Применение метода дискретных элементов в картофелеуборочной технике: обзор
Метод дискретных элементов (МДЭ) является инновационным численным подходом. Данный метод используется для изучения и решения задач, связанных с закономерностями движения частиц в дискретных системах, характеристиками контактной механики, механизмами процессов сепарации, а также взаимосвязями между контактными усилиями и энергией. Сельскохозяйственная техника включает в себя взаимодействие машин с почвой, сельскохозяйственными культурами и другими системами. Проектирование сельхозмашин можно приравнять к решению задач в дискретных системах. МДЭ нашел широкое применение в исследованиях, посвященных проектированию сельскохозяйственной техники и механизированной уборке урожая.
Аннотация
Он также предоставил важный теоретический инструмент для проектирования и выбора рабочих параметров, а также для оптимизации конструкции картофелеуборочных машин. В данном обзоре сначала анализируется и обобщается текущая ситуация в мировом картофелеводстве, масштабы выращивания и урожайность. Далее рассматриваются проблемы, стоящие перед развитием картофельной отрасли. Результаты показывают, что селекция является ключом к улучшению сортов картофеля, уборка — основным этапом, на котором происходит повреждение клубней, а переработка — главным процессом, связанным с отходами картофеля. Во-вторых, представлен обзор базовых принципов МДЭ, контактных моделей и механических параметров, а также описан процесс моделирования с использованием программного обеспечения EDEM. В-третьих, рассматривается применение МДЭ для моделирования процессов механизированного выкапывания, транспортировки, сбора и сепарации картофеля от почвы. Установлено, что точность построения моделей частиц картофеля и почвы, а также обоснованность выбора контактной модели являются основными факторами, влияющими на достоверность результатов дискретно-элементного моделирования. В заключение представлены проблемы использования МДЭ для исследований картофелеуборочной техники, а также подведены итоги и даны перспективы дальнейшего развития метода.
1. Введение
Картофель является четвертой по значимости сельскохозяйственной культурой в мире [1] и одним из наиболее потребляемых продуктов питания в глобальном масштабе [2]. Его выращивают более чем в 100 странах и регионах [3], и он играет важнейшую роль в обеспечении глобальной продовольственной безопасности и экономического развития [4,5,6]. Согласно данным, опубликованным Продовольственной и сельскохозяйственной организацией ООН (ФАО), глобальные районы возделывания картофеля разделены на шесть основных сред выращивания, как показано на рисунке 1 [7], по две в условиях умеренного, субтропического и тропического климата [8,9]. Мировое производство картофеля достигло 368,8 млн тонн в 2019 году, 371,1 млн тонн в 2020 году и 376,1 млн тонн в 2021 году. Ожидается, что ежегодное производство будет увеличиваться с ростом населения планеты. Обеспечение эффективного и стабильного развития картофельной отрасли стало ключевой проблемой в области сельского хозяйства [10]. В настоящее время уровень механизированной уборки картофеля невысок, а картофелеуборочные комбайны сталкиваются с такими проблемами, как высокий уровень механических повреждений [11], низкая эффективность работы, высокие эксплуатационные расходы и потери почвы в поле во время механизированной уборки [7]. В результате, в настоящее время не существует картофелеуборочного комбайна, который мог бы функционировать во всех рабочих условиях, на всех типах почв и для всех сортов картофеля. Исследования и разработка картофелеуборочных комбайнов в значительной степени зависят от механической рабочей среды [12]. Существуют различные способы уборки картофеля, такие как традиционный ручной метод [13], метод с использованием животной тяги [14] и комбайновая уборка [15]. Из-за трудоемкости ручной уборки картофеля и развития сельскохозяйственных технологий существует настоятельная необходимость перехода от преимущественно ручных методов к механизированным способам уборки; однако биомеханические свойства картофеля затрудняют достижение полной механизации всего процесса [16]. Будучи одной из основных клубнеплодных культур и важным источником крахмала [17], картофель подвержен механическим повреждениям в процессе механизированной уборки, что может привести к гниению, в результате чего каждый год в процессе уборки теряется значительное количество картофеля [18,19]. Кроме того, прорастание во время хранения также способствует потерям картофеля [20]. Чтобы обеспечить устойчивое развитие картофельной отрасли и глобальную продовольственную безопасность, существует острая необходимость в разработке картофелеуборочного комбайна, способного адаптироваться к различным рабочим условиям. Однако, хотя отечественные картофелеуборочные комбайны получили определенное развитие, между ними и зарубежными аналогами существует разрыв. Наблюдается меньшее количество применений в области автоматического вождения, интеллектуальной идентификации и точных операций. Точность и эффективность операций нуждаются в повышении, а их адаптируемость к сложному рельефу и различным почвам ограничена. При работе в холмистой и горной местности возникают такие проблемы, как плохая проходимость и трудность отделения картофеля от почвы. В целом, существуют недостатки, такие как низкий уровень интеллектуализации, недостаточная адаптируемость, а также недостаточная надежность и долговечность. Напротив, зарубежные технологии картофелеуборочных комбайнов являются сложными и дорогостоящими, что увеличивает затраты фермеров на покупку и эксплуатацию; таким образом, они невыгодны для использования в некоторых экономически слаборазвитых районах. Кроме того, для некоторых особых схем посадки или малораспространенных сортов картофеля отсутствие целенаправленного проектирования и оптимизации означает, что технология не может в полной мере удовлетворить разнообразные потребности в посадке.
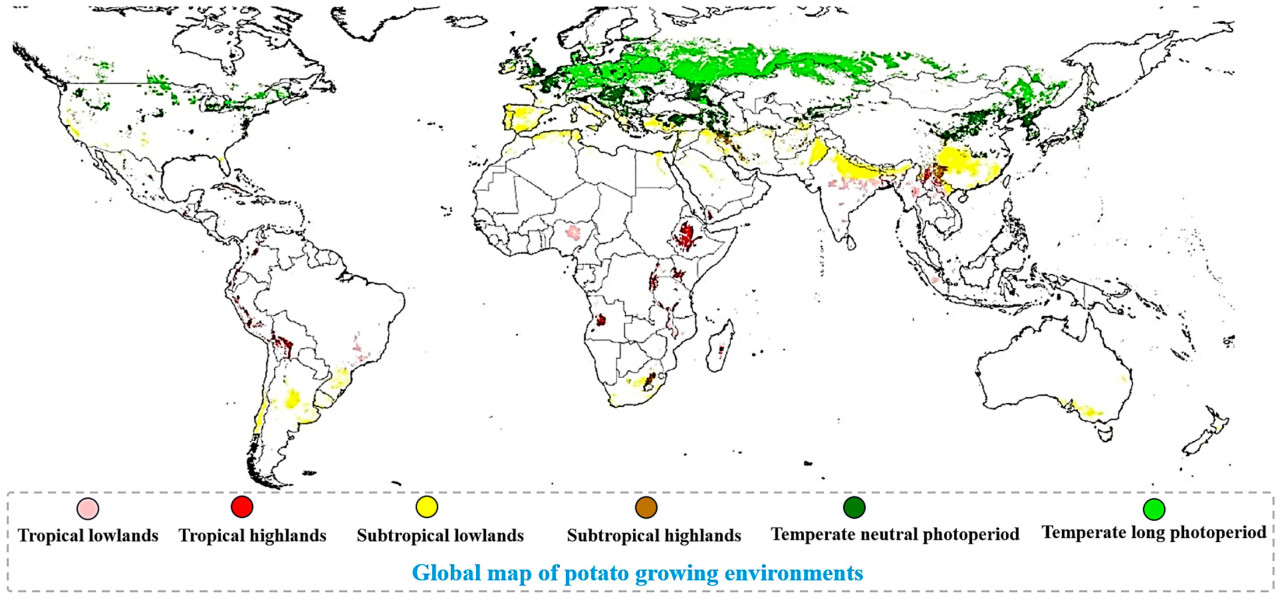
Рисунок 1. Карта глобального распределения зон выращивания картофеля [7].
С быстрым развитием компьютерных технологий [21] и материаловедения [22] цифровое проектирование и программное моделирование стали одними из основных методов инженерного проектирования [23,24,25] и нашли широкое применение в области инженерии [26,27]. Применение машинного обучения и суперкомпьютеров сделало возможным моделирование крупномасштабных инженерных проектов [28,29,30]. Метод дискретных элементов (МДЭ) является одним из основных методов решения динамических задач в дискретных системах. Этот метод включает численный расчет и анализ дискретных систем при условии учета таких взаимодействий, как контакты и разделения, взаимные перемещения, контактные силы между частицами и передача энергии. Таким образом, МДЭ нашел широкое применение в проектировании сельскохозяйственной техники, моделировании рабочих процессов, характеристиках потока почвы и исследованиях появления всходов [31,32,33,34].
Данные, включенные в эту статью, получены из источников Продовольственной и сельскохозяйственной организации ООН, Web of Science и др., а содержание и цитируемые ссылки взяты из таких источников, как материалы академических конференций, научные книги и академические журналы. К основным академическим журналам относятся "Computers and Electronics in Agriculture", "Agriculture", "Transactions of the Chinese Society for Agricultural Machinery", "Transactions of the Chinese Society of Agricultural Engineering" и др. Некоторый материал также взят из трудов академических конференций. Структура данного обзора следующая: Часть I представляет введение в производство картофеля и глобальные масштабы картофельной отрасли, а также проблемы, с которыми сталкиваются при механизированной уборке картофеля. Статистический анализ исследовательских работ по картофелю с 2013 по 2014 год показывает общую тенденцию к росту, что проиллюстрировано на рисунке 2a. Используя в качестве поисковых терминов "картофельная техника", "сельскохозяйственная техника" и "дискретный элементный анализ", была проведена статистическая оценка соответствующей исследовательской литературы, как показано на рисунке 2b. Можно заметить, что существует линейная корреляция между литературой по дискретному элементному анализу сельскохозяйственной техники и исследованиями картофельной техники. Часть II обобщает базовый принцип, контактную модель и механические параметры МДЭ, а также описывает процесс моделирования на основе программного обеспечения EDEM. Часть III рассматривает применение МДЭ в процессах механизированного выкапывания, транспортировки, сбора и сепарации почвы от картофеля во время уборки. Часть IV обобщает и описывает применение и недостатки МДЭ в исследованиях картофелеуборочных комбайнов.
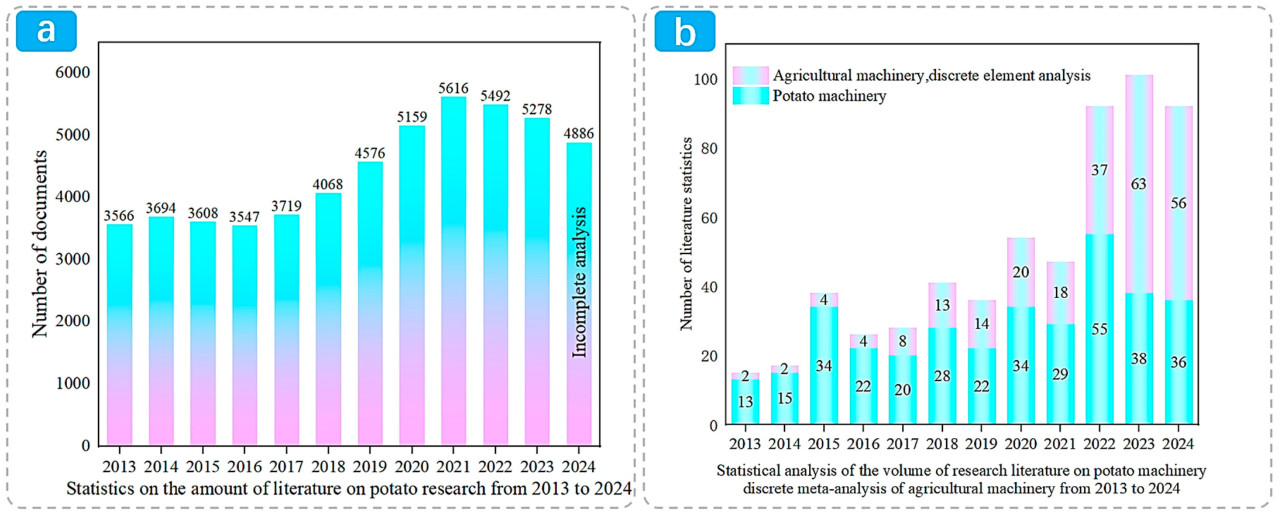
Рисунок 2. (a) Статистический анализ исследовательской литературы по картофелю. (b) Статистический анализ литературы по картофельной технике, сельскохозяйственной технике и дискретному элементному анализу.
2. Основные принципы метода дискретных элементов
МДЭ — это метод численного моделирования и расчета для анализа и решения законов движения и механических свойств сложных дискретных систем [35]. Метод рассматривает всю среду как ряд дискретных, независимо движущихся частиц, причем изменения в среде описываются характеристиками движения каждой единицы [36,37,38,39]. Первоначально применявшийся в исследованиях геотехнической механики, МДЭ использовался для описания движения таких разрывных сред, как почвы и горные породы [40,41]. Он предполагает, что между частицами существуют контакты, и частицы в дискретной системе могут перемещаться, вращаться или деформироваться. Согласно второму закону Ньютона, получают ускорение каждой частицы, а интегрирование по времени используют для расчета скорости и смещения дискретной системы [42,43]. С развитием компьютерных технологий МДЭ нашел широкое применение в инженерных исследованиях [44]. От проверки простых 2D-результатов моделирования до сложных 3D-процессов и от единичного моделирования МДЭ до комбинации МДЭ с другими технологиями была продемонстрирована превосходность МДЭ в инженерном проектировании [45,46]. Одновременно МДЭ также применялся в анализе динамики почвы. Он оценивает важность параметров частиц контактной модели при моделировании почвы и получает параметры для выбора частиц модели контакта Герца-Миндлина в зависимости от различного уровня влажности [47]. Развитие МДЭ включает уточнение контактных моделей и моделей формы частиц [48]. Выбор контактных моделей и определение параметров напрямую влияют на эффективность и точность моделирования МДЭ [49].
2.1. Контактная модель
Контактная модель описывает контактное поведение между частицами [50]. На ранних этапах развития МДЭ считалось, что действие на границе раздела частиц происходит либо через мягкий контакт, либо через жесткий контакт, что привело к важным выводам для численной модели разрывных тел [51,52]. В МДЭ каждая частица рассматривается как независимое твердое тело, а контактная модель используется для расчета сил и моментов между этими телами. В этом разделе представлено краткое введение в восемь распространенных контактных моделей в программном обеспечении для анализа МДЭ EDEM.
2.1.1. Контактная модель Герца-Миндлина без проскальзывания
Контактная модель Герца-Миндлина без проскальзывания — это модель, используемая для описания контактного поведения между сыпучими материалами и широко применяемая в моделировании МДЭ. Эта модель объединяет нормальную контактную силу из модели Герца и тангенциальную силу трения из модели Миндлина, формируя контактную модель Герца-Миндлина без проскальзывания [53,54]. Эта модель может всесторонне описывать контактное поведение между частицами, включая нормальные и тангенциальные соотношения сила-смещение, а также эффекты трения между частицами. Обычно она используется для моделирования взаимодействий между частицами и геометрическими формами. Чэнь и др. [55] провели анализ чувствительности прогнозирования МДЭ для износа скольжения одиночных частиц железной руды, что ускорило калибровку МДЭ для прогнозирования износа скольжения. Ли и др. [56] разработали математическую модель для системы взаимодействия "кукуруза-машина" на основе модели без проскальзывания Герца-Миндлина. Они вывели кинематические и динамические формулы для движения початков кукурузы под действием молотильного аппарата и создали модель силового анализа взаимодействий "кукуруза-кукуруза", как показано на рисунке 3a. Дополнительно они проанализировали контактные характеристики "кукуруза-кукуруза" на основе моделей Герца-Миндлина и связанной модели.
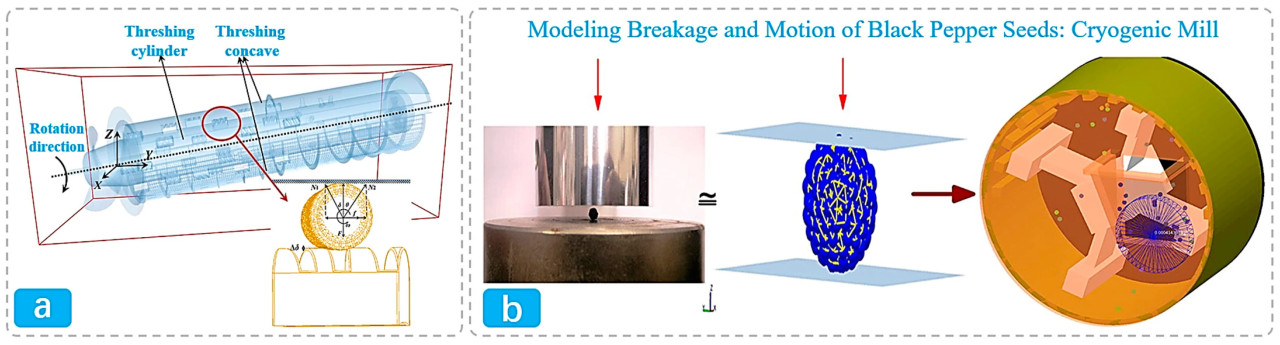
Рисунок 3. (a) Модель механического анализа кукурузы [56]. (b) Моделирование процесса дробления семян черного перца [57].
Таким образом, при численных расчетах МДЭ модель Герца-Миндлина требует калибровки параметров с использованием экспериментальных данных для обеспечения точности модели. Например, такие параметры, как модуль Юнга, коэффициент Пуассона и коэффициент трения частиц, следует измерять экспериментально для проверки согласованности между прогнозируемыми результатами модели и экспериментальными данными.
2.1.2. Связанная контактная модель Герца-Миндлина (Hertz-Mindlin Bonding)
Связанная контактная модель Герца-Миндлина специально разработана для моделирования адгезии и разрушения между частицами в программном обеспечении EDEM [58,59]. Между частицами проектируется слой "связующего", чтобы воспроизвести, как мелкие частицы слипаются и образуют более крупные агломераты. При воздействии внешних сил, если адгезионная сила между этими слипшимися частицами превышает максимальный предел, они разрушаются, создавая в моделировании эффект дробления частиц. Ахмад и др. [60] изучали взаимосвязь между влажностью почвы и когезионными частицами, используя связанную модель Герца-Миндлина, подтверждая применимость модели. Ван и др. [61] интегрировали модель Герца-Миндлина со связанной контактной моделью. Результаты динамического анализа были использованы для воспроизведения реальных сценариев бурения при одновременной минимизации вычислительных затрат. Годки и др. [57] объединили модель когезионных частиц с контактной моделью Герца-Миндлина для анализа процесса разрушения семян черного перца, как показано на рисунке 3b. Было обнаружено, что моделирование с помощью МДЭ лучше объясняет дробление и текучесть частиц в измельчителях.
Таким образом, связанная модель Герца-Миндлина позволяет частицам оставаться в связанном состоянии в определенном диапазоне нормальных и тангенциальных смещений до тех пор, пока не будет достигнуто максимальное напряжение сдвига связующей силы, после чего связь разрушается и частицы возвращаются к взаимодействию как твердые сферы. Эта модель особенно подходит для моделирования материалов, склонных к разрушению и дроблению под воздействием внешних сил, таких как горные породы и бетон.
2.1.3. Модель теплопроводности Герца-Миндлина
Модель теплопроводности Герца-Миндлина — это тип контактной модели в программном обеспечении EDEM, который учитывает эффекты теплопроводности при моделировании контактного поведения между частицами [62]. Будучи вариантом модели Герца-Миндлина, она добавляет расчет теплопроводности к основе модели Герца-Миндлина [63]. Модель Герца-Миндлина базируется на теории контакта Герца и тангенциальной силовой модели Миндлина-Дересевича, позволяя точно и эффективно рассчитывать нормальные и тангенциальные силы между частицами. Гуй и др. [64] анализировали смешивание частиц и теплопроводность на основе МДЭ, получив карты распределения температуры частиц, как показано на рисунке 4a. Исследование продемонстрировало эффективный метод теплопроводности между частицами. Модель теплопроводности Герца-Миндлина, на этой основе, добавляет механизм обновления температуры, позволяя теплопроводности между частицами передаваться через контакт, что подходит для случаев, требующих анализа температуры. Теплопроводность возникает после контакта частиц из-за разницы температур. Эта модель особенно подходит для приложений, где необходимо учитывать влияние теплопередачи при контакте частиц [65,66].
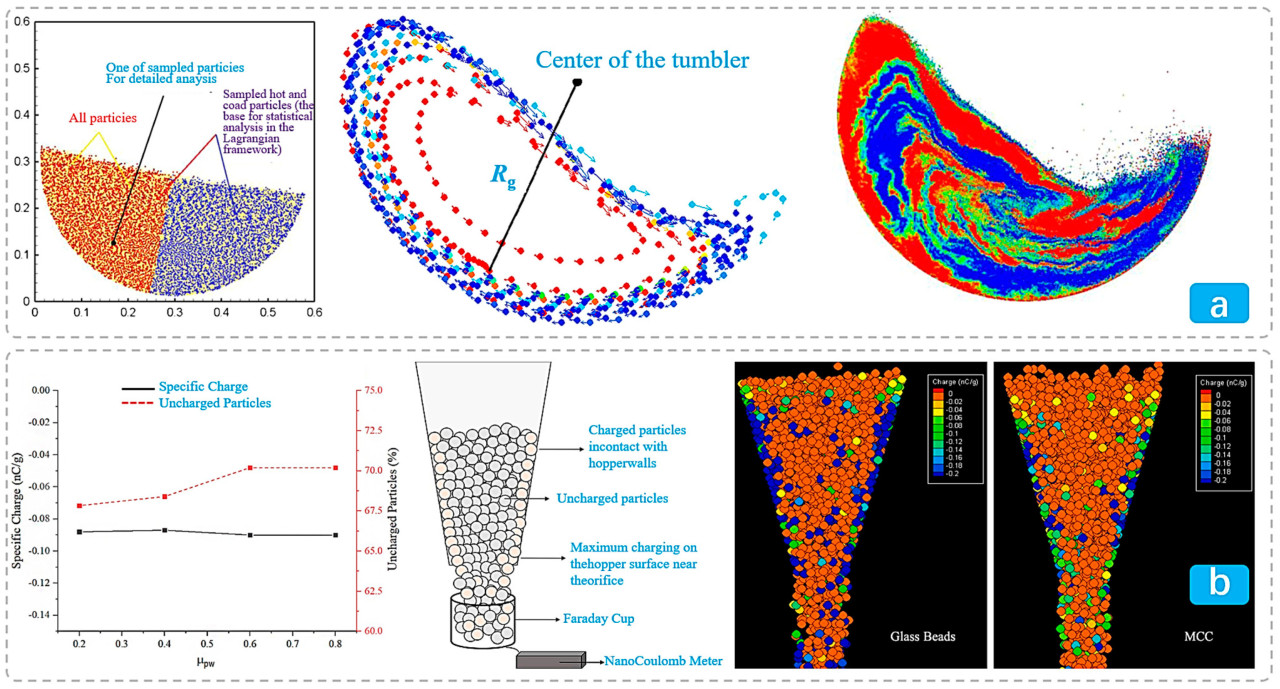
Рисунок 4. (a) Моделирование температуры частиц, передающих тепло [64]. (b) Анализ удельного заряда частиц, электризующихся трением [67].
2.1.4. Модель обновления температуры
Модель обновления температуры была предложена на основе теплового потока [68]. Это физическая модель в программном обеспечении EDEM, используемая для моделирования изменений температуры во время контакта частиц. Эта модель должна использоваться в сочетании с моделью теплопроводности, чтобы обеспечить правильное выполнение алгоритма теплопередачи. Она особенно подходит для тех прикладных сценариев, где необходимо учитывать эффекты теплопередачи в процессе контакта частиц, например, моделирование теплопередачи в потоке частиц во вращающемся контейнере.
2.1.5. Модель линейной когезии (Linear Cohesion)
Модель линейной когезии — это модель, используемая в программном обеспечении EDEM для моделирования связывания между частицами. Эта модель подходит для быстрых расчетов частиц с общей когезией, а также может использоваться для влажных материалов. В отличие от модели когезии JKR [69,70], которая рассчитывает силы сцепления, существующие как в нормальном, так и в тангенциальном направлениях контакта частиц, силы сцепления в этой модели существуют только в нормальном направлении. Модель линейной когезии учитывает силы сцепления между частицами, которые обычно вызваны межмолекулярными силами, электростатическими силами или влажностью. Во время моделирования, когда две частицы вступают в контакт и их поверхности достаточно близки, сила сцепления связывает их вместе. Эта модель особенно подходит для приложений, требующих моделирования поведения связывания между частицами, таких как процессы укладки, смешивания или формовки порошков.
2.1.6. Контактная модель линейной пружины
Контактная модель линейной пружины — это часто используемая в МДЭ модель для описания механического поведения частиц во время контакта. Эта модель основана на концепциях пружины и демпфера, где пружины моделируют упругие силы между частицами, а демпферы моделируют вязкое поведение. Модель линейной пружины обычно включает линейное упругое фрикционное поведение и вязкое поведение, которые действуют на очень малой площади, передавая, таким образом, только одну силу. Модель контакта линейной пружины имеет сходство с моделью контакта нелинейной пружины. Казерта и др. [71] изучали взаимосвязь между коэффициентом демпфирования и продолжительностью контакта в непрерывной контактной модели нелинейной пружины с демпфером в рамках МДЭ. Сравнение этой модели с нелинейными моделями контактной силы показывает, что предложенное приближенное соотношение может эффективно сократить время вычислений.
Таким образом, эта модель очень полезна при моделировании сыпучих материалов, особенно при моделировании взаимодействий частиц без необходимости в чрезмерно сложном контактном поведении. Например, ее можно использовать для моделирования потоков сыпучих материалов, укладки порошков и процессов смешивания. Благодаря своей простоте и вычислительной эффективности модель линейной пружины очень популярна в промышленных приложениях.
2.1.7. Контактная модель движущейся плоскости
Контактная модель движущейся плоскости моделирует линейное движение геометрий, при этом вся геометрия движется с одинаковой скоростью [72]. Только при использовании контактной модели движущейся плоскости для расчета контактной силы можно добавить линейную скорость к геометрии [73]. При настройке контактной модели движущейся плоскости в EDEM необходимо выбирать соответствующие модели и параметры на основе конкретного прикладного сценария и физических характеристик. Регулируя эти параметры, можно получить более реалистичные результаты моделирования.
2.1.8. Контактная модель электризации трением
Контактная модель электризации трением — это вычислительная модель, используемая для моделирования фрикционного и электростатического поведения сыпучих материалов во время контакта [74,75]. Эта модель обычно используется для изучения физических свойств сыпучих материалов, таких как обработка порошков, смешивание и разделение в промышленных процессах. Модель МДЭ учитывает контактные силы между частицами, включая упругие силы, силы трения и электростатические силы, а также то, как эти силы влияют на движение и взаимодействия частиц. Мукерджи и др. [67] прогнозировали явления фрикционной электризации во время разгрузки бункера с использованием имитационной модели на основе МДЭ. Была получена информация об удельном заряде при различном трении частица-стенка, как показано на рисунке 4b. Исследование показало, что во время моделирования разгрузки монодисперсных частиц из бункера ожидается, что примерно одна треть частиц останется неизменной, что приводит к относительно большому распределению заряда, сконцентрированному в малом объеме материала. Расэра и др. [76] моделировали и анализировали процесс фрикционной электризации в 2D и 3D с помощью МДЭ. Было обнаружено, что метод определения параметров модели фрикционной электризации для МДЭ является эффективным, что привело к хорошему согласию между данными моделирования и экспериментальными данными. Этот подход улучшит и упростит моделирование МДЭ фрикционной электризации при обработке сухих материалов.
2.2. Процесс моделирования
EDEM — это программное обеспечение для имитационного анализа МДЭ, широко используемое для моделирования сыпучих материалов. Общие шаги процесса моделирования в EDEM следующие: (1) Построение модели: Создание модели, определение формы, распределения по размерам и свойств материала частиц (например, плотность, коэффициент трения, модуль упругости и т.д.). Установка геометрической формы и свойств материала контейнера или оборудования. Определение метода генерации частиц, например, через бункеры, воздушный поток и т.д. (2) Настройка контактной модели: Выбор подходящей контактной модели, такой как модель линейной пружины с демпфером, нелинейная контактная модель и т.д. (3) Определение характеристик взаимодействия: Определение характеристик трения, качения и кручения между частицами. Если задействованы заряженные частицы, также необходимо настроить модель фрикционной электризации. (4) Инициализация моделирования: Установка начальных условий, таких как начальные положения, скорости и углы частиц. Определение временного шага и общей продолжительности моделирования. (5) Граничные условия и движущие силы: Определение граничных условий, таких как взаимодействие частиц со стенками контейнера. Добавление внешних сил, таких как гравитация, вибрация, воздушный поток и т.д. (6) Запуск моделирования: Запуск моделирования и выполнение расчетов на основе заданных параметров и моделей. Мониторинг процесса моделирования для обеспечения стабильности и соответствия расчетов ожиданиям. (7) Анализ результатов: Сбор и анализ данных моделирования, таких как скорости, положения, температура, распределение давления частиц и т.д. Использование встроенных инструментов EDEM или экспорт данных в другое программное обеспечение для углубленного анализа. (8) Валидация модели: Сравнение результатов моделирования с экспериментальными данными или теоретическими прогнозами для подтверждения точности модели. При необходимости корректировка параметров модели для повышения точности моделирования. (9) Оптимизация и итерация: Оптимизация процесса или оборудования на основе результатов моделирования. Может потребоваться несколько итераций моделирования для поиска наилучшего проектного решения. (10) Постобработка и отчетность: Создание диаграмм, анимации и других визуальных материалов для представления результатов моделирования. Пример показан на рисунке 5.
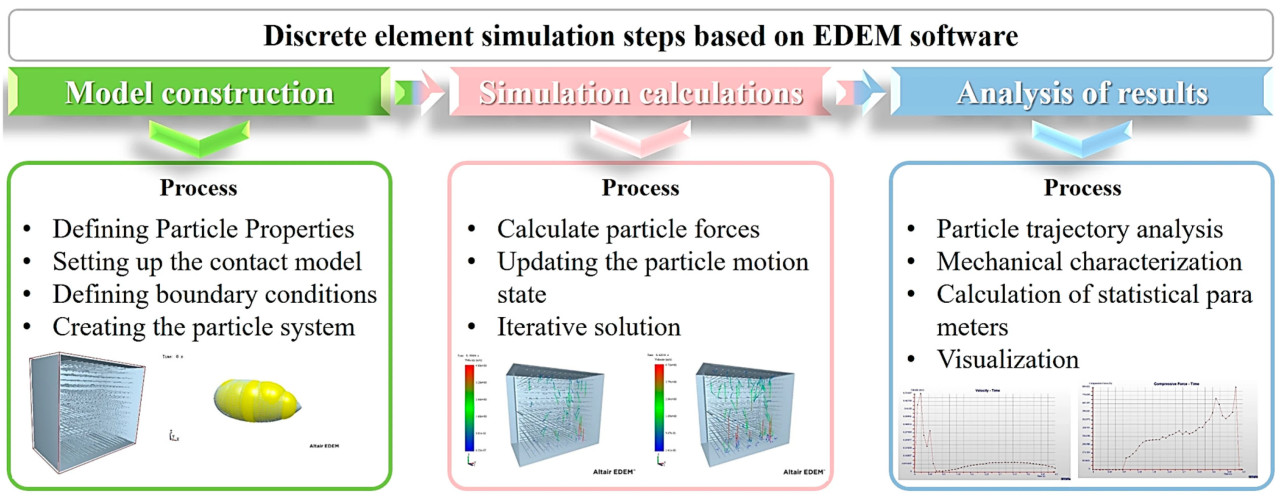
Рисунок 5. Этапы дискретно-элементного моделирования на основе программного обеспечения EDEM.
Программное обеспечение EDEM предоставляет удобный интерфейс и полный набор инструментов, помогающих пользователям эффективно выполнить вышеуказанный процесс. Кроме того, EDEM поддерживает интерфейсы с другим инженерным программным обеспечением, таким как CAD, CFD и т.д., для обеспечения многоуровневых и мультифизических связанных моделей.
2.3. Интеграция МДЭ в проектирование картофелеуборочных комбайнов
2.3.1. Ключевые этапы
Ввод механических параметров: Ключевые параметры конструкции картофелеуборочной техники, такие как форма, размер и угол вхождения выкапывающей лемеха, конструкция сепарирующего устройства, размер отверстий сита, а также размер и скорость вращения транспортирующих частей, вводятся в МДЭ. Одновременно устанавливаются рабочие параметры уборочной техники, такие как скорость движения, глубина копания и т.д.; они служат начальными условиями моделирования МДЭ и напрямую влияют на точность результатов моделирования.
Моделирование сыпучего материала: В модели МДЭ картофель и почва точно моделируются. Сыпучим материалам придаются соответствующие физико-механические свойства, включая плотность частиц, модуль упругости, коэффициент Пуассона, угол внутреннего трения, когезию и т.д., чтобы отразить реальные физические свойства картофеля и почвы. Механическое поведение картофеля во время уборки изучалось путем моделирования взаимодействия сыпучих материалов, а также взаимодействий между частицами и компонентами уборочной техники, таких как столкновение, трение, сжатие и так далее.
Вывод и обратная связь результатов моделирования: После запуска модели МДЭ для имитационного расчета выводится ряд данных о результатах моделирования, связанных с процессом уборки. Эти данные включают траекторию, скорость и ускорение частиц картофеля и почвы; силы взаимодействия между частицами и между частицами и поверхностями механических компонентов, такие как трение, сила сдавливания, сила соударения и т.д.; они также включают статистические данные о повреждениях, таких как повреждение кожуры и внутренний разрыв картофеля во время уборки, и информацию о степени и распределении нарушения почвы при копании и сепарации. Эти результаты моделирования передаются оператору, обеспечивая важную основу для оценки производительности уборочной техники, выявления потенциальных проблем, оптимизации конструкции машин и корректировки рабочих параметров.
2.3.2. Ключевые технологии
Моделирование механических частей: На основе фактической структуры и размеров картофелеуборочной техники с помощью программного обеспечения CAD точно создается трехмерная модель каждой механической части. В процессе моделирования подробно определяются форма и геометрические особенности компонентов, а также сборочные взаимосвязи и соединения между компонентами. Таким образом, физическая структура уборочной машины точно представляется в цифровой форме, что закладывает основу для последующего использования EDEM для имитационного анализа.
Моделирование сыпучего материала: В модели МДЭ используются соответствующие методы моделирования сыпучих материалов для имитации таких материалов, как картофель и почва. Распространенные методы моделирования сыпучих материалов включают модель сферических частиц, модель многогранных частиц, модель агрегированных частиц и т.д. На основе фактической ситуации и целей исследования выбираются подходящие методы моделирования сыпучих материалов и разумно устанавливаются такие параметры, как форма, распределение по размерам и плотность частиц. Например, для частиц почвы можно установить долю частиц в различных диапазонах размеров зерен в соответствии с текстурой и гранулометрическим составом и присвоить им соответствующие физико-механические свойства; для картофеля его можно упростить до сферических или эллипсоидальных частиц с определенной формой и размерами, принимая во внимание его механические свойства, такие как упругость и пластичность. Благодаря точному моделированию сыпучего материала можно более реалистично отразить поведение и взаимодействие сыпучих материалов в процессе уборки картофеля.
Контактные алгоритмы: В имитациях МДЭ точный расчет контактных сил между частицами и между частицами и поверхностями механических компонентов имеет решающее значение. Для достижения этой цели используются эффективные и надежные контактные алгоритмы для моделирования контактного поведения между частицами. Распространенные контактные алгоритмы включают модель линейной пружины с демпфером, контактную модель Герца-Миндлина и контактные алгоритмы, объединяющие метод дискретных элементов с методом конечных элементов. Эти контактные алгоритмы определяют величину и направление контактных сил на основе различных механических принципов и допущений путем расчета таких параметров, как относительное смещение и скорость между частицами. В практических приложениях важно выбрать подходящий контактный алгоритм на основе характеристик сыпучего материала и требований задачи моделирования. Кроме того, параметры в алгоритме должны быть соответствующим образом откалиброваны, чтобы обеспечить точность и надежность расчетов контактной силы, тем самым точно отражая взаимодействия между частицами в процессе уборки картофеля.
Параллельные вычисления: Моделирование МДЭ процесса уборки картофеля включает вычисление движения и взаимодействия большого количества сыпучих материалов, что приводит к существенной вычислительной нагрузке и требует длительного времени вычислений.
Извлечение и анализ данных: После завершения моделирования МДЭ ключевые данные, относящиеся к процессу уборки картофеля, извлекаются из файлов данных результатов моделирования. Эти данные включают информацию временных рядов, такую как положения, скорости, ускорения и силовые условия частиц, а также статистические данные о повреждении картофеля и уровне нарушения почвы. Используя методы и инструменты анализа данных, извлеченные данные подвергаются углубленному анализу и исследованию. Для расчета таких показателей, как уровень повреждения картофеля и распределение типов повреждений на разных этапах уборки, можно использовать методы статистического анализа, что позволяет оценить ущерб, наносимый уборочной техникой картофелю. Кроме того, для изучения изменений скорости и ускорения движения сыпучих материалов во времени, а также частотных составляющих и распределения энергии сил взаимодействия между частицами можно использовать методы временного и частотного анализа. Это помогает раскрыть динамические характеристики и механизмы взаимодействия в процессе уборки картофеля. Извлекая и анализируя данные результатов моделирования, можно получить подробную информацию и ценные выводы о процессе уборки картофеля, обеспечивая научную основу для оценки производительности, оптимизации конструкции и корректировки рабочих параметров уборочной техники.
Визуализация данных: Используя технологии визуализации данных, результаты моделирования МДЭ отображаются в форме интуитивно понятных и наглядных графиков, изображений, анимации и т.д., чтобы исследователи и инженеры могли наблюдать, понимать и анализировать механическое поведение и движение сыпучих материалов во время уборки картофеля. Распространенные методы и инструменты визуализации данных включают программное обеспечение для визуализации на основе компьютерной графики (такое как OpenGL, VTK и т.д.), профессиональные платформы для анализа и визуализации данных (такие как MATLAB, соответствующие библиотеки визуализации Python и т.д.) и некоторое коммерческое инженерное программное обеспечение для моделирования и визуализации.
Несмотря на многие преимущества использования МДЭ при моделировании сельскохозяйственной техники, существуют некоторые ограничения для крупномасштабных симуляций. Крупномасштабное моделирование включает большое количество частиц, при этом объем вычислений возрастает экспоненциально. Это требует поддержки высокопроизводительного оборудования, а длительное время, необходимое для вычислений, значительно увеличивает затраты. По мере увеличения количества частиц и сложности модели время моделирования значительно возрастает. Это снижает эффективность итеративной оптимизации конструкции и не позволяет своевременно реагировать на реальные потребности.
3. Глобальный анализ текущего состояния картофелеуборочной техники
Механизированная технология уборки картофеля объединяет процессы удаления ботвы, выкапывания, сепарации, сбора и погрузки. Германия, США, Италия, Польша и другие развитые страны уже достигли комплексной механизированной уборки картофеля к 1990-м годам; однако из-за ограничений по размеру машин, повреждений при уборке свежего картофеля и высоких цен требования к механизированной уборке картофеля в Китае не были выполнены. Картофелеуборочный комбайн состоит из различных компонентов — устройств для удаления ботвы, выкапывающих устройств, транспортирующих устройств, устройств для сепарации почвы и картофеля, силовых устройств и систем управления — что позволяет ему убирать созревший картофель. Это снижает стоимость уборки картофеля и способствует развитию картофельной отрасли.
3.1. Малые и средние картофелеуборочные комбайны
Исследователи разработали различные типы малых и средних картофелеуборочных комбайнов, предназначенных для холмистой и горной местности. Эти комбайны характеризуются высокой маневренностью, низкими эксплуатационными расходами и широкой применимостью. Они могут решать проблемы механизированной уборки картофеля на холмистых участках или небольших делянках. В этом разделе представлена сводка текущих типичных малых и средних картофелеуборочных комбайнов, как показано в таблице 1. Исследования малых и средних картофелеуборочных комбайнов в Китае начались относительно поздно, но в последние годы быстро развиваются. Предприятия и научно-исследовательские институты постоянно внедряют инновации, заимствуя и поглощая зарубежные технологии, и разработали множество продуктов, подходящих для условий страны. Они хорошо показали себя при уборке небольших делянок в условиях глинистых почв на холмах и в горах; однако общие показатели, надежность, интеллектуализация и другие аспекты все еще отстают от зарубежных аналогов. Международные исследования малых и средних картофелеуборочных комбайнов начались рано, и технология созрела. Картофель в Италии, Польше, Японии и Южной Корее в основном выращивается на небольших и разбросанных горных участках, и его уборка в основном осуществляется копателями-погрузчиками с подборщиками и стационарными сортировальными устройствами. В странах с крупномасштабными посадками картофеля и относительно ровным рельефом широко используются комбайны; эти страны достигли значительного прогресса в интеллектуализации и автоматизации, с стабильными характеристиками продукции и высокой надежностью.
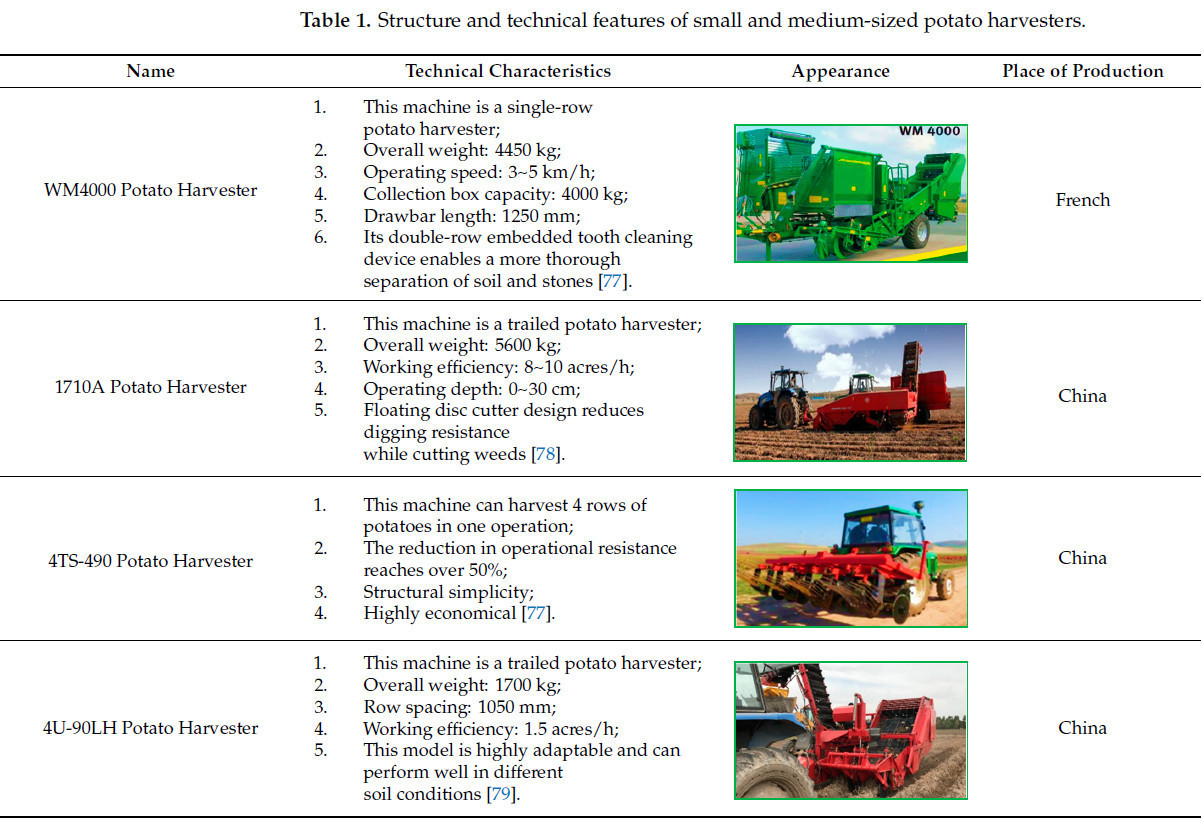
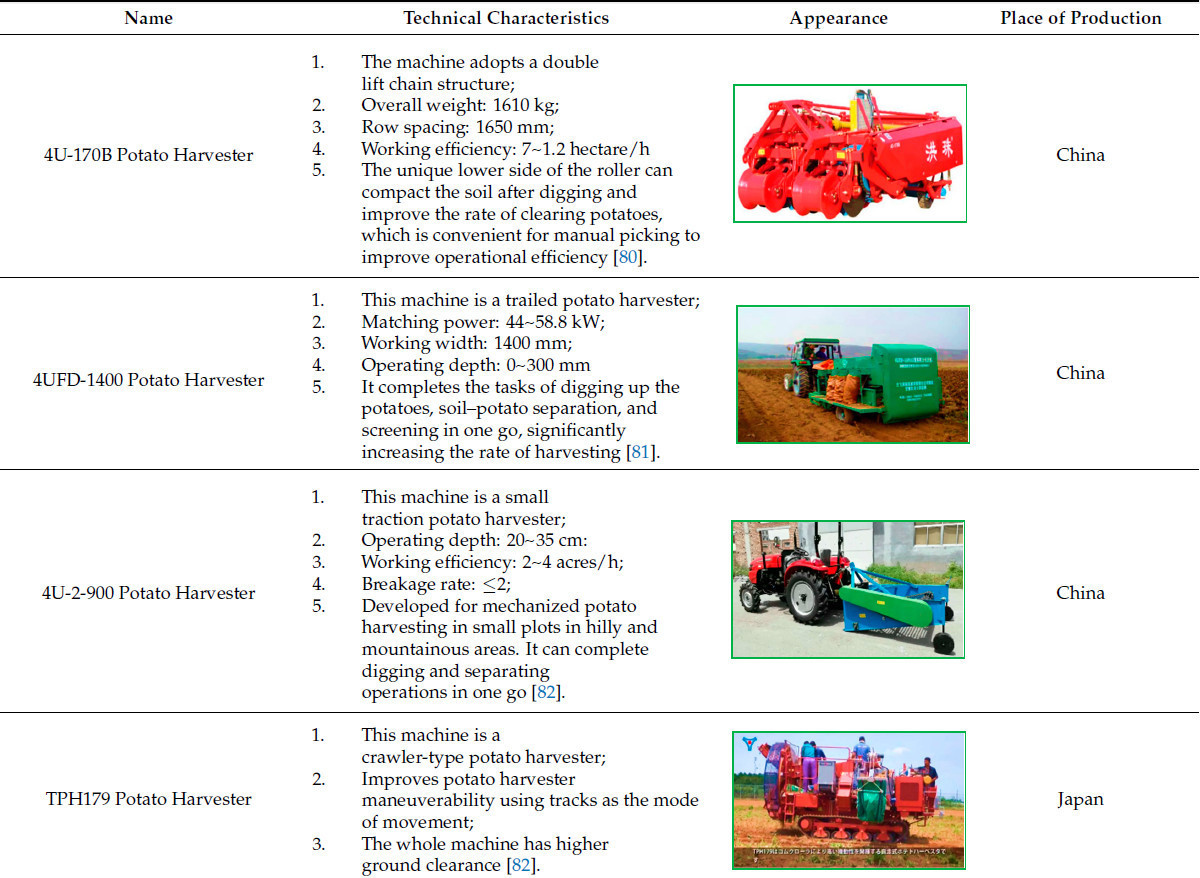
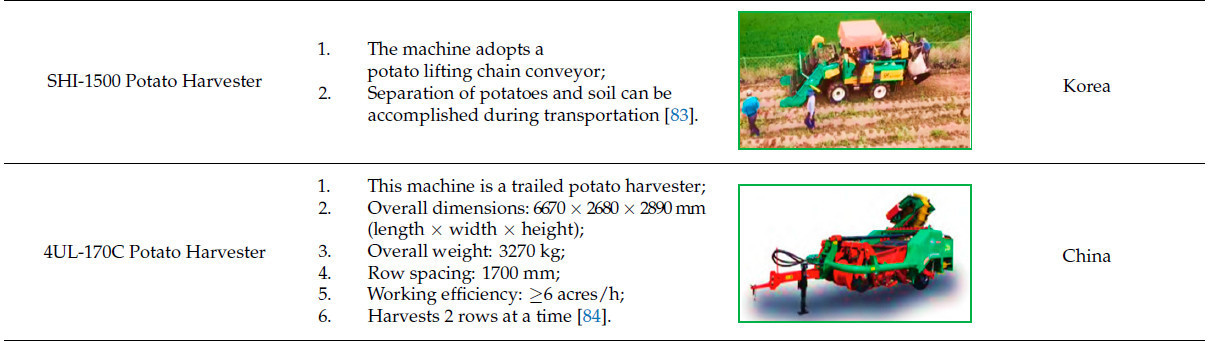
Таблица 1. Конструкция и технические особенности малых и средних картофелеуборочных комбайнов.
3.2. Крупные картофелеуборочные комбайны
Международные исследования крупных картофелеуборочных комбайнов начались рано, и технология достигла зрелой стадии. В регионах со значительным возделыванием картофеля, таких как Европа и Северная Америка, широко распространено использование комбайнов. Например, крупные комбайны в таких странах, как США и Нидерланды, оснащены эффективными функциями для выкапывания, сепарации, очистки и упаковки, что позволяет завершить уборочные операции за один проход. Эти машины также отличаются высокой степенью автоматизации и интеллектуальности, способны к автономному вождению, интеллектуальному распознаванию и точным операциям, что снижает потребность в ручном вмешательстве и повышает эффективность и качество работы. Кроме того, были внедрены передовые технологии, такие как сепарация картофеля и почвы, отделение стеблей и листьев и неразрушающий контроль, чтобы снизить уровень повреждения картофеля и улучшить качество уборки. В отличие от этого, исследования крупных картофелеуборочных комбайнов в Китае начались относительно поздно, но в последние годы быстро развиваются. Некоторые компании и исследовательские институты постоянно внедряют инновации путем заимствования и поглощения зарубежных технологий, создавая такие продукты, как комбайн 1710A от Zhongji Meinuo и картофелеуборочный комбайн 4U-1600. Хотя эти комбайны удовлетворяют определенные потребности крупных отечественных баз по выращиванию картофеля, по производительности, надежности и интеллектуальности они все еще отстают от передовых зарубежных комбайнов. Поэтому необходимы дальнейшие усилия в области исследований, разработок и технологических инноваций. Статистический анализ крупных картофелеуборочных комбайнов показал, что большинство из них зарубежного производства, как показано в таблице 2, причем несколько передовых моделей производит Grimme, такие как серия VARITRON и серия VENTOR 4150. Картофелеуборочная техника, производимая немецкой компанией GRIMME и бельгийской компанией AVR, может быть адаптирована для механизированной уборки других корнеплодов, таких как сахарная свекла и лук, путем замены передних выкапывающих и уборочных устройств и регулировки параметров сепарирующих и транспортирующих устройств. Такая конструкция значительно повышает коэффициент использования оборудования. Однако отечественная картофелеуборочная техника все еще с трудом адаптируется к уборке картофеля на разных типах почв.
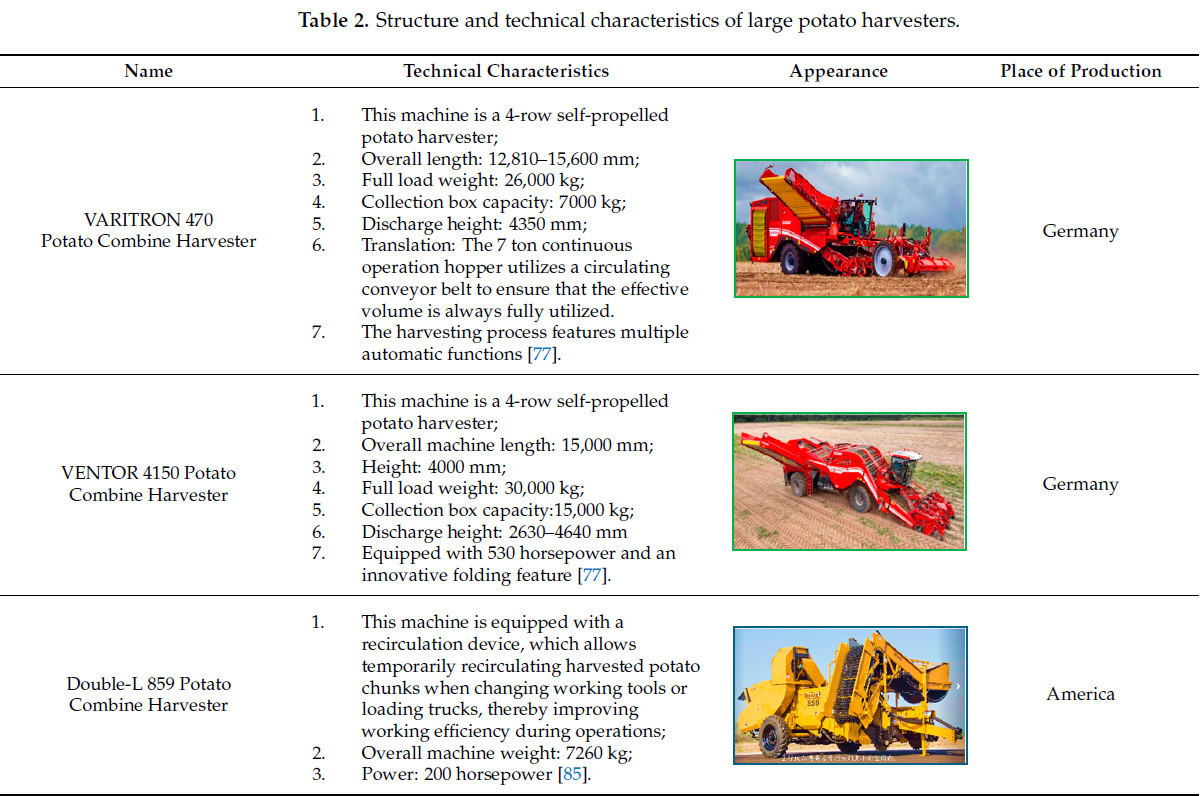
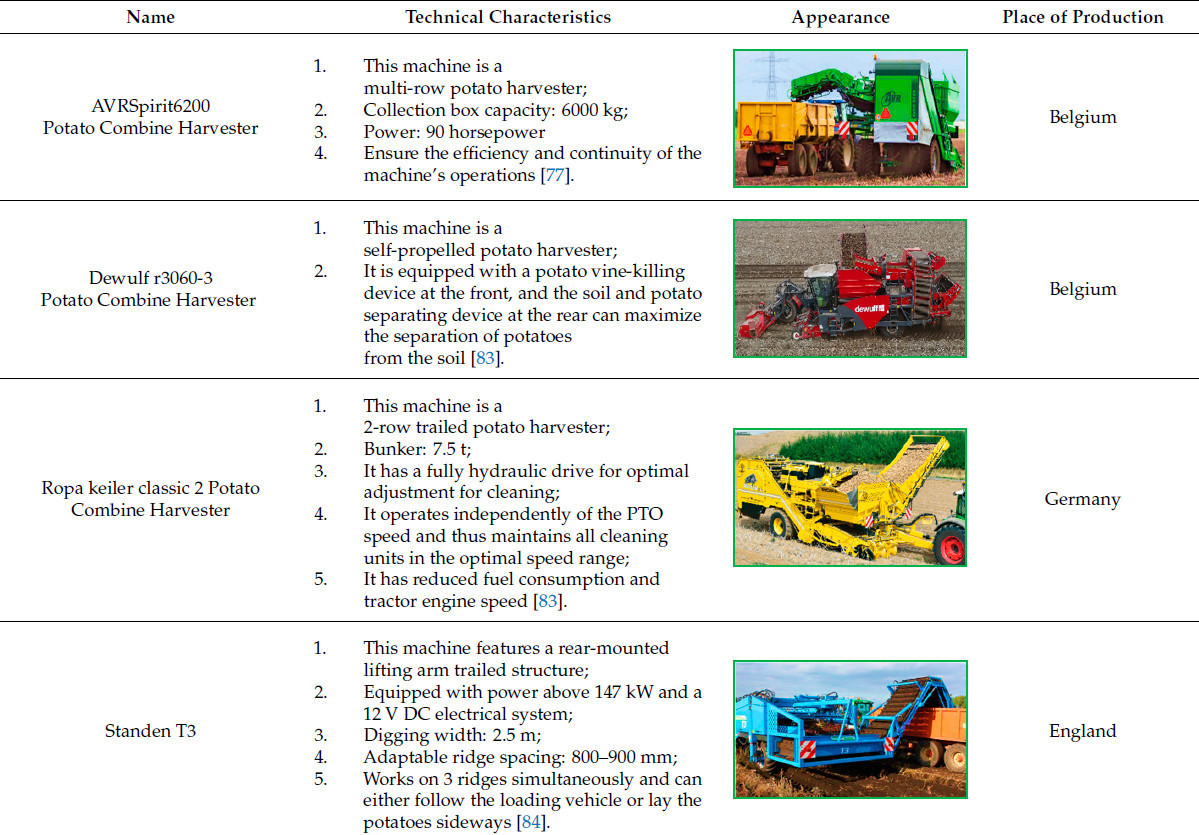
Таблица 2. Конструкция и технические характеристики крупных картофелеуборочных комбайнов.
4. Применение МДЭ в исследованиях картофелеуборочной техники
МДЭ, как новый дискретный численный метод анализа, нашел широкое применение в области сельскохозяйственной техники [86]. Его основные применения включают моделирование взаимодействия почвы и механизмов [87], моделирование распределения семян и удобрений [88], проектирование и оптимизацию уборочной техники [89], изучение транспортировки и сепарации материалов [90], исследование износа сельскохозяйственной техники [91], управление сельскохозяйственными отходами и оценку воздействия на окружающую среду [92]. МДЭ также предоставляет передовой метод для проектирования, оптимизации и оценки производительности сельскохозяйственной техники, способствуя повышению эффективности и устойчивости сельскохозяйственного производства [34,93,94]. В этом разделе в основном анализируется и обобщается применение МДЭ в исследованиях картофелеуборочной техники. Применение МДЭ в изучении картофелеуборочной техники включает дискретные имитационные процессы, такие как копание, транспортировка, сбор и сепарация. Моделируя взаимодействие между компонентами картофелеуборочного комбайна и почвой или картофелем, можно оптимизировать конструкцию картофелеуборочного комбайна, повысить уровень уборки, снизить уровень механических повреждений и ушибов, а также предложить решение для разработки механизированного уборочного оборудования для клубнеплодных культур.
4.1. Моделирование и анализ процесса выкапывания
В настоящее время методы выкапывания картофеля в основном делятся на традиционные ручные и современные механические методы [36,95]. При механических методах копания используются фиксированные выкапывающие лемехи, которые имеют высокое сопротивление резанию, энергопотребление и сильный износ кромки лемеха [96]. Другим методом является биомиметическое копание, которое включает проектирование выкапывающих лемехов на основе биомиметических принципов; например, лемехи проектируются с контуром, напоминающим когти медведки, что может снизить горизонтальное сопротивление и нормальное напряжение, тем самым улучшая крошение почвы и эффективность ее отвода [97]. Поскольку процесс выкапывания картофеля включает взаимодействия между картофелем и техникой, а также почвенной системой и техникой, исследование механизации выкапывания картофеля предоставит эффективный способ снижения механических повреждений картофеля и повышения эффективности копания. Однако на данном этапе имитационная дискретная модель картофеля представляет собой многосферический полимер, полученный на основе контактной модели Герца-Миндлина в программном обеспечении для дискретного моделирования (EDEM). Эта модель предполагает, что кожура и мякоть картофеля имеют одинаковые механические свойства. Такой упрощенный подход к моделированию уборки картофеля препятствовал изучению механизмов повреждения картофеля при механизированной уборке методом дискретных элементов. Гай и др. предложили новую двухслойную гибкую связанную модель картофеля на основе метода дискретных элементов. Эта модель точно моделирует механические свойства картофеля и одновременно имитирует характеристики повреждения кожуры и мякоти. Параметры связывания двухслойной гибкой модели для образцов картофеля были уточнены с помощью калибровочных испытаний на сдвиг, что дало оптимальную комбинацию параметров. Были проведены проверочные испытания на сдвиг и сжатие всего стебля картофеля, и средняя относительная погрешность между результатами экспериментов и имитационных испытаний составила e = 3,25% [98]. Предложенная в этом исследовании модель картофеля позволяет более точно моделировать механические свойства картофеля.
Механические повреждения при уборке картофеля составляют 70% от общего ущерба во всей системе производства картофеля. Чтобы снизить уровень механических повреждений картофеля, Лян и др. [99] использовали метод дискретных элементов для изучения динамики и кинематики процесса сепарации почвы и картофеля. Они определили эквивалентный модуль Юнга двух сортов картофеля с помощью квазистатических нагрузочных экспериментов. Механические параметры картофеля были получены с помощью экспериментальных установок, и была разработана модель контактной силы. Результаты показали, что недавно разработанная модель (R2 = 0,91 ± 0,06) превзошла модель Кувабары и Коно (модель КК) (R2 = 0,49 ± 0,09) и модель Йигита-Христофору (модель ЙХ) (R2 = 0,28 ± 0,13). В этом исследовании квазистатические и динамические свойства материалов двух сортов картофеля были измерены с помощью универсальной испытательной системы и самостоятельно разработанного устройства для сбора информации о динамическом ударе. Точность различных контактных моделей для переходных процессов удара проверялась путем расчета модуля Юнга и анализа информации об ударе образцов картофеля. Была разработана и валидирована вязкоупругопластическая контактная модель, разработанная специально для картофеля. Анализ выявил значительные различия между измеренными и подобранными значениями пиковых сил для модели КК, что указывает на возможную переоценку коэффициента диссипации на фазе разгрузки. Менее удовлетворительная подгонка модели ЙХ по сравнению с измеренными кривыми может быть связана с ее зависимостью от чисто упругих или чисто пластических уравнений, которые могут неадекватно отражать сложное поведение картофеля. С другой стороны, недавно разработанная модель очень хорошо соответствует измеренным данным и способна лучше описывать динамическое механическое поведение картофеля независимо от скорости удара. Это исследование не только предоставляет осуществимый экспериментальный метод и модель контактной механики для изучения динамических механических свойств картофеля, но и закладывает основу для будущей разработки дискретных моделей элементов для систем сепарации почвы и картофеля. Ли и др. [96] разработали выкапывающий лемех для картофеля, специально предназначенный для глинистых сред, на основе бионического принципа чешуи панголина. Они использовали МДЭ для моделирования сопротивления, с которым сталкивается бионический лемех в процессе копания, как показано на рисунке 6a. Движение частиц почвы на плоском лемехе хаотично, и количество зеленых стрелок также меньше, чем на бионическом лемехе. Большинство частиц почвы имеют скорость менее 0,788 м/с, в то время как скорость лемеха составляет 0,84 м/с. Однако скорости частиц почвы, движущихся по плоскому лемеху, обычно меньше скорости лемеха. Это ясно указывает на то, что частицы почвы осаждаются на лемехе, что приводит к общему снижению скорости и потенциально препятствует движению частиц почвы. Этот результат объясняет, почему сопротивление плоского лемеха больше, чем у бионического лемеха. Исследование показало, что лучший бионический прототип имел коэффициент снижения 22,26% при испытаниях в почвенном боксе и 14,19% при полевых испытаниях. Е и др. [100] моделировали распределение и траекторию копания частиц с помощью связи МДЭ-МДД (MBD). Результаты моделирования выявили критическую точку при влажности 10% в песчаной почвенной среде, где прочность на сдвиг уменьшалась с увеличением влажности. Характер изменения результатов моделирования соответствовал теоретическим расчетам, показывая, что снижение сопротивления копанию было пропорционально прочности сцепления при полном сдвиге частиц. Кривые копания, полученные в эксперименте, соответствовали результатам моделирования по погрешностям ключевых параметров. Ли и др. [97] разработали картофелекопатель с продольно-волновым лемехом на основе бионических принципов и провели имитационное исследование с использованием МДЭ для сравнения процесса копания бионического продольно-волнового лемеха с обычным выкапывающим лемехом, как показано на рисунке 6b. Бионический продольно-волновой картофелекопатель вызвал большее нарушение почвы, что привело к лучшему потоку почвы. Авторы также теоретически объяснили механизм снижения сопротивления бионических элементов. Бионический продольно-волновой картофелекопатель снизил сопротивление на 14,45%, уровень заглубления картофеля на 1,34% и уровень повреждения картофеля на 0,736%. Чтобы повысить эффективность уборки картофелеуборочных комбайнов, Ли и др. [95] основывали свою работу на моделировании в сочетании с экспериментальными подходами. Они улучшили конструкцию сепарирующего и транспортирующего механического оборудования картофелекопателей на тяжелых почвах, сосредоточившись на выборе решетчатого выкапывающего лемеха. Этот выкапывающий лемех гарантирует, что в последующее сепарирующее устройство попадает минимальное количество почвы, одновременно максимально защищая картофель от повреждений, тем самым снижая нагрузку на последующее сепарирующее устройство.
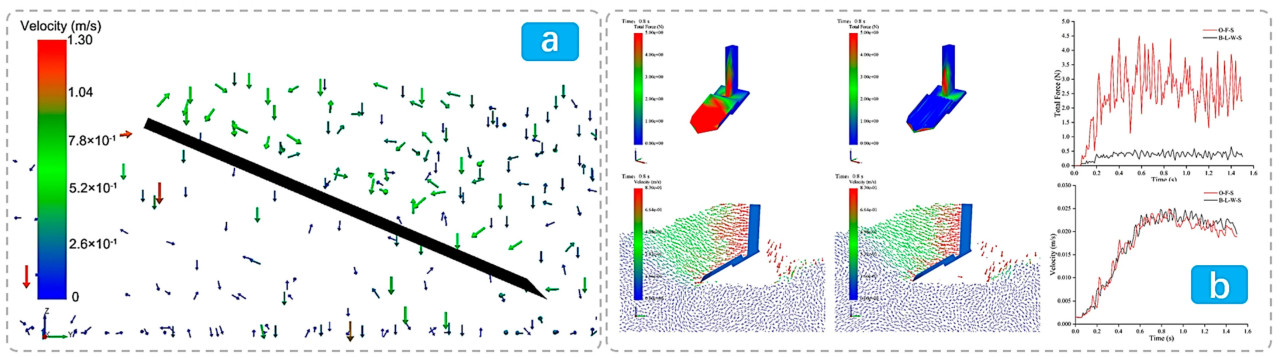
Рисунок 6. (a) Анализ сопротивления копанию, с которым сталкивается бионический лемех [96]. (b) Анализ процесса копания продольно-волнового картофельного лемеха [97].
Таким образом, метод дискретных элементов (МДЭ) может моделировать взаимодействие между почвой и картофелем, позволяя рассчитать силы трения и сжатия между ними. Это помогает уточнить потенциал этих сил для повреждения кожуры картофеля и позволяет отслеживать траектории движения картофеля в почве, обеспечивая основу для оптимизации выкапывающего оборудования. С точки зрения проектирования оборудования, МДЭ может моделировать условия работы выкапывающих компонентов различной формы и конструкции, сравнивая силы, действующие на различные конструкции лемехов во время выемки грунта, и их влияние на повреждение картофеля, тем самым способствуя улучшению формы компонентов. Кроме того, он может моделировать влияние рабочих параметров, таких как скорость копания и глубина проникновения в почву, на результаты выемки, позволяя регулировать оптимальные параметры для повышения эффективности копания и снижения повреждения картофеля, в конечном итоге поддерживая эффективные и высококачественные операции по уборке картофеля.
Таким образом, процесс выкапывания картофеля является сложной механической операцией, включающей взаимодействие между почвой и техникой, картофелем и техникой, а также картофелем и почвой. МДЭ может обеспечить интуитивное понимание процесса выкапывания картофеля, включая взаимосвязь между частицами почвы и картофелем. Согласно результатам моделирования, можно оптимизировать механическую конструкцию картофелекопательной машины, тем самым увеличивая выход убранного картофеля.
4.2. Моделирование процесса сепарации картофеля от почвы
Моделирование процесса сепарации картофеля от почвы является важнейшим этапом в механизированной уборке картофеля [101,102]. Его цель — отделить клубни картофеля от почвы [103]. Этот процесс также имеет наибольшую вероятность вызвать механические повреждения и ушибы клубней картофеля [104,105,106]. В настоящее время при механизированной уборке картофеля существует несколько основных проблем: как тщательно отделить картофель, почву и примеси, одновременно контролируя уровень механических повреждений и ушибов картофеля [107,108]. Существующие картофелеуборочные комбайны приводят к неудовлетворительному разделению картофеля и почвы, высокому уровню механических повреждений и ушибов и низкому уровню уборки картофеля [109]. Применение МДЭ в сельскохозяйственной технике сделало возможным моделирование процесса сепарации картофеля от почвы. За последние годы было опубликовано большое количество имитационных исследований. Ли и др. [110] исследовали принцип работы и эффективность сепарации устройства для отделения картофеля от почвы, сосредоточившись на характеристиках соударения между картофелем и поверхностью грохота и прутками. Ключевыми факторами считались линейная скорость сепарирующего грохота, скорость движения комбайна и угол наклона сепарирующего грохота. Имитационные испытания проводились на основе метода связи МДЭ-МДД. Оптимальная комбинация параметров для устройства сепарации картофеля от почвы была определена как линейная скорость 1,25 м/с, скорость движения 0,83 м/с и угол наклона 25°. Полевые эксперименты по уборке показали, что уровень потерь картофеля составил 1,8%, уровень повреждений — 1,2%, уровень примесей — 1,9%, уровень повреждения кожуры — 2,1%, а производительность — 0,15–0,21 га/ч. Это исследование предоставляет ценные теоретические ссылки для моделирования сепарации картофеля от почвы в картофелеуборочных комбайнах и оптимизации параметров этих устройств.
Для решения проблем плохого отделения картофеля от почвы и высокого уровня повреждения картофеля Чэнь и др. [101] разработали ротационное вибрационное устройство для сепарации картофеля и раскрыли процесс его работы с помощью связи МДЭ-МДД, как показано на рисунке 7. Оптимальные рабочие параметры для процесса сепарации были определены как положение точки вибрации 646,5 мм, скорость транспортировки подъемной цепи для сепарации картофеля от почвы 1,08 м/с, амплитуда ротора 26,7 мм и частота вибрации ротора 5,9 Гц. Полевые проверочные эксперименты были проведены на основе этих оптимальных параметров, при этом эффективность сепарации картофеля от почвы и уровень повреждения картофеля составили 97,8% и 1,16% соответственно в роторном вибрационном устройстве для сепарации картофеля. Результаты полевых испытаний соответствовали результатам моделирования, подтверждая точность имитационной модели. Теоретический МДЭ предоставляет ссылки для моделирования ротационного вибрационного процесса сепарации картофеля от почвы и оптимизации параметров устройства. Для решения проблемы низкого выхода целого картофеля Ду и др. [111] разработали устройство для сепарации картофеля от почвы, сочетающее левое и правое вращение. Они проанализировали модель МДЭ для сепарирующего ролика картофеля, как показано на рисунке 8. Было продемонстрировано, что порог силы для повреждения кожуры картофеля составляет от 190 до 195 Н. При угле наклона устройства 6°, скорости вращения сепарирующего ролика 100 об/мин, межосевом расстоянии сепарирующих роликов 79 мм уровень повреждений составил 1,25%, выход целого картофеля — 99,01%, а уровень повреждения кожуры — 1,58%. В отличие от этого, при угле наклона 8°, скорости вращения сепарирующего ролика 80 об/мин, таком же межосевом расстоянии 79 мм, уровень повреждений увеличился до 1,43%, выход целого картофеля снизился до 98,64%, а уровень повреждения кожуры составил 1,77%. Чтобы понять динамическую взаимосвязь между повреждением и сепарацией почвы во время уборки картофеля с использованием картофелеуборочных комбайнов, Ли и др. [112] исследовали механизм работы пруткового сепаратора в малом самоходном картофелеуборочном комбайне и производительность сепарации клубней от почвы. Связанная модель была проанализирована с использованием МДЭ-МДД и однофакторных имитационных экспериментов. Полевые испытания были валидированы и выявили погрешность 3,81% между имитационной моделью и полевой уборкой. Однако Янь и др. [113] провели имитационное исследование процесса дробления и сепарации комков почвы с картофелем на основе МДЭ. В исследовании моделировался механизм разрушения и отделения почвенных комков. Трехмерная модель сепарирующего устройства была упрощена в SolidWorks и импортирована в программное обеспечение для дискретного элементного анализа (EDEM 2022). Моделирование разрушения почвы и сепарации показано на рисунке 9a. По мере вращения лопасти над агрегатами почвы и картофеля почва разбивается из-за соударений. Впоследствии разница скоростей между лопастью и подъемной цепью заставляет агрегаты почвы и картофеля двигаться вдоль поверхности подъемной цепи к концу, непрерывно разрушая и отделяя прилипшие частицы почвы. Разрушение и сепарация почвы и картофеля изучались в районах с супесчаными почвами.
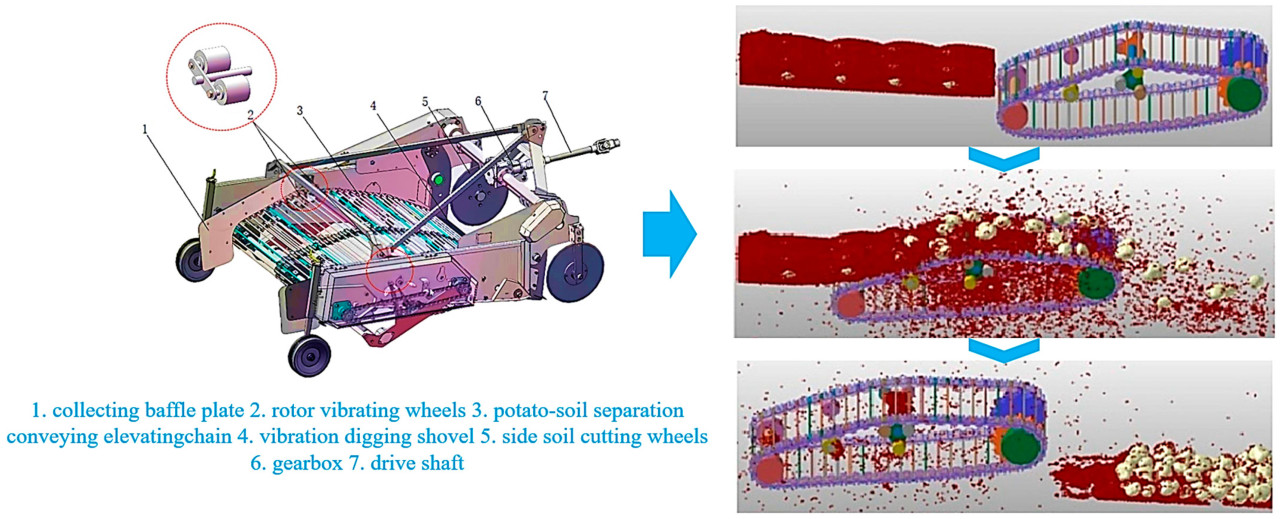
Рисунок 7. Моделирование ротационной вибрации процесса сепарации картофеля от почвы с использованием устройства для сепарации картофеля [101].
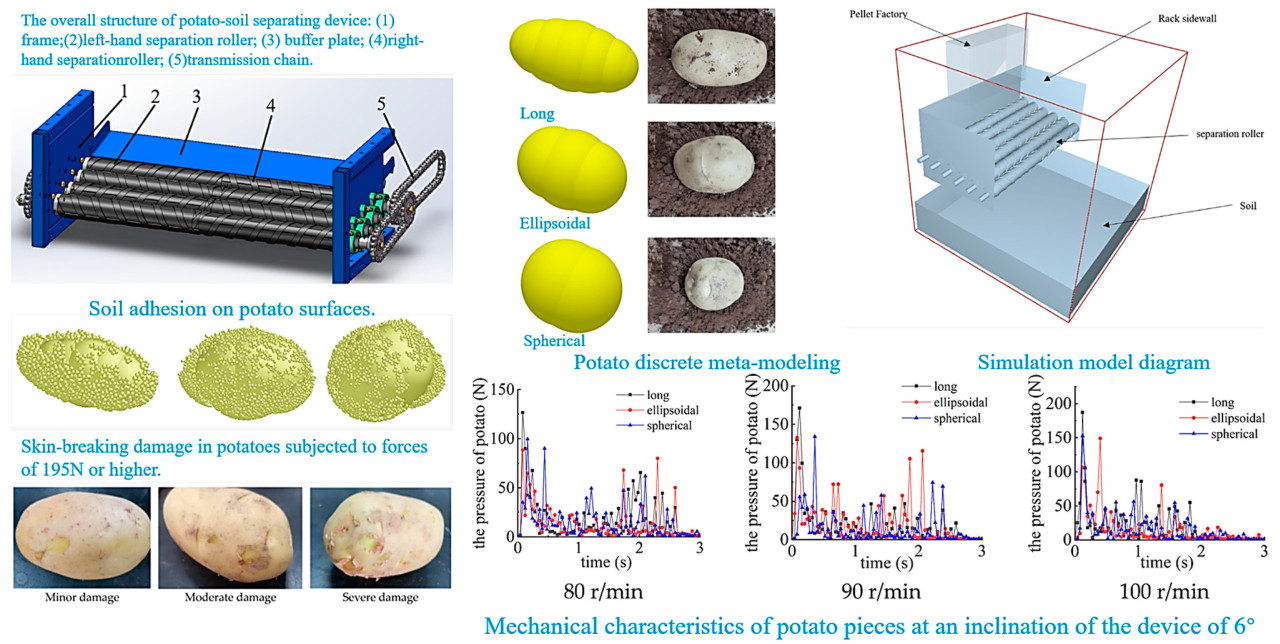
Рисунок 8. Комбинированный лево-право вращающийся сепаратор картофеля и дискретный элементный анализ [111].
Таким образом, процесс сепарации картофеля от почвы является случайным. Частицы в разных положениях подвергаются незначительным изменениям в смеси почвы и картофеля и транспортерной цепи; это коррелирует с качеством смеси почвы и картофеля при различных скоростях уборки. Когда угол сепарирующей ленты увеличивается, мелкие частицы почвы могут быстрее отсеиваться через зазоры, улучшая эффект удаления почвы. Чем выше линейная скорость сепарирующей ленты, тем быстрее отсеивается почва; однако это приводит к сокращению времени отсеивания почвы на сепарирующем устройстве, что приводит к плохой эффективности очистки почвы. Энергия, необходимая для разрушения почвенных комков, в основном зависит от формы и характеристик комков, таких как влажность. Энергия разрушения, генерируемая при столкновениях, связана не только с массой сепарирующей ленты и почвенной массы, но и с начальной скоростью перед столкновением. Вибрация и разрушение почвенных комков определяются комбинацией различных линейных скоростей сепарирующей ленты и общей массы смеси почвы и картофеля на сепарирующем механизме. Увеличение линейной скорости прутка влияет на его вибрацию и способствует разрушению почвенных комков. Чтобы гарантировать, что картофель получит как можно меньше повреждений во время первого процесса сепарации в комбайне, клубни могут быть защищены почвой. Это связано с тем, что после первой сепарации картофеля от почвы эта часть почвы пройдет через ряд механизмов вторичного удаления почвы, включая подъемный механизм. Это также обеспечивает способность комбайна к удалению почвы. Моделирование процесса сепарации картофеля от почвы было представлено на основе МДЭ, который использовался для анализа механизма сепарации картофеля. Механическая конструкция картофелеуборочного комбайна была эффективно оптимизирована, и были определены наилучшие рабочие параметры. Это привело к повышению эффективности сепарации картофеля от почвы, снижению уровней механических повреждений и ушибов картофеля в процессе сепарации и увеличению количества товарного картофеля.
4.3. Моделирование процесса транспортировки
Процесс транспортировки картофеля можно разделить на три этапа. Первый этап включает подачу картофеля в комбайн, где картофель транспортируется через подъемный транспортер [114], устройство сепарации почвы и другие механизмы к блок сортировки. Второй этап состоит из сортировки и транспортировки картофеля к сборному устройству. Третий этап включает транспортировку картофеля в хранилище с помощью транспортного средства [115]. По сравнению с процессами копания и сепарации почвы, процесс транспортировки наносит меньшие механические повреждения и ушибы картофелю. Однако трение между клубнями картофеля приводит к более высокому уровню ушибов; поэтому связанный имитационный анализ этого процесса является важным средством повышения эффективности транспортировки и снижения повреждений при транспортировке.
Се и др. [116] использовали программное обеспечение EDEM для моделирования механизма транспортировки и сепарации картофеля и почвы и получили оптимальную комбинацию рабочих параметров. Линейная скорость транспортерной цепи была установлена на 2,3 м/с, угол наклона — 18 градусов, а амплитуда — 8 мм. Для проверки результатов были проведены полевые эксперименты. Результаты моделирования продемонстрировали значительное улучшение производительности. Наконец, путем определения оптимальных рабочих параметров и внедрения структурных инноваций была достигнута оптимизация механизма транспортировки и сепарации почвы и картофеля. Ли и др. [95] использовали численное моделирование для оптимизации сепарирующей и транспортирующей техники картофелеуборочного комбайна. Они выбрали решетчатый выкапывающий лемех, который гарантирует, что количество почвы, попадающей в последующее сепарирующее устройство, минимально, не выкапывая картофель, и снижает нагрузку на последующие сепарирующие устройства. Чжан и др. [117] провели исследование почвоподъемного устройства для картофеля на основе теории ТРИЗ. Они использовали связанную модель МДЭ-МДД для моделирования процесса работы устройства, получив оптимальные рабочие параметры. Сунь и др. [118] моделировали процесс транспортировки несферических частиц в винтовом механизме на основе МДЭ, как показано на рисунке 9b. Моделирование МДЭ показывает, что форма частиц влияет на поведение потока частиц и износ транспортера. Впоследствии были получены количественные оценки массового расхода и потребляемой мощности для изучения влияния сферичности частиц при различных рабочих параметрах. Частота соударений частиц и энергозатраты на соударения были получены для исследования возможного разрушения частиц при соударениях между частицами и с винтовой лопастью. Сравнение соударений частица-частица и частица-стенка показало, что частицы с большим индексом формы более склонны к повреждению при соударениях частица-стенка. Это исследование расширяет методы транспортировки картофеля. Чтобы снизить уровень повреждения картофеля во время транспортировки, МакРэй и др. [119] изучили транспортер для картофеля, оснащенный устройством автоматического контроля высоты выгрузки. Это устройство управления состоит из датчика-шарика, установленного на конце транспортера, и пневматического выключателя, который активирует электромагнитный клапан для управления плунжером гидравлического подъема. Транспортер разделен на две секции, причем дистальная секция может качаться в боковом направлении при ударе о задний борт прицепа. Гэн и др. [115] изучали влияние начального направления на траекторию картофеля при различных начальных скоростях, используя квадратичные коэффициенты. Они обнаружили, что влияние уменьшается с увеличением начальной скорости, и существует относительно стабильное состояние, когда начальная скорость превышает 2,0 м/с. Торрес-Серра и др. [120] использовали моделирование МДЭ для понимания влияния эффектов на уровне частиц на текучесть. Они исследовали влияние размера, формы и гигроскопичности частиц на различные проблемы обработки насыпных грузов. В исследовании сравнивалось распространение потока сухих монодисперсных сферических частиц с системами частиц, содержащими дисперсию по размерам, вытянутые сфероидальные частицы и жидкое содержание в капиллярном состоянии. Это исследование демонстрирует, что МДЭ может быть эффективным инструментом для характеристики сложных потоков частиц и улучшения технологий обработки насыпных грузов. Из-за дискретных и нелинейных характеристик материалов макроскопическая характеристика материалов зависит от изменений масштаба движения внутри них. Жэнь [121] разработал дискретную модель элементов для изучения динамических характеристик мезомасштабно-ориентированного потока материала, получив механизм влияния различных рабочих параметров на состояние движения материала. Анализируя мезомасштабные данные, было обнаружено, что скорость перемещения и скорость вращения являются основными факторами, влияющими на дальнее перемещение и скорость материала соответственно. Ши и др. [122] также провели всесторонний обзор и анализ МДЭ в системах пневмотранспорта порошков в области транспортировки порошков.
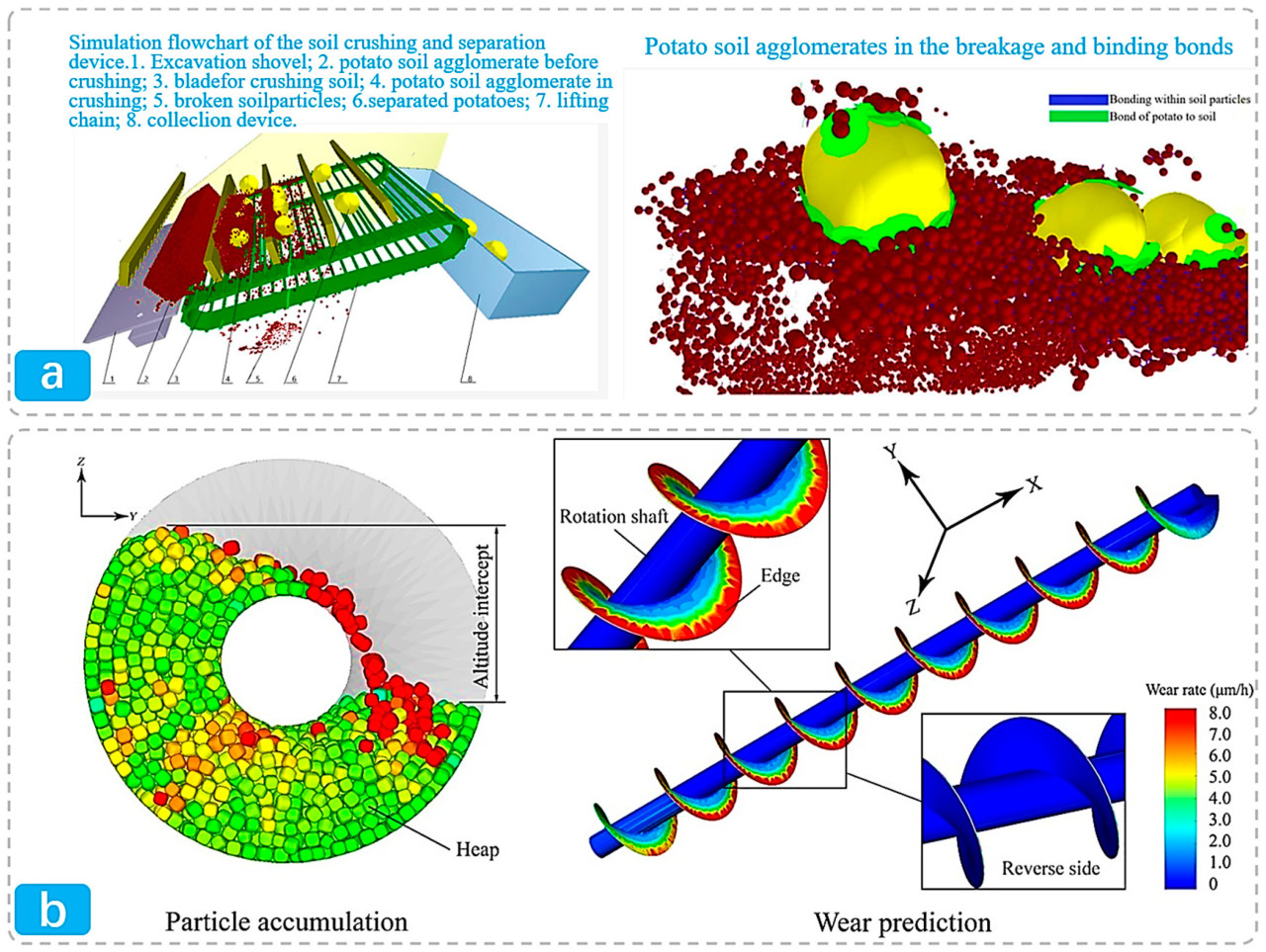
Рисунок 9. (a) Дискретный мета-анализ процесса сепарации картофеля от почвы [113]. (b) Дискретный мета-анализ процесса транспортировки несферических частиц с помощью винтового конвейерного механизма [118].
4.4. Моделирование процесса сбора
Процесс сбора обычно разрабатывается для удобства транспортных средств. Существуют три основные технологии. Первая — технология сбора картофеля, включающая технологию сборного бункера для картофеля с адаптивной высотой и технологию погрузки картофеля с автоматическим подъемным рычажным конвейером. Технология сборного бункера с адаптивной высотой может автоматически регулировать высоту падения картофеля, уменьшая повреждения, вызванные соударением клубней картофеля с корпусом бункера, когда они полностью попадают в отделенный бункер из-за чрезмерной высоты падения. Вторая — технология погрузки картофеля с автоматическим подъемным рычажным конвейером. Эта технология оснащает конец подъемного рычага датчиками расстояния, такими как ультразвуковые датчики. Регулировка гидроцилиндра изменяет угол наклона конца подъемного рычага и расстояние между подъемным рычагом и транспортным средством для сброса картофеля. Скорость подъемного рычажного конвейера может регулироваться в зависимости от количества картофеля. Эта технология была внедрена для моделей уборки картофеля в нескольких странах. Третья — технология человеко-машинного взаимодействия, которая требует мониторинга в реальном времени состояния движения машины, состояния копания, состояния транспортировки и сепарации, эффективности удаления примесей и вместимости бункера. Эта технология интегрирует механические, электрические, гидравлические и приборные технологии и оснащена терминальной системой человеко-машинного взаимодействия в кабине на основе технологий PDA/GPS/GPRS/GIS. Дай и др. [123] провели имитационное исследование двухфазного течения твердое тело-жидкость в процессе гидравлического сбора на основе DEM-CFD, а затем подтвердили правильность численного моделирования экспериментами. Чжан и др. [124] выполнили численное моделирование процесса сбора сульфидированных минералов с использованием технологии связи DEM-CFD. Они обнаружили, что когда подъем попадает в эффективную зону действия всасывания отрицательного давления сборной жесткой трубы, частицы подвергаются связанному воздействию вихревого потока и потока всасывания отрицательного давления и в конечном итоге транспортируются внутрь сборной жесткой трубы. Хоу и др. [125] разработали дискретную модель элементов для трехкамерного разделения и измельчения клещевины, чтобы проанализировать повреждение клещевины при механизированной уборке. Модуль упругости был измерен с помощью анализатора физических свойств пищевых продуктов TMS pro. Контактные параметры были откалиброваны по углу естественного откоса. Результаты показали, что максимальное разрушающее усилие составило 52,65 Н. Дизайн поверхности отклика Бокса-Бенкена позволил получить оптимальные параметры связывания: нормальная жесткость на единицу площади составила 9,47 × 10^7 Н/м3, жесткость на сдвиг на единицу площади — 4,59 × 10^7 Н/м3, нормальная прочность — 7,92 × 10^3 Па, а прочность на сдвиг — 1,13 × 10^4 Па. Это исследование обеспечивает поддержку параметров дискретного элементного моделирования для анализа механизма повреждения сельскохозяйственных культур в процессе механизированного сбора.
Таким образом, из-за относительно меньшего повреждения и ушибов картофеля в процессе сбора исследователи уделяли меньше внимания изучению сбора картофеля и больше сосредотачивались на процессах копания и сепарации почвы при уборке картофеля. Чтобы уменьшить вторичное повреждение картофеля в процессах сбора и транспортировки, рекомендуется проводить исследования движения, соударения и трения между картофелинами.
5. Заключение и перспективы
С развитием компьютерного программного и аппаратного обеспечения МДЭ нашел широкое применение в области сельскохозяйственной техники, особенно при проектировании сельскохозяйственных машин. Однако проектирование сельскохозяйственной техники — это процесс, требующий глубоких знаний. В настоящее время исследователи используют технологии численного моделирования с помощью программного обеспечения для численного анализа и расчета, такого как EDEM, FLUENT и ANSYS, для проведения конечно-элементного анализа и дискретного элементного анализа конструкции и работы сельскохозяйственной техники. Этот подход снижает стоимость и цикл проектирования сельскохозяйственной техники, максимально повышает эффективность проектирования и обогащает концепции дизайна. Хотя МДЭ продемонстрировал превосходные проектные характеристики при проектировании сельскохозяйственной техники, метод дискретных элементов все еще сталкивается с некоторыми проблемами и вызовами в реальном процессе проектирования.
— Ограниченная точность модели: Хотя МДЭ имеет определенные преимущества при моделировании взаимодействий между сыпучими материалами и объектами, физические свойства таких материалов, как картофель и почва, в практических приложениях очень сложны, что делает точное моделирование сложной задачей. Например, картофель имеет неправильную форму и различные размеры, в то время как структура и механические свойства почвы могут значительно различаться в разных регионах и условиях. Текущие модели часто с трудом полностью и точно представляют эти реальные сценарии, что может привести к расхождениям между результатами моделирования и фактическими результатами.
— Трудности калибровки параметров: Точность дискретных элементных моделей в значительной степени зависит от точности параметров модели, таких как коэффициент трения между частицами, модуль упругости и коэффициент восстановления. Однако точное определение и калибровка этих параметров могут быть сложными, требуя обширных экспериментальных и эмпирических данных. Более того, значения параметров могут меняться в зависимости от различных материалов и условий, что увеличивает неопределенность и погрешность модели.
— Высокая вычислительная стоимость: Объем вычислений метода дискретных элементов резко возрастает по мере увеличения сложности моделирования, например, при рассмотрении большего количества частиц, более сложных механических структур и процессов движения. Требования к компьютерному оборудованию и времени вычислений также резко возрастают, что в определенной степени ограничивает его применение в крупномасштабных, сложных системах и быстрой оптимизации конструкции в реальной инженерной практике.
— Недостаточная обработка задач мультифизического связывания: Процесс уборки картофеля включает не только механические взаимодействия между частицами, но также может включать проблемы мультифизического связывания, такие как миграция почвенной влаги и теплопередача. В настоящее время метод дискретных элементов имеет определенные ограничения при решении этих задач мультифизического связывания, и трудно полностью и точно моделировать различные физические явления и взаимодействия, происходящие в реальном процессе уборки.
— Недостаток систематических исследований: В настоящее время применение метода дискретных элементов (МДЭ) в исследованиях картофелеуборочной техники в основном сосредоточено на конкретных компонентах или процессах, таких как оптимизация выкапывающего лемеха или сепарирующего грохота, и отсутствуют систематические исследования и комплексная оптимизация всей системы уборочной техники. Однако картофелеуборочная техника представляет собой сложную систему, где различные компоненты взаимосвязаны и влияют друг на друга. Для достижения оптимальных результатов уборки необходим целостный и скоординированный подход к оптимизации.
Применение метода дискретных элементов (МДЭ) в картофелеуборочной технике обеспечивает значительные экономические и экологические преимущества для картофельной отрасли. Оптимизируя конструкцию машин и рабочие параметры с помощью моделирования МДЭ, уборочные операции могут стать более эффективными, сокращая рабочее время, затраты на оплату труда и расход топлива. Точное моделирование может помочь оптимизировать ключевые процессы, такие как сепарация картофеля от почвы, минимизируя повреждения и потери клубней, тем самым повышая качество уборки и увеличивая фактический доход фермеров. Использование МДЭ для виртуальных испытаний и оптимизации может сократить количество реальных полевых испытаний, сократить цикл исследований и разработок, а также снизить затраты и риски на НИОКР. Точный контроль глубины копания и усилия может минимизировать повреждение структуры почвы и уменьшить эрозию и уплотнение почвы. Повышенная эффективность оптимизированной техники приводит к снижению энергопотребления, что, в свою очередь, уменьшает выбросы выхлопных газов и другие загрязнители окружающей среды. В целом, МДЭ широко и успешно применяется в области сельскохозяйственной техники, но аспект исследований моделирования частиц почвы с помощью МДЭ все еще сталкивается с большими проблемами и имеет большие исследовательские перспективы, такие как моделирование частиц почвы и калибровка параметров частиц, моделирование потерь частиц и калибровка параметров между частицами почвы, которые все еще требуют углубленного изучения.
Ссылки
1. Han, X.; Yang, R.; Zhang, L.; Wei, Q.; Zhang, Y.; Wang, Y.; Shi, Y. A Review of Potato Salt Tolerance. Int. J. Mol. Sci. 2023, 24, 10726. [Google Scholar] [CrossRef] [PubMed]
2. Lindqvist-Kreuze, H.; Bonierbale, M.; Gruneberg, W.J.; Mendes, T.; De Boeck, B.; Campos, H. Potato and sweetpotato breeding at the international potato center: Approaches, outcomes and the way forward. Theor. Appl. Genet. 2024, 137, 12. [Google Scholar] [CrossRef] [PubMed]
3. Boivin, M.; Bourdeau, N.; Barnabe, S.; Desgagne-Penix, I. Sprout Suppressive Molecules Effective on Potato (Solanum tuberosum) Tubers during Storage: A Review. Am. J. Potato Res. 2020, 97, 451–463. [Google Scholar] [CrossRef]
4. Jennings, S.A.; Koehler, A.-K.; Nicklin, K.J.; Deva, C.; Sait, S.M.; Challinor, A.J. Global Potato Yields Increase Under Climate Change with Adaptation and CO2 Fertilisation. Front. Sustain. Food Syst. 2020, 4, 519324. [Google Scholar] [CrossRef]
5. Zhang, H.; Xu, F.; Wu, Y.; Hu, H.; Dai, X. Progress of potato staple food research and industry development in China. J. Integr. Agric. 2017, 16, 2924–2932. [Google Scholar] [CrossRef]
6. Dupuis, B.; Nkuriyingoma, P.; Ballmer, T. Economic Impact of Potato Virus Y (PVY) in Europe. Potato Res. 2024, 67, 55–72. [Google Scholar] [CrossRef]
7. Raymundo, R.; Asseng, S.; Robertson, R.; Petsakos, A.; Hoogenboom, G.; Quiroz, R.; Hareau, G.; Wolf, J. Climate change impact on global potato production. Eur. J. Agron. 2018, 100, 87–98. [Google Scholar] [CrossRef]
8. Ojeda, J.J.; Rezaei, E.E.; Kamali, B.; McPhee, J.J.; Meinke, H.; Siebert, S.; Webb, M.A.; Ara, I.; Mulcahy, F.; Ewert, F. Impact of crop management and environment on the spatio-temporal variance of potato yield at regional scale. Field Crops Res. 2021, 270, 108213. [Google Scholar] [CrossRef]
9. Adekanmbi, T.; Wang, X.; Basheer, S.; Liu, S.; Yang, A.; Cheng, H. Climate change impacts on global potato yields: A review. Environ. Res. Clim. 2023, 3, 012001. [Google Scholar] [CrossRef]
10. Johnson, C.M.; Auat Cheein, F. Machinery for potato harvesting: A state-of-the-art review. Front. Plant Sci. 2023, 14, 1156734. [Google Scholar] [CrossRef]
11. Wang, L.; Liu, F.; Wang, Q.; Zhou, J.; Fan, X.; Li, J.; Zhao, X.; Xie, S. Design of a Spring-Finger Potato Picker and an Experimental Study of Its Picking Performance. Agriculture 2023, 13, 945. [Google Scholar] [CrossRef]
12. Wei, Z.; Li, H.; Sun, C.; Su, G.; Liu, W.; Li, X. Experiments and Analysis of a Conveying Device for Soil Separation and Clod-Crushing for a Potato Harvester. Appl. Eng. Agric. 2019, 35, 987–996. [Google Scholar] [CrossRef]
13. Wang, H.; Zhao, W.; Sun, W.; Liu, X.; Shi, R.; Zhang, H.; Chen, P.; Gao, K. The Design and Experimentation of a Wheeled-Chassis Potato Combine Harvester with Integrated Bagging and Ton Bag-Lifting Systems. Agriculture 2024, 14, 1461. [Google Scholar] [CrossRef]
14. Lu, K.; Xie, S.; Gai, X.; Ji, X. Design and Experiment of Toggle Lever-Type Potato Picker. Agriculture 2024, 14, 826. [Google Scholar] [CrossRef]
15. Chen, Y.; Wang, Z.; Zhang, H.; Liu, X.; Li, H.; Sun, W.; Li, H. Investigation of the Traveling Performance of the Tracked Chassis of a Potato Combine Harvester in Hilly and Mountainous Areas. Agriculture 2024, 14, 1625. [Google Scholar] [CrossRef]
16. Chen, K.J.; Wood, J.D.; Mohammed, I.K.; Echendu, S.; Jones, D.; Northam, K.; Charalambides, M.N. Mechanical Characterisation and modelling of the rolling process of potato-based dough. J. Food Eng. 2020, 278, 109943. [Google Scholar] [CrossRef]
17. Lenartowicz, T.; Piepho, H.P.; Przystalski, M. Stability Analysis of Tuber Yield and Starch Yield in Mid-Late and Late Maturing Starch Cultivars of Potato (Solanum tuberosum). Potato Res. 2019, 63, 179–197. [Google Scholar] [CrossRef]
18. Jaiswal, A.K.; Singh, B.; Mehta, A.; Lal, M. Post-Harvest Losses in Potatoes from Farm to Fork. Potato Res. 2023, 66, 51–66. [Google Scholar] [CrossRef]
19. Ping, Z.; Guo, R.; Jin, T.; Zhang, G.; Ning, X. Collision simulation of potato tubers for mechanized harvesting. J. Food Process Eng. 2023, 46, e14278. [Google Scholar] [CrossRef]
20. Visse-Mansiaux, M.; Tallant, M.; Brostaux, Y.; Delaplace, P.; Vanderschuren, H.; Dupuis, B. Assessment of pre- and post-harvest anti-sprouting treatments to replace CIPC for potato storage. Postharvest Biol. Technol. 2021, 178, 111540. [Google Scholar] [CrossRef]
21. Zhang, Q.; Zhang, Z.; Li, C.; Xu, R.; Yang, D.; Sun, L. Van der Waals materials-based floating gate memory for neuromorphic computing. Chip 2023, 2, 100059. [Google Scholar] [CrossRef]
22. Deng, X.; Kang, N.; Zhang, Z. Carbon-Based Cryoelectronics: Graphene and Carbon Nanotube. Chip 2023, 22, 100064. [Google Scholar] [CrossRef]
23. Kim, J.; Jeon, B. “Digital design” and three flows of ideas. J. Asian Archit. Build. Eng. 2022, 21, 1891–1907. [Google Scholar] [CrossRef]
24. Han, J.S.; Kim, G. Virtual Constructions Design using 3ds Max. J. Digit. Converg. 2013, 11, 273–278. [Google Scholar]
25. Li, C.; Luo, Y.; Li, W.; Yang, B.; Sun, C.; Ma, W.; Ma, Z.; Wei, Y.; Li, X.; Yang, J. The On-chip Thermoelectric Cooler: Advances, Applications and Challenges. Chip 2024, 3, 100096. [Google Scholar] [CrossRef]
26. Gazquez, J.A.; Castellano, N.N.; Manzano-Agugliaro, F. Intelligent low cost telecontrol system for agricultural vehicles in harmful environments. J. Clean. Prod. 2016, 113, 204–215. [Google Scholar] [CrossRef]
27. Guo, Q.; Xia, H. A review of the Discrete Element Method/Modelling (DEM) in agricultural engineering. J. Agric. Eng. 2023, 54. [Google Scholar] [CrossRef]
28. Xin, C.; Yin, Y.; Song, B.; Fan, Z.; Song, Y.; Pan, F. Machine Learning-Accelerated Discovery of Novel 2D Ferromagnetic Materials with Strong Magnetization. Chip 2023, 2, 100071. [Google Scholar] [CrossRef]
29. Yang, K.-S.; He, C.; Fang, J.; Cui, X.; Sun, H.; Yang, Y.; Zuo, C. Advanced RF filters for wireless communications. Chip 2023, 2, 100058. [Google Scholar] [CrossRef]
30. Hao, Z.; Zou, K.; Meng, Y.; Yan, J.-Y.; Li, F.; Huo, Y.; Jin, C.-Y.; Liu, F.; Descamps, T.; Iovan, A.; et al. High-performance eight-channel system with fractal superconducting nanowire single-photon detectors. Chip 2024, 3, 100087. [Google Scholar] [CrossRef]
31. Siegmann, E.; Enzinger, S.; Toson, P.; Doshi, P.; Khinast, J.; Jajcevic, D. Massively speeding up DEM simulations of continuous processes using a DEM extrapolation. Powder Technol. 2021, 390, 442–455. [Google Scholar] [CrossRef]
32. Qi, L.; Chen, Y.; Sadek, M. Simulations of soil flow properties using the discrete element method (DEM). Comput. Electron. Agric. 2019, 157, 254–260. [Google Scholar] [CrossRef]
33. Gong, H.; Chen, Y.; Wu, S.; Tang, Z.; Liu, C.; Wang, Z.; Fu, D.; Zhou, Y.; Qi, L. Simulation of canola seedling emergence dynamics under different soil compaction levels using the discrete element method (DEM). Soil Tillage Res. 2022, 223, 105461. [Google Scholar] [CrossRef]
34. Zhao, H.; Huang, Y.; Liu, Z.; Liu, W.; Zheng, Z. Applications of Discrete Element Method in the Research of Agricultural Machinery: A Review. Agriculture 2021, 11, 425. [Google Scholar] [CrossRef]
35. Du, B.; Zhao, C.; Dong, G.; Bi, J. FEM-DEM coupling analysis for solid granule medium forming new technology. J. Mater. Process. Technol. 2017, 249, 108–117. [Google Scholar] [CrossRef]
36. Horabik, J.; Molenda, M. Parameters and contact models for DEM simulations of agricultural granular materials: A review. Biosyst. Eng. 2016, 147, 206–225. [Google Scholar] [CrossRef]
37. Huang, L.; He, R.; Yang, Z.; Tan, P.; Chen, W.; Li, X.; Cao, A. Exploring hydraulic fracture behavior in glutenite formation with strong heterogeneity and variable lithology based on DEM simulation. Eng. Fract. Mech. 2023, 278, 109020. [Google Scholar] [CrossRef]
38. Wang, P.; Yin, Z.-Y.; Hicher, P.-Y.; Cui, Y.-J. Micro-mechanical analysis of one-dimensional compression of clay with DEM. Int. J. Numer. Anal. Methods Geomech. 2023, 47, 2706–2724. [Google Scholar] [CrossRef]
39. Zhong, W.; Yu, A.; Liu, X.; Tong, Z.; Zhang, H. DEM/CFD-DEM Modelling of Non-spherical Particulate Systems: Theoretical Developments and Applications. Powder Technol. 2016, 302, 108–152. [Google Scholar] [CrossRef]
40. Cundall, P.A. The Measurement and Analysis of Accelerations in Rock Slopes. Ph.D. Thesis, Imperial College, London, UK, 1971. [Google Scholar]
41. Cundall, P.A. A computer model for simulating progressive, large-scale movements in blocky rock systems. Proc. Int. Symp. Rock Mech. 1971, 8, 129–136. [Google Scholar]
42. Martinez Morillo, G.C.; Bandeira, A.A. Discrete Element Method applied to the simulation of the stress state in granular materials. Soil Res. 2019, 57, 85–100. [Google Scholar] [CrossRef]
43. Meng, J.; Huang, J.; Li, H.; Laue, J.; Li, K. A static discrete element method with discontinuous deformation analysis. Int. J. Numer. Methods Eng. 2019, 120, 918–935. [Google Scholar] [CrossRef]
44. Fleissner, F.; Gaugele, T.; Eberhard, P. Applications of the discrete element method in mechanical engineering. Multibody Syst. Dyn. 2007, 18, 81–94. [Google Scholar] [CrossRef]
45. Tsunazawa, Y.; Soma, N.; Iijima, M.; Tatami, J.; Mori, T.; Sakai, M. Validation study on a coarse-grained DEM-CFD simulation in a bead mill. Powder Technol. 2024, 440, 119743. [Google Scholar] [CrossRef]
46. Napolitano, E.; Di Renzo, A.; Di Maio, F.P. Coarse-grain DEM-CFD modelling of dense particle flow in gas-solid cyclone. Sep. Purif. Technol. 2022, 287, 120591. [Google Scholar] [CrossRef]
47. Mudarisov, S.; Farkhutdinov, I.; Khamaletdinov, R.; Khasanov, E.; Mukhametdinov, A. Evaluation of the significance of the contact model particle parameters in the modelling of wet soils by the discrete element method. Soil Tillage Res. 2022, 215, 105228. [Google Scholar] [CrossRef]
48. Li, J.; Qiao, T.; Ji, S. General polygon mesh discrete element method for arbitrarily shaped particles and complex structures based on an energy-conserving contact model. Acta Mech. Sin. 2023, 39, 722245. [Google Scholar] [CrossRef]
49. Xue, B.; Que, Y.; Pei, J.; Ma, X.; Wang, D.; Yuan, Y.; Zhang, H. A state-of-the-art review of discrete element method for asphalt mixtures: Model generation methods, contact constitutive models and application directions. Constr. Build. Mater. 2024, 414, 134842. [Google Scholar] [CrossRef]
50. Tykhoniuk, R.; Tomas, J.; Luding, S.; Kappl, M.; Heim, L.; Butt, H.-J. Ultrafine cohesive powders: From interparticle contacts to continuum behaviour. Chem. Eng. Sci. 2007, 62, 2843–2864. [Google Scholar] [CrossRef]
51. He, H.; Zheng, J.; Chen, Y.; Ning, Y. Physics engine based simulation of shear behavior of granular soils using hard and soft contact models. J. Comput. Sci. 2021, 56, 101504. [Google Scholar] [CrossRef]
52. Wong, C.P.Y.; Coop, M.R. The contact mechanics of a UK railway ballast. Géotechnique 2023, 74, 1700–1712. [Google Scholar] [CrossRef]
53. Jamshidi, H.; Ahmadian, H. A modified rough interface model considering shear and normal elastic deformation couplings. Int. J. Solids Struct. 2020, 203, 57–72. [Google Scholar] [CrossRef]
54. Gao, W.; Feng, Y.T.; Wang, C. A coupled isogeometric/multi-sphere discrete element approach for the contact interaction between irregular particles and structures. Powder Technol. 2023, 430, 118971. [Google Scholar] [CrossRef]
55. Chen, G.; Schott, D.L.; Lodewijks, G. Sensitivity analysis of DEM prediction for sliding wear by single iron ore particle. Eng. Comput. 2017, 34, 2031–2053. [Google Scholar] [CrossRef]
56. Li, X.; Du, Y.; Liu, L.; Mao, E.; Yang, F.; Wu, J.; Wang, L. Research on the constitutive model of low-damage corn threshing based on DEM. Comput. Electron. Agric. 2022, 194, 106722. [Google Scholar] [CrossRef]
57. Ghodki, B.M.; Kumar, K.; Goswami, T.K. Modeling breakage and motion of black pepper seeds in cryogenic mill. Adv. Powder Technol. 2018, 29, 1055–1071. [Google Scholar] [CrossRef]
58. Shi, Y.; Jiang, Y.; Wang, X.; Thuy, N.T.D.; Yu, H. A mechanical model of single wheat straw with failure characteristics based on discrete element method. Biosyst. Eng. 2023, 230, 1–15. [Google Scholar] [CrossRef]
59. Aleshin, V.; Van Den Abeele, K. Preisach analysis of the Hertz-Mindlin system. J. Mech. Phys. Solids 2009, 57, 657–672. [Google Scholar] [CrossRef]
60. Ahmad, F.; Qiu, B.; Ding, Q.; Ding, W.; Khan, Z.M.; Shoaib, M.; Chandio, F.A.; Rahim, A.; Khaliq, A. Discrete element method simulation of disc type furrow openers in paddy soil. Int. J. Agric. Biol. Eng. 2020, 13, 103–110. [Google Scholar] [CrossRef]
61. Wang, Z.; Li, J.; Yu, T.; Cheng, Q.; Li, F.; Li, Z. Sampling dynamic analysis and discrete element simulation on a deep layer regolith drill for extraterrestrial celestial bodies. Acta Astronaut. 2024, 225, 141–157. [Google Scholar] [CrossRef]
62. Shi, J.; Shan, Z.; Yang, H. Research on the macro- and meso-mechanical properties of frozen sand mold based on Hertz-Mindlin with Bonding model. Particuology 2024, 88, 176–191. [Google Scholar] [CrossRef]
63. Liu, X.; Gui, N.; Yang, X.; Tu, J.; Jiang, S. A DEM-embedded finite element method for simulation of the transient heat conduction process in the pebble bed. Powder Technol. 2021, 377, 607–620. [Google Scholar] [CrossRef]
64. Gui, N.; Yan, J.; Xu, W.; Ge, L.; Wu, D.; Ji, Z.; Gao, J.; Jiang, S.; Yang, X. DEM simulation and analysis of particle mixing and heat conduction in a rotating drum. Chem. Eng. Sci. 2013, 97, 225–234. [Google Scholar] [CrossRef]
65. Oschmann, T.; Kruggel-Emden, H. A novel method for the calculation of particle heat conduction and resolved 3D wall heat transfer for the CFD/DEM approach. Powder Technol. 2018, 338, 289–303. [Google Scholar] [CrossRef]
66. Wu, Z.; Zhou, Y.; Fan, L. A fracture aperture dependent thermal-cohesive coupled model for modelling thermal conduction in fractured rock mass. Comput. Geotech. 2019, 114, 103108. [Google Scholar] [CrossRef]
67. Mukherjee, R.; Sansare, S.; Nagarajan, V.; Chaudhuri, B. Discrete Element Modeling (DEM) based investigation of tribocharging in the pharmaceutical powders during hopper discharge. Int. J. Pharm. 2021, 596, 120284. [Google Scholar] [CrossRef]
68. Zhang, T.; Lu, Y. A method to deal with constant wall flux boundary condition in a fluidized bed by CFD-DEM. Chem. Eng. J. 2021, 406, 126880. [Google Scholar] [CrossRef]
69. Jiang, S.; Wan, H.; Cao, G.; Tan, Y.; Liu, J.; Yang, S.; Xiao, X.; Tong, Z.; Yu, Q.B. Optimization of the Stirring Blade Structure of the Pumping Unit Based on the Improvement of Concrete Suction Efficiency. Adv. Civ. Eng. 2022, 2022, 1255348. [Google Scholar] [CrossRef]
70. Ouyang, Y.; Yang, Q.; Chen, X. Bonded-Particle Model with Nonlinear Elastic Tensile Stiffness for Rock-Like Materials. Appl. Sci. 2017, 7, 686. [Google Scholar] [CrossRef]
71. Caserta, A.J.; Navarro, H.A.; Cabezas-Gómez, L. Damping coefficient and contact duration relations for continuous nonlinear spring-dashpot contact model in DEM. Powder Technol. 2016, 302, 462–479. [Google Scholar] [CrossRef]
72. Wojtkowski, M.B.; Pecen, J.; Horabik, J.; Molenda, M. Rapeseed impact against a flat surface: Physical testing and DEM simulation with two contact models. Powder Technol. 2010, 198, 61–68. [Google Scholar] [CrossRef]
73. Burns, S.J.; Hanley, K.J. Establishing stable time-steps for DEM simulations of non-collinear planar collisions with linear contact laws. Int. J. Numer. Methods Eng. 2017, 110, 186–200. [Google Scholar] [CrossRef]
74. Wang, C.; Liu, G.; Zhai, Z.; Guo, X.Y.; Wu, Y. CFD-DEM study on the interaction between triboelectric charging and fluidization of particles in gas-solid fluidized beds. Powder Technol. 2023, 419, 118340. [Google Scholar] [CrossRef]
75. Pei, C.; Wu, C.-Y.; England, D.; Byard, S.J.; Berchtold, H.; Adams, M.J. Numerical analysis of contact electrification using DEM-CFD. Powder Technol. 2013, 248, 34–43. [Google Scholar] [CrossRef]
76. Rasera, J.N.; Cruise, R.D.; Cilliers, J.J.; Lamamy, J.; Hadler, K. Modelling the tribocharging process in 2D and 3D. Powder Technol. 2022, 407, 117607. [Google Scholar] [CrossRef]
77. Yang, X. Design and experimental study of potato harvester in hilly and mountainous areas. INMATEH Agric. Eng. 2021, 64, 151–158. [Google Scholar] [CrossRef]
78. Mino, Z. 1700/1710 potato combine harvester. Mod. Agric. Machinery 2012, 40. Available online: https://www.nongjitong.com/product/maen_1710b_potato_harvester.html (accessed on 23 January 2025).
79. No.8 2014 Model Guide. Farm Machinery 2014, 63–70. Available online: https://kns.cnki.net/kcms2/article/abstract?v=OJyTKzW6Fepy5vUkJVPEWtlQecCtHJ-H7mS1OxQu6L29hKanbBbDnWeTOMYGjn8i_WFd56B7n-0aooK4QdYZ3ADXZXBmzTDXZYrmFMcEOZPUfsKmK8ieR6eYbnH1QNnFHkP899WFWOz_Tg_2ITXH_y-zYJ4IiwQqi0LQ-0pZKi7_uL2SJ9_EN_wNPqOVLeuc&uniplatform=NZKPT&language=CHS (accessed on 23 January 2025).
80. Hongzhu 4U-170 potato harvester. Farmers Get Rich 2015, 27. Available online: https://www.nongjitong.com/product/qdhongzhu_4u-170_potato_harvester.html (accessed on 23 January 2025).
81. Wei, H.; Zhang, J.; Yang, X.; Huang, X.; Dai, L.; Sun, G.; Liu, X. Improved design and experiment of 4UFD-1400 potato combine harvester. Trans. Chin. Soc. Agric. Eng. 2014, 30, 12–17. [Google Scholar]
82. Zhao, M. Design of Crawler Self-Propelled Potato Harvester. Master’s Thesis, Ningxia University, Ningxia, China, 2023. [Google Scholar] [CrossRef]
83. Wang, H. Design and experiment of mountain self-propelled potato combine harvester. Master’s Thesis, Kunming University of Science and Technology, Kunming, China, 2021. [Google Scholar] [CrossRef]
84. Wang, H.; Zhao, W.; Sun, W.; Zhang, H.; Liu, X.; Li, H. Research progress on potato mechanized harvesting technology and equipment. Trans. Chin. Soc. Agric. Eng. 2023, 39, 1–22. [Google Scholar]
85. Shi, M.; Wei, H.; Hu, Z.; Liu, X.; Yang, X. Investigation on the current situation of potato harvesting machinery products at home and abroad. Farm Mach. 2019, 40, 206–210. [Google Scholar]
86. Zhao, Z.; Wu, M.; Jiang, X. A Review of Contact Models’ Properties for Discrete Element Simulation in Agricultural Engineering. Agriculture 2024, 14, 238. [Google Scholar] [CrossRef]
87. Kim, Y.-S.; Siddique, M.A.A.; Kim, W.-S.; Kim, Y.-J.; Lee, S.-D.; Lee, D.-K.; Hwang, S.-J.; Nam, J.-S.; Park, S.-U.; Lim, R.-G. DEM simulation for draft force prediction of moldboard plow according to the tillage depth in cohesive soil. Comput. Electron. Agric. 2021, 189, 106368. [Google Scholar] [CrossRef]
88. Pasha, M.; Hare, C.; Ghadiri, M.; Gunadi, A.; Piccione, P.M. Inter-particle coating variability in a rotary batch seed coater. Chem. Eng. Res. Des. 2017, 120, 92–101. [Google Scholar]
89. Ren, D.; Yu, H.; Zhang, R.; Li, J.; Zhao, Y.; Liu, F.; Zhang, J.; Wang, W. Research and Experiments of Hazelnut Harvesting Machine Based on CFD-DEM Analysis. Agriculture 2022, 12, 2115. [Google Scholar] [CrossRef]
90. Capdeville, P.J.; Kuang, S.; Yu, A. Unrevealing energy dissipation during iron ore transfer through chutes with different designs. Powder Technol. 2024, 435, 119446. [Google Scholar] [CrossRef]
91. Tong, J.; Mohammad, M.; Zhang, J.; Ma, Y.; Rong, B.; Chen, D.; Menon, C. DEM Numerical Simulation of Abrasive Wear Characteristics of a Bioinspired Ridged Surface. J. Bionic Eng. 2010, 7, 175–181. [Google Scholar] [CrossRef]
92. Zidek, M.; Zegzulka, J.; Jezerská, L.; Rozbroj, J.; Gelnar, D.; Nečas, J. Simulation model of loading bin bottom by bulk material. Chem. Eng. Res. Des. 2020, 154, 151–161. [Google Scholar] [CrossRef]
93. Kesner, A.L.; Chotěborský, R.; Linda, M.; Hromasová, M.; Katinas, E.; Sutanto, H. Stress distribution on a soil tillage machine frame segment with a chisel shank simulated using discrete element and finite element methods and validate by experiment. Biosyst. Eng. 2021, 209, 125–138. [Google Scholar] [CrossRef]
94. Aikins, K.A.; Ucgul, M.; Barr, J.B.; Awuah, E.; Antille, D.L.; Jensen, T.A.; Desbiolles, J.M.A. Review of Discrete Element Method Simulations of Soil Tillage and Furrow Opening. Agriculture 2023, 13, 541. [Google Scholar] [CrossRef]
95. Li, H.; Gao, F. Improvement design of separation and conveying machinery and equipment of potato excavator in heavy soil. Phys. Chem. Earth Parts A/B/C. 2023, 130, 103363. [Google Scholar] [CrossRef]
96. Li, J.; Jiang, X.; Ma, Y.; Tong, J.; Hu, B. Bionic Design of a Potato Digging Shovel with Drag Reduction Based on the Discrete Element Method (DEM) in Clay Soil. Appl. Sci. 2020, 10, 7096. [Google Scholar] [CrossRef]
97. Li, J.; Li, X.; Hu, B.; Gu, T.; Wang, Z.; Wang, H. Analysis of the resistance reduction mechanism of potato bionic digging shovels in clay and heavy soil conditions. Comput. Electron. Agric. 2023, 214, 108315. [Google Scholar] [CrossRef]
98. Gai, X.; Xie, S.; Deng, W.; Lu, K.; Ji, X. Construction and parameter calibration of potato double-layer flexible bonding model based on discrete-element method. J. Food Process Eng. 2024, 47, e14602. [Google Scholar] [CrossRef]
99. Liang, Z.; Huang, Y.; Li, D.; Wada, M.E. Parameter determination of a viscoelastic–plastic contact model for potatoes during transient collisions. Biosyst. Eng. 2023, 234, 156–171. [Google Scholar] [CrossRef]
100. Ye, F.; Lu, T.; Xu, C. Digging characteristics of grab based on DEM-MBD simulation and experiment. Comput. Part. Mech. 2024. [Google Scholar] [CrossRef]
101. Chen, M.; Liu, X.; Hu, P.; Zhai, X.; Han, Z.; Shi, Y.; Zhu, W.; Wang, D.; He, X.; Shang, S. Study on rotor vibration potato-soil separation device for potato harvester using DEM-MBD coupling simulation. Comput. Electron. Agric. 2024, 218, 108638. [Google Scholar] [CrossRef]
102. Xie, S.; Zhang, Y.; Li, J.; Liu, F. Analysis of Breaking and Separating Characteristics of Potato-Soil Aggregates Based on the New Type of Swing Separation Sieve. Agronomy 2024, 14, 1272. [Google Scholar] [CrossRef]
103. McRae, D.C. Improving the Quality of the Potato Crop. Outlook Agric. 1990, 19, 237–242. [Google Scholar] [CrossRef]
104. Xie, S.; Wang, C.; Deng, W. Experimental study on collision acceleration and damage characteristics of potato. J. Food Process Eng. 2020, 43, e13457. [Google Scholar] [CrossRef]
105. Shang, Z.; Wang, F.; Xie, S.; Deng, W.; Li, J.; Guo, Y.; Lu, K.; Gai, X.; Ji, X. Construction and analysis of the forced vibration model of separating screen under a dropped potato. J. Food Process Eng. 2023, 46, e14346. [Google Scholar] [CrossRef]
106. Deng, W.; Wang, C.; Xie, S. Collision simulation of potato on rod separator. Int. J. Food Eng. 2020, 17, 435–444. [Google Scholar] [CrossRef]
107. Dorokhov, A.; Didmanidze, O.; Aksenov, A.; Sibirev, A.; Sazonov, N.; Mosyakov, M.; Godyaeva, M. The Results of Studies on the Assessment of the Destruction of Soil Clods during Combine Harvesting of Potatoes. Agriculture 2022, 12, 2024. [Google Scholar] [CrossRef]
108. Milne, F.N.J. The Canon of Potato Science: 34. Potato Harvesting. Potato Res. 2007, 50, 347–349. [Google Scholar] [CrossRef]
109. Dorokhov, A.; Ponomarev, A.; Zernov, V.; Petukhov, S.; Aksenov, A.; Sibirev, A.; Sazonov, N.; Godyaeva, M. The Results of Laboratory Studies of the Device for Evaluation of Suitability of Potato Tubers for Mechanized Harvesting. Appl. Sci. 2022, 12, 2171. [Google Scholar] [CrossRef]
110. Li, Y.; Fan, J.; Hu, Z.; Luo, W.; Yang, H.; Shi, L.; Wu, F. Calibration of Discrete Element Model Parameters of Soil around Tubers during Potato Harvesting Period. Agriculture 2022, 12, 1475. [Google Scholar] [CrossRef]
111. Du, X.; Liu, J.; Zhao, Y.; Zhang, C.; Zhang, X.; Wang, Y. Design and Test of Discrete Element-Based Separation Roller Potato-Soil Separation Device. Agriculture 2024, 14, 1053. [Google Scholar] [CrossRef]
112. Li, Y.; Hu, Z.; Gu, F.; Wang, B.; Fan, J.; Yang, H.; Wu, F. DEM-MBD Coupling Simulation and Analysis of the Working Process of Soil and Tuber Separation of a Potato Combine Harvester. Agronomy 2022, 12, 1734. [Google Scholar] [CrossRef]
113. Yan, D.; Deng, W.; Xie, S.; Liu, C.; Ren, Z.; Zhao, H.; Cai, Y.; Zhao, Z. Discrete Element-Based Simulation Analysis and Research of Potato Soil Agglomerate Fragmentation and Separation. Appl. Sci. 2023, 13, 8416. [Google Scholar] [CrossRef]
114. Zhao, H.; Deng, W.; Xie, S.; Zhao, Z. Performance Optimization and Experimental Study of Small-Scale Potato-Grading Device. Agriculture 2024, 14, 822. [Google Scholar] [CrossRef]
115. Geng, J.; Wang, S.; Gao, Z.; Liu, Z.; Rao, X. Influence of initial orientations on potato conveyor trajectories by machine vision. Comput. Electron. Agric. 2019, 163, 104838. [Google Scholar] [CrossRef]
116. Xie, H.K.; Gao, G.; Tian, B.; Li, B.; Zhang, S.; Huang, J. Optimization of Potato Soil Transportation Separation Mechanism Based on Discrete Element Method and TRIZ Theory. J. Phys. Conf. Ser. 2019, 1267, 012071. [Google Scholar] [CrossRef]
117. Zhang, H.; Li, H.; Sun, W.; Li, H.; Liu, X.; Sun, G.; Lu, Y.; Chen, Y.; Xing, W. Optimization of Potato Planter Soil Lifting Device Based on TRIZ Theory. Agriculture 2024, 14, 1695. [Google Scholar] [CrossRef]
118. Sun, H.; Ma, H.; Zhao, Y. DEM investigation on conveying of non-spherical particles in a screw conveyor. Particuology 2022, 65, 17–31. [Google Scholar] [CrossRef]
119. McRae, D.C. A potato harvester delivery conveyor with automatic discharge height control. Potato Res. 1974, 17, 138–151. [Google Scholar] [CrossRef]
120. Torres-Serra, J.; Rodriguez-Ferran, A.; Romero, E. Study of grain-scale effects in bulk handling using discrete element simulations. Powder Technol. 2021, 382, 284–299. [Google Scholar] [CrossRef]
121. Ren, H.; Meng, W.; Sun, X.; Zhao, Z.; Zhao, X. Discrete element analysis on dynamic characteristics of directional material flow driven by horizontal trough-free screw conveyor. Powder Technol. 2023, 418, 118276. [Google Scholar] [CrossRef]
122. Shi, Q.; Sakai, M. Recent progress on the discrete element method simulations for powder transport systems: A review. Adv. Powder Technol. 2022, 33, 103664. [Google Scholar] [CrossRef]
123. Dai, H.; Li, Y. Research on the Collection Characteristics of a Hydraulic Collector for Seafloor Massive Sulfides. J. Mar. Sci. Eng. 2024, 12, 1534. [Google Scholar] [CrossRef]
124. Zhang, B.; Lu, H.; Yang, J.; Sun, P.; Deng, L. Numerical and experimental study on ore-collecting characteristics of deep-sea seafloor massive sulfide. Ocean Eng. 2024, 310, 118729. [Google Scholar] [CrossRef]
125. Hou, J.; Ren, Z.; Liu, D.; Ma, Z.Y.; Liu, X.; Wang, W. Parameter Calibration of a Discrete Element Model for Three-Compartment Separation and Fragmentation of Castor Capsules During Harvesting. J. Biosyst. Eng. 2023, 48, 198–214. [Google Scholar] [CrossRef]

Yue Y, Zhang Q, Dong B, Li J. Application of Discrete Element Method to Potato Harvesting Machinery: A Review. Agriculture. 2025; 15(3):315. https://doi.org/10.3390/agriculture15030315
Перевод статьи «Application of Discrete Element Method to Potato Harvesting Machinery: A Review» авторов Yue Y, Zhang Q, Dong B, Li J., оригинал доступен по ссылке. Лицензия: CC BY. Изменения: переведено на русский язык
Фото: freepik



















































































































Комментарии (0)