Разработка и испытания сквозного зажимного устройства для извлечения рассады из кассет с предварительным верхним рыхлением
Для решения существующих проблем автоматизированной пересадки рассады, таких как низкая эффективность извлечения и высокий процент потери субстрата, было разработано комбинированное устройство для извлечения рассады.
Аннотация
Оно работает по принципу предварительного рыхления верхнего слоя с последующим зажимом стебля. В качестве объекта исследования для испытания механических свойств стеблей были выбраны сеянцы перца из кассет. Были получены данные о прочности стеблей на растяжение и сжатие, а также построены кинематическая модель процесса выдергивания и механическая модель процесса зажима стебля. Проанализированы и рассчитаны ключевые параметры устройства для извлечения рассады, а также создана автоматизированная система для этой операции. С использованием таких факторов, как влажность субстрата, возраст рассады и частота извлечения, были проведены ортогональные эксперименты. Путем дисперсионного анализа и трехмерного анализа поверхности отклика были определены оптимальные округленные значения параметров: влажность субстрата 48%, возраст рассады 38 дней и частота извлечения 60 растений/мин. При этих условиях процент успешного извлечения рассады составил 94,44%, уровень потери субстрата — 6,07%, а уровень повреждения рассады — 4,17%, что соответствует требованиям автоматизированного извлечения рассады.
1. Введение
Технология пересадки овощной рассады по сравнению с прямым посевом имеет несколько преимуществ, включая сокращенные циклы роста, улучшенное использование земли и повышенную устойчивость к холоду и вредителям, что привело к ее широкому внедрению [1,2,3]. В настоящее время в КНР доминируют ручные и полуавтоматические методы пересадки, хотя эти практики страдают от таких проблем, как низкая эффективность извлечения рассады, высокая трудоемкость и значительные временные затраты [4,5,6,7]. По мере продвижения сельского хозяйства к большей интеллектуализации и точности традиционные механизированные технологии не соответствуют современным производственным требованиям. Автоматизированная технология выборки рассады, заменяя ручные операции механизированной точностью, может кардинально повысить эффективность и точность. Таким образом, разработка автоматизированных систем выборки рассады имеет ключевое значение для развития полностью автоматизированных пересадочных машин [8]. Будучи критически важным компонентом полностью автоматизированных пересадочных систем, качество извлечения рассады напрямую влияет на общую производительность операции пересадки [9]. Поэтому разработка механизма извлечения рассады, характеризующегося низким повреждением растений, высокой эффективностью извлечения и минимальными потерями субстрата, имеет первостепенное значение для повышения качества пересадки овощной рассады из кассет и продвижения исследований автоматизированного пересадочного оборудования [10,11,12].
Механизм извлечения рассады является основным компонентом полностью автоматизированных пересадочных машин и был предметом обширных исследований многочисленных ученых как внутри страны, так и за рубежом [13,14,15]. Khadatkar и др. [16] разработали роботизированный механизм извлечения рассады по принципу "втыкания", который интегрирует технологию позиционирования на основе датчиков. Эта система достигает высокого качества извлечения с уровнем потери рассады всего 7,6%. Однако механизм сложен и дорогостоящ. Liu и др. [17] разработали устройство для извлечения рассады с зажимом стебля на основе машинного зрения, адаптированное к характеристикам рассады томатов в кассетах. Система использует алгоритм YOLOv5 для точного управления захватами извлечения, обеспечивая интеллектуальную выборку рассады. Устройство достигает уровня повреждения 7,2% и успешности извлечения более 90,3%. Zhou и др. [18] разработали механизм извлечения рассады перца с использованием зонда в форме орлиного клюва, который включает кривошипный механизм, преобразованный в планетарный привод с нецилиндрической шестерней для соответствия требованиям к позе рассады в кассетах. За один оборот устройство захватывает два растения, повышая производственную эффективность и достигая максимального уровня успеха 96,4%. Однако его структура относительно сложна, а точность неоптимальна. Rahul и др. [19] разработали устройство для извлечения рассады с двумя степенями свободы на основе параллельных звеньев с пятью вращающимися сочленениями. Устройство использует двойной захват, установленный на сочленениях двух звеньев. Эта конструкция отличается простой структурой и высокой степенью автоматизации, но страдает от низкой эффективности извлечения и не подходит для высокоскоростной пересадки. Zhou и др. [20] также разработали пневмомеханическое гибридное устройство для извлечения рассады, отличающееся уменьшенной высотой толкателя и механизмом захвата, что минимизирует потери субстрата. Общий уровень успешного извлечения рассады этой системы составляет 91,69%. Hu и др. [21] предложили автоматическое устройство для извлечения рассады на основе зажимного стержня. Путем установления модели движения двойного кривошипно-шатунного механизма они оптимизировали траекторию для достижения высокой успешности извлечения рассады более 91,1%. Однако устройство работает на относительно низкой частоте извлечения.
В итоге, современные автоматизированные устройства для извлечения рассады демонстрируют относительно сложные структуры и склонны к таким проблемам, как неудачный захват рассады и повреждение блока субстрата в процессе извлечения. В данной статье представлена конструкция сквозного комбинированного устройства для извлечения рассады с верхним рыхлением и захватом стебля, которое использует пневматическое выталкивание и захват стебля для извлечения растений. Этот подход эффективно решает проблемы, такие как высокие потери субстрата и низкая успешность извлечения. Используя рассаду перца в качестве объекта испытаний, исследование измеряет ключевые физические параметры рассады в кассетах, устанавливает механические и кинематические модели и анализирует процессы захвата и выталкивания рассады. Определены ключевые параметры, и на основе методов сквозного извлечения рассады и равномерного распределения растений разработана автоматическая система извлечения рассады. Проведен ортогональный эксперимент для оптимизации рабочих параметров, тем самым проверены успешность и стабильность устройства. Результаты предоставляют ценную ссылку для разработки и проектирования полностью автоматизированной пересадочной техники.
2. Материалы и методы
2.1. Механические свойства рассады из кассет
Сквозная операция с верхним рыхлением и захватом стебля включает такие действия, как выталкивание, захват и извлечение рассады из кассет. В данном исследовании в качестве объектов испытаний были случайным образом отобраны 20 растений рассады перца в возрасте от 30 до 45 дней. Растущая среда состояла из смеси вермикулита, перлита и торфяного мха в соотношении 1:1:2. Все эксперименты проводились при комнатной температуре. Морфологические параметры и положения растений были откалиброваны, как показано на Рисунке 1, с результатами, обобщенными в Таблице 1. Механические свойства были протестированы и проанализированы с использованием анализатора текстуры TA.XT Plus с целью предоставления данных для поддержки структурного проектирования и оптимизации параметров устройства для извлечения рассады с верхним рыхлением и захватом стебля.
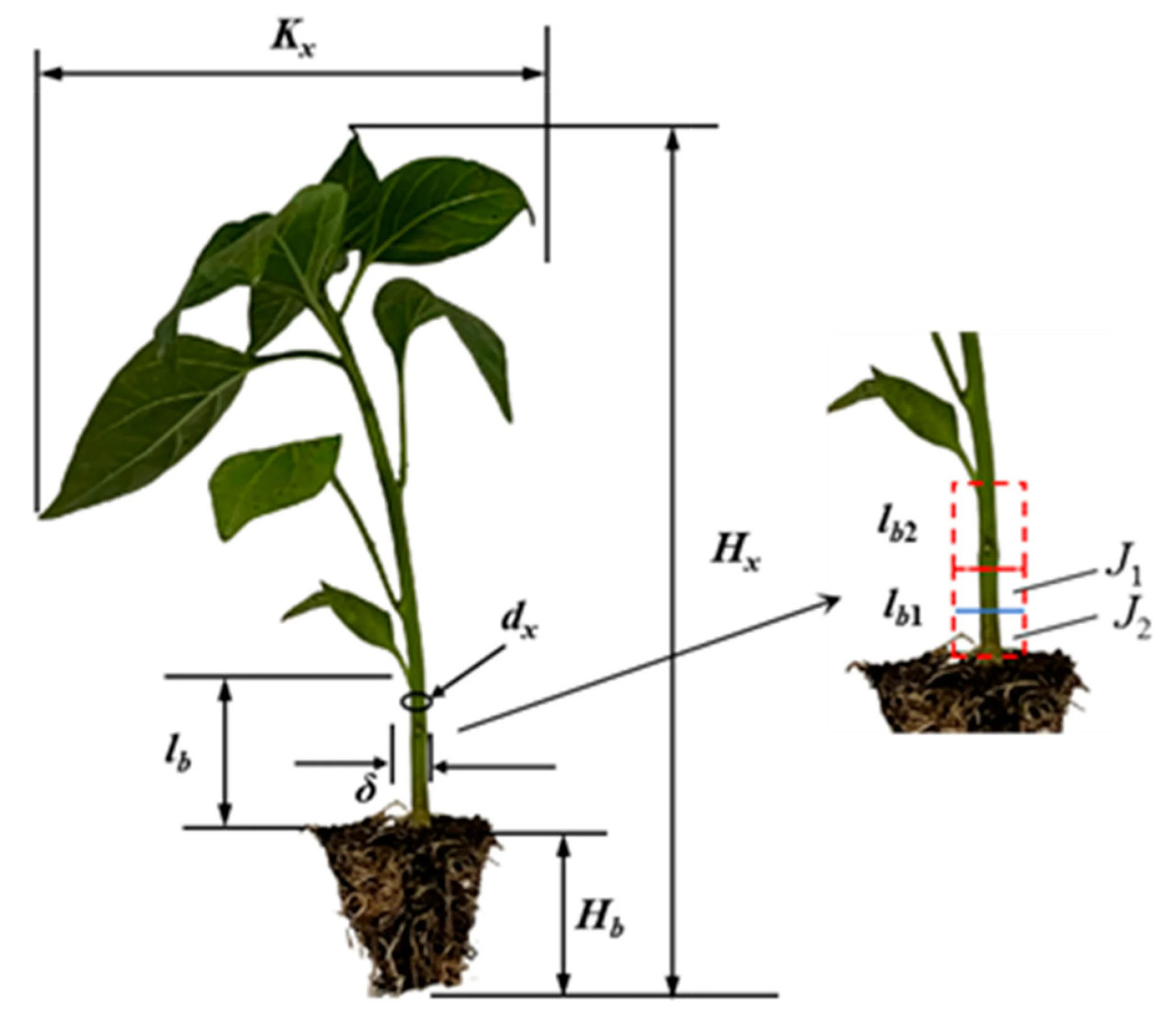
Рисунок 1. Морфология рассады из кассет. Kx — ширина листовой поверхности; Hx — общая высота растения в кассете; Hb — высота блока субстрата; dx — диаметр стебля; lb — расстояние от блока субстрата до первого листа; δ — смещение стебля от осевой линии; lbi — сегментация от низа блока субстрата до первого листа.
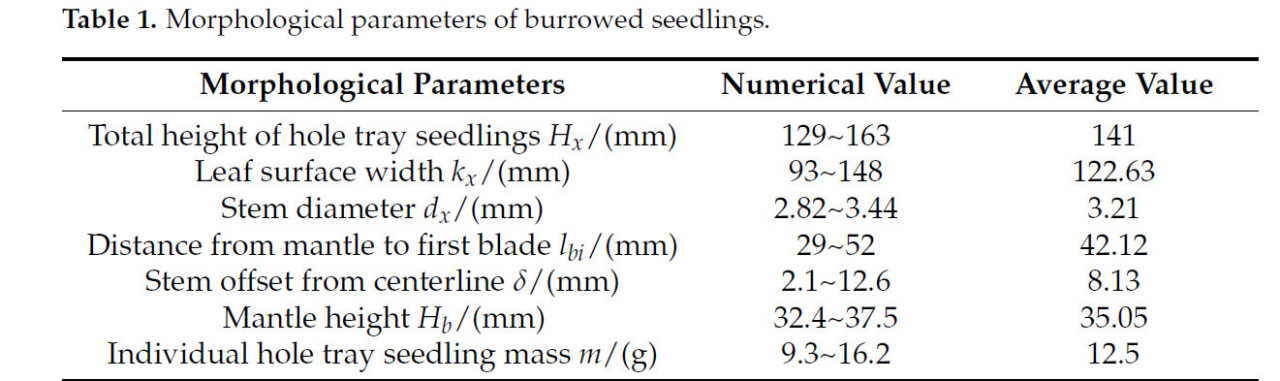
Таблица 1. Морфологические параметры рассады из кассет.
2.1.1. Тест на растяжение стебля
Чтобы точно
определить положения захвата и извлечения, стебель рассады был разделен на два
сегмента на основе размеров от блока субстрата до первого листа. Эти сегменты
были обозначены как lb1 (0–20 мм) и lb2 (20–40 мм). Процесс испытания на
растяжение проиллюстрирован на Рисунке 2а. Во время испытания стебель рассады
фиксировался с помощью растягивающего зажима и устанавливался на испытательный
стенд, сохраняя вертикальное выравнивание относительно горизонтальной
плоскости. Чтобы предотвратить повреждение или проскальзывание стебля во время
растяжения, что могло бы повлиять на результаты, позиции захвата оборачивались
марлей.
В эксперименте нижняя точка захвата располагалась ближе к концу блока
субстрата, а верхняя точка захвата — на вершине стебля. Начальный процесс
нагружения проводился с постоянной скоростью
1 мм/с, с растягивающим
перемещением 5 мм.
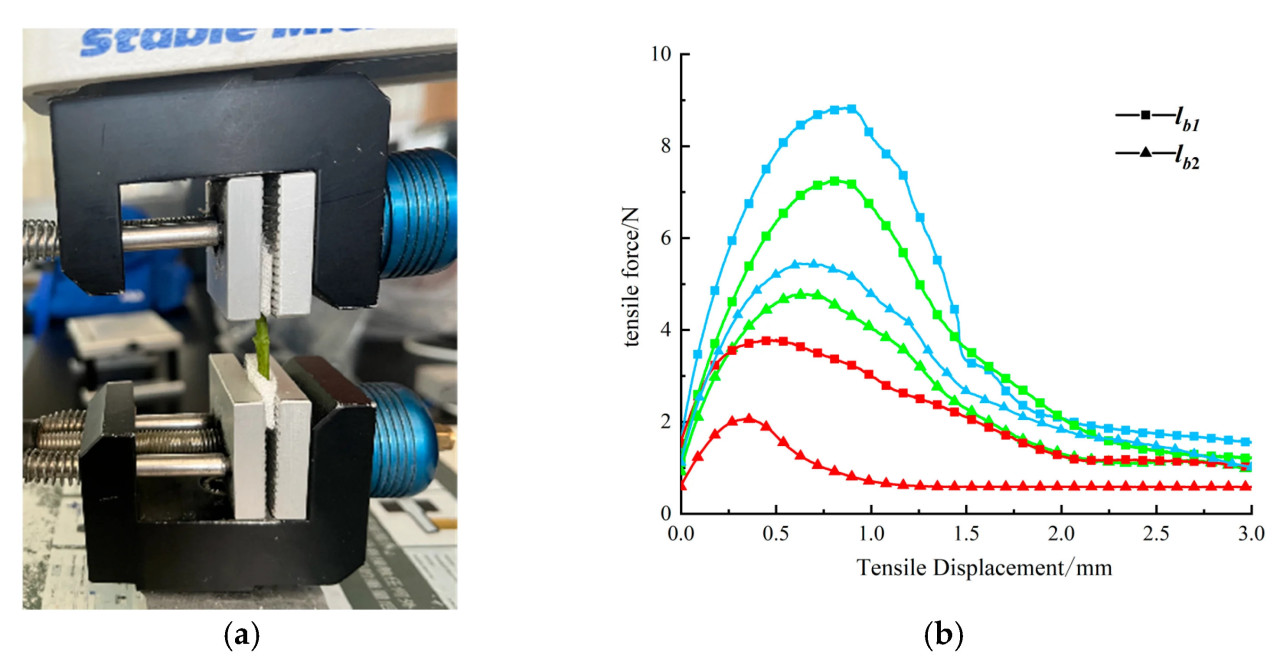
Рисунок 2. Тест на растяжение стебля. (a). Эффект испытания на растяжение; (b). Кривые растягивающего усилия в зависимости от перемещения (Кривые одного цвета являются кривыми изменения различных позиций нагружения одного растения в кассете).
Из кривой растягивающего усилия в зависимости от перемещения, показанной на Рисунке 2b, можно наблюдать, что кривая разделена на три различных сегмента. Первый сегмент показывает стабильное увеличение прочности стебля на растяжение по мере увеличения перемещения, достигая точки разрыва. Во втором сегменте после достижения разрушающего усилия растягивающее усилие начинает уменьшаться по мере продолжения перемещения, в конечном итоге приближаясь к нулю. Третий сегмент показывает поведение после разрушения, где стебель демонстрирует значительные неупругие характеристики; растягивающее усилие больше не пропорционально дальнейшему перемещению и не увеличивается с ним. В пределах одного растения позиция захвата заметно влияет на прочность стебля на растяжение. Прочность на растяжение в сегменте lb1 больше, чем в сегменте lb2, что указывает на то, что более высокие позиции захвата приводят к снижению прочности на растяжение. Это происходит потому, что сегмент lb1, тесно связанный с блоком субстрата, имеет более высокую прочность из-за обилия питательных веществ и более толстых волокон. Однако по мере подъема позиции захвата диаметр стебля постепенно уменьшается, что приводит к снижению прочности на растяжение. Учитывая эти факторы, сегмент lb1 выбран в качестве оптимальной области извлечения. Кроме того, сегмент lb1 разделен на две части, J1 и J2, от корня до вершины, каждая длиной 10 мм. Однако, чтобы избежать помех между механизмом захвата и блоком субстрата, оптимальная область захвата определена как сегмент J1 (10–20 мм).
2.1.2. Тест на сжатие стебля
Чтобы точно оценить необходимое усилие захвата для механизма извлечения рассады и избежать повреждения стебля из-за чрезмерного сжатия, необходимо исследовать характеристики сжатия стебля. Как определено в Разделе 2.1.1, тестовая точка расположена у основания стебля рассады перца, конкретно в сегменте lb1 (0–20 мм) от корневого конца. Тест на сжатие показан на Рисунке 3а. Сначала образец помещался плоско между металлической пластиной и датчиком, угол точно регулировался, чтобы гарантировать, что стебель находится непосредственно под датчиком, обеспечивая плотный контакт и равномерное распределение усилия. В эксперименте коэффициент сжатия был установлен на 60%, что означает, что во время движения датчика вниз сжатая длина стебля составляла 60% от его диаметра. Скорость нагружения была установлена на 10 мм/мин — скорость, которая предотвращает повреждение стебля и позволяет точно собирать данные.
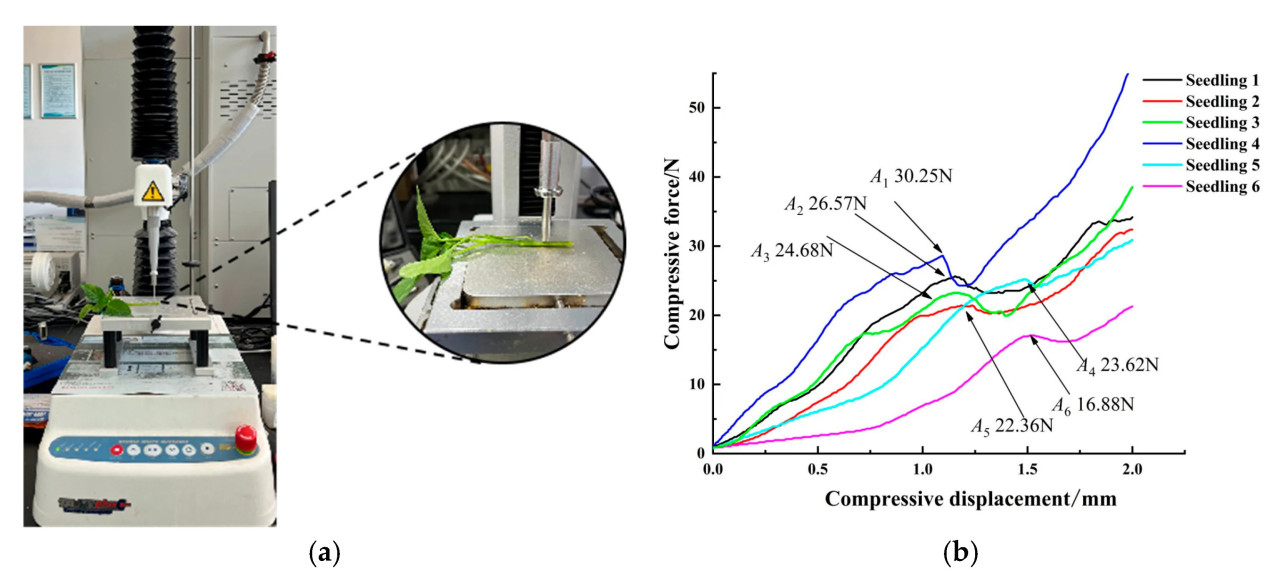
Рисунок 3. Тест характеристик сжатия стебля. (a). Схема испытания на сжатие; (b). График усилия сжатия в зависимости от перемещения.
Как показано на Рисунке 3b, кривая деформации характеристик сжатия стебля схожа и может быть разделена на две стадии. Сегмент OA представляет упругую фазу, где сжимающая нагрузка увеличивается линейно с перемещением сжатия. В течение этой фазы сжимающее усилие мало влияет на стебель, и как только нагрузка снята, стебель может восстановиться самостоятельно. Точка A называется точкой биологического предела текучести. После точки A начинается вторая фаза, где сжимающая нагрузка продолжает увеличиваться, приводя к разрыву клеток эпидермиса стебля, повреждая его структуру. В результате стебель не может вернуться в нормальное состояние, влияя на последующий рост и развитие и ставя под угрозу качество пересадки. Измеренное среднее усилие текучести в точке A составляет 24,06 Н. При проектировании механизма захвата усилие захвата должно поддерживаться ниже этого критического значения, обеспечивая сохранение целостности стебля и достижение успеха пересадки.
2.2. Структура и принцип работы машины в целом
2.2.1. Структура машины в целом
Данное исследование фокусируется на овощной кассете для рассады на 72 ячейки (6 × 12), и разработанное автоматическое устройство для извлечения рассады использует комбинированную механическую, электрическую и пневматическую систему для выполнения таких действий, как автоматическая подача кассет, подъем рассады, захват растений, распределение и размещение рассады. Устройство, как показано на Рисунке 4, состоит из рамы, конвейера для кассет, механизма подъема рассады, механизма извлечения рассады, механизма прижимной пластины и системы управления. Механизм извлечения рассады состоит из концевого эффектора для рассады (параллельные пневматические захваты), пневмоцилиндра подъема, пневмоцилиндра перемещения и ножничного механизма. Цель механизма извлечения рассады — извлекать каждое растение из кассеты по одному. Путем точного управления траекторией он гарантирует, что каждое растение точно помещается в предназначенный стаканчик для рассады, таким образом упрощая процесс извлечения и повышая эффективность пересадки. Общая стратегия управления механизмом извлечения рассады следует последовательности извлечение рассады — распределение — размещение. После того как растения выталкиваются из кассеты, они захватываются концевым эффектором, и распределение контролируется ножничным механизмом, который приводится в действие распределительным пневмоцилиндром, завершая таким образом один цикл извлечения.
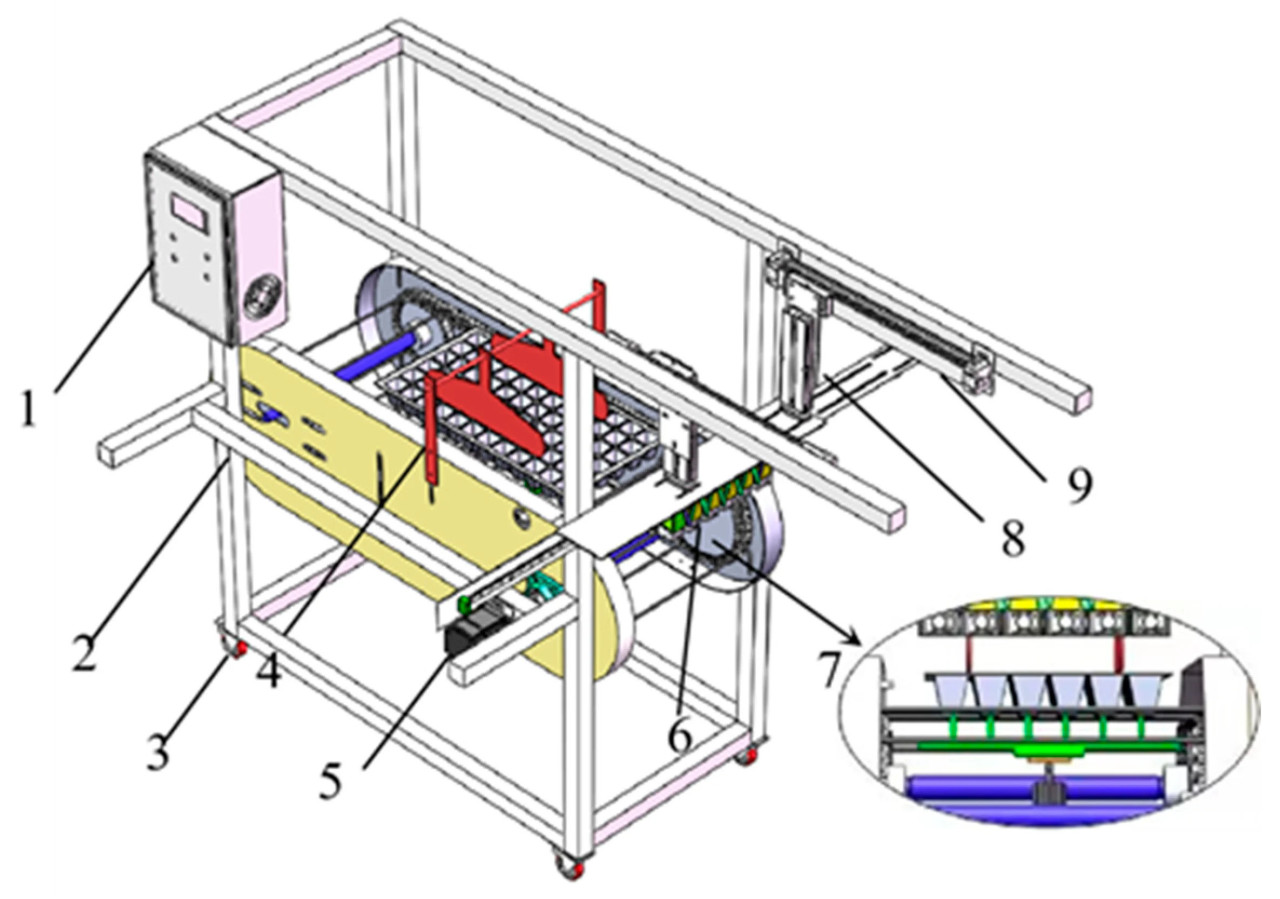
Рисунок 4. Полная схема устройства для извлечения рассады. 1. Управляющий блок; 2. Рама; 3. Ролики; 4. Механизм прижимной пластины; 5. Мотор; 6. Механизм распределения рассады; 7. Механизм верхнего выталкивания рассады; 8. Подъемный механизм; 9. Механизм перемещения.
2.2.2. Принцип работы
Процесс работы механизма извлечения рассады и движение растений проиллюстрированы на Рисунке 5. Кассеты с рассадой равномерно размещаются на конвейере для кассет. Во время работы толкающий стержень служит для поддержки и позиционирования кассет. Под вращением шагового двигателя кассета перемещается в заданную позицию извлечения рассады. Когда шаговый двигатель останавливается, процесс извлечения рассады начинается с помощью механизма подъема и захвата. Процесс извлечения состоит из пяти этапов:
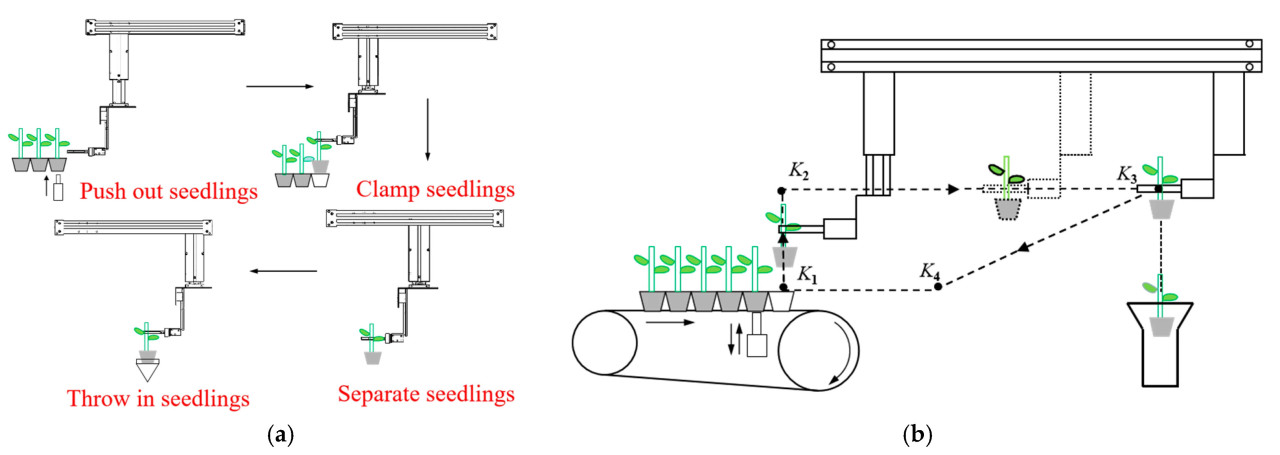
Рисунок 5. Схема механизма извлечения рассады. (a). Блок-схема процесса извлечения рассады (Направление стрелки представляет шаг движения процесса извлечения рассады); (b). Диаграммы преобразования положения кассеты (Направление стрелки представляет траекторный путь концевого эффектора устройства для извлечения рассады).
(1) Подъем рассады: После точного позиционирования кассеты дренажные отверстия совмещаются с толкающим стержнем. Датчик положения обнаруживает кассету и отправляет сигнал подъемному цилиндру, который выдвигается и выталкивает растения на заданное перемещение;
(2) Захват рассады: Подъемный пневмоцилиндр опускается в позицию захвата (точка K1), совмещаясь с кассетой для рассады. Концевой эффектор механизма извлечения рассады закрывается, захватывая стебель растения;
(3) Извлечение рассады: Как только растение захвачено, подъемный пневмоцилиндр поднимается, вытягивая растение из кассеты. Движение следует по траектории от K1 до K2;
(4) Распределение рассады: Пневмоцилиндр перемещения двигается горизонтально, и распределительный механизм выдвигается, чтобы распределить растения над соответствующими стаканчиками для рассады. Движение следует по траектории от K2 до K3;
(5) Размещение рассады: Концевой эффектор открывается, и растение падает под действием силы тяжести в стаканчик для рассады, завершая процесс извлечения. Впоследствии все цилиндры возвращаются в исходные положения. В течение этого процесса шаговый двигатель работает, чтобы переместить кассету с рассадой вперед до позиции датчика. Затем концевой эффектор возвращается в точку K1, и движение следует по траектории от K3 до K4 и обратно к K1. Этот цикл повторяется для завершения автоматизированного извлечения рассады.
2.3. Проектирование и анализ оптимизации ключевых компонентов
2.3.1. Проектирование Ножничного Механизма
Для повышения точности и стабильности процесса распределения рассады в полностью автоматизированном механизме извлечения рассады по принципу сквозного подъема и захвата стебля разработан экономичный, простой и стабильный ножничный распределительный механизм для обеспечения равномерного и постоянного распределения растений концевым эффектором. Механизм, как показано на Рисунке 6, состоит из параллельных компонентов, включая направляющую, скользящие блоки, распределительные пластины для рассады и ножничные пластины, которые скреплены болтами. Два конца ножничных пластин соединены шарнирными штифтами для обеспечения горизонтального расширения в процессе распределения рассады. Направляющая механизма распределения рассады оснащена шестью скользящими блоками, каждый из которых соединен с распределительной пластиной. Один конец механизма фиксируется стопорным блоком для закрепления скользящих блоков, в то время как другой конец спроектирован как подвижный. Распределительный цилиндр прикручен к шестому скользящему блоку, обеспечивая входную мощность для приведения механизма в возвратно-поступательное движение. Во время извлечения рассады ножничный механизм находится в сжатом состоянии, совмещаясь с ячейками кассеты. В процессе распределения механизм расширяется и расходится, соответствуя стаканчикам для рассады на конвейерной цепи.
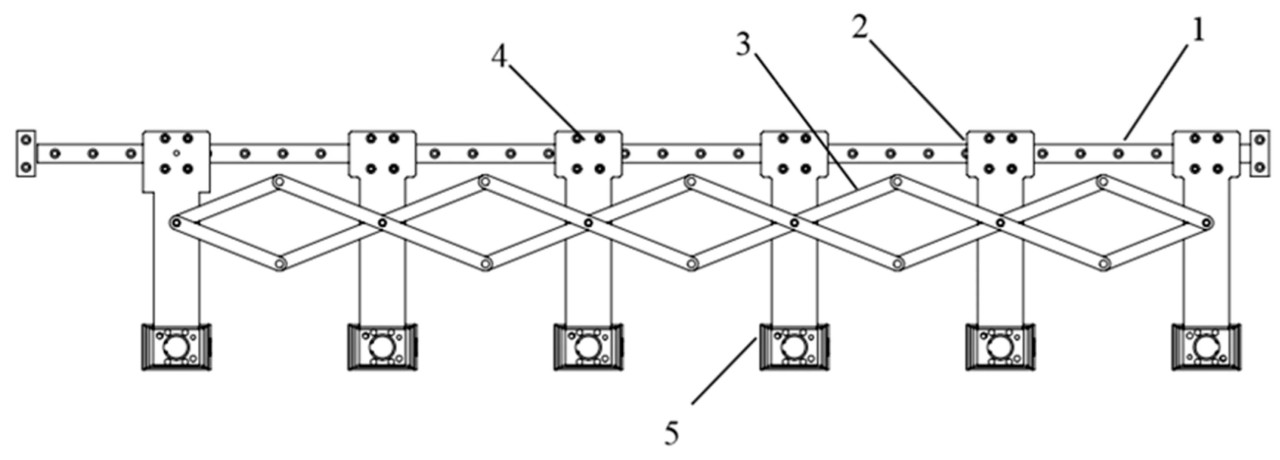
Рисунок 6. Трехмерная модель ножничного механизма. 1. Направляющая; 2. Скользящий блок; 3. Ножничная пластина; 4. Распределительная пластина для рассады; 5. Концевой эффектор для захвата рассады.
Анализ движения ножничного механизма
Ножничный механизм распределения рассады предлагает многочисленные преимущества, такие как низкая стоимость и простая структура. Усилие Fw приложено к свободному концу распределительного механизма, чтобы обеспечить поступательное скольжение и равноудаленное расхождение. На гибкой конвейерной цепи для рассады расстояние C между двумя соседними стаканчиками для рассады составляет 118 мм, в то время как расстояние B между двумя ячейками в стандартной кассете на 72 ячейки составляет 43 мм. Ширина скользящего блока должна быть меньше расстояния B, а ширина распределительной пластины должна быть такой же, как зазор между соседними скользящими блоками в закрытом состоянии, что также составляет 43 мм. Это гарантирует правильное совмещение стаканчиков для рассады и облегчает точный захват стеблей. Прямоугольная система координат установлена с началом в неподвижном конце. Направление распределения рассады принято за ось x, а вертикальное направление — за ось y, как показано на Рисунке 7. На этой основе выводятся уравнения:

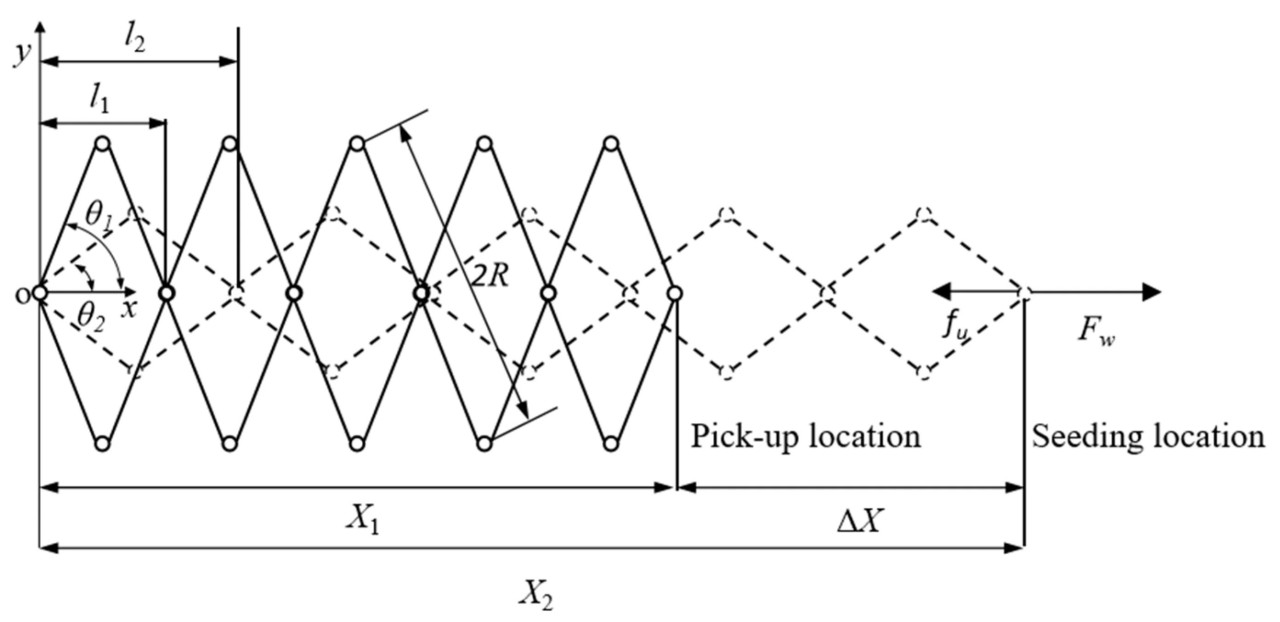
Рисунок 7. Эскиз движения ножничного механизма.
В формуле, l1 — расстояние между соседними скользящими блоками, когда ножничный механизм закрыт; l2 — расстояние между соседними скользящими блоками, когда ножничный механизм расходится; 2R — длина плеча ножничного рычага механизма; θ1 — угол между осевой линией плеча ножничного рычага и вертикальным направлением прямой пластины, когда она закрыта; θ2 — угол между осевой линией плеча ножничного рычага и вертикальным направлением прямой пластины, когда она расходится; X1 — расстояние от распределительной пластины до неподвижного конца при закрытии; X2 — расстояние от распределительной пластины до неподвижной пластины при расхождении, мм; ΔX — ход расширения и сжатия распределительного цилиндра.
Это дает длину плеча ножничного рычага, как следует:

Ход цилиндра:

В общем случае, θ1 не должен превышать 80°, чтобы предотвратить чрезмерное увеличение усилия при втягивании цилиндра механизма ножничной вилки, так как большие углы θ1 приводят к более высоким тяговым усилиям. В то же время, θ2 должен оставаться в разумных пределах [22]: если θ2 меньше 35°, уменьшение угла мало влияет на ход ножничного механизма и может привести к нестабильности; наоборот, если θ2 превышает 50°, полный потенциал плеча ножничного рычага не может быть использован. Установив θ1 равным 76° и θ2 равным 41°, вместе с размерами, такими как l1 = 43 мм и l2 = 118 мм, и подставив эти значения в уравнения (2) и (3), получаем округленные результаты: 2R = 146 мм и изменение размера ΔX составляет 447 мм.
Когда распределительный цилиндр рассады выдвигается, из-за очень короткого времени ускорения его можно считать движением с равномерным ускорением. Ускорение и замедление рассады в процессе распределения значительно влияют на субстрат растения. Поэтому необходимо уменьшить ускорение скользящего блока. В случае частоты извлечения рассады 90 растений/мин, цикл извлечения занимает 4 с, а время работы распределительного цилиндра составляет t1 = 0,8 с.

В формуле, v1 — максимальная скорость цилиндра при выдвижении, м/с; t1 — время движения цилиндра, с; a1 — ускорение цилиндра на скользящем блоке, м/с²; t2 — время цилиндра в фазе ускорения, с.
Предполагая, что скользящие блоки жестко соединены друг с другом и игнорируя натяжение между каждой ножничной пластиной, они подвергаются равному трению, которое получается согласно второму закону Ньютона:

В формуле, Fw — усилие натяжения распределительного цилиндра рассады, Н; fu — трение между одиночным скользящим блоком и направляющей, Н; mw — общая масса концевого эффектора для извлечения рассады, кг.
Во время выдвижения распределительного цилиндра рассады фаза ускорения, контролируемая соленоидным клапаном, очень короткая, за ней следует равномерное движение. Если ускорение в процессе распределения слишком велико, движение становится резким, вызывая заметную тряску механизма, что, в свою очередь, приводит к повреждению блоков субстрата. Поэтому необходимо уменьшить ускорение скользящего блока. Время ускорения t2 установлено на 0,1 с, а общая масса концевого эффектора, mw, составляет 0,5 кг (включая цилиндр захвата рассады, захватную пластину и распределительную пластину). Трение между скользящим блоком и направляющей предполагается катящимся трением с коэффициентом трения μ1, установленным на 0,15. Подставив в формулу (5), получаем минимальное тяговое усилие распределительного цилиндра рассады, равное 17,72 Н. Ход цилиндра должен быть больше возвратно-поступательного хода ΔX ножничного механизма. Мы выбрали цилиндр типа ручки MAL20-450 в качестве распределительного цилиндра для рассады, который соответствует проектным требованиям согласно соответствующему руководству.
2.3.2. Устройство для захвата рассады
Проектирование устройства для захвата рассады
Механизм захвата рассады использует пневматическую систему, которая предлагает такие преимущества, как быстрый отклик, точность и стабильность. Он состоит из параллельных цилиндров-пальцев и захватных пластин. Путем управления открытием и закрытием соленоидного клапана активируются параллельные цилиндры-пальцы, приводя в движение захватные пластины для открывания и закрывания, позволяя захватывать и размещать растения в кассете. Этот механизм играет ключевую роль в обеспечении автоматизации извлечения и размещения рассады.
Чтобы обеспечить точный захват стеблей рассады, должны быть рассмотрены следующие проектные требования: (1) когда захватные клешни открыты, должно быть исключено взаимодействие между соседними клешнями для обеспечения плавной работы; (2) в процессе захвата угол клешней должен быть тщательно контролируем, чтобы приспособиться к растениям, которые могут отклоняться от центра кассеты, предотвращая неудачу захвата; и (3) при закрытии усилие захвата должно быть умеренным, избегая чрезмерного давления, которое может повредить стебли. Структурные параметры показаны на Рисунке 8.
Рисунок 8. Диаграмма структурных параметров устройства для захвата рассады. (a) Диаграмма структурных параметров концевого эффектора для извлечения рассады; (b) Вид сбоку D — диаметр верхнего отверстия ячейки кассеты. L — длина консоли параллельного цилиндра, захватывающего стебель растения в кассете; Zj1, Zj2, Zj3 — длина, ширина и толщина захватной пластины в позиции захвата; Lq1 — расстояние между захватными клешнями, когда захват для рассады открыт; Lq2 — длина открывающейся пластины; µ — угол раскрытия V-образной пластины; hr — расстояние между нижней частью захватной пластины и блоком субстрата.
Основываясь на вышеуказанных трех требованиях, чтобы гарантировать, что захватная пластина может успешно захватывать стебли растений и приспосабливаться к потенциальным отклонениям верхушек растений от центра, передний конец пластины спроектирован как V-образная структура с отверстием, которая служит для направления и совмещения стеблей. Если длина V-образной пластины слишком велика, она может повредить соседние растения, а если слишком коротка, она не сможет эффективно захватывать растения. Поэтому длина и угол раскрытия пластины должны удовлетворять следующим условиям:

В формуле, Lq1 — расстояние между захватными клешнями, когда захват для рассады открыт, мм; Lq2 — длина открывающейся пластины, мм; D — диаметр верхнего отверстия ячейки кассеты, мм; µ — угол раскрытия V-образной пластины, °.
Основываясь на анализе данных физических характеристик рассады, обнаружено, что для кассет с рассадой возрастом 30–50 дней диаметр стебля варьируется от 2,82 до 3,44 мм. Чтобы имитировать действие ручного зажима стеблей рассады, на обе стороны захватных пластин прикреплены губчатые прокладки толщиной 1 мм для увеличения эластичности и предотвращения чрезмерного давления, которое может вызвать повреждение стеблей. Поэтому выбрано расстояние закрытия приблизительно 5 мм, чтобы обеспечить правильный захват стебля без падения растений. Учитывая расстояние закрытия клешней, толщина захватных пластин установлена на 5 мм. Чтобы обеспечить успешный захват, расстояния установлены следующим образом: Zj1 = 20 мм, Zj2 = 5 мм и Zj3 = 8 мм, что дает расстояние захвата Lq1 10,9 мм. Используя стандартную кассету для рассады на 72 ячейки, верхняя длина D каждой ячейки составляет 40 мм. В процессе зажима угол V-образной пластины не должен мешать соседним кассетам. Подставив данные в уравнение (6), были получены оптимизированные параметры: µ = 150° и Lq2 = 30 мм.
Механический анализ процесса захвата стебля
Чтобы обеспечить плавное выполнение процесса захвата, был проведен детальный механический анализ фазы захвата стебля. В течение всего процесса извлечения рассады, после завершения действия верхнего рыхления, адгезионная сила и трение между блоком рассады и стенкой кассеты постепенно уменьшаются до достижения стабильного состояния. В этот момент, при подъеме растения в захваченном состоянии, нужно преодолеть только собственный вес растения [23]. Чтобы минимизировать повреждение стебля, были изучены условия усилия во время процесса захвата, что привело к выбору соответствующего цилиндра захвата и рациональному проектированию зазора между захватными пластинами. Как показано на Рисунке 9, установив уравнение равновесия сил, мы определили величину и направление усилия, необходимого для подъема растения в захваченном состоянии.
Рисунок 9. Анализ процесса усилия при захвате стебля и извлечении рассады. (a) Вид сверху; (b) Вид сбоку. 1. Цилиндр захвата рассады; 2. Захватная пластина для рассады; 3. Стебель растения в кассете.
При обычной работе, после захвата стеблей, растения поднимаются цилиндром, заставляя их отделиться от кассеты. Согласно принципу Д'Аламбера, необходимо учитывать фиктивные инерционные силы, действующие на растения в этот момент. В результате растения проявляют определенное мгновенное восходящее ускорение, обозначенное как am, которое может быть выведено из уравнения, связывающего перемещение и ускорение.

В формуле, xm — ход подъемного цилиндра, м; vm — начальная скорость, м/с; tm — время подъема вверх, с; am — мгновенное ускорение при извлечении, м/с².
При работе с захватывающими цилиндрами часто добавляется коэффициент безопасности S, чтобы предотвратить падение рабочего объекта и обеспечить плавный захват. Баланс сил имеет

В формуле, f1 — коэффициент трения между захватной клешней и стеблем; S — коэффициент безопасности, обычно принимается равным 4; Fb — усилие зажима с обеих сторон захватной клешни, Н; m — масса растения в кассете, г.
После организации получаем:

Уравнения равновесия на основе баланса моментов:

В формуле, lc — расстояние между корпусом параллельного захватывающего цилиндра и центром усилия; F — усилие зажима цилиндра.
Мы выбираем для этой цели модель цилиндра TN20 × 100 s с расстоянием перемещения xm 100 мм. Учитывая, что растения плавно извлекаются из кассеты с начальной скоростью vm, равной 0, и время подъема tm составляет 1 с, подставив данные в уравнение (7), мы вычисляем мгновенное восходящее ускорение am = 0,8 м/с². В случае правильного верхнего рыхления, приводящего к полному отделению блока рассады от кассеты без сопротивления, усилие захвата должно только преодолеть вес растения. Коэффициент трения (f1) между захватной пластиной и растением принимается равным 0,5. Используя уравнение (8), получаем минимальное теоретическое усилие захвата, необходимое для захватной пластины, равное 1,02 Н. В случае неудачного подъема рассады также необходимо учитывать усилие отделения. Предыдущие эксперименты показывают, что усилие отделения составляет 5,22 Н, поэтому усилие захвата захватной пластины Fb должно быть больше 6,24 Н. Согласно разделу 2.1.2, усилие зажима стебля рассады не должно превышать 24,06 Н, поэтому усилие захвата Fb захватной пластины находится в диапазоне от 6,24 Н до 24,06 Н.
Учитывая расположение компонентов, проектирование должно найти тонкий баланс между предотвращением любых помех и обеспечением успешного захвата. Консольная длина захватной пластины, обозначенная как L, составляет 100 мм, а боковой зазор, lc, составляет 15 мм. Применив формулу (10), рассчитывается усилие захвата, оказываемое параллельными пневматическими цилиндрами (F), которое составляет 43 Н при нормальном рабочем давлении 0,5 МПа. Обзор усилия зажима цилиндра по отношению к его длине качания показывает, что для выбранной модели пневматического цилиндра-пальца Jia xin модели MHZ2-16D, который работает в режиме захвата по внутреннему диаметру, усилие зажима достигает 45 Н. Расстояние между закрытыми клешнями, или расстояние между клешнями при минимальном выдвижении, составляет 14,9 мм, а максимальное расстояние между клешнями, или раскрытие клешней, составляет 20,9 мм, при этом рабочий ход охватывает диапазон 6 мм.
Во время процесса пересадки рассады могут возникать отклонения в совмещении стебля растения от центра кассеты, приводящие к изгибу стебля во время извлечения. Чтобы предотвратить повреждение от изгиба, необходимо решить два аспекта: во-первых, оптимизировать структуру концевого эффектора захвата, чтобы избежать повреждения, и, во-вторых, установить соответствующую высоту захвата, чтобы минимизировать травму, связанную с изгибом. Данное исследование анализирует стебель рассады перца, который можно смоделировать как равномерный тонкий стержень с одним закрепленным концом и другим свободным (игнорируя его собственный вес, как показано на Рисунке 10). Основное внимание уделяется определению того, как точно установить высоту захвата на основе механических свойств изгиба стебля, чтобы обеспечить минимальное повреждение во время процесса захвата. Система координат установлена с центром кассеты в качестве начала координат O, осевое направление стебля — как ось x, а радиальное направление — как ось y. Точка P1 представляет закрепленный конец стебля растения на кассете, а точка P2 обозначает позицию захвата. hr — длина изгиба стебля (высота захвата).
Рисунок 10. Схема деформации изгиба стебля.
Под действием усилия зажима стебель находится в нестабильном состоянии, когда приближенное уравнение кривой прогиба

В формуле, y(x) — прогиб стебля; l — длина стебля; δ — горизонтальное перемещение на кончике стебля; x — положение сечения.
Энергия деформации изгиба стебля под усилием зажима следующая:


В этот момент внешняя потенциальная энергия вычисляется путем замены инерционной силы эквивалентной нагрузкой Fc, чья потенциальная энергия
В формуле, dx — диаметр стебля; E — модуль упругости стебля; WP1 — коэффициент поперечного сечения изгиба; I — момент инерции поперечного сечения; y — центробежное расстояние стебля; σP1 — напряжение изгиба поперечного сечения в нижней точке P1.
В случае одинакового напряжения изгиба в точке P1, расстояние между стеблем и смещением осевой линии напрямую связано с высотой захвата рассады, и они показывают положительную взаимосвязь. Чтобы предотвратить повреждение стебля из-за чрезмерной силы изгиба и гарантировать, что минимальная высота захвата hr удовлетворена:

Испытания, проведенные такими учеными, как [24], показали, что рассада из кассет демонстрирует высокое сопротивление изгибу с модулем упругости 34,92 МПа и максимальным напряжением изгиба 2,52 МПа. Используя эту информацию вместе с параметрами испытаний (dx = 3,21 мм, δ = 2,1 мм) и применив вычисления в формуле (18), определяется длина кривизны l, равная 11,9 мм. Из раздела 2.1.1 можно сделать вывод, что по испытаниям на сжатие нижняя часть стебля демонстрирует высокую прочность на сжатие. Когда дело доходит до захвата стебля, позиционирование имеет ключевое значение; идеальная точка будет примерно на 10–20 мм ниже кассеты, обычно выбирая основание стебля, так как места слишком близко к субстрату могут причинить вред, а слишком далекие могут сделать стебель хрупким. Поэтому высота захвата hr установлена на 15 мм, чтобы сбалансировать эти факторы и минимизировать потенциальный ущерб.
3. Управление и пневматические системы
3.1. Проектирование пневматической системы
В механизме извлечения рассады автоматической пересадочной машины пневматические компоненты играют критическую роль. Компоновка пневматической цепи, как показано на Рисунке 11, демонстрирует функциональность каждого цилиндра: цилиндр выталкивания рассады A отвечает за выталкивание растений из кассеты; подъемный цилиндр B поднимает растения; цилиндр скользящего стола C перемещает кассету с рассадой; цилиндр распределения рассады D рассеивает растения над соответствующими посадочными стаканчиками; и цилиндр захвата E зажимает стебли растений. Все цилиндры управляются соленоидными клапанами Zi, обеспечивая движения выдвижения и втягивания. Конкретно, используются двухпозиционные пятиходовые соленоидные клапаны Airtac (Тайбэй, Тайвань) (модель 4V210-08-DC24V) и трехпозиционные пятиходовые соленоидные клапаны (модель 4V220-08-DC24V) благодаря их долговечности и устойчивости к утечке воздуха. Кроме того, для регулирования скоростей выдвижения и втягивания цилиндров каждый оснащен дроссельным клапаном Ki, который регулирует расход воздуха для управления скоростью движения. Учитывая операционные требования извлечения целого ряда рассады одновременно, используются шесть цилиндров захвата E для одновременного зажима и отпускания растений. Учитывая их относительно низкое потребление воздуха во время работы, один соленоидный клапан Z5 используется совместно среди этих цилиндров для управления потоком воздуха, обеспечивая эффективную и синхронизированную работу.
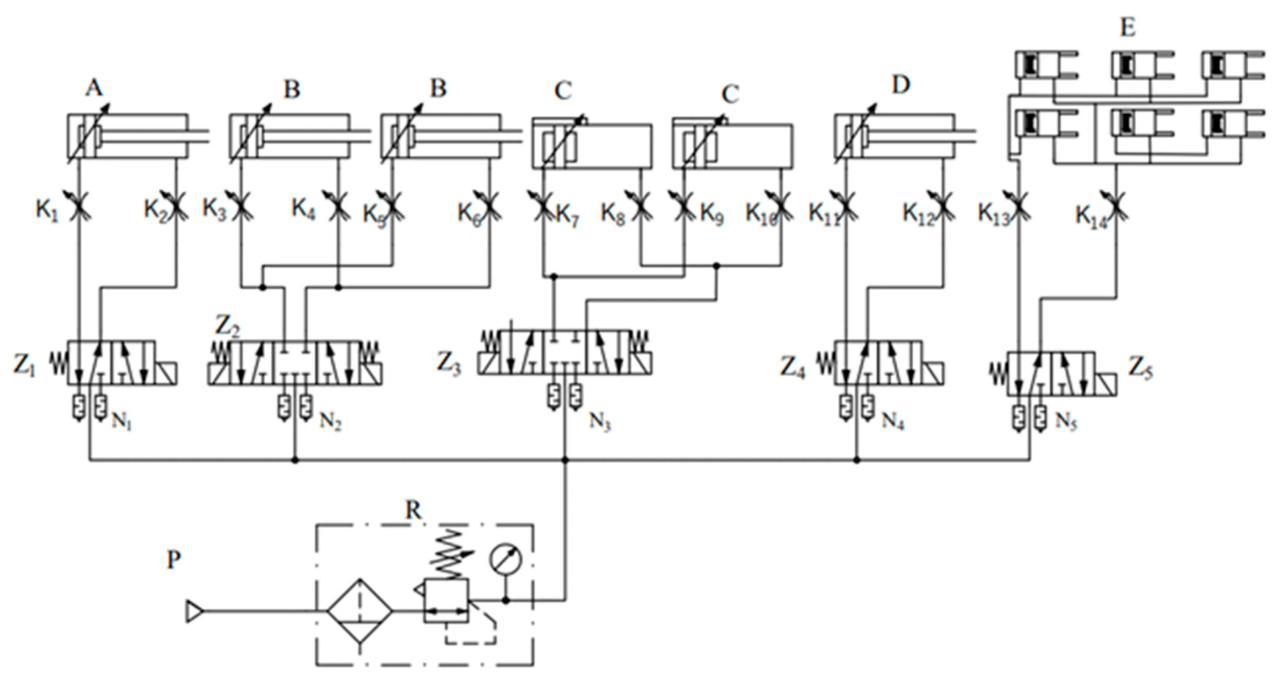
Рисунок 11. Схема пневматической цепи. P — Источник воздуха; R — редуктор; Zi — Управляющий соленоидный клапан; Ki — Дроссельный клапан; Ni — Глушитель; A — Цилиндр выталкивания рассады; B — Подъемный цилиндр; C — Цилиндр скользящего стола; D — Цилиндр распределения рассады; E — Цилиндр захвата.
Расчет расхода воздуха в пневматических системах
Чтобы обеспечить плавную работу пневматической цепи, крайне важно комплексно оценить параметры, указанные для цилиндра, и провести тщательные расчеты для определения точного общего спроса на воздух. Влияние частоты извлечения на это потребление значительно, так как более высокая частота обычно приводит к прогрессивному увеличению спроса. Следовательно, при выборе модели компрессора следует не только сосредоточиться на общем потреблении воздуха, но и тщательно оценить влияние рабочей частоты на производительность системы. Достаточный поток воздуха жизненно важен для эффективного и стабильного функционирования пневматического контура, в конечном итоге повышая общую эффективность системы. Формула для расчета расхода воздуха цилиндра:

В формуле, Q — расход воздуха цилиндра; N — частота движения цилиндра; Dq — диаметр цилиндра; Lq — ход цилиндра; P — рабочее давление пневматической системы.
На основе анализа выше определены модели для цилиндра распределения рассады, подъемного цилиндра и цилиндра захвата. Кроме того, с помощью предварительного экспериментального анализа определено, что необходимое усилие выталкивания составляет не менее 5,22 Н. Цилиндр тонкого профиля SMC (Токио, Япония), модель CDQSB16-30DM, с усилием выталкивания 25,12 Н и ходом 30 мм, выбран в качестве цилиндра выталкивания. Согласно размерам компоновки прототипа, цилиндр перемещения скользящей платформы выбран как механически приводимый безштоковый цилиндр SMC, модель MY1B25G-400, с диаметром цилиндра 25 мм и ходом 400 мм. Основываясь на этих характеристиках, рассчитывается потребление воздуха системой, как показано в Таблице 2.
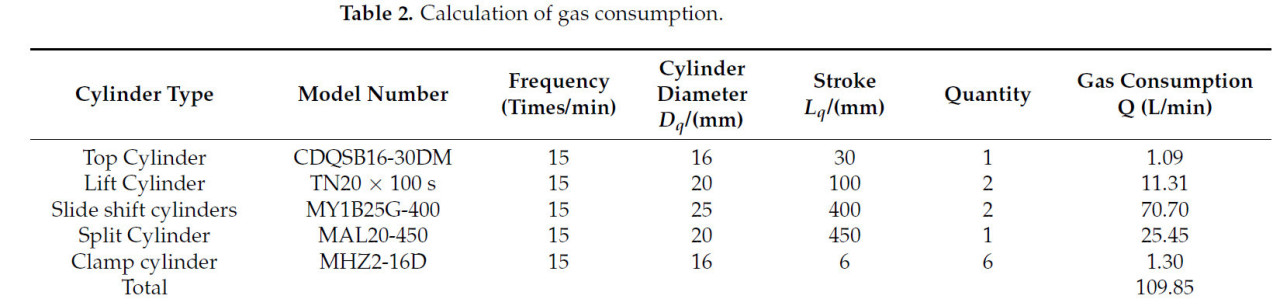
Таблица 2. Расчет расхода газа.
Как видно из Таблицы 2, в случае частоты извлечения рассады 90 растений/мин, потребление воздуха механизмом извлечения рассады автоматической пересадочной машины составляет 109,85 л/мин; чтобы гарантировать, что источник воздуха достаточен и стабилен, мы должны выбрать воздушный компрессор с производительностью 120 л/мин или более в качестве источника выходной мощности воздуха.
3.2. Проектирование системы управления
3.2.1. Программное проектирование
Ядро системы управления заключается в двух основных компонентах: программе позиционирования и программе извлечения и размещения рассады. При запуске системы, как только подается питание, простое нажатие кнопки пуска активирует шаговый двигатель, инициируя задачу конвейера. Двигатель будет продолжать работать, пока не достигнет точно заданной позиции. В этот момент датчик обнаруживает сигнал, запуская контакт ПЛК, чтобы остановить двигатель, таким образом обеспечивая точное позиционирование. Как основной процесс, программа извлечения и размещения гарантирует, что после позиционирования операции извлечения, распределения и размещения рассады выполняются в предопределенной последовательности, обеспечивая плавную работу системы. Блок-схема системы (Рисунок 12) ясно иллюстрирует эту серию точных и упорядоченных шагов.
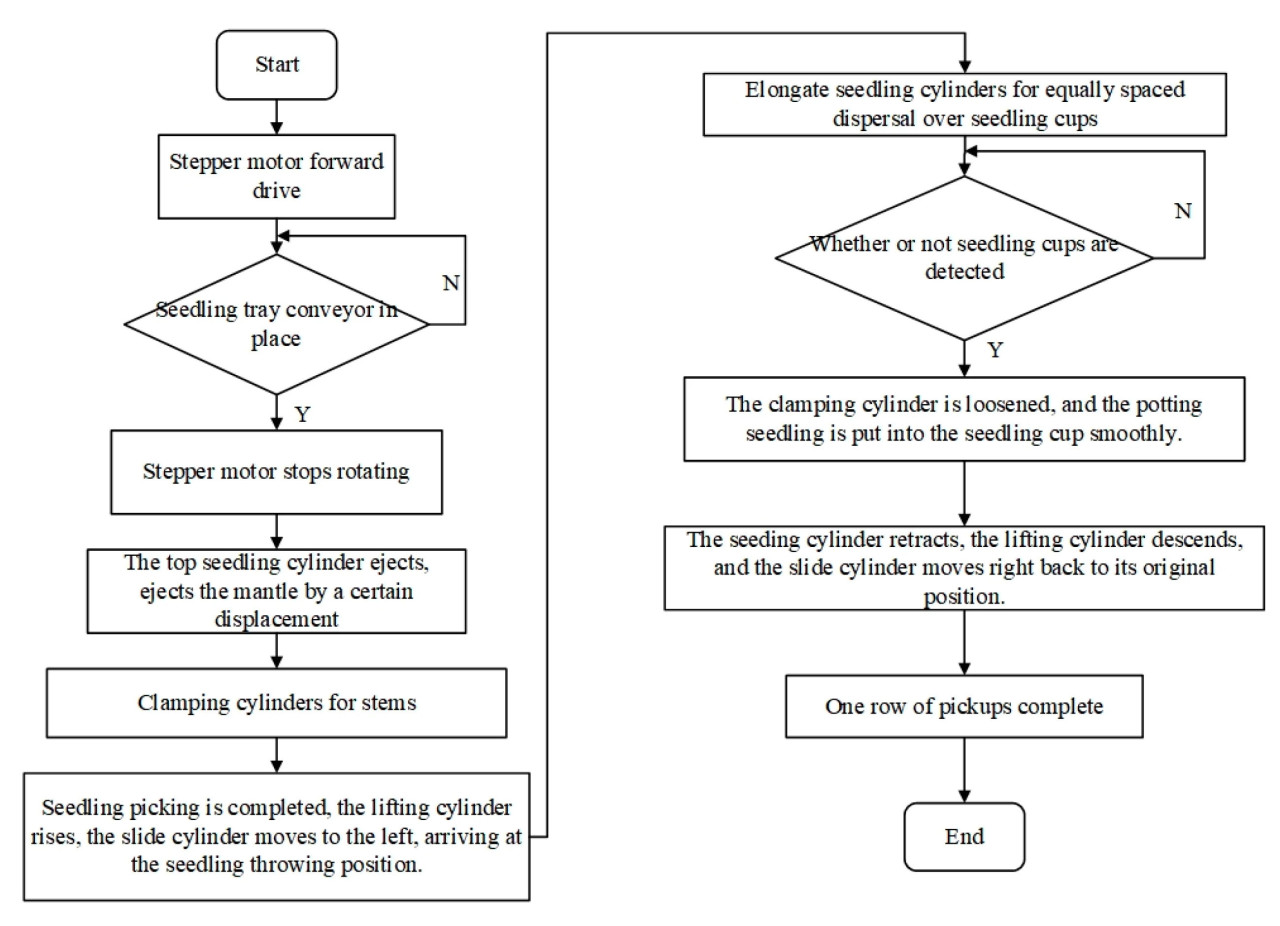
Рисунок 12. Блок-схема системы управления извлечением рассады.
3.2.2. Линии системы управления ПЛК
На основе принципа работы системы извлечения рассады и путем использования сенсорного экрана в качестве контроллера верхнего уровня для управления системой ПЛК, которая, в свою очередь, управляет всем процессом извлечения и размещения рассады, выбранная модель сенсорного экрана — это встраиваемый сенсорный экран TPC7032kt от компании Kunlun Tongtai. Этот сенсорный экран имеет 7-дюймовый ЖК-дисплей и четырехпроводной резистивный сенсорный экран и питается от малоэнергоемкого ЦПУ, образуя интегрированную сенсорную панель. Он оснащен как портами связи RS232, так и RS485 для прямой связи с ПЛК Mitsubishi. Редактируемая модель контроллера — Mitsubishi FX2N-48MT, которая удобна для пользователя, проста в эксплуатации и обладает высокой долговечностью. Входные сигналы поступают от кнопки пуска, кнопки паузы, аварийной кнопки остановки и фотоэлектрических датчиков, в то время как выходные сигналы приводят в действие различные соленоидные клапаны и контроллеры шагового двигателя для выполнения. Система использует вращение двигателя для обработки материалов, в то время как действия извлечения, распределения и размещения рассады выполняются пневматически. Принцип подключения показан на Рисунке 13, где планируется компоновка аппаратного соединения. Поскольку различные компоненты в системе извлечения рассады требуют разных уровней напряжения, система управления использует как источники постоянного тока на 48 В, так и на 24 В. Фактическое подключение следует этой схеме, визуально реализуя общий дизайн, как показано на Рисунке 14.
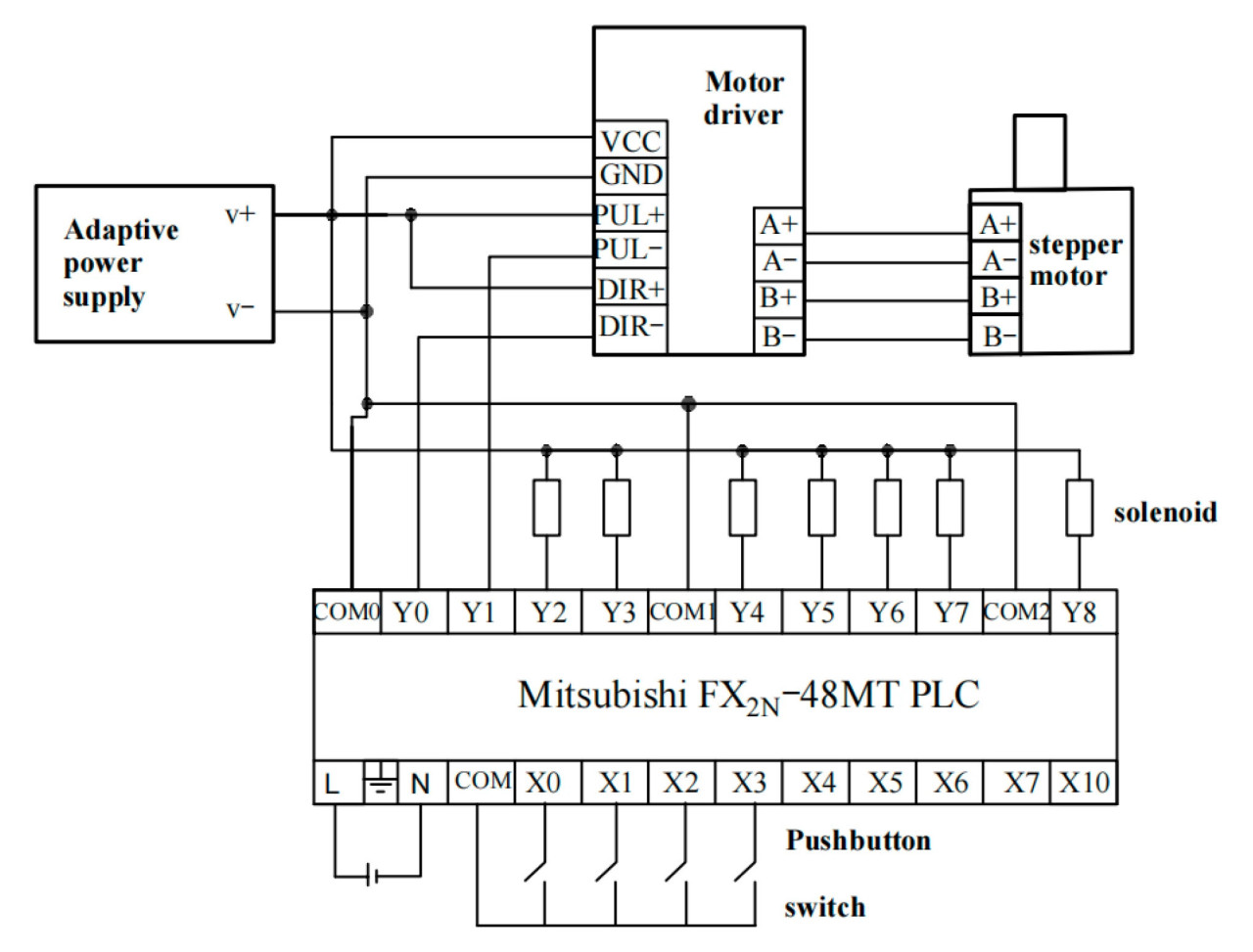
Рисунок 13. Схема цепи управления извлечением и размещением рассады.
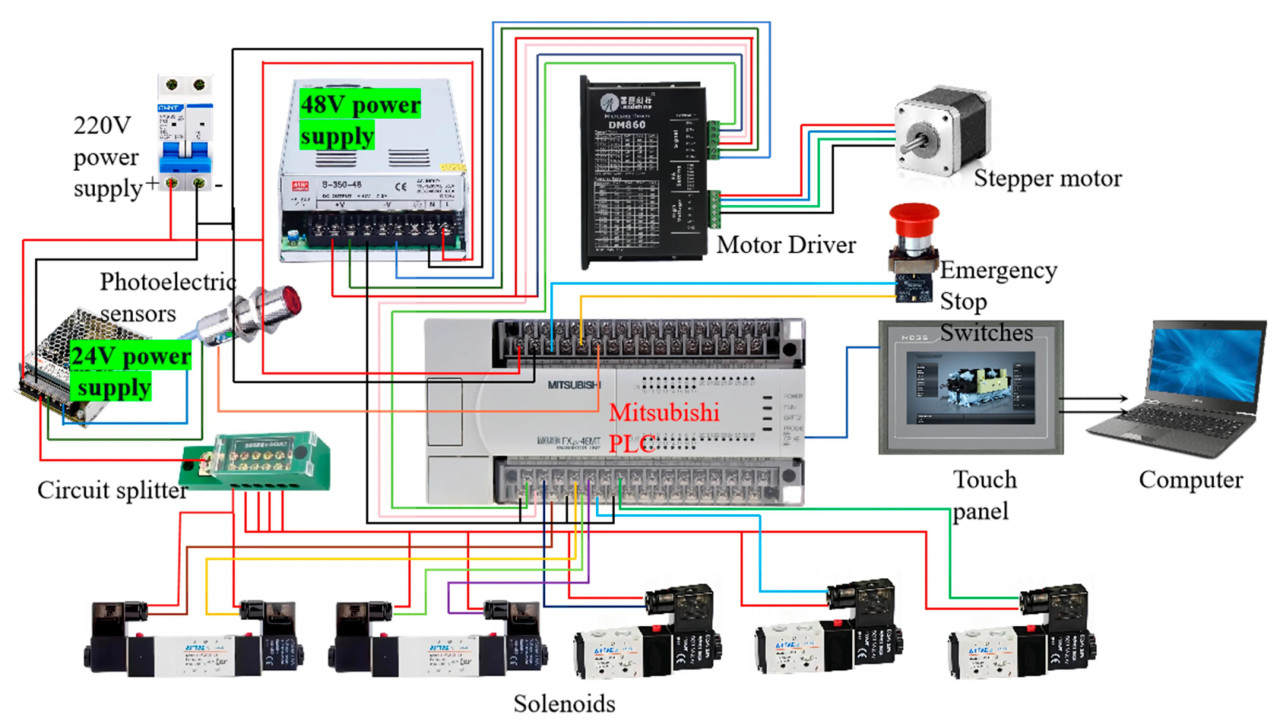
Рисунок 14. Физическая схема подключения.
3.2.3. Проектирование программного обеспечения
Адреса ввода и вывода контроллера ПЛК Mitsubishi назначены, как показано в Таблице 3. После импорта предварительно запрограммированной программы в ПЛК внутренняя система управляет каждым компонентом для последовательной работы. Воздушный компрессор обеспечивает источник энергии для цилиндров, в то время как соленоидные клапаны контролируют приток и отток воздуха, тем самым регулируя движение цилиндров.
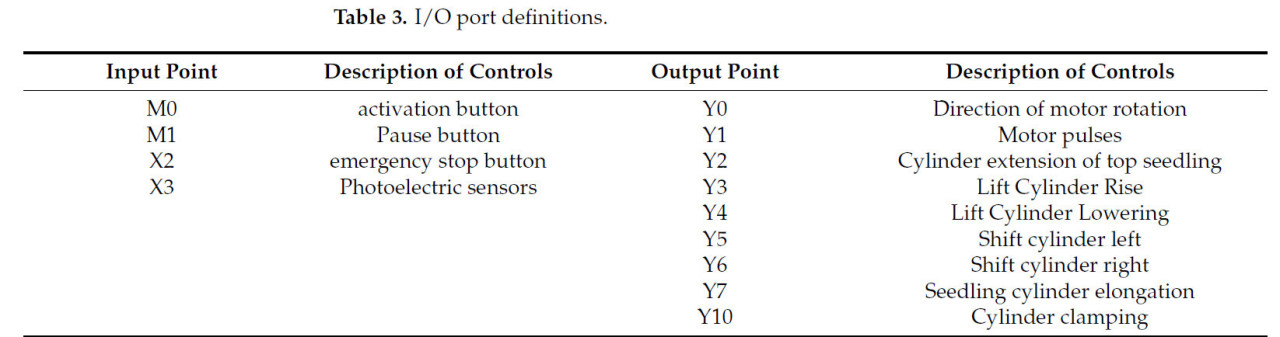
Таблица 3. Определения портов ввода/вывода.
В среде программирования Mitsubishi GX-Works2 была собрана точная управляющая программа, использующая четкую иерархию инструкций последовательного управления и таймеров. Как показано на Рисунке 15, выход Y1 соответствует входному сигналу импульса для шагового двигателя, облегчая его управление и движение в программе. После разработки программы был проведен предварительный запуск теста, который включал выполнение кода без физического подключения каких-либо элементов для проверки плавной функциональности программы. После подтверждения успешного пробного запуска без проблем последовала фаза отладки системы на прототипе машины без нагрузки. Этот шаг был направлен на обеспечение того, чтобы все операционные команды были отзывчивыми и давали ожидаемые результаты. Итерируя через этот процесс, программист тонко настроил программу, чтобы соответствовать предполагаемой управляющей производительности в фактической реализации [25].
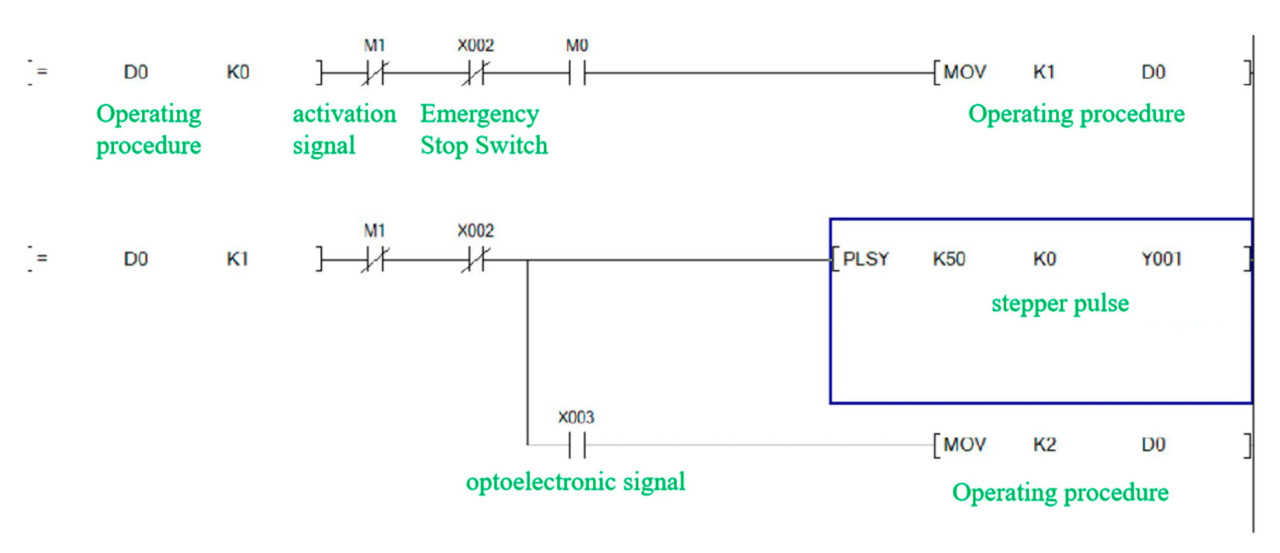
Рисунок 15. Часть программы ПЛК.
4. Эксперимент на испытательном стенде
4.1. Условия испытаний
С 10 по 20 октября 2024 года были проведены испытания производительности для системы пересадки в Ключевой лаборатории машиностроения и автомобильной инженерии, Технологический университет Циндао. Установка прототипа показана на Рисунке 16. Испытуемой рассадой была рассада перца в кассетах, выращенная компанией Shandong S.G Agricultural Co., Ltd в Китае. Почвенный субстрат представлял собой богатую питательными веществами смесь вермикулита, перлита и торфяного мха в соотношении 1:1:2, что обеспечивало оптимальные условия для роста. Рассада проявляла мощные корневые системы и энергичную листву, соответствуя экспериментальным требованиям.
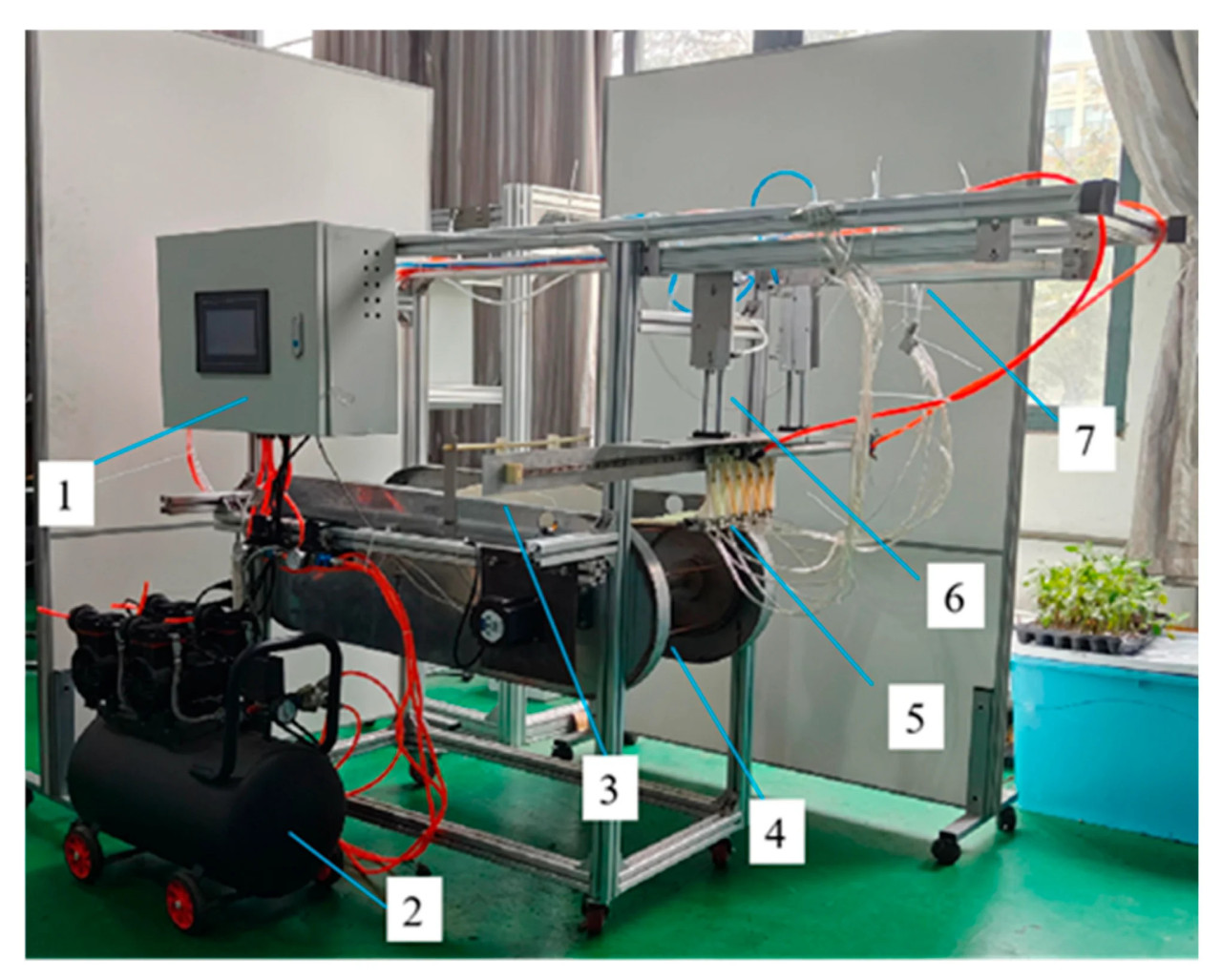
Рисунок 16. Испытательный стенд. 1. Управляющий шкаф; 2. Воздушный компрессор; 3. Механизм прижимной пластины; 4. Механизм транспортировки кассет с рассадой; 5. Механизм распределения рассады; 6. Подъемный механизм; 7. Механизм перемещения.
Испытательное оборудование включало электронные весы Z.H ACS и прецизионный измеритель влажности почвы X.M для точного измерения параметров процесса.
4.2. Экспериментальный план
Возраст рассады является ключевым фактором, определяющим толщину стебля и твердость блока субстрата, напрямую влияя на выживаемость при пересадке и толерантность, и, следовательно, на уровень повреждения. В возрасте 30 дней рассада перца проявляет умеренную прочность блока и относительно низкое перекрытие между стеблями и листьями. В 40 дней корневая система более развита, а стебли и листья становятся плотнее, увеличивая вероятность повреждения рассады. Поэтому для данного исследования была выбрана рассада возрастом 30, 35 и 40 дней. Содержание влаги тесно связано с рыхлостью блока субстрата и влияет на потери субстрата. Правильный контроль влаги обеспечивает плавное извлечение рассады и минимизирует потери субстрата. Когда содержание влаги слишком низкое (<30%), субстрат имеет тенденцию становиться рыхлым и обезвоженным; когда оно слишком высокое (>60%), прочность на сжатие блока снижается, приводя к увеличению повреждения. Следовательно, среднее содержание влаги субстрата было установлено на 30%, 45% и 60%. Частота извлечения рассады должна балансировать подачу кассеты с ритмом извлечения. Как чрезмерно высокая, так и слишком низкая частота могут негативно повлиять на эффективность и успешность. Частота, которая слишком высока, может привести к неудаче извлечения, в то время как слишком низкая частота может снизить эффективность извлечения и не соответствовать требованиям к производительности высокоэффективных пересадочных машин. Поэтому были выбраны частоты извлечения 60, 72 и 84 растения в минуту.
Данное исследование направлено на изучение ключевой роли возраста рассады, контроля влаги и оптимальной частоты извлечения в улучшении эффективности извлечения. Эти три параметра были выбраны в качестве экспериментальных факторов для трехфакторного трехуровневого ортогонального эксперимента с уровнями факторов, как показано в Таблице 4.
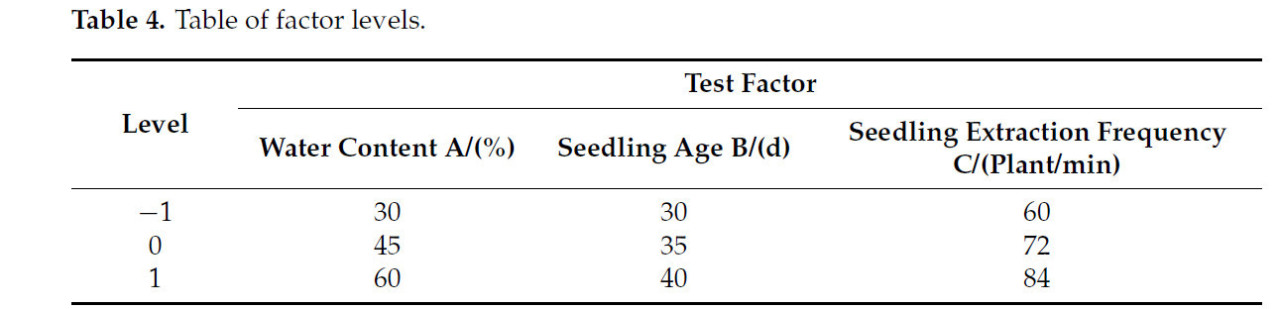
Таблица 4. Таблица уровней факторов.
4.3. Методы испытаний и оценочные показатели
В соответствии с техническими характеристиками, подробно описанными в отраслевом стандарте [JB/T10291—2013 для машин для посадки на засушливых землях], были внесены изменения в систему управления извлечением рассады, адаптированную к различным скоростям извлечения. Воздушный компрессор был отрегулирован на рабочее давление 0,5 МПа, и перед измерениями с помощью влагомера была проведена равномерная поливка рассады. Испытания проводились при заранее определенных уровнях воды 30%, 45% и 60%. Ссылаясь на раздел 3.2.2, тестовая точка была определена на высоте удержания рассады 15 мм. Оценка основывалась на трех критических показателях производительности: успешности извлечения рассады (Y1), скорости потери субстрата (Y2) и скорости повреждения растений в кассетах (Y3). Этот методологический подход обеспечивает согласованность между испытаниями, одновременно исследуя соответствующие эффекты на эффективность машины при каждом указанном условии.
(1) Успешность извлечения рассады Y1: Полное удаление растений из кассет в соответствующие стаканчики для рассады без каких-либо повреждений. Если растения остаются неповрежденными в течение всего процесса, извлечение считается успешным. Математически это может быть представлено следующей формулой:

В формуле, S1 — количество успешно извлеченных растений; S — общее количество растений в кассетах.
(2) Скорость потери субстрата (Y2): В процессе извлечения рассады, как при появлении, так и при захвате, куски субстрата могут разрушаться из-за удара. Скорость потери субстрата оценивается путем сравнения массы субстрата до и после его извлечения из кассеты в стаканчик для рассады. Формула расчета следующая:

В формуле, M0 — масса кассет для рассады; M1 — общая масса рассады в кассетах до испытания; M2 — общая масса рассады в кассетах после извлечения.
(3) Скорость повреждения растений в кассетах (Y3): Во время процесса извлечения рассады листья и стебли растений могут получить некоторый уровень повреждения. Скорость повреждения растений в кассетах рассчитывается путем сравнения количества поврежденных растений с общим количеством неповрежденных растений после извлечения. Формула следующая:

В формуле, S2 — количество растений в кассетах с повреждениями стебля от зажима и листьев.
5. Результаты испытаний и обсуждение
5.1. Анализ поверхности отклика
Используя программное обеспечение Design-Expert 13.0, был разработан трехфакторный трехуровневый ортогональный эксперимент, состоящий из 17 экспериментальных прогонов. Был применен метод поверхности отклика Box–Behnken для определения оптимальной комбинации параметров. Дизайн Box–Behnken представляет собой синтез статистического проектирования и экспериментальных методов; мы использовали дизайн эксперимента Box–Behnken и получили определенные данные через эксперименты. Дизайн Box–Behnken использует многомерное квадратичное уравнение для подгонки функциональной связи между факторами и значениями эффекта и ищет оптимальные параметры процесса через анализ уравнения регрессии, что является статистическим методом для решения многомерных проблем.
Экспериментальный план и результаты для процесса извлечения рассады показаны в Таблице 5. Конкретный процесс извлечения рассады проиллюстрирован на Рисунке 17.
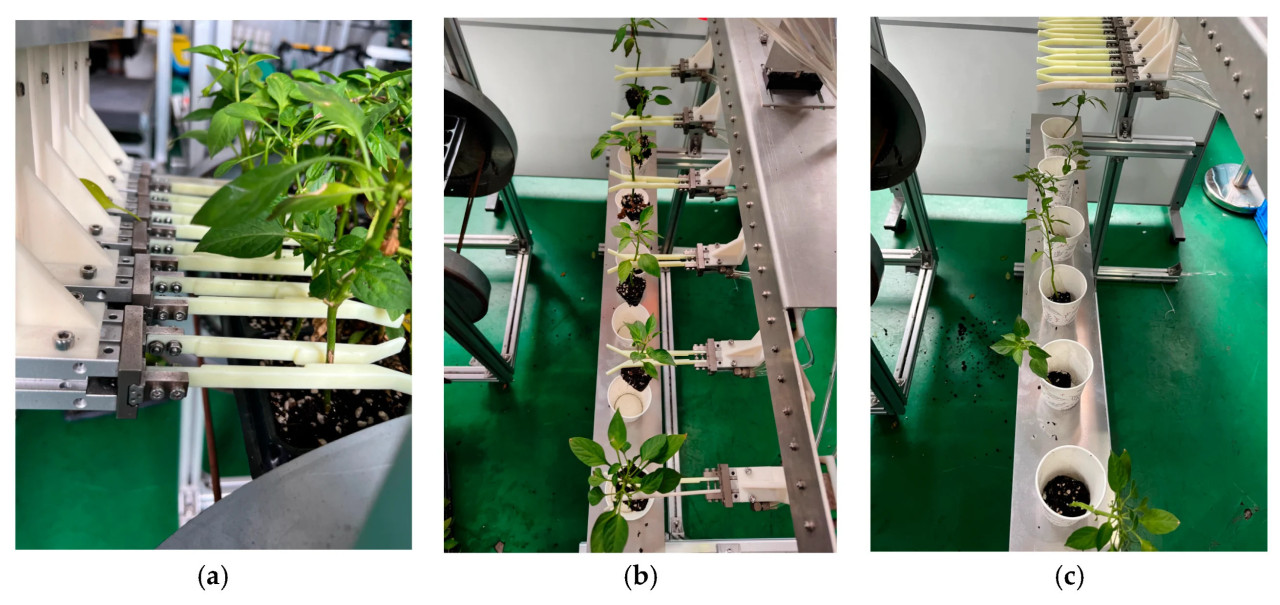
Рисунок 17. Диаграмма процесса подбора и сбрасывания рассады. (a). Процесс захвата рассады; (b). Процесс распределения; (c). Процесс сбрасывания рассады.
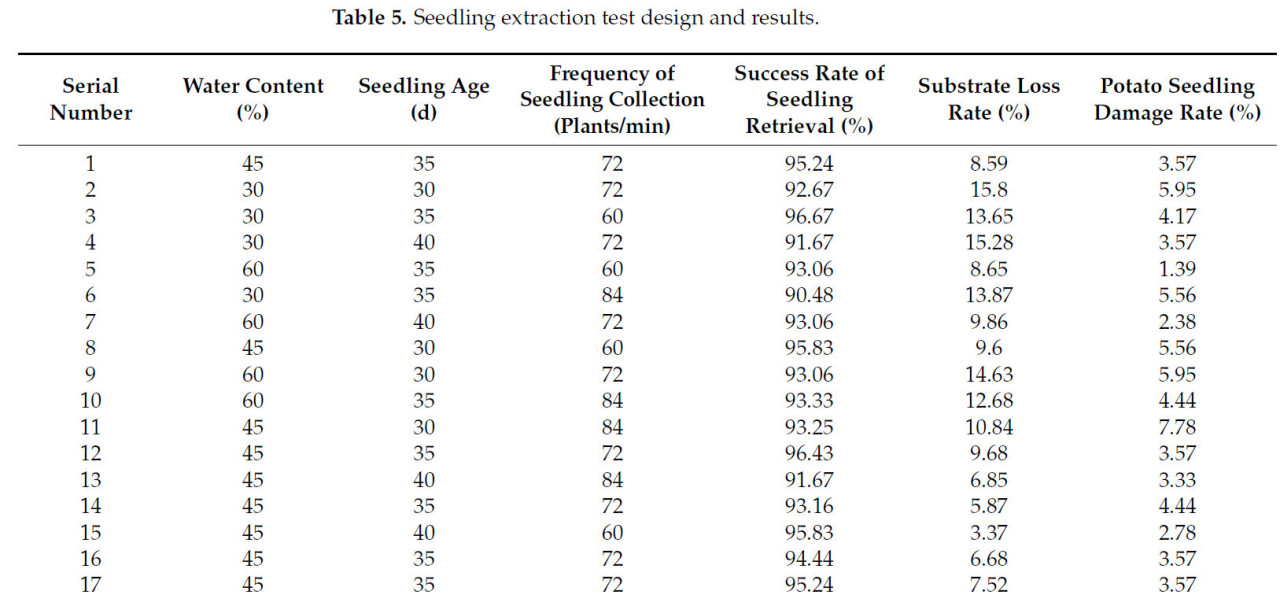
Таблица 5. Дизайн и результаты теста извлечения рассады.
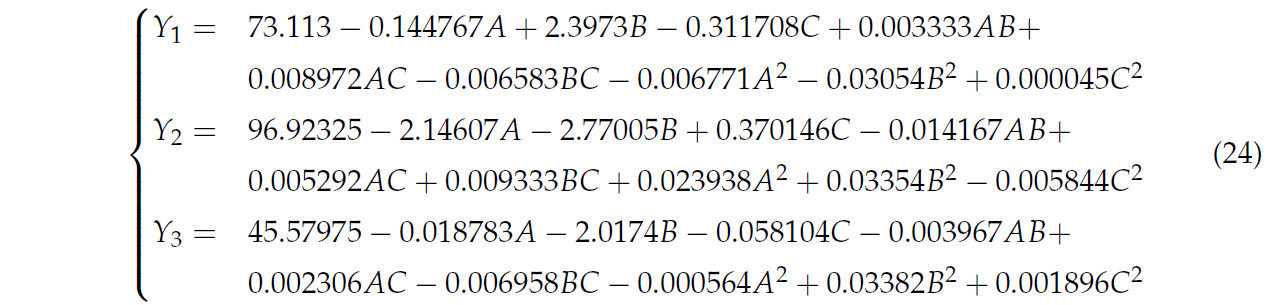
Была получена квадратичная полиномиальная регрессионная модель для каждого оценочного показателя:
Через дисперсионный анализ данных в Таблице 5, как показано в Таблице 6, были проанализированы регрессионные модели для успешности извлечения рассады Y1, скорости потери субстрата Y2 и скорости повреждения рассады Y3. P-значения для всех моделей были менее 0,01, что указывает на значимость моделей. P-значения для членов недостаточности соответствия составили 0,8821, 0,7307 и 0,1429 (все больше 0,05), что указывает на хорошее соответствие трех моделей. Коэффициенты детерминации R² для уравнений подгонки составили 0,8700, 0,9200 и 0,9464 (все больше 0,8), что позволяет предположить, что более 87% значений отклика могут быть объяснены этими тремя моделями. Поэтому эти модели могут быть использованы для прогнозирования рабочих параметров автоматизированного устройства для извлечения рассады.
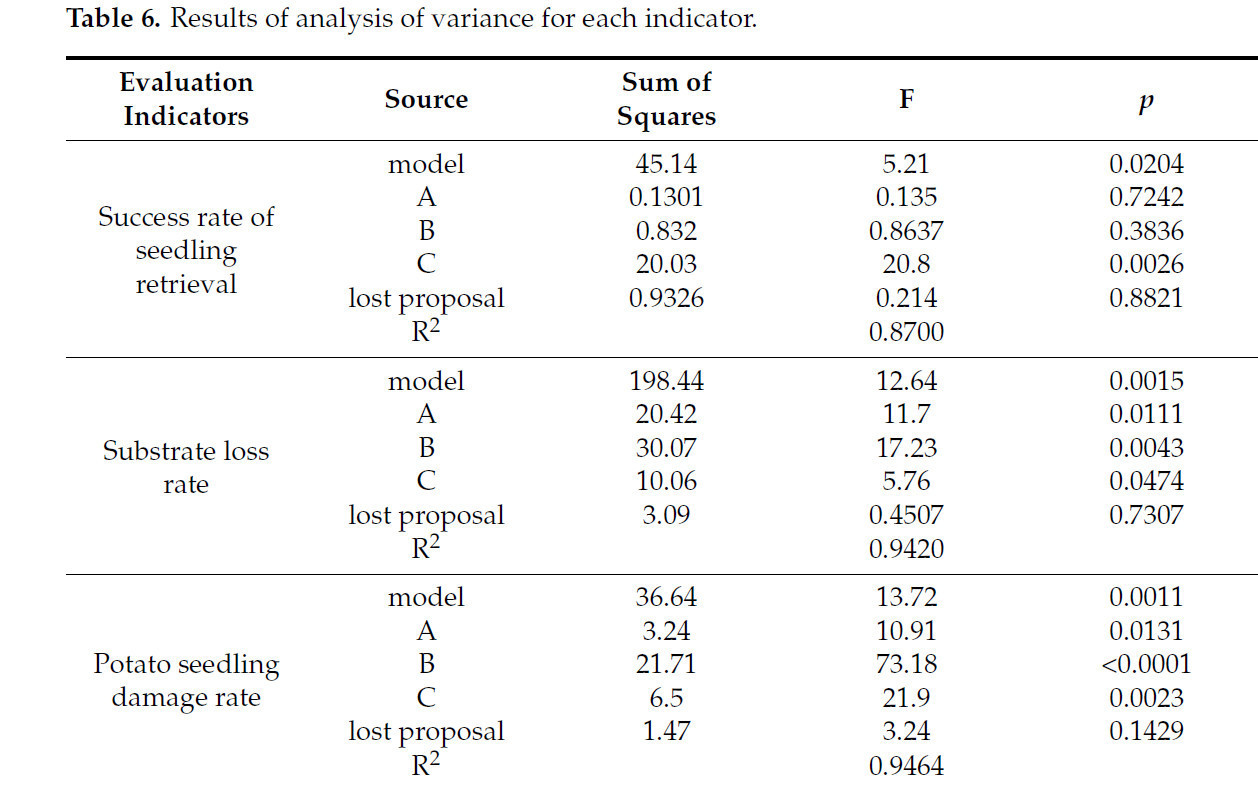
Таблица 6. Результаты дисперсионного анализа для каждого показателя.
Основываясь на результатах эксперимента, исследование углубилось во влияние содержания влаги (A), возраста рассады (B) и частоты извлечения (C) на показатели производительности. Используя программное обеспечение Design-Expert 13.0, были получены математические модели для парных взаимодействующих факторов. Кроме того, 3D графики поверхности отклика успешности извлечения рассады (Y1), скорости потери субстрата (Y2) и скорости повреждения рассады (Y3) были созданы с использованием программного обеспечения Origin 2018.
Как показано на Рисунке 18а, когда частота извлечения составляет 72 растения/мин, успешность извлечения сначала увеличивается, а затем уменьшается с увеличением содержания влаги. С увеличением возраста рассады успешность сначала увеличивается, а затем уменьшается с небольшим колебанием. Когда и содержание влаги, и возраст рассады изменяются, успешность извлечения колеблется от 92% до 94,5% с минимальными вариациями, что указывает на то, что влияние этих двух факторов на успешность незначительно в исследованных пределах. Самый высокий пик происходит при содержании влаги 45% и возрасте рассады 35 дней, с успешностью, достигающей 96,43%. Причиной этого является то, что чрезмерно высокое содержание влаги приводит к избыточной влажности субстрата, делая блок субстрата липким, что вызывает отклонение во время извлечения, снижая прямостоячесть растений. Кроме того, более старая рассада приводит к более развитым ветвям и листьям внутри кассеты, которые могут мешать друг другу, таким образом увеличивая сложность извлечения. Как показано на Рисунке 18b, в возрасте рассады 35 дней, когда частота извлечения составляет 60 растений/мин, успешность извлечения увеличивается, а затем уменьшается с увеличением содержания влаги. Снижение успешности особенно заметно при содержании влаги 30%, и это явление становится более выраженным с увеличением частоты. Напротив, когда содержание влаги повышается до 60%, частота извлечения мало влияет на успешность. Однако общая успешность остается неоптимальной. При самой высокой скорости (высокая частота извлечения) и самом низком содержании влаги (низкое содержание влаги) успешность извлечения находится на самом низком уровне, всего 90,48%. Анализ предполагает, что более высокая частота извлечения вызывает более быстрое движение машины, а низкое содержание влаги делает субстрат рыхлым, приводя к опрокидыванию кассеты во время извлечения и изгибу растений, таким образом увеличивая вероятность неудачи. Как показано на Рисунке 18c, при содержании влаги 45% успешность извлечения увеличивается, а затем уменьшается с ростом возраста рассады с меньшим колебанием. При любом заданном возрасте рассады успешность извлечения обычно уменьшается с увеличением частоты извлечения с большей амплитудой. Это позволяет предположить, что частота извлечения оказывает большее влияние на успешность, чем возраст рассады. В возрасте рассады 35 дней и частоте извлечения 72 растения/мин успешность извлечения достигает максимума 96,43%. Причиной этого является то, что с увеличенной частотой извлечения движение различных компонентов усиливается, и во время процесса захвата рассады растения могут быть подняты до того, как они будут полностью захвачены, что приводит к неудаче.
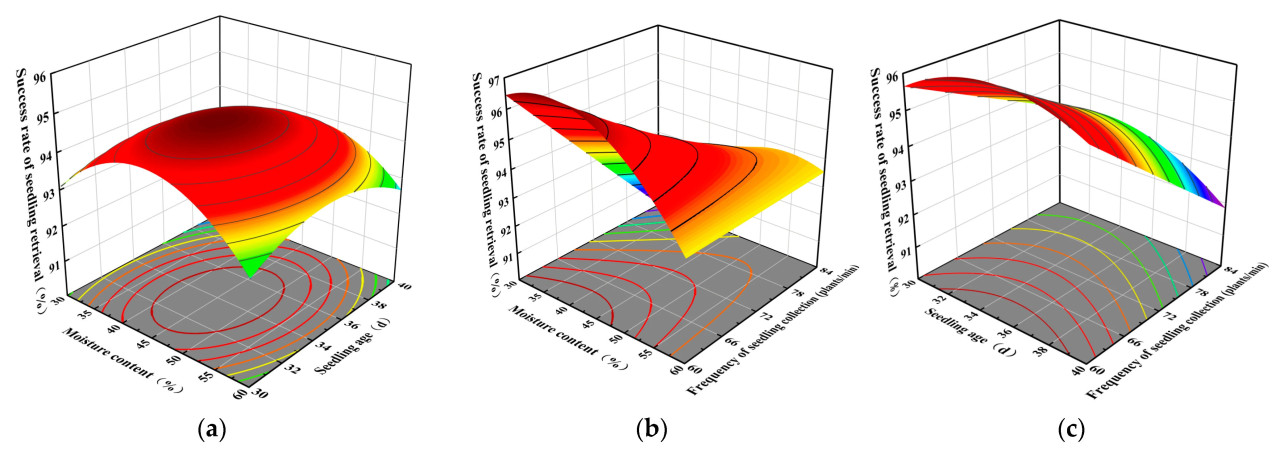
Рисунок 18. Анализ поверхности отклика успешности извлечения рассады. (a) Влияние содержания воды и возраста рассады на успешность извлечения; (b) Влияние содержания воды и частоты извлечения рассады на успешность извлечения; (c) Влияние возраста рассады и частоты извлечения рассады на успешность извлечения.
Как показано на Рисунке 19а, при частоте извлечения 72 растения/мин скорость потери субстрата сначала уменьшается, а затем увеличивается с увеличением содержания влаги при любом заданном возрасте рассады. В возрасте рассады 30 дней изменение скорости потери субстрата более значимо по сравнению с возрастом 40 дней, что указывает на то, что меньший возраст рассады оказывает более выраженное влияние на скорость потери субстрата. При любом заданном уровне содержания влаги скорость потери субстрата уменьшается с увеличением возраста рассады. Однако потеря субстрата выше при низком содержании влаги по сравнению с высоким содержанием влаги. При содержании влаги 45% и возрасте рассады 35 дней скорость потери субстрата находится на самом низком уровне, достигая 5,87%. Причиной этого является то, что с увеличением возраста рассады корневая система становится более развитой, а блок субстрата становится более компактным, уменьшая потерю субстрата в процессе извлечения и захвата. Как показано на Рисунке 19b, в возрасте рассады 35 дней, при любой заданной частоте извлечения, скорость потери субстрата уменьшается, а затем увеличивается с увеличением содержания влаги. При частоте извлечения 60 растений/мин изменение скорости потери субстрата более заметно. Однако с увеличением частоты извлечения амплитуда изменения скорости потери субстрата уменьшается, позволяя предположить, что содержание влаги оказывает большее влияние на скорость потери субстрата, чем частота извлечения. Причина этого в том, что при том же возрасте рассады, когда содержание влаги слишком высокое, блок субстрата размягчается, а когда содержание влаги слишком низкое, блок субстрата становится рыхлым, сухим и трудным для формирования, уменьшая его липкость, что, в свою очередь, влияет на потерю субстрата. При содержании влаги 45% и более низкой частоте извлечения скорость потери субстрата достигает минимума, 5,87%. Как показано на Рисунке 19c, при содержании влаги 45% скорость потери субстрата значительно уменьшается с увеличением возраста рассады и увеличивается с увеличением частоты извлечения. Это указывает на то, что как возраст рассады, так и частота извлечения значительно влияют на скорость потери субстрата. В возрасте рассады 40 дней и частоте извлечения 60 растений/мин скорость потери субстрата минимизирована, достигая 3,37%. Это в основном связано с более развитой корневой системой более старой рассады, что увеличивает компактность блока субстрата. Кроме того, более низкая частота извлечения обеспечивает лучший захват блока рассады, уменьшая потерю субстрата. Напротив, когда частота извлечения увеличивается, вибрация машины усиливается, вызывая разрыхление блока субстрата при более низком содержании влаги. Взаимодействие между этими двумя факторами приводит к более высокой скорости потери субстрата.
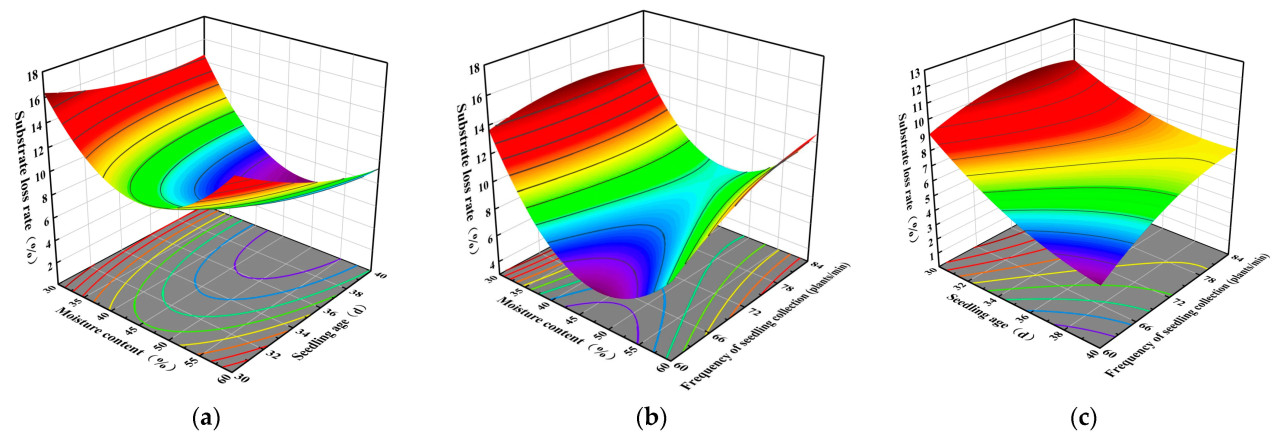
Рисунок 19. Анализ поверхности отклика скорости потери субстрата. (a) Влияние содержания воды и возраста рассады на скорость потери субстрата; (b) Влияние содержания воды и частоты извлечения рассады на скорость потери субстрата; (c) Влияние возраста рассады и частоты извлечения рассады на скорость потери субстрата.
Как показано на Рисунке 20а, при частоте извлечения 72 растения/мин скорость повреждения рассады уменьшается с увеличением возраста рассады при любом заданном уровне содержания влаги, со значительным изменением амплитуды. Когда возраст рассады минимален, скорость повреждения показывает минимальную реакцию на различные содержания влаги и находится на более высокой стадии повреждения. Однако при более старом возрасте рассады скорость повреждения уменьшается с увеличением содержания влаги, хотя тенденция более постепенная, что указывает на то, что возраст рассады оказывает более значительное влияние на скорость повреждения рассады, чем содержание влаги. В возрасте рассады 40 дней и содержании влаги 60% скорость повреждения рассады минимизирована до 2,38%. Это связано с тем, что у более старой рассады стебли толще и прямее, что облегчает захват стебля во время извлечения, таким образом уменьшая повреждение. Как показано на Рисунке 20b, в возрасте рассады 35 дней, когда частота извлечения низкая, скорость повреждения рассады уменьшается с увеличением содержания влаги с большим изменением амплитуды. Когда частота извлечения превышает 72 растения/мин, скорость повреждения рассады не показывает значительного изменения с изменением содержания влаги. При низком содержании влаги скорость повреждения рассады не показывает значительного изменения с изменением частоты извлечения, но при более высоком содержании влаги скорость повреждения увеличивается с увеличением частоты извлечения. При содержании влаги 60% и частоте извлечения 60 растений/мин скорость повреждения рассады достигает самой низкой точки 1,39%. Это связано с взаимодействием между содержанием влаги и частотой извлечения, что приводит к минимальной скорости повреждения рассады. Как показано на Рисунке 20c, при содержания влаги 45%, скорость повреждения рассады уменьшается с увеличением возраста рассады при любой заданной частоте извлечения. Однако при более высоких частотах извлечения амплитуда изменения скорости повреждения более заметна по сравнению с более низкими частотами извлечения. В возрасте рассады 30 дней скорость повреждения рассады значительно увеличивается с увеличением частоты извлечения, в то время как в возрасте 40 дней скорость повреждения увеличивается медленно с более высокой частотой извлечения. В возрасте рассады 30 дней и частоте извлечения 84 растения/мин скорость повреждения рассады самая высокая, 7,78%. Это связано с тем, что стебли более молодой рассады более хрупкие и склонны к изгибу, и с более высокой частотой извлечения скорость машины увеличивается. Во время процесса захвата нисходящее движение концевого эффектора может привести к поломке стебля растения, приводя к увеличению скорости повреждения рассады.
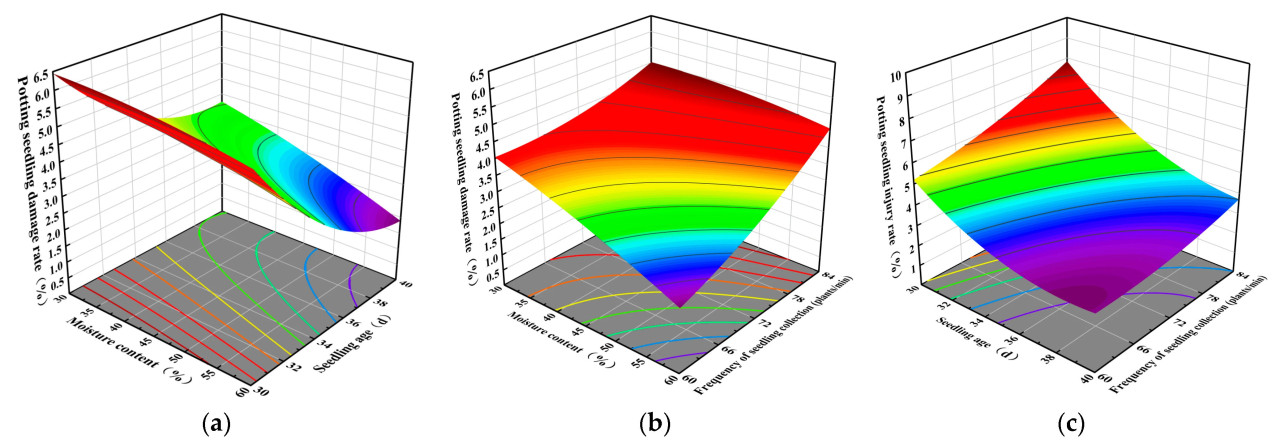
Рисунок 20. Анализ поверхности отклика скорости повреждения растений в кассетах. (a) Влияние содержания воды и возраста рассады на скорость повреждения растений в кассетах; (b) Влияние содержания воды и частоты извлечения на скорость повреждения растений в кассетах; (c) Влияние возраста рассады и частоты извлечения на скорость повреждения растений в кассетах.
5.2. Оптимизация и проверка параметров извлечения рассады
Согласно результатам ортогонального теста, содержание влаги, возраст рассады и частота извлечения рассады оказывают большее влияние на эффект извлечения; для получения наивысшей успешности извлечения рассады Y1, наименьшей скорости потери субстрата Y2 и наименьшей скорости повреждения растений в кассетах Y3 используются в качестве оценочных показателей, с установлением следующих математических моделей:
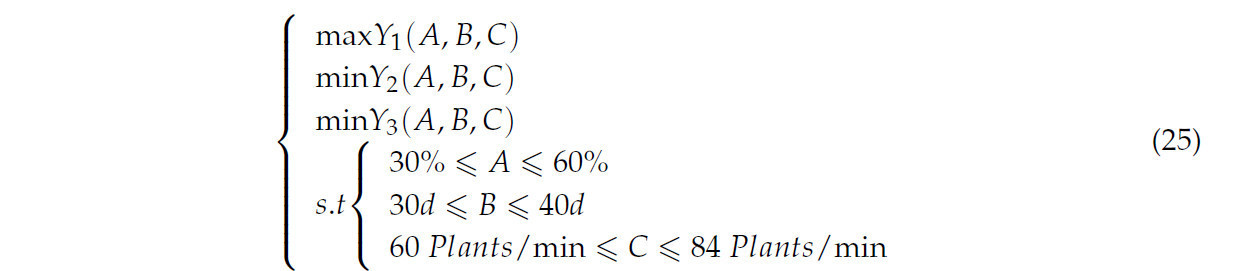
Оптимизация параметров была выполнена с использованием программного обеспечения Design-Expert 13.0, давая следующую оптимальную комбинацию: содержание влаги субстрата 47,80%, возраст рассады 38,32 дня и частота пересадки 60 растений/мин. При этих условиях соответствующая успешность пересадки составила 95,90%, скорость потери субстрата 3,99% и скорость повреждения рассады 2,44%. Учитывая сложность точной регулировки содержания влаги субстрата кассет до теоретических значений в практических испытаниях, параметры, близкие к теоретическим значениям, были выбраны для проверочного эксперимента. Выбранная комбинация параметров для проверки: содержание влаги субстрата 48%, возраст рассады 38 дней и частота пересадки 60 растений/мин.
В проверочном эксперименте те же 72-ячеечные кассеты с рассадой перца, использованные в исследовании, были протестированы на идентичной экспериментальной установке. Чтобы обеспечить точность, условия окружающей среды поддерживались согласованными с теми, что были в начальной экспериментальной фазе. Проверочные испытания повторялись три раза, данные записывались после каждого испытания и рассчитывались средние значения. Окончательные результаты показали успешность пересадки 94,44%, скорость потери субстрата 6,07% и скорость повреждения рассады 4,17%. Фактические результаты показали минимальное отклонение от оптимизированных прогнозов, демонстрируя стабильную производительность устройства и подтверждая, что оптимизированные рабочие параметры надежны и применимы для практического использования.
Автоматическое устройство для извлечения рассады, разработанное в данном исследовании, которое сочетает метод верхнего рыхления и захвата стебля, достигает успешности извлечения рассады 94,44%, скорости потери субстрата 6,07% и скорости повреждения рассады 4,17%. По сравнению с традиционными устройствами для извлечения рассады, оно демонстрирует стабильную производительность, более высокую рабочую эффективность и значительно улучшенную успешность извлечения рассады (94,44%). По сравнению с устройствами извлечения захватного типа (где типичные скорости повреждения рассады обычно находятся в диапазоне 5–10%), наш метод устраняет повреждение, вызванное прочностью стебля, с контролем скорости повреждения рассады на уровне 4,17%. По сравнению с устройствами извлечения с верхним выталкиванием, наш метод значительно снижает влияние прочности блока и адгезии между кассетой и блоком, приводя к снижению скорости потери субстрата до 6,07%, тем самым снижая производственные затраты.
6. Выводы
В данном исследовании представлен полностью автоматизированный сквозной механизм извлечения рассады на основе механических принципов и пневматического управления. Система состоит из рамы, устройства для транспортировки кассет с рассадой, устройства для извлечения рассады, пневматической системы и системы управления, среди других. Ключевые рабочие компоненты были оптимизированы для обеспечения автоматических операций, таких как подача, извлечение, захват и распределение рассады. Конструкция проста и легко управляема.
Используя 72-ячеечную кассету для рассады перца в качестве объекта исследования, были проведены испытания механических характеристик стеблей рассады. На основе результатов была установлена модель усилия в процессе захвата, что привело к оптимизации механизма захвата. Кроме того, была разработана кинематическая модель механизма распределения рассады для оптимизации проектирования его ключевых параметров. Электрические и пневматические цепи автоматической системы извлечения рассады были спроектированы на основе контроллера ПЛК, чтобы обеспечить плавную работу системы и соответствовать проектным требованиям.
Был проведен трехфакторный трехуровневый ортогональный эксперимент с возрастом рассады, содержанием влаги и частотой извлечения в качестве экспериментальных факторов и успешностью извлечения рассады, скоростью потери субстрата и скоростью повреждения рассады в качестве оценочных показателей. Дисперсионный анализ и анализ поверхности отклика использовались для определения влияния ключевых факторов на эти показатели. Используя программное обеспечение Design-expert 13.0, были решены параметры оптимизации, получив оптимальные условия для наивысшей успешности извлечения рассады, наименьшей скорости потери субстрата и минимальной скорости повреждения рассады, когда содержание влаги рассады составляет 48%, возраст рассады 38 дней и частота извлечения 60 растений/мин. Проверочный тест с использованием тех же параметров подтвердил, что при оптимальной комбинации параметров успешность извлечения рассады составила 94,44%, скорость потери субстрата 6,07% и скорость повреждения рассады 4,17%, все из которых соответствуют проектным требованиям.
В отличие от традиционной сельскохозяйственной техники, данное исследование интегрирует машинно-электро-пневматическую автоматизацию, сочетая передовые технологии, такие как позиционирование датчиков и программируемое управление. Система включает многочисленные движущиеся части, что требует высокой точности установки и совместимости. Во время тестирования наблюдались такие проблемы, как недостаточная герметичность между некоторыми компонентами и вибрация машины. Будущие улучшения будут сосредоточены на оптимизации общих структурных размеров и уменьшении количества пневматических компонентов для предотвращения утечки воздуха. Программа будет продолжать обновляться и оптимизироваться для упрощения процесса движения, увеличения частоты извлечения рассады и достижения точного и быстрого размещения растений. Система будет постепенно развиваться в сторону интеллектуализации и визуализации.
Ссылки
1. Liu, W.; Tian, S.J.; Wang, Q.Y.; Jiang, H.Y. Key Technologies of Plug Tray Seedling Transplanters in Protected Agriculture: A Review. J. Agric. 2023, 13, 1488. [Google Scholar] [CrossRef]
2. Cheng, B.; Wu, H.; Zhu, H.; Liang, J.; Miao, Y.; Cui, Y.; Song, W. Current Status and Analysis of Key Technologies in Automatic Transplanters for Vegetables in China. Agriculture 2024, 14, 2168. [Google Scholar] [CrossRef]
3. Liao, Q.X.; Zhang, Z.; Hu, Q.L. Design and trajectory analysis of pneumatic picking-up mechanism for rape paper pot seedling. Trans. Chin. Soc. Agric. Mach. 2017, 48, 70–78. [Google Scholar]
4. Ye, B.; Zeng, G.J.; Deng, B.; Yang, C.L.; Liu, J.K.; Yu, G.H. Design and tests of a rotary plug seedling pick-up mechanism for vegetable automatic transplanter. J. Int. J. Agric. Biol. Eng. 2020, 13, 70–78. [Google Scholar] [CrossRef]
5. Sharma, A.; Khar, S. Current developments in vegetable transplanters in developing countries: A comprehensive review. Int. J. Veg. Sci. 2022, 28, 417–440. [Google Scholar] [CrossRef]
6. Jin, X.; Zhang, B.; Suo, H.; Lin, C.; Ji, J.; Xie, X. Design and Mechanical Analysis of a Cam-Linked Planetary Gear System Seedling Picking Mechanism. Agriculture 2023, 13, 810. [Google Scholar] [CrossRef]
7. Li, P.; Yun, Z.; Gao, K.; Si, L.; Du, X. Design and Test of a Force Feedback Seedling Pick-Up Gripper for an Automatic Transplanter. Agriculture 2022, 12, 1889. [Google Scholar] [CrossRef]
8. Abhijit, K.; Mathur, S.M.; Gaikwad, B.B. Automation in Transplanting: A Smart Way of Vegetable Cultivation. J. Curr. Sci. 2018, 115, 1884–1892. [Google Scholar] [CrossRef]
9. Islam, M.N.; Iqbal, M.Z.; Chowdhury, M.; Ali, M.; Shafik, K.; Kabir, M.S.N.; Lee, D.-H.; Chung, S.-O. Stress and Fatigue Analysis of Picking Device Gears for a 2.6 kW Automatic Pepper Transplanter. Appl. Sci. 2021, 11, 2241. [Google Scholar] [CrossRef]
10. Ma, G.X.; Chen, X.; Liu, Y.; Han, L.H.; Mao, H.P.; Hu, J.P. Airflow ejection-wrapped clamping type seedling picking method and parameter optimization. J. Front. Plant Sci. 2023, 13, 1084563. [Google Scholar] [CrossRef]
11. Jiang, L.; Zhu, T.W.; Tang, Q.; Wu, J.; Jiang, D.; Huang, M.H. Mechanical Characteristics Testing and Parameter Optimization of Rapeseed Blanket Seedling Conveying for Transplanters. Agriculture 2024, 14, 699. [Google Scholar] [CrossRef]
12. Islam, M.N.; Iqbal, M.Z.; Ali, M.; Chowdhury, M.; Kabir, M.S.N.; Park, T.; Kim, Y.-J.; Chung, S.-O. Kinematic Analysis of a Clamp-Type Picking Device for an Automatic Pepper Transplanter. Agriculture 2020, 10, 627. [Google Scholar] [CrossRef]
13. Yang, Q.Z.; Xu, L.; Shi, X.Y.; Ibrar, A.; Mao, H.P.; Hu, J.P.; Han, L.H. Design of seedlings separation device with reciprocating movement seedling cups and its controlling system of the full-automatic plug seedling transplanter. J. Comput. Electon. Agric. 2018, 147, 131–145. [Google Scholar] [CrossRef]
14. Yue, R.; Hu, J.P.; Liu, Y.J.; Yao, M.J.; Zhang, T.F.; Shi, J.W. Design and Working Parameter Optimization of Pneumatic Reciprocating Seedling-Picking Device of Automatic Transplanter. Agriculture 2022, 12, 1989. [Google Scholar] [CrossRef]
15. Jin, X.; Zhao, K.X.; Ji, J.T.; Ma, H.; Pang, J.; Qiu, Z.M. Design and experiment of automatic transplanting device for potted tomato seedlings. J. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 233, 1045–1054. [Google Scholar] [CrossRef]
16. Khadatkar, A.; Magar, A.P.; Sawant, C.P.; Modi, R.U. Development and testing of automatic seedling extractor in robotic transplanter using mechatronics for nursery seedlings. Discov. Appl. Sci. 2024, 6, 51. [Google Scholar] [CrossRef]
17. Liu, Z.C.; Shi, L.; Liu, Z.Y.; Xing, J.F.; Hu, C.; Wang, X.F.; Wang, L. Design and Testing of a Seedling Pick-Up Device for a Facility Tomato Automatic Transplanting Machine. Sensors 2024, 24, 6700. [Google Scholar] [CrossRef]
18. Zhou, M.L.; Sun, H.; Xu, X.; Yang, J.J.; Wang, G.B.; Wei, Z.X.; Xu, T.B.; Yin, J.J. Study on the Method and Mechanism of Seedling Picking for Pepper (Capsicum annuum L.) Plug Seedlings. Agriculture 2024, 14, 11. [Google Scholar] [CrossRef]
19. Rahul, K.; Raheman, H.; Paradkar, V. Design and development of a 5R 2DOF parallel robot arm for handling paper pot seedlings in a vegetable transplanter. J. Comput. Electron. Agric. 2019, 166, 105014. [Google Scholar] [CrossRef]
20. Zhou, B.; Miao, H.; Guan, C.S.; Ji, X.; Wang, X.C. Design and Test of Seedling-Picking Mechanism of Fully Automatic Transplanting Machine. Appl. Sci. 2024, 14, 9235. [Google Scholar] [CrossRef]
21. Hu, S.Y.; Hu, M.J.; Yan, W.; Zhang, W.Y. Design and Experiment of an Integrated Automatic Transplanting Mechanism for Picking and Planting Pepper Hole Tray Seedlings. Agriculture 2022, 12, 557. [Google Scholar] [CrossRef]
22. Wang, X.; Liu, M.Z.; Zhai, C.Y.; Han, C.J.; Yang, S.; Gao, Y.Y. Design and test of a stem clamping type seedling extraction device for vegetable transplanting. J. Trans. Chin. Soc. Agric. Mach. 2023, 54, 122–132. [Google Scholar]
23. Zhang, N. Design and Test of Key Components of Automatic Transplanting Machine for Pepper Hole Tray Seedlings; Huazhong Agricultural University: Wuhan, China, 2023. [Google Scholar]
24. Hu, S.Y.; Hu, M.J.; Zhang, W.Y.; Jiang, Z. Experimental and simulation studies on the mechanical characteristics of stem of chili pepper hole tray seedlings. J. J. Chin. Agric. Mech. 2022, 43, 9–18. [Google Scholar]
25. Li, M.Y.; Xiao, L.Q.; Ma, X.Q.; Yang, F.; Jin, X.; Ji, J.T. Vision-Based a Seedling Selective Planting Control System for Vegetable Transplanter. Agriculture 2022, 12, 2064. [Google Scholar] [CrossRef]
Peng Z, Yang F, Li Y, Li X, Li B, Xu G. Design and Testing of a Whole-Row Top-Loosening Stem-Clamping Seedling Extraction Device for Hole Tray Seedlings. Agriculture. 2025; 15(2):165. https://doi.org/10.3390/agriculture15020165
Перевод статьи «Design and Testing of a Whole-Row Top-Loosening Stem-Clamping Seedling Extraction Device for Hole Tray Seedlings» авторов Peng Z, Yang F, Li Y, Li X, Li B, Xu G., оригинал доступен по ссылке. Лицензия: CC BY. Изменения: переведено на русский язык

















































































































Комментарии (0)