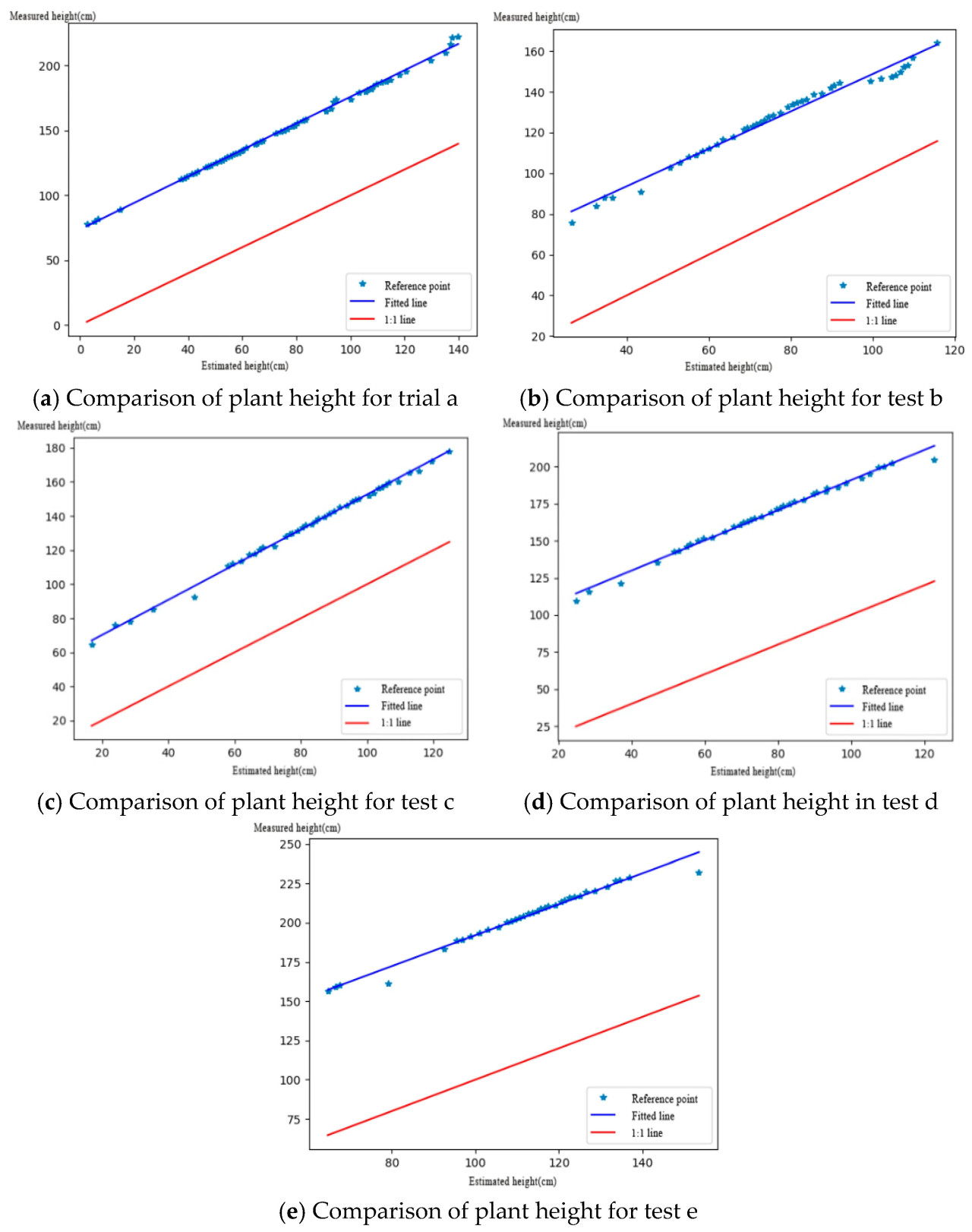
Рисунок 15. График сравнительной валидации высоты растений для пяти экспериментальных групп.
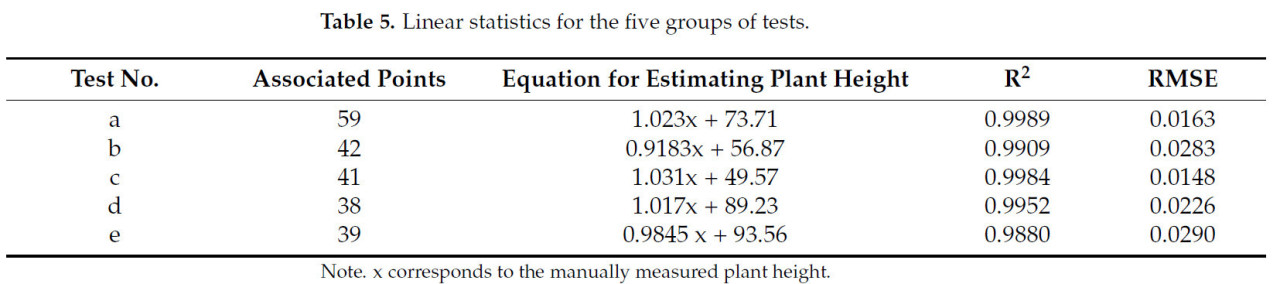
Таблица 5. Линейная статистика для пяти групп тестов.
(1) Контроль окружающей среды во время сбора данных: Полеты БПЛА проводились ранним утром или ближе к вечеру для обеспечения стабильных условий освещения и избежания переэкспонирования, вызванного полуденным солнечным светом. Полеты избегались в условиях сильного ветра для обеспечения стабильности БПЛА. Кроме того, время полетов было выбрано так, чтобы избежать периодов высокой влажности, таких как раннее утро с росой или послеобеденные часы с повышенным испарением почвы;
(2) Оптимизация траектории полета: Использовался крестообразный шаблон полета для обеспечения 70–80% перекрытия изображений. Это перекрытие минимизировало несоответствия, вызванные изменениями скорости ветра или условий солнечного освещения на разных изображениях;
(3) Постобработка и коррекция шума: Во время обработки облака точек были применены методы фильтрации шума, такие как удаление статистических выбросов и агрессивная фильтрация шума в Pix4Dmapper, для исправления нерегулярностей, вызванных движением растений или изменениями освещения;
(4) Валидация относительно наземных данных: Измерения высоты, полученные с БПЛА, были проверены относительно измеренных вручную наземных данных для количественной оценки и корректировки любых отклонений, внесенных факторами окружающей среды.
Хотя эти меры эффективно уменьшили влияние факторов окружающей среды, некоторые источники ошибок остались, такие как несовместимость изображений, вызванная высокой скоростью ветра, или снижение разрешения облака точек из-за неравномерных условий освещения. Эти проблемы могут приводить к незначительному снижению точности в определенных условиях. Тем не менее, общие результаты демонстрируют, что этот метод является высокоприменимым и надежным для оценки высоты в полевом масштабе в популяциях кукурузы.
В целом, результаты подтверждают осуществимость и точность извлечения высоты из облака точек для отдельных растений кукурузы в полевом масштабе. Однако определенные экологические проблемы, такие как меняющаяся интенсивность освещения или погодные условия, все еще могут требовать корректировки методов предварительной обработки или сбора данных.
3.3.2. Анализ результатов составной тестовой группы
Пять экспериментальных групп в этом исследовании были проведены на двух полях и в трех различных условиях произрастания растений кукурузы, обозначенных как поля 1 и 2 и растения кукурузы a, b и c. Составные тестовые группы указаны, как показано в Таблице 6.
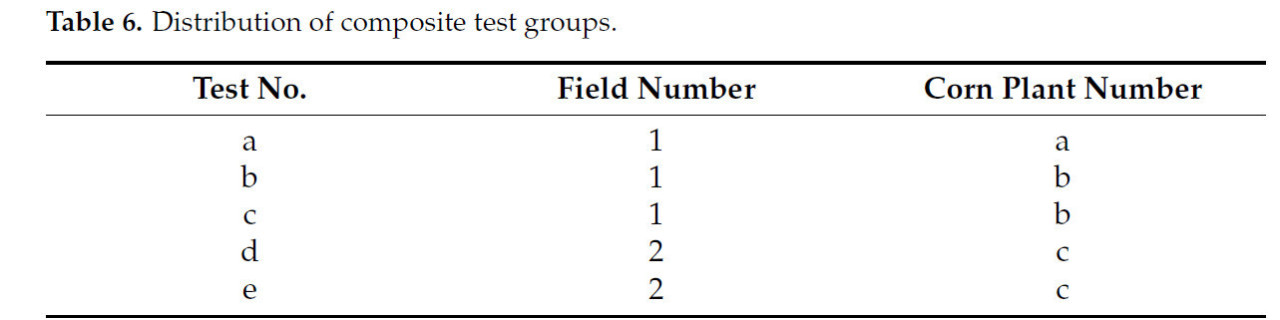
Таблица 6. Распределение составных тестовых групп.
Составная тестовая группа включала два поля и три различные среды произрастания растений кукурузы, состоящие из четырех серий опытов: опыты 1 и 2, проведенные с одними и теми же растениями кукурузы на одном и том же поле; опыт 3, проведенный с другим растением кукурузы на том же поле; и опыт 4, проведенный с другим растением на другом поле, как показано на Рисунке 16 и в Таблице 7.
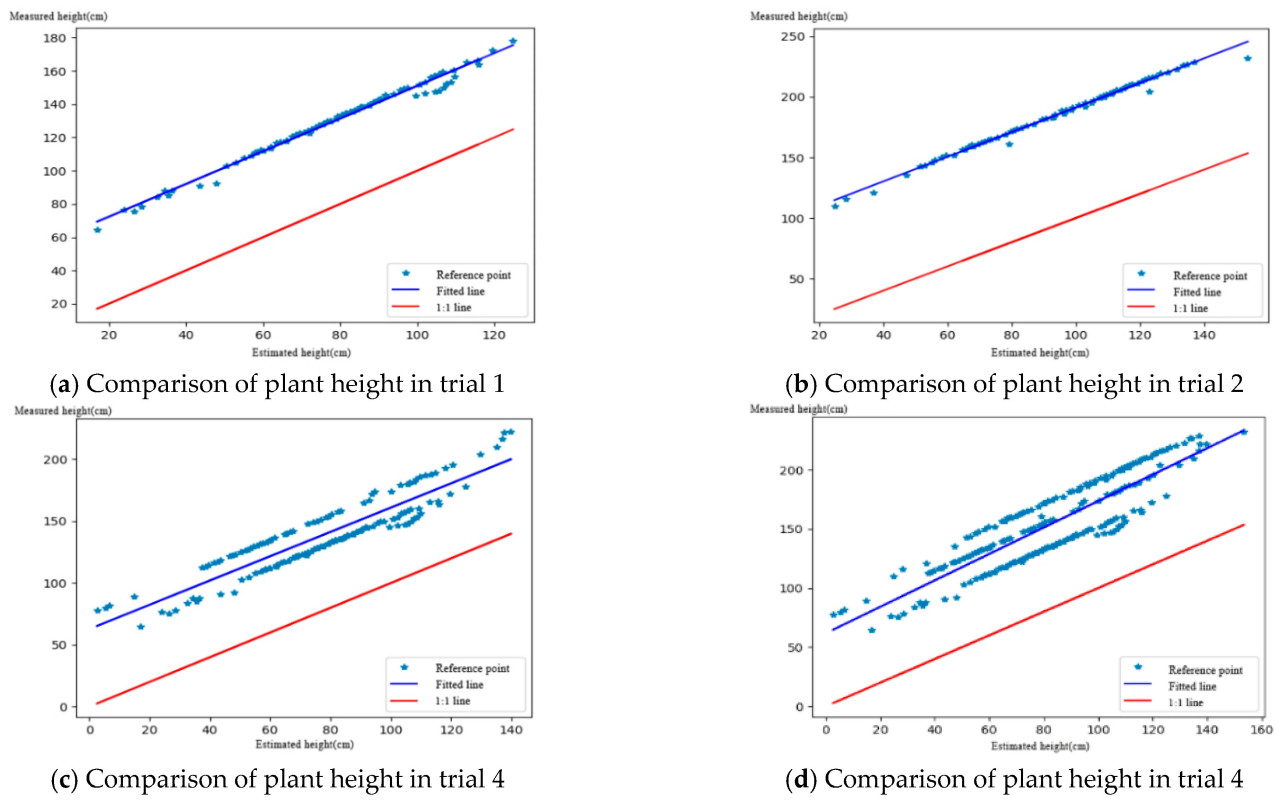
Рисунок 16. График валидации сравнения высоты растений для составных тестовых групп.
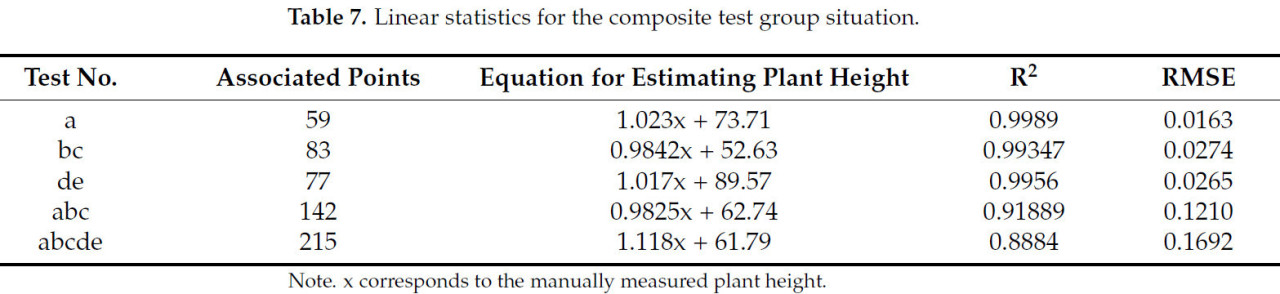
Таблица 7. Линейная статистика для ситуации составной тестовой группы.
Для опытов 1 и 2 R2 в условиях одинакового растения кукурузы на одном поле были выше 0,99, а RMSE — ниже 0,0274 м, что указывает на крайне высокую корреляцию данных и меньшую ошибку, чем в отдельной тестовой группе. Для опыта 3 R2 составил 0,91, RMSE — 0,121 при разных растениях кукурузы на одном поле, корреляция была слабее, чем в опытах 1 и 2, но все еще сохранялась высокая точность. Результаты показали, что модель имеет высокую осуществимость. Для эксперимента 4, при разных условиях растений на разных полях, R2 был самым низким — 0,8884, а RMSE — самым большим — 0,1692. Но корреляция все еще была сильной, а ошибка находилась на дециметровом уровне, что указывает на высокую осуществимость модели, но с большой погрешностью.
Основные причины различий в корреляции включают влияние экологических и временных различий (например, свет, скорость ветра и т.д.) на реконструкцию облака точек и эффект наложения ошибок в различных тестовых условиях. Хотя корреляция и точность составной тестовой группы были ниже, чем у отдельной тестовой группы, корреляция и точность в условиях одинакового растения кукурузы на одном поле были близки к показателям отдельной тестовой группы, что свидетельствует о высокой надежности метода данного исследования для полевого применения в определенных условиях. Например, во время полевых испытаний, проведенных при ярком солнечном свете, переэкспонирование могло вызвать потерю мелких деталей на изображениях, снижая разрешение облака точек. Аналогично, плотные структуры полога на более поздних стадиях роста кукурузы, например, в период созревания, могут создавать эффекты затенения, препятствующие точной сегментации отдельных растений. И наоборот, на ранних стадиях роста с более разреженными пологами шум, вносимый сорняками или почвой, может влиять на точность сегментации. Эти факторы демонстрируют, что точность метода может варьироваться в зависимости от условий окружающей среды и стадий роста кукурузы.
Хотя корреляция и точность составной тестовой группы были ниже, чем у отдельной тестовой группы, корреляция и точность в условиях одинакового растения кукурузы на одном поле были близки к показателям отдельной тестовой группы. Это свидетельствовало о высокой надежности метода данного исследования для полевого применения в определенных условиях. Будущие исследования могли бы изучить интеграцию мультиспектральных данных для улучшения точности сегментации растений в условиях плотного полога или включение данных LiDAR для уменьшения ошибок в оценке высоты, вызванных затенением и окклюзией. Дальнейшая оптимизация алгоритмов предварительной обработки, таких как передовые методы выравнивания изображений и фильтрации, также может улучшить качество облака точек в сложных условиях окружающей среды. Кроме того, мы сравнили предлагаемый алгоритм приближенной сегментации пространства столбцов с часто используемыми методами сегментации, такими как алгоритм наращивания областей и евклидова кластеризация, для дальнейшего подтверждения его эффективности.
Алгоритм наращивания областей, который сегментирует облака точек на основе согласованности кривизны и вектора нормали, хорошо работает для разреженных наборов данных, но имеет тенденцию объединять несколько растений в один кластер в густонасажденной или затененной среде. Аналогично, евклидова кластеризация эффективна в простых геометрических расположениях, но испытывает трудности с разделением перекрывающихся растений в полевых популяциях. Напротив, предлагаемый алгоритм аппроксимации пространства столбцов использует ориентацию вектора нормали и ограничения AABB ограничивающей рамки для достижения более точной сегментации, даже в сложных полевых условиях. Например, в затененных областях с перекрывающимися пологами алгоритм наращивания областей часто не может изолировать отдельные растения кукурузы, где он создает объединенные кластеры. Для сравнения, предлагаемый алгоритм успешно сегментировал отдельные облака точек для каждого растения. Количественно, предлагаемый метод достиг более высокой точности сегментации в условиях плотного полога: точность превысила 90%, по сравнению с приблизительно 80% для алгоритма наращивания областей и 75% для евклидовой кластеризации. Кроме того, вычислительная эффективность предлагаемого алгоритма была значительно выше, сокращая время обработки при сохранении точности сегментации.
Несмотря на эти преимущества, предлагаемый алгоритм может столкнуться с проблемами в случаях крайней нерегулярности морфологии растений или значительного экологического шума. Будущие исследования могли бы интегрировать мультиспектральные данные или данные LiDAR для повышения надежности сегментации, особенно в сложных средах. Более того, уточнение алгоритмов предварительной обработки, таких как передовые методы фильтрации, может дополнительно улучшить качество облака точек и уменьшить ошибки, вызванные затенением или окклюзией.
Таким образом, высота отдельного растения кукурузы, извлеченная на основе данных облака точек, имеет высокую осуществимость и точность в полевом масштабе. Однако исследование подчеркивает необходимость дальнейших улучшений для решения проблем, вызванных изменяющимися условиями окружающей среды (например, освещение и ветер) и стадиями роста кукурузы (например, плотные пологи и затенение). Включение дополнительных источников данных, таких как LiDAR или мультиспектральная съемка, и оптимизация процесса сегментации могли бы дополнительно повысить надежность и применимость метода в различных полевых сценариях.
4. Выводы
В этом исследовании мы провели систематическое исследование измерения высоты растений для популяций кукурузы в полевом масштабе с использованием технологии «структура из движения – мультистереозрение» на базе БПЛА и пришли к следующим основным выводам:
(1) Сбор данных и 3D-реконструкция: Мы разработали метод получения изображений, подходящий для популяций кукурузы в поле, использовали дрон для захвата мультиракурсных последовательностей изображений и успешно реконструировали плотное трехмерное облако точек с помощью метода SFM-MVS. Это создало прочную основу для сегментации облака точек и измерения высоты растений;
(2) Обработка и сегментация облака точек: Посредством процессов обрезки, фильтрации, удаления земли и понижающей дискретизации для предварительной обработки облака точек мы предлагаем приближенный алгоритм сегментации пространства столбцов. Это эффективно решает проблемы сегментации, вызванные затенением растений и сложностью ветвления популяций кукурузы в поле, обеспечивая высокоточную сегментацию отдельных растений;
(3) Измерение высоты растений и моделирование: Мы предложили метод извлечения высоты растений на основе ограничивающей рамки и подтвердили высокую степень согласованности между высотой растений, извлеченной из облака точек, и данными ручных измерений с помощью линейного регрессионного анализа. В многогрупповых тестах средний коэффициент аппроксимации (R2) для отдельных тестов достиг 0,9943, а среднеквадратичная ошибка (RMSE) составила менее 0,029 м. Для составных тестов средний R2 составил 0,9591, а средняя RMSE — 0,1014 м. Эти результаты указывают на то, что метод демонстрирует отличную точность измерений и применимость.
Таким образом, метод обработки и сегментации облака точек на основе технологии мультивидовой геометрической 3D-реконструкции предоставляет осуществимый подход для эффективного и точного измерения фенотипических параметров популяций сельскохозяйственных культур в полевом масштабе. Данное исследование предоставляет техническую поддержку для разработки моделей оценки высоты растений кукурузы и развития цифрового сельского хозяйства, а также способствует продвижению беспилотных систем мониторинга фенотипов сельскохозяйственных культур.
Более того, результаты этого исследования предоставляют важные идеи для проектирования будущих беспилотных систем мониторинга сельскохозяйственных культур. Что касается требований к аппаратному обеспечению, результаты подчеркивают важность использования БПЛА, оснащенных камерами высокого разрешения и стабильными полетными системами, для обеспечения точного сбора данных в различных условиях окружающей среды. Будущие системы также могут выиграть от включения передовых сенсоров, таких как LiDAR или мультиспектральные камеры, для улучшенного качества данных в условиях плотного полога или на сложных рельефах. Что касается операционных протоколов, полученные результаты подчеркивают необходимость оптимизированного планирования траектории полета (например, обеспечение адекватного перекрытия изображений и соответствующей высоты полета) и надежных алгоритмов обработки данных для работы с изменчивостью окружающей среды. Эти протоколы могут быть адаптированы для различных географических регионов с характерными экологическими проблемами.
Решая требования к аппаратному обеспечению и операционным протоколам, это исследование закладывает основу для проектирования более надежных и адаптируемых беспилотных систем мониторинга сельскохозяйственных культур, тем самым продвигая точное земледелие в глобальном масштабе.
Ссылки
1. Bendig, J.; Bolten, A.; Bennertz, S.; Broscheit, J.; Eichhorn, K.; Bareth, G. Estimating biomass of barley using crop surface models (CSMs) derived from UAV-based RGB imaging. Remote Sens. 2014, 6, 10395–10412. [Google Scholar] [CrossRef]
2. Araus, J.L.; Kefauver, S.C.; Vergara-Díaz, O.; Gracia-Romero, A.; Rezzouk, F.Z.; Segarra, J.; Buchaillot, M.L.; Chang-Espino, M.; Vatter, T.; Sanchez-Bragado, R.; et al. Crop phenotyping in a context of global change: What to measure and how to do it. J. Integr. Plant Biol. 2022, 64, 592–618. [Google Scholar] [CrossRef] [PubMed]
3. Ninomiya, S. High-throughput field crop phenotyping: Current status and challenges. Breed. Sci. 2022, 72, 3–18. [Google Scholar] [CrossRef] [PubMed]
4. Mulla, D.J. Twenty-five years of remote sensing in precision agriculture: Key advances and remaining knowledge gaps. Biosyst. Eng. 2013, 114, 358–371. [Google Scholar] [CrossRef]
5. Yang, G.; Liu, J.; Zhao, C.; Li, Z.; Huang, Y.; Yu, H.; Xu, B.; Yang, X.; Zhu, D.; Zhang, X.; et al. Unmanned Aerial Vehicle Remote Sensing for Field-Based Crop Phenotyping: Current Status and Perspectives. Front. Plant Sci. 2017, 8, 1111. [Google Scholar] [CrossRef]
6. Li, D.; Wang, Z.; Zhang, J. Estimation of crop height using UAV-based RGB and LiDAR data fusion. Remote Sens. 2020, 12, 865. [Google Scholar]
7. Pea, J.M.; Torres-Sánchez, J.; Castro, A.I.D.; Kelly, M.; López-Granados, F. Weed Mapping in Early-Season Maize Fields Using Object-Based Analysis of Unmanned Aerial Vehicle (UAV) Images. PLoS ONE 2013, 8, e77151. [Google Scholar] [CrossRef]
8. Bendig, J.; Yu, K.; Aasen, H.; Bennertz, S.; Broscheit, J.; Gnyp, M.L.; Bareth, G. Combining UAV-based plant height from crop surface models, visible, and near infrared vegetation indices for biomass monitoring in barley. Int. J. Appl. Earth Obs. Geoinf. 2015, 39, 79–87. [Google Scholar] [CrossRef]
9. Maes, W.H.; Steppe, K. The science of plant phenotyping: From roots to shoots. Front. Plant Sci. 2019, 10, 240. [Google Scholar]
10. Presti, D.L.; Di Tocco, J.; Massaroni, C.; Cimini, S.; De Gara, L.; Singh, S.; Raucci, A.; Manganiello, G.; Woo, S.L.; Cinti, S. Current understanding, challenges and perspective on portable systems applied to plant monitoring and precision agriculture. Biosens. Bioelectron. 2023, 222, 115005. [Google Scholar] [CrossRef]
11. Mishra, A.; Soni, M.; Gupta, R. A review of Structure from Motion (SFM) algorithms for 3D reconstruction. Int. J. Comput. Appl. 2013, 71, 13–18. [Google Scholar]
12. Holman, F.H.; Riche, A.B.; Michalski, A.; Castle, M.; Wooster, M.J.; Hawkesford, M.J. High Throughput Field Phenotyping of Wheat Plant Height and Growth Rate in Field Plot Trials Using UAV-Based Remote Sensing. Remote Sens. 2016, 8, 1031. [Google Scholar] [CrossRef]
13. Hassler, S.C.; Baysal-Gurel, F. Unmanned Aircraft System (UAS) technology and applications in agriculture. Agronomy 2021, 9, 618. [Google Scholar] [CrossRef]
14. Nielsen, K.M.; Duddu, H.S.; Bett, K.E.; Shirtliffe, S.J. UAV image-based crop growth analysis of 3D-reconstructed crop canopies. Plants 2022, 11, 2691. [Google Scholar] [CrossRef]
15. Tunca, E.; Kksal, E.S.; Taner, S.E.; Akay, H. Crop height estimation of sorghum from high resolution multispectral images using the structure from motion (SfM) algorithm. Int. J. Environ. Sci. Technol. (IJEST) 2024, 21, 1981–1992. [Google Scholar] [CrossRef]
16. Watanabe, K.; Guo, W.; Ninomiya, S. Modeling and estimation of plant height using photogrammetry and machine learning. Front. Plant Sci. 2017, 8, 2002. [Google Scholar]
17. Haug, S.; Michaels, A.; Schmitt, M. Crop height and density estimation using UAV-based RGB imagery. ISPRS J. Photogramm. 2014, 96, 149–162. [Google Scholar]
18. Chroni, A.; Vasilakos, C.; Christaki, M.; Soulakellis, N. Fusing Multispectral and LiDAR Data for CNN-Based Semantic Segmentation in Semi-Arid Mediterranean Environments: Land Cover Classification and Analysis. Remote Sens. 2024, 16, 2729. [Google Scholar] [CrossRef]
19. Xiao, K.; Qian, J.; Li, T.; Peng, Y. Multispectral LiDAR Point Cloud Segmentation for Land Cover Leveraging Semantic Fusion in Deep Learning Network. Remote Sens. 2023, 15, 243. [Google Scholar] [CrossRef]
20. Li, D.; Cao, Y.; Tang, X.S.; Yan, S.; Cai, X. Leaf Segmentation on Dense Plant Point Clouds with Facet Region Growing. Sensors 2018, 18, 3625. [Google Scholar] [CrossRef]
21. Huang, Y.; Lan, Y.; Wu, W.; Thomson, S.J. Spatial variability analysis of crop height based on LiDAR and multispectral UAV imagery. Precis. Agric. 2021, 22, 999–1015. [Google Scholar]
22. Zhou, Z.; Guo, X.; Wang, J. A review of LIDAR-based crop height measurement. Comput. Electron. Agric. 2021, 181, 105965. [Google Scholar]
23. Schirrmann, M.; Giebel, A.; Pflanz, M.; Löpmeier, F.J.; Dammer, K.H.; Bareth, G. Monitoring agronomic parameters of winter wheat crops with low-cost UAV imagery. Remote Sens. 2016, 8, 706. [Google Scholar] [CrossRef]
24. Roth, L.; Streit, U. Analysis of plant growth using segmentation algorithms for high-throughput phenotyping. Plant Methods 2019, 15, 5. [Google Scholar]
25. Sun, Q.; Wang, H.; Wang, S. UAV-based photogrammetric modeling of plant height and its potential for yield prediction. Agronomy 2021, 11, 758. [Google Scholar]
26. Zermas, D.; Morellas, V.; Mulla, D.; Papanikolopoulos, N. 3D model processing for high throughput phenotype extraction: The case of corn. Comput. Electron. Agric. 2020, 172, 105465. [Google Scholar] [CrossRef]
27. Singh, R.; Mosavi, A. A review on algorithms for segmentation of point clouds from 3D scans. Comput. Electron. Agric. 2020, 174, 105465. [Google Scholar]
28. Rusu, R.B.; Cousins, S. 3D is here: Point Cloud Library (PCL). In Proceedings of the IEEE International Conference on Robotics & Automation, Shanghai, China, 9–13 May 2011; pp. 1–4. [Google Scholar]
Zhang H, Liu N, Xia J, Chen L, Chen S. Plant Height Estimation in Corn Fields Based on Column Space Segmentation Algorithm. Agriculture. 2025; 15(3):236. https://doi.org/10.3390/agriculture15030236
Перевод статьи «Plant Height Estimation in Corn Fields Based on Column Space Segmentation Algorithm» авторов Zhang H, Liu N, Xia J, Chen L, Chen S., оригинал доступен по ссылке. Лицензия: CC BY. Изменения: переведено на русский язык
Фото: freepik

















































































































Комментарии (0)