Быстрый роторный культиватор для каменистой солёной почвы: конструкция, моделирование и лучшие параметры
Учитывая плотную и затвердевшую засоленную щелочную почву района Биньхай (Binhai New Area), а также проблемы низкого качества и эффективности традиционной ротационной обработки, в данном исследовании был разработан высокоскоростной роторный культиватор, обеспечивающий высокоскоростное вращение фрезерного барабана для резания почвы. Средняя рабочая скорость такого культиватора выше, чем у обычного. Был проведён анализ рабочих условий культиватора и процесса резания почвы ножом, а также теоретический анализ траектории движения, что позволило определить соотношение рабочих скоростей для высокоскоростного режима.
Аннотация
Рабочий процесс высокоскоростного роторного культиватора моделировался с использованием программного обеспечения EDEM. В качестве экспериментальных показателей были выбраны степень крошения почвы и выровненность поверхности после обработки. Факторами эксперимента являлись поступательная скорость машины, частота вращения ножевого барабана и глубина обработки. Был проведён ортогональный эксперимент для построения уравнений регрессии, описывающих степень крошения почвы и выровненность поверхности. С помощью аналитического программного обеспечения Design-Expert была получена следующая оптимальная комбинация параметров: частота вращения ножевого барабана — 310 об/мин, глубина обработки — 13,2 см, поступательная скорость машины — 4,8 км/ч. При этом расчётные значения степени крошения почвы и выровненности поверхности составили 90,6 % и 18,2 мм соответственно. При определении оптимальной частоты вращения барабана (310 об/мин) была проведена транзиентная структурная симуляция работы конической зубчатой передачи. Анализ показал, что максимальное эквивалентное напряжение составило 584,57 МПа, что ниже допустимого напряжения 695,8 МПа, следовательно, требования к прочности зацепления конических шестерён соблюдены. В ходе полевых сравнительных испытаний при оптимальной комбинации параметров было установлено, что после обработки высокоскоростным культиватором показатели степени крошения почвы, глубины обработки, коэффициента стабильности глубины и степени измельчения растительных остатков составили 89,3 %, 14,2 см, 92,8 % и 90,3 % соответственно. Выровненность поверхности почвы составила 16,4 мм, что превосходит результаты работы обычного роторного культиватора и соответствует агротехническим требованиям к предпосевной подготовке почвы под арахис на засоленных щелочных почвах района Биньхай.
1. Введение
Ротационная вспашка является важной частью возделывания сельскохозяйственных культур, и качество её выполнения напрямую влияет на рост и урожайность культур в последующий сезон [1]. Ротационные плуги могут эффективно разрушать и оборачивать почву, улучшать её физические свойства, повышать проницаемость и водоудерживающую способность, а также оказывать благоприятное воздействие на измельчение и заделку растительных остатков [2,3,4,5]. Засоленные земли района Биньхай в основном обрабатываются с использованием ротационного культиватора для формирования семенного ложа перед посадкой арахиса. Почва в этом районе имеет высокую степень засоления, является твердой и коркообразной, что приводит к плохому крошению, требует ротационной вспашки для подготовки семенного ложа, необходимого для посева, и серьезно влияет на эффективность ротационных операций. Следовательно, разработка ротационных культиваторов, способных повысить эффективность подготовки почвы и эффект крошения на засоленных почвах, важна для улучшения качества и эффективности ротационных операций на засоленных почвах.
Исследования, проведенные учеными в стране и за рубежом, в основном сосредоточены на нарушении почвы и изменениях ее перемещения после вспашки. Исследований по оценке эффективности работы ротационных культиваторов на засоленных почвах и анализу работы дискретно-элементной модели засоленного ротационного культиватора еще меньше. Трудно получить реальный эффект работы ротационного культиватора на засоленных почвах, поэтому необходимо усовершенствовать конструкцию ротационного культиватора в соответствии с требованиями к подготовке семенного ложа на засоленных землях.
Среди них Zhao et al. (Чжао и др.) разработали двухосный стратифицированный ротационный культиватор для засоленных и щелочных земель с прямым вращением на передней оси и обратным вращением на задней оси, чтобы решить проблемы плохого мульчирования соломы и низкой степени крошения почвы в традиционных ротационных культиваторах для засоленных и щелочных земель. Они провели испытания с использованием метода дискретного моделирования и полевых испытаний, которые показали, что двухосный стратифицированный ротационный культиватор для засоленных и щелочных земель улучшил степень крошения почвы и эффект мульчирования соломой. Эта конструкция может предоставить хороший справочный материал для разработки оборудования для обработки почвы на засоленных и щелочных землях [6]. Li et al. (Ли и др.) провели испытания по нарушению почвы и распределению воды и солей на засоленных и щелочных землях, используя различные глубины обработки традиционных ротационных культиваторов и вертикальных ротационных культиваторов. Результаты испытаний показали, что глубокий вертикальный ротационный культиватор может перерезать почвенные капилляры, ослабить испарение почвенной воды и эффективно контролировать засоление почвы [7]. Upadhyay et al. (Упадхьяй и др.) провели испытания производительности трех типов дисковых борон со смещением на различных поступательных скоростях. Результаты испытаний показали, что увеличение поступательной скорости и скорости вращения борон оказывает хорошее влияние на эффективность заделки пожнивных остатков и разрушение почвы [8]. Salokhe et al. (Салокхе и др.) экспериментировали с различными поступательными скоростями обратного ротационного культиватора в условиях глинистой почвы; результаты показали, что поступательная скорость культиватора снижает прилипание почвы при её увеличении [9]. Jafar Habibi Asl, Surrender Singh и др. провели исследование ножей ротационных культиваторов путем оптимизации трех существующих форм — C-образных, L-образных и RC-образных ножей — для лабораторных экспериментов в почвенном канале с целью определения взаимосвязи между конструктивными параметрами различных ножей и поступательной скоростью, частотой вращения, соотношением скоростей и расстоянием входа ножа в почву [10]. Tian et al. (Тянь и др.) изучали потребляемую мощность, степень крошения почвы и коэффициент глубины вспашки ротационного культиватора в качестве испытательных показателей, а также частоту вращения ротационного барабана, скорость движения агрегата и расположение ножей ротационного культиватора в качестве испытательных факторов. В итоге было определено, что скорость движения агрегата оказывает наибольшее влияние на эксплуатационные показатели ротационного культиватора, за ней следуют частота вращения ротационного барабана и расположение ножей [11]. Zheng et al. (Чжэн и др.) разработали ножевой барабан ротационного культиватора с комбинацией длинных и коротких ножей в соответствии с характеристиками распределения плотности почвы после работы комбинированной машины для глубокого рыхления и ротационной вспашки; результаты экспериментов показали, что такая конструкция ножевого барабана снижает вибрацию орудия и улучшает выровненность поверхности почвы [12].
С точки зрения конструкции оси ножей ротационного культиватора, отбрасывания и крошения почвы с помощью ножа, Yang et al. (Ян и др.) разработали комбинированный нож и ножевой барабан с телескопическим стержнем для эффективного заделки стеблей кукурузы и установили четыре ножа, расположенных с равным спиральным углом подъема в одном и том же почвенном участке [13]. Zhang et al. (Чжан и др.) разработали шестиголовый спиральный ножевой барабан для машины возврата соломы в почву, где ножи ротационного культиватора расположены по четырехголовой спирали, а вторичные ножи — по двухголовой спирали, хотя испытания показали, что частота вращения ножевого барабана и рабочая скорость оказывают значительное влияние на крошение почвы [14]. Zheng et al. (Чжэн и др.) разработали осевой ножевой барабан для выравнивания почвы с постепенным спиральным углом подъема, который увеличил количество внутренней подачи накапливающейся почвы с обеих сторон клетки комбинированной машины для полосовой обработки и ротационной вспашки, улучшил выровненность поверхности и осевую равномерность распределения почвы [15]. Matin et al. (Мэтин и др.) испытали ножевые барабаны ротационного культиватора на различных скоростях, показав, что увеличение скорости ножевых барабанов повышает эффект крошения почвы и не зависит от геометрии ножа [16].
Для повышения эффективности ротационной вспашки на засоленных землях в этой статье представлена конструкция высокоскоростного ротационного культиватора, которая сочетает требования к посадке арахиса в засоленном сельскохозяйственном районе Биньхай. Эта статья включает теоретический анализ траектории движения культиватора и операции резания почвы, конструкции и ключевых компонентов ножевого барабана культиватора в сочетании с дискретно-элементным моделированием и ортогональным центральным комбинированным испытанием для получения оптимальной комбинации параметров высокоскоростного ротационного культиватора и проверки полевых сравнительных испытаний, предоставляя справочный материал для технологии подготовки семенного ложа арахиса на засоленно-щелочных землях района Биньхай.
2. Конструкция машины и рабочий процесс
2.1. Общая конструкция машины
Как показано на Рисунке 1, конструкция высокоскоростного ротационного культиватора оснащена ножевым барабаном ротационного культиватора, который симметрично установлен на выходных валах с обеих сторон редуктора и закреплен на раме. Ножи ротационного культиватора расположены по симметричной спирали на оси ножей. Угол подъема спирали соседних ножей на той же спирали составляет 15°. На одной почвенной плоскости расположены четыре ножа, каждый из которых разделен углом 90°, а направление вращения ножевого барабана является прямым, то есть направление вращения ножевого барабана совпадает с направлением движения трактора.
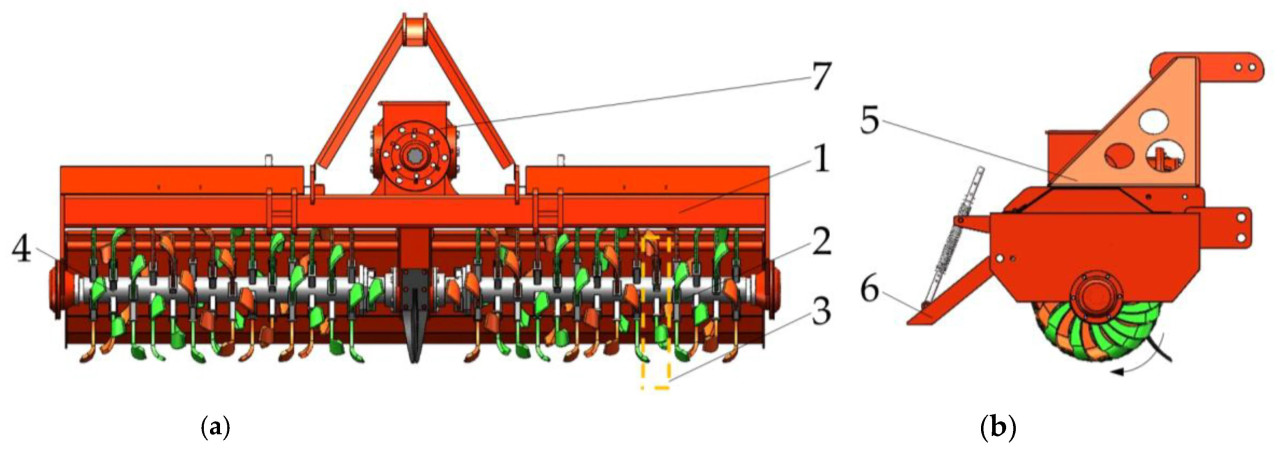
Рисунок 1. Конструкция высокоскоростного ротационного культиватора. (1) Рама; (2) правый ножевой барабан; (3) одна плоскость резания почвы; (4) левый ножевой барабан; (5) навесная рама; (6) волочильная плита; (7) редуктор; (a) главный вид; (b) вид сбоку.
2.2. Рабочий процесс
Из схемы рабочего процесса высокоскоростного ротационного культиватора на Рисунке 2 — при работе культиватора передний конец высокоскоростного культиватора соединяется с валом отбора мощности трактора через карданный вал. Трактор передает мощность на редуктор через задний выходной вал, а редуктор распределяет мощность на ножевой барабан культиватора. Чтобы адаптироваться к поступательной скорости трактора, редуктор обычного культиватора систематически спроектирован таким образом, чтобы он мог соответствовать требованиям высокоскоростной работы машины и приводить во вращение ножевой барабан для обработки почвы [16,17,18].
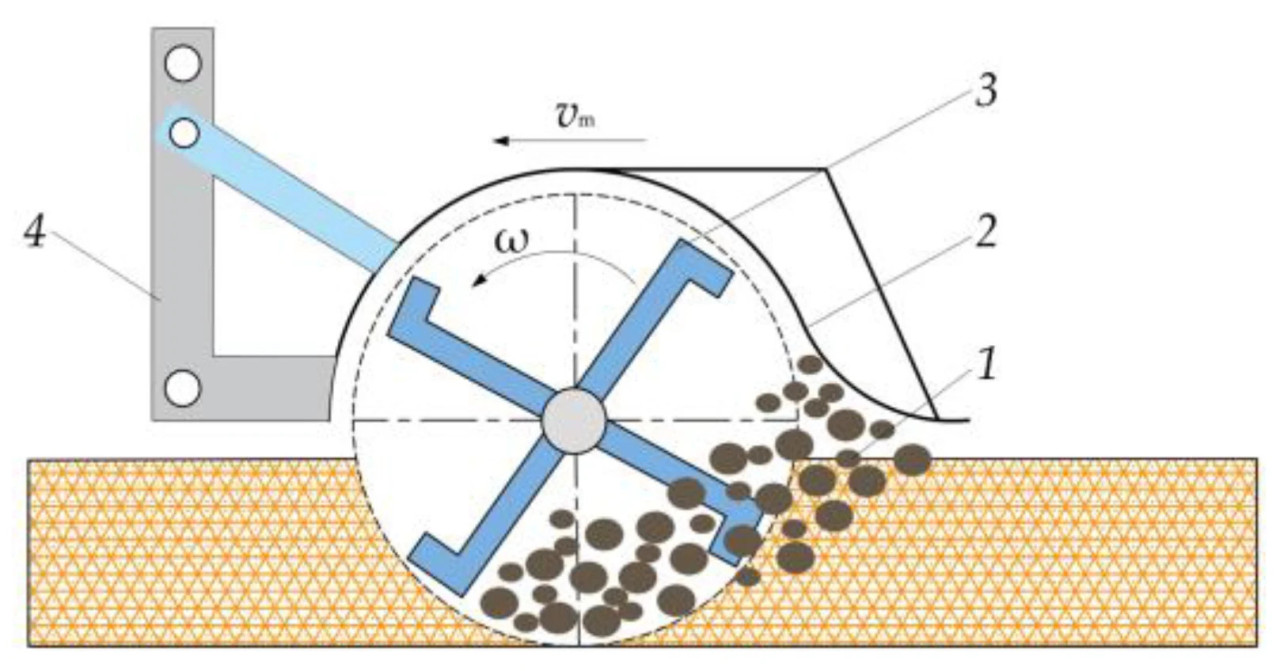
Рисунок 2. Схема рабочего процесса высокоскоростного ротационного культиватора. (1) Почвенный комок; (2) волочильная плита; (3) нож; (4) рама.
Нож ротационного культиватора непрерывно режет, разрушает, смешивает и отбрасывает назад почву и солому на необработанном участке, постепенно разделяя почву на три части: зону ожидания, обработанную зону и необработанную зону. Плита непрерывно скребет и разрушает почву в обработанной зоне, обеспечивая формирование мелкой и ровной поверхности почвы вдоль направления движения культиватора.
3. Конструкция параметров ключевых механизмов
3.1. Конструкция трансмиссии
Частота вращения ножей ротационного культиватора играет ключевую роль в степени крошения почвы и выровненности поверхности. Чтобы соответствовать требованиям к степени крошения почвы и выровненности поверхности после ротационной вспашки в условиях высокоскоростного движения, была проведена системная конструкция редуктора ротационного культиватора. Конструкция и анализ редуктора гарантируют, что ножевой барабан получает достаточную частоту вращения, поддерживая качество обработки почвы культиватором в состоянии высокоскоростного движения. Схема трансмиссии редуктора, показанная на Рисунке 3, имеет вал 1 в качестве входного вала мощности от заднего выходного вала трактора к малой конической шестерне 2; малая коническая шестерня 2 и коническая шестерня ведомого вала 3 сцепляются для передачи мощности; прямозубая шестерня 4 и коническая шестерня 3 соосны, поэтому прямозубая шестерня 4 и прямозубая шестерня главного вала 5 сцепляются для передачи мощности; вал ножевого барабана 5, прямозубая шестерня 6 и прямозубая шестерня главного вала 5 сцепляются для передачи мощности на ножевые барабаны, приводя их во вращение.
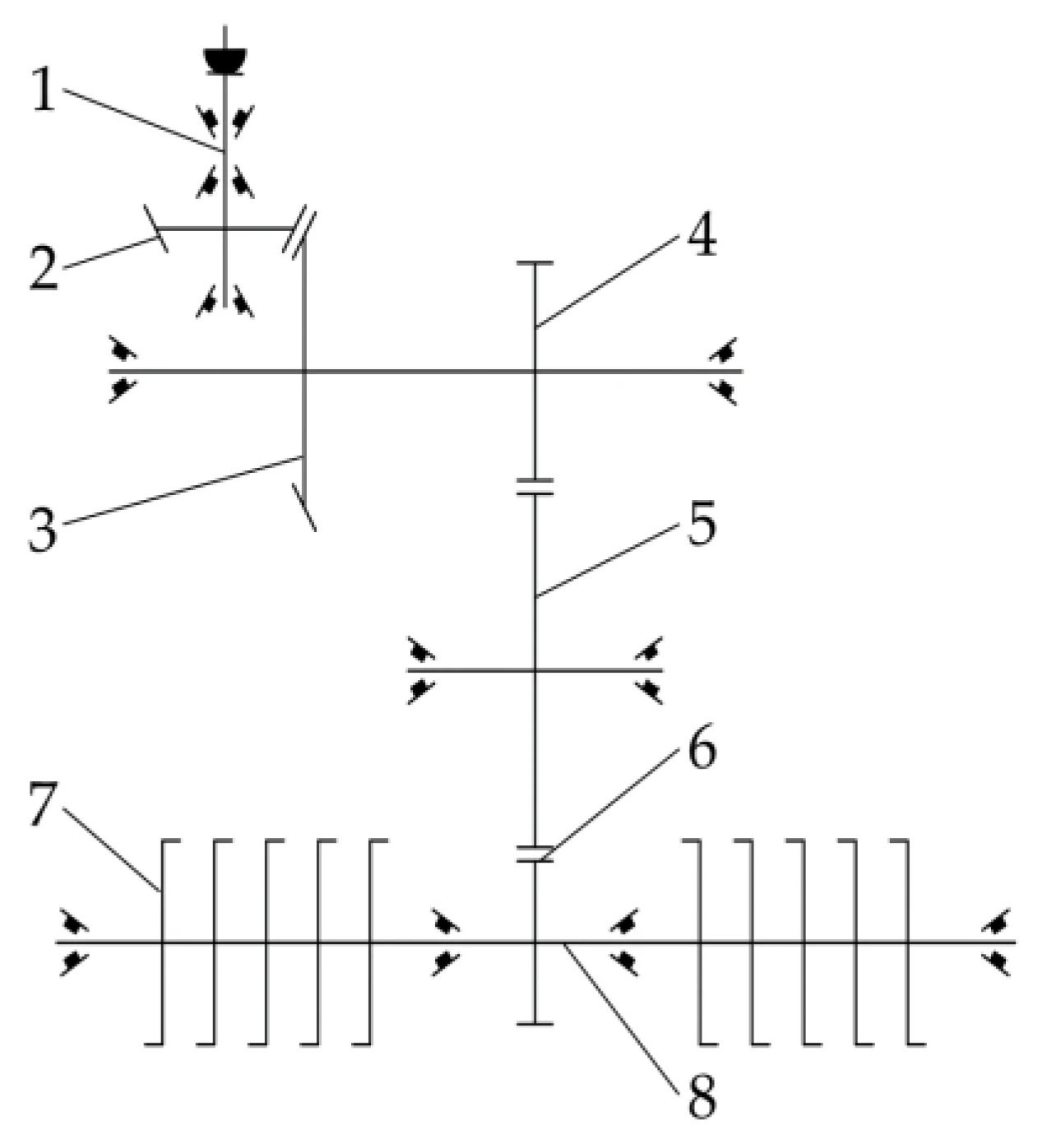
Рисунок 3. Схема трансмиссии. (1) Входной вал мощности; (2) малая коническая шестерня; (3) большая коническая шестерня; (4–6) приводные прямозубые шестерни; (7) нож; (8) ножевой вал.
Чтобы обеспечить частоту вращения ножевого барабана, необходимую для высокоскоростного движения ротационного культиватора, при неизменной конструкции редуктора в этой статье проведена системная разработка трансмиссии высокоскоростного ротационного культиватора. Основное передаточное число трансмиссии увеличено для удовлетворения требований высокоскоростной работы ротационного культиватора. Передаточное число в редукторе показано в формуле (1), как следует:

где n_in — частота вращения входного вала; n_out — частота вращения выходного вала; z_2 — количество зубьев ведомой шестерни; z_1 — количество зубьев ведущей шестерни.
3.2. Механический анализ и конструкция параметров ротационного культиватора
Абсолютное движение ножа ротационного культиватора в рабочем процессе включает синтез двух видов движения — одно из них прямолинейное движение ножевого барабана при его движении вперед с тракторными орудиями, а другое — круговое движение ножа вокруг оси ножевого барабана в процессе ротационной обработки. Абсолютное движение ножа синтезируется из этих двух движений, то есть траектория острия ножа представляет собой трохоиду [19].
Когда радиус вращения ножа равен R, угловая скорость вращения — ω, поступательная скорость машины — υ_m, начальный центр вращения O ножевого барабана является началом координат, направление движения машины совпадает с осью x, а ось y соответствует направлению силы тяжести, устанавливается система координат ножа ротационного культиватора, как показано на Рисунке 4.
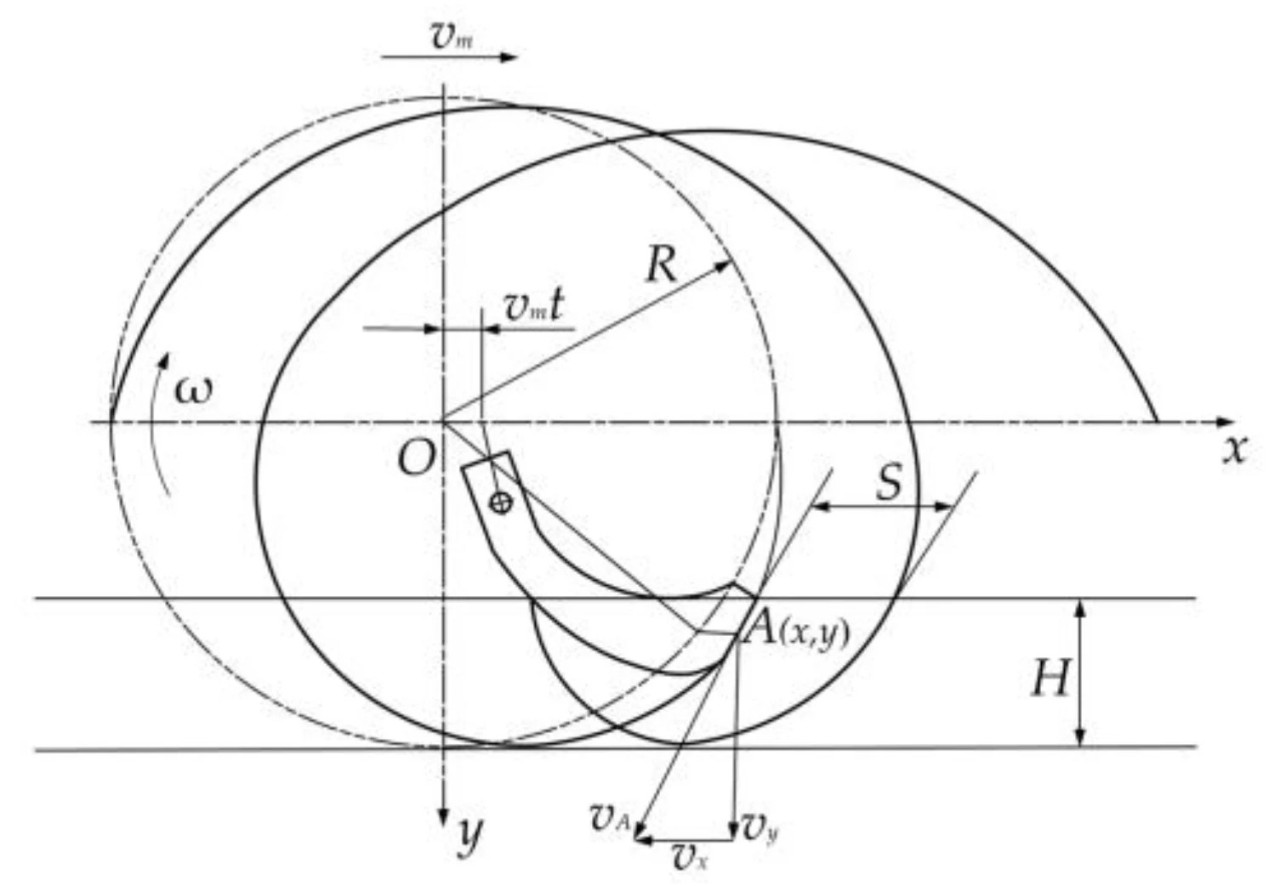
Рисунок 4. Система координат ротационного ножа.
Из Рисунка 4 параметрическое уравнение траектории конца ножа ротационного культиватора дается следующим образом:

где v_m — поступательная скорость машины, м/с; ω — угловая скорость вращения ножа ротационного культиватора, рад/с; t — время движения ножа, с.
Скорость движения конца ножа составляет:

Следовательно, абсолютная скорость движения конца ножа составляет:

Окружная скорость конца ножа составляет:

Пусть λ = v_p/v_m = Rω/v_m, размер λ оказывает важное влияние на траекторию ножа ротационного культиватора и рабочие условия, λ относится к скоростному коэффициенту ротационного культиватора, который подставляется в уравнение (6) следующим образом:

Когда λ < 1, то есть v_p < v_m, независимо от того, в каком состоянии движется нож, горизонтальная скорость конца ножа всегда совпадает с направлением движения культиватора. В этом случае траектория ножа представляет собой укороченную трохоиду. Нож не может резать почву назад, что приводит к забиванию и выталкиванию почвы, и культиватор не может работать нормально.
Когда λ > 1, горизонтальная скорость конца ножа противоположна направлению движения культиватора, и траектория ножа следует удлиненной трохоиде. В этом случае нож может нормально резать почву назад, позволяя культиватору работать нормально.
Следовательно, условием, обеспечивающим нормальную работу ротационного культиватора, является λ > 1, то есть окружная скорость больше поступательной скорости культиватора.
Для эффективного резания почвы траектория ножа представляет собой синтез поступательного и вращательного движений и соответствует требованиям трохоиды [20]. Как показано на Рисунке 5, для операции резания почвы ротационным ножом площадь резания почвы S в рабочем цикле каждого ножа включает площадь криволинейного треугольника S1, ограниченную точками x1, x2 и x4; прямоугольную площадь S2, ограниченную точками x1, x3, x4 и x5, за вычетом площади криволинейного треугольника S3, ограниченной точками x2, x3 и x5.
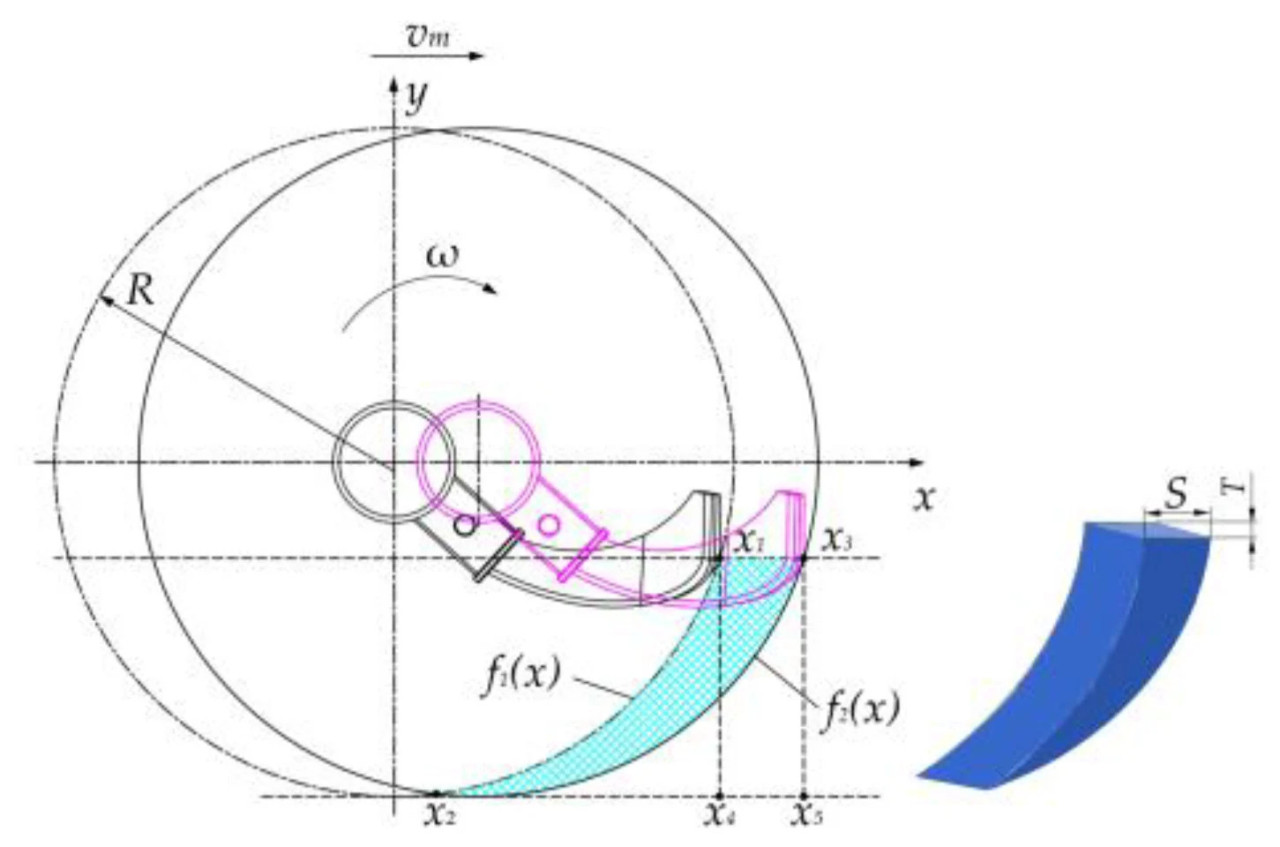
Рисунок 5. Операция резания почвы ротационным ножом.
Точка x1 — первая точка входа в рабочем цикле конца ножа, точка x3 — вторая точка входа, а точка x2 — точка пересечения двух резов в рабочем цикле ножа, который отрезает почву и завершает один рабочий цикл. Пусть уравнение кривой в точке x1x2 будет f1(x), уравнение кривой в точке x2x3 будет f2(x), а площадь резания почвы одним ножом S будет следующей:

Параметрическое уравнение площади резания почвы S в рабочем цикле одного ножа может быть получено из уравнения (5) следующим образом:

Уравнение для момента прохождения ножом через каждую конечную точку дается следующим образом:

Шаг резания оказывает значительное влияние на качество разрушения почвы ножами, стабильность глубины обработки, ровность дна борозды и выровненность поверхности почвы. Площадь резания между двумя соседними ножами связана со временем и расстоянием последовательного входа ножей в почву в рабочем цикле [21,22]. Уравнение взаимосвязи шага резания почвы S имеет следующий вид:

Взаимосвязь между моментами пересечения резов почвы в рабочем цикле ножа может быть выведена следующим образом:

где s — шаг резания, z — количество ножей в одной почвенной плоскости.
Качество работы ротационного культиватора в состоянии высокоскоростного движения имеет важную взаимосвязь с частотой вращения ножевого барабана и количеством ножей в одной почвенной плоскости. Согласно агротехнике выращивания арахиса в регионе дельты Желтой реки, для улучшения структуры пахотного слоя почвы, увеличения её пористости и повышения укореняемости и всхожести арахиса, при ротационной обработке выбирается оптимальная глубина обработки около 10–14 см. В то же время, для обеспечения урожайности арахиса, операции ротационной обработки необходимо выполнять сразу после уборки предыдущей культуры. В это время влажность почвы обычно находится в диапазоне 20–25%, и уплотнение почвы значительно. Чтобы соответствующим образом уменьшить шаг резания почвы для улучшения эффекта крошения, шаг резания почвы S для ножей ротационного культиватора выбирается в диапазоне 6–10 см. Для данного испытания был выбран нож IIT195, который обладает лучшими режущими характеристиками и устойчивостью к наматыванию сорняков и соломы. Согласно GB T5669-2017 [23]: Rotary Tiller — Rotary Blades and Blade Holders (Национальный технический комитет по стандартизации сельскохозяйственной техники: Пекин, Китай, 2017), рабочая ширина составляет 50 мм, радиус вращения ножевого барабана — 195 мм, угол изгиба передней режущей поверхности — 120°. Согласно GB T5668-2017 [24]: Rotary Tiller (Стандартизационное управление Китая: Пекин, Китай, 2017), значение n находится в диапазоне от 150 до 350 об/мин.
Всесторонне анализируя вышеизложенное, частота вращения ножевого барабана (150–350 об/мин), глубина обработки (10–14 см) и поступательная скорость машины (4–8 км/ч) были выбраны в качестве факторов испытания производительности высокоскоростного ротационного культиватора.
3.3. Анализ расположения ножей и угла подъема спирали
Ножевой барабан разделен на левый и правый ножевые барабаны относительно редуктора. Ножи расположены на ножевом валу по спирали, поэтому во время работы ножи совершают спиральное движение. Согласно исследованиям, различные углы спирального расположения ножей оказывают различное влияние на нарушение почвы [25]. По этой причине угол подъема спирали и расположение ножей определяются в соответствии с эксплуатационными требованиями к высокоскоростным ротационным культиваторам.
Для больших полей количество ножей в одной плоскости установки не должно быть слишком большим, иначе ножи будут наматывать солому, что приведет к чрезмерному сопротивлению ротационной обработке и явлению забивания, в конечном итоге приводя к увеличению потребляемой мощности и плохим результатам обработки.
Расположение ножей на ножевом барабане является одним из важнейших факторов, влияющих на качество обработки и потребляемую мощность.
Скоростной коэффициент ротационной обработки и шаг резания являются основными показателями для оценки эксплуатационных показателей и качества крошения почвы. Скоростной коэффициент ротационной обработки λ составляет:

где R — радиус вращения ножа, мм; ω — угловая скорость вращения ножа, рад/с.
Из уравнения (10) шаг резания почвы определяется как:

где n — частота вращения ножевого барабана, об/мин; z — количество ножей, шт.
Из-за λ > 1 обычно количество ножей, установленных в одной плоскости, составляет z ≥ 2. С увеличением количества ножей шаг резания уменьшается, и эффект крошения также хорош, поэтому z = 4, четыре ножа установлены равномерно, и ножевые лезвия расположены на расстоянии 90° друг от друга.
В то время как нож режет почву, конец ножа разрывает почву вблизи себя, и продольное установочное расстояние b′ должно быть больше рабочей ширины ножа b [26]. Рабочая ширина ножа показана на Рисунке 6.

где b′ — продольное установочное расстояние ножа, мм; b — рабочая ширина ножа, мм; Δb — продольный регулировочный зазор соседнего ножа, мм.
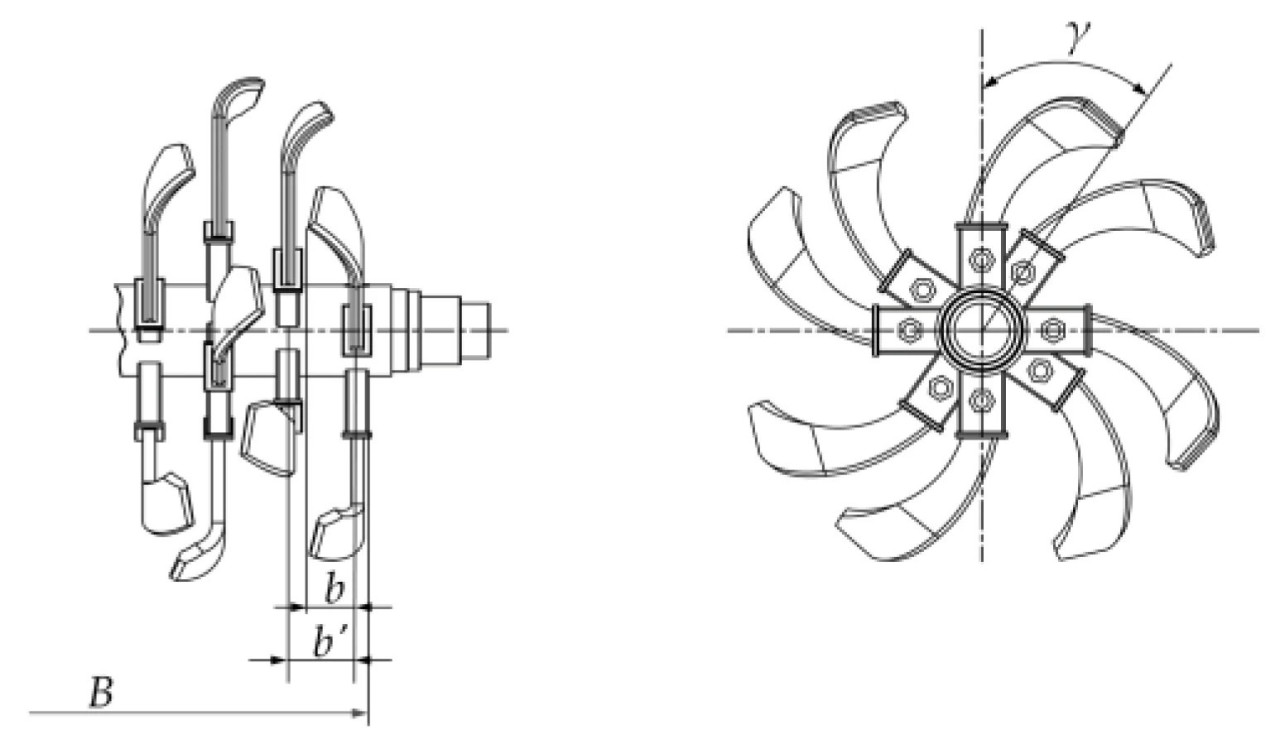
Рисунок 6. Расположение ножей.
Δb обычно используется в диапазоне 15–20 мм; в этой статье выбран нож IIT195 с рабочей шириной b 50 мм; чтобы избежать интерференции ножей, Δb был установлен равным 20 мм.
Общее количество ножей, установленных на ножевых барабанах, рассчитывается по уравнению (17).

где Z′ — общее количество ножей; B — эффективная длина одностороннего ножевого барабана, мм; z — количество ножей в одной плоскости установки, шт.
Общая рабочая ширина орудия составляет 2150 мм, а рабочая ширина B одностороннего рабочего ножевого барабана — 1020 мм. Подставляя в уравнение (17), общее количество ножей для установки составляет 96, то есть 48 ножей устанавливаются на каждую сторону ножевого барабана.
Чтобы высокоскоростной ротационный культиватор соответствовал требованиям к крошению почвы, с увеличением количества ножей угол подъема спирали напрямую влияет на энергопотребление культиватора, а сопротивление почвы является основной причиной увеличения потребляемой мощности при ротационной обработке [27].
Сопротивление почвы P для ротационного культиватора может быть выражено уравнением (16) следующим образом:

где P — сопротивление почвы для ножа, Н; x_i, y_j, z_k — горизонтальные составляющие силы в трех направлениях для ножа; i, j, k — единичные векторы.
Нож на ножевом валу установлен в форме спирали, причем два ножевых барабана установлены симметрично. Угол подъема спирали ножа одинаков; в это время на нож при работе воздействуют мгновенные горизонтальные составляющие силы в трех направлениях, как показано в формуле (17):
где z_1 и z_2 — количество левых и правых изогнутых ножей в мгновенной работе; x_i1, y_j1, z_k1 — горизонтальные составляющие силы сопротивления почвы в трех направлениях на одном ноже соответственно.
Поскольку ножи расположены симметрично, боковые горизонтальные составляющие силы могут взаимно компенсироваться. Но с увеличением угла подъема спирали количество резов почвы ножом в единицу времени уменьшается, что может легко вызвать вибрацию машины, приводящую к снижению качества резания почвы. Учитывая, что количество ножей в одной плоскости установки ножа равно четырем, можно выбрать несколько меньший угол подъема спирали [27]. Однако, если угол подъема спирали слишком мал, это вызовет увеличение сопротивления резанию почвы и легкое забивание во время работы, поэтому угол подъема спирали соседних ножей на одной спирали выбран равным 15°. Чтобы избежать переменной нагрузки на нож при резании почвы и импульсной вибрации машины при работе, при установке ножей за центр принимается редуктор, используется симметричное спиральное расположение ножей для их установки и фиксации. В одной плоскости установки равномерно устанавливаются четыре ножа, а угол установки составляет 90°. Схема установки ножей показана на Рисунке 7.
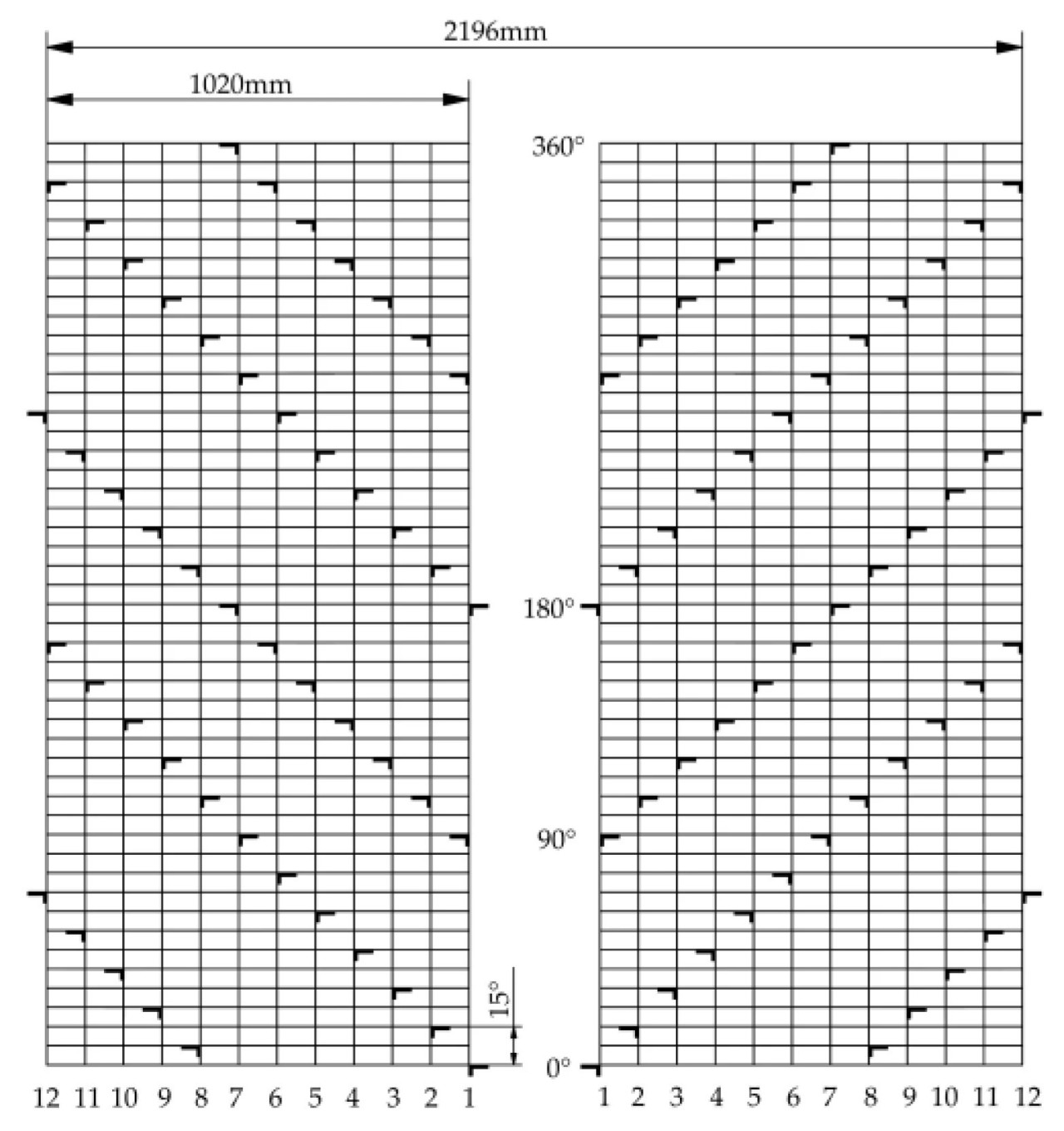
Рисунок 7. Схема установки ножей.
4. Дискретно-элементное моделирование
Используя программное обеспечение EDEM 2023, была создана дискретно-элементная модель высокоскоростного ротационного культиватора. Уравнения регрессии ключевых факторов, полученные из вышеприведенного анализа, степень крошения почвы и выровненность поверхности после обработки были установлены с помощью ортогонального испытания, чтобы проанализировать влияние взаимодействия различных факторов на степень крошения почвы и выровненность поверхности, получив оптимальную комбинацию факторов, которая предоставляет основу для последующего опытного производства культиватора.
4.1. Моделирование и конструкция эксперимента
Это имитационное испытание в основном моделировало обработку щелочной почвы на экспериментальном поле Национальной демонстрационной зоны сельскохозяйственных высоких технологий дельты Желтой реки города Дунъин, провинция Шаньдун. Выбранная контактная модель частиц почвы — Hertz–Mindlin with bonding; эта модель может имитировать связывание частиц почвы и образование связей между частицами до достижения предела разрыва связи [28,29].
Модель Hertz–Mindlin with bonding может выдерживать касательную силу F_t, нормальную силу F_n, нормальный момент T_n и касательный момент T_t на частицах до разрыва связи, то есть повреждения связи. Сила связи постепенно регулируется с нулевого временного шага; связь подвергается воздействию касательной и нормальной силы до достижения критического значения разрушения, с критическими касательными и нормальными напряжениями, как показано в уравнении (18).

где A — площадь контакта; J — момент инерции; R_B — радиус связи; F_t — касательная сила между частицами; F_n — нормальная сила между частицами; T_n и T_t — нормальный и касательный моменты между частицами.
Радиус частиц почвы установлен на 5 мм, радиус связующей связи — на 5,1 мм. Материал ножа культиватора — сталь 65 Mn, глубина обработки установлена на 14 см в соответствии с рабочими условиями. В модели был построен почвенный канал размерами (длина × ширина × высота) 3000 мм × 2200 мм × 300 мм, над почвенным каналом был установлен генератор частиц, и методом гравитационного осаждения было сгенерировано 5 792 000 частиц почвы, импортированных в упрощенную модель культиватора. Для параметров моделирования, на основе предварительного исследования механических свойств и контактных параметров засоленной почвы, были выбраны собственные параметры и контактные параметры каждого материала, необходимые для моделирования, для экспериментального определения [30,31,32,33,34,35,36,37,38]. Параметры контактной модели и контактные параметры моделирования показаны в Таблице 1 и Таблице 2.

Таблица 1. Параметры имитационной модели.
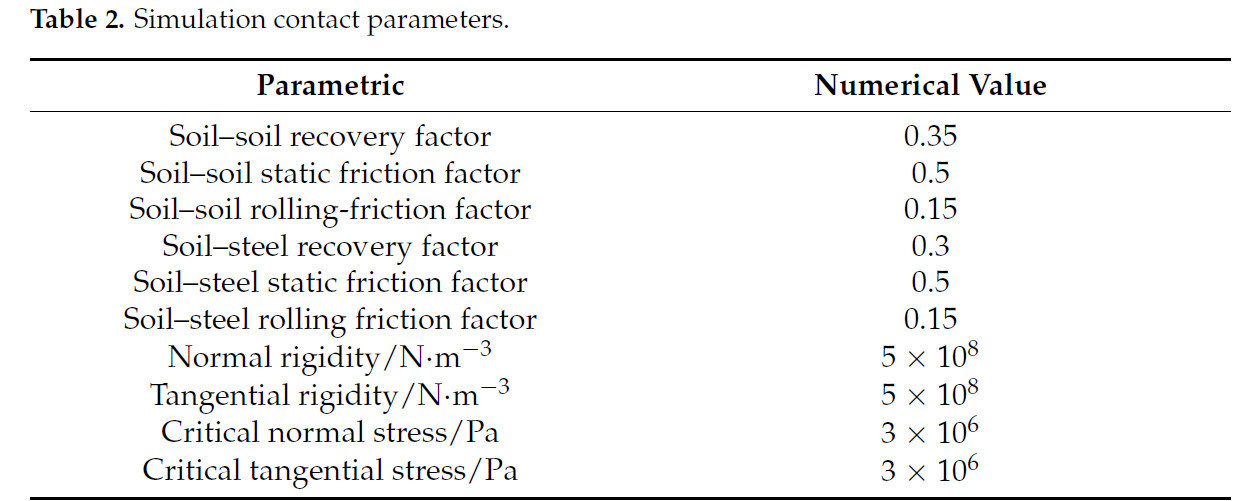
Таблица 2. Контактные параметры имитации.
Чтобы обеспечить непрерывное движение частиц почвы в процессе имитации работы машины, был установлен фиксированный временной шаг 3,74 × 10^−5, что составляет 15% от шага Рэлея, при этом размер ячейки сетки в 2,5 раза превышает радиус наименьших частиц. Было проведено моделирование полевой операции культиватора; процесс моделирования показан на Рисунке 8. Рисунок 9 показывает эффекты операции резания почвы культиватором в различные моменты времени в имитационном испытании. Рисунок 9a показывает момент работы культиватора на 1 с; Рисунок 9b, c показывают момент проникновения в почву на 2 с и момент стабилизированной работы на 3 с.
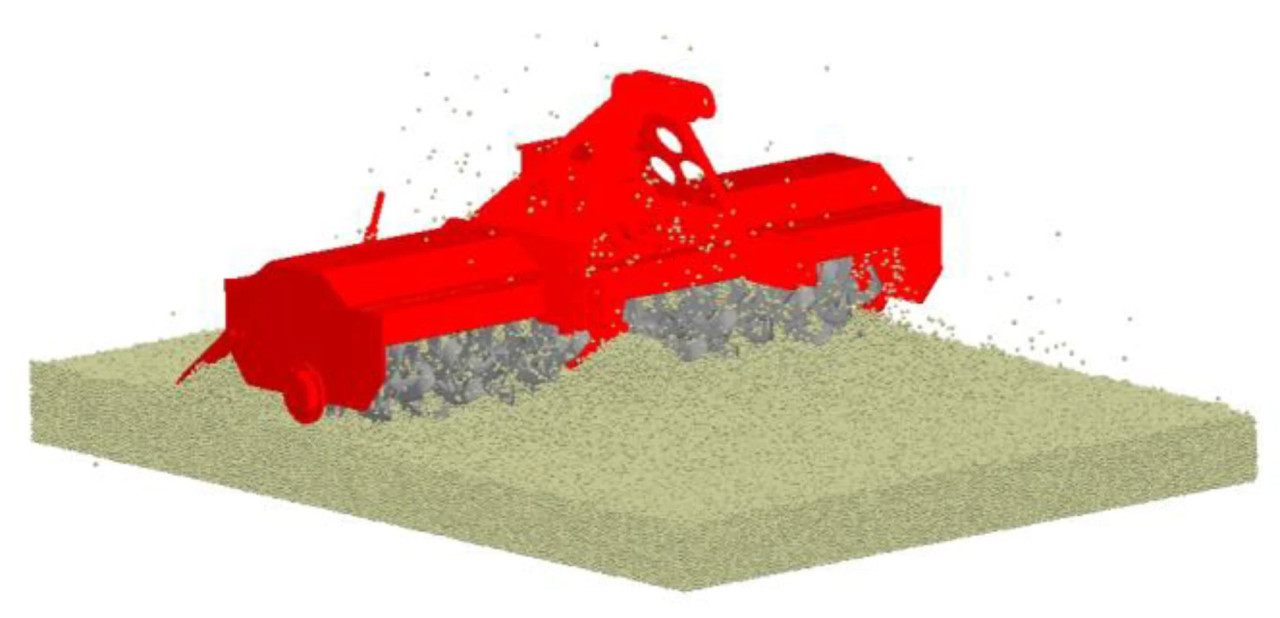
Рисунок 8. Моделирование работы ротационного культиватора.
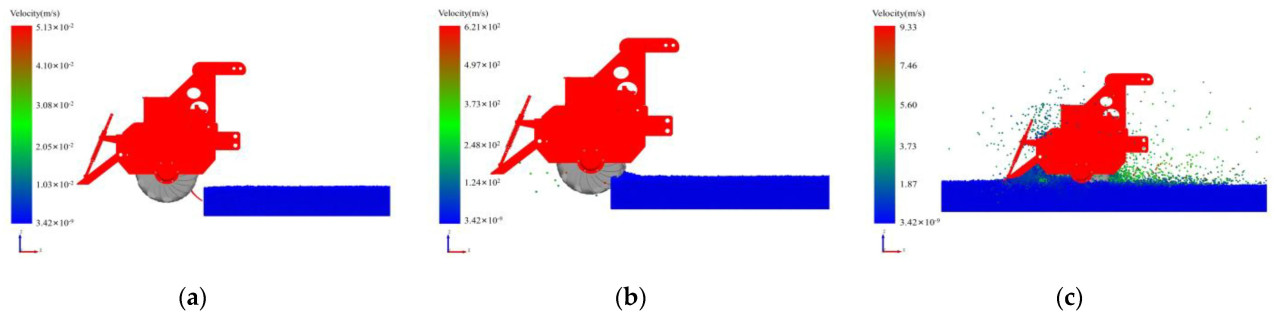
Рисунок 9. Эффекты работы ротационного культиватора в разные моменты времени. (a) 1 с; (b) 2 с; (c) 3 с.
Мы использовали программное обеспечение для конструирования экспериментов Design-Expert13 для реализации метода поверхности отклика и центрального комбинированного плана эксперимента (CCD). На основе предыдущего анализа в качестве факторов эксперимента были выбраны частота вращения ножевого барабана n, глубина обработки h и поступательная скорость орудия v_m. Был проведен трехуровневый квадратичный регрессионный ортогональный ротатабельный комбинированный план; кодирование факторов и уровни показаны в Таблице 3. В моделировании в качестве испытательных показателей были выбраны степень крошения почвы и выровненность поверхности.
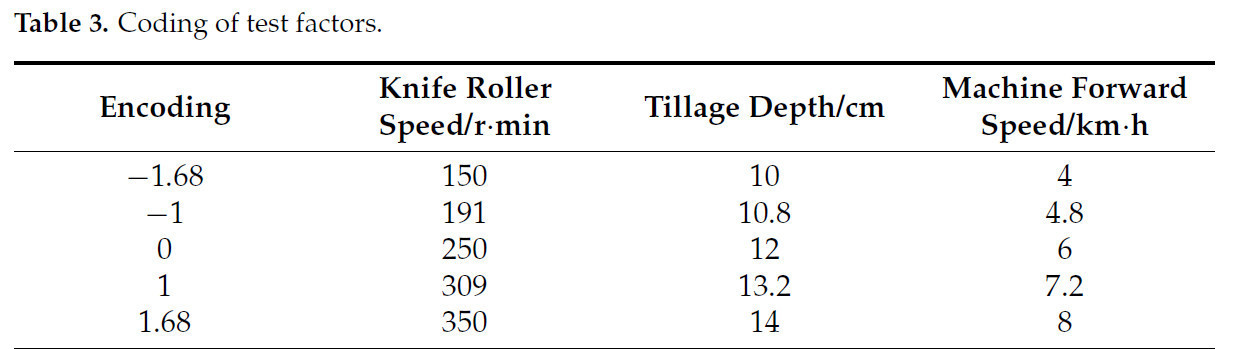
Таблица 3. Кодирование факторов испытания.
В соответствии с требованиями к определению степени крошения почвы, культиватор работает, разрушая внутренние связи почвенных комков, чтобы разбить их на мелкие частицы, причем максимальная длина стороны комка менее 40 мм считается качественным комком [26]. В настройках частиц EDEM частицы почвы связаны друг с другом связующими связями, и после завершения моделирования рассчитывается общее количество связей по сравнению с общим количеством разорванных связей для вычисления степени крошения почвы.
Выровненность поверхности после обработки определялась с использованием модуля Clipping программного обеспечения EDEM для случайного выбора среза толщиной 100 мм в задней части культиватора, как показано на Рисунке 10, метод сбора данных случайного среза. Координаты поверхностных частиц этого среза были извлечены и импортированы в программное обеспечение CAD 2021 для соединения координат поверхностных частиц сплайн-кривой для построения линии поверхности после вспашки [15]. Горизонтальная прямая линия была проведена через самую высокую точку в качестве базовой линии, и измерительные точки были отмечены с шагом 50 мм в пределах рабочей ширины 800 мм. Вертикальное расстояние от горизонтальной базовой линии до линии поверхности измерялось в каждой точке и записывалось как a_i. Вычисляется среднее значение вертикального расстояния a_m и стандартное отклонение U для каждой точки.

где n — количество точек на одно измерение.
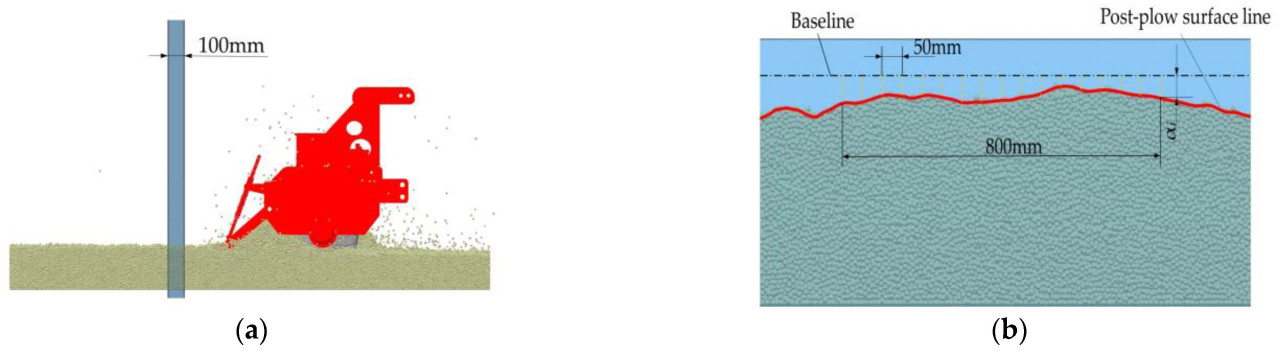
Рисунок 10. Схема метода сбора данных для случайно выбранных срезов. (a) Положение среза; (b) метод измерения.
Каждый набор испытаний измерялся трижды, и выровненность поверхности выражается как среднее стандартного отклонения U_m.
4.2. Анализ результатов моделирования
Степень крошения почвы и выровненность поверхности культиватора были получены путем выполнения 20 наборов имитационных испытаний на EDEM. Результаты измерений показаны в Таблице 4, где A, B и C являются кодированными значениями факторов испытаний: частота вращения ножевого барабана, глубина ротационной обработки и поступательная скорость машины. Результаты экспериментов были обработаны с использованием программного обеспечения Design-Expert13 для анализа значимости влияния частоты вращения ножевого барабана n, об/мин, глубины обработки h, см, и поступательной скорости агрегата v, км/ч, на степень крошения почвы (%) и выровненность поверхности (мм); были подобраны уравнения регрессии для получения модели отклика измеренных показателей.
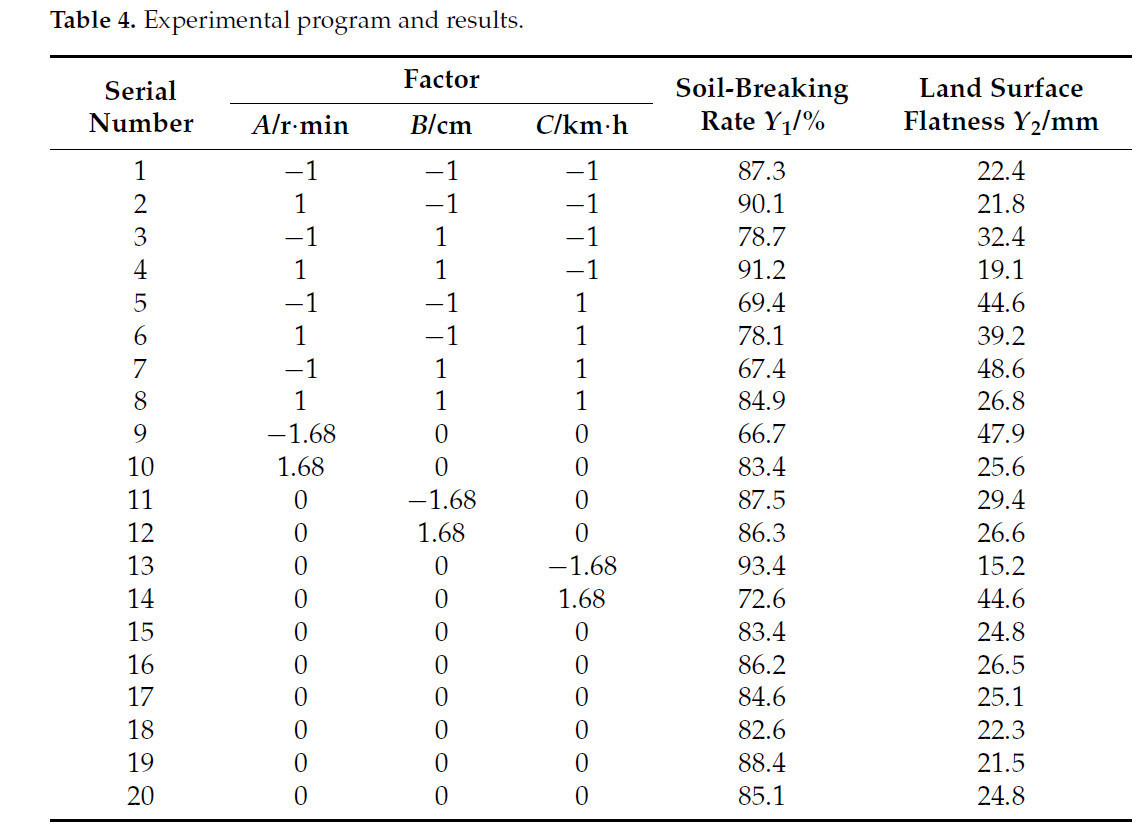
Таблица 4. План и результаты эксперимента.
Результаты испытаний в Таблице 4 были проверены на значимость и проанализированы с помощью дисперсионного анализа. Был выбран квадратичный полиномиальный регрессионный уравнение для получения результатов проверки значимости регрессионных моделей степени крошения почвы в Таблице 5 и выровненности поверхности в Таблице 6. Коэффициенты регрессии в регрессионных моделях были подвергнуты F-критерию и дисперсионному анализу для установления квадратичных полиномиальных регрессионных уравнений степени крошения почвы Y1 и выровненности поверхности Y2 от скорости ножевых барабанов, глубины обработки и поступательной скорости орудий соответственно:

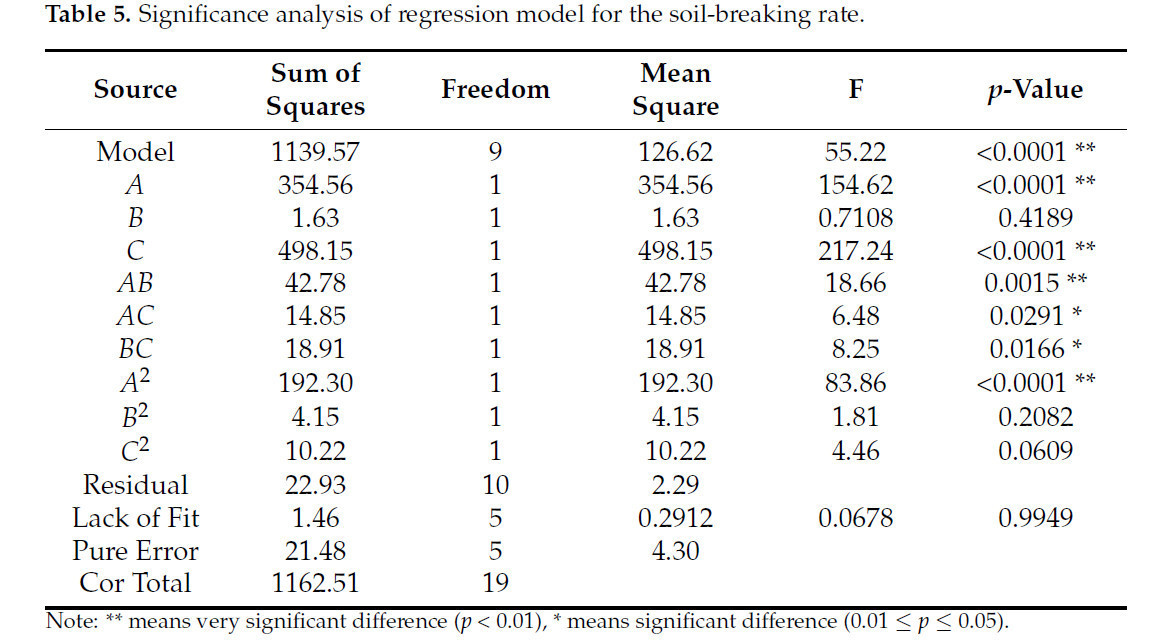
Таблица 5. Анализ значимости регрессионной модели для степени крошения почвы.
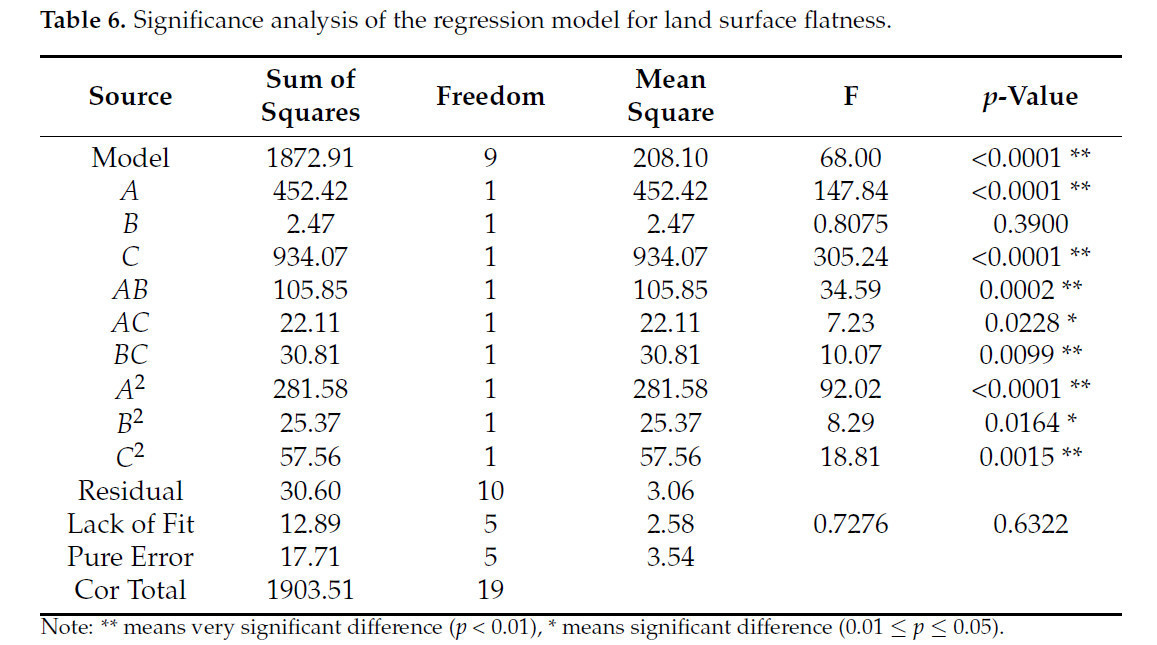
Таблица 6. Анализ значимости регрессионной модели для выровненности поверхности.
Как видно из Таблицы 5, значение значимости модели p для целевой функции Y1 составляет <0,0001, что меньше 0,01, указывая на то, что регрессионная модель высокозначима. Значение p члена неадекватности составляет 0,9949, что больше 0,05, свидетельствуя об отсутствии фактора неадекватности и о хорошей аппроксимации модели. Проанализированные пункты — A, C, AB и A^2 — оказали высокозначимое влияние на степень крошения почвы. AC и BC были значимыми членами, а B, B^2 и C^2 — незначимыми членами.
Как видно из Таблицы 6, значение значимости модели p для целевой функции Y2 составляет <0,0001, что меньше 0,01, указывая на то, что регрессионная модель высокозначима. Значение p члена неадекватности составляет 0,6322, что больше 0,05, свидетельствуя об отсутствии фактора неадекватности и о хорошей аппроксимации модели. Проанализированные пункты — A, C, AB, BC, A^2, C^2 — оказали высокозначимое влияние на выравнивание поверхности. Члены B, AC и B^2 были значимыми членами.
Значение F в таблице указывает на влияние каждого фактора на испытательные показатели; чем больше значение F, тем больше влияние на испытательные показатели. Как видно из Таблицы 5 и Таблицы 6, влияние каждого фактора на степень крошения почвы Y1 и выровненность поверхности Y2 располагается в следующем порядке от наибольшего к наименьшему: C — поступательная скорость машины, A — частота вращения ножевого барабана, B — глубина обработки.
Анализ поверхности отклика
Из регрессионного анализа значимости степени крошения почвы и выровненности поверхности видно, что частота вращения ножевого барабана и глубина обработки, глубина обработки и поступательная скорость агрегата, а также поступательная скорость агрегата и глубина обработки оказывают взаимодействующее влияние на степень крошения почвы; частота вращения ножевого барабана и глубина обработки, частота вращения ножевого барабана и поступательная скорость агрегата, а также глубина обработки и поступательная скорость агрегата оказывают взаимодействующее влияние на выровненность поверхности; поверхности отклика построенных взаимодействий показаны на Рисунке 11.
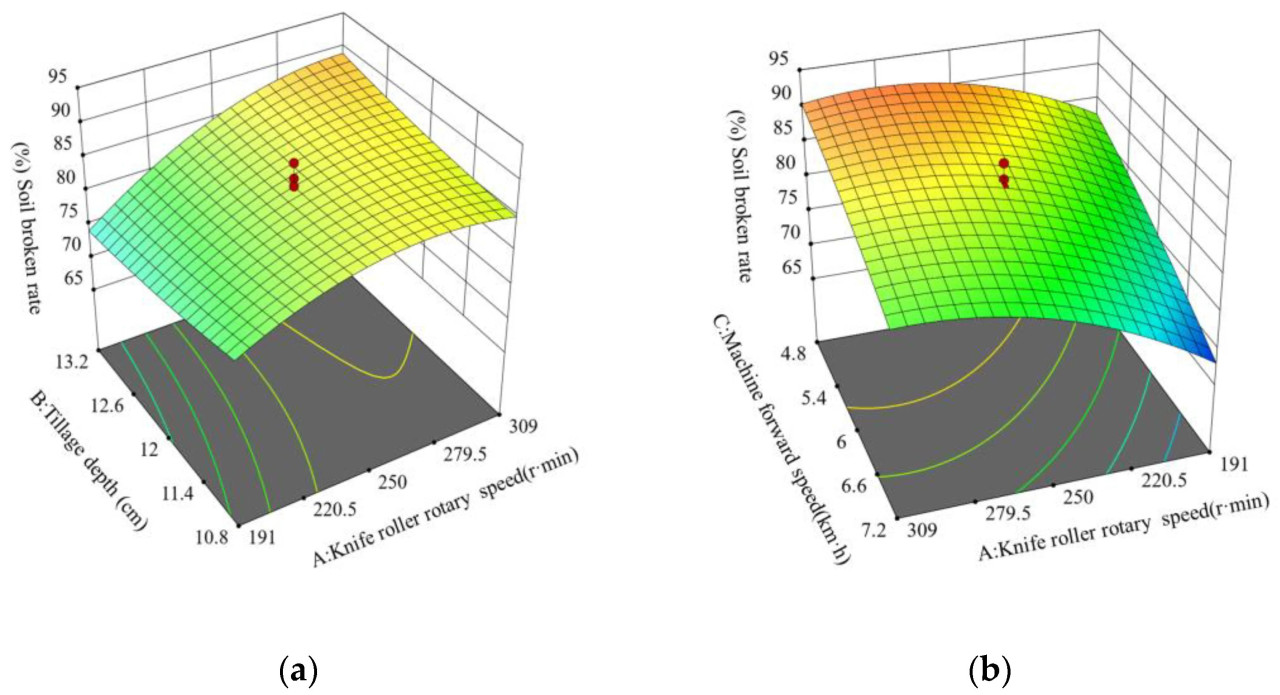
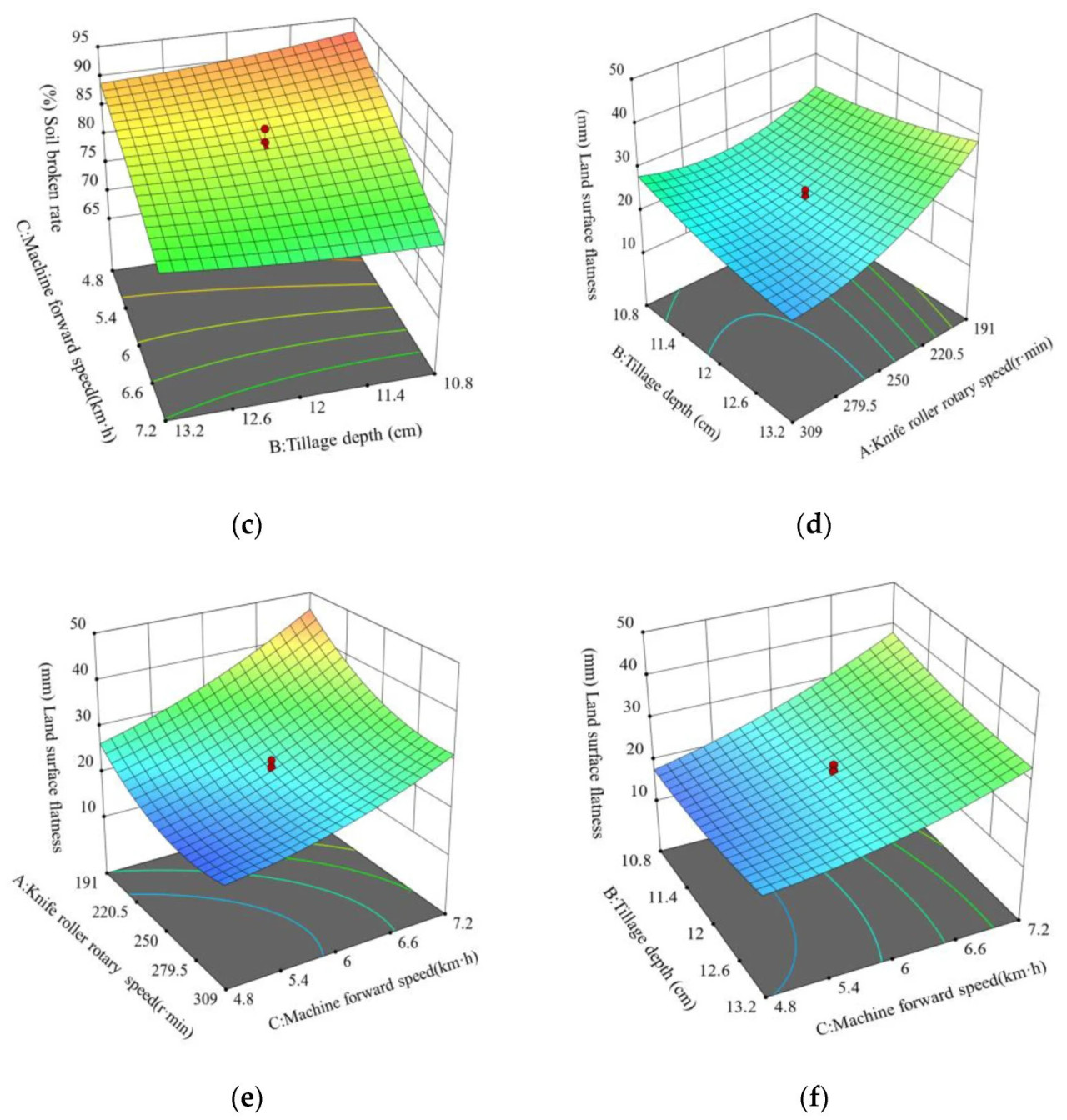
Рисунок 11. Поверхности отклика влияния взаимодействий факторов на степень крошения почвы и выровненность поверхности. (a) Поверхность отклика взаимодействия факторов A и B на степень крошения почвы. (b) Поверхность отклика взаимодействия факторов A и C на степень крошения почвы. (c) Поверхность отклика взаимодействия факторов B и C на степень крошения почвы. (d) Поверхность отклика взаимодействия факторов A и B на выровненность поверхности. (e) Поверхность отклика взаимодействия факторов A и C на выровненность поверхности. (f) Поверхность отклика взаимодействия факторов B и C на выровненность поверхности.
Из Рисунка 11a видно, что при центральном уровне поступательной скорости агрегата, при определенной глубине обработки, наблюдается значительное увеличение степени крошения почвы с увеличением частоты вращения ножевого барабана; при определенной частоте вращения ножевого барабана, с уменьшением глубины обработки степень крошения почвы возрастает. Как видно из Рисунка 11b, когда глубина обработки находится на центральном уровне, степень крошения почвы увеличивается с уменьшением поступательной скорости агрегата и увеличением частоты вращения ножевого барабана. Как видно из Рисунка 11c, при центральном уровне частоты вращения ножевого барабана наблюдается значительное увеличение степени крошения почвы по мере уменьшения поступательной скорости агрегата и уменьшения глубины обработки. Из Рисунка 11d видно, что при центральном уровне поступательной скорости агрегата, когда частота вращения ножевого барабана определена, наблюдается значительное уменьшение выровненности поверхности с уменьшением глубины обработки и увеличением частоты вращения ножевого барабана. Из Рисунка 11e видно, что наблюдается значительное уменьшение выровненности поверхности, когда частота вращения ножевых барабанов увеличивается, а поступательная скорость агрегата уменьшается, когда глубина обработки находится на центральном уровне. Из Рисунка 11f, когда частота вращения ножевого барабана находится на центральном уровне, видно, что при уменьшении поступательной скорости агрегата и глубины обработки выровненность поверхности имеет тенденцию сначала уменьшаться, а затем увеличиваться.
4.3. Оптимальные комбинации параметров для высокоскоростных ротационных культиваторов
С помощью квадратичного ортогонального ротатабельного комбинированного испытания необходимо определить оптимальную комбинацию параметров, влияющих на степень крошения почвы и выровненность поверхности, тем самым улучшая качество ротационной обработки и подготовки почвы. Уравнение целевой функции и функции ограничения определяется следующим образом:

где max Y1(A, B, C) — целевая функция, min Y2(A, B, C) — функция ограничения.
В соответствии с моделью целевой функции и функции ограничения, уравнение регрессии (21) было оптимизировано с использованием программного обеспечения Design-Expert13 для получения оптимальных комбинаций параметров факторов, влияющих на степень крошения почвы и выровненность поверхности. Когда частота вращения A ножевого барабана составляет 309 об/мин, глубина обработки B — 13,2 см, поступательная скорость агрегата C — 4,8 км/ч, степень крошения почвы составляет 91,3%, а выровненность поверхности — 17,4 мм. Учитывая, что частоту вращения ножевого барабана 309 об/мин непросто установить (с точки зрения передачи редуктора), частота вращения ножевого барабана была определена как 310 об/мин. Для проверки точности результатов оптимизации была использована оптимальная комбинация параметров для повторного проведения моделирования. Были определены средние значения из трех раз, в результате чего оптимальная степень крошения составила 90,6%, а выровненность поверхности — 18,2 мм. Результаты имитационных испытаний были в основном такими же, как теоретические результаты, что указывает на точность уравнения регрессии.
4.4. Транзиентный анализ конических шестерен редуктора
Мы определили частоту вращения ножевого барабана 310 об/мин и заново подобрали шестерни в редукторе, чтобы изменить передаточное число и достичь согласованной частоты вращения барабана. Согласно процессу ротационной обработки, силовая ситуация деталей трансмиссии показывает, что прямозубые конические шестерни и главный вал, сцепляющийся с коническими шестернями, наиболее подвержены отказу. Основным источником вибрационной нагрузки является коническая шестерня. Из-за изменения её передаточного числа коническая шестерня претерпевает значительные изменения. Поэтому динамические нагрузки в основном зависят от конических шестерен, в то время как влиянием других шестерен в этом анализе можно пренебречь. Следовательно, была проведена транзиентная структурная имитация конических шестерен во время зацепления.
Мы отдельно создали модель каждой части, а затем собрали их. Коническая шестерня и главный вал после сборки показаны на Рисунке 12. Материалы конической шестерни и главного вала, использованные в этом испытании, — 20CrMnTi, с плотностью материала 7800 кг/м³, модулем упругости 2,07 × 10^11 Па и коэффициентом Пуассона 0,25. Свойства материала конической шестерни и главного вала определены в инженерной базе данных материалов ANSYS Workbench [39].
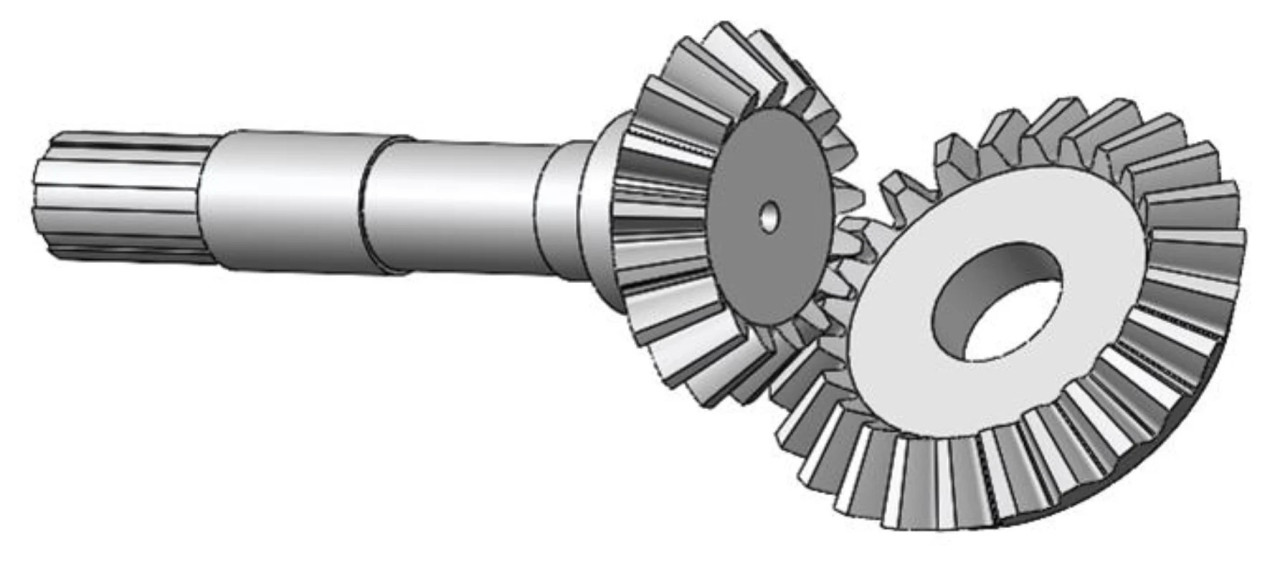
Рисунок 12. Геометрическая модель сборки конической шестерни и главного вала.
Точность зацепления определяет точность результатов анализа методом конечных элементов, и из-за сложной структуры конической шестерни в этом испытании для разделения была использована тетраэдрическая сетка [40]. Зацепление конических шестерен в основном зависит от поверхности зубьев для передачи движения и силы; поэтому зацепляющийся профиль зуба требует измельчения сетки; для более точного получения распределения напряжений между профилями зубьев размер ячейки сетки профиля зуба установлен на 1,5 мм. Путем контроля разделения общей и локальной сеток окончательное количество узлов сетки составило 322 068, а количество ячеек сетки — 186 889. Трехмерная модель сборки конической шестерни после наложения сетки показана на Рисунке 13.
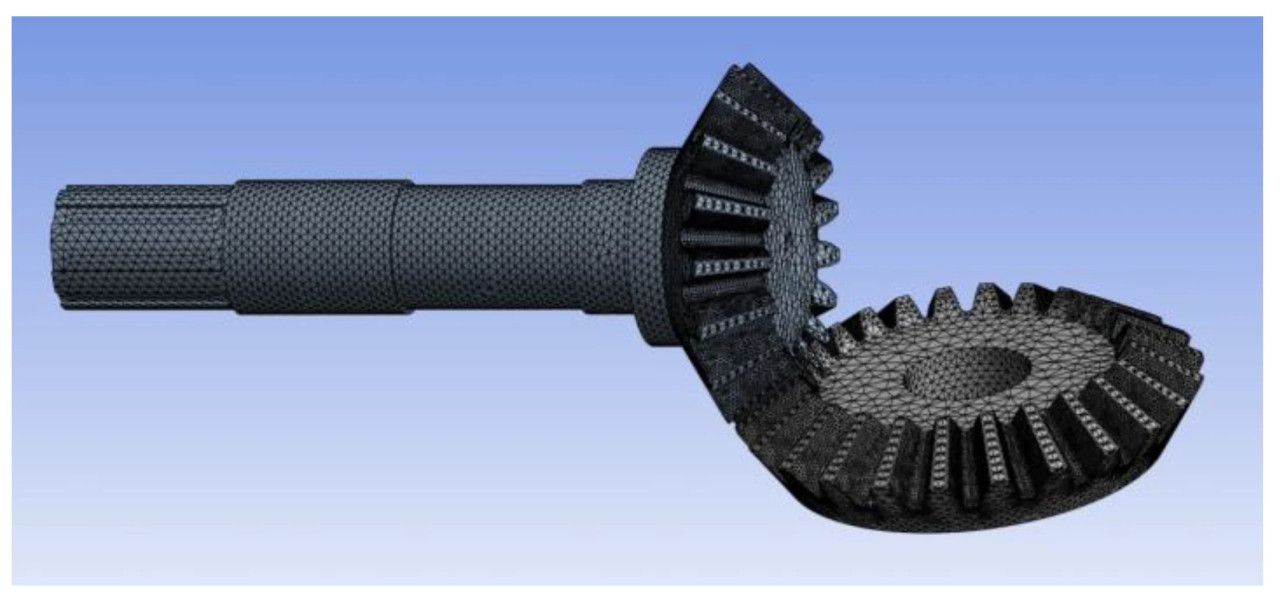
Рисунок 13. Наложение сетки на сборку.
Анализ результатов методом конечных элементов
Транзиентная динамическая имитация пары конических шестерен проанализирована и решена. Были получены карта максимальных эквивалентных напряжений (Рисунок 14a) и карта максимальных эквивалентных деформаций (Рисунок 14b) при 310 об/мин, как показано на Рисунке 14.
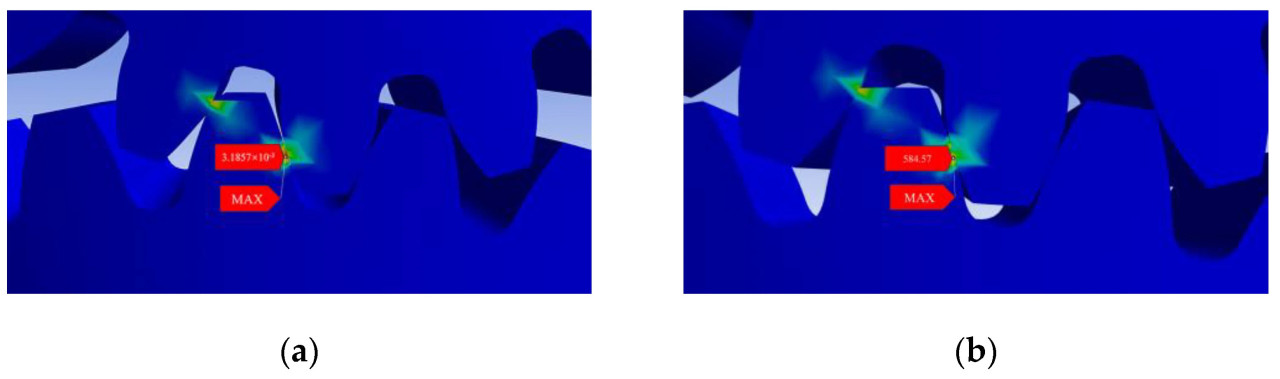
Рисунок 14. Карты транзиентной имитации. (a) Карта максимальных эквивалентных напряжений; (b) карта максимальных эквивалентных деформаций.
Из механики материалов известно, что для достаточной прочности конструкции фактическое рабочее напряжение конструкции под нагрузкой должно быть ниже её предельного напряжения. В расчетах на прочность используется коэффициент больше 1 для деления предельного напряжения, и результат называется допустимым напряжением [σ].

где S — коэффициент безопасности, σ_s — предел текучести материала.
Из карты максимальных эквивалентных напряжений и карты максимальных эквивалентных деформаций видно, что их максимальные значения появились на большом конце зацепления конической шестерни. При частоте вращения 310 об/мин максимальное значение эквивалентной силы составило 584,57 МПа, а максимальное значение эквивалентной деформации — 3,1587 × 10^−3 мм. Поскольку материалом конической шестерни является 20CrMnTi, её предел текучести составляет 835 МПа, коэффициент безопасности — 1,2, а допустимое напряжение — 695,8 МПа. Из карты максимальных эквивалентных напряжений конической шестерни видно, что максимальное значение эквивалентной силы пары конических шестерен составляет 584,57 МПа, что меньше допустимого напряжения материала и соответствует требованиям прочности [41].
5. Полевые испытания
5.1. Условия эксперимента
Полевое испытание высокоскоростного ротационного культиватора было проведено 26 октября 2024 года в Сельскохозяйственной высокогорной зоне Желтого Треугольника, город Дунъин, провинция Шаньдун, и место полевого испытания показано на Рисунке 13. Оборудование для испытаний в основном состояло из трактора DEUTZ-FAHR CD1804, опытного образца высокоскоростного ротационного культиватора, обычного ротационного культиватора (1GKN-200), кольцевого ножа, рулетки (1–5 м), стальной линейки (1–300 мм), электронных весов, герметичного пакета, кожаной рулетки (1–50 м), квадратного ящика 0,5 м × 0,5 м, измерителя твердости почвы (ZHENJIANG TOP CLOUD-AGRI TECHNOLOGY CO., Чжэньцзян, Китай; TJSD-750-II) и измерителя влажности почвы (ZHENJIANG TOP CLOUD-AGRI TECHNOLOGY CO., TZS-1K-G).
Твердость почвы является отражением способности почвы сопротивляться внешнему уплотнению и разрушению, что напрямую влияет на сопротивление обработке. В этой статье твердость почвы экспериментального поля на глубине 0–300 мм измерялась пятиточечным методом с использованием датчика твердости почвы TOP CLOUD, как показано на Рисунке 15a. Измеренные значения поверхностной твердости показаны в Таблице 7. В то же время средняя влажность почвы составила 23,6%, определена с использованием экологического монитора TOP CLOUD с датчиком влажности почвы, как показано на Рисунке 15b. Измеренные данные показаны в Таблице 7. Образцы почвы были взяты из слоя почвы 0–300 мм с использованием пятиточечного метода отбора проб с помощью кольцевого ножа; измеренная плотность почвы составила 2,13 г·см⁻³. Значение pH почвы измерялось с использованием датчика pH почвы TOP CLOUD, и среднее значение измерений было получено в трех испытаниях. Измеренное значение pH почвы показано в Таблице 7. Остальные характеристики экспериментальных участков показаны в Таблице 7.

Рисунок 15. График измерения физических свойств почвы. (a) График измерения твердости почвы; (b) график измерения влажности почвы.
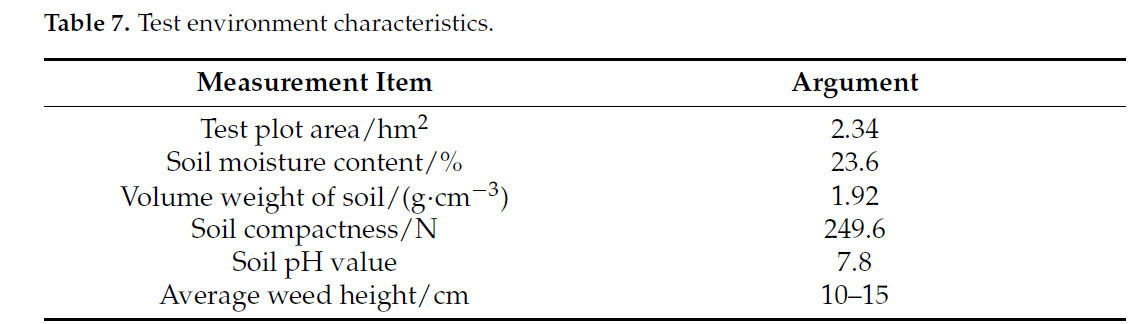
Таблица 7. Характеристики испытательной среды.
5.2. Методы испытаний
Для полевого испытания испытательное поле было разделено на три участка длиной 50 м и шириной в 1,5 раза больше ширины машины, причем первые 10 м каждого участка были зоной разгона машины, а средние 20 м — зоной стабилизированного движения машины. Согласно оптимизированному высокоскоростному ротационному культиватору, при шаге резания 6,9 см поступательная скорость орудия составляла 5,2 км/ч, а частота вращения заднего выходного вала трактора — 760 об/мин, поэтому частота вращения ножевого вала стабилизировалась на уровне 310 об/мин, а глубина обработки контролировалась на уровне 14 см; испытание повторялось трижды. Для метода испытания машины — согласно NY/T499-2013 [42], Operating Quality for Rotary Tillers (Министерство сельского хозяйства КНР: Пекин, Китай, 2013) и GB T5668-2017, Quality Standard for Rotary Tiller Operation (Стандартизационное управление Китая: Пекин, Китай, 2017), глубина обработки, стабильность обработки, степень крошения почвы, степень покрытия растительностью и выровненность поверхности использовались в качестве испытательных показателей.
5.2.1. Глубина обработки и стабильность глубины обработки
В зоне измерения после работы машины, вдоль направления движения машины, выбирались точки каждые 2 м как с правой, так и с левой стороны, при каждом проходе измерялось 20 точек. Стальная линейка вставлялась в почву для измерения глубины ротационной обработки в каждой точке измерения, всего за три прохода [40]. Глубина обработки рассчитывалась согласно уравнениям (23) и (24); стабильность глубины обработки в рабочих условиях рассчитывалась согласно уравнениям (25) и (26). При расчете левая и правая измерительные точки одного прохода считаются отдельными проходами.
где a_j — среднее значение глубины обработки для j-го прохода, см; a_ji — значение глубины обработки i-й измерительной точки в j-м проходе, см; n_j — количество измерительных точек в j-м проходе; a — среднее значение рабочей глубины обработки, см; N — количество проходов в одинаковых рабочих условиях.
где S_j — стандартное отклонение глубины обработки j-го прохода, см; S — стандартное отклонение рабочей глубины обработки, см; Z — коэффициент вариации глубины обработки в рабочих условиях, %; U — коэффициент стабильности глубины обработки в рабочих условиях, %.
5.2.2. Степень крошения почвы
Степень крошения почвы определялась с использованием пятиточечного метода отбора проб, при котором вся обработанная почва в пределах площади 0,5 м × 0,5 м измерялась в зоне измерения после работы машины, и процент массы комков почвы менее 4 см к общей массе комков почвы принимался за степень крошения; измерялась одна точка на каждом проходе, испытание повторялось трижды для получения среднего значения [41].

где G_b — масса комков почвы менее 4 см во всем обработанном слое, кг; G_t — общая масса комков почвы во всем обработанном слое, кг.
5.2.3. Коэффициент покрытия растительностью
Пять точек выбирались в зоне измерения для измерения массы соломы на поверхности почвы до и после обработки на площади 1 м × 1 м, и среднее значение из пяти точек рассчитывалось для получения коэффициента покрытия растительностью по формуле [43,44].

где F_b — коэффициент покрытия растительностью, %; W_h — среднее значение массы растительности на поверхности после обработки, г; W_q — среднее значение массы растительности на поверхности до обработки, г.
5.2.4. Метод испытания выровненности поверхности
Перпендикулярно направлению движения машины, над самой высокой точкой поверхности почвы выбиралась горизонтальная базовая линия, такой же ширины, как машина, и делилась на 10 равных частей. Это делалось для определения вертикального расстояния от каждой равной точки до поверхности почвы, расчета стандартного отклонения по формуле (26), измерения трех групп данных для каждого прохода и выражения ровности поверхности почвы после обработки как среднего значения стандартного отклонения [45].
5.3. Результаты испытаний и анализ
Согласно результатам оптимизации, после второго ортогонального ротатабельного комбинированного испытания для культиватора были выбраны оптимальные значения комбинации параметров: частота вращения ножевого барабана 310 об/мин, глубина обработки 13,2 см и поступательная скорость 4,8 км/ч; было проведено валидационное испытание. В дополнение к степени крошения почвы и выровненности поверхности, три показателя обработки, а именно глубина обработки, коэффициент стабильности глубины обработки и степень покрытия соломой, были исследованы для проверки общего влияния проанализированных оптимальных комбинаций параметров на стабильность обработки машины. Полевое испытание показано на Рисунке 16. Всего было проведено пять повторных испытаний, и после испытаний были взяты средние значения. Результаты опытного образца и обычного культиватора после полевых испытаний показаны в Таблице 8.

Рисунок 16. Полевые работы высокоскоростного ротационного культиватора.
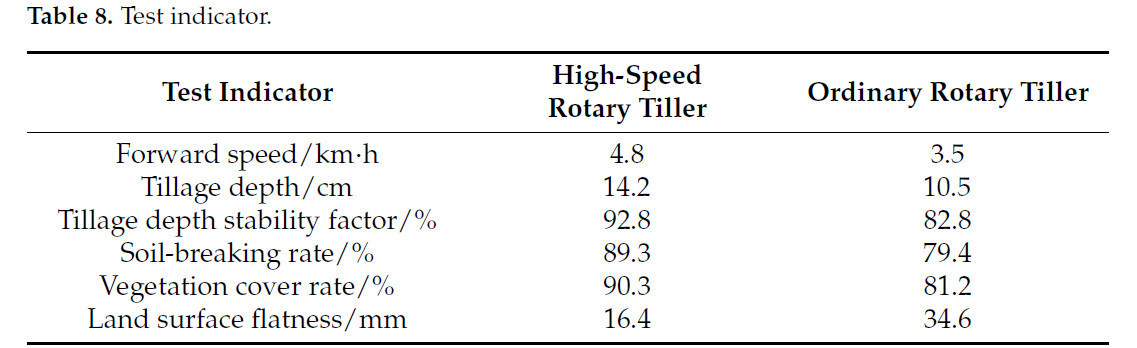
Таблица 8. Испытательные показатели.
Сравнение результатов полевых испытаний и имитационных испытаний высокоскоростного ротационного культиватора показывает, что имитационная степень крошения почвы примерно такая же, как результаты полевых испытаний, с разницей в 1,3%; имитационная выровненность поверхности немного больше, чем результаты полевых испытаний, с разницей в 2,2 мм. Учитывая, что плавающее действие волочильной плиты не могло быть реализовано во время моделирования, что привело к ошибке выравнивания поверхности, моделирование в основном отражает поверхностный эффект после работы орудий.
Результаты полевых испытаний показывают, что степень крошения почвы, глубина обработки и выровненность поверхности после работы высокоскоростного культиватора составляют 89,3%, 14,2 см и 16,4 мм, а стабильность глубины обработки и коэффициент покрытия растительностью достигли более 90%, то есть машина может выполнять крошение почвы, выравнивание поверхности и возврат стерни в почву в нескольких технологических операциях за один раз, соответствуя требованиям местной агрономии.
Результаты сравнительного испытания с обычным культиватором показали, что на уровне качества обработки работа высокоскоростного культиватора превосходила обычный культиватор по степени крошения почвы, выровненности поверхности, глубине обработки, коэффициенту стабильности глубины обработки и коэффициенту покрытия соломой. С точки зрения экономических выгод, рабочая скорость высокоскоростного культиватора в полевых испытаниях составляла 4,8 км/ч, в то время как рабочая скорость обычного культиватора — 3,5 км/ч. Рабочая скорость высокоскоростного культиватора по сравнению с обычным увеличилась на 1,3 км/ч и более; эффективность работы на единицу обрабатываемой площади увеличилась на 37,1%; а качество и эффективность работы были намного выше, чем у обычного культиватора. Замена более износостойких ножей может увеличить срок службы ножей более чем на 30% и снизить ежедневные затраты на техническое обслуживание [46,47].
Как видно из диаграммы сравнения эффективности работы на Рисунке 17, высокоскоростной ротационный культиватор может соответствовать агротехническим требованиям за одну операцию, чтобы почва достигла состояния, готового к посеву; обычному культиватору требуется две операции для достижения вышеуказанного эффекта.

Рисунок 17. Сравнение эффективности работы. (A) Эффект работы высокоскоростного ротационного культиватора. Поступательная скорость 4,8 км/ч, частота вращения ножевого барабана 310 об/мин. (B) Эффект работы обычного ротационного культиватора. Поступательная скорость 3,5 км/ч, частота вращения ножевого барабана 240 об/мин.
6. Выводы
Направленный на решение проблем твердой и затвердевшей почвы на засоленных землях района Биньхай, а также низкого качества и эффективности традиционных операций ротационной обработки, мы разработали высокоскоростной ротационный культиватор, который может соответствовать эксплуатационным требованиям засоленных земель с помощью теоретического анализа, ортогональных экспериментов, дискретно-элементного моделирования и других методов. Результаты подчеркивают следующее:
(1) Направленный на решение проблемы эффективности подготовки почвы на засоленных землях района Биньхай, разработан высокоскоростной ротационный культиватор для увеличения количества последовательных резов ножей ротационного культиватора в единицу времени путем определения количества ножей в одной плоскости и частоты вращения ножевого вала, чтобы сократить время резания почвы, улучшить качество ротационной обработки и эксплуатационную эффективность и соответствовать требованиям местных агротехнических приемов за одну операцию.
(2) Теоретический анализ был сосредоточен на траектории ножа, количестве ножей и расположении угла подъема спирали для определения основных факторов, влияющих на качество работы: частота вращения ножевого барабана, глубина обработки и поступательная скорость агрегата. В сочетании с центральным ортогональным испытанием и дискретно-элементным моделированием оптимальная комбинация параметров для высокоскоростного ротационного культиватора определена следующим образом: частота вращения ножевого барабана 310 об/мин, глубина обработки 13,2 см, поступательная скорость агрегата 4,8 км/ч. В это время имитационные значения степени крошения почвы и выровненности поверхности составили 90,6% и 18,2 мм соответственно.
(3) При оптимальной комбинации, установленной с помощью полевых сравнительных испытаний, результаты для высокоскоростного ротационного культиватора по сравнению с работой обычного ротационного культиватора по степени крошения почвы, глубине обработки, коэффициенту стабильности глубины обработки и коэффициенту покрытия растительностью составили 89,3%, 14,2 см, 92,8% и 90,3%. Выровненность поверхности составила 16,4 мм, что превосходит эффект работы обычного ротационного культиватора и соответствует агротехническим требованиям предпосевной подготовки под арахис на засоленных землях района Биньхай.
(4) Разработанный в этом исследовании высокоскоростной ротационный культиватор продемонстрировал замечательную производительность в полевых испытаниях на прибрежных засоленных почвах, соответствуя местным агротехническим требованиям. Однако его производительность на других типах почв (например, глинистых, песчаных и т.д.) и в различных условиях влажности требует проверки. Различия в физико-химических свойствах почв могут повлиять на результаты работы, а слишком влажные или слишком сухие почвы могут потребовать модификаций конструкции машины для адаптации к различным условиям влажности. Ножи высокоскоростного ротационного культиватора склонны к более быстрому износу при высоких скоростях вращения, что требует использования износостойких материалов или покрытий для увеличения срока службы ножей. В будущем будут проведены полевые испытания на различных типах почв и в условиях различной влажности для оптимизации материалов ножей, а также испытания на усталостную прочность ключевых компонентов для повышения их надежности при длительных высоких нагрузках. Кроме того, будет изучено согласование высокоэффективных силовых систем с тракторами для оптимизации энергопотребления, снижения требований к мощности трактора и повышения общей эксплуатационной эффективности.
Ссылки
1. Qin, K.; Ding, W.M.; Fang, Z.C.; Du, T.T.; Zhao, S.Q.; Wang, Z. Design and experiment of plowing and rotary tillage combined machine. Trans. Chin. Soc. Agric. Eng. 2016, 32, 7–16. [Google Scholar]
2. Zhu, Q.Z.; Wu, G.W.; Chen, L.P.; Meng, Z.J.; Shi, J.T.; Zhao, C.J. Design of Stratified and Depth-Fixed Application Device of Base-fertilizer for Winter Wheat Based on Soil-covering Rotary Tillage. Trans. Chin. Soc. Agric. Eng. 2018, 34, 18–26. [Google Scholar]
3. Gao, J.M.; Zhou, P.; Zhang, B.; Li, F.Y. Development and Test of High Speed Soil-cutting Simulation System Based on Smooth Particle Hydrodynamics. Trans. Chin. Soc. Agric. Eng. 2007, 8, 20–26. [Google Scholar]
4. Liu, G.Y.; Xia, J.F.; Zheng, K.; Cheng, J.; Wei, Y.S.; Guo, L.W.; Li, X.F.; Zhang, J.M. Design and Experiments of the Barrier Type Rotary Anti-adhesion Blade Roller with Vibration Crosspiece. Trans. Chin. Soc. Agric. Eng. 2022, 38, 29–40. [Google Scholar]
5. Fang, H.M.; Ji, C.Y.; Zhang, Q.Y.; Guo, J. Force Analysis of Rotary Blade Based on Distinct Element Method. Soc. Agric. Eng. 2016, 32, 54–59. [Google Scholar]
6. Zhao, Z.; Wang, D.W.; Shang, S.Q.; Guo, P.; Gao, Z.H.; Xia, C.; Yan, H.P.; Hou, J.L. Design and Test of a Dual-axis Layered Rotary Tillage Stubble Exterminator in Saline-alkali Land based on Discrete Elements. Int. J. Agric. Biol. Eng. 2024, 17, 163–175. [Google Scholar] [CrossRef]
7. Li, W.; Yang, J.; Tang, C.; Liu, X.; Xie, W.; Yao, R.; Wang, X. The Temporal–Spatial Dynamic Distributions of Soil Water and Salt under Deep Vertical Rotary Tillage on Coastal Saline Soil. Water 2022, 14, 3370. [Google Scholar] [CrossRef]
8. Upadhyay, G.; Raheman, H. Effect of Velocity Ratio on Performance Characteristics of an Active-passive Combination Tillage Implement. Biosyst. Eng. 2020, 191, 1–12. [Google Scholar] [CrossRef]
9. Salokhe, V.M.; Ramalingam, N. Effects of Direction of Rotation of a Rotary Tiller on Properties of Bangkok Clay Soil. Soil Tillage Res. 2001, 63, 65–74. [Google Scholar] [CrossRef]
10. Asl, J.H.; Singh, S. Optimization and Evaluation of Rotary Tiller Blades: Computer Solution of Mathematical Relations. Soil Tillage Res. 2009, 106, 1–7. [Google Scholar] [CrossRef]
11. Tian, Y.; Jin, L.; Zhao, Y.X. Experimental Research on the Paraments Impacted Homework PerFormance of Rotary Cultivator. J. Chin. Agric. Mech. 2016, 37, 1–4. [Google Scholar]
12. Zheng, K.; McHugh, A.D.; Li, H.W.; Wang, Q.J.; Liu, C.Y.; Hu, H.N.; Liu, W.Z.; Zhang, Z.Q.; Liu, P.; He, J. Design and Experiment of Anti-vibrating and Anti-wrapping Rotary Components for Subsoiler Cum Rotary Tiller. Int. J. Agric. Biol. Eng. 2019, 12, 47–55. [Google Scholar] [CrossRef]
13. Yang, Q.L.; Chen, G.B.; Xie, L.J.; Wang, Q.J.; He, J.; Li, H.W. Design and Experiment of Telescopic Finger Stalk of Maize Straw Burying Machine. Trans. Chin. Soc. Agric. Mach. 2020, 51, 35–45. [Google Scholar]
14. Zhang, C.L.; Xia, J.F.; Zheng, J.M.; Zhou, H.; Zhu, Y.H.; Wang, J.W. Design and Experiment of Knife Roller for Six-head Spiral Straw Returning Cultivator. Trans. Chin. Soc. Agric. Mach. 2019, 50, 25–34. [Google Scholar]
15. Zheng, K.; Li, Y.F.; Xia, J.F.; Liu, G.Y.; Cheng, J.; Kang, Q.X. Design and Experiment of Land Leveling Blade Roller of Ditching and Rotary Tiller with Gradual Spiral Angle. Trans. Chin. Soc. Agric. Mach. 2021, 52, 63–73. [Google Scholar]
16. Matin, M.A.; Desbiolles, J.M.A.; Fielke, J.M. Strip-tillage using Rotating Straight Blades: Effect of Cutting Edge Geometry on Furrow Parameters. Soil Tillage Res. 2016, 155, 271–279. [Google Scholar] [CrossRef]
17. Shi, J.Y.; He, R.Y.; Tao, S.K.; Xu, G.M.; Fan, C.; Ding, Q.S. Design and Operation Parameter Optimization of Plowing-Rotary-Leveling Compound Tiller; Nanjing Agricultural University: Nanjing, China, 2024. [Google Scholar]
18. Qin, K.; Ding, W.M.; Fang, Z.C.; Du, T.T.; Zhao, S.Q.; Wang, Z. Analysis and Experiment of Tillage Depth and Width Stability for Plowing and Rotary Tillage Combined Machine. Trans. Chin. Soc. Agric. Eng. 2016, 32, 1–8. [Google Scholar]
19. Li, B.F. Agricultural Mechanics; China Agricultural Press: Beijing, China, 2017. [Google Scholar]
20. Yang, Y.W.; Tong, J.; Ma, Y.H.; Jiang, X.H.; Li, J.G. Design and Experiment of Biomimetic Rotary Tillage Blade Based on Multiple Claws Characteristics of Mole Rats. Trans. Chin. Soc. Agric. Eng. 2019, 35, 37–45. [Google Scholar]
21. Yang, Y.; Hu, Z.; Gu, F.; Ding, Q. Simulation and Experimental Study of the Tillage Mechanism for the Optimal Design of Wheat Rotary Strip–Tiller Blades. Agriculture 2023, 13, 632. [Google Scholar] [CrossRef]
22. Zhang, X.; Zhang, L.; Hu, X.; Wang, H.; Shi, X.; Ma, X. Simulation of Soil Cutting and Power Consumption Optimization of a Typical Rotary Tillage Soil Blade. Appl. Sci. 2022, 12, 8177. [Google Scholar] [CrossRef]
23. GB T5669-2017; Rotary Tiller—Rotary Blades and Blade Holders. National Technical Committee for Standardization of Agricultural Machinery: Beijing, China, 2017.
24. GB T5668-2017; Rotary Tiller. Standardization Administration of China: Beijing, China, 2017.
25. Zhai, S.; Shi, Y.; Zhou, J.; Liu, J.; Huang, D.; Zou, A.; Jiang, P. Simulation Optimization and Experimental Study of the Working Performance of a Vertical Rotary Tiller Based on the Discrete Element Method. Actuators 2022, 11, 342. [Google Scholar] [CrossRef]
26. Zhao, J.G.; Wang, A.; Ma, Y.J.; Li, J.C.; Hao, J.J.; Nie, Q.L.; Long, S.F.; Yang, Q.F. Design and Test of Soil Preparation Machine Combined Subsoiling, Rotary Tillage and Soil Breaking. Trans. Chin. Soc. Agric. Eng. 2019, 35, 46–54. [Google Scholar]
27. Xiao, M.H.; Niu, Y.; Wang, K.X.; Zhou, J.B.; Ma, R.Q. Design of Self-excited Vibrating Rotary Tiller and Analysis of Its Performance in Reducing Torsion and Consumption. Trans. Chin. Soc. Agric. Mach. 2022, 53, 52–63. [Google Scholar]
28. Guo, L.; Fang, Q.M.; Li, M.F.; Wang, Z.; Wang, C.; Zhang, L.Y. Parameter Calibration for Discrete Element Simulation of Red Clay Soils in Sloping Cropland in Central Yunnan. Trans. Chin. Soc. Agric. Mach. 2024, 55, 185–193+285. [Google Scholar]
29. Adajar, J.B.; Alfaro, M.; Chen, Y.; Zeng, Z.W. Calibration of discrete element parameters of crop residues and their interfaces with soil. Comput. Electron. Agric. 2021, 188, 106349. [Google Scholar] [CrossRef]
30. Mak, J.; Chen, Y.; Sadek, M.A. Determining Parameters of a Discrete Element Model for Soil–tool Interaction. Soil Tillage Res. 2012, 118, 117–122. [Google Scholar] [CrossRef]
31. Wu, Z.Y.; Wang, X.S.; Liu, D.W.; Xie, F.P.; Ashwehmbom, L.G.; Zhang, Z.Z.; Tang, Q.J. Calibration of Discrete Element Parameters and Experimental Verification for Modelling Subsurface Soils. Biosyst. Eng. 2021, 212, 215–227. [Google Scholar] [CrossRef]
32. Sun, J.B.; Liu, Q.; Yang, F.Z.; Liu, Z.J.; Wang, Z. Calibration of Discrete Element Simulation Parameters of Sloping Soil on Loess Plateau and Its Interaction with Rotary Tillage Components. Trans. Chin. Soc. Agric. Mach. 2022, 53, 63–73. [Google Scholar]
33. Wang, D.W.; Lu, T.; Zhao, Z.; Shang, S.Q.; Zheng, S.; Liu, J. Calibration of Discrete Element Simulation Parameters for Cultivated Soil Layer in Coastal Saline alkali Soil. Trans. Chin. Soc. Agric. Mach. 2024, 55, 240–249. [Google Scholar]
34. Liu, M.; Wang, J.; Feng, W.; Jing, H.; Wang, Y.; Guo, Y.; Xu, T. Calibration of Model Parameters for Soda Saline Soil-Subsoiling Component Interaction Based on DEM. Appl. Sci. 2023, 13, 11596. [Google Scholar] [CrossRef]
35. Li, M.L.; Wang, L.Z.; Liao, Q.X.; Liao, Y.T.; Xiao, W.L.; Zhang, Q.S. Calibration of Rototilled Soil Discrete Element Parameters after Rotary Tillage in the Preparation Process of Rapeseed Mechanized Direct Seeding Micro-ridge Seed Bed. Trans. Chin. Soc. Agric. Eng. 2023, 39, 10–19. [Google Scholar]
36. Xiang, W.; Wu, M.L.; Lü, J.N.; Quan, W.; Ma, L.; Liu, J.J. Calibration of Simulation Physical Parameters of Clay Loam Based on Soil Accumulation Test. Trans. Chin. Soc. Agric. Eng. 2019, 35, 116–123. [Google Scholar]
37. Li, J.W.; Tong, J.; Hu, B.; Wang, H.B.; Mao, C.Y.; Ma, Y.H. Calibration of Parameters of Interaction between Clayey Black Soil with Different Moisture Content and Soil-engaging Component in Northeast China. Trans. Chin. Soc. Agric. Eng. 2019, 35, 130–140. [Google Scholar]
38. Siddique, M.A.A.; Baek, S.-Y.; Baek, S.-M.; Jeon, H.-H.; Lee, J.-H.; Son, M.-A.; Yoon, S.-Y.; Kim, Y.-J.; Lim, R.-G. The Selection of an Energy-Saving Engine Mode Based on the Power Delivery and Fuel Consumption of a 95 kW Tractor during Rotary Tillage. Agriculture 2023, 13, 1376. [Google Scholar] [CrossRef]
39. Tian, Y.; Jin, L.; Liu, X.W.; Zhao, Y.X. Model Analysis of the Assembly of Spindle and Straight Tooth Bevel Gear Based on Ansys Workbench. J. Chin. Agric. Mech. 2015, 36, 6–8. [Google Scholar]
40. Sun, Y.T.; Tian, G.F.; Fu, Y.B. Research on Contact Performance of Spiral Bevel Gear Based on Finite Element Method. J. Mach. Des. 2023, 40, 62–67. [Google Scholar]
41. Wang, J.Z. Transient Dynamics Analysis of Straight Bevel Gear Mechanisms. J. South. Agric. Mach. 2023, 54, 133–135+156. [Google Scholar]
42. NY/T499-2013; Operating Quality for Rotary Tillers. Ministry of Agriculture of the People’s Republic of China: Beijing, China, 2013.
43. Guan, C.S.; Cui, Z.C.; Gao, Q.S.; Wang, S.L.; Chen, Y.S.; Yang, Y.T. Design of Biaxial Rotary Tillage Soil Test Bench and Layered Tillage Test. Trans. Chin. Soc. Agric. Eng. 2021, 3, 28–37. [Google Scholar]
44. Wang, J.F.; Yang, D.Z.; Fu, Z.D.; Wang, J.W.; Weng, W.X. Design and Experiment of Rice Straw Biaxial Deep-buried Returning Machine. Trans. Chin. Soc. Agric. Mach. 2023, 54, 21–30. [Google Scholar]
45. Chinese Academy of Agricultural Mechanization Sciences. Agricultural Machinery Design Manual (Part 1); China Agricul-tural Machinery Press: Beijing, China, 2007. [Google Scholar]
46. Zheng, H.H.; Du, N.; Wei, C.B.; Zhang, C.; Xu, Y. Mechanical Tillage Efficiency of Land Consolidation Based on Plot Area and Shape Trans. Chin. Soc. Agric. Mach. 2024, 55, 232–240+259. [Google Scholar]
47. Hao, J.J.; Zhan, Z.G.; Hou, J.Y.; Zhao, J.G.; Liu, J.C.; Yin, C.F. Preparation and Microstructure Properties of Fe/WC/CeO2 Plasma Surfacing Layer for Rotary Blades. Chin. Soc. Agric. Eng. 2021, 37, 1–8. [Google Scholar]

Zheng S, Lu T, Liu J, Tian Y, Han M, Tai M, Gao S, Liu T, Wang D, Zhao Z. Discrete Element-Based Design of a High-Speed Rotary Tiller for Saline-Alkali Land and Verification of Optimal Tillage Parameters. Agriculture. 2025; 15(3):269. https://doi.org/10.3390/agriculture15030269
Перевод статьи «Discrete Element-Based Design of a High-Speed Rotary Tiller for Saline-Alkali Land and Verification of Optimal Tillage Parameters» авторов Zheng S, Lu T, Liu J, Tian Y, Han M, Tai M, Gao S, Liu T, Wang D, Zhao Z., оригинал доступен по ссылке. Лицензия: CC BY. Изменения: переведено на русский язык

















































































































Комментарии (0)