Два гербицида за один проход: как работает интеллектуальная система смешивания для кукурузы и сои
Полосное совместное возделывание кукурузы и сои позволяет максимально эффективно использовать земельные ресурсы, обеспечивает высокую общую урожайность и плодородие почвы, поэтому оно стало активно внедряемой современной агротехнической системой. Для решения проблемы сорняков в таком типе севооборота традиционные опрыскиватели с предварительным смешиванием не могут удовлетворить агротехническим требованиям, поэтому была разработана двухканальная система непосредственного впрыска со смешиванием в потоке для полосного возделывания кукурузы и сои.
Аннотация
Система была интегрирована для повышения удобства монтажа и универсальности, а также способна обеспечивать одновременное внесение двух типов пестицидов с различными коэффициентами смешивания. Система в основном состоит из модуля впрыска водного растворителя, модуля смешивания в потоке глифосата (гербицид для кукурузы) и модуля смешивания в потоке фомезофена (гербицид для сои). Сначала были изучены закономерности контроля коэффициента смешивания соответствующих пестицидов на основе принципа измерения электропроводности. Затем были экспериментально исследованы рабочие характеристики разработанной двухканальной системы непосредственного впрыска со смешиванием в потоке с использованием различных пестицидов и диапазонов регулировки коэффициента смешивания. Испытание на равномерность смешивания показало, что разработанная система обеспечивает хорошую равномерность, а максимальный коэффициент равномерности соотношения смешивания составил 9,7%. Испытание на стабильность показало, что коэффициент смешивания в разработанной системе относительно стабилен: максимальное стандартное отклонение составляло около 2,2% от среднего значения, а максимальное среднее отклонение было менее 1,5%. Испытание на точность и время отклика показало, что среднее отклонение коэффициента смешивания в разработанной системе при ступенчатом изменении заданного коэффициента составляло менее 2,7%, а максимальное время отклика — 3,4 с. Результаты показывают, что разработанная двухканальная система смешивания в потоке обладает хорошими характеристиками, а полученные результаты могут служить основой для проектирования и оптимизации подобных систем.
1. Введение
Кукуруза и соя являются важными продовольственными и товарными культурами во всем мире. По мере роста международного спроса методы их возделывания постоянно развиваются и совершенствуются [1,2]. В последнее время смешанный (совместный) способ посева кукурузы и сои привлекает значительное внимание благодаря эффективному использованию земельных ресурсов, существенному повышению общей продуктивности земли и улучшению плодородия почвы [3,4]. Например, в режиме высокой урожайности при смешанном посеве кукурузы и сои, который был исследован и применялся в Эньяне, провинция Сычуань, Китай, этот способ посева увеличил урожайность сои и кукурузы с акра на 18,97% и 39,18% соответственно [5]. Тем не менее, хотя полосное совместное возделывание кукурузы и сои дает многочисленные преимущества, оно также предъявляет жесткие требования к эксплуатационным характеристикам соответствующей сельскохозяйственной техники [6]. Согласно агрономическим требованиям, расстояние посадки между кукурузой и соей относительно невелико, а типы болезней и вредителей, поражающих эти две культуры, значительно различаются [7,8,9,10]. Традиционные методы раздельного внесения для борьбы с сорняками не только неэффективны, но и не могут обеспечить точную дозировку и покрытие, что приводит к таким проблемам, как неправильное применение, чрезмерное использование и потери пестицидов, создавая тем самым потенциальные риски для роста культур и безопасности окружающей среды [11].
В последние годы для решения проблем потери химикатов, загрязнения окружающей среды и рисков для здоровья, связанных с традиционными технологиями предварительного смешивания, инлайн-системы смешивания для машин защиты растений привлекли значительное внимание и исследования. Ученые как на внутреннем, так и на международном уровне провели обширные исследования инлайн-систем смешивания пестицидов с различных точек зрения для улучшения их функциональности. Чтобы удовлетворить требования точного земледелия, Chen et al. [Чэнь и др.] разработали систему непосредственного впрыска инлайн-смешивания пестицидов с использованием нечеткого ПИД-регулирования, сконструировали бесконтактный модуль обнаружения коэффициента смешивания пестицидов на основе принципов оптического пропускания, создали испытательный стенд и провели всесторонние горизонтальные и вертикальные сравнительные испытания, тем самым подтвердив превосходные эксплуатационные характеристики разработанной инлайн-системы смешивания пестицидов [12]. Для достижения переменного распыления и контроля ширины Jiang et al. [Цзян и др.] представили инновационную инлайн-систему управления впрыском, включающую высокоточную технологию обнаружения потока жидкости в реальном времени и алгоритм управления DMC (динамического матричного управления) для мониторинга и регулирования объема впрыска жидкости, а также оптимизировали временную задержку передачи системы и согласованность смешивания. Эти достижения значительно улучшили производительность инлайн-систем смешивания пестицидов [13]. Однако две вышеупомянутые системы непосредственного впрыска ограничены выполнением базового смешивания и согласования для одного пестицида, что не удовлетворяет конкретным требованиям полосного совместного возделывания кукурузы и сои. Поэтому крайне важно разработать двухканальную инлайн-систему смешивания для пестицидов, чтобы удовлетворить их уникальные потребности в защите растений, включая различные пестициды и разные коэффициенты смешивания. Han et al. [Хань и др.] разработали инлайн-систему смешивания для штангового опрыскивателя, адаптированную для полосного совместного возделывания кукурузы и сои, которая включала такие методы, как калибровка зависимости «коэффициент смешивания – электропроводность» и построение алгоритма режима управления, что позволило применять ее в сложных сценариях посадки. Производительность этой системы была подтверждена посредством реальных натурных испытаний на транспортном средстве [14]. Тем не менее, текущая инлайн-система смешивания пестицидов лишена интеграции, что затрудняет ее адаптацию к другому оборудованию для внесения пестицидов. Кроме того, из-за неровного рельефа полевых дорог обеспечение эксплуатационной стабильности критически важных компонентов, таких как насос для пестицидов, создает значительные трудности, что влияет на общую рабочую производительность. На основе анализа главных компонентов (PCA), Dai et al. [Дай и др.] интегрировали методы обработки изображений и машинного обучения для обнаружения коэффициентов смешивания в инлайн-системах смешивания [15], значительно повысив точность оценки равномерности и коэффициента смешивания. Этот подход позволил провести всесторонний анализ динамической согласованности концентрации внутри системы. Однако из-за строгих требований к освещению для высокоскоростных камер и трудоемкости последующего анализа этот метод больше подходит для изучения характеристик смешивания в динамических потоках, а не для мониторинга полевых операций опрыскивателя в реальном времени.
В этом исследовании была разработана многоканальная инлайн-система смешивания с непосредственным впрыском для полосного совместного возделывания кукурузы и сои в ответ на конкретные эксплуатационные требования современных опрыскивателей. Эта система обеспечивает равномерное смешивание, а также быстрое, точное и стабильное управление коэффициентом смешивания. Используя управление электрически регулируемыми клапанами в реальном времени, система достигла точной регулировки потока впрыскиваемой жидкости. Была разработана двухканальная инлайн-система смешивания пестицидов с непосредственным впрыском, интегрирующая одноканальный модуль инлайн-смешивания пестицидов. Были проведены обширные испытания для обеспечения равномерности смешивания пестицидов и точности управления коэффициентом смешивания, тем самым подтверждая превосходную производительность разработанной двухканальной инлайн-системы смешивания пестицидов. Результаты этого исследования служат ценным справочным материалом для разработки инлайн-систем смешивания пестицидов, адаптированных к полосному совместному возделыванию кукурузы и сои. Интегрированная инлайн-система смешивания пестицидов после соответствующей модификации и расширения может быть эффективно применена к различным культурам, демонстрируя широкую применимость и универсальность.
2. Материалы и методы
2.1. Агрономические условия полосного совместного возделывания кукурузы и сои
Полосное совместное возделывание кукурузы и сои значительно повышает использование земли и увеличивает доходы фермеров при заданной площади земли. Чтобы максимально использовать пространство для роста, метод совместного возделывания обычно включает посадку от двух до шести рядов сои и от двух до четырех рядов кукурузы в комбинированном режиме посева кукурузы и сои. В этом исследовании мы приняли конфигурацию из четырех рядов сои и двух рядов кукурузы. В частности, четыре ряда сои и два ряда кукурузы высаживались попеременно, с расстоянием между рядами 30 см в пределах каждой ленты культуры и расстоянием 70 см между двумя типами лент. На основе агрономических требований выбранного полосного совместного возделывания кукурузы и сои были внесены изменения в расположение распылителей и добавлены дополнительные распылительные перегородки. На рисунке 1 показаны агрономические требования и схема расположения распылителей для полосного совместного возделывания кукурузы и сои.
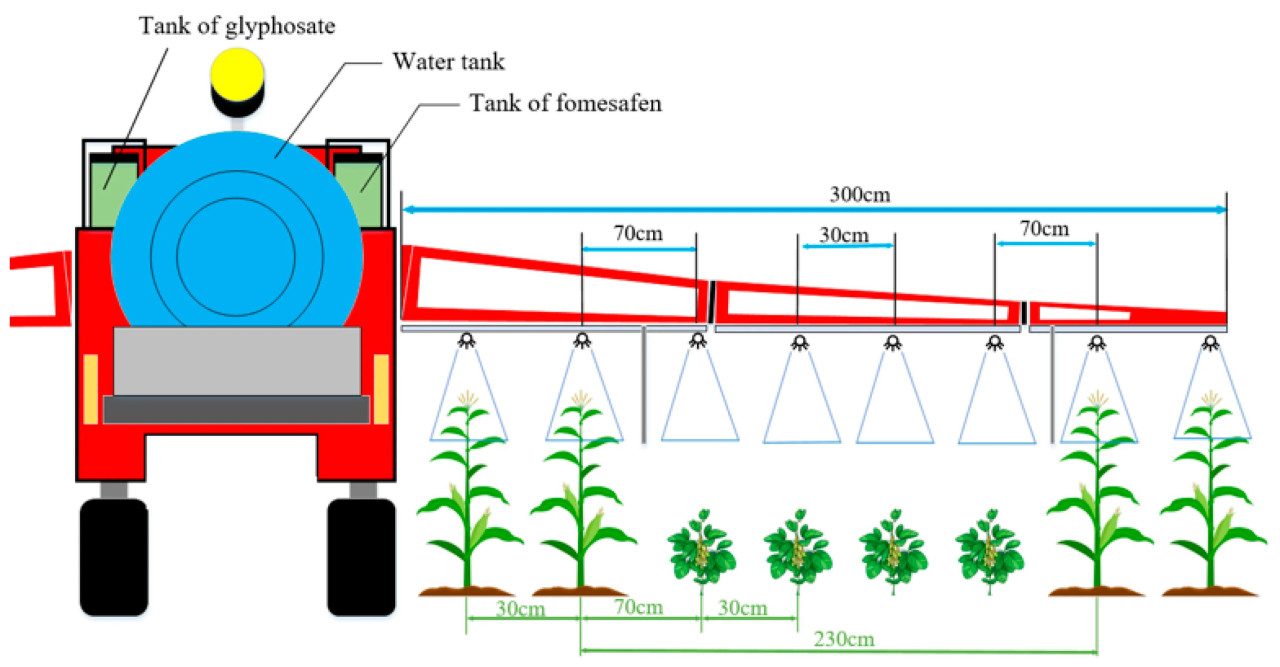
Рисунок 1. Агрономические требования и схема расположения распылителей для полосного комбинированного способа посева кукурузы и сои.
Кукуруза (Zea mays) — однолетнее высокое травянистое растение, родом из Центральной и Южной Америки, является одной из самых урожайных культур в мире. Она служит не только жизненно важной продовольственной культурой, но и является важным сырьем для таких отраслей, как здравоохранение, легкая промышленность и химическая обработка. Соя (Glycine max) — однолетняя трава, родом из Китая, в настоящее время широко возделывается во всем мире. Соя является ключевой продовольственной культурой, семена которой богаты растительными белками, что делает ее пригодной для производства различных соевых продуктов, экстракции соевого масла, варки соевого соуса и выделения белков. Выбранные кукуруза и соя были не-ГМО культурами. В настоящее время чередование сроков внесения пестицидов на двух посевных зонах является распространенной практикой при полосном совместном возделывании. Однако этот подход демонстрирует низкую эффективность и препятствует механизации сельского хозяйства, тем самым препятствуя широкому внедрению полосного совместного возделывания [16,17]. Для повышения эксплуатационной эффективности в качестве рабочей платформы был использован самоходный опрыскиватель с распылительной штангой для выполнения одновременного сплошного опрыскивания. Фомезофен и глифосат были использованы в качестве гербицидов для сои и кукурузы соответственно [18,19]. Фомезофен в основном применяется для борьбы с широколистными сорняками на полях сои, хлопка и других культур. Он содержит 95% действующего вещества и представляет собой серовато-белый порошкообразный твердый продукт [20]. Глифосат широко используется для борьбы с сорняками на сельскохозяйственных угодьях и характеризуется формой белого кристаллического порошка [21,22]. Оба гербицида проявляют свойства ионной диссоциации в водных растворах, что приводит к увеличению электропроводности раствора с ростом коэффициента смешивания. Значения электропроводности концентрированного раствора пестицида и конечного смешанного распыляемого раствора могут быть измерены с помощью датчика электропроводности, что позволяет косвенно определить коэффициент смешивания двух пестицидов [23,24,25,26]. Этот метод послужил для проверки работоспособности разработанной двухканальной инлайн-системы смешивания с непосредственным впрыском.
В качестве испытательного прибора был выбран передатчик электропроводности DDS-11A производства QIWEI (Ханчжоу, Китай), с диапазоном измерения электропроводности 0–2 × 10⁵ мкСм/см и точностью ±1% от полной шкалы. Это устройство широко используется для обнаружения сигналов электропроводности растворов и коэффициентов смешивания благодаря своей высокой точности, широкому диапазону измерений и простоте использования. Для эксперимента был выбран 250 г/л раствор фомезофена от JUFENGYUAN (Циндао, Китай) и 30% раствор глифосата от DINGBANG (Наньнин, Китай). Основываясь на рекомендациях по применению этих пестицидов, типичные коэффициенты смешивания составляли приблизительно 0,2% для раствора фомезофена (с 250 г/л действующего вещества) и 2% для раствора глифосата (с 30% действующего вещества). Следовательно, исходный раствор фомезофена был приготовлен в соотношении 1:10 с водой, что дало общий объем 100 мл. 30% раствор глифосата послужил исходным раствором для глифосата. Следуя коэффициентам смешивания, указанным в таблице 1 и таблице 2, исходные растворы фомезофена и глифосата были соответствующим образом разбавлены. Затем значения электропроводности разбавленных смешанных растворов были измерены и откалиброваны с помощью передатчика электропроводности, причем каждое измерение повторялось три раза для получения среднего значения.
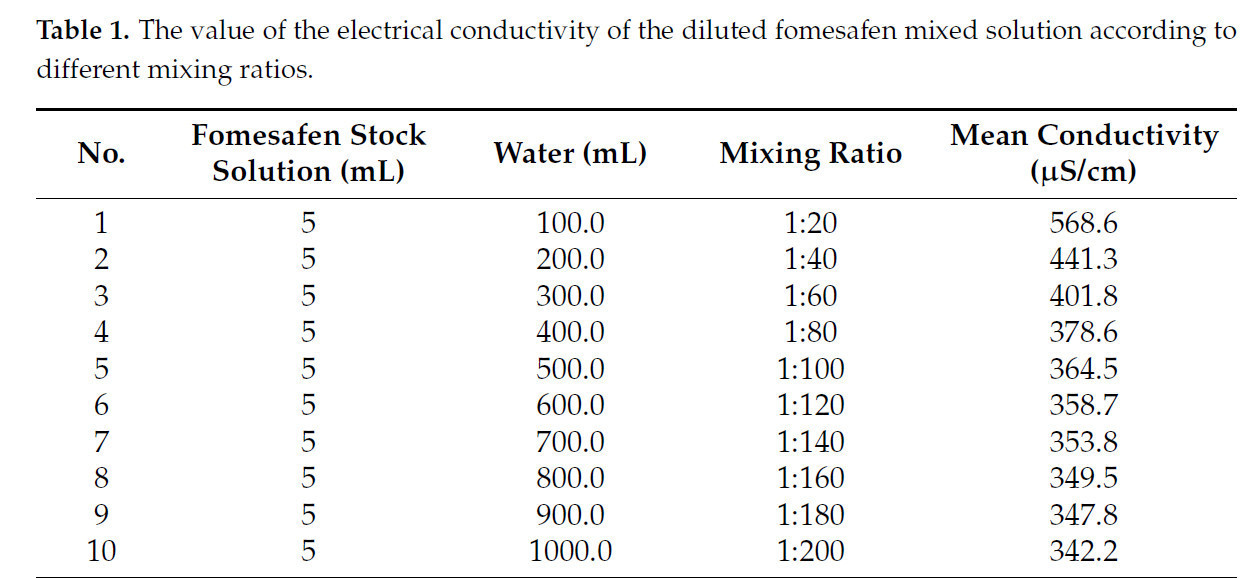
Таблица 1. Значение электропроводности разбавленного смешанного раствора фомезофена в соответствии с различными коэффициентами смешивания.
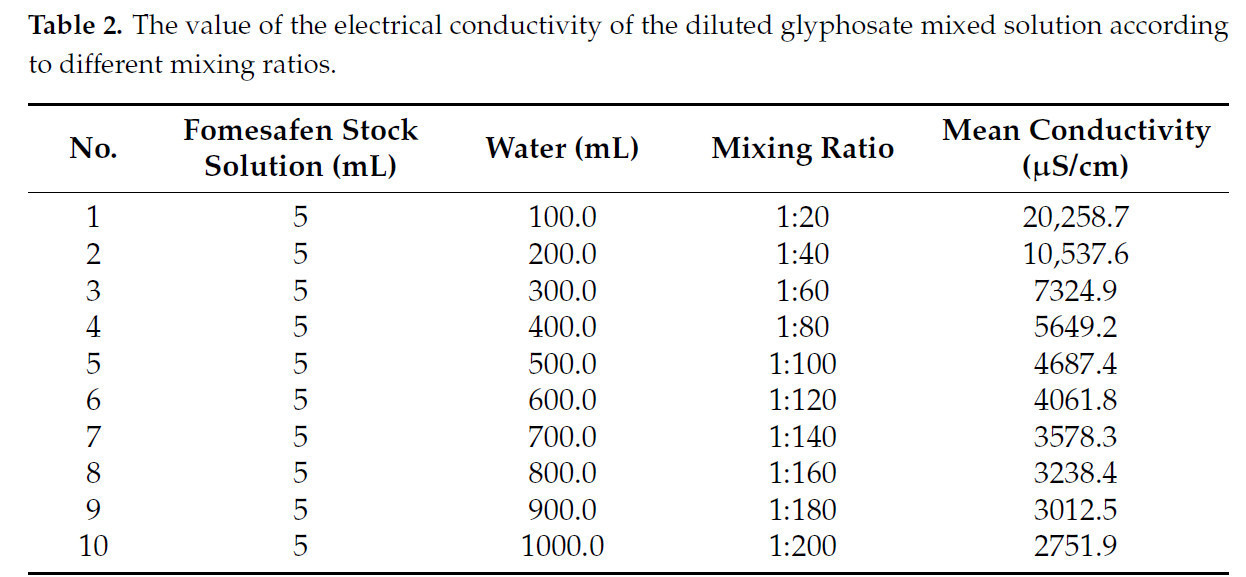
Таблица 2. Значение электропроводности разбавленного смешанного раствора глифосата в соответствии с различными коэффициентами смешивания.
Как показано в таблице 1, значения электропроводности смешанных растворов фомезофена, приготовленных при различных коэффициентах разбавления, были измерены трижды для каждой группы, и были рассчитаны средние значения. Эти данные послужили для калибровки и анализа электропроводности и коэффициентов смешивания водных растворов, содержащих различные пропорции фомезофена, что позволило выполнить аппроксимацию кривой вышеуказанных данных. После аппроксимации было очевидно, что функциональная зависимость между коэффициентом смешивания β и электропроводностью EC смешанного раствора фомезофена была следующей:

Как показано на рисунке 2, R² аппроксимирующей кривой составил 0,99373. На основе этой функциональной зависимости расчет электропроводности смешанного раствора фомезофена был преобразован в сигнал коэффициента смешивания, тем самым подтверждая точность регулировки коэффициента смешивания для исходного раствора фомезофена.
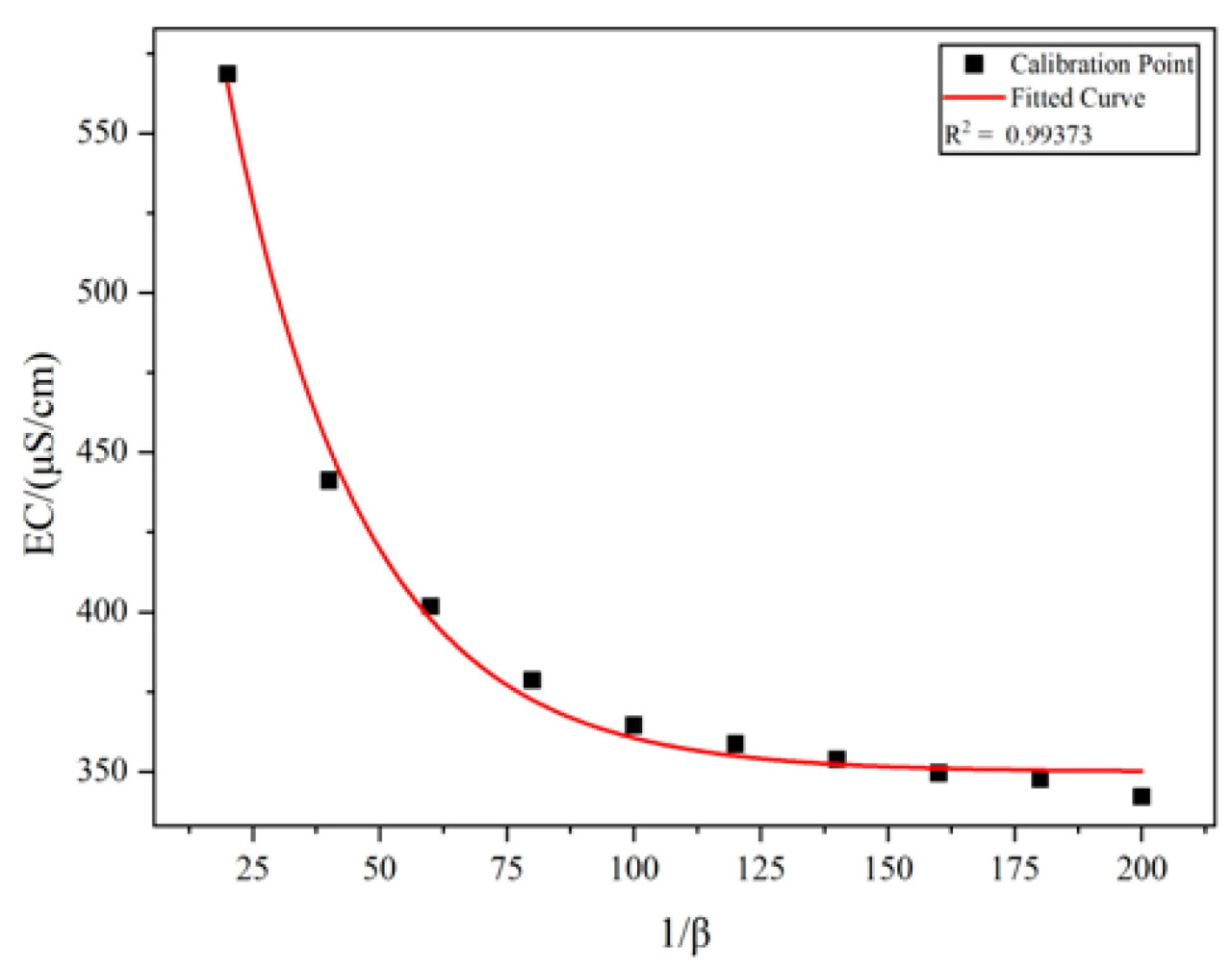
Рисунок 2. Аппроксимирующая кривая калибровочных данных для фомезофена.
Как показано в таблице 2, значения электропроводности смешанного раствора глифосата, приготовленного при различных коэффициентах разбавления, были измерены трижды для каждой группы, и были рассчитаны средние значения. На основе собранных данных были откалиброваны и проанализированы электропроводность водных растворов глифосата при разных концентрациях и коэффициент смешивания веществ. Затем эти данные были подвергнуты аппроксимации кривой. После процесса аппроксимации функциональная зависимость между коэффициентом смешивания β и электропроводностью смешанного раствора глифосата была установлена следующим образом:

Как показано на рисунке 3, R² аппроксимирующей кривой составил 0,99316. На основе этой функциональной зависимости расчет электропроводности смешанного раствора глифосата был преобразован в сигнал коэффициента смешивания, тем самым подтверждая точность регулировки коэффициента смешивания для исходного раствора глифосата.
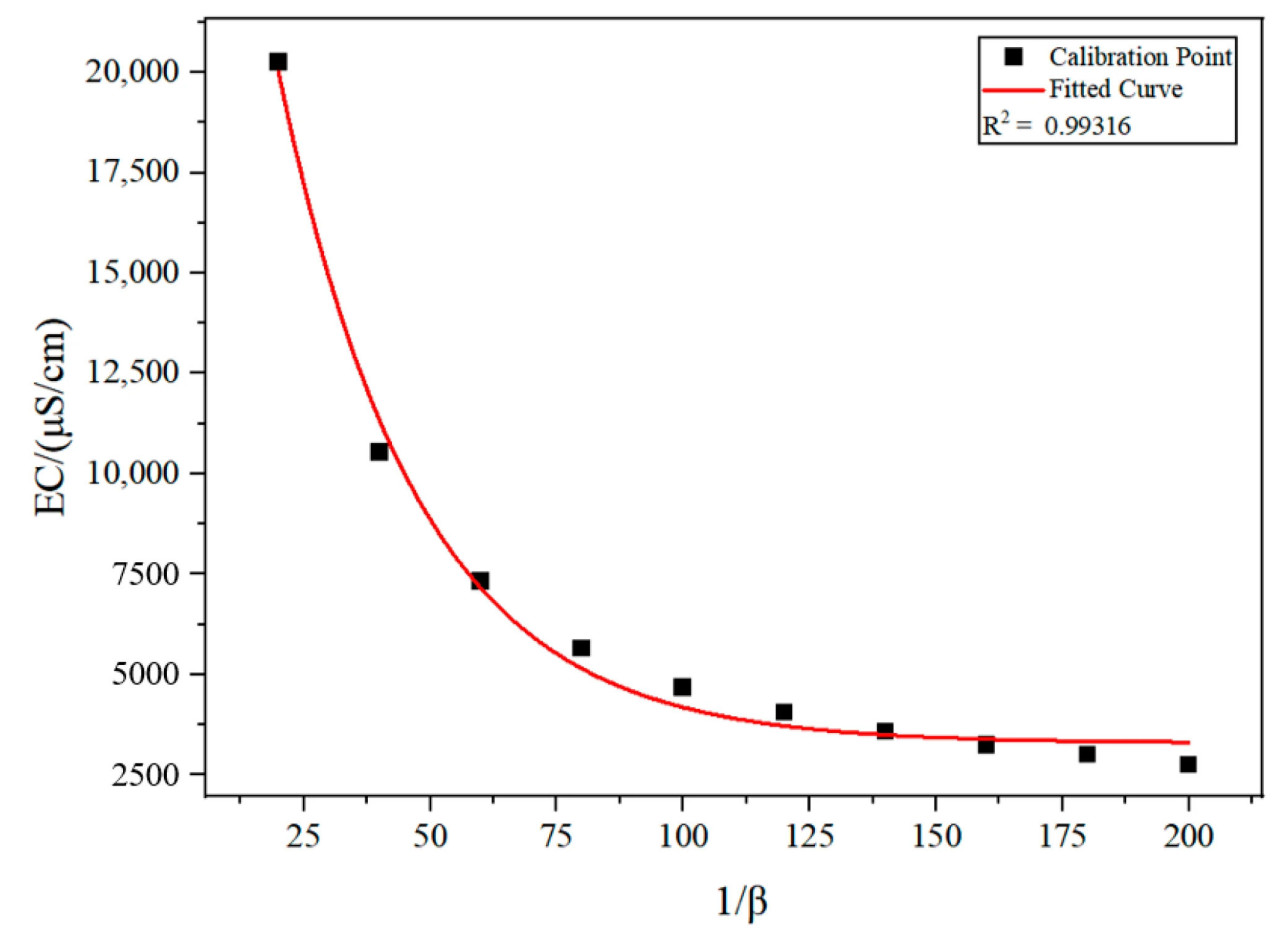
Рисунок 3. Аппроксимирующая кривая калибровочных данных для глифосата.
2.2. Принцип работы двухканальной инлайн-системы смешивания с непосредственным впрыском
Для решения проблемы ущерба от сорняков в условиях совместного возделывания кукурузы и сои была разработана двухканальная инлайн-система смешивания пестицидов с непосредственным впрыском, чтобы удовлетворить конкретные требования защиты растений для различных пестицидов и разных коэффициентов смешивания [27]. Как показано на рисунке 4, разработанная двухканальная инлайн-система смешивания пестицидов с непосредственным впрыском в основном состояла из трех компонентов: модуля впрыска водного растворителя, модуля впрыска и смешивания глифосата (для кукурузы) и модуля впрыска и смешивания фомезофена (для сои).
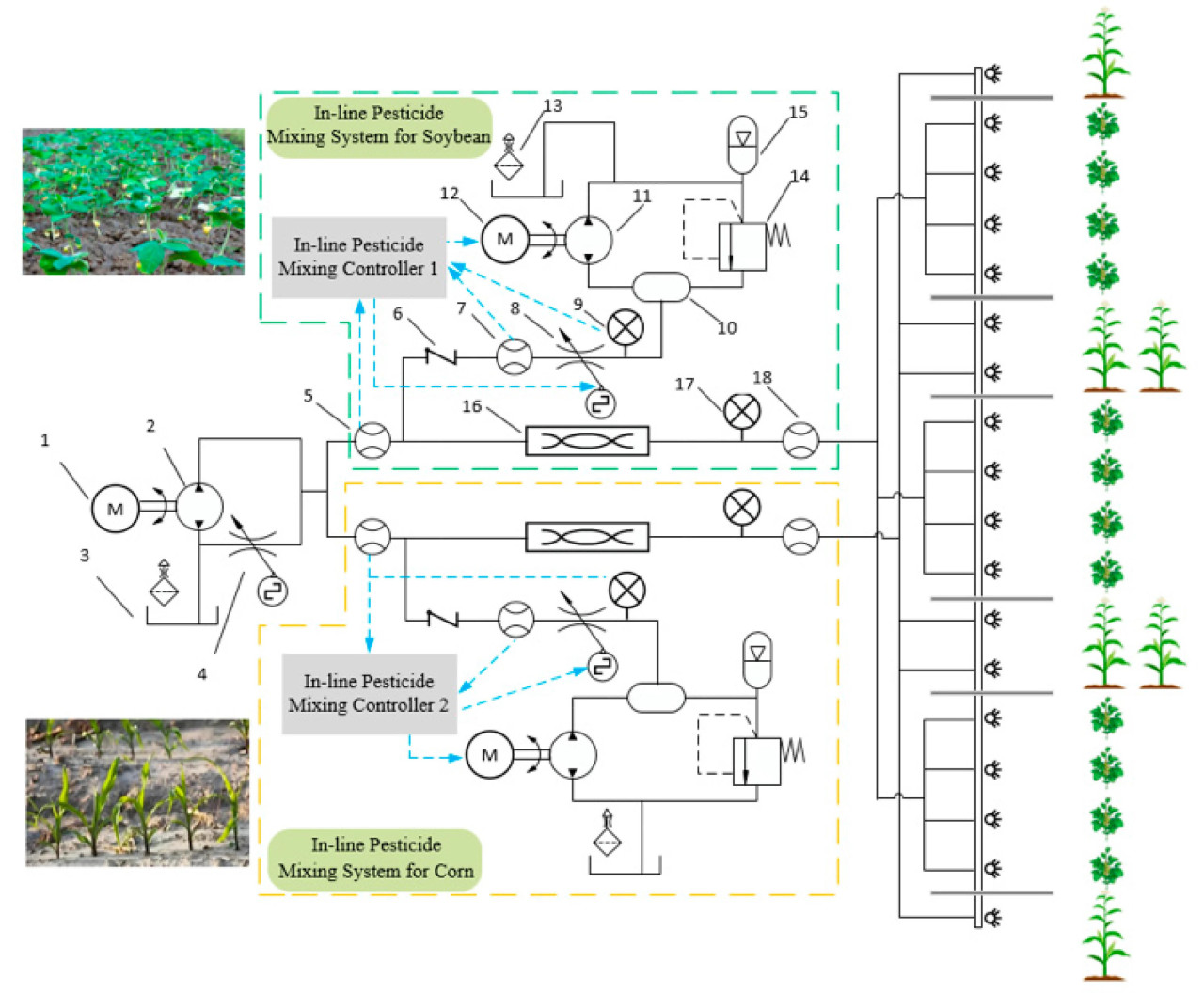
Рисунок 4. Схема трубопроводов двухканальной инлайн-системы смешивания с непосредственным впрыском. 1 — двигатель водяного насоса, 2 — плунжерный насос, 3 — бак для воды, 4 — байпасный регулятор рециркуляции, 5 — датчик расхода водного растворителя, 6 — обратный клапан, 7 — датчик расхода впрыска пестицида, 8 — электрический регулирующий клапан, 9 — датчик давления системы впрыска пестицида, 10 — напорный бак для пестицида, 11 — насос для пестицида, 12 — двигатель насоса пестицида, 13 — бак для пестицида, 14 — электромагнитный предохранительный клапан, 15 — гидроаккумулятор, 16 — статический смеситель, 17 — датчик давления распыления, 18 — датчик расхода распылителя.
Модуль впрыска водного растворителя в основном состоял из бесщеточного двигателя постоянного тока, плунжерного насоса, водяного бака, байпасного регулятора рециркуляции, датчика расхода водного растворителя (для кукурузы) и датчика расхода водного растворителя (для сои) и был способен в реальном времени отслеживать сигналы потока, поступающие в каждый модуль впрыска и смешивания пестицидов, облегчая последующий расчет данных коэффициента смешивания. Был установлен байпасный клапан управления рециркуляцией для регулирования общего потока воды и растворителя, поступающего в двухканальную систему смешивания. Модуль впрыска и смешивания пестицида содержал статический смеситель, датчик расхода пестицида, обратный клапан, электрический регулирующий клапан, датчик давления пестицида, напорный бак для пестицида, насос для пестицида, бесщеточный двигатель постоянного тока, бак для пестицида, электромагнитный предохранительный клапан и гидроаккумулятор. Насос пестицида первоначально перекачивал раствор пестицида в компонент для хранения жидкости, который включал напорный бак для пестицида и гидроаккумулятор, служащие для стабилизации давления и накопления энергии. Впоследствии скорость потока впрыска контролировалась путем точной регулировки открытия электрического регулирующего клапана, тем самым управляя коэффициентом смешивания. На конце модуля впрыска и смешивания жидкости также был установлен электромагнитный предохранительный клапан для предотвращения чрезмерного давления в компоненте хранения жидкости и обеспечения защиты от сброса давления.
Для распыления был выбран веерный распылитель VP110-03 производства SHUANGLONG (Биньчжоу, Китай) с давлением в распылителе 0,3 МПа и расходом 1,1–1,2 л/мин на один распылитель. Всего было установлено 18 распылителей. На основе 3WPG-300 высотно-очищенного самоходного опрыскивателя, разработанного нашей командой, была разработана двухканальная инлайн-система смешивания. Скорость движения опрыскивателя была установлена на уровне 6 км/ч. Кроме того, он был оснащен трехцилиндровым поршневым насосом JD-26-3 в качестве водяного насоса, который имел скорость потока от 12 до 20 л/мин, с максимумом 20 л/мин. Коэффициент смешивания β варьировался от 1:200 до 1:20, с максимумом 1:20. Максимальная общая скорость потока смешанного раствора может быть получена суммированием скорости впрыска пестицида и скорости потока водного растворителя. Диапазон впрыска жидкого пестицида может быть рассчитан с использованием уравнения (4), в то время как максимальная скорость потока смешанного раствора может быть определена с использованием уравнения (5).

Среди этих параметров Qmax представляет максимальную общую скорость потока смешанного раствора, Qw обозначает скорость потока водного растворителя, β означает коэффициент смешивания, а Qp показывает скорость потока впрыска пестицида. Подстановка данных в расчет показала, что максимальная скорость потока Qmax составляла 21 л/мин, при этом Qp варьировался от 0,06 до 1 л/мин.
Учитывая рабочую среду, метод установки, характеристики расхода клапана и экономическую эффективность датчиков расхода, для измерения расхода водного растворителя был выбран датчик расхода Холла PN-HI2144 производства компании Wenzhou PENAI (Вэньчжоу, Китай), в то время как для измерения расхода впрыска пестицида был выбран турбинный расходомер GICAR-5111 производства компании Hangzhou YIKONG Technology (Ханчжоу, Китай). Высокоточный турбинный расходомер GICAR-5111 был установлен на выходе электрического регулирующего клапана, с диапазоном обнаружения расхода от 2,7 до 124,8 л/ч, рабочим давлением от 0,2 до 1 МПа и точностью ±2%. Эта установка позволила осуществлять мониторинг скорости потока впрыскиваемого пестицида в реальном времени. Собирая сигналы потока как от водного растворителя, так и от жидкости пестицида, коэффициент смешивания может быть точно аппроксимирован.
2.3. Принцип работы системы управления двухканальным инлайн-смешиванием с непосредственным впрыском
Плата разработки STM32F103VET6 служит основным контроллером в системе управления двухканальным инлайн-смешиванием с непосредственным впрыском, разработанной этим исследовательским институтом. В основе контроллера лежит 32-разрядный процессор на архитектуре ARM Cortex-M3, способный работать на частотах до 72 МГц. Система в основном собирает сигналы обнаружения от датчиков давления, датчиков расхода, датчиков электропроводности и других датчиков посредством аналого-цифрового (АЦП) преобразования. Чтобы устранить помехи, вызванные значительным шумом, и обеспечить точность собираемых данных и стабильность последующих процессов управления, в программу был включен алгоритм фильтрации с ограничением среднего значения.
Способность достигать точного, стабильного и быстрого управления коэффициентом смешивания напрямую коррелирует с точностью исполнительного устройства [28]. Для этой цели был выбран электрический регулирующий клапан FRSQT11F-16P производства компании Jiangsu FREESUN (Сучжоу, Китай) в качестве исполнительного устройства для обеспечения точного управления. Точная и стабильная работа электрического регулирующего клапана в основном достигалась за счет цифро-аналогового (ЦАП) преобразования основным контроллером, а также внешних модулей, таких как модуль усиления сигнала и модуль ослабления сигнала постоянного тока. Следовательно, была создана система управления двухканальным инлайн-смешиванием с непосредственным впрыском, как показано на рисунке 5. Общий рабочий процесс двухканальной инлайн-системы смешивания пестицидов показан на рисунке 6. Параметры настройки нечеткого ПИД-регулятора были Kp = 2,5, Ki = 0,5 и Kd = 0,01. Правила нечеткой логики показаны в таблицах 3, 4 и 5. Во-первых, информация о целевом коэффициенте смешивания каждого пестицида при крейсерской скорости рассчитывалась в соответствии с агрономическими требованиями к вносимым пестицидам, затем информация о целевом коэффициенте смешивания вводилась через дисплейный терминал, подключенный к контроллеру, и контроллер рассчитывал целевой расход впрыска пестицида в соответствии с расходом водного растворителя в реальном времени. Сигнал обнаружения высокоточного турбинного расходомера использовался в качестве сигнала обратной связи, и контроллер управлял открытием электрического регулирующего клапана в соответствии с разницей между целевым значением и значением обратной связи для регулировки коэффициента смешивания.
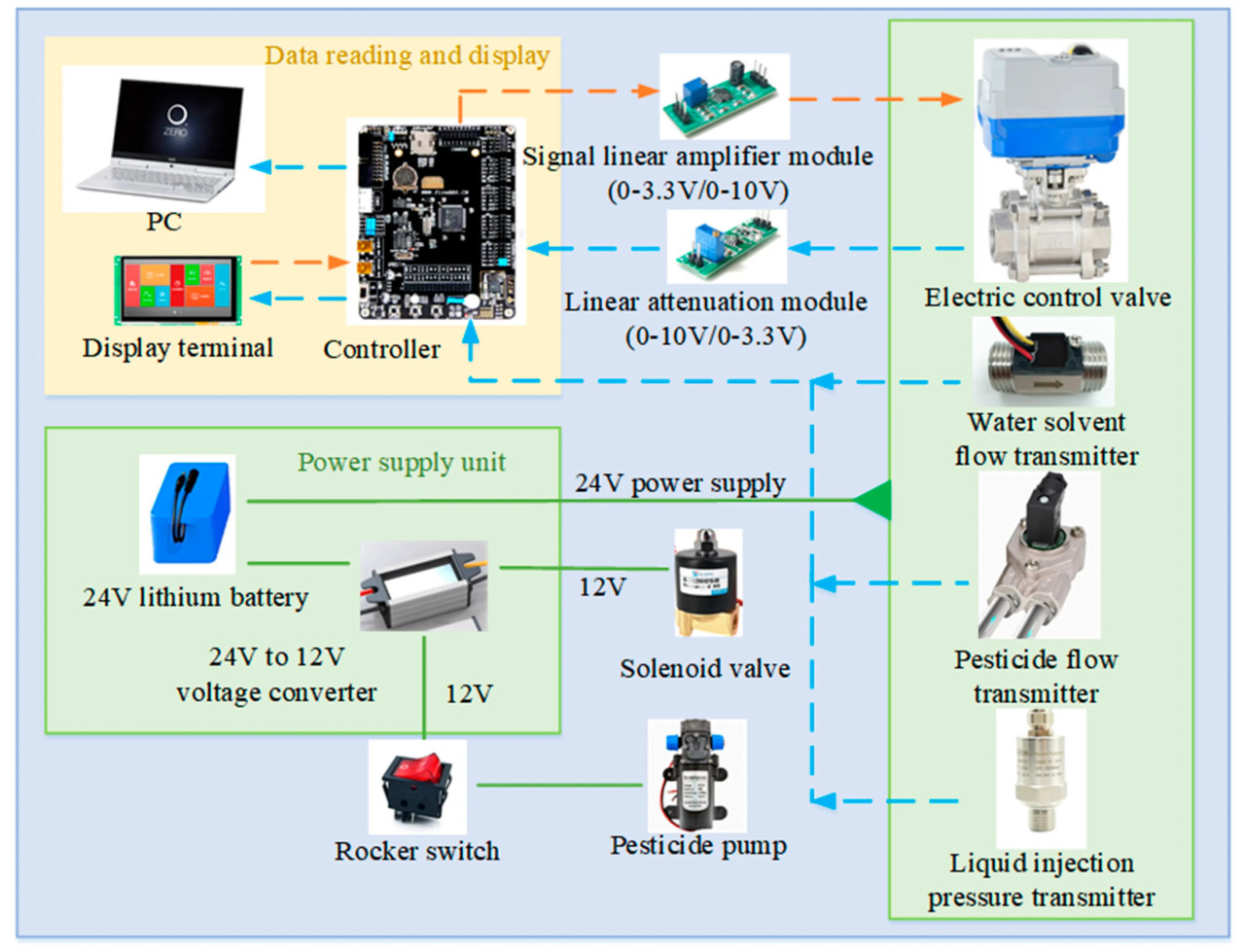
Рисунок 5. Схема физического подключения двухканальной системы управления инлайн-смешиванием.
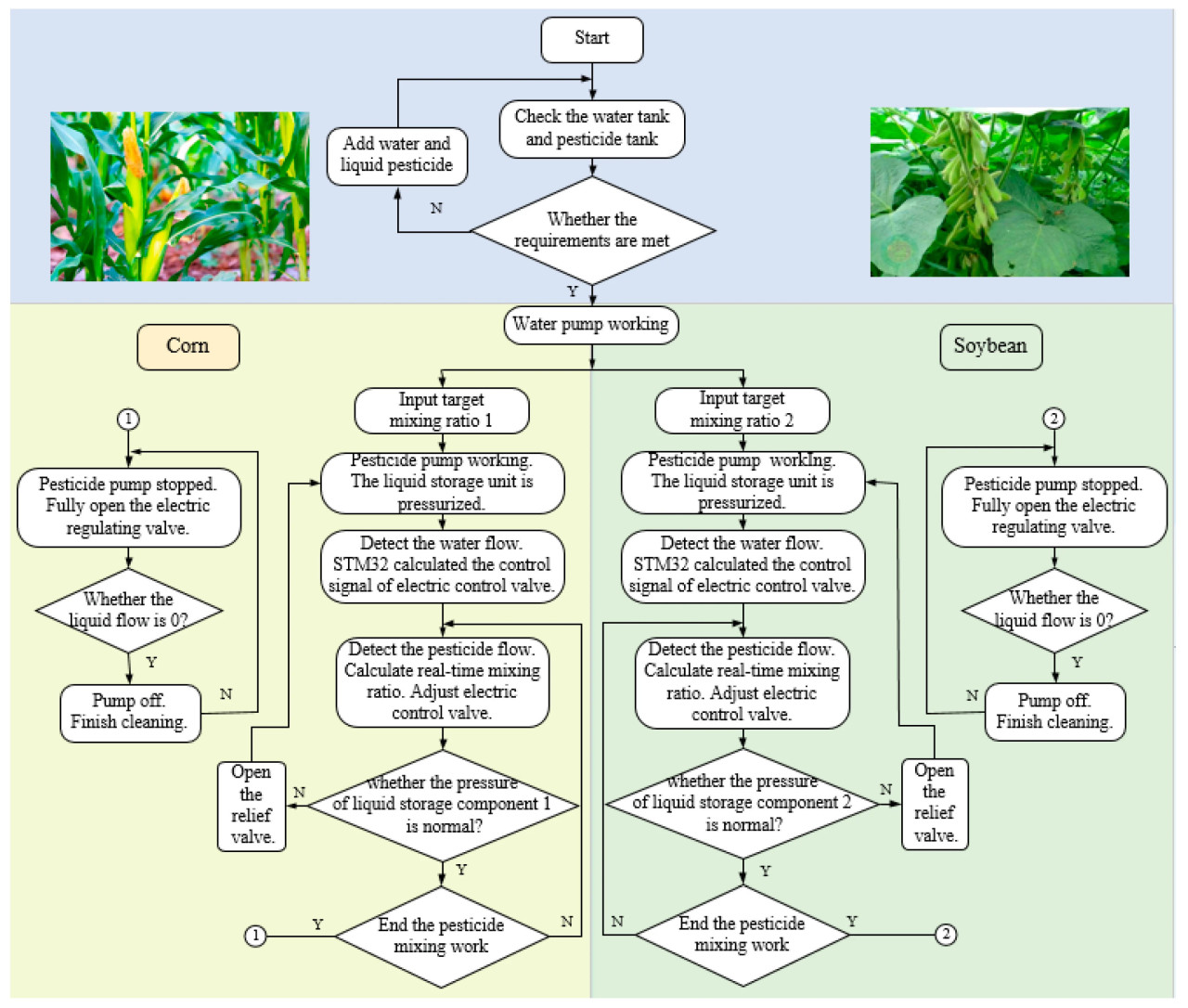
Рисунок 6. Блок-схема двухканальной системы управления инлайн-смешиванием. (Цифры 1 и 2 на рисунке использованы для различения рабочего процесса двухканальной инлайн-системы смешивания пестицидов, когда она работает для двух разных пестицидов).
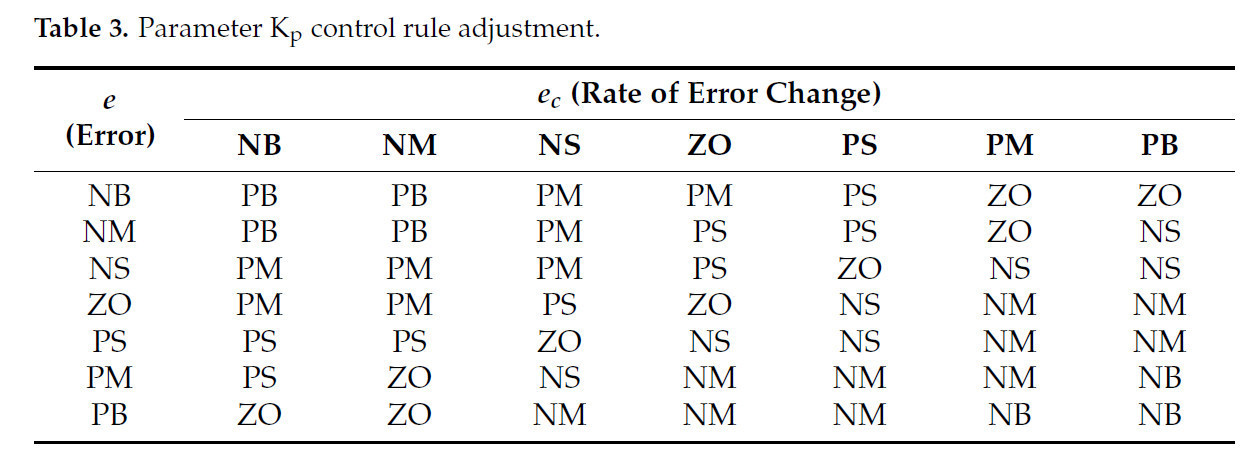
Таблица 3. Регулировка правил управления параметром Kp.
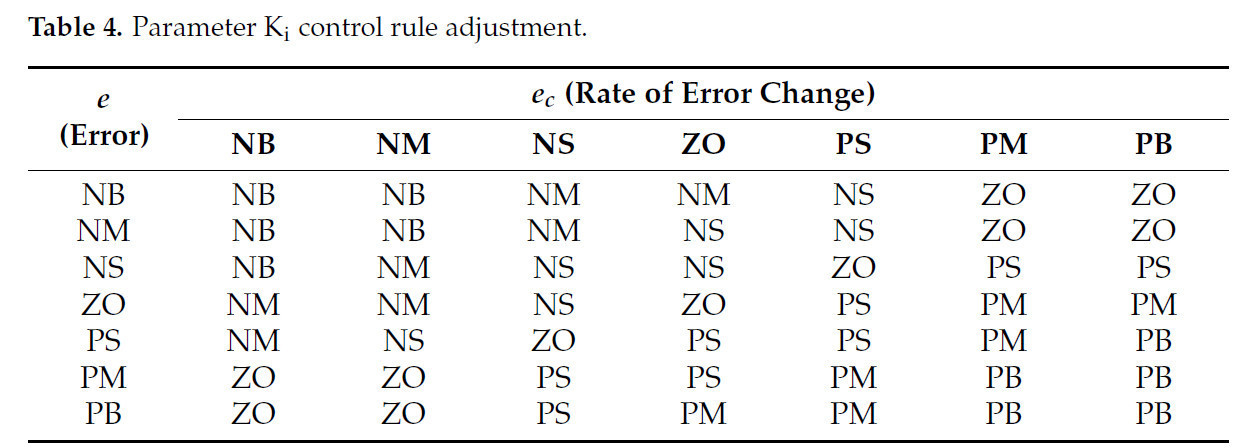
Таблица 4. Регулировка правил управления параметром Ki.
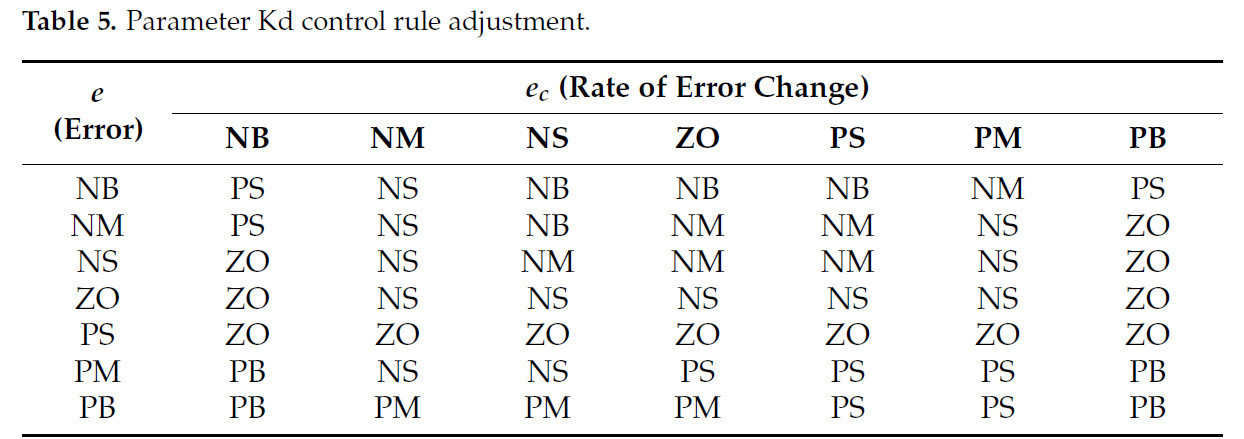
Таблица 5. Регулировка правил управления параметром Kd.
В настоящее время проведено несколько исследований по инлайн-обнаружению коэффициентов смешивания, причем основные методы включают метод светопропускания, метод высокоскоростной камеры, метод электропроводности и метод волоконно-оптических датчиков и другие [29,30]. Однако эти подходы требуют включения различных компонентов обнаружения в инлайн-систему смешивания, что требует дополнительного места для установки и делает элементы обнаружения восприимчивыми к внешним помехам, таким как полевые завихрения, что приводит к неточным результатам обнаружения. Следовательно, в этом исследовании предлагалось использовать сигналы датчика расхода водного растворителя в реальном времени и высокоточного турбинного расходомера после фильтрации и обработки для получения сигналов коэффициента смешивания в реальном времени. Расхождение между полученным сигналом коэффициента смешивания и целевым коэффициентом смешивания включалось в алгоритм управления в качестве влияющего фактора для облегчения последующих корректировок для повышения точности управления коэффициентом смешивания.
Чтобы обеспечить осуществимость вышеупомянутого метода обнаружения информации о коэффициенте смешивания, ранее упомянутый исходный раствор глифосата, содержащий 30% действующего вещества, был выбран в качестве испытательного материала. Смешанный раствор глифосата был приготовлен при условиях целевого коэффициента смешивания в соответствии с параметрами испытаний, изложенными в таблице 6. Для измерения целевой электропроводности смешанного раствора использовался датчик электропроводности. Одновременно целевой коэффициент смешивания для инлайн-системы смешивания пестицидов был установлен на основе условий, указанных в таблице 6. Как только инлайн-система смешивания пестицидов достигала стабильного рабочего состояния, распыляемая жидкость собиралась из каждого распылителя, и значения электропроводности измерялись с помощью датчика электропроводности. Среднее значение представляет фактическую электропроводность смешанного раствора пестицида. Фактические результаты электропроводности смешанного раствора глифосата при условиях целевого коэффициента смешивания представлены в таблице 6.
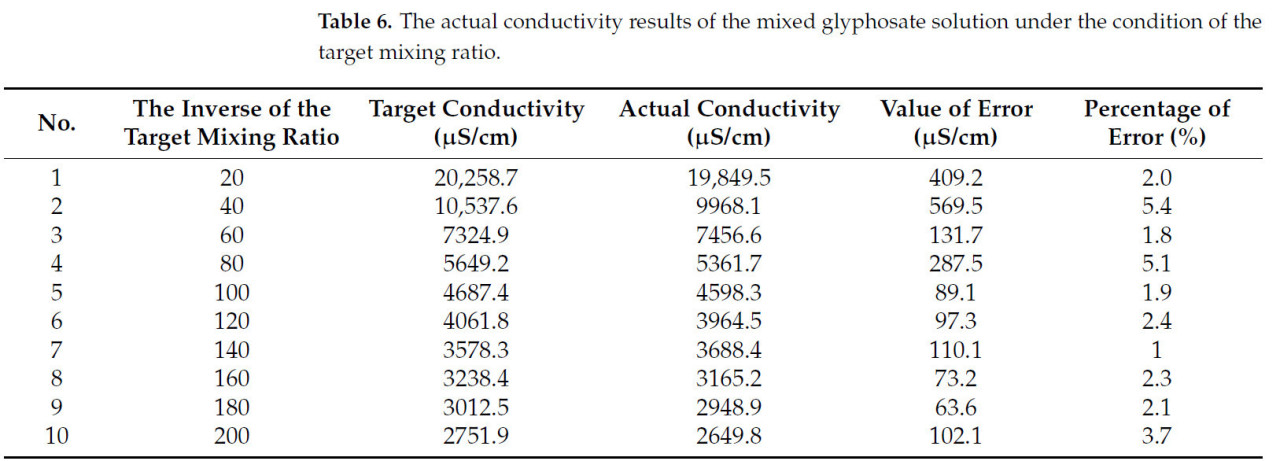
Таблица 6. Фактические результаты электропроводности смешанного раствора глифосата при условии целевого коэффициента смешивания.
На основе данных, представленных в таблице 6, очевидно, что максимальная ошибка коэффициента смешивания составила 5,4%, что является относительно незначительным расхождением, которое удовлетворяло критериям обнаружения коэффициента смешивания. Следовательно, вышеупомянутый метод был способен точно собирать информацию о коэффициенте смешивания.
Из-за расширения исходной одноканальной инлайн-системы смешивания пестицидов до двухканальной конфигурации и учитывая различные типы пестицидов, выдаваемых каждым распылителем, было крайне важно пересмотреть соединительные трубопроводы распылителей. Чтобы обеспечить равномерность количества жидкости, выдаваемой каждым распылителем, согласованность распыления была проверена до установки модуля впрыска и смешивания пестицидов.
Как показано на рисунке 7, во время устойчивой работы опрыскивателя под каждым распылителем размещался мерный цилиндр для сбора объема жидкости, выданного в течение указанного времени (10 с). Данные об объеме от 18 распылителей представлены на рисунке 7. Коэффициент вариации количества распыления для каждого распылителя за 10 с составил 5,96%, что показывает высокий уровень равномерности распыления, удовлетворяющий эксплуатационным требованиям оборудования защиты растений.
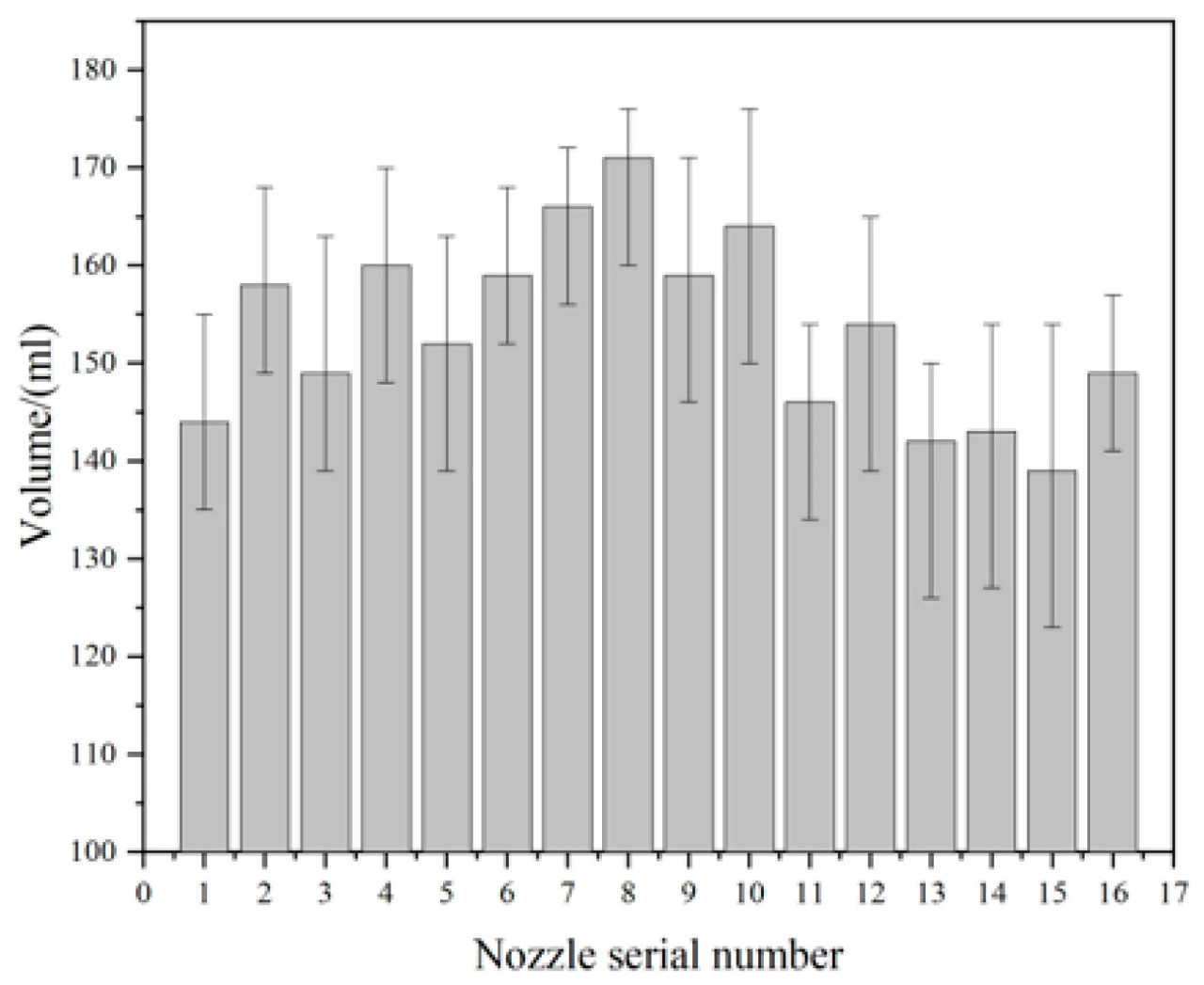
Рисунок 7. Результаты испытания на согласованность распыления.
2.4. Интеграция двухканальной инлайн-системы смешивания с непосредственным впрыском и установка на реальный опрыскиватель
На основе первоначального испытания на согласованность распыления можно сделать вывод, что компонент трубопровода разработанной двухканальной инлайн-системы смешивания для полосного совместного возделывания кукурузы и сои соответствовал основным требованиям к применению. Однако из-за большого количества внутренних исполнительных механизмов и сложности установки предлагаемая инлайн-система смешивания пестицидов могла бы выиграть от модульной интеграции для повышения ее применимости и портативности. На рисунке 8 показана интегрированная схема и физическая компоновка модуля впрыска и смешивания пестицидов.
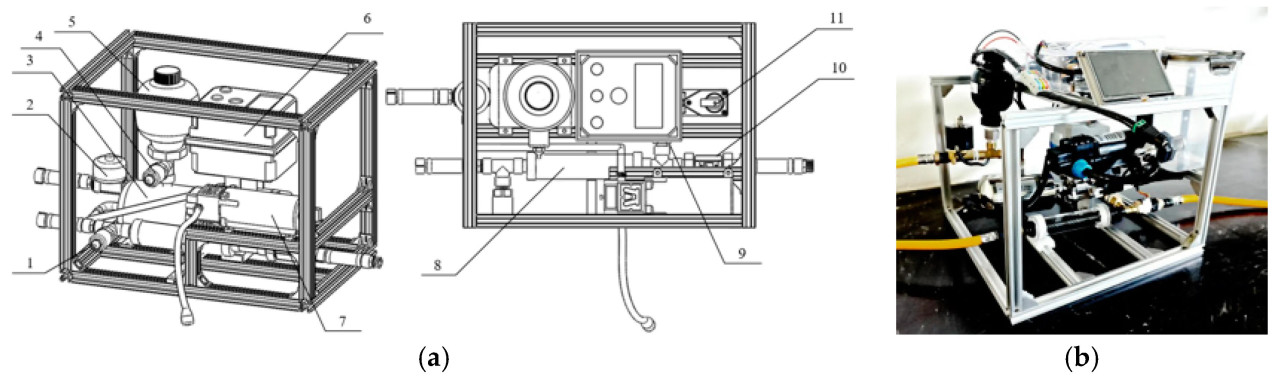
Рисунок 8. Диаграмма интеграции модуля впрыска и смешивания пестицидов и физический вид: (a) диаграмма интеграции; (b) физический вид. 1 — датчик давления смеси, 2 — переливной клапан, 3 — напорный бак для пестицида, 4 — датчик давления, 5 — гидроаккумулятор, 6 — электрический регулирующий клапан, 7 — насос для пестицида, 8 — статический смеситель, 9 — обратный клапан, 10 — датчик расхода водного растворителя, 11 — высокоточный турбинный расходомер.
После интеграции модуля впрыска и смешивания пестицидов он был подключен к двухканальной инлайн-системе смешивания пестицидов для полосного совместного возделывания кукурузы и сои, которая была частью 3WPG-300 высотно-очищенного самоходного опрыскивателя, разработанного нашей командой. Общая структура и положение установки показаны на рисунке 9. Интегрированный модуль впрыска и смешивания пестицидов имеет только четыре порта: интерфейс впрыска водного растворителя, интерфейс впрыска пестицида, интерфейс рециркуляции пестицида и интерфейс вытекания смеси. Остальные внутренние трубопроводы интегрированы внутри, что устраняет необходимость в дополнительном исполнительном устройстве.
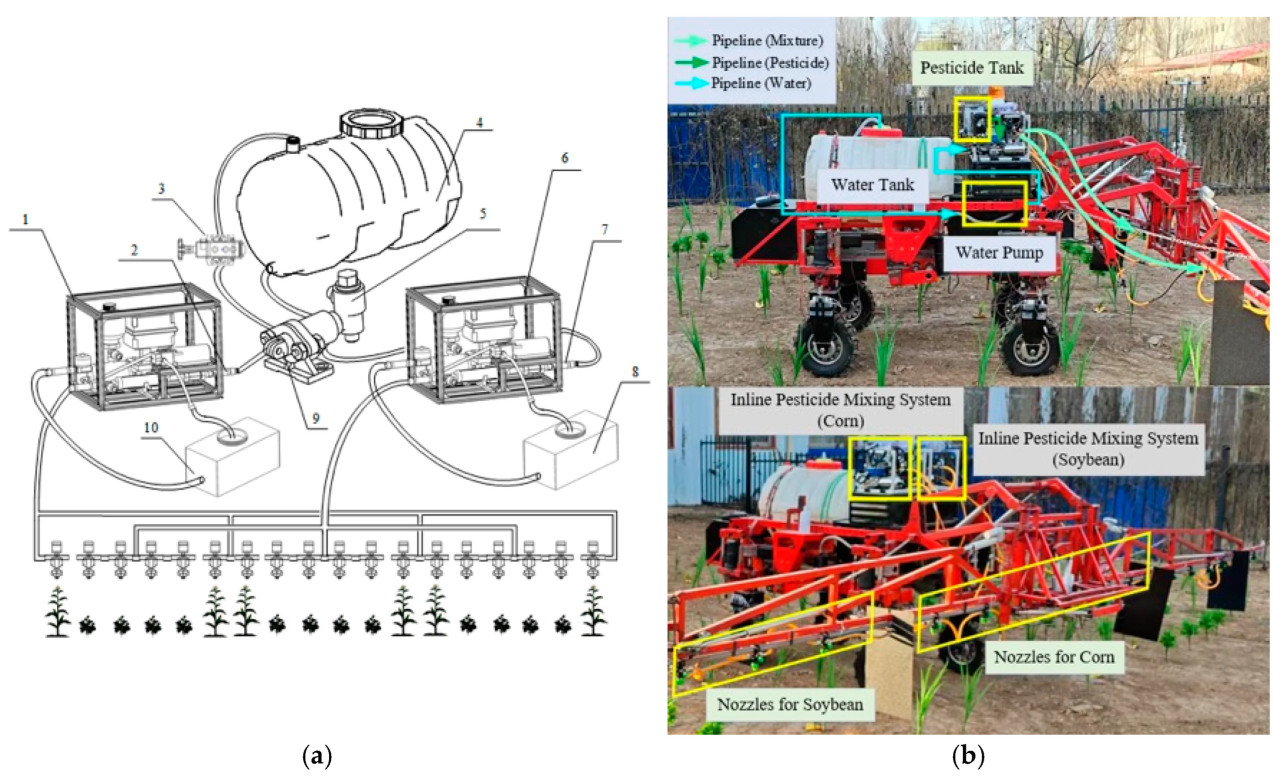
Рисунок 9. Общая структура и установка двухканальной инлайн-системы смешивания опрыскивателя для полосного совместного возделывания кукурузы и сои: (a) общая структура; (b) установка. 1 — модуль впрыска и смешивания глифосата (для кукурузы), 2 — датчик расхода водного растворителя (для кукурузы), 3 — байпасный регулятор рециркуляции, 4 — бак для воды, 5 — двигатель водяного насоса, 6 — модуль впрыска и смешивания фомезофена (для сои), 7 — датчик расхода водного растворителя (для сои), 8 — бак для фомезофена, 9 — плунжерный насос, 10 — бак для глифосата.
3. Результаты
Основываясь на общей архитектуре разработанной в этом исследовании двухканальной инлайн-системы смешивания пестицидов с непосредственным впрыском, модуль впрыска и смешивания пестицида был модуляризован и интегрирован, а система распыления существующего опрыскивателя нашей команды была улучшена [31,32,33,34,35], что позволило ей соответствовать конкретным требованиям к распылению для борьбы с сорняками в режиме совместного возделывания кукурузы и сои. Как показано на рисунке 10, улучшенный опрыскиватель был оснащен двухканальной инлайн-системой смешивания с непосредственным впрыском. Учитывая ограничения экспериментального участка, испытание на стабильность регулировки коэффициента смешивания, точность регулировки коэффициента смешивания и испытание времени отклика проводились путем перемещения опрыскивателя вперед и назад в пределах экспериментального участка. Обнаружение информации о коэффициенте смешивания для двухканальной инлайн-системы смешивания выполнялось с помощью высокоточного турбинного расходомера, который в значительной степени не зависел от условий экспериментального участка. Следовательно, выбранный экспериментальный участок удовлетворял требованиям испытаний.

Рисунок 10. Улучшенный опрыскиватель, оснащенный двухканальной инлайн-системой смешивания с непосредственным впрыском.
3.1. Испытание на равномерность смешивания двухканальной инлайн-системы смешивания
После установки интегрированного модуля впрыска и смешивания пестицидов и настройки системы смешивания опрыскивателя на основе структуры двухканальной инлайн-системы смешивания, показанной на рисунке 4, была оценена равномерность смешивания двухканальной инлайн-системы смешивания. Для этого испытания в качестве исходного раствора глифосата использовался раствор глифосата, содержащий 30% действующего вещества, а исходный раствор фомезофена был приготовлен в соотношении 1:10 с водой. Детальная процедура испытания изложена ниже:
(1) Установите электрический регулирующий клапан на степень открытия 33% и поддерживайте эту настройку; управляйте водяным насосом на его стандартной передаче, обеспечивая нормальное функционирование всех других рабочих компонентов.
(2) После того как двухканальная инлайн-система смешивания достигнет стабильного рабочего состояния, соберите распыляемую жидкость из распылителей, установленных на штанге опрыскивателя.
(3) Измерьте электропроводность собранной распыляемой жидкости из каждого распылителя после отстаивания и рассчитайте коэффициент смешивания.
Распыляемый раствор из 18 распылителей, установленных на распылительной штанге, был собран, и его электропроводность была измерена после двухчасового периода отстаивания. После нескольких испытаний был определен коэффициент смешивания распыляемой жидкости из 18 распылителей, как подробно описано в таблице 7. В частности, растворы, выдаваемые распылителями с номерами 1–12, соответствуют разбавлению исходного раствора фомезофена, в то время как растворы из распылителей 13–18 представляют собой разбавление исходного раствора глифосата.
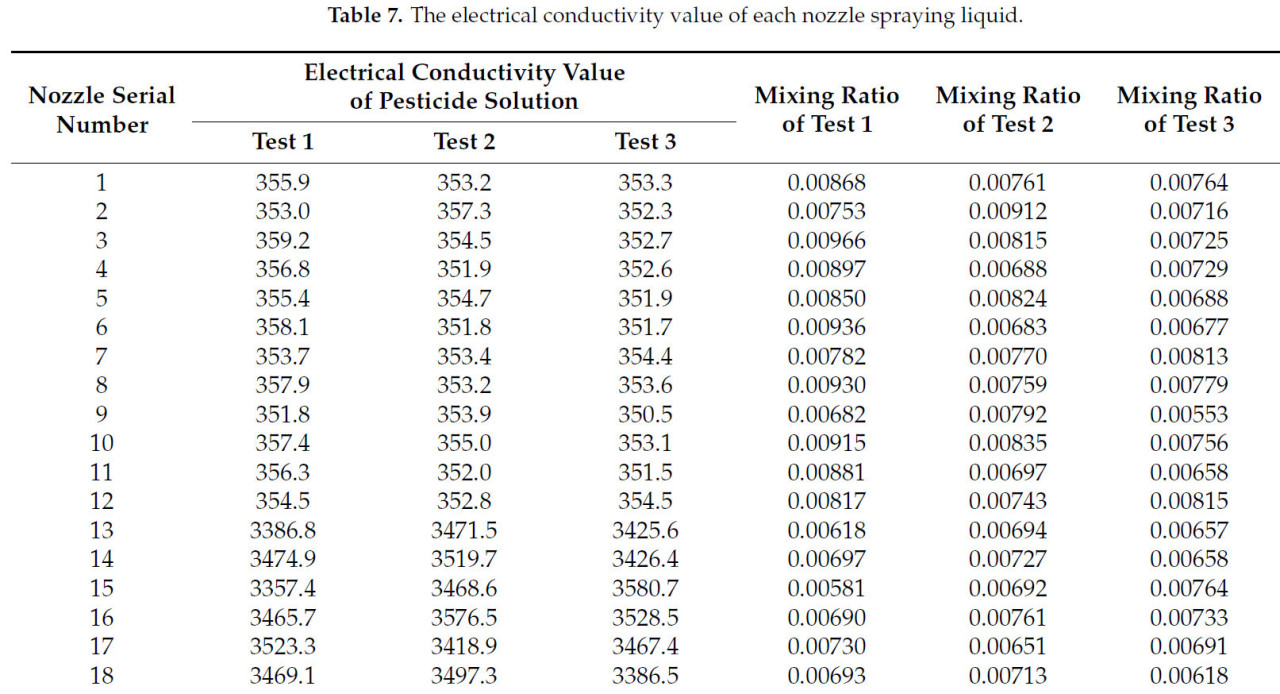
Таблица 7. Значение электропроводности распыляемой жидкости каждого распылителя.
Согласно результатам в таблице 7, можно сделать вывод, что коэффициент равномерности вариации коэффициента смешивания исходного раствора фомезофена и исходного раствора глифосата в испытании 1 составил 9,4% и 7,7% соответственно. В испытании 2 коэффициент равномерности вариации коэффициента смешивания исходного раствора фомезофена и исходного раствора глифосата составил 8,4% и 4,8% соответственно. В испытании 3 коэффициент равномерности вариации коэффициента смешивания исходного раствора фомезофена и исходного раствора глифосата составил 9,7% и 7,2% соответственно.
Полученные результаты представлены на рисунке 11. Максимальный коэффициент вариации равномерности смешивания в трех испытаниях составил 9,7%, при этом общий коэффициент вариации оставался ниже 10%. Следовательно, этот вывод подтверждает высокий уровень равномерности смешивания, достигнутый разработанной в этом исследовании двухканальной инлайн-системой смешивания с непосредственным впрыском, подтверждая ее пригодность для внесения пестицидов в режиме полосного совместного возделывания кукурузы и сои.
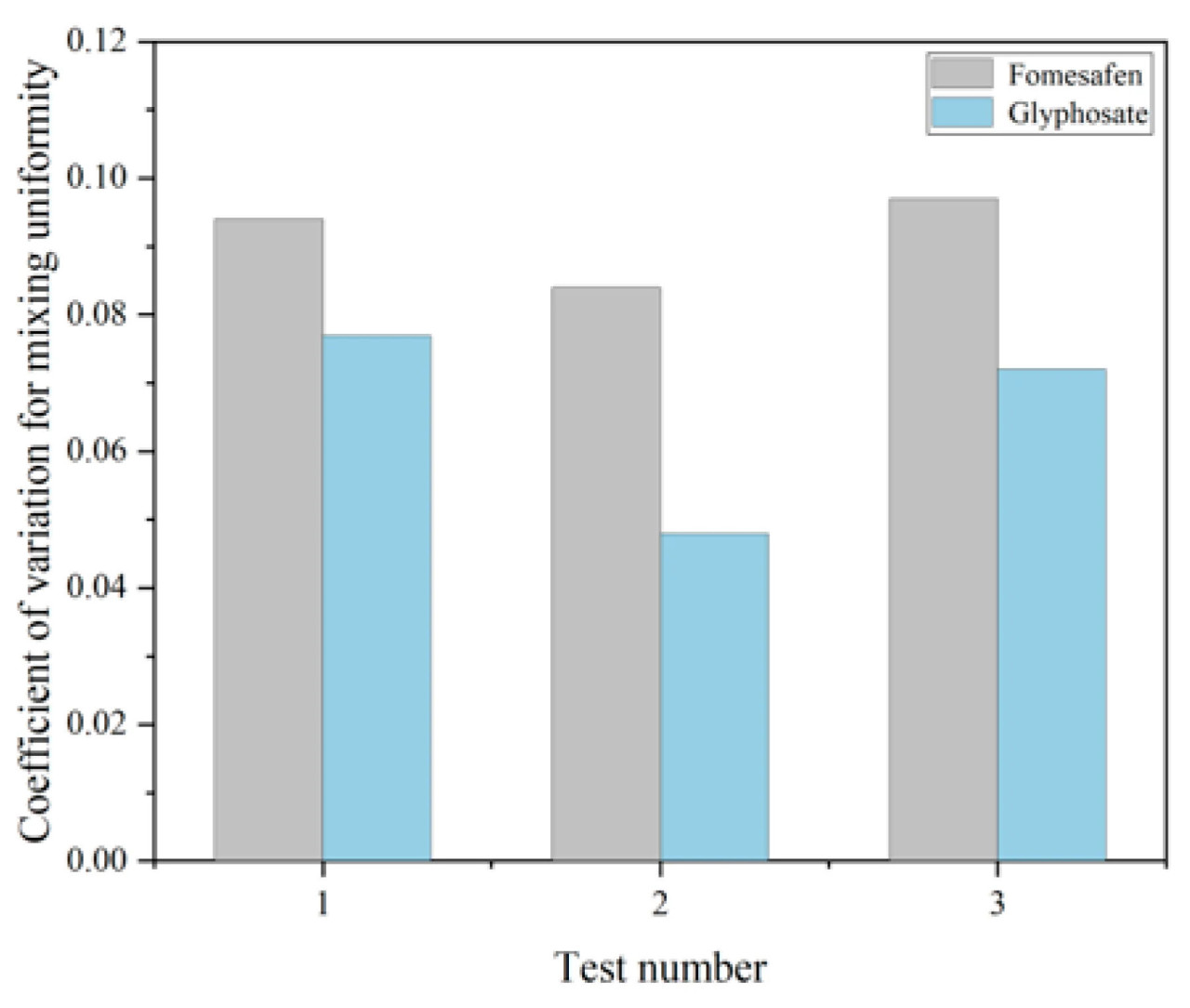
Рисунок 11. Коэффициент вариации равномерности коэффициента смешивания пестицидов по результатам трех испытаний.
3.2. Испытание на стабильность регулировки коэффициента смешивания двухканальной инлайн-системы смешивания
Испытание на стабильность регулировки коэффициента смешивания было проведено на опрыскивателе, оснащенном двухканальной инлайн-системой смешивания с непосредственным впрыском. Испытательными материалами были исходные растворы фомезофена и глифосата, приготовленные, как описано в разделе 3.1, при этом насос поддерживался на нормальном рабочем режиме. Конкретная процедура испытания включала установку целевого коэффициента смешивания двух препаратов пестицидов на 1:50 и последующее его уменьшение до 1:170; знаменатель коэффициента смешивания проверялся с интервалом 40. Когда работает только насос, коэффициент смешивания приближается к нулю. При активации насоса пестицида компонент хранения жидкости оказывается под давлением, и система управления инлайн-смешиванием регулирует отверстие электрического регулирующего клапана для достижения целевого коэффициента смешивания. Мониторинг расхода водного растворителя и расхода жидкости по одному каналу в реальном времени осуществлялся с помощью датчика расхода водного растворителя и высокоточного турбинного расходомера, что позволяло рассчитывать коэффициент смешивания в реальном времени. На основе отклонения между коэффициентом смешивания в реальном времени и целевым коэффициентом отверстие электрического регулирующего клапана динамически регулируется для поддержания коэффициента смешивания в реальном времени на желаемом уровне. Здесь β представляет коэффициент смешивания смешанного пестицида. Всего было проведено пять испытаний, каждое продолжительностью примерно 80 с. Результаты представлены на рисунке 12.
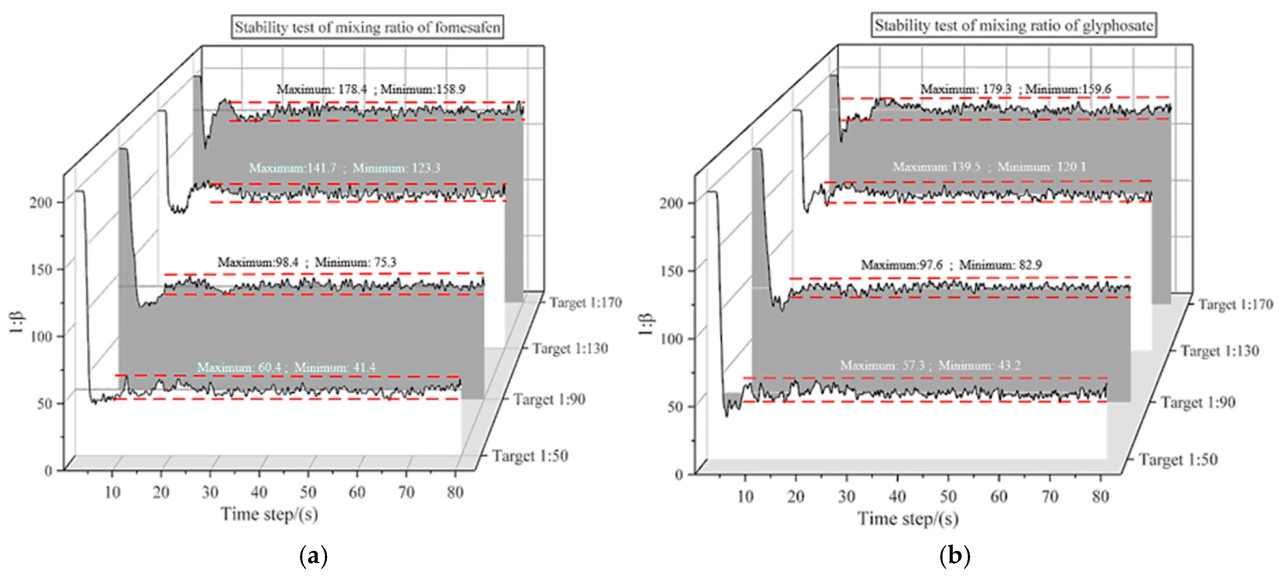
Рисунок 12. Результаты испытания на стабильность коэффициента смешивания пестицидов: (a) испытание на стабильность коэффициента смешивания фомезофена; (b) испытание на стабильность коэффициента смешивания глифосата.
Результаты, полученные в ходе испытания на стабильность коэффициента смешивания, были проанализированы и обработаны, получены среднее значение, стандартное отклонение и среднее изменение данных после того, как коэффициент смешивания в реальном времени стабилизировался вблизи целевого коэффициента. Эти результаты представлены в таблице 8. Среднее значение коэффициента смешивания отклонялось от целевого значения не более чем на 1,5%, с максимальным средним отклонением 1,45%. Общая тенденция показала снижение. Это явление можно объяснить использованием алгоритма нечеткого ПИД-регулирования для управления сигналом 1:β; по мере увеличения коэффициента смешивания параметры настройки нечеткого ПИД-регулятора остаются неизменными, что приводит к уменьшению среднего отклонения по мере уменьшения коэффициента смешивания β. Максимальное стандартное отклонение составило 3,63, что составляет примерно 2,2% от среднего значения. Стабильность коэффициента смешивания была удовлетворительной, соответствуя критериям эксплуатационных характеристик для инлайн-смешивания в контексте применения опрыскивателей.
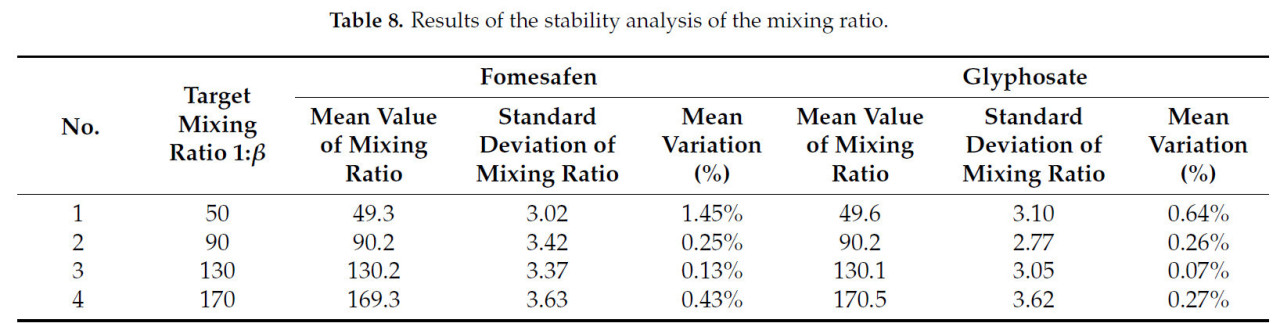
Таблица 8. Результаты анализа стабильности коэффициента смешивания.
3.3. Испытания на точность и время отклика регулировки коэффициента смешивания двухканальной инлайн-системы смешивания
Точность регулировки коэффициента смешивания и время отклика были оценены для опрыскивателя, оснащенного двухканальной инлайн-системой смешивания с непосредственным впрыском. Испытательные материалы включали исходные растворы фомезофена и глифосата, приготовленные, как описано в разделе 3.1, при этом насос работал на стандартном рабочем режиме. Процедура испытаний была следующей: целевые коэффициенты смешивания двух пестицидов устанавливались с шагом знаменателя 40 в диапазоне от 1:40 до 1:160, всего было проведено три испытания. Первоначально система управления инлайн-смешиванием начинала работу через 25 с после запуска водяного насоса. Коэффициент смешивания в реальном времени рассчитывался на основе данных от датчика расхода водного растворителя и высокоточного турбинного расходомера, которые отслеживали расход водного растворителя по одному каналу и расход пестицида. В соответствии с сигналом коэффициента смешивания в реальном времени отверстие электрического регулирующего клапана динамически регулировалось для обеспечения соответствия фактического коэффициента смешивания целевому коэффициенту в реальном времени. Каждое из трех испытаний, где β представлял коэффициент смешивания пестицида, длилось примерно 42 с. Результаты представлены на рисунке 13.
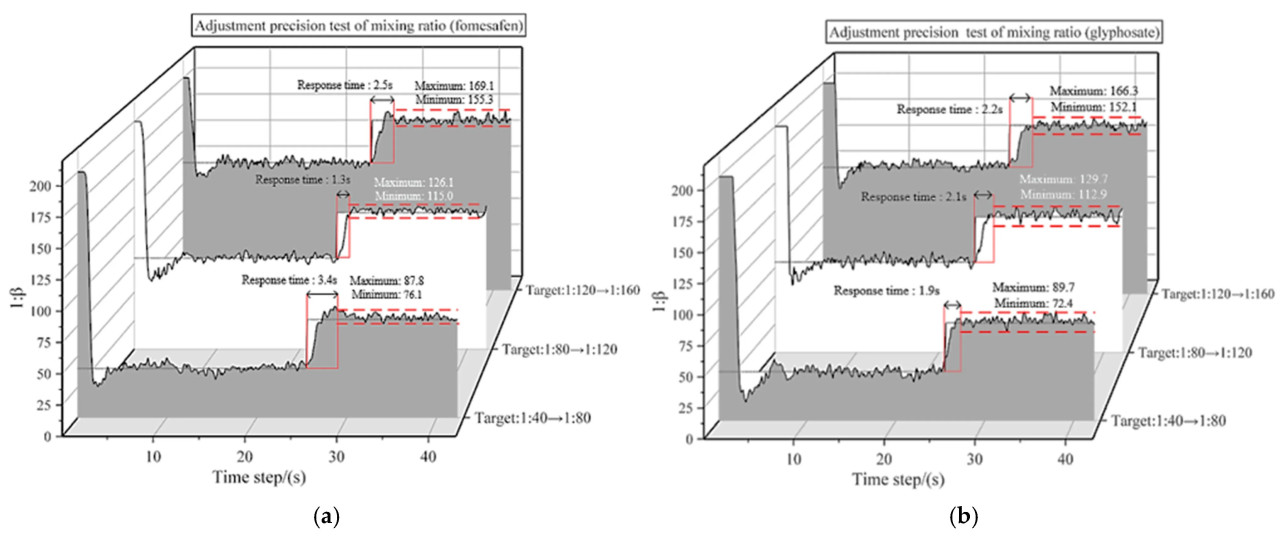
Рисунок 13. Результаты испытаний на точность и время отклика коэффициента смешивания пестицидов: (a) испытание точности регулировки коэффициента смешивания фомезофена; (b) испытание точности регулировки коэффициента смешивания глифосата.
Результаты испытаний на точность и время отклика коэффициента смешивания были проанализированы и обработаны. Среднее значение, стандартное отклонение, среднее отклонение и время отклика для коэффициента смешивания в реальном времени и целевого коэффициента смешивания были получены после того, как разница знаменателей стала менее 5. Результаты анализа представлены в таблице 9. Среднее значение коэффициента смешивания отклонялось от целевого значения менее чем на 2,7%, что показывает высокий уровень точности регулировки. Максимальное стандартное отклонение составило 3,18, что составляло примерно 2% от среднего значения, что свидетельствует о хорошей стабильности. Несмотря на применение фильтра с ограничением среднего значения, некоторый шум оставался из-за того, что MCU собирал выходной сигнал напряжения модуля обнаружения коэффициента смешивания посредством АЦП-преобразования. Время отклика для всех трех испытаний было менее 3,4 с, что было достаточно мало, чтобы соответствовать требованиям к производительности инлайн-системы смешивания пестицидов, используемой в режиме полосного совместного возделывания кукурузы и сои.

Таблица 9. Результаты анализа точности и времени отклика коэффициента смешивания.
4. Обсуждение
Из-за различных требований к пестицидам в режиме полосного совместного возделывания кукурузы и сои традиционные методы распыления, которые чередуются между двумя лентами культур во времени, представляют несколько проблем, включая снижение эффективности, неблагоприятное воздействие на рост культур и потери раствора пестицида. Это исследование было направлено на разработку двухканальной инлайн-системы смешивания с непосредственным впрыском, адаптированной для совместного возделывания кукурузы и сои, обеспечивающей одновременное и полное внесение пестицидов. Используя высокоточный сбор данных с датчиков, определялся коэффициент смешивания в реальном времени, и для обеспечения точного управления скоростью потока впрыска использовалось нечеткое ПИД-регулирование для достижения регулировки электрического регулирующего клапана в реальном времени. Разработанная двухканальная инлайн-система смешивания с непосредственным впрыском была интегрирована и установлена, а полевые испытания были проведены с использованием существующего самоходного опрыскивателя нашей команды в качестве испытательной платформы, что подтвердило эксплуатационные характеристики разработанной системы.
Ключевые выводы этого исследования включают следующее:
(1) Используя передатчик электропроводности DDS-11A, были проведены предварительные эксперименты для получения математической модели для значений электропроводности смесей фомезофена и глифосата.
(2) На основе традиционной одноканальной инлайн-системы смешивания пестицидов двухканальная инлайн-система смешивания пестицидов с непосредственным впрыском была расширена, чтобы охватить весь спектр операций по распылению пестицидов. Используя алгоритм нечеткого ПИД-регулирования, мы разработали систему управления и принципы для двухканальной инлайн-системы смешивания с непосредственным впрыском, включая ее схему физического подключения и блок-схему управления. После разработки метода расчета данных о коэффициенте смешивания в реальном времени с использованием сигналов потока мы провели испытание на согласованность распыления для проверки осуществимости двухканальной инлайн-системы смешивания с непосредственным впрыском.
(3) Разработанный модуль двухканального инлайн-смешивания с непосредственным впрыском был интегрирован в высотно-очищенный самоходный опрыскиватель 3WPG-300, который послужил испытательной платформой для полевых испытаний. Было проведено несколько групп испытаний для обеспечения равномерности смешивания и точности управления коэффициентом смешивания. Максимальный коэффициент вариации коэффициента смешивания составил 9,7%, что показывает хорошую равномерность смешивания. Максимальное стандартное отклонение коэффициента смешивания составляло примерно 2,2%, с максимальным средним отклонением менее 1,5%, что демонстрирует отличную стабильность при регулировке коэффициента смешивания. Когда целевой коэффициент смешивания был установлен как ступенчатый сигнал, максимальное среднее отклонение оставалось ниже 2,7%, а максимальное время отклика составило 3,4 с, что подтверждает, что коэффициент смешивания может регулироваться точно и быстро.
Из-за необходимости точного управления электрическим регулирующим клапаном на основе расхождения между целевым коэффициентом смешивания и коэффициентом смешивания в реальном времени крайне важно проводить обнаружение информации о коэффициенте смешивания в реальном времени и обеспечивать скорость и точность регулировки электрического регулирующего клапана. Разница в коэффициенте смешивания служила входным сигналом для системы управления, и для достижения управления коэффициентом смешивания в реальном времени использовался метод нечеткого ПИД-регулирования. Учитывая, что характеристика «давление-расход-открытие» электрического регулирующего клапана является нелинейной, нечеткий ПИД-регулятор может гибко адаптировать стратегию управления, тем самым лучше приспосабливаясь к изменениям динамического поведения системы и повышая точность и стабильность регулировки коэффициента смешивания.
5. Выводы
(1) Была разработана двухканальная инлайн-система смешивания пестицидов с непосредственным впрыском для удовлетворения требований полосного совместного возделывания кукурузы и сои. Эта система позволяет одновременно вносить пестициды для обеих культур, тем самым повышая эффективность и удобство операций по борьбе с сорняками и значительно сокращая потери пестицидов. Посредством калибровки мы установили связь между коэффициентом смешивания и электропроводностью гербицидов, обычно используемых на полях кукурузы и сои. Кроме того, мы разработали систему управления и блок-схему управления для двухканальной инлайн-системы смешивания с непосредственным впрыском. Экспериментальная проверка подтвердила осуществимость расчета коэффициента смешивания в реальном времени по данным расхода водного растворителя и расхода впрыска пестицида, собранным высокоточными датчиками расхода.
(2) Для повышения удобства установки и минимизации занимаемого пространства модуль впрыска и смешивания пестицидов в разработанной двухканальной инлайн-системе смешивания пестицидов с непосредственным впрыском был интегрирован, и была реализована оптимизированная общая схема трубопроводов. После интеграции модуль впрыска и смешивания пестицидов сохранил только необходимые выходные и входные порты. Используя разработанный нашей командой высотно-очищенный самоходный опрыскиватель 3WPG-300 в качестве испытательной платформы, была установлена разработанная двухканальная инлайн-система смешивания с непосредственным впрыском, а исходная конфигурация трубопроводов и положение распылителей были адаптированы в соответствии с агрономическими требованиями полосного совместного возделывания кукурузы и сои. Испытания на согласованность распыления показали, что максимальный коэффициент вариации равномерности объема распыления для 18 распылителей составил 5,96%, что показывает отличную согласованность распыления. Испытания на равномерность смешивания подтвердили, что максимальный коэффициент вариации равномерности смешивания по коэффициенту впрыска пестицида составил 9,7%, что демонстрирует удовлетворительную равномерность смешивания. Следовательно, разработанная двухканальная инлайн-система смешивания пестицидов с непосредственным впрыском соответствует основным требованиям к внесению пестицидов в сельскохозяйственной технике.
(3) Была разработана стратегия управления для двухканальной инлайн-системы смешивания пестицидов, а ее стабильность, точность и время отклика были оценены с использованием опрыскивателя, оснащенного двухканальной инлайн-системой смешивания с непосредственным впрыском. Результаты испытания на стабильность показали, что максимальное стандартное отклонение коэффициента смешивания составляло примерно 2,2%, в то время как максимальное среднее отклонение было менее 1,5%. Эти выводы подтверждают, что стабильность коэффициента смешивания является удовлетворительной и соответствует эксплуатационным требованиям инлайн-системы смешивания опрыскивателя в полевых условиях. Из испытаний на точность регулировки и время отклика было отмечено, что когда целевой коэффициент смешивания следовал ступенчатому сигналу, максимальное среднее отклонение коэффициента смешивания было менее 2,7%, а максимальное время отклика составило 3,4 с. Как среднее отклонение, так и время отклика уменьшались по мере уменьшения целевого коэффициента смешивания. Следовательно, эти результаты подтверждают, что разработанная двухканальная инлайн-система смешивания пестицидов может удовлетворить требованиям стабильной, точной и быстрой регулировки коэффициента смешивания пестицидов, необходимым технике защиты растений в режиме полосного совместного возделывания кукурузы и сои, демонстрируя отличную рабочую производительность.
(4) Основываясь на вышеупомянутых выводах, будущие исследования будут сосредоточены на повышении производительности инлайн-системы смешивания пестицидов, используемой в режиме полосного совместного возделывания кукурузы и сои. В частности, усилия будут направлены на проектирование высокопроизводительной инлайн-системы смешивания пестицидов, оптимизацию выбора исполнительного устройства, уточнение рабочих принципов системы и продвижение технологии обнаружения коэффициентов смешивания пестицидов. Потенциальные подходы включают использование алгоритмов управления, интегрированных с искусственными нейронными сетями, или использование методов обработки изображений для мониторинга коэффициентов смешивания и равномерности в реальном времени. Эти улучшения направлены на значительное повышение стабильности, точности и скорости регулировки коэффициентов смешивания.
Ссылки
1. Čerkasova, N.; White, M.; Arnold, J.; Bieger, K.; Allen, P.; Gao, J.; Gambone, M.; Meki, M.; Kiniry, J.; Gassman, P.W. Field scale SWAT+ modeling of corn and soybean yields for the contiguous United States: National Agroecosystem Model Development. Agric. Syst. 2023, 210, 103695. [Google Scholar] [CrossRef]
2. Grassini, P.; Torrion, J.; Cassman, K.; Yang, H.S.; Specht, J.E. Drivers of spatial and temporal variation in soybean yield and irrigation requirements in the western US Corn Belt. Field Crops Res. 2014, 163, 32–46. [Google Scholar] [CrossRef]
3. Wang, G.; Feng, S.; Han, X.; Zheng, H.; Bai, C.; Li, G.; Zhao, G. Response of rhizosphere microbial community structure and production performance of corn and soybean to belt planting mode. Front. Sustain. Food Syst. 2024, 8, 1387728. [Google Scholar] [CrossRef]
4. Wang, F. Application and extension of high yield planting technology of soybean and corn belt. Seed World 2024, 11, 105–107. [Google Scholar]
5. Wu, J.; Yan, B. Stable grain guarantee to see 5 counties how to fight spring ploughing. Bazhong Daily, 17 March 2022. [Google Scholar] [CrossRef]
6. Griffith, D.; Parsons, S.; Mannering, J. Mechanics and adaptability of ridge-planting for corn and soya bean. Soil Tillage Res. 1990, 18, 113–126. [Google Scholar] [CrossRef]
7. Kheam, S.; Rubene, D.; Markovic, D.; Ith, S.; Uk, O.; Soung, S.; Ninkovic, V. The effects of cultivar mixtures on insect pest and natural enemy abundance, diseases, and yield in tropical soybean cropping system. Biol. Control 2024, 196, 105571. [Google Scholar] [CrossRef]
8. Glaser, J.; Matten, S. Sustainability of insect resistance management strategies for transgenic Bt corn. Biotechnol. Adv. 2003, 22, 45–69. [Google Scholar] [CrossRef] [PubMed]
9. Cui, H.; Sciligo, A.; Tan, X.; Hui, C.; Zhang, Y.; Li, W.; Zhou, Z.-Q.; Peng, Z.-Q.; Ma, P.; Xiao, Z.-S.; et al. Dynamic trends in maize diseases and pests across six regions in China over two decades. Crop Prot. 2024, 186, 106930. [Google Scholar] [CrossRef]
10. Zhang, Z. Practice and reflection on the extension of soybean and corn belt composite planting technology. Agric. Dev. Equip. 2024, 06, 172–174. [Google Scholar]
11. Gan-Mor, S.; Matthews, G. Recent developments in sprayers for application of biopesticides—An overview. Biosyst. Eng. 2003, 84, 119–125. [Google Scholar] [CrossRef]
12. Chen, Y.; Chen, Y.; Guo, P.; Zhang, S.; Jin, H.; Adilet, S.; Chen, J. Design and experimentation of direct injection in-line mixing control system for sprayers. Comput. Electron. Agric. 2024, 226, 109304. [Google Scholar] [CrossRef]
13. Jiang, X.; Wang, Z.; Bai, X.; Xiong, F.; Li, D. Design and Experiment of injection-type Intelligent Online Mixing Pesticide Control System. In Proceedings of the 2019 IEEE 2nd International Conference on Automation, Electronics and Electrical Engineering (AUTEEE), Shenyang, China, 22–24 November 2019; pp. 379–384. [Google Scholar]
14. Han, Z. Design and Experiment of on-Line Mixing System of Sprayer for Soybean and Corn Strip Compound Planting. Master’s Thesis, Jiangsu University, Zhenjiang, China, 2022. [Google Scholar] [CrossRef]
15. Dai, X.; Xu, Y.; Chen, J.; Zheng, J.; Song, H.; Ma, L. Improved jet mixer injection nozzle enhancing pesticide mixing uniformity and dynamic concentration consistency. Trans. Chin. Soc. Agric. Eng. 2019, 35, 65–74. [Google Scholar]
16. Sun, D.; Liu, W.; Li, Z.; Zhan, X.; Dai, Q.; Xue, X.; Song, S. Numerical experiment and optimized design of pipeline spraying on-line pesticide mixing apparatus based on CFD orthogonal experiment. Agronomy 2022, 12, 1059. [Google Scholar] [CrossRef]
17. Qiu, B.; Ma, J.; Deng, B.; Ou, M.; Dong, X. Experiment on mixing performance of on-line mixing spray system. Trans. Chin. Soc. Agric. Eng. 2014, 30, 78–85. [Google Scholar]
18. Wu, X.; Zhang, Y.; Du, P.; Xu, J.; Dong, F.; Liu, X.; Zheng, Y. Impact of fomesafen on the soil microbial communities in soybean fields in Northeastern China. Ecotoxicol. Environ. Saf. 2018, 148, 169–176. [Google Scholar] [CrossRef] [PubMed]
19. Fazal, A.; Yang, M.; Wang, X.; Lu, Y.; Yao, W.; Luo, F.; Han, M.; Song, Y.; Cai, J.; Yin, T.; et al. Discrepancies in rhizobacterial assembly caused by glyphosate application and herbicide-tolerant soybean Co-expressing GAT and EPSPS. J. Hazard. Mater. 2023, 450, 131053. [Google Scholar] [CrossRef] [PubMed]
20. Cao, S.; Zou, Y.; Zhang, S.; Zhang, H.; Guan, Y.; Liu, L.; Ji, M. Investigation of resistance mechanisms to Fomesafen in Ipomoea nil from China. Pestic. Biochem. Physiol. 2023, 194, 105487. [Google Scholar] [CrossRef]
21. Boretti, A. Comprehensive risk-benefit assessment of chemicals: A case study on glyphosate. Toxicol. Rep. 2024, 13, 101803. [Google Scholar] [CrossRef]
22. Li, W.; Wang, K.; Wang, P.; Yang, P.; Xu, S.; Tong, J.; Zhang, Y.; Yang, Y.; Han, L.; Ye, M.; et al. Impact of Glyphosate on Soil Bacterial Communities and Degradation Mechanisms in Large-Leaf Tea Plantations. J. Hazard. Mater. 2024, 483, 136626. [Google Scholar] [CrossRef]
23. Carvalho, F.; Antuniassi, U.; Chechetto, R.; Mota, A.; Jesus, M.; Carvalho, L. Viscosity, surface tension and droplet size of sprays of different formulations of insecticides and fungicides. Crop. Prot. 2017, 101, 19–23. [Google Scholar] [CrossRef]
24. Takamura, K.; Fischer, H.; Morrow, N. Physical properties of aqueous glycerol solutions. J. Pet. Sci. Eng. 2012, 98, 50–60. [Google Scholar] [CrossRef]
25. Hammadi, A. Electrical conductance, density, and viscosity in mixtures of alkali-metal halides and glycerol. Int. J. Thermophys. 2004, 25, 89–111. [Google Scholar] [CrossRef]
26. Golnabi, H.; Matloob, M.; Bahar, M.; Sharifian, M. Investigation of electrical conductivity of different water liquids and electrolyte solutions. Iran. Phys. J. 2009, 3-2, 24–28. [Google Scholar]
27. Zhang, Z.; Zhu, H.; Guler, H.; Shen, Y. Improved premixing in-line injection system for variable-rate orchard sprayers with Arduino platform. Comput. Electron. Agric. 2019, 162, 389–396. [Google Scholar] [CrossRef]
28. Dai, X.; Xiao, J.; Xu, Y.; Song, H. Flow characteristics and control method for solenoid valve controlled target spraying under dynamic conditions. Jiangsu J. Agric. Sci. 2019, 35, 476–483. [Google Scholar]
29. Yang, Y.; Wang, G.; Zhai, X.; Tao, D.; Wu, T.; Cui, Y. Experimental study on performance of on-line detection device for mixed drug concentration based on linear CCD. J. Chin. Agric. Mech. 2019, 10, 142–146. [Google Scholar]
30. Dai, X.; Xu, Y.; Zheng, J.; Ma, L.; Ding, F.; Guo, C. Analysis Method and Experiments of Inline Mixing Water Dispersible Granules Pesticides Based on 3D Image Reconstruction. Trans. Chin. Soc. Agric. Mach. 2020, 51, 98–107. [Google Scholar]
31. Dai, X.; Xu, Y.; Song, H.; Chen, J.; Kuang, L.; Ma, L. Mixing Uniformity Analysis Methods and In-line Mixing Experimentsof Mixer under Variable Working Conditions. Trans. Chin. Soc. Agric. Mach. 2018, 49, 172–179. [Google Scholar]
32. Zhou, L.; Hu, C.; Chen, Y.; Guo, P.; Zhang, L.; Liu, J.; Chen, Y. Research and Experiment on Cruise Control of a Self-Propelled Electric Sprayer Chassis. Agriculture 2024, 14, 902. [Google Scholar] [CrossRef]
33. Lu, L.; Zhang, J.; Chen, J.; Chen, Y.; Hu, C.; Cao, J. Optimized design of the high clearance sprayer chassis suspension consideringtank liquid shaking. Trans. Chin. Soc. Agric. Eng. 2023, 39, 15–25. [Google Scholar]
34. Chen, Y.; Lu, L.; Zhang, J.; Chen, J.; Hu, C.; Cao, J. Construction and Application of Equivalent Mechanical Model of Liquid Longitudinal Sloshing in Sprayer Tank. Trans. Chin. Soc. Agric. Mach. 2023, 54, 173–182+195. [Google Scholar]
35. Zhou, L.; Hu, C.; Chen, Y.; Guo, P.; Liu, J.; Chen, Y.; Cao, J. Research on a Chassis Stability Control Method for High-Ground-Clearance Self-Propelled Electric Sprayers. Appl. Sci. 2024, 14, 7734. [Google Scholar] [CrossRef]

Zhang Z, Guo P, Ma H, Chen Y, Chen Y. Experimental Investigation of Dual-Path Inline Mixing System for Sprayers in Corn-Soybean Strip Intercropping Mode. Agriculture. 2025; 15(3):247. https://doi.org/10.3390/agriculture15030247
Перевод статьи «Experimental Investigation of Dual-Path Inline Mixing System for Sprayers in Corn-Soybean Strip Intercropping Mode» авторов Zhang Z, Guo P, Ma H, Chen Y, Chen Y., оригинал доступен по ссылке. Лицензия: CC BY. Изменения: переведено на русский язык

















































































































Комментарии (0)