Что лучше: дрон или наземный опрыскиватель? Сравнение распылителей и качества покрытия
Беспилотные авиационные системы опрыскивания (БАСО) стремительно набирают популярность в мире для применения пестицидов. Для оптимизации таких обработок необходима оценка покрытия, осаждения и размера капель при использовании различных параметров опрыскивания.
Аннотация
БАСО с нормой расхода рабочей жидкости 46,8 л/га обеспечила одинаковое или лучшее покрытие и осаждение по сравнению с наземным оборудованием при 93,5 л/га для всех типов распылителей, за исключением XR. При норме 18,7 л/га БАСО показала сниженное покрытие (<9% общего покрытия) и осаждение (<350 осаждений на см²) независимо от типа распылителя по сравнению с двумя другими режимами опрыскивания.
На верхних и задних водочувствительных бумажках (WSP) покрытие и осаждение были значительно выше, чем на передних, что, вероятно, связано с тем, что скорость и направление ветра играют более важную роль в динамике распыла, чем направление движения опрыскивателя. В целом, при норме 18,7 л/га выбор распылителя был менее критичен для покрытия и осаждения.
Распылители типов AITTJ60, AIXR и TADF могут считаться оптимальными для БАСО, особенно при 46,8 л/га, так как они улучшают покрытие, осаждение и расчетную степень восстановления препарата, обеспечивая при этом наибольший размер капель, что снижает потенциал сноса препарата.
Результаты исследования показали, что покрытие, осаждение и размер капель при использовании БАСО с нормой 46,8 л/га могут быть сопоставимы с наземным опрыскиванием при 93,5 л/га для широкого диапазона типов распылителей, и, следовательно, такая технология может быть эффективна для внесения пестицидов. Применение БАСО с нормой 18,7 л/га привело к значительно меньшему покрытию и осаждению независимо от типа распылителя, что создает риск снижения эффективности действия пестицидов.
1 Введение
Эффективное управление вредителями имеет жизненно важное значение для поддержания продуктивности сельского хозяйства, улучшения здоровья человека и минимизации экономических потерь. Серьезные негативные последствия для сельскохозяйственного производства и здоровья человека наблюдаются от насекомых (Belluco и др., 2023), растительных патогенов (например, грибов) (Kim и др., 2020; Ristaino и др., 2021) и сорняков (Pimentel и др., 2005; Научное общество по борьбе с сорняками Америки (WSSA), 2016). Кроме того, годовые потери экономики сельского хозяйства США из-за потерь урожая и затрат на гербициды от интродуцированных сорняков были оценены приблизительно в 26 миллиардов долларов США (Pimentel, 2009), при этом глобальные потери урожая оцениваются в 34%, а годовые затраты (потеря дохода плюс стоимость гербицидов) составляют более 125 миллиардов долларов США (Oerke, 2006; Gharde и др., 2018). Эта величина не учитывает оценочное 4,5%-ное увеличение стоимости продуктов питания на каждые 1% снижения урожайности, а также не учитывает приблизительно 11 миллиардов долларов США воздействия на окружающую среду и общественное здоровье. В результате потребность в пестицидах неудивительна: общемировое использование сельскохозяйственных пестицидов в 2021 году составило 1,70, 0,82 и 0,76 миллиона тонн для гербицидов, фунгицидов и инсектицидов соответственно (FAOSTAT, 2021). Необходимость вносить эти пестициды экономично и с учетом требований окружающей среды требует тщательного изучения и оптимизации каждой процедуры внесения.
Одной из основных философий оптимизации внесения пестицидов является более точное и прецизионное осаждение распыляемых жидкостей на целевой объект (Matthews и др., 2014). Методы достижения этой цели могут значительно варьироваться в зависимости от конкретного применения и многочисленных параметров, влияющих на покрытие и осаждение препарата. Предыдущие исследования показали, что размер капель распыла и покрытие зависели от типа распылителя и действующего вещества гербицида, что впоследствии приводило к неоднозначным последствиям для почвопокровных сорняков (Priess и др., 2021). Увеличение скорости опрыскивателя снижало покрытие при использовании опрыскивателя без контроля нормы расхода (Sapkota и др., 2023). Хотя опрыскиватель с контролем нормы расхода сглаживал колебания покрытия в диапазоне различных скоростей, это приводило к повышенной вариабельности размера капель распыла. Увеличение объема распыла впоследствии увеличивало покрытие целевого объекта, особенно когда требовалось проникновение в полог культуры (Legleiter and Johnson, 2016). Более того, повышенное давление внесения и асимметричные распылители с двумя вентиляторами и чередующимися расположениями увеличивали плотность капель на целевых объектах (Ferguson и др., 2016). Хотя покрытие и осаждение препарата не всегда были напрямую связаны с биологической эффективностью, предыдущие исследования, изучавшие влияние выбора распылителя на контроль ежовника куриного (Echinochloa crus-galli P. Beauv), выявили аналогичные численные тенденции: увеличение осаждения препарата приводило к снижению семенной продуктивности сорняков (Reed и др., 2024). В целом, существует множество сложностей в улучшении общего покрытия и осаждения распыла из-за трехмерной архитектуры растений, и возможным решением для улучшения осаждения является создание подходящего воздушного потока или увеличение турбулентности внутри полога культур (Matthews и др., 2014). Одним из таких методов внесения, который может способствовать этому свойству, является использование дистанционно пилотируемых авиационных систем опрыскивания (RPAAS).
Беспилотные авиационные системы (UAS), как для получения изображений, так и для опрыскивания, экспоненциально расширились за последние пять лет. Например, по оценкам, в 2016 году в Китае насчитывалось 4000 RPAAS для защиты растений; к 2021 году это число выросло до более чем 120 000 RPAAS, обрабатывающих более 71 миллиона гектаров пахотных земель (Ozkan, 2024). В настоящее время в Соединенных Штатах Федеральное авиационное управление (FAA) имеет более 375 000 коммерчески зарегистрированных UAS, причем почти 5 700 дополнительных воздушных судов зарегистрированы конкретно как RPAAS (FAA, 2024). Мировой рынок сельскохозяйственных UAS в 2021 году оценивался примерно в 1,4 миллиарда долларов США, при этом прогнозы предсказывают общий объем рынка в 11,9 миллиарда долларов США к 2028 году (Research and Markets, 2023). Кроме того, фермеры США, применяющие операции с UAS, указали на окупаемость инвестиций в размере 30 долларов США на гектар для кукурузы (Zea mays L.) и 5–7 долларов США на гектар для сои [Glycine max (L.) Merr.] и пшеницы (Triticum aestivum L.). Использование как UAS дистанционного зондирования, так и RPAAS расширилось и охватывает все аспекты защиты растений, включая болезни растений (Vitória и др., 2023), насекомых (Iost Filho и др., 2020) и сорняки (Hunter и др., 2020b). Однако динамика воздушного потока и переноса распыла RPAAS, особенно от роторных квадро-, гекса- и октокоптеров, уникальна по сравнению с наземными опрыскивателями, самолетами с фиксированным крылом и одномоторными вертолетами с несущим винтом.
Эту уникальную динамику внесения можно сравнить с опрыскивателем с вертикальной подачей воздуха сверху вниз. Опрыскиватели с воздушной поддержкой используют поле воздушного потока для содействия переносу и распределению пестицидов к пологу культур и внутри него, ранее было показано, что они увеличивают проникновение в полог и уменьшают снос по ветру (Matthews и др., 2014). Исследования с RPAAS показали, что нисходящий поток, создаваемый роторами, увеличивает скорость капель распыла, сужает распределение факела распыла, улучшает равномерность распределения капель и увеличивает осаждение и проникновение распыла, создавая тем самым более концентрированную область осаждения с меньшим риском сноса на нецелевые объекты по сравнению со стандартным внесением без нисходящего воздушного потока (Zhan и др., 2022; Feng и др., 2024; Fritz and Butts, 2024).
В нескольких исследованиях RPAAS была оценена оптимизация параметров внесения для осаждения распыла и борьбы с вредителями. Чтобы обобщить общие тенденции по результатам исследований, было установлено, что оптимизация распыла RPAAS происходит при высоте полета от 1,5 до 2 м и скорости полета от 3 до 5 м/с (Qin и др., 2016; Liao и др., 2019; Meng и др., 2019; Hunter и др., 2020a; Huang и др., 2023). Кроме того, RPAAS, оснащенные распылителями, дающими более крупные капли распыла, увеличивали осаждение распыла и снижали потенциал сноса по сравнению с оснащенными распылителями, дающими более мелкие распылы (Wang и др., 2019; Hunter и др., 2020a; Huang и др., 2023). Эти параметры внесения не только оптимизировали осаждение распыла, но и поддерживали или улучшали пестицидную активность (инсектициды, фунгициды, гербициды и дефолианты) по сравнению с более традиционными методами внесения (Qin и др., 2016; Liao и др., 2019; Meng и др., 2019; Wang и др., 2019; Huang и др., 2023). Объем распыла был наиболее вариабельным фактором для оптимизации осаждения распыла RPAAS: рекомендуемые объемы варьировались от 15 до 48 л/га (Liao и др., 2019; Meng и др., 2019; Wang и др., 2019; Delavarpour и др., 2023; Huang и др., 2023). В целом, RPAAS имеют потенциал стать альтернативным, эффективным инструментом для внесения пестицидов; однако они требуют специфической параметризации для достижения полной эффективности.
Поскольку популярность RPAAS продолжает расти, критически важна более тщательная оценка влияния настроек внесения и выбора распылителя на результирующую динамику распыла, особенно для оптимизации биологической эффективности вносимых пестицидов. Однако в настоящее время существует минимум исследований или они отсутствуют вовсе, которые предоставляли бы информацию о покрытии распылом, осаждении и размере капель в результате использования разнообразного набора распылителей на RPAAS для формирования более надежных рекомендаций по распылителям (Delavarpour и др., 2023). Следовательно, целью этого исследования была оценка целостного покрытия распылом, осаждения и размера капель от RPAAS по сравнению с наземным опрыскивателем в различных параметрах внесения, таких как выбор распылителя и объем распыла.
2 Материалы и методы
2.1 Лабораторный анализ размера капель
Лабораторный эксперимент был проведен осенью 2023 года для измерения распределения размера капель от типов распылителей, использованных в полевом эксперименте, описанном в следующем разделе. Шесть протестированных типов распылителей и соответствующая информация об их производителях приведены в Таблице 1. Обработки распылителями были выбраны на основе коммерческой популярности, способности предоставлять диапазон классификаций распыла и для оценки различных конструкций распылителей (т.е., однофакельные с прямым каналом потока, однофакельные с наклонным выпускным отверстием и двухфакельные). Для тестирования использовалась только вода в качестве раствора для распыления.
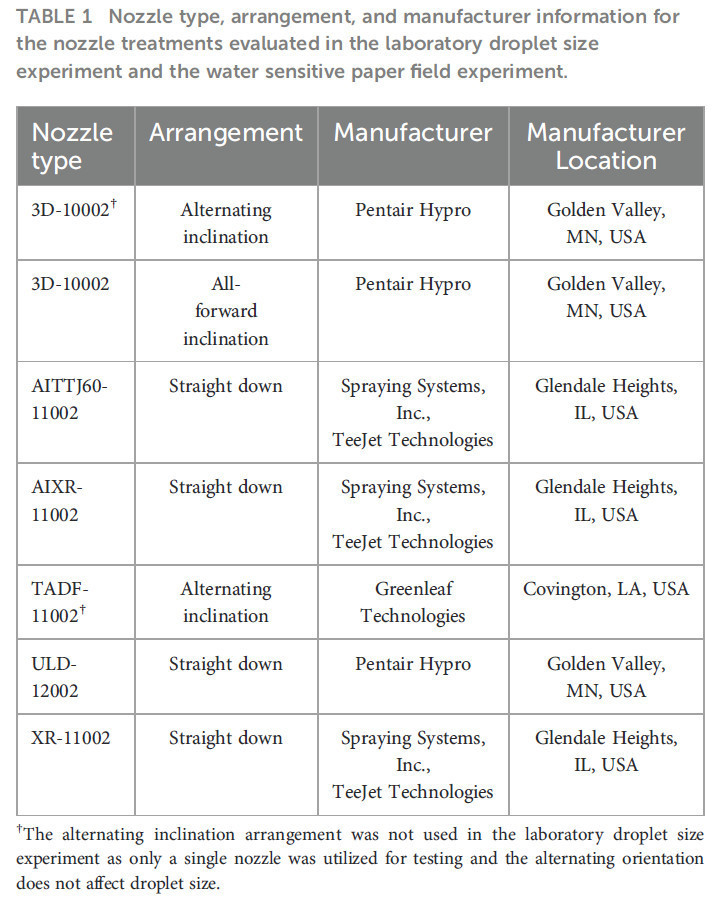
Таблица 1 – Тип распылителя, расположение и информация о производителе для обработок распылителями, оцененных в лабораторном эксперименте по размеру капель и полевом эксперименте с водочувствительной бумагой.
† Чередующееся расположение не использовалось в лабораторном эксперименте по размеру капель, так как для тестирования использовался только один распылитель, и чередующаяся ориентация не влияет на размер капель.
Процедуры лабораторного анализа размера капель и инфраструктура Лаборатории технологии авиационного опрыскивания Сельскохозяйственной исследовательской службы Министерства сельского хозяйства США были подробно описаны в предыдущем исследовании (Fritz и др., 2014b). Вкратце, аэродинамическая труба с низкой скоростью воздуха, расположенная в Колледж-Стейшн, Техас, США, имеет размеры 1,2 × 1,2 м и длину 9,8 м и работала при скорости воздуха 24 км/ч. Выходная секция трубы была направлена через систему форсированного импакционного скруббера, который использует вспомогательный вентилятор для поддержания скорости воздуха через фильтр. Распылитель был расположен так, чтобы распылять горизонтально, параллельно воздушному потоку, с факелом распыла, перпендикулярным лазерному лучу (Butts и др., 2019). Корпус распылителя перемещался вертикально, что позволяло производить выборку из всего факела распыла. Регулятор давления использовался для поддержания давления внесения на уровне 103 кПа для соответствия рабочим условиям в рамках полевого эксперимента, описанного позже. Давление измерялось с помощью электронного датчика давления (Модель PX409-100GUSB, Omega Engineering, Inc., Stamford, CT), расположенного в 20 см выше по потоку от выпускного отверстия распылителя.
Для анализа размера капель использовалась лазерная дифракционная система Sympatec HELOS. Была использована линза R7, которая имеет динамический диапазон измерения от 18 до 3500 мкм, разделенный на 32 интервала размера. Расстояние измерения между выпускным отверстием распылителя и лазерным лучом было установлено на 30,5 см. Каждая повторность измерения состояла из одного полного вертикального прохода через факел распыла. Было сделано достаточное количество повторностей, чтобы гарантировать, что стандартные отклонения Dv0,1, Dv0,5 и Dv0,9 (диаметры капель, в которых 10, 50 и 90% объема распыла содержится в каплях меньшего диаметра соответственно) находились в пределах ±5% от средних значений, при этом было сделано минимум три повторности. Собранные данные включали вышеупомянутые Dv0,1, Dv0,5 и Dv0,9, относительный размах (RS), который является безразмерным параметром, предоставляющим оценку дисперсии размеров капель в распыле, и процент объема распыла, содержащегося в каплях диаметром менее 200 мкм (%<200). Кроме того, классификации распыла были определены в соответствии со стандартом ASABE S572.3 (ANSI/ASABE, 2020). Данные о размере капель были статистически проанализированы с помощью дисперсионного анализа с использованием SAS v9.4 (SAS Institute, Cary, NC, USA) и процедуры GLIMMIX. Тип распылителя рассматривался как фиксированный эффект для Dv0,1, Dv0,5, Dv0,9, RS и %<200. Гамма-распределение было использовано для Dv0,1, Dv0,5, Dv0,9 и RS, так как данные были ограничены между 0 и положительной бесконечностью, а %<200 был проанализирован с использованием бета-распределения, так как данные были ограничены между 0 и 1 (Gbur и др., 2012; Stroup, 2012). Средние значения разделялись с использованием критерия Тьюки Honestly Significant Difference при α=0,05.
2.2 Покрытие, осаждение и Dv0,5 по водочувствительной бумаге
Полевой эксперимент был проведен недалеко от Ньюпорта, Арканзас, США (35.5756, -91.2521) весной 2023 года для измерения характеристик осаждения распыла при внесениях с использованием RPAAS (DJI AGRAS T30, SZ DJI Technology Co., Nanshan District, Shenzhen, China) и наземного опрыскивающего оборудования (Bowman MudMaster, Bowman Manufacturing Co., Inc., Newport, Arkansas, USA). Эксперимент представлял собой полностью рандомизированный дизайн с пятью повторностями. Обработки состояли из трех настроек внесения (RPAAS при 18,7 л/га, RPAAS при 46,8 л/га и наземное оборудование при 93,5 л/га), трех мест сбора водочувствительной бумаги (WSP) (верхнее, переднее и заднее) и семи типов/расположений распылителей. Типы распылителей, расположения и информация о производителе приведены в Таблице 1. Обработки были выбраны на основе распространенных текущих коммерческих внесений и для оценки целостного покрытия, как при моделировании всей структуры растения. Дополнительные распылители, включая Guardian Air Twin (GAT, Pentair Hypro, Golden Valley, MN, USA), Turbo TeeJet Induction (TTI, Spraying Systems, Inc., TeeJet Technologies, Glendale Heights, IL, USA) и Mid-Range Combo-Jet (MR, Wilger Inc., Lexington, TN, USA), были первоначально намечены для тестирования; однако из-за конструкций распылителей и уплотнительных колец эти распылители не могли быть правильно закреплены на RPAAS.
RPAAS управлялась с использованием режима Manual Plus, который фиксировал курс воздушного судна непосредственно над точками сбора, позволяя при этом ручное управление операцией опрыскивания. Скорость воздушного судна вводилась в контроллер перед внесением для поддержания постоянной скорости внесения. Для различных объемов распыла RPAAS управлялась на высоте полета 2,4 м с теоретической (введенной в контроллер) шириной захвата 5,5 м и включала 12 из 16 распылителей, работающих одновременно. Кроме того, расчетная общая скорость потока 4,81 л/мин использовалась для обоих вариантов объема распыла, что привело к теоретическому расчету давления приблизительно 103 кПа на распылителе. Это давление было ниже минимального рекомендованного производителем распылителей давления; однако эти размеры отверстий были коммерчески популярны в то время, когда проводилось исследование, и были предпочтением пилота-аппликатора RPAAS, помогавшего в исследовании. Поэтому было принято решение продолжить с низкими давлениями, чтобы предоставить оценку распространенных коммерческих настроек внесения RPAAS. Для создания вариантов объема распыла скорость полета RPAAS изменялась: 7,0 и 2,8 м/с для объемов распыла 18,7 и 46,8 л/га соответственно.
Наземное опрыскивающее оборудование управлялось с высотой штанги 0,7 м и двигалось со скоростью 5 км/ч. Оно имело переднюю штангу с шестью распылителями с расстоянием между распылителями 51 см, что соответствовало ширине прохода опрыскивания 3 м. Наземный опрыскиватель, работающий под давлением от сжатого воздуха, был откалиброван для подачи соответствующего объема распыла (94 л/га) с давлением 103 кПа на распылителе, чтобы соответствовать теоретическому расчетному давлению от RPAAS. В день испытаний погодные условия включали среднюю температуру воздуха 8,5°C, относительную влажность 57% и среднюю скорость ветра 6,9 км/ч (порывы до 14,5 км/ч) с направлением 77° (WatchDog 3550 Wireless ET Station, Spectrum Technologies, Aurora, IL USA). Как RPAAS, так и наземное опрыскивающее оборудование управлялись непосредственно по ветру для всех сборов данных.
Сбор данных состоял из покрытия распылом (%), осаждения (#/см²), Dv0,5 (мкм) и расчетного процента восстановления (осаждение в % от предполагаемой нормы внесения), измеренных с помощью водочувствительной бумаги (WSP), размещенной на стойках сбора, расположенных вдоль пути полета и движения, и находящихся в центре зоны опрыскивания оборудования (Рисунок 1). Следует отметить, что расчетный процент восстановления был определен только для верхней горизонтальной WSP, так как он является функцией предполагаемой нормы внесения и измеряется как количество материала, оседающего на горизонтальной плоскости и площади. Три листа WSP (Spraying Systems, Inc., TeeJet Technologies, Glendale Heights, IL, USA) были размещены на каждой стойке сбора, и было использовано пять отдельных стоек сбора. Три листа WSP включали горизонтальную бумагу, размещенную на высоте 15 см от уровня земли в верхней части стойки сбора (верхняя), вертикальную бумагу, размещенную непосредственно под верхней бумагой, обращенную к приближающемуся опрыскивателю (передняя), и вертикальную бумагу, размещенную непосредственно под верхней бумагой, обращенную от приближающегося опрыскивателя (задняя) (Рисунок 1). После каждого внесения WSP немедленно собирались, помещались в промаркированные пластиковые пакеты и хранились в климатически контролируемом помещении до анализа.
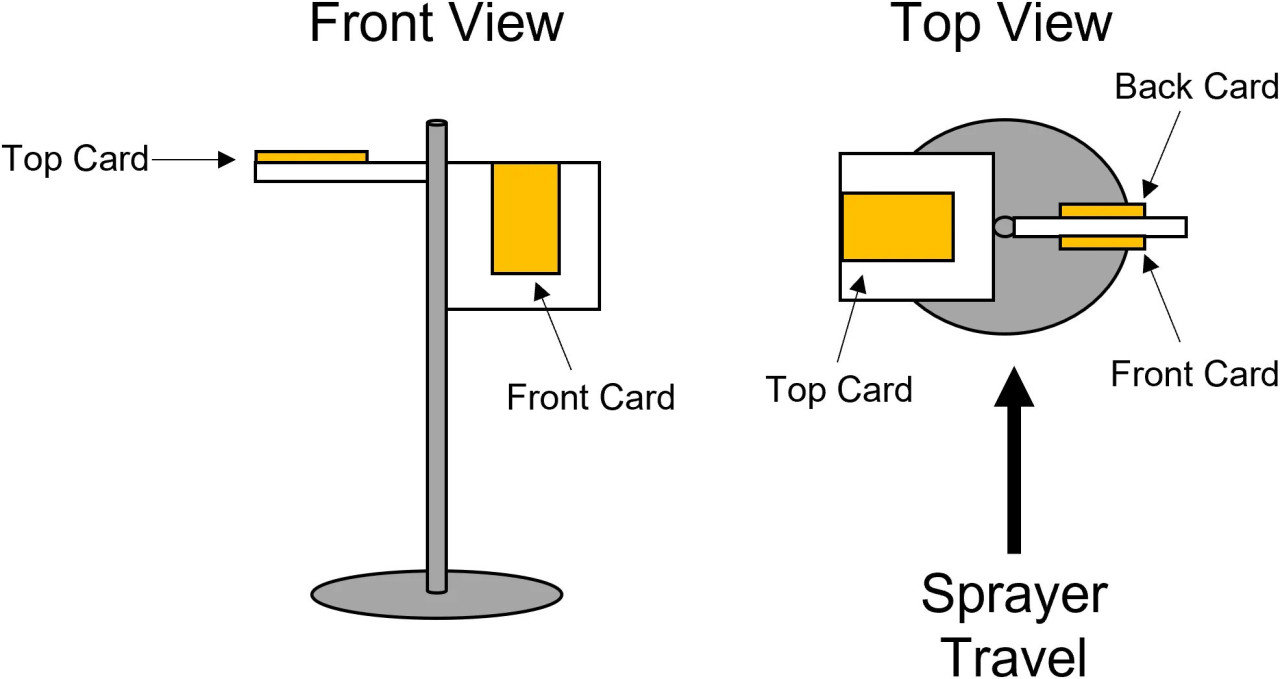
Рисунок 1 – Диаграмма, иллюстрирующая стойки сбора и ориентацию водочувствительной бумаги для сбора данных о покрытии распылом.
Затем WSP были проанализированы с использованием DepositScan (USDA-ARS, Прикладные исследования технологий, Вустер, Огайо, США) для вышеупомянутых переменных отклика (Zhu и др., 2011). DepositScan анализирует изображения отсканированных WSP и определяет количество отдельных пятен вместе с их площадями на выбранной области внутри изображения. Кумулятивное распределение капель, необходимое для определения Dv0,5 и количества осажденного распыла на единицу площади, рассчитывается из диаметров капель, связанных с каждым отдельным пятном, с использованием предварительно определенного коэффициента растекания, специфичного для воды и WSP. Хотя достоверность определения объемов осаждения распыла по WSP может ставиться под сомнение из-за надежности используемого метода коэффициента растекания, поскольку в качестве раствора для распыления использовалась только вода и все WSP во всех обработках обрабатывались с использованием одного и того же коэффициента растекания, сравнения относительных осаждений являются валидными (Hoffmann and Hewitt, 2005). В дополнение к оценке покрытия и осаждения индивидуально в каждом месте WSP, три бумаги с каждой стойки сбора суммировались для получения одного целостного трехмерного измерения с пятью повторностями. Эти переменные отклика были названы общим покрытием и общим осаждением.
После извлечения данных из DepositScan, данные были статистически проанализированы с помощью дисперсионного анализа с использованием SAS v9.4 (SAS Institute, Cary, NC, USA) и процедуры GLIMMIX. Настройка внесения, тип распылителя и расположение WSP рассматривались как фиксированные эффекты для покрытия распылом, осаждения и Dv0,5. Настройка внесения и тип распылителя рассматривались как фиксированные эффекты для общего покрытия, общего осаждения и расчетного процента восстановления. Покрытие распылом, общее покрытие и расчетный процент восстановления были проанализированы с использованием бета-распределения, так как данные были ограничены между 0 и 1 (до преобразования в процент для представления) (Gbur и др., 2012; Stroup, 2012). Осаждение, общее осаждение и Dv0,5 были проанализированы с использованием гамма-распределения, так как данные были ограничены между 0 и положительной бесконечностью. Средние значения разделялись с использованием критерия Тьюки Honestly Significant Difference при α=0,10.
Данные о размере капель как из лабораторного, так и из WSP-анализов были дополнительно сравнены с использованием линейных регрессий. Значение Dv0,5 с WSP было разделено на лабораторно измеренное Dv0,5 для каждого типа распылителя, чтобы предоставить процентный осажденный Dv0,5 на WSP. Затем это значение было регрессировано относительно Dv0,5 на WSP для выявления взаимосвязей между распределением распыляемых капель и распределением, которое осаждалось на WSP. Линейные модели были построены с использованием Microsoft Excel версии 2108 (Microsoft Office LTSC Professional Plus 2021, Microsoft Corporation, Redmond, WA, USA).
3 Результаты и обсуждение
3.1 Результаты лабораторного определения размера капель
Все переменные отклика распределения капель, Dv0,1, Dv0,5, Dv0,9, RS и %<200, зависели от типа распылителя (P<0.0001, Таблица 2). Переменная отклика Dv0,1 увеличивалась в зависимости от типа распылителя в порядке: XR < 3D < ULD < AIXR < TADF < AITTJ60. Кроме того, переменная %<200 дала точно обратную зависимость. Тип распылителя влиял на Dv0,5 аналогично Dv0,1, за исключением того, что TADF дал больший диаметр, чем AITTJ60. Dv0,9 следовало аналогичной тенденции, что и Dv0,5, за исключением того, что ULD и AIXR поменялись местами, а XR и 3D дали сходные Dv0,9. Переменная RS увеличивалась в порядке: AITTJ60 ≤ AIXR ≤ TADF = 3D < XR < ULD. Это указывает на то, что AITTJ60 дал наиболее гомогенное распределение капель среди оцененных распылителей, в то время как ULD дал наиболее гетерогенное распределение капель. В целом, измеренные распределения размера капель привели к классификациям распыла в диапазоне от Мелкого (XR) до Чрезвычайно Крупного (AITTJ60 и TADF).
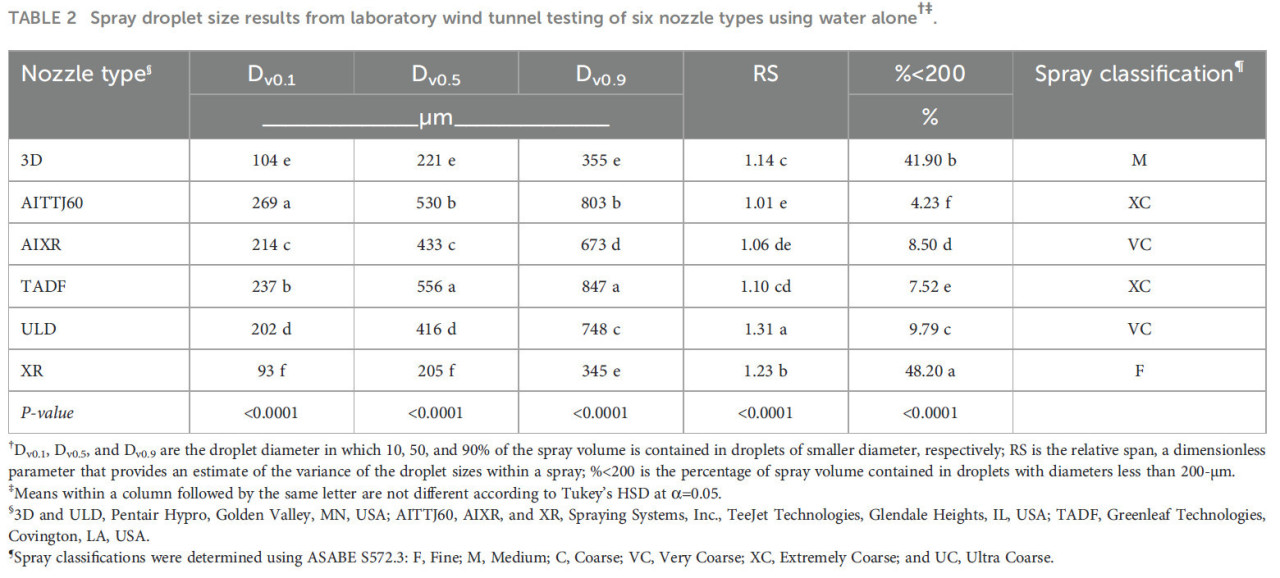
Таблица 2 – Результаты размера капель распыла из лабораторных испытаний в аэродинамической трубе шести типов распылителей с использованием только воды†‡.
Эти результаты демонстрируют, что диапазон типов распылителей, оцененных в этом исследовании, предоставил широкий спектр размеров капель, классификаций распыла, динамики распыла и потенциала сноса. Как обсуждалось в предыдущей литературе о влиянии размера капель на покрытие пестицидами (Knoche, 1994; Matthews и др., 2014), широкий диапазон характеристик капель, испускаемых протестированными типами распылителей, обеспечил эффективную, разнообразную оценку характеристик распыла на покрытие распылом RPAAS. Кроме того, предыдущие исследования определили, что состав распыляемой жидкости влияет на распыление (Miller and Butler Ellis, 2000); однако было выявлено, что действующее вещество гербицида оказывает меньшее влияние на общий размер капель распыла, чем тип распылителя и рабочее давление (Creech и др., 2015). Хотя добавление гербицида в распыляемый раствор здесь, вероятно, изменило бы точные результаты размера капель, относительные сравнения между обработками, выраженные в этом исследовании, все равно были бы валидными.
Следует отметить, однако, что представленные лабораторные данные о размере капель могут не полностью отражать истинные размеры капель, испускаемых системой RPAAS, которая включает эффекты ротора и воздушной струи (Fritz and Butts, 2024), и поэтому их следует рассматривать только как оценку общего влияния каждого типа распылителя на распределение размера капель от RPAAS. Дополнительные исследования необходимы для детальной характеристики динамики RPAAS и влияния воздушной струи ротора на результирующие распределения размера капель.
3.2 Покрытие, осаждение и Dv0,5 по водочувствительной бумаге
Существенное трехстороннее взаимодействие между настройкой внесения, типом распылителя и расположением WSP имело место для покрытия распылом (P=0,0009), осаждения (P<0,0001) и Dv0,5 (P=0,0002). Однако из-за сложности представления и обсуждения этого трехстороннего взаимодействия для получения значимых выводов данные были повторно проанализированы в разрезе мест расположения WSP. Этот анализ привел к существенному (α=0,1) двухстороннему взаимодействию между настройкой внесения и типом распылителя для покрытия распылом, осаждения, Dv0,5 и расчетного процента восстановления (только верхняя WSP) во всех местах расположения WSP, за исключением Dv0,5, измеренного на передней WSP (Таблица 3).
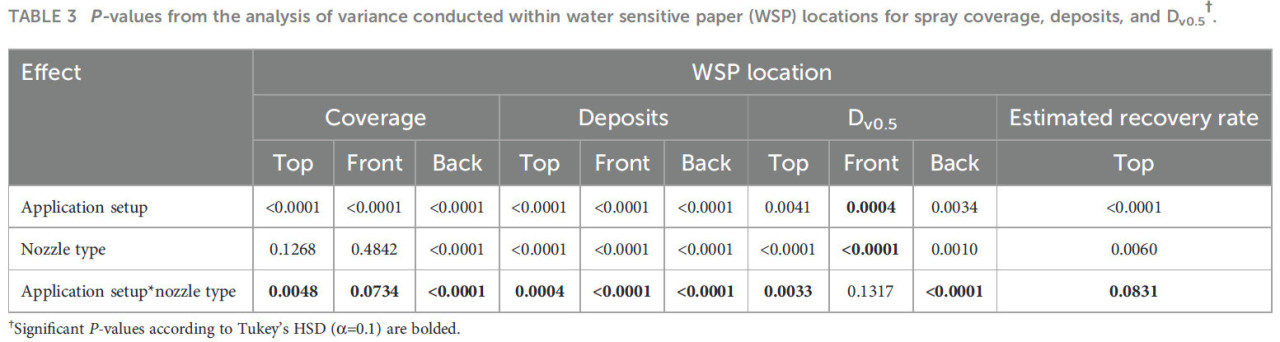
Таблица 3 – P-значения из дисперсионного анализа, проведенного в разрезе мест расположения водочувствительной бумаги (WSP) для покрытия распылом, осаждения и Dv0,5†.
На верхней горизонтально ориентированной WSP наибольшее покрытие (20,5%) было получено при внесении наземным оборудованием при 93,5 л/га с использованием распылителя XR (Таблица 4). Это, вероятно, связано с комбинацией наименьшего размера капель среди протестированных распылителей (Таблицы 2, 4), наибольшего объема распыла и близости к целевому объекту при распылении с наземного опрыскивателя. Однако несколько обработок были статистически эквивалентны, включая три из семи обработок RPAAS при 46,8 л/га (распылители 3D-Forward, AITTJ60 и AIXR) (Таблица 4). Кроме того, по всем протестированным распылителям, за исключением XR, покрытие от RPAAS при 46,8 л/га было сходным с покрытием от наземного оборудования, вносимого с 93,5 л/га. Несмотря на несколько случаев сходного покрытия, полученного от RPAAS при 18,7 л/га с наземным опрыскивающим оборудованием, покрытие никогда не превышало 4,5% независимо от используемого распылителя. В целом, для наземного опрыскивающего оборудования покрытие было наибольшим численно по типам распылителей в порядке: XR > 3D-чередующийся > 3D-прямой > AITTJ60 > TADF > ULD > AIXR, в то время как покрытие от распылителей, установленных на оборудовании RPAAS, в целом было наибольшим численно в порядке: AIXR > AITTJ60 > 3D-прямой > 3D-чередующийся > TADF > XR > ULD. Этот результат иллюстрирует, что динамика распыла значительно различается между системами RPAAS и наземными опрыскивателями, и последующие решения о выборе распылителя потребуют специфического тестирования с RPAAS, поскольку рекомендации от наземного оборудования могут быть неприменимы.
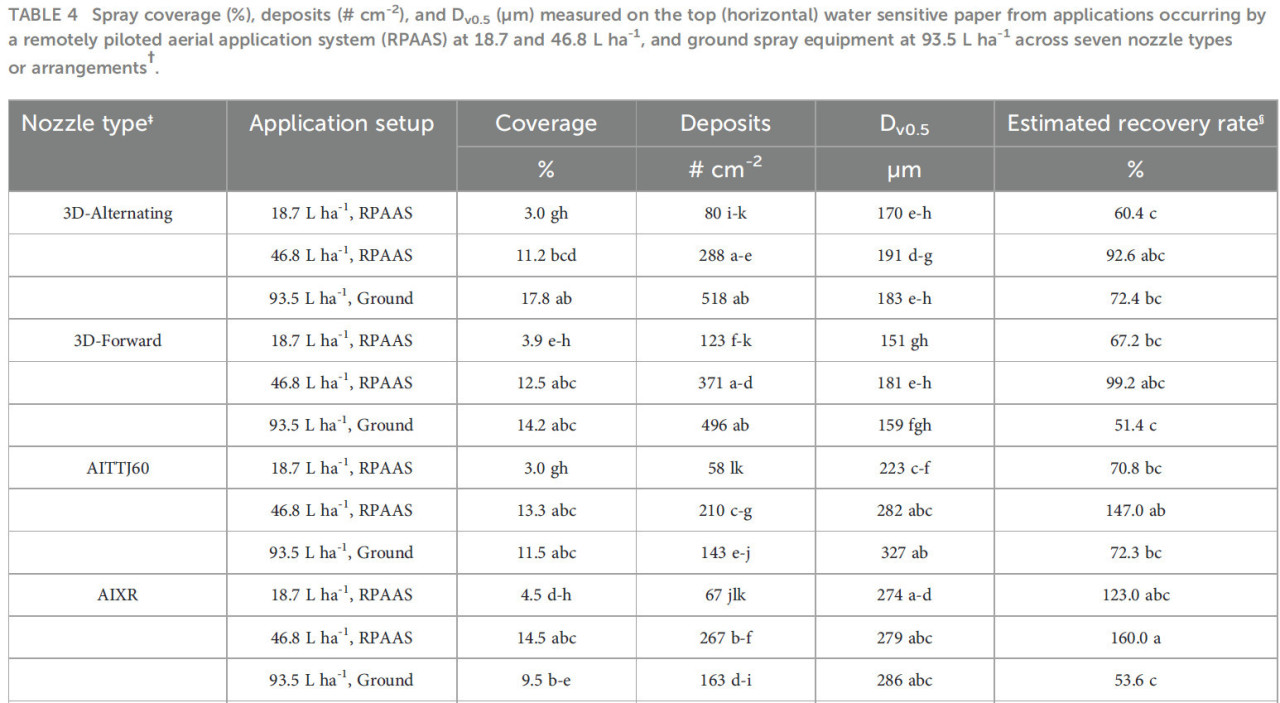
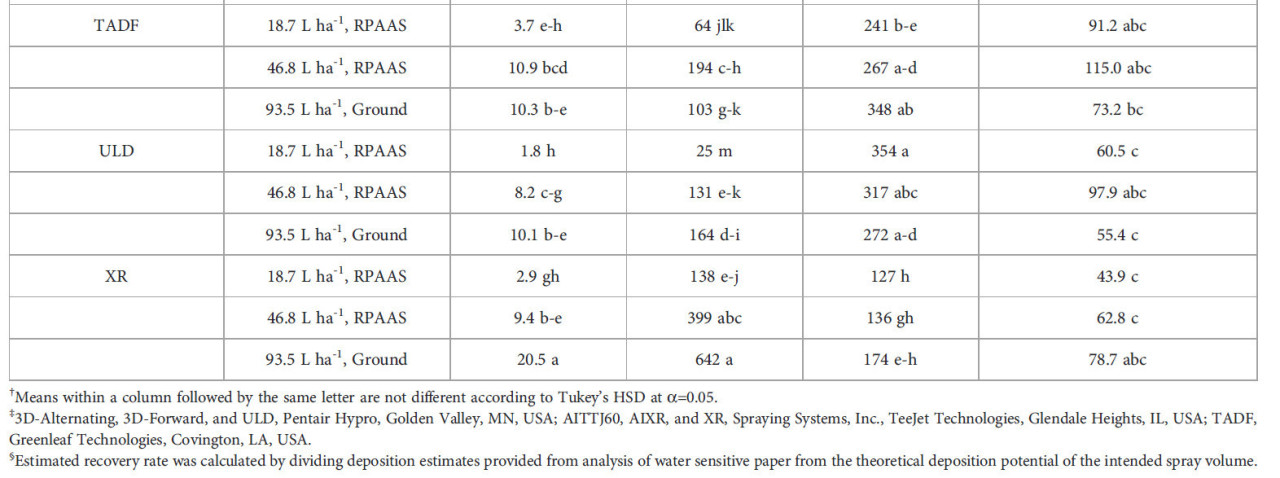
Таблица 4 – Покрытие распылом (%), осаждение (#/см²) и Dv0,5 (мкм), измеренные на верхней (горизонтальной) водочувствительной бумаге при внесениях, выполняемых дистанционно пилотируемой авиационной системой опрыскивания (RPAAS) при 18,7 и 46,8 л/га, и наземным опрыскивающим оборудованием при 93,5 л/га, с использованием семи типов или расположений распылителей†.
Осаждение, измеренное на верхней WSP, следовало аналогичной тенденции по обработкам, что и измеренное покрытие, при этом наибольшее количество осаждений на см² (642) наблюдалось на WSP от наземного оборудования при 93,5 л/га с использованием распылителя XR (Таблица 4). Однако RPAAS при 46,8 л/га привела к эквивалентному осаждению на верхней WSP, что и наземное оборудование при 93,5 л/га, по всем протестированным распылителям. RPAAS при 18,7 л/га снова отставала от других настроек внесения: пять из семи протестированных типов распылителей дали 80 или менее осаждений на см². Несмотря на появление аналогичной тенденции для осаждения и покрытия в результате настроек внесения, не проявилось четкой тенденции для выбора распылителя между покрытием и осаждением. Для наземного опрыскивающего оборудования тип распылителя в целом давал наибольшее осаждение численно на WSP в порядке: XR > 3D-чередующийся > 3D-прямой > ULD > AIXR > AITTJ60 > TADF. Три лучших распылителя (XR, 3D-чередующийся и 3D-прямой) оставались стабильными между переменными отклика покрытия и осаждения; однако другие распылители не оставались в том же порядке. В результате, покрытие и осаждение от наземного оборудования, вероятно, были в большей степени результатом размера капель (Таблицы 2, 4), чем других критериев выбора распылителя, таких как двухфакельный против однофакельного. В отличие от этого, типы распылителей, установленные на RPAAS, в целом давали наибольшее осаждение численно в порядке: XR > 3D-прямой > 3D-чередующийся > AIXR > AITTJ60 > TADF > ULD. Наблюдалось минимальное совпадение между покрытием и осаждением в отношении порядка типов распылителей, что указывает на то, что динамика покрытия распылом и осаждения капель от RPAAS гораздо сложнее, чем при стандартных наземных внесениях (что снова подчеркивает сложность выбора распылителя для операторов RPAAS).
В дополнение к покрытию и осаждению на верхней карточке, был рассчитан расчетный процент восстановления (% осаждения, определенного по WSP, деленный на теоретическую предполагаемую норму внесения), чтобы предоставить меру эффективности осаждения распыла (Таблица 4). В целом, самый низкий расчетный процент восстановления (43,9%) был получен от распылителя XR, установленного на RPAAS, работающей при 18,7 л/га. Однако три наибольших значения расчетного процента восстановления были получены от RPAAS, работающей при 46,8 л/га, с типами распылителей AIXR (160%), AITTJ60 (147%) и TADF (115%). За исключением распылителя XR, RPAAS при 46,8 л/га привела к более высокому расчетному проценту восстановления, чем наземное опрыскивающее оборудование, для каждого оцененного типа распылителя, что указывает на то, что эта настройка внесения была высокоэффективной при осаждении распыла на целевой объект непосредственно под линией полета RPAAS. Кроме того, для распылителей 3D-прямой, AIXR и TADF RPAAS при 18,7 л/га обеспечила по крайней мере на 15 процентных пункта более высокие значения расчетного процента восстановления численно, чем наземное опрыскивающее оборудование. Эта повышенная эффективность осаждения может помочь объяснить, почему предыдущие исследования наблюдали положительную эффективность пестицидов при низких объемах распыла с системами RPAAS (Qin и др., 2016; Meng и др., 2019; Delavarpour и др., 2023; Huang и др., 2023). Однако следует отметить, что это может быть связано с эффектом "воронки" в модели полосы распыла, наблюдаемым у RPAAS, откладывающим больше распыла непосредственно под линией полета на траектории полета по ветру (Yallapa и др., 2023). Дополнительные исследования необходимы для оценки результирующей ширины полосы распыла в зависимости от типа распылителя, а также влияния скорости и направления окружающего ветра на эту эффективность осаждения по всей полосе распыла (Bonds и др., 2023).
Аналогичные тенденции проявились для покрытия и осаждения на задней (Таблица 5) и передней (Таблица 6) WSP, как и на ранее обсуждавшейся верхней WSP. RPAAS при 18,7 л/га снова привела к сниженному покрытию и осаждению по оцененным типам распылителей по сравнению с другими настройками внесения. Покрытие от обработки RPAAS при 18,7 л/га никогда не превышало 4,4 и 1,1% на задней и передней WSP соответственно, а осаждение никогда не превышало 198 и 22 на см² соответственно (Таблицы 5, 6). RPAAS при 46,8 л/га обеспечила сходное или большее покрытие, чем наземное оборудование при 93,5 л/га, на задней WSP для шести из семи оцененных типов распылителей (Таблица 5), но только для двух из семи типов распылителей, оцененных на передней WSP (Таблица 6). Для осаждения RPAAS при 46,8 л/га сохранила или увеличила количество осажденных капель по сравнению с наземным оборудованием при 93,5 л/га на задней WSP для всех семи оцененных типов распылителей (Таблица 5) и для шести из семи оцененных типов распылителей на передней WSP (Таблица 6). Кроме того, минимальные связи снова проявились в отношении оптимального выбора распылителя для RPAAS, который максимизировал бы как покрытие, так и осаждение для используемых объемов распыла, в то время как выбор распылителей XR и 3D-чередующийся были безоговорочными лидерами по оптимизации покрытия и осаждения для наземного опрыскивающего оборудования. Будущие исследования должны оценить пестицидную эффективность этих различных типов распылителей, установленных на RPAAS, чтобы лучше определить рекомендации по оптимальному выбору распылителя. Кроме того, дальнейшие исследования должны изучить любые связи между покрытием распылом и осаждением на дополнительных местах расположения WSP (передняя и задняя) с результирующей пестицидной эффективностью, чтобы определить, существует ли дополнительное преимущество в понимании целостной динамики осаждения распыла.
Таблица 5 – Покрытие распылом (%), осаждение (#/см²) и Dv0,5 (мкм), измеренные на задней (вертикальной) водочувствительной бумаге при внесениях, выполняемых дистанционно пилотируемой авиационной системой опрыскивания (RPAAS) при 18,7 и 46,8 л/га, и наземным опрыскивающим оборудованием при 93,5 л/га, с использованием семи типов или расположений распылителей†.
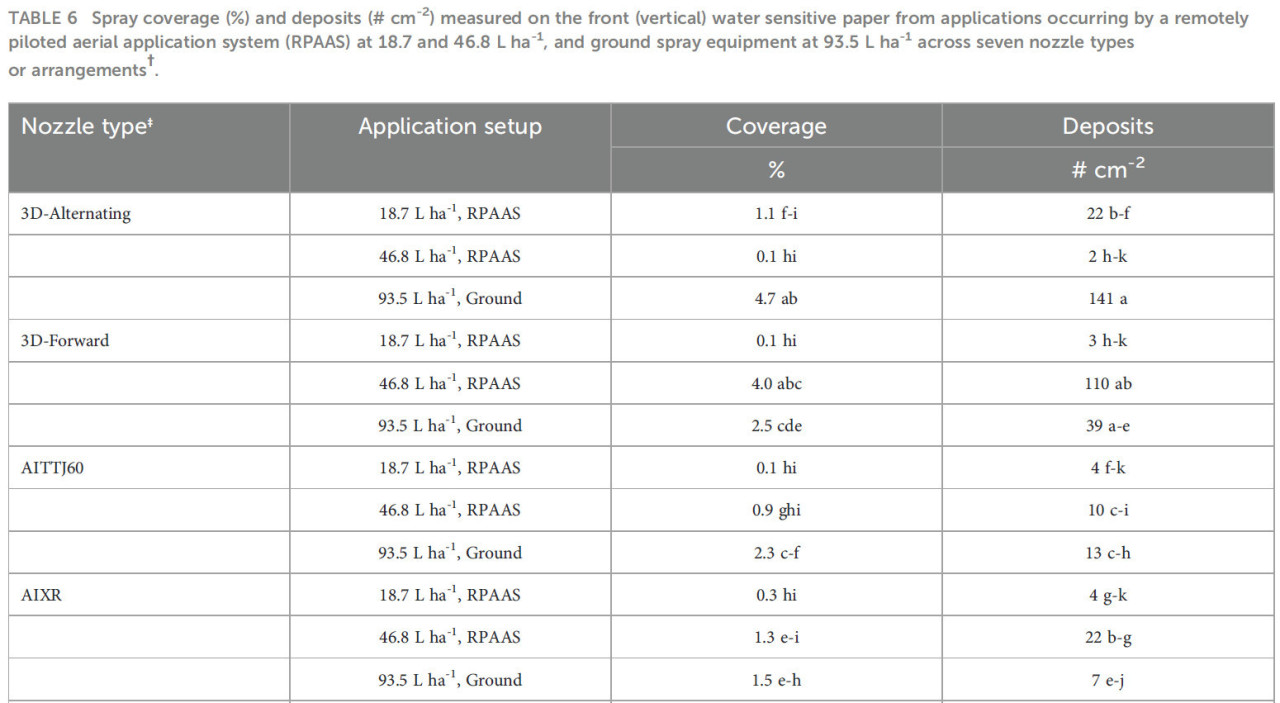
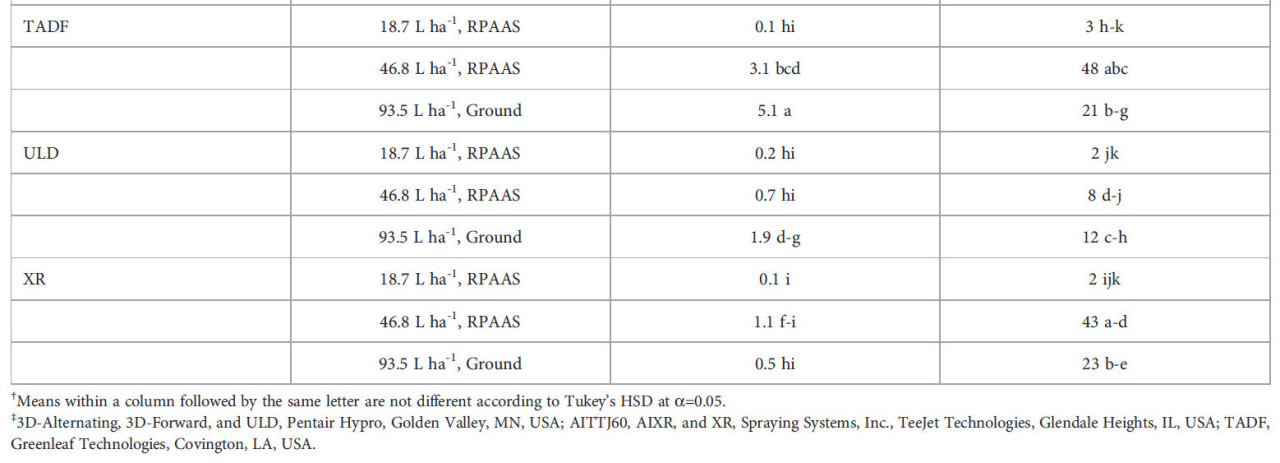
Таблица 6 – Покрытие распылом (%) и осаждение (#/см²), измеренные на передней (вертикальной) водочувствительной бумаге при внесениях, выполняемых дистанционно пилотируемой авиационной системой опрыскивания (RPAAS) при 18,7 и 46,8 л/га, и наземным опрыскивающим оборудованием при 93,5 л/га, с использованием семи типов или расположений распылителей†.
Хотя места расположения WSP не сравнивались статистически, следует кратко обсудить покрытие и осаждение в соответствующих местах сбора. В целом, покрытие было наибольшим по факторам обработки в порядке: верхняя, задняя и передняя WSP соответственно, в то время как осаждение было наибольшим в порядке: задняя, верхняя и передняя WSP соответственно (Таблицы 4–6). Предыдущие исследования показали, что большее удержание капель может происходить, особенно с более мелкими каплями, на вертикальных поверхностях по сравнению с горизонтальными, что помогает объяснить большее осаждение на задней WSP по сравнению с верхней WSP (Lake, 1977). Однако более крупные капли с повышенным потенциалом растекания и, следовательно, способностью увеличивать измерения покрытия, более склонны оседать на горизонтальных поверхностях (Lake, 1977; Thacker and Hall, 1991). Особенно интересная заметка для обеих переменных отклика заключается в том, что на задней WSP (обращенной от направления движения опрыскивателя) покрытие и осаждение были увеличены по сравнению с передней WSP (обращенной к направлению движения опрыскивателя). Только 1 из 21 комбинации типа распылителя и настройки внесения имел увеличенное покрытие на передней WSP по сравнению с задней WSP, в то время как 0 из 21 комбинаций привели к увеличенному осаждению. Хотя нисходящий поток от роторов RPAAS может частично помочь объяснить этот результат (Zhan и др., 2022; Delavarpour и др., 2023), поскольку результат также наблюдался почти для всех обработок наземным оборудованием, это может быть скорее указанием на влияние факторов окружающей среды, например, скорости и направления ветра, на результирующую динамику распыла. Все внесения для этого исследования производились в одном направлении, прямо при средней скорости ветра 12 км/ч. Выдвигается предположение, что сила ветра была более значимым фактором для испускаемых капель, чем эффект поступательного движения опрыскивателей, что привело к большему накоплению на задней WSP.
Dv0,5, измеренный с помощью WSP, предоставляет оценку среднего размера капель, осаждающихся на целевом объекте, в отличие от измеренного полного распределения размера капель, которое было охарактеризовано с использованием лабораторных методов лазерной дифракции. В целом, Dv0,5 на WSP был меньше для каждой комбинации типа распылителя и настройки внесения по сравнению с измеренным лазерной дифракцией Dv0,5, за исключением двух обработок TADF на верхней WSP и одной обработки XR на задней WSP (Таблицы 2, 4, 5). Однако Dv0,5 XR на задней WSP, вероятно, был ложным результатом из-за чрезмерного растекания и перекрытия капель, поскольку покрытие превышало 30%. Предыдущие исследования показали, что достоверность и точность WSP снижается при покрытии более 17% (Cunha и др., 2012).
На верхней WSP на Dv0,5 относительно не повлияла настройка внесения, причем единственное различие возникло при использовании распылителя AITTJ60 на RPAAS при 18,7 л/га (223 мкм) по сравнению с наземным оборудованием при 93,5 л/га (327 мкм) (Таблица 4). В целом, осажденный Dv0,5 увеличивался по типам распылителей в порядке: XR < 3D-прямой < 3D-чередующийся < AITTJ60 < AIXR < TADF < ULD. На осажденный Dv0,5 на задней WSP совершенно не повлияли комбинации типа распылителя и настройки внесения, за исключением вышеупомянутой разницы с распылителем XR, которая, вероятно, была результатом ограничений программного измерения WSP. Этот результат также поддерживает вышеупомянутую гипотезу о том, что скорость и направление ветра влияли на осаждение капель в большей степени, чем направление движения опрыскивателя. Поскольку постоянная скорость ветра 12 км/ч и направление перемещали бы капли аналогичного размера независимо от комбинации настроек внесения и типа распылителя, логично, что аналогичные размеры капель оседали и измерялись на задней WSP.
На Dv0,5 на передней WSP не повлияло взаимодействие настройки внесения и типа распылителя, но основные эффекты типа распылителя (P<0,0001) и настройки внесения (P=0,0004) были существенными (Таблица 3). Распылители AIXR и ULD привели к большему Dv0,5 капель, осаждающихся на передней WSP, по сравнению с распылителями 3D-чередующийся и XR при объединении по настройке внесения (Таблица 7). Кроме того, распылитель TADF имел больший Dv0,5 капель, которые осаждались на передней WSP, по сравнению с распылителем XR. При объединении по типу распылителя осажденный Dv0,5 на передней WSP был больше для наземного оборудования при 93,5 л/га по сравнению с любой из настроек внесения RPAAS. Меньшие размеры капель от RPAAS могут ожидаться из-за нисходящего потока ротора, создающего потенциальный эффект сдвига ветра, который приводит к меньшим распределениям размера капель (Fritz и др., 2014a); однако этот эффект может быть более сложным, чем предполагалось изначально, поскольку некоторые начальные попытки измерения размера капель с работающим выше по потоку ротором привели к увеличению размера капель распыла по сравнению с неработающим ротором (Fritz and Butts, 2024). Тем не менее, необходимы дополнительные исследования для полной характеристики и понимания формирования распределения размера капель от RPAAS.
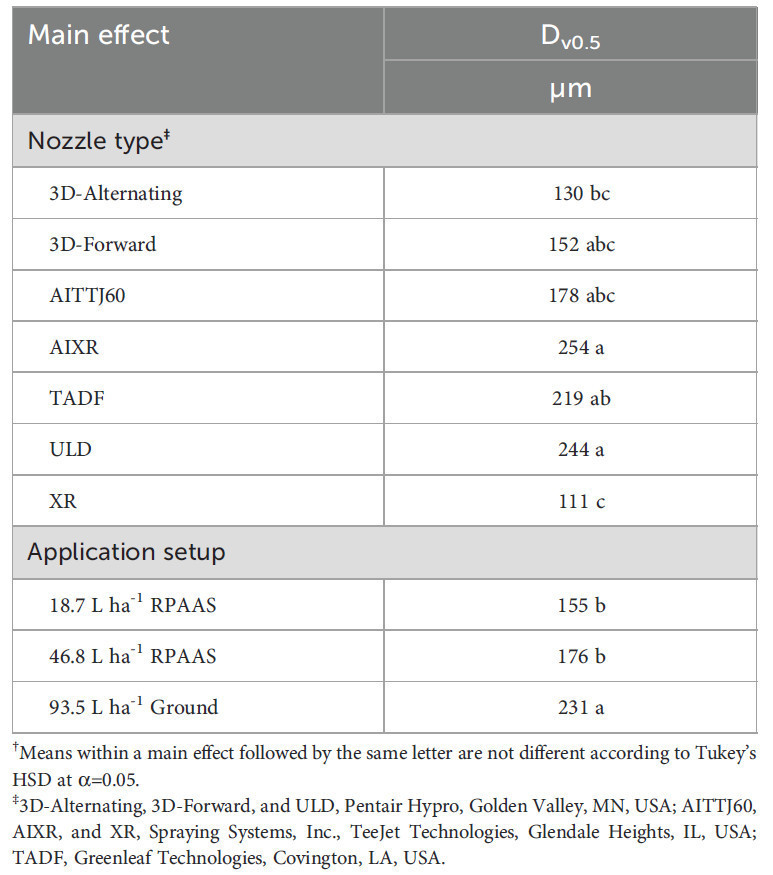
Таблица 7 – Dv0,5 (мкм), измеренный на передней (вертикальной) водочувствительной бумаге, в зависимости от основных эффектов настройки внесения [дистанционно пилотируемая авиационная система опрыскивания (RPAAS) при 18,7 и 46,8 л/га, и наземное опрыскивающее оборудование при 93,5 л/га] и типа или расположения распылителя†.
В дополнение к определению и пониманию Dv0,5 осажденных капель на WSP, была оценена взаимосвязь между измеренным Dv0,5 на WSP и стандартизированным процентом Dv0,5 на WSP, деленным на лабораторно измеренный Dv0,5 (Рисунок 2; Таблица 8). Результаты указали на модели наилучшего соответствия для трех различных групп распылителей: не-вентри (3D-чередующийся, 3D-прямой и XR), однофакельные вентри (AIXR и ULD) и двухфакельные вентри (AITTJ60 и TADF) со значениями коэффициента корреляции 0,96, 0,99 и 0,99 соответственно (Таблица 8). Для всех оцененных типов распылителей и настроек внесения измеренный Dv0,5 на WSP был меньше, чем лабораторно измеренный Dv0,5 (Рисунок 2). Диапазон измеренного Dv0,5 в процентах от лабораторных измерений составлял приблизительно от 60% до 85% для групп не-вентри и однофакельных вентри, в то время как для двухфакельных вентри он составлял приблизительно от 40% до 65%. Неясно, где могли осесть более крупные капли, что привело к уменьшенным диаметрам Dv0,5 на WSP. Поскольку тенденции были стабильными в пределах групп типов распылителей через настройки внесения, это указывало бы на то, что влияние RPAAS по сравнению с наземным опрыскивающим оборудованием не играло роли в том, какие диаметры капель оседали на карточках. Это может указывать на то, что более крупные диаметры капель не осаждались непосредственно в центре пути полета или движения, а вместо этого осаждались на внешних границах факелов распыла распылителей. Дополнительные исследования необходимы с множеством точек отбора проб через полосу распыла для подтверждения этой гипотезы. В целом, эти сравнительные результаты Dv0,5 предоставляют прогнозируемую взаимосвязь между измеренным на WSP и лабораторно измеренным лазерной дифракцией Dv0,5 как функцию конструкции типа распылителя. Это может быть полезно в будущих исследовательских проектах для составления прогнозов между лабораторными и полевыми измерениями, если исследователям доступен только один источник данных.
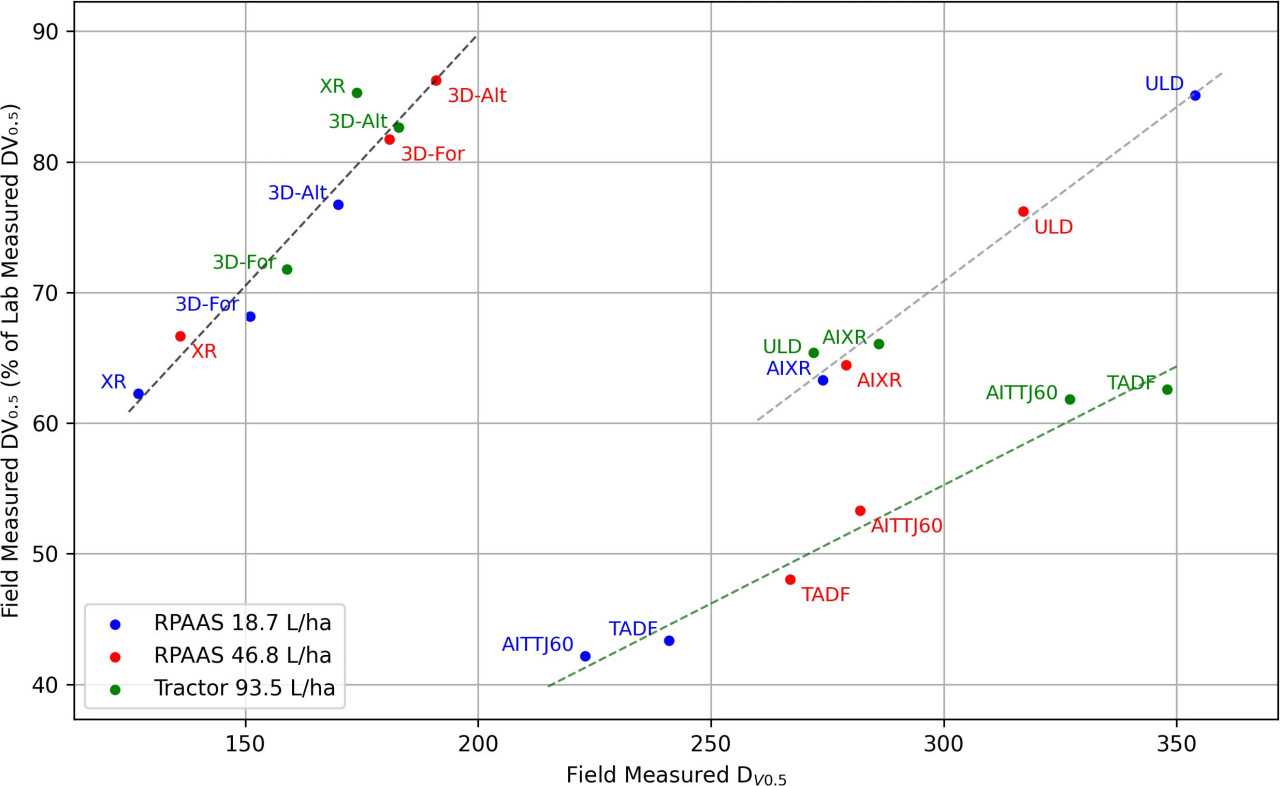
Рисунок 2 – Взаимосвязь между Dv0,5, измеренным на верхней водочувствительной бумаге (WSP), и Dv0,5 на WSP, выраженным в процентах от лабораторно измеренного Dv0,5. Линейные регрессии были подобраны для трех групп распылителей [Не-вентри (3D-Чередующийся, 3D-Прямой и XR; черная пунктирная линия), Однофакельные вентри (AIXR и ULD; серая пунктирная линия) и Двухфакельные вентри (AITTJ60 и TADF; зеленая пунктирная линия)] через настройки внесения.
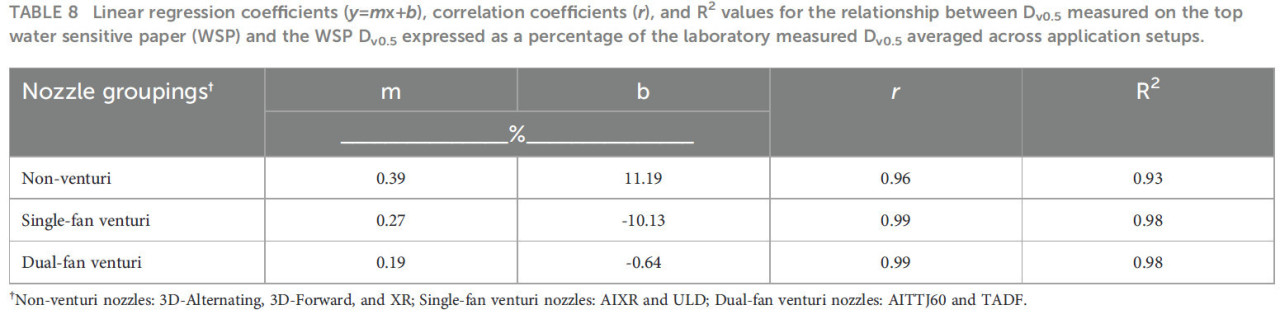
Таблица 8 – Коэффициенты линейной регрессии (y=mx+b), коэффициенты корреляции (r) и значения R² для взаимосвязи между Dv0,5, измеренным на верхней водочувствительной бумаге (WSP), и Dv0,5 на WSP, выраженным в процентах от лабораторно измеренного Dv0,5, усредненным по настройкам внесения.
3.3 Общее покрытие и общее осаждение по водочувствительной бумаге
После суммирования результатов из трех мест расположения WSP для получения измерения целостного покрытия и осаждения распыла произошло существенное взаимодействие настройки внесения и типа распылителя как для общего покрытия (P<0,0001), так и для общего осаждения (P<0,0001) (Рисунки 2, 3).
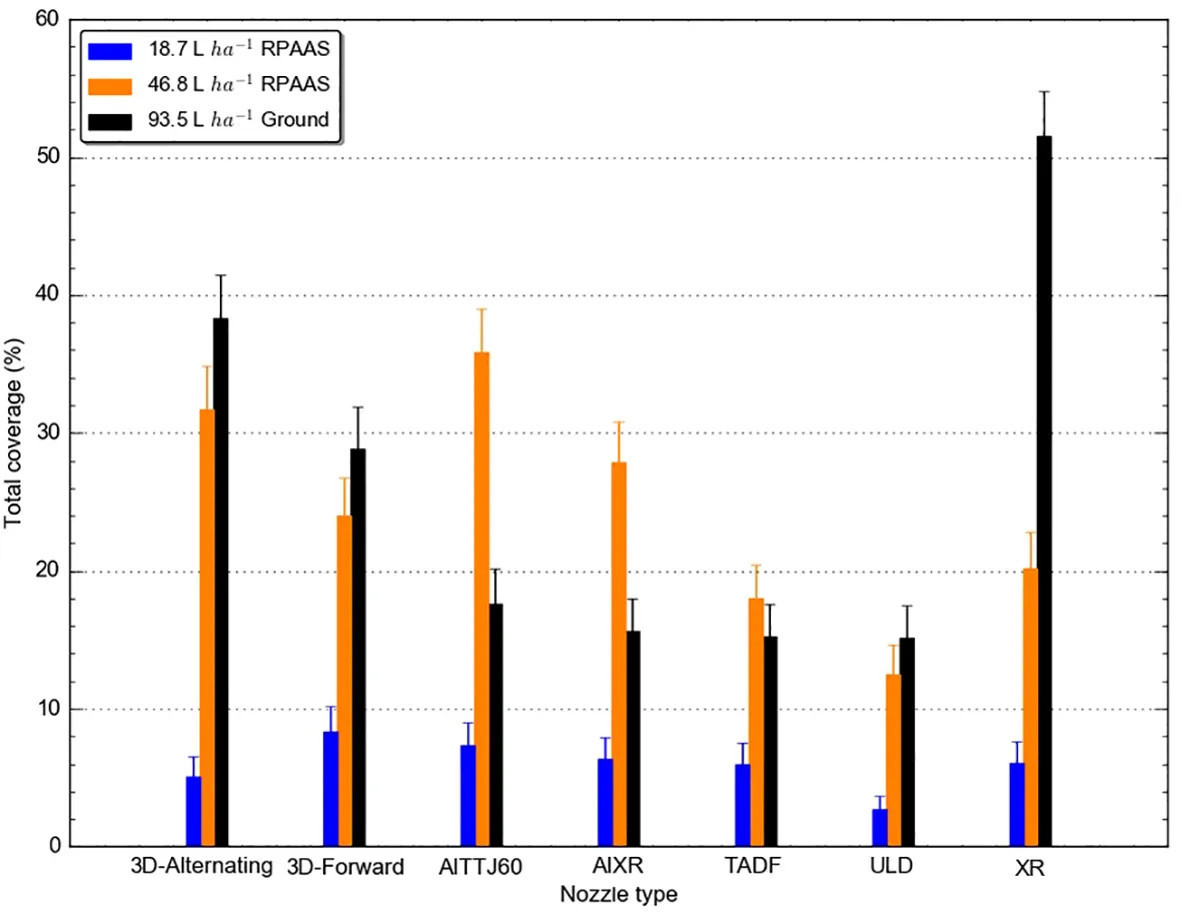
Рисунок 3 – Общее покрытие распылом (%), определенное по водочувствительной бумаге, в зависимости от семи типов или расположений распылителей через три настройки внесения [дистанционно пилотируемые авиационные системы опрыскивания (RPAAS) при 18,7 и 46,8 л/га, и наземное опрыскивающее оборудование при 93,5 л/га].
Наибольшее общее покрытие (>50%) наблюдалось от наземного оборудования при 93,5 л/га с использованием распылителя XR (Рисунок 3). Однако 5 из 8 комбинаций типа распылителя и настройки внесения, которые достигли по крайней мере 20% общего покрытия, были получены от RPAAS при 46,8 л/га. Ни один из распылителей, установленных на RPAAS, вносимых с 18,7 л/га, не обеспечил более 8% общего покрытия. Результаты общего покрытия указывали бы на то, что типы распылителей XR, 3D-чередующийся или 3D-прямой и типы распылителей AITTJ60, 3D-чередующийся или AIXR улучшили бы общее целостное покрытие от наземного оборудования и RPAAS (46,8 л/га) соответственно. Когда RPAAS работала при 18,7 л/га, влияние распылителя на общее покрытие было значительно минимизировано, и любой оцененный распылитель, за исключением ULD, мог быть использован, хотя и с пониженным потенциалом общего покрытия по сравнению с другими настройками внесения. Этот результат сходен с предыдущими исследованиями RPAAS, которые показали, что размер капель оказывает большее влияние на покрытие распылом при увеличении объема распыла (Shan и др., 2021).
Наибольшее общее осаждение (почти 1400 на см²) также наблюдалось от наземного оборудования при 93,5 л/га с использованием распылителя XR (Рисунок 4). Но аналогично общему покрытию, 5 из 8 обработок, которые дали наибольшее общее осаждение (>600 на см²), были получены от RPAAS при 46,8 л/га. RPAAS, использующая 18,7 л/га, оснащенная распылителями 3D-прямой, XR и AITTJ60, была более эффективна для общего осаждения, чем для общего покрытия, поскольку они обеспечили эквивалентное или большее общее осаждение, чем AITTJ60, ULD и TADF, установленные на наземном оборудовании при 93,5 л/га. Основываясь на общем осаждении, те же распылители (XR, 3D-прямой и 3D-чередующийся) из вышеупомянутых результатов общего покрытия были бы рекомендованы для использования на наземном опрыскивающем оборудовании. Однако XR, 3D-прямой и 3D-чередующийся обеспечили наибольшее общее осаждение при работе на RPAAS при 46,8 л/га. В результате, возможно, целесообразно использовать распылитель типа 3D-прямой с расположением на RPAAS, так как он был в тройке лучших вариантов для максимизации как общего покрытия, так и общего осаждения для обоих объемов распыла. Кроме того, распылители AITTJ60, AIXR и TADF могут быть рекомендуемыми вариантами для использования на системах RPAAS, особенно при 46,8 л/га, поскольку они улучшили как общее покрытие, так и общее осаждение по сравнению с наземным опрыскивающим оборудованием при 93,5 л/га. Более того, эти типы распылителей могут быть оптимальными вариантами для использования RPAAS в различных сценариях, поскольку они давали наибольшие размеры капель и классификации распыла (Чрезвычайно крупный, Очень крупный и Чрезвычайно крупный соответственно) (Таблица 2), и, как результат, снижали бы потенциал сноса распыла (Hunter и др., 2020a; Bonds и др., 2023; Martin и др., 2024).
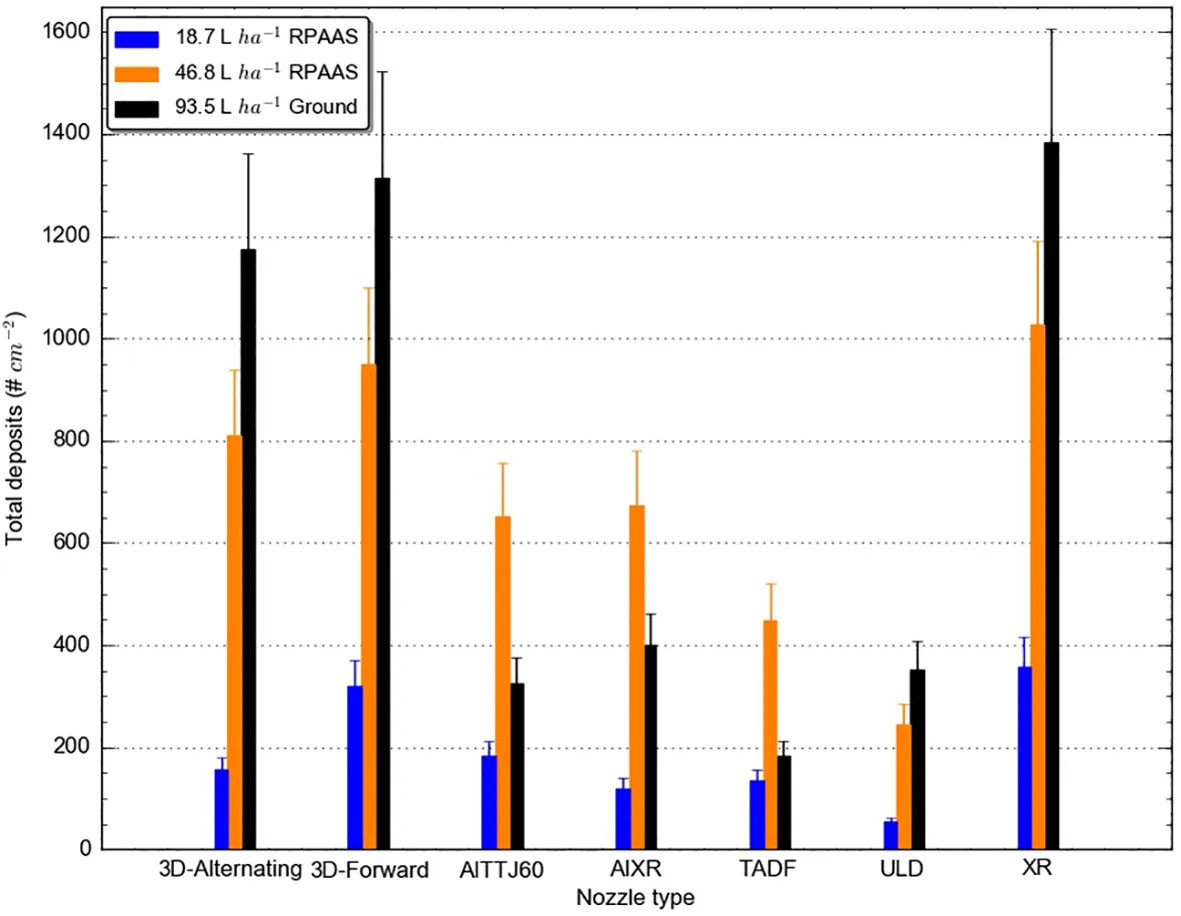
Рисунок 4 – Общее осаждение распыла (#/см²), определенное по водочувствительной бумаге, в зависимости от семи типов или расположений распылителей через три настройки внесения [дистанционно пилотируемые авиационные системы опрыскивания (RPAAS) при 18,7 и 46,8 л/га, и наземное опрыскивающее оборудование при 93,5 л/га].
Суммирование этих результатов указывает на то, что существует высокий потенциал для успешного применения RPAAS, особенно при 46,8 л/га, поскольку они стабильно обеспечивали эквивалентное покрытие и осаждение по сравнению с наземным оборудованием при 93,5 л/га через несколько протестированных типов распылителей. Результаты этого текущего исследования подтверждают предыдущие исследования RPAAS, которые показали, что большие объемы распыла в сочетании с распылителями, дающими более крупные капли, усиливают осаждение и борьбу с вредителями (Wang и др., 2019). Хотя обнадеживающие результаты были получены с RPAAS при 46,8 л/га, сниженное покрытие и осаждение, наблюдаемые у RPAAS при 18,7 л/га, является проблематичным, поскольку многие коммерческие операторы RPAAS в настоящее время вносят пестициды, используя от 9,4 до 28,1 л/га (T.R. Butts, личное наблюдение). Кроме того, этот сниженный объем распыла 18,7 л/га часто ниже предписанных на этикетке пестицида объемов распыла, что приводит к незаконным внесениям. Это исследование не оценивало эффективность пестицидов; однако другие исследования показали, что RPAAS с аналогичными уровнями осаждения и покрытия были успешны в борьбе с насекомыми (Qin и др., 2016; Huang и др., 2023), сорняками (Hunter и др., 2020b), болезнями (Wang и др., 2019; Delavarpour и др., 2023) и десикацией сельскохозяйственных культур (Liao и др., 2019). Несмотря на это, дополнительные исследования необходимы для определения последующей эффективности пестицидов от RPAAS в диапазоне параметров внесения, таких как действующие вещества, скорости полета, высоты полета и выбор распылителя, в сочетании с ультра-низкими объемами распыла, чтобы помочь в принятии решений аппликаторами и предоставить основу для возможных поправок к будущим этикеткам пестицидов.
4 Выводы
RPAAS при 46,8 л/га обеспечила сходное или большее покрытие и осаждение по сравнению с наземным оборудованием при 93,5 л/га по всем оцененным типам распылителей, за исключением распылителя XR. RPAAS при 18,7 л/га в целом привела к сниженному покрытию (<9% общего покрытия) и осаждению (<350 общих осаждений на см²) независимо от оцененного типа распылителя по сравнению с двумя другими настройками внесения. Осажденный Dv0,5, измеренный с помощью WSP, в целом был меньше, чем измерения полного распределения капель с помощью методов лазерной дифракции, и были обнаружены минимальные различия через настройки внесения в пределах типа распылителя. Это может указывать на то, что более крупные диаметры капель не осаждались непосредственно в центре пути полета или движения, а вместо этого осаждались на внешних границах факелов распыла распылителей, особенно с двухфакельными распылителями. В целом, эти сравнительные результаты Dv0,5 могут быть полезны в будущих исследовательских проектах для составления прогнозов между лабораторными и полевыми измерениями, если исследователям доступен только один источник данных.
В целом, распылители, дающие меньшие размеры капель (XR, 3D-чередующийся и 3D-прямой), будут рекомендованы для использования для улучшения покрытия и осаждения от наземного опрыскивающего оборудования; однако проблемы со сносом распыла могут изменить эти рекомендации. В целом, тип и расположение распылителя 3D-прямой могут быть рекомендованы на RPAAS независимо от объема распыла, когда снос распыла менее важен, для максимизации покрытия и осаждения. Тем не менее, типы распылителей AITTJ60, AIXR и TADF могут быть оптимальными вариантами для использования RPAAS, особенно при 46,8 л/га, поскольку они улучшили общее покрытие, общее осаждение и расчетный процент восстановления по сравнению с наземным опрыскивающим оборудованием при 93,5 л/га и дали наибольшие размеры капель, что снизило бы потенциал сноса распыла.
Результаты этого исследования показали, что покрытие, осаждение и размер капель, полученные в центре прохода опрыскивания от RPAAS при 46,8 л/га, могут быть эквивалентны наземному опрыскивающему оборудованию при 93,5 л/га в диапазоне типов распылителей и, следовательно, могут быть жизнеспособным вариантом для эффективного внесения пестицидов. Внесения с использованием RPAAS при 18,7 л/га привели к значительно меньшему покрытию и осаждению по оцененным типам распылителей и будут подвержены риску снижения эффективности пестицидов. Дополнительные исследования необходимы для оценки того, будут ли эти величины покрытия и осаждения от RPAAS при ультра-низких объемах достаточными для поддержания пестицидной эффективности на различных действующих веществах и в широком диапазоне параметров внесения.
Ссылки
1. ANSI/ASABE. (2020). Spray nozzle classification by droplet spectra (USA: American Society of Agricultural and Biological Engineers). 1–5, S572.3. CrossRef Google Scholar
2. Belluco S., Bertola M., Montarsi F., Martino G. D., Granato A., Stella R., et al. (2023). Insects and public health: an overview. Insects 14, 240. doi: 10.3390/insects14030240. CrossRef Google Scholar
3. Bonds J. A. S., Fritz B., Thistle H. W. (2023). Calculation of swath width and swath displacement for uncrewed aerial spray systems. J. ASABE 66, 523–532. doi: 10.13031/ja.15400. CrossRef Google Scholar
4. Butts T. R., Butts L. E., Luck J. D., Fritz B. K., Hoffmann W. C., Kruger G. R. (2019). Droplet size and nozzle tip pressure from a pulse-width modulation sprayer. Biosyst. Eng. 178, 52–69. doi: 10.1016/j.biosystemseng.2018.11.004. CrossRef Google Scholar
5. Creech C. F., Henry R. S., Fritz B. K., Kruger G. R. (2015). Influence of herbicide active ingredient, nozzle type, orifice size, spray pressure, and carrier volume rate on spray droplet size characteristics. Weed Technol. 29, 298–310. doi: 10.1614/WT-D-14-00049.1. CrossRef Google Scholar
6. Cunha M., Carvalho C., Marcal A. R. S. (2012). Assessing the ability of image processing software to analyse spray quality on water-sensitive papers used as artificial targets. Biosyst. Eng. 111, 11–23. doi: 10.1016/j.biosystemseng.2011.10.002. CrossRef Google Scholar
7. Delavarpour N., Koparan C., Zhang Y., Steele D. D., Betitame K., Bajwa S. G., et al. (2023). A review of the current unmanned aerial vehicle sprayer applications in precision agriculture. J. ASABE 66, 703–721. doi: 10.13031/ja.15128. CrossRef Google Scholar
8. FAA. (2024). Drones by the numbers. Available online at: https://www.faa.gov/node/54496 (Accessed April 29, 2024). CrossRef Google Scholar
9. FAOSTAT. (2021). Pesticide use database. Available online at: https://www.fao.org/faostat/en/data/RP (Accessed April 29, 2024). CrossRef Google Scholar
10. Feng H., Xu P., Yang S., Zheng Y., Li W., Liu W., et al. (2024). Back pressure generated by downwash and crosswind on spatial atomization characteristics during UAV spraying: CFD analysis and verification. Pest Manage. Sci. 80, 1348–1360. doi: 10.1002/ps.7865. CrossRef Google Scholar
11. Ferguson J. C., Hewitt A. J., O'Donnell C. C. (2016). Pressure, droplet size classification, and nozzle arrangement effects on coverage and droplet number density using air-inclusion dual fan nozzles for pesticide applications. Crop Prot. 89, 231–238. doi: 10.1016/j.cropro.2016.07.032. CrossRef Google Scholar
12. Fritz B. K., Butts T. R. (2024). "Influence of UAV rotor wash on spray droplet atomization: Implications for pesticide application and environmental risk," in STP1652: 43rd Symposium on Pesticide Formulation and Delivery Systems: Creating Certainty in an Uncertain World. Eds. Dye E., Green T. (PA, USA: ASTM International). In press. CrossRef Google Scholar
13. Fritz B. K., Hoffmann W. C., Bagley W. E., Kruger G. R., Czaczyk Z., Henry R. S. (2014a). Measuring droplet size of agricultural spray nozzles - measurement distance and airspeed effects. Atomization Spray 24, 747–760. doi: 10.1615/AtomizSpr.2014008424. CrossRef Google Scholar
14. Fritz B. K., Hoffmann W. C., Kruger G. R., Henry R. S., Hewitt A. J., Czaczyk Z. (2014b). Comparison of drop size data from ground and aerial application nozzles at three testing laboratories. Atomization Spray 24, 181–192. doi: 10.1615/AtomizSpr.2013009668. CrossRef Google Scholar
15. Gbur E. E., Stroup W. W., McCarter K. S., Durham S., Young L. J., Christman M., et al. (2012). Analysis of generalized linear mixed models in the agricultural and natural resources sciences (Madison, WI: American Society of Agronomy, Crop Science Society of America, Soil Science Society of America). doi: 10.2134/2012.generalized-linear-mixed-models. CrossRef Google Scholar
16. Gharde Y., Singh P. K., Dubey R. P., Gupta P. K. (2018). Assessment of yield and economic losses in agriculture due to weeds in India. Crop Prot. 107, 12–18. doi: 10.1016/j.cropro.2018.01.007. CrossRef Google Scholar
17. Hoffmann W. C., Hewitt A. J. (2005). Comparison of three imaging systems for water-sensitive papers. Appl. Eng. Agric. 21, 961–964. doi: 10.13031/2013.20026. CrossRef Google Scholar
18. Huang Z., Wang C., Wongsuk S., Qi P., Liu L., Qiao B., et al. (2023). Field evaluation of a six-rotor unmanned agricultural aerial sprayer: effects of application parameters on spray deposition and control efficacy against rice planthopper. Pest Manage. Sci. 79, 4664–4678. doi: 10.1002/ps.7666. CrossRef Google Scholar
19. Hunter J. E., Gannon T. W., Richardson R. J., Yelverton F. H., Leon R. G. (2020a). Coverage and drift potential associated with nozzle and speed selection for herbicide applications using an unmanned aerial sprayer. Weed Technol. 34, 235–240. doi: 10.1017/wet.2019.101. CrossRef Google Scholar
20. Hunter J. E., Gannon T. W., Richardson R. J., Yelverton F. H., Leon R. G. (2020b). Integration of remote-weed mapping and an autonomous spraying unmanned aerial vehicle for site-specific weed management. Pest Manage. Sci. 76, 1386–1392. doi: 10.1002/ps.5651. CrossRef Google Scholar
21. Iost Filho F. H., Heldens W. B., Kong Z., de Lange E. S. (2020). Drones: innovative technology for use in precision pest management. J. Economic Entomology 113, 1–25. doi: 10.1093/jee/toz268. CrossRef Google Scholar
22. Kim J.-S., Yoon S.-J., Park Y.-J., Kim S.-Y., Ryu C.-M. (2020). Crossing the kingdom border: Human diseases caused by plant pathogens. Environ. Microbiol. 22, 2485–2495. doi: 10.1111/1462-2920.15028. CrossRef Google Scholar
23. Knoche M. (1994). Effect of droplet size and carrier volume on performance of foliage-applied herbicides. Crop Prot. 13, 163–178. doi: 10.1016/0261-2194(94)90075-2. CrossRef Google Scholar
24. Lake J. R. (1977). The effect of drop size and velocity on the performance of agricultural sprays. Pestic Sci. 8, 515–520. doi: 10.1002/ps.2780080514. CrossRef Google Scholar
25. Legleiter T. R., Johnson W. G. (2016). Herbicide coverage in narrow row soybean as influenced by spray nozzle design and carrier volume. Crop Prot. 83, 1–8. doi: 10.1016/j.cropro.2016.01.009. CrossRef Google Scholar
26. Liao J., Zang Y., Luo X., Zhou Z., Lan Y., Zang Y., et al. (2019). Optimization of variables for maximizing efficacy and efficiency in aerial spray application to cotton using unmanned aerial systems. Int. J. Agric. Biol. Eng. 12, 10–17. doi: 10.25165/j.ijabe.20191202.4288. CrossRef Google Scholar
27. Martin D. E., Tang J., Yang Y., Latheef M. A., Fritz B. K., Kruger G. R., et al. (2024). Spray drift characterization of a remotely piloted aerial application system. Appl. Eng. Agric. 40, 385–399. doi: 10.13031/aea.15605. CrossRef Google Scholar
28. Matthews G., Bateman R., Miller P. (2014). Pesticide Application Methods. 4th Edition (UK: Wiley-Blackwell). CrossRef Google Scholar
29. Meng Y., Song J., Lan Y., Mei G., Liang Z., Han Y. (2019). Harvest aids efficacy applied by unmanned aerial vehicles on cotton crop. Ind. Crops Products 140, 111645. doi: 10.1016/j.indcrop.2019.111645. CrossRef Google Scholar
30. Miller P. C. H., Butler Ellis M. C. (2000). Effects of formulation on spray nozzle performance for applications from ground-based boom sprayers. Crop Prot. 19, 609–615. doi: 10.1016/S0261-2194(00)00080-6. CrossRef Google Scholar
31. Oerke E.-C. (2006). Crop losses to pests. J. Agric. Sci. 144, 31–43. doi: 10.1017/S0021859605005708. CrossRef Google Scholar
32. Ozkan E. (2024). Drones for spraying pesticides - Opportunities and challenges (The Ohio State University). Available online at: https://ohioline.osu.edu/factsheet/fabe-540 (Accessed April 29, 2024). CrossRef Google Scholar
33. Pimentel D. (2009). "Invasive plants: their role in species extinctions and economic losses to agriculture in the USA," in Management of Invasive Weeds. Ed. Inderjit (Dordrecht, Netherlands: Springer Dordrecht), 1–7. doi: 10.1007/978-1-4020-9202-2_1. CrossRef Google Scholar
34. Pimentel D., Zuniga R., Morrison D. (2005). Update on the environmental and economic costs associated with alien-invasive species in the United States. Ecol. Economics 52, 273–288. doi: 10.1016/j.ecolecon.2004.10.002. CrossRef Google Scholar
35. Priess G. L., Norsworthy J. K., Farr R. B., Mauromoustakos A., Butts T. R., Roberts T. L. (2021). Impact of auxin herbicides on Palmer amaranth (Amaranthus palmeri) groundcover. Weed Technol. 35, 768–778. doi: 10.1017/wet.2021.74. CrossRef Google Scholar
36. Qin W.-C., Qiu B.-J., Xue X.-Y., Chen C., Xu Z.-F., Zhou Q.-Q. (2016). Droplet deposition and control effect of insecticides sprayed with an unmanned aerial vehicle against plant hoppers. Crop Prot. 85, 79–88. doi: 10.1016/j.cropro.2016.03.018. CrossRef Google Scholar
37. Reed N. H., Butts T. R., Norsworthy J. K., Hardke J. T., Barber L. T., Bond J. A., et al. (2024). Evaluation of row width and nozzle selection on spray coverage and weed control in flooded rice. Weed Technol. 38, e40. doi: 10.1017/wet.2024.25. CrossRef Google Scholar
38. Research and Markets. (2023). *Crop spraying drones market - Forecasts from 2023-2028* (Knowledge Sourcing Intelligence LLP). Available online at: https://www.researchandmarkets.com/report/crop-spraying-drone (Accessed April 29, 2024). CrossRef Google Scholar
39. Ristaino J. B., Anderson P. K., Bebber D. P., Brauman K. A., Cunniffe N. J., Fedoroff N. V., et al. (2021). The persistent threat of emerging plant disease pandemics to global food security. Proc. Natl. Acad. Sci. U.S.A. 118, e2022239118. doi: 10.1073/pnas.2022239118. CrossRef Google Scholar
40. Sapkota M., Virk S., Rains G. (2023). Spray Deposition and Quality Assessment at Varying Ground Speeds for an Agricultural Sprayer with and without a Rate Controller. AgriEngineering 5, 506–519. doi: 10.3390/agriengineering5010033. CrossRef Google Scholar
41. Shan C., Wang G., Wang H., Xie Y., Wang H., Wang S., et al. (2021). Effects of droplet size and spray volume parameters on droplet deposition of wheat herbicide application by using UAV. Int. J. Agric. Biol. Eng. 14, 74–81. doi: 10.25165/j.ijabe.20211401.6129. CrossRef Google Scholar
42. Stroup W. W. (2012). Generalized Linear Mixed Models: Modern Concepts, Methods and Applications (Boca Raton, FL, USA: CRC Press, Taylor & Francis Group). CrossRef Google Scholar
43. Thacker J. R. M., Hall F. R. (1991). The effects of drop size and formulation upon the spread of pesticide droplets impacting on water-sensitive papers. J. Environ. Sci. Health Part B: Pesticides Food Contaminants Agric. Wastes 26, 631–651. doi: 10.1080/03601239109372760. CrossRef Google Scholar
44. Vitória E. L., Krohling C. A., Borges F. R. P., Ribeiro L. F. O., Ribeiro M. E. A., Chen P., et al. (2023). Efficiency of Fungicide Application an Using an Unmanned Aerial Vehicle and Pneumatic Sprayer for Control of Hemileia vastatrix and Cercospora coffeicola in Mountain Coffee Crops. Agronomy 13, 340. doi: 10.3390/agronomy13020340. CrossRef Google Scholar
45. Wang G., Lan Y., Qi H., Chen P., Hewitt A., Han Y. (2019). Field evaluation of an unmanned aerial vehicle (UAV) sprayer: Effect of spray volume on deposition and the control of pests and disease in wheat. Pest Manage. Sci. 75, 1546–1555. doi: 10.1002/ps.5321. CrossRef Google Scholar
46. Weed Science Society of America (WSSA). (2016). Facts about weeds. 3 (Westminster, CO, USA: Weed Science Society of America). CrossRef Google Scholar
47. Yallapa D., Kavitha R., Surendrakumar A., Suthakar B., Kumar A. P. M., Kannan B., et al. (2023). Influence of the downwash airflow in Hexacopter Drone on the spray distribution pattern of boom sprayer. J. Appl. Natural Sci. 15, 391–400. doi: 10.31018/jans.v15i1.4346. CrossRef Google Scholar
48. Zhan Y., Chen P., Xu W., Chen S., Han Y., Lan Y., et al. (2022). Influence of the downwash airflow distribution characteristics of a plant protection UAV on spray deposit distribution. Biosyst. Eng. 216, 32–45. doi: 10.1016/j.biosystemseng.2022.01.016. CrossRef Google Scholar
49. Zhu H., Salyani M., Fox R. D. (2011). A portable scanning system for evaluation of spray deposit distribution. Comput. Electron. Agric. 76, 38–43. doi: 10.1016/j.compag.2011.01.003. CrossRef Google Scholar
Butts TR, Fritz BK, Davis JA and Spurlock TN (2024) Spray coverage and deposits from a remotely piloted aerial application system using various nozzle types. Front. Agron. 6:1493799. doi: 10.3389/fagro.2024.1493799
Перевод статьи «Spray coverage and deposits from a remotely piloted aerial application system using various nozzle types» авторов Butts TR, Fritz BK, Davis JA and Spurlock TN., оригинал доступен по ссылке. Лицензия: CC BY. Изменения: переведено на русский язык
Фото: magnific















































































































Комментарии (0)