Как научить сельхозтехнику точно поворачивать на кривых участках: улучшенный метод упреждающего слежения
В современных исследованиях отслеживания траектории основное внимание уделяется совершенствованию алгоритмов управления, таких как адаптивные и прогностические модели, для повышения точности и стабильности отслеживания. Чтобы решить проблему низкой точности следования по траекториям с переменной кривизной при автоматической навигации в сельскохозяйственных условиях, в данном исследовании предлагается метод слежения по траектории на основе нечеткого управления.
Аннотация
Во-первых, модель чистого преследования и кинематическая модель были созданы на основе конструкции с независимым рулевым управлением всех четырех колес и независимым приводом всех четырех колес (4WIS-4WID). Во-вторых, был разработан нечеткий регулятор с тремя входами и одним выходом, использующий в качестве входных переменных боковое отклонение (de), угловое отклонение курса (θe) и степень изогнутости (c) предстоящего участка пути. Путем многократных симуляций и корректировок было разработано 75 правил управления. Упреждающее расстояние (Ld) было получено в результате процессов фазификации, нечеткого вывода и дефазификации. Далее была построена функция управления скоростью на основе отклонений положения сельхозмашины и степени изогнутости предстоящего пути для обеспечения регулируемой скорости. Наконец, были проведены полевые испытания для проверки эффективности предложенного метода слежения по траектории. Результаты эксперимента по отслеживанию двух типов траекторий показывают, что при стратегии динамического упреждающего расстояния с переменной скоростью средние боковые отклонения для путей с переменной кривизной составили 1,8 см и 3,3 см, в то время как максимальные боковые отклонения достигли 10,1 см и 10,5 см соответственно. По сравнению с моделью чистого преследования с фиксированным упреждением и постоянной скоростью, на U-образной траектории среднее боковое отклонение было снижено на 56,1%, а максимальное — на 50,4%. На S-образной траектории среднее боковое отклонение было снижено на 56,0%, а максимальное — на 58,9%. Предложенный метод эффективно повышает точность слежения по траекториям с переменной кривизной для сельскохозяйственной техники, удовлетворяя производственным требованиям к криволинейным операциям в сельскохозяйственных условиях.
1. Введение
Управление отслеживанием траектории является ключевым компонентом для реализации технологии автоматической навигации сельскохозяйственной техники [1,2,3]. Традиционные траектории полевых работ в основном являются прямыми линиями, что обусловило обширные исследования по отслеживанию прямолинейных траекторий [4,5,6]. Однако при работе на криволинейных траекториях, особенно с переменной кривизной, изменения кривизны часто приводят к низкой эффективности отслеживания. Это проявляется в значительных боковых отклонениях, снижении стабильности отслеживания, сильных колебаниях и других связанных проблемах [7,8], вызывая существенно недостаточную обработку почвы и неполную уборку урожая. В реальных сельскохозяйственных условиях траектории с переменной кривизной широко распространены [9,10,11], и крайне важно повысить точность отслеживания траектории сельскохозяйственной техникой на траекториях с переменной кривизной, чтобы лучше соответствовать требованиям механизированного и автономного производства.
Модель управления чистым преследованием (pure-pursuit) представляет собой геометрический метод управления отслеживанием траектории, который имитирует ручное вождение и широко используется в системах автоматической навигации сельскохозяйственной техники [12,13,14,15,16]. Выбор упреждающего расстояния Ld напрямую влияет на эффективность отслеживания траектории модели pure-pursuit. В связи с этим многие ученые провели обширные исследования по динамической регулировке упреждающего расстояния. Чжан и др. [17] использовали алгоритм оптимизации роя частиц для динамического определения упреждающего расстояния на основе боковых ошибок отслеживания в реальном времени, тем самым улучшив точность отслеживания прямолинейной траектории при автоматической навигации трактора; Сюй и др. [18] использовали отклонение положения сельхозтехники в качестве входного сигнала для нечеткого регулятора для адаптивной регулировки упреждающего расстояния и подтвердили осуществимость своего метода, используя прототип с независимым рулевым управлением всех четырех колес и независимым приводом всех четырех колес (4WIS-4WID). Однако оба исследования упустили из виду такие факторы, как степень изогнутости траектории и скорость, которые существенно влияют на точность отслеживания траектории, что приводит к низкой эффективности при отслеживании траекторий с переменной кривизной.
Некоторые ученые провели исследования по отслеживанию криволинейных траекторий. Ву и др. [19] предложили стратегию управления pure-pursuit, в которой упреждающее расстояние адаптивно изменяется на основе текущей скорости и степени изогнутости эталонной траектории, и были направлены на точную настройку упреждающего расстояния с помощью алгоритмов оптимизации для различных рабочих условий. Однако этот подход не учитывал влияние отклонения кузова транспортного средства на отслеживание траектории с переменной кривизной. Нагасака и др. [20], предполагая фиксированный радиус поворота, использовали угловые ошибки курса для обеспечения отслеживания траектории разворота в конце гона для сельскохозяйственной техники. Однако из-за ограниченного количества параметров принятия решений этот метод показывал значительное перерегулирование в переходных точках между прямыми и криволинейными траекториями. Ан и др. [21] выбирали точки упреждения на основе положения, ориентации и траектории прототипа и размещали точки упреждения за пределами траектории, чтобы уменьшить феномен «срезания углов» при отслеживании криволинейной траектории; Ян и др. [22] предложили метод управления отслеживанием криволинейной траектории на основе оптимальной точки упреждения, достигнув средней ошибки отслеживания кривой 6,7 см, когда трактор двигался со скоростью 1 м/с. Однако оба метода не включили скорость в качестве фактора. Эти исследования по динамическому упреждающему расстоянию были сосредоточены на определенных факторах, таких как боковое отклонение, угловое отклонение курса, скорость транспортного средства и степень изогнутости траектории, но ни одно из них не учитывало все четыре фактора в совокупности.
В данной статье рассматриваются беспилотные мобильные платформы, используемые в сельскохозяйственной технике, работающей в холмистой и горной местности, такой как сады и леса. Эти районы часто содержат траектории с переменной кривизной. Чтобы повысить точность отслеживания траектории сельскохозяйственной техникой на таких траекториях, в данной статье предлагается метод отслеживания траектории на основе нечеткого управления, адаптированный для траекторий с переменной кривизной. Боковое отклонение de, угловое отклонение курса θe и степень изогнутости траектории c были введены в нечеткий регулятор для динамической регулировки упреждающего расстояния Ld. Была разработана модель управления скоростью для обеспечения регулировки скорости в реальном времени во время отслеживания траектории. Эксперименты по полевому отслеживанию траектории подтвердили, что предложенный метод эффективно повышает точность отслеживания траектории сельскохозяйственной техникой на траекториях с переменной кривизной. Это исследование направлено на предоставление новых идей и технических ссылок для технологии отслеживания траектории сельскохозяйственной техники.
2. Материалы и методы
2.1. Экспериментальная платформа
2.1.1. Структура
Экспериментальный прототип использовал полностью электрическую механическую структуру 4WIS-4WID с габаритами кузова (длина × ширина × высота) 130 см × 158 см × 66 см. Прототип был в основном собран с использованием стальных труб квадратного сечения 40 мм × 40 мм, с шириной колеи 130 см, колесной базой 100 см и дорожным просветом 55 см. Как показано на Рисунке 1, четыре драйвера (AQMD6015BLS; Chengdu Aikong Electronics Technology Co., Ltd., Чэнду, Китай) независимо управляют соответствующими мотор-колесами (9 дюймов, 24 В), обеспечивая движение прототипа. Четыре рулевых редуктора (DH-03X, 120°/с, 38 Н·м) управляют поворотом каждого ведущего колеса в диапазоне от −90° до 90°. Информация о положении и ориентации прототипа предоставлялась глобальной навигационной спутниковой системой (GNSS) позиционирования (приемник PA-3; Shanghai Huace Navigation Technology Co., Ltd., Шанхай, Китай) и 9-осевым электронным гироскопом (BWT901CL; Shenzhen WitMotion Intelligent Technology Co., Ltd., Шэньчжэнь, Китай) с диапазонами ошибок информации о положении и ориентации ±5 см и ±0,1° соответственно. Главный контроллер (STM32F103ZET6; Guangzhou Xinying Electronic Technology Co., Ltd., Гуанчжоу, Китай) отвечает за прием и обработку данных, а также отправку управляющих команд. Вся система питается от литиевой батареи 24 В, 20 А·ч с полной зарядкой емкостью 480 Вт·ч. Прототип способен нести оборудование для выполнения сельскохозяйственных задач, таких как опрыскивание и уборка урожая. Он может работать как автономно, так и с помощью дистанционного управления, с рабочей скоростью 0,8 м/с и максимальной скоростью 2 м/с. Среднее время автономной работы составляет 2 часа (в настоящее время достаточно для завершения экспериментов; будущие обновления характеристик батареи могут увеличить время автономной работы).

Рисунок 1. Структура экспериментальной платформы: (1) персональный компьютер (ПК); (2) драйвер двигателя; (3) рулевой редуктор; (4) мотор-колесо; (5) GNSS позиционирования; (6) литиевая батарея; (7) главный контроллер; и (8) электронный гироскоп.
2.1.2. Система управления
При отслеживании эталонной траектории ПК получает координатную информацию (x, y) от GNSS позиционирования и угол курса θ от электронного гироскопа. Затем он преобразует информацию о положении и ориентации в боковое отклонение de и угловое отклонение курса θe относительно эталонной траектории. Нечеткий регулятор с тремя входами и одним выходом, а также модель управления скоростью были разработаны на ПК. Для нечеткого регулятора тремя входными сигналами являлись боковое отклонение de, угловое отклонение курса θe и степень изогнутости траектории c, в то время как выходным сигналом было упреждающее расстояние Ld. Выходное упреждающее расстояние Ld от нечеткого регулятора подавалось в модель pure-pursuit для расчета радиуса поворота R прототипа в текущем состоянии отклонения. Впоследствии модель рулевого управления четырех колес Аккермана на низкой скорости рассчитывала углы поворота δ для каждого колеса [23]. Модель управления скоростью рассчитывала текущую скорость транспортного средства v на основе степени бокового отклонения a, степени углового отклонения курса b и степени изогнутости траектории c. Главный контроллер получал углы поворота δ каждого колеса и скорость транспортного средства v, предоставленные ПК. Два энкодера соответственно передавали текущую фактическую скорость vf и фактический угол поворота δf обратно на контроллер, формируя замкнутую систему с двигателями и другими компонентами для обеспечения точности управления. Скорректированные сигналы угла поворота и скорости, отрегулированные с помощью обратной связи замкнутой системы, преобразовывались в сигналы с широтно-импульсной модуляцией (PWM) и подавались соответственно на рулевые редукторы и мотор-колеса, обеспечивая движение и поворот прототипа и завершая управление отслеживанием траектории. Блок-схема системы управления показана на Рисунке 2.
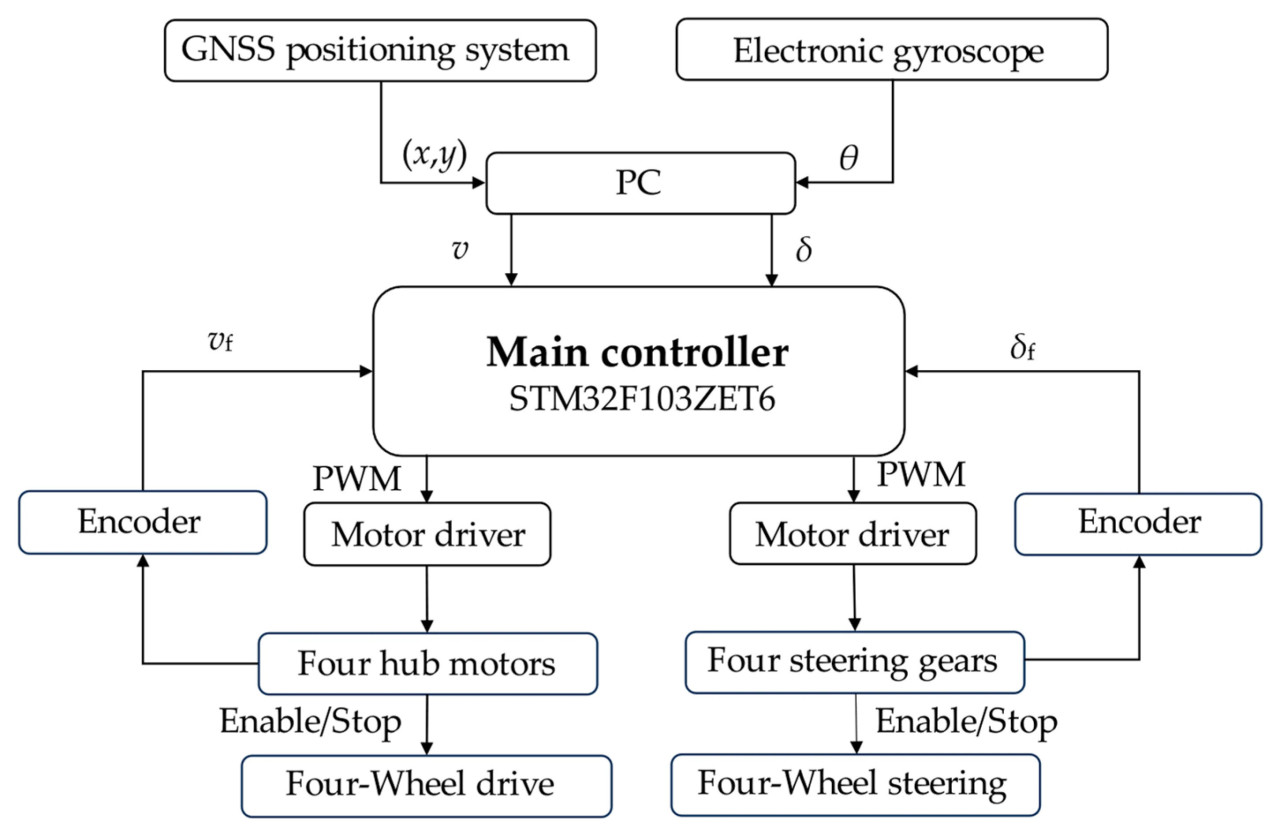
Рисунок 2. Схема системы управления прототипом.
2.2. Улучшенная модель чистого преследования (Pure Pursuit)
2.2.1. Определение отклонения транспортного средства
Управление pure-pursuit представляет собой алгоритм отслеживания траектории, основанный на геометрических принципах. Он вычисляет в реальном времени радиус поворота между текущим положением транспортного средства и упреждающей точкой на эталонной траектории, позволяя транспортному средству следовать желаемой траектории. Улучшенная модель pure-pursuit показана на Рисунке 3.
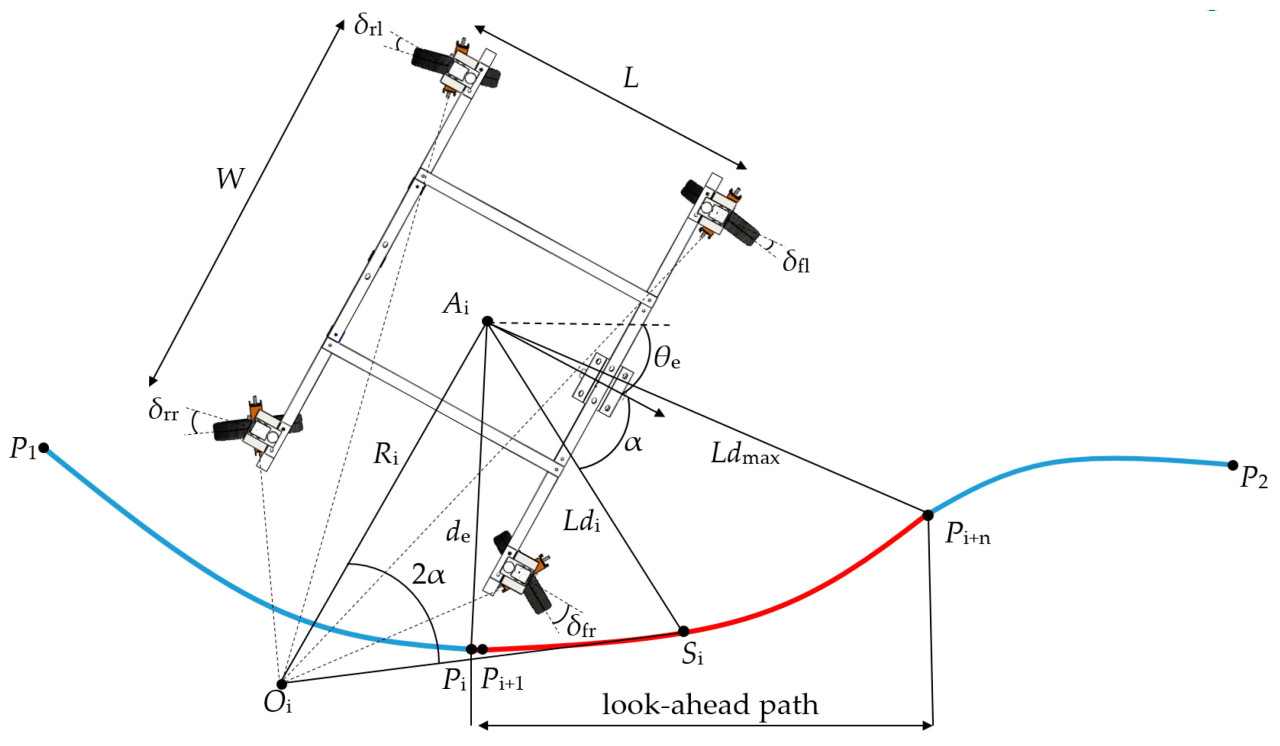
Рисунок 3. Улучшенная модель чистого преследования (Pure Pursuit).
На Рисунке 3 Ai представляет геометрический центр прототипа; P1 и P2 представляют эталонную траекторию, которая состоит из нескольких равноотстоящих дискретных точек; Pi является ближайшей дискретной точкой на траектории к геометрическому центру прототипа; Pi+1 является следующей ближайшей дискретной точкой на траектории к геометрическому центру; Ldmax является предустановленным максимальным упреждающим расстоянием; Pi+n является дискретной точкой на траектории, соответствующей максимальному упреждающему расстоянию Ldmax; боковое отклонение de представляет собой расстояние между геометрическим центром Ai и ближайшей точкой траектории Pi; угловое отклонение курса θe представляет собой угол между направлением движения вперед кузова транспортного средства и отрезком линии Pi Pi+1; Ldi является упреждающим расстоянием; Si является точкой упреждения; а Oi является центром поворота прототипа.
2.2.2. Определение степени изогнутости траектории
Степень изогнутости траектории оказывает значительное влияние на упреждающее расстояние. Чем больше степень изогнутости траектории, тем меньше упреждающее расстояние и выше точность отслеживания. Однако глобальная средняя кривизна траектории не может точно представлять локальную степень изогнутости траектории. Чтобы лучше адаптироваться к изменениям предстоящей траектории, необходимо получить степень изогнутости упреждающей траектории. В этом исследовании упреждающая траектория определяется как сегмент между Pi и Pi+n, где Pi является начальной точкой, а Pi+n является конечной точкой. Мы вычислили прямолинейное расстояние от начальной точки до конечной точки упреждающей траектории и общую сумму расстояний между соседними дискретными точками в пределах упреждающей траектории [24]. Это может быть выражено как:

В уравнении (1): чем ближе c к 1, тем более изогнутой является упреждающая траектория; и наоборот, чем ближе c к 0, тем более прямой является траектория. kc является предустановленным регулировочным коэффициентом. В этом исследовании kc установлен равным 3.
2.2.3. Кинематическая модель транспортного средства
Как показано на Рисунке 3, в ∆Ai Oi Si теорема синусов дает:

В уравнении (2) α представляет угол между направлением движения вперед прототипа и упреждающим расстоянием, рад, а Ri представляет радиус поворота прототипа, м.
В сочетании с моделью поворота всех четырех колес были получены углы поворота каждого колеса:

В уравнении (3) L представляет колесную базу прототипа, м; W представляет ширину колеи прототипа, м; а δfr, δfl, δrr и δrl представляют углы поворота четырех колес прототипа, рад.
Упреждающее расстояние Ld является единственным регулируемым параметром в модели pure-pursuit. Меньшее упреждающее расстояние позволит прототипу быстрее реагировать на изменения траектории, такие как крутые повороты или траектории с высокой скоростью изменения кривизны. Однако это может вызвать частые изменения углов поворота колес, что приведет к менее плавному движению. И наоборот, большее упреждающее расстояние потребует больше времени и расстояния для корректировки траектории прототипом, что приведет к более медленной реакции на криволинейные траектории [25,26]. На упреждающее расстояние влияют боковое отклонение de, угловое отклонение курса θe и степень изогнутости траектории c прототипа. Чтобы динамически регулировать упреждающее расстояние на основе этих факторов, был разработан и интегрирован в систему нечеткий регулятор.
2.3. Разработка нечеткого регулятора
Нечеткий регулятор представляет собой метод интеллектуального управления, основанный на нечеткой логике, который преобразует неопределенности и эмпирические правила в сложных системах в действующие математические модели для достижения точного управления. Он использует теорию нечетких множеств для преобразования лингвистических переменных в числовые операции, тем самым автоматически генерируя управляющие воздействия для оптимизации производительности системы [27,28,29,30].
Используя метод нечеткого управления, упреждающее расстояние динамически регулируется в соответствии с различными условиями, тем самым повышая точность и стабильность отслеживания траектории прототипом и улучшая его адаптируемость к сложным дорожным условиям. Система нечеткого управления показана на Рисунке 4. Для генерации нечетких выходных данных используется метод нечеткого вывода Мамдани, которые затем преобразуются в точные значения с помощью дефазификации. В процессе дефазификации используется метод центроида, который обеспечивает относительно гладкие выходные вычисления.
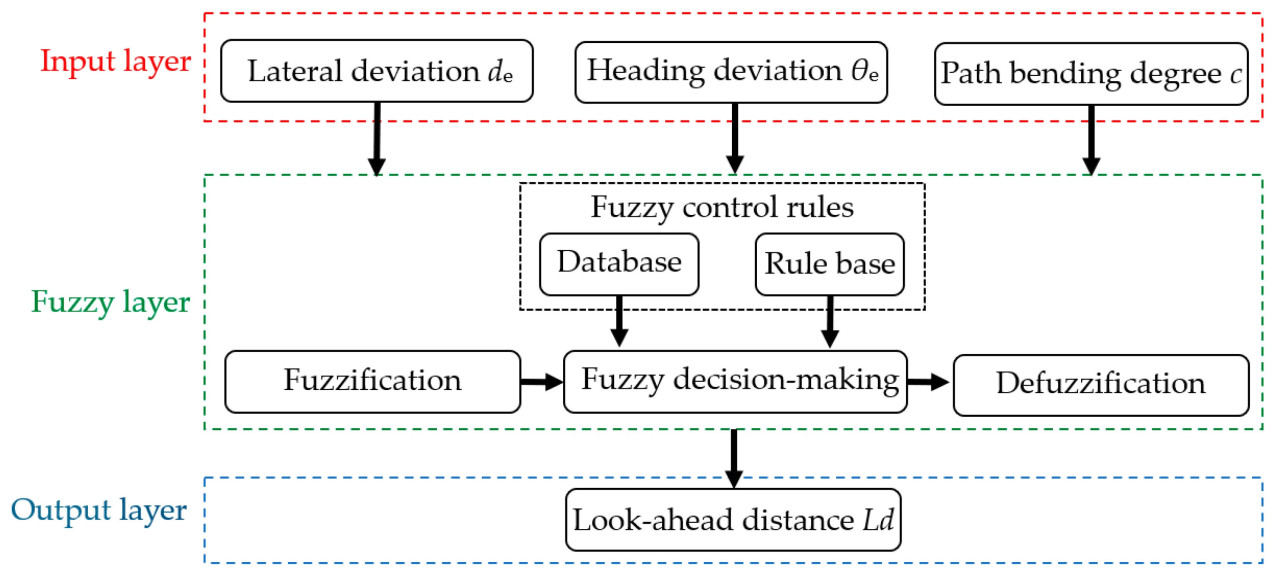
Рисунок 4. Система нечеткого управления.
2.3.1. Входные и выходные переменные
На основе вышеприведенного анализа была применена фазификация к входным и выходным переменным. Диапазон бокового отклонения составлял [−0,3 м, 0,3 м] с пятью уровнями нечеткости: Отрицательная Большая (NB), Отрицательная Малая (NS), Ноль (ZO), Положительная Малая (PS) и Положительная Большая (PB). Диапазон углового отклонения курса составлял [−30°, 30°], также с пятью уровнями нечеткости. Определения знаков для бокового и углового отклонений курса следующие: когда прототип находится на левой стороне от направления движения вперед по эталонной траектории, боковое отклонение положительно; когда он находится на правой стороне, отклонение отрицательно. Угловое отклонение курса было положительным против часовой стрелки и отрицательным по часовой стрелке. Диапазон степени изогнутости траектории составлял [0, 1] с тремя уровнями нечеткости: Малая (S), Средняя (M) и Большая (B). Если входные значения превышали границы диапазона, они устанавливались на граничные значения. Диапазон упреждающего расстояния составлял [0,5 м, 2,5 м] с пятью уровнями нечеткости. Функции принадлежности для входных и выходных переменных показаны на Рисунке 5.
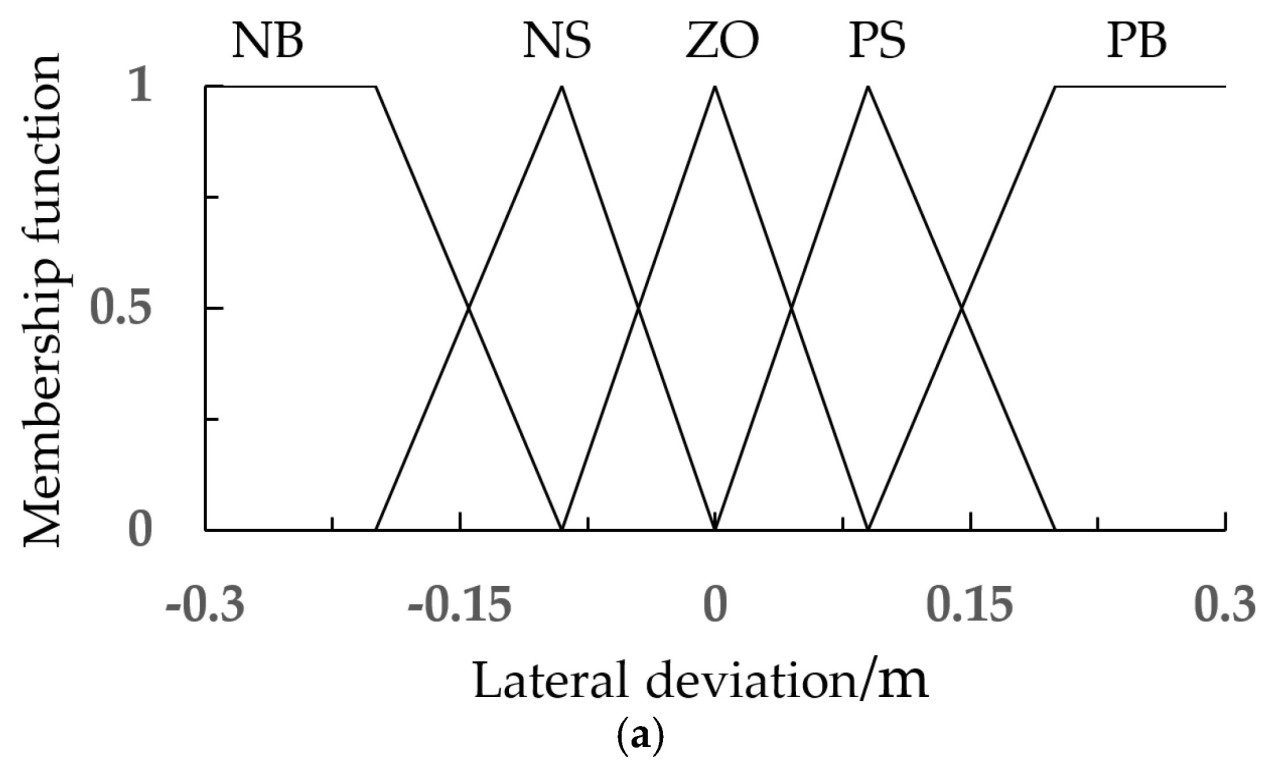
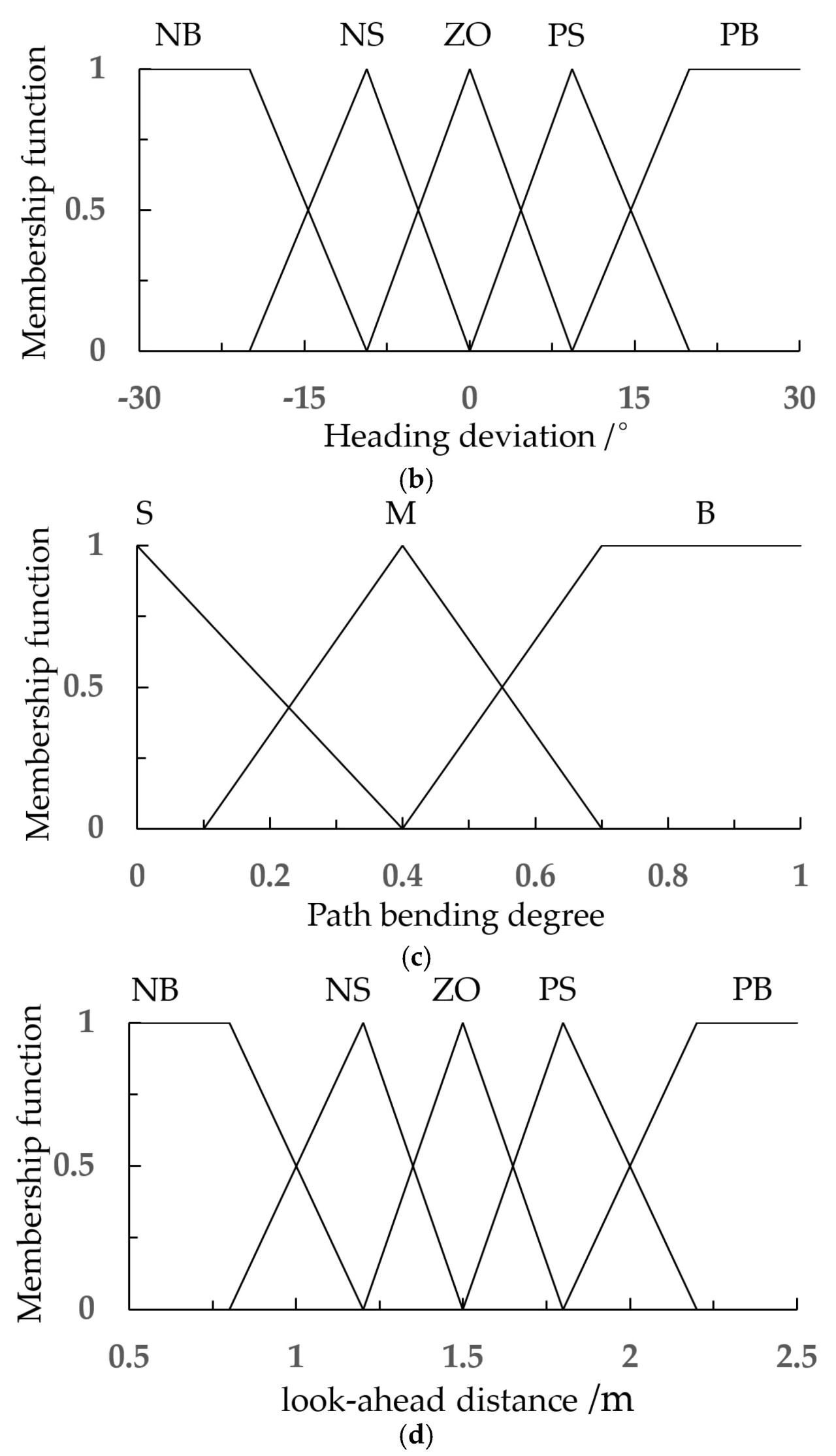
Рисунок 5. Функции принадлежности: (a) функция принадлежности для бокового отклонения de; (b) функция принадлежности для углового отклонения курса θe; (c) функция принадлежности для степени изогнутости траектории c; и (d) функция принадлежности для упреждающего расстояния Ld.
В этом исследовании были приняты функции принадлежности с неравномерным квантованием вместо равномерного квантования. Причина в том, что когда отклонение положения прототипа или степень изогнутости траектории были большими, использовался уровень квантования с большим масштабом для обеспечения хорошей стабильности управления. И наоборот, когда отклонение положения или степень изогнутости траектории были малыми, использовался уровень квантования с меньшим масштабом для достижения более точной регулировки положения прототипа.
2.3.2. Правила управления
Чтобы гарантировать, что нечеткий регулятор надежно и быстро приведет прототип к сходимости с эталонной траекторией, необходимо было разработать разумные правила управления. При формулировании правил управления соблюдались следующие принципы:
(1) Когда de и θe имеют одинаковый знак: Это указывает на то, что прототип будет двигаться дальше от эталонной траектории, если продолжит движение в текущем направлении. В таких случаях, если боковое отклонение de или угловое отклонение курса θe велики, следует выбирать меньшее упреждающее расстояние, чтобы прототип мог быстрее сойтись с эталонной траекторией, тем самым повышая эффективность отслеживания траектории.
(2) Когда de и θe имеют противоположные знаки: Это указывает на то, что прототип приближается к эталонной траектории, если продолжит движение в текущем направлении. В этом случае, когда отклонения (de, θe) малы, упреждающее расстояние может быть соответственно увеличено для повышения стабильности отслеживания траектории.
(3) Между тем, чтобы повысить реакцию прототипа на изменения кривизны траектории и уменьшить феномен «срезания углов», вызванный большей локальной степенью изогнутости траектории c, следует выбирать меньшее упреждающее расстояние, чтобы позволить прототипу адаптироваться к изменениям кривизны траектории.
На основе вышеуказанных принципов вождения и после множественных симуляций и корректировок разработанный нечеткий регулятор включал в общей сложности 75 правил управления. Правила нечеткого управления показаны в Таблице 1, Таблице 2 и Таблице 3, а поверхности правил нечеткого управления проиллюстрированы на Рисунке 6.
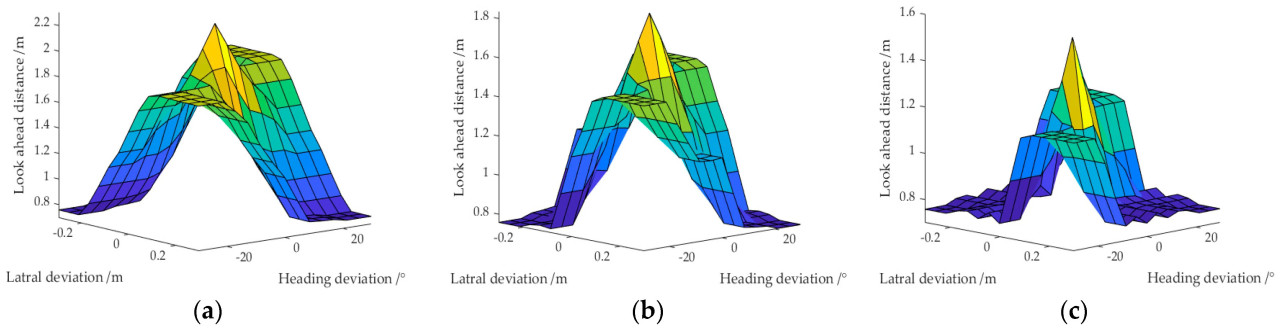
Рисунок 6. Поверхности правил нечеткого управления: (a) степень изогнутости траектории c = S; (b) степень изогнутости траектории c = M; и (c) степень изогнутости траектории c = B.
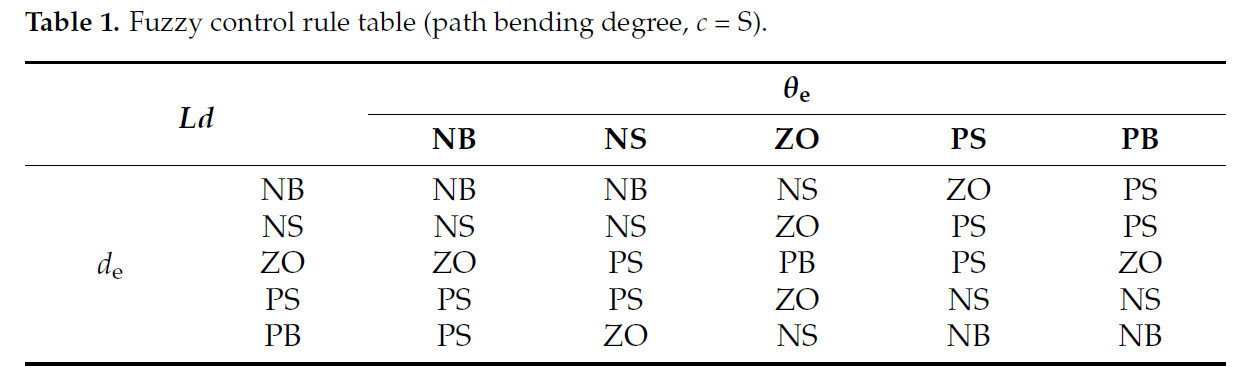
Таблица 1. Таблица правил нечеткого управления (степень изогнутости траектории c = S).
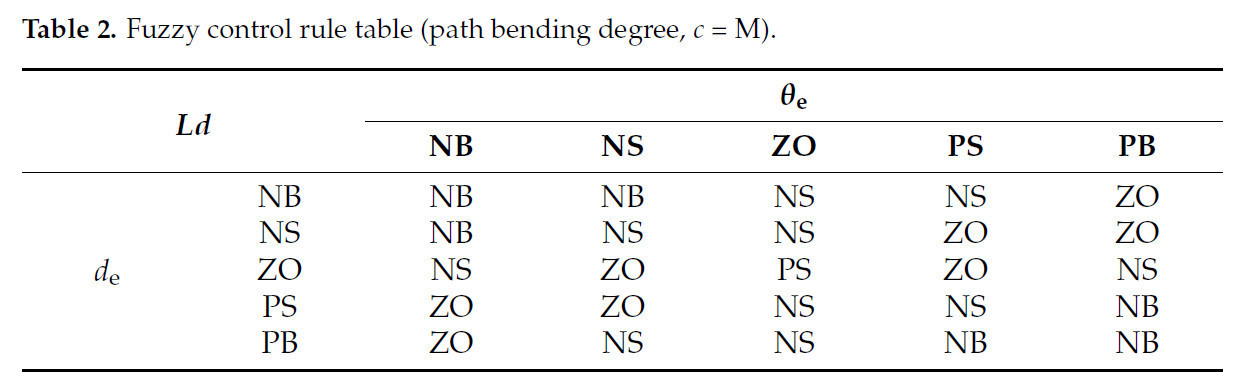
Таблица 2. Таблица правил нечеткого управления (степень изогнутости траектории c = M).
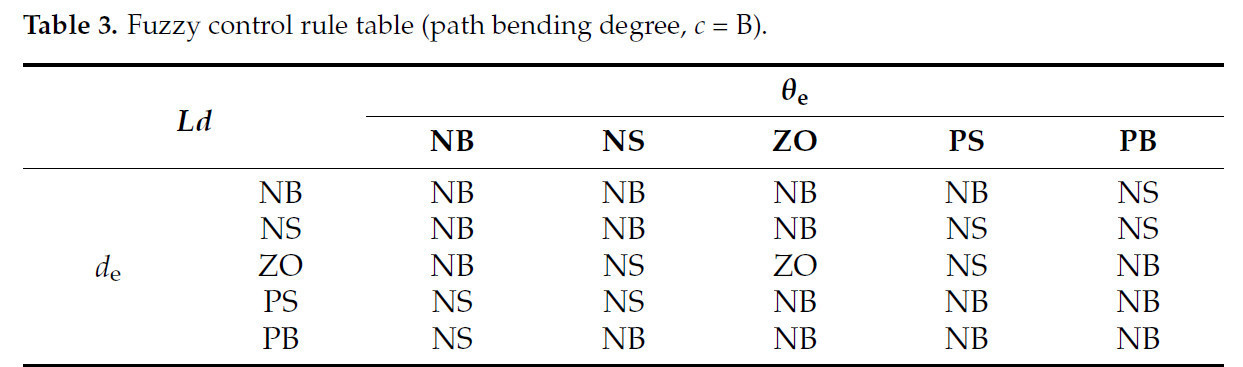
Таблица 3. Таблица правил нечеткого управления (степень изогнутости траектории c = B).
2.3.3. Дефазификация
Дефазификация является ключевым шагом в нечетком управлении, используемым для преобразования нечетких множеств в точные и действенные выходные значения. Среди различных методов дефазификации метод центроида используется наиболее часто. По сути, метод центроида представляет собой подход взвешенного среднего, где весами являются степени принадлежности каждого элемента в заключении нечеткого вывода. В этом исследовании для дефазификации использовался метод центроида, и формула показана ниже:

Формула, полученная после дискретизации, выглядит следующим образом:

где u представляет целевое значение, полученное после дефазификации, μ_N представляет функцию принадлежности, а u_i представляет возможные выходные значения.
2.4. Модель управления скоростью
Скорость транспортного средства v значительно влияет на точность отслеживания траектории и эффективность навигации. В этом исследовании предлагается нелинейная модель управления скоростью, основанная на степени отклонения транспортного средства и кривизне траектории. Модель интегрирует эффекты степени бокового отклонения a, степени углового отклонения курса b и степени изогнутости траектории c для динамической регулировки скорости прототипа. Если входное значение превышало диапазон, оно устанавливалось на граничное значение диапазона:
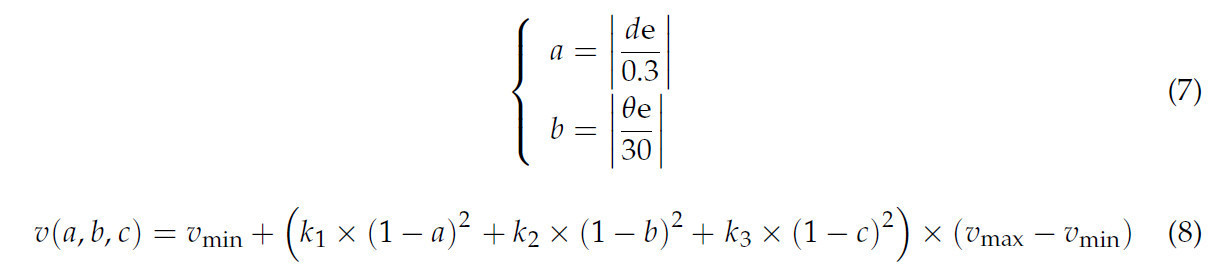
где v(a, b, c) представляет динамически регулируемую скорость, м·с⁻¹; v_min является минимальной скоростью движения, м·с⁻¹; v_max является максимальной скоростью движения, м·с⁻¹; а k₁, k₂ и k₃ являются весовыми коэффициентами для степени бокового отклонения, степени углового отклонения курса и кривизны траектории соответственно. Показатели степени (1 - a), (1 - b) и (1 - c) были установлены равными 2, чтобы усилить нелинейное влияние этих членов на скорость. С помощью этой нелинейной модели управления скоростью система может соответствующим образом увеличивать v для поддержания высокой эффективности вождения, когда боковое отклонение, угловое отклонение курса и кривизна траектории малы. Однако, когда любое из этих отклонений увеличивается, система может быстро отреагировать и эффективно снизить риск отклонения транспортного средства от эталонной траектории. На основе вышеприведенного анализа и многочисленных экспериментов по настройке значения k₁, k₂ и k₃ были установлены равными 0,4, 0,2 и 0,4 соответственно.
2.5. Разработка эксперимента
Чтобы подтвердить эффективность предложенного алгоритма, эксперименты по отслеживанию траектории были проведены в октябре 2024 года на Сельскохозяйственной экспериментальной базе Чжэцзянского университета A&F. Во время эксперимента испытательная площадка была открытой, со стабильными и точными сигналами GNSS. Скорость движения прототипа была установлена как в постоянном, так и в переменном режимах. Диапазон переменной скорости был настроен как [0,4 м/с, 1,2 м/с] на основе практических требований, в то время как постоянная скорость была установлена на 0,8 м/с. Эксперименты по отслеживанию траектории были проведены с использованием траекторий с переменной кривизной, частота дискретизации данных навигационной системы составляла 5 Гц. Для эксперимента были выбраны две классические траектории с переменной кривизной, обычно встречающиеся в сельскохозяйственных условиях: U-образная траектория и S-образная траектория.
Эксперимент 1: При условии постоянной скорости транспортного средства был проведен сравнительный эксперимент между традиционной моделью pure-pursuit с фиксированным упреждением и улучшенной моделью pure-pursuit с динамическим упреждением, предложенной в данной статье. Цель состояла в том, чтобы проверить эффективность динамического упреждающего расстояния на основе нечеткого регулятора в повышении точности отслеживания траектории для траекторий с переменной кривизной.
Эксперимент 2: При условии использования стратегии динамического упреждающего расстояния в обоих случаях был проведен сравнительный эксперимент между постоянной скоростью и переменной скоростью, чтобы проверить эффективность предложенной модели управления скоростью в повышении точности отслеживания траектории для траекторий с переменной кривизной.
Чтобы лучше оценить качество отслеживания траектории с переменной кривизной, использовались такие метрики, как среднее боковое отклонение, максимальное боковое отклонение, стандартное отклонение и время отслеживания траектории. Среднее боковое отклонение относится к среднему абсолютному значению всех боковых отклонений от начала до конца эксперимента; максимальное боковое отклонение относится к максимальному абсолютному боковому отклонению, наблюдаемому на протяжении всего эксперимента; стандартное отклонение отражает степень разброса между отслеживаемой траекторией и желаемой траекторией; а время отслеживания траектории относится к общему времени, необходимому для отслеживания желаемой траектории от начала до конца эксперимента. Среднее и максимальное боковые отклонения являются ключевыми показателями точности отслеживания траектории, стандартное отклонение отражает стабильность отслеживания траектории, а время отслеживания траектории указывает на эффективность отслеживания.
3. Результаты и обсуждение
Для удобства дальнейшего обсуждения метод отслеживания траектории с фиксированным упреждающим расстоянием при постоянной скорости определяется как Метод 1, метод отслеживания траектории с динамическим упреждающим расстоянием при постоянной скорости определяется как Метод 2, а метод отслеживания траектории с динамическим упреждающим расстоянием при переменной скорости определяется как Метод 3.
3.1. Результаты Эксперимента 1
После Эксперимента 1 можно получить соответствующие данные для лучшего обсуждения построенного нечеткого регулятора. Данные Эксперимента 1 показаны в Таблице 4.
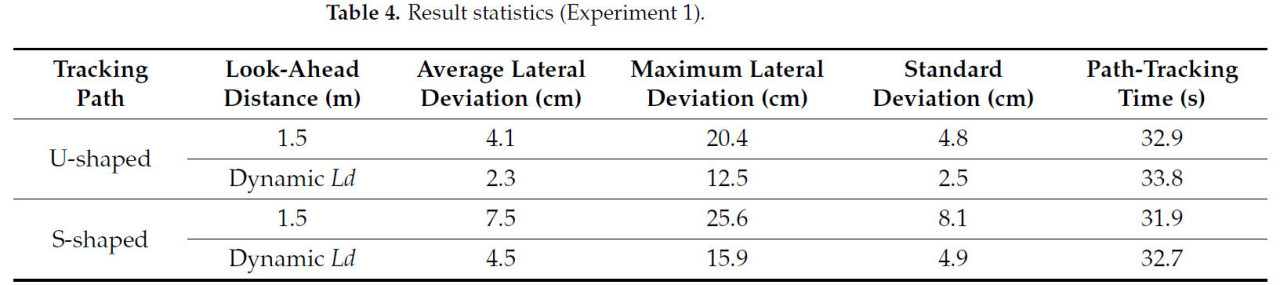
Таблица 4. Статистика результатов (Эксперимент 1).
3.2. Обсуждение Эксперимента 1
3.2.1. Точность отслеживания (Эксперимент 1)
В Эксперименте 1 отслеживание U-образной траектории с использованием Метода 2 привело к среднему боковому отклонению 2,3 см и максимальному боковому отклонению 12,5 см. Для отслеживания S-образной траектории с помощью Метода 2 среднее боковое отклонение составило 4,5 см, а максимальное боковое отклонение — 15,9 см. По сравнению с Методом 1, Метод 2 снизил среднее боковое отклонение и максимальное боковое отклонение на U-образной траектории на 43,9% и 38,7% соответственно. На S-образной траектории Метод 2 снизил среднее боковое отклонение и максимальное боковое отклонение на 40% и 37,9% соответственно.
Метод 2 достиг лучшей точности отслеживания траектории для сельскохозяйственной техники на траекториях с переменной кривизной. Это связано с тем, что Метод 2 динамически регулирует упреждающее расстояние в реальном времени с помощью нечеткого регулятора на основе положения транспортного средства и кривизны траектории. Вышеуказанные данные демонстрируют, что на траекториях с переменной кривизной модель pure-pursuit с динамическим упреждением превосходит модель pure-pursuit с фиксированным упреждающим расстоянием.
3.2.2. Стабильность отслеживания (Эксперимент 1)
В Эксперименте 1 на U-образной траектории Метод 2 улучшил стабильность отслеживания траектории на 47,9% по сравнению с Методом 1. На S-образной траектории Метод 2 улучшил стабильность отслеживания траектории на 39,5% по сравнению с Методом 1.
Рисунок 7 и Рисунок 8 наглядно показывают, что Метод 2 значительно уменьшает феномен «срезания углов». Нечеткий регулятор эффективно решает проблемы «срезания углов» и перерегулирования, выдавая меньшие упреждающие расстояния, обеспечивая более эффективную сходимость траектории для прототипа. Разница между отслеживаемой траекторией и эталонной траекторией, как показано на Рисунке 7 и Рисунке 8, и кривая изменения бокового отклонения, показанная на Рисунке 9, указывает на то, что на траекториях с переменной кривизной модель pure-pursuit с динамическим упреждением достигает лучшей стабильности отслеживания траектории по сравнению с моделью pure-pursuit с фиксированным упреждающим расстоянием.
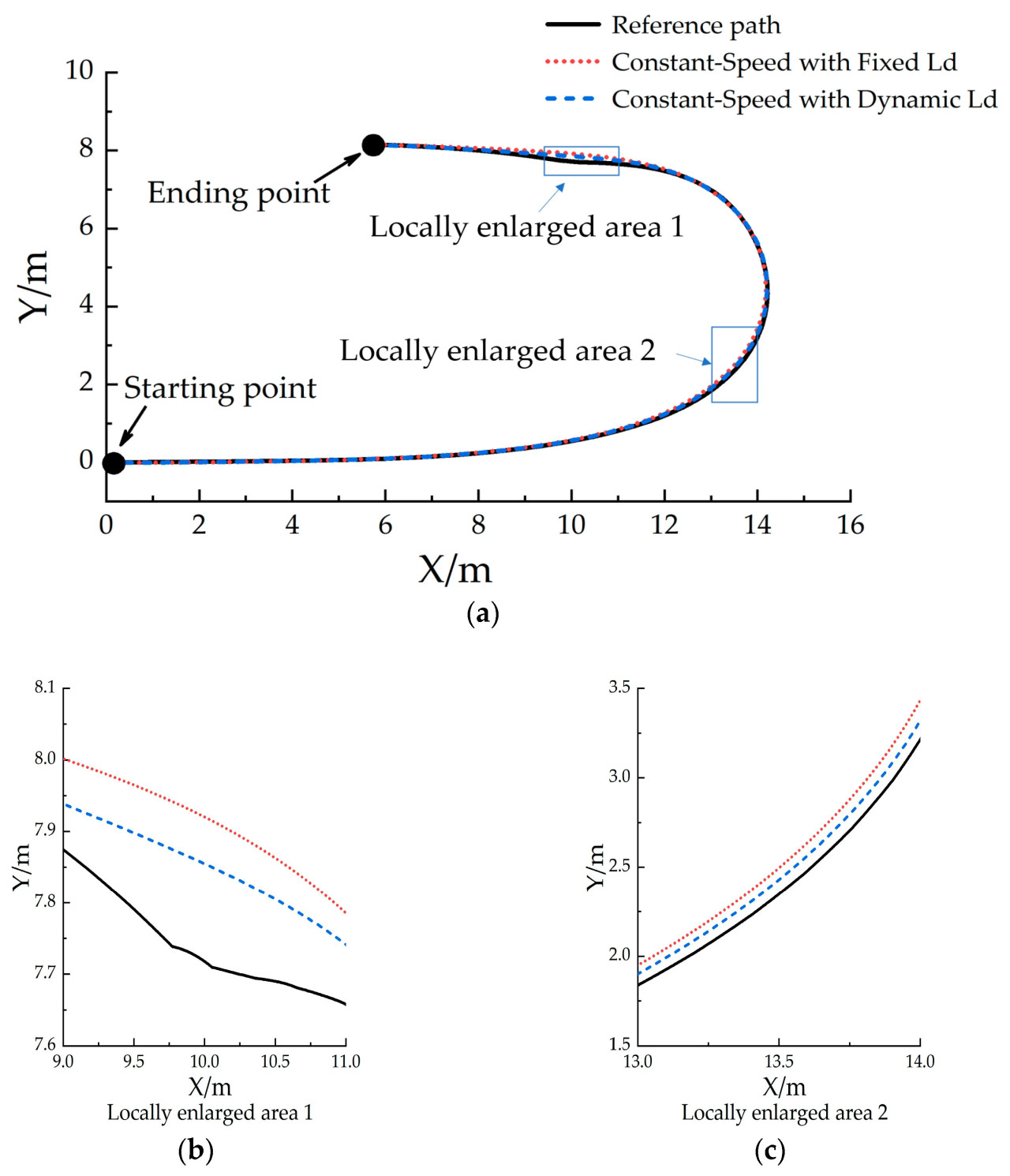
Рисунок 7. Траектория отслеживания U-образной траектории (Эксперимент 1): (a) общая траектория отслеживания; (b) локально увеличенная область 1; и (c) локально увеличенная область 2.
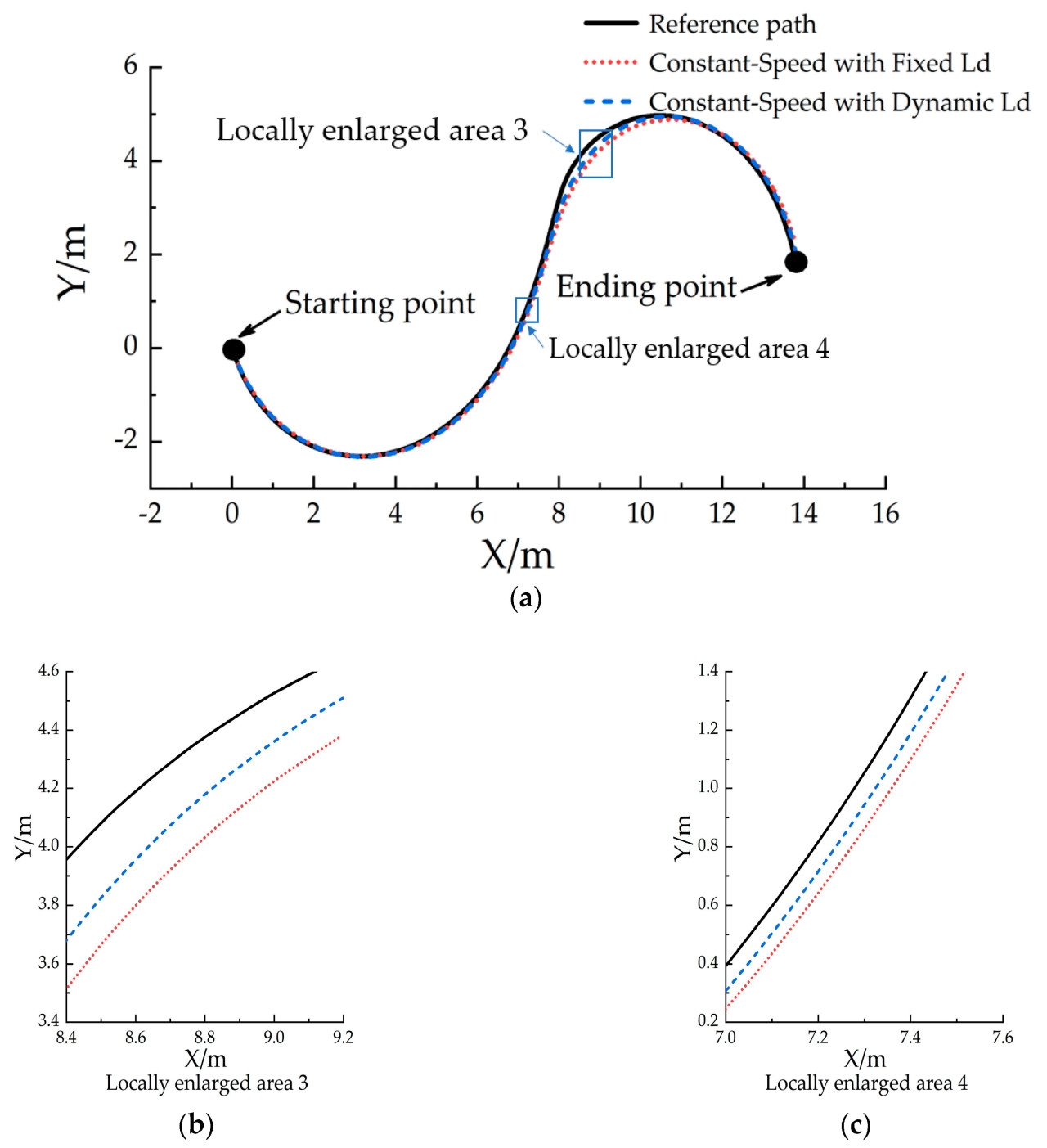
Рисунок 8. Траектория отслеживания S-образной траектории (Эксперимент 1): (a) общая траектория отслеживания; (b) локально увеличенная область 3; и (c) локально увеличенная область 4.
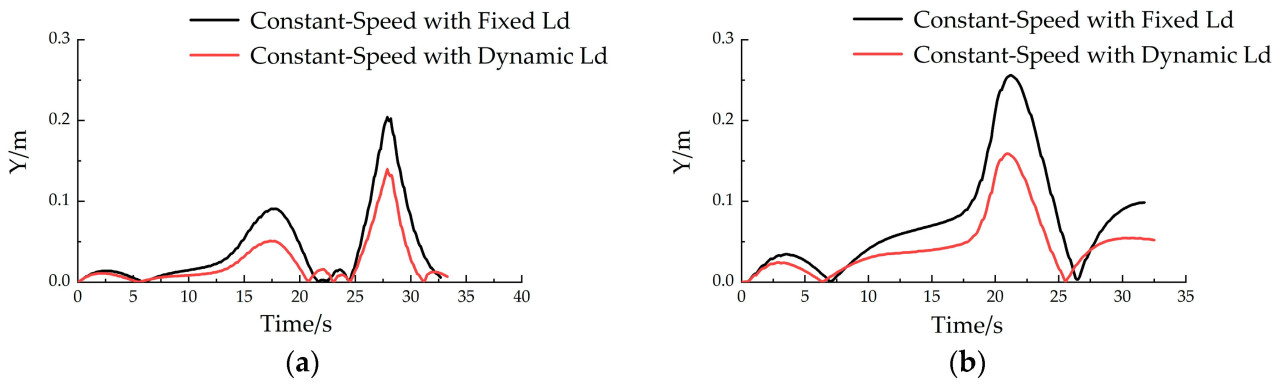
Рисунок 9. Боковое отклонение отслеживания траектории (Эксперимент 1): (a) боковое отклонение отслеживания U-образной траектории (Эксперимент 1) и (b) боковое отклонение отслеживания S-образной траектории (Эксперимент 1).
3.2.3. Время отслеживания (Эксперимент 1)
В Эксперименте 1 время отслеживания Метода 1 и Метода 2 как для U-образной, так и для S-образной траекторий было примерно одинаковым.
Как показано на Рисунке 7 и Рисунке 8, Метод 1 из-за фиксированного упреждающего расстояния демонстрирует более выраженный феномен «срезания углов». Хотя это привело к сокращению времени отслеживания для некоторых частей траектории, требовалось дополнительное время для возврата к желаемой траектории после поворота. Напротив, Метод 2 с динамическим упреждающим расстоянием значительно уменьшает феномен «срезания углов». В результате требуется преодолеть большее расстояние траектории, что увеличивает время по сравнению с Методом 1. Однако Метод 2 сходится с желаемой траекторией быстрее после поворота, тем самым сокращая время по сравнению с Методом 1.
3.3. Результаты Эксперимента 2
После Эксперимента 2 можно получить соответствующие данные для лучшего обсуждения модели управления скоростью. Данные Эксперимента 2 показаны в Таблице 5.
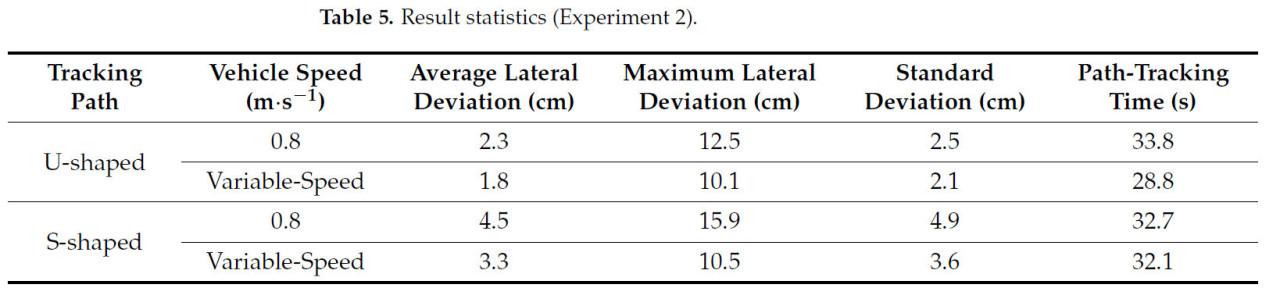
Таблица 5. Статистика результатов (Эксперимент 2).
3.4. Обсуждение Эксперимента 2
3.4.1. Точность отслеживания (Эксперимент 2)
В Эксперименте 2 отслеживание U-образной траектории с использованием Метода 3 привело к среднему боковому отклонению 1,8 см и максимальному боковому отклонению 10,1 см. Для отслеживания S-образной траектории с помощью Метода 3 среднее боковое отклонение составило 3,3 см, а максимальное боковое отклонение — 10,5 см. По сравнению с Методом 2, Метод 3 снизил среднее боковое отклонение и максимальное боковое отклонение на U-образной траектории на 21,7% и 19,2% соответственно. На S-образной траектории Метод 3 снизил среднее боковое отклонение и максимальное боковое отклонение на 26,7% и 33,9% соответственно.
Метод 3, который учитывает изменения скорости, эффективно снизил максимальное боковое отклонение во время отслеживания траектории, сохраняя при этом высокую точность отслеживания траектории. Метод 3 основывался на Методе 2, дополнительно динамически регулируя скорость, что дополнительно улучшило отслеживание желаемой траектории. Вышеуказанные данные демонстрируют, что на траекториях с переменной кривизной управление скоростью повышает точность отслеживания траектории.
3.4.2. Стабильность отслеживания (Эксперимент 2)
В Эксперименте 2 на U-образной траектории Метод 3 улучшил стабильность отслеживания траектории на 16,0% по сравнению с Методом 2. На S-образной траектории Метод 3 улучшил стабильность отслеживания траектории на 26,5% по сравнению с Методом 2.
Из Рисунка 10 и Рисунка 11 можно ясно наблюдать, что Метод 3 дополнительно улучшил феномен «срезания углов» по сравнению с Методом 2. Модель управления скоростью эффективно решает проблемы «срезания углов» и перерегулирования, регулируя скорость транспортного средства, что обеспечивает более эффективную сходимость траектории прототипа. Как показано на Рисунке 10 и Рисунке 11, разница между отслеживаемой траекторией и эталонной траекторией, а также кривая изменения бокового отклонения, показанная на Рисунке 12, указывает на то, что управление скоростью может улучшить стабильность отслеживания траектории на траекториях с переменной кривизной.
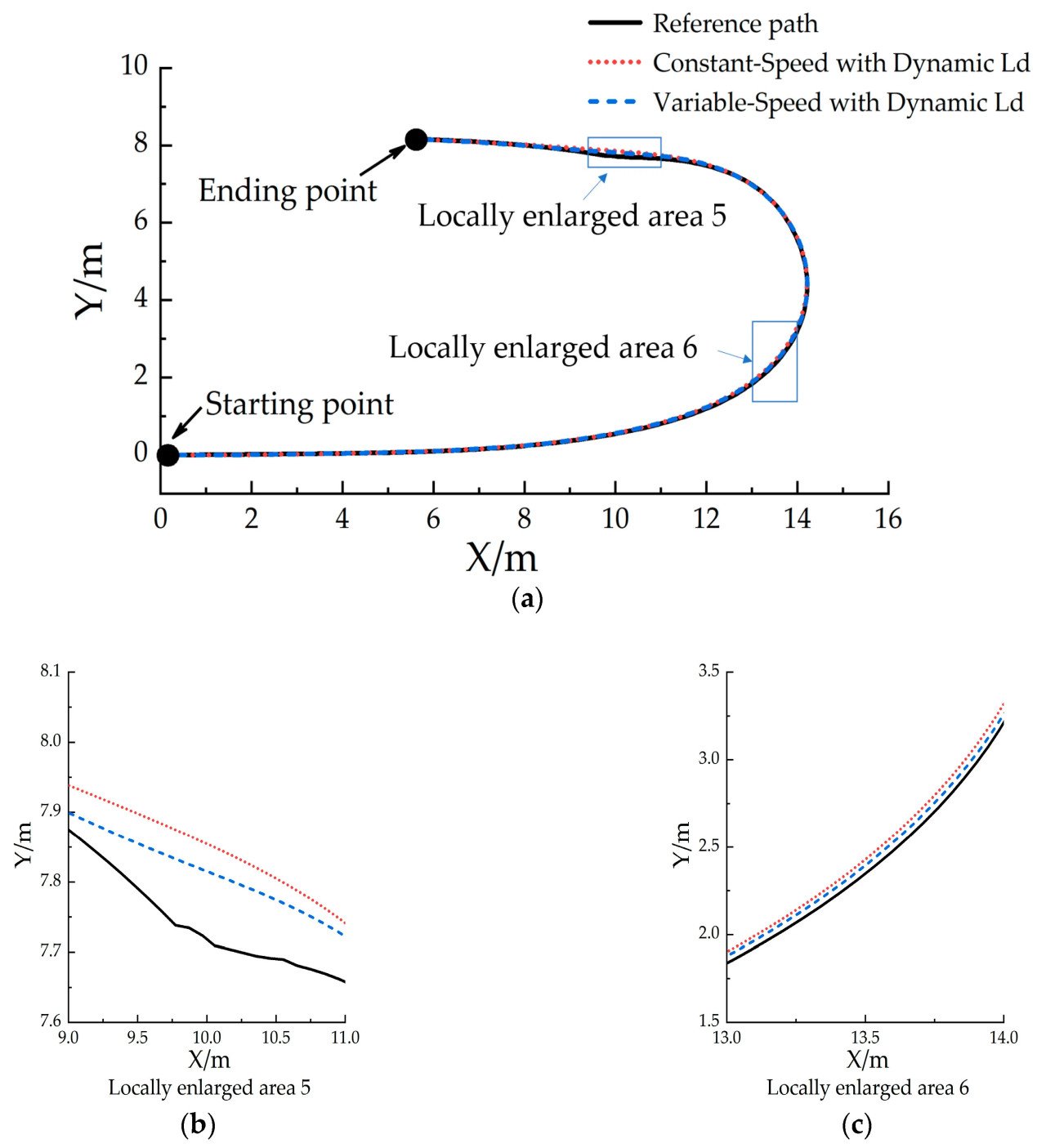
Рисунок 10. Траектория отслеживания U-образной траектории (Эксперимент 2): (a) общая траектория отслеживания; (b) локально увеличенная область 5; и (c) локально увеличенная область 6.
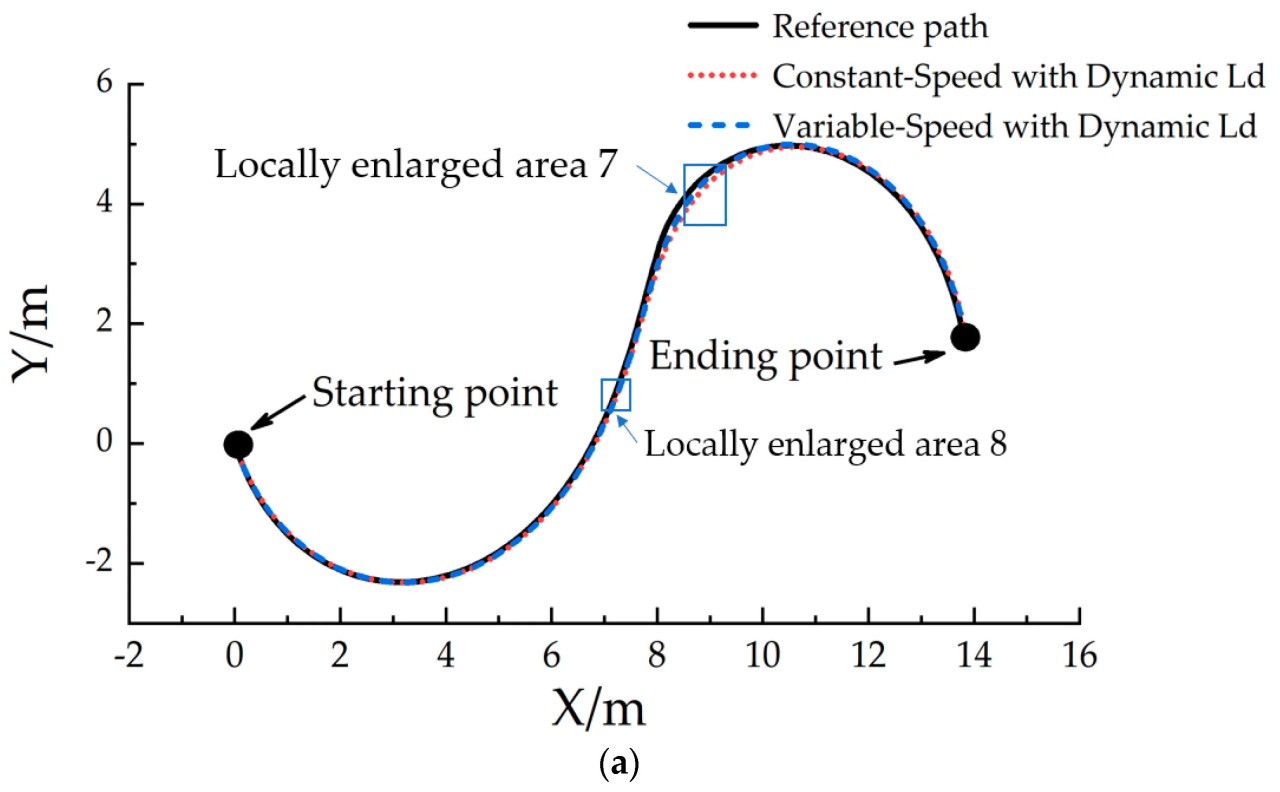
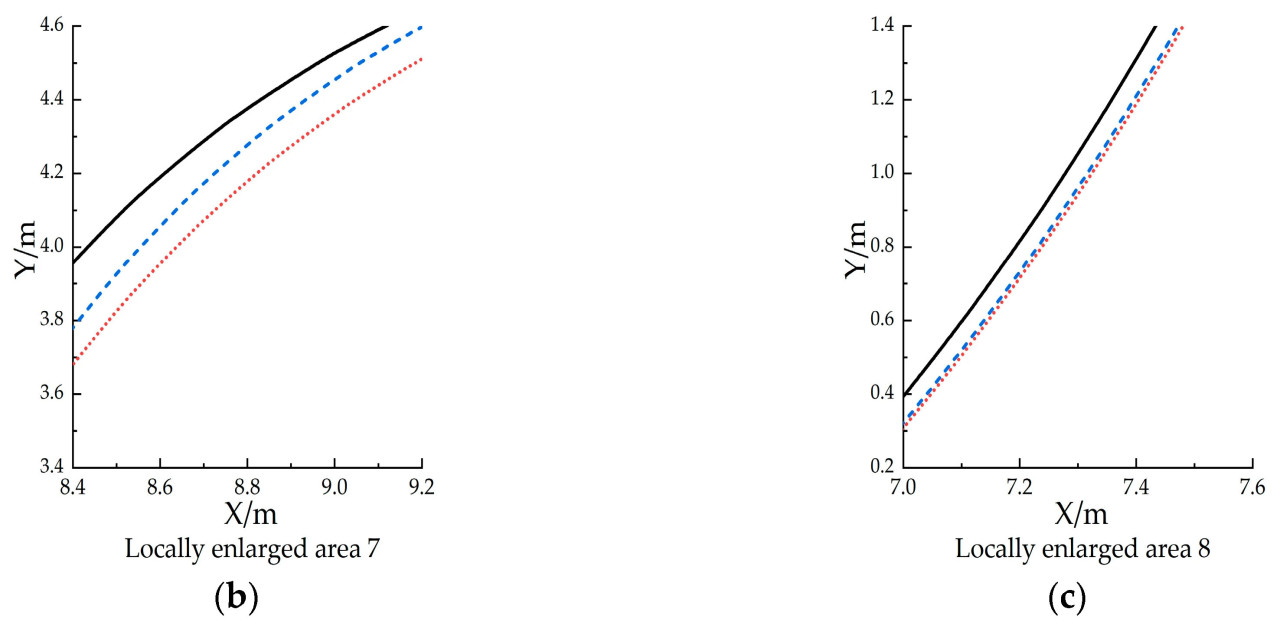
Рисунок 11. Траектория отслеживания S-образной траектории (Эксперимент 2): (a) общая траектория отслеживания; (b) локально увеличенная область 7; и (c) локально увеличенная область 8.
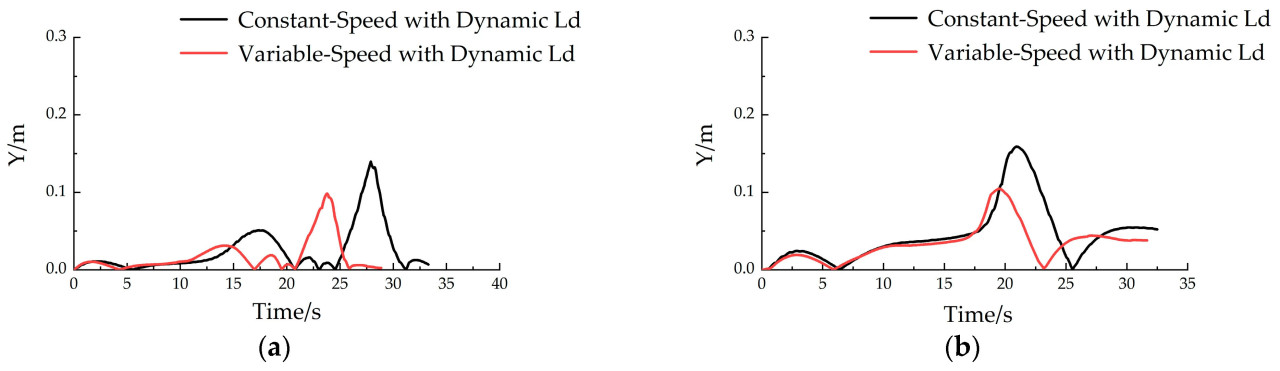
Рисунок 12. Боковое отклонение отслеживания траектории (Эксперимент 2): (a) боковое отклонение отслеживания U-образной траектории (Эксперимент 2) и (b) боковое отклонение отслеживания S-образной траектории (Эксперимент 2).
3.4.3. Время отслеживания (Эксперимент 2)
В Эксперименте 2 время отслеживания для Метода 3 на U-образной траектории составило 28,8 с, что на 14,8% короче по сравнению с Методом 2. Время отслеживания для Метода 2 и Метода 3 на S-образной траектории было примерно одинаковым.
При отслеживании U-образной траектории Метод 3 потребовал наименьшего времени; при отслеживании S-образной траектории время отслеживания Метода 3 было аналогично двум другим методам, в то время как точность и стабильность отслеживания траектории были улучшены. Когда прототип сталкивался с траекторией с изменяющейся кривизной, скорость уменьшалась для повышения точности отслеживания и дальнейшего смягчения феномена «срезания углов». Когда предстоящая траектория была относительно прямой, скорость увеличивалась для повышения эффективности отслеживания. Представленные выше данные демонстрируют, что управление скоростью может повысить эффективность отслеживания траектории, обеспечивая при этом точность и стабильность отслеживания.
3.5. Обсуждение сравнения предложенного метода с другими методами
Метод, предложенный в этой статье, по сравнению с другими улучшенными методами pure-pursuit [14,15,16,17,18,19], имеет следующие ключевые преимущества: Он определяет кривизну упреждающей траектории в модели pure-pursuit, тем самым улучшая модель за счет предвидения. Он всесторонне учитывает влияние бокового отклонения de, углового отклонения курса θe, степени изогнутости траектории c и скорости v на отслеживание траектории и строит нечеткий регулятор и модель управления скоростью для повышения точности и эффективности отслеживания траектории. Напротив, методы, упомянутые во введении, обычно учитывают только подмножество этих параметров. Поэтому метод, предложенный в этой статье, демонстрировал лучшую устойчивость и более адаптируем к траекториям с переменной кривизной.
4. Выводы
(1) В этой статье решается проблема низкой точности отслеживания траектории сельскохозяйственной техники, вызванной переменной кривизной траекторий, путем предложения модели pure-pursuit с динамическим упреждающим расстоянием на основе нечеткого регулятора. Модель использует боковое отклонение, угловое отклонение курса и кривизну траектории в качестве нечетких входных данных и генерирует упреждающее расстояние в качестве нечеткого выходного сигнала, которое затем дефазифицируется для определения оптимального упреждающего расстояния. По сравнению с методом отслеживания траектории с фиксированным упреждающим расстоянием, подход на основе нечеткого управления снизил среднее боковое отклонение и максимальное боковое отклонение на 43,9% и 38,7% соответственно, в то время как улучшил стабильность отслеживания траектории на 47,9% при отслеживании U-образной траектории. Для S-образных траекторий среднее боковое отклонение и максимальное боковое отклонение были снижены на 40% и 37,9% соответственно, а стабильность отслеживания траектории увеличилась на 39,5%. Эти результаты демонстрируют эффективность предложенного в этом исследовании нечеткого регулятора.
(2) В этой статье представлена функция управления переменной скоростью, которая регулирует скорость прототипа в реальном времени на основе отклонения положения транспортного средства и кривизны траектории в области упреждения. Были проведены сравнительные эксперименты для оценки показателей отслеживания траектории в условиях постоянной и переменной скорости для траекторий с переменной кривизной. При одинаковом динамическом упреждающем расстоянии метод управления переменной скоростью снизил среднее боковое отклонение и максимальное боковое отклонение на 21,7% и 19,2% соответственно, улучшил стабильность отслеживания траектории на 16% и сократил время отслеживания на 14,8% для U-образных траекторий по сравнению с управлением на постоянной скорости. Для S-образных траекторий среднее боковое отклонение и максимальное боковое отклонение были снижены на 26,7% и 33,9% соответственно, а стабильность отслеживания траектории увеличилась на 26,5%. Эти результаты подтверждают эффективность предложенного в этом исследовании регулятора скорости.
(3) Количественное масштабирование правил нечеткого управления может быть дополнительно оптимизировано. В дальнейших исследованиях могут быть использованы более точные правила нечеткого управления путем квантования входных и выходных переменных на дополнительные нечеткие подмножества, что позволит идентифицировать больше состояний отклонения и обеспечивать более точное динамическое упреждающее расстояние. Кроме того, разработка модели управления скоростью может быть дополнительно усовершенствована для повышения точности отслеживания траектории системы автоматической навигации сельскохозяйственной техники.
(4) Повышение точности отслеживания траектории сельскохозяйственной техникой на траекториях с переменной кривизной может усилить технологическую конкурентоспособность производителей. Для фермеров это может снизить потребность в рабочей силе и повысить точность операций. Дальнейшие исследования в этой области могли бы быть сосредоточены на дополнительной оптимизации алгоритмов отслеживания траектории, интеграции технологий мультисенсоров и оптимизации энергоэффективности для увеличения срока службы батареи.
Ссылки
1. Li, S.; Zhang, M.; Ji, Y.; Zhang, Z.; Cao, R.; Chen, B.; Li, H.; Yin, Y. Agricultural machinery GNSS/IMU-integrated navigation based on fuzzy adaptive finite impulse response Kalman filtering algorithm. Comput. Electron. Agric. 2021, 191, 106524. [Google Scholar] [CrossRef]
2. Liu, Z.; Zhang, Z.; Luo, X.; Wang, H.; Huang, P.; Zhang, J. Design of automatic navigation operation system for Lovol ZP9500 high clearance boom sprayer based on GNSS. Trans. Chin. Soc. Agric. Eng. 2018, 34, 15–21. [Google Scholar]
3. Yao, Z.; Zhao, C.; Zhang, T. Agricultural machinery automatic navigation technology. Iscience 2023, 27, 108714. [Google Scholar] [CrossRef] [PubMed]
4. Tang, Y.; Zhao, J.; Wang, M.; Hao, H.; He, X.; Meng, Y. Beidou navigation method based on intelligent computing and extended Kalman filter fusion. J. Ambient Intell. Humaniz. Comput. 2019, 10, 4431–4438. [Google Scholar] [CrossRef]
5. Zhao, J.; Yang, Y.; Zheng, H.; Dong, Y. Global agricultural robotics research and development: Trend forecasts. J. Phys. Conf. Ser. 2020, 1693, 012227. [Google Scholar] [CrossRef]
6. Wang, J.; Qiu, X.; Liu, Z.; Cai, Z.; Wu, Z.; Feng, Y. Path tracking of snake-like robot based on neural network identifier. In Proceedings of the 2019 IEEE 4th International Conference on Advanced Robotics and Mechatronics (ICARM), Toyonaka, Japan, 3–5 July 2019; pp. 750–755. [Google Scholar]
7. Hu, C.; Ru, Y.; Li, X.; Fang, S.; Zhou, H.; Yan, X.; Liu, M.; Xie, R. Path tracking control for brake-steering tracked vehicles based on an improved pure pursuit algorithm. Biosyst. Eng. 2024, 242, 1–15. [Google Scholar] [CrossRef]
8. Wu, C.; Wu, J.; Wen, L.; Chen, Z.; Yang, W.; Zhai, W. Variable curvature path tracking control for the automatic navigation of tractors. Trans. CSAE 2022, 38, 1–7. [Google Scholar]
9. Hameed, I.A.; la Cour-Harbo, A.; Osen, O.L. Side-to-side 3D coverage path planning approach for agricultural robots to minimize skip/overlap areas between swaths. Robot. Auton. Syst. 2016, 76, 36–45. [Google Scholar] [CrossRef]
10. Liu, W.; Wang, J.; Luo, J.; Wu, Z.; Chen, J.; Zhou, Y.; Sun, Y.; Shen, Z.; Xu, N.; Yang, Y. Farmland parcel mapping in mountain areas using time-series SAR data and VHR optical images. Remote Sens. 2020, 12, 3733. [Google Scholar] [CrossRef]
11. Hong, R.; Park, J.; Jang, S.; Shin, H.; Kim, H.; Song, I. Development of a parcel-level land boundary extraction algorithm for aerial imagery of regularly arranged agricultural areas. Remote Sens. 2021, 13, 1167. [Google Scholar] [CrossRef]
12. Ren, H.; Wu, J.; Lin, T.; Yao, Y.; Liu, C. Research on an Intelligent Agricultural Machinery Unmanned Driving System. Agriculture 2023, 13, 1907. [Google Scholar] [CrossRef]
13. Chen, Z.; Wang, H.; Zhou, M.; Zhu, J.; Chen, J.; Li, B. Design and Experiment of an Autonomous Navigation System for a Cattle Barn Feed-Pushing Robot Based on UWB Positioning. Agriculture 2024, 14, 694. [Google Scholar] [CrossRef]
14. Liu, W.; Zhou, J.; Liu, Y.; Zhang, T.; Meng, Y.; Chen, J.; Zhou, C.; Hu, J.; Chen, X. An Ultrasonic Ridge-Tracking Method Based on Limiter Sliding Window Filter and Fuzzy Pure Pursuit Control for Ridge Transplanter. Agriculture 2024, 14, 1713. [Google Scholar] [CrossRef]
15. Wei, S.; Li, S.; Zhang, M.; Ji, Y.; Xiang, M.; Li, M. Automatic navigation path search and turning control of agricultural machinery based on GNSS. Trans. Chin. Soc. Agric. Eng. 2017, 33, 70–77. [Google Scholar]
16. Yao, L.; Hu, D.; Zhao, C.; Yang, Z.; Zhang, Z. Wireless positioning and path tracking for a mobile platform in greenhouse. Int. J. Agric. Biol. Eng. 2021, 14, 216–223. [Google Scholar] [CrossRef]
17. Zhang, H.; Wang, G.; Lu, Y.; Qin, C.; Liu, L.; Gong, J. Agricultural machinery automatic navigation control system based on improved pure tracking model. Nongye Jixie Xuebao/Trans. Chin. Soc. Agric. Mach. 2020, 51, 18–25. [Google Scholar]
18. Xu, L.; Yang, Y.; Chen, Q.; Fu, F.; Yang, B.; Yao, L. Path tracking of a 4WIS–4WID agricultural machinery based on variable look-ahead distance. Appl. Sci. 2022, 12, 8651. [Google Scholar] [CrossRef]
19. Wu, Y.; Xie, Z.; Lu, Y. Steering wheel AGV path tracking control based on improved pure pursuit model. J. Phys. Conf. Ser. 2021, 2093, 012005. [Google Scholar] [CrossRef]
20. Nagasaka, Y.; Saito, H.; Tamaki, K.; Seki, M.; Kobayashi, K.; Taniwaki, K. An autonomous rice transplanter guided by global positioning system and inertial measurement unit. J. Field Robot. 2009, 26, 537–548. [Google Scholar] [CrossRef]
21. Ahn, J.; Shin, S.; Kim, M.; Park, J. Accurate path tracking by adjusting look-ahead point in pure pursuit method. Int. J. Automot. Technol. 2021, 22, 119–129. [Google Scholar] [CrossRef]
22. Yang, Y.; Li, Y.; Wen, X.; Zhang, G.; Ma, Q.; Cheng, S.; Qi, J.; Xu, L.; Chen, L. An optimal goal point determination algorithm for automatic navigation of agricultural machinery: Improving the tracking accuracy of the Pure Pursuit algorithm. Comput. Electron. Agric. 2022, 194, 106760. [Google Scholar] [CrossRef]
23. Sun, X.; Liu, L.; Liu, Y.; Li, S.; Wan, F. Disturbance event triggered-model predictive tracking control for 4WIS–4WID mobile robot. Signal Image Video Process. 2024, 18, 7431–7443. [Google Scholar] [CrossRef]
24. Wang, Y.; Zhu, X.; Xu, L.; Yang, T. Path tracking of farming platform with unmanned four-wheel independent driving and four-wheel independent steering in ridge tillage mode. Trans. CSAE 2024, 40, 37–47. [Google Scholar]
25. Sui, Y.; Yang, Z.; Zhuo, H.; You, Y.; Que, W.; He, N. A Fuzzy Pure Pursuit for Autonomous UGVs Based on Model Predictive Control and Whole-Body Motion Control. Drones 2024, 8, 554. [Google Scholar] [CrossRef]
26. Kim, S.; Lee, J.; Han, K.; Choi, S.B. Vehicle path tracking control using pure pursuit with MPC-based look-ahead distance optimization. IEEE Trans. Veh. Technol. 2023, 73, 53–66. [Google Scholar] [CrossRef]
27. Yu, L.; Yan, X.; Kuang, Z.; Chen, B.; Zhao, Y. Driverless bus path tracking based on fuzzy pure pursuit control with a front axle reference. Appl. Sci. 2019, 10, 230. [Google Scholar] [CrossRef]
28. Li, W.; Xu, H.; Liu, X.; Wang, Y.; Zhu, Y.; Lin, X.; Wang, Z.; Zhang, Y. Regenerative braking control strategy for pure electric vehicles based on fuzzy neural network. Ain Shams Eng. J. 2024, 15, 102430. [Google Scholar] [CrossRef]
29. Lu, Y. Adaptive-fuzzy control compensation design for direct adaptive fuzzy control. IEEE Trans. Fuzzy Syst. 2018, 26, 3222–3231. [Google Scholar] [CrossRef]
30. Bennajeh, A.; Ben Said, L. Driving control based on bilevel optimization and fuzzy logic. Int. J. Intell. Syst. 2021, 36, 4495–4523. [Google Scholar] [CrossRef]
Zhou J, Wen J, Yao L, Yang Z, Xu L, Yao L. Agricultural Machinery Path Tracking with Varying Curvatures Based on an Improved Pure-Pursuit Method. Agriculture. 2025; 15(3):266. https://doi.org/10.3390/agriculture15030266
Перевод статьи «Agricultural Machinery Path Tracking with Varying Curvatures Based on an Improved Pure-Pursuit Method» авторов Zhou J, Wen J, Yao L, Yang Z, Xu L, Yao L., оригинал доступен по ссылке. Лицензия: CC BY. Изменения: переведено на русский язык

















































































































Комментарии (0)