Как заставить сеялку сеять ровно на неровном поле: умная система контроля глубины
Для решения проблемы снижения точности определения глубины посева, вызванной изменчивостью почвенного рельефа при работе пшеничных рядовых сеялок, было разработано лабораторное стендовое испытательное устройство, подходящее для таких сеялок. Устройство объединяет лазерный датчик и матричный датчик для определения рельефа и глубины посева.
Аннотация
Лазерный датчик предоставляет измеренные значения глубины посева, в то время как матричный датчик фиксирует различные особенности рельефа. Фактические значения глубины посева получаются с помощью лабораторной экспериментальной установки. Эксперимент включает три типа рельефа: выпуклый, вогнутый и ровный. Матрица уклонов рельефа получается с использованием матричного датчика, после чего извлекаются количественные характеристики рельефа. Затем с помощью лазерного датчика определяется измеренная глубина посева, а фактическая глубина посева измеряется вручную. Проводится PCA-анализ для установления связи между характеристиками рельефа и отклонениями глубины посева. Результаты показывают, что в различных условиях рельефа средний уклон и стандартное отклонение уклона являются основными компонентами, влияющими на отклонения глубины посева. По сравнению с использованием одного датчика, данная система обеспечивает более точное измерение глубины посева за счёт анализа характеристик рельефа. Устройство предоставляет ценные данные для контроля глубины посева в изменяющихся условиях рельефа при последующих операциях.
1. Введение
Глубина посева является критическим техническим параметром при посадке сельскохозяйственных культур. Такие факторы, как тип почвы, влажность почвы и конструкция сеялки, значительно влияют на глубину посева [1,2]. Для многорядных пшеничных сеялок наличие большого количества растительных остатков на поверхности почвы или различные неровности поверхности часто приводят к плохой выровненности поля во время работы, что напрямую влияет на фактическую глубину посева. Таким образом, стабильность глубины посева является жизненно важным показателем эффективности сеялки и может напрямую отражать качество работы почвозащитной сеялки [3,4].
Стабильность глубины посева определяется как поддержание одинаковой глубины на протяжении всего процесса посева. Стабильная и соответствующая требованиям глубина посева и уплотнение обеспечивают оптимальный контакт семян с почвой, способствуя поглощению воды и быстрому и равномерному прорастанию семян [5]. Следовательно, достижение стабильной и одинаковой глубины посева остается ключевой задачей. Обнаружение глубины посева, являющееся ключевым компонентом технологий точного земледелия, напрямую влияет на рост, урожайность и качество сельскохозяйственных культур. С быстрым развитием измерительных и управляющих технологий контроль глубины посева смещается в сторону более высокой точности и качества [6]. Традиционно глубина посева измерялась вручную — процесс, требующий много времени и труда, без возможности мониторинга в реальном времени или непрерывного контроля. С ростом потребности в механизации и автоматизации сельского хозяйства ручное измерение глубины посева становится устаревшим, что подчеркивает необходимость в более эффективных и точных автоматизированных технологиях обнаружения [7].
Существующие методы определения глубины посева можно разделить на контактные и бесконтактные методы [8]. Контактные методы измеряют глубину посева с помощью механических или копирующих механизмов. Хотя эти методы просты и легки в реализации, на них значительно влияют такие факторы, как неровности поверхности почвы, уплотнение и размер частиц, что приводит к более низкой точности и стабильности измерений [9,10]. Более того, контактные методы не могут обеспечить непрерывное измерение, что ограничивает их применение в современном сельском хозяйстве.
Бесконтактные методы используют передовые сенсорные технологии, включая лазерные датчики, ультразвуковые датчики и FLEX-датчики, для эффективного, быстрого и точного определения глубины посева в реальном времени [11,12]. Например, Mapoka и др. предложили неразрушающую технологию зондирования на основе георадара для обнаружения семян кукурузы в закрытых бороздах и измерения глубины посадки, изучая ее потенциал в качестве дополнения к традиционным методам [13]. Nielsen и др. разработали инновационную систему измерения глубины посева, интегрирующую линейные датчики перемещения и ультразвуковые датчики для измерения расстояния от сошника до рамы и расстояния от рамы до земли. Путем слияния сигналов обоих датчиков система точно рассчитывает фактическую рабочую глубину сошника. Аналогично, Lee и др. разработали систему определения глубины обработки почвы, в которой используются оптические датчики для измерения расстояния до земли, датчики наклона для контроля угла продольного наклона трактора и датчики подъема рычага для определения положения рычага подъема. Интегрируя данные этих трех датчиков и применяя математическую модель, система точно измеряет глубину обработки почвы [14]. Эти технологии избегают механического контакта и измеряют расстояние между сеялкой и землей, не нарушая поверхность почвы, что позволяет рассчитывать глубину посева. Среди бесконтактных методов лазерные и ультразвуковые датчики занимают важное место благодаря своей высокой точности и быстром отклику, что делает их критически важными компонентами систем определения глубины посева [15]. Лазерные датчики, в частности, используют импульсное излучение и прием лазера для точного измерения относительного расстояния между поверхностью почвы и сеялкой даже в условиях неровной и волнистой почвы [16].
Однако, хотя лазерные датчики обеспечивают высокую точность, они подвержены влиянию факторов окружающей среды, таких как отражательная способность поверхности почвы, изменения влажности и условия освещения. Более того, системы с одним датчиком часто испытывают трудности при работе со сложным рельефом или почвенными условиями, что приводит к накоплению ошибок и нестабильности измерений [17]. В результате системы слияния данных множества датчиков для определения глубины посева стали центром внимания исследователей. Комбинируя лазерные датчики с матричными датчиками, система использует точность лазерных датчиков и возможности извлечения характеристик рельефа матричных датчиков, что обеспечивает более точный мониторинг глубины посева в реальном времени [18].
Матричные датчики, захватывая данные изображения поверхности с высоким разрешением, эффективно извлекают неровности поверхности почвы и изменения характеристик, обеспечивая высокую адаптируемость к сложному рельефу. Эта технология дополняет лазерные датчики, предоставляя дополнительные данные о рельефе, которые помогают корректировать ошибки лазерных измерений [19]. Следовательно, слияние данных лазерного и матричного датчиков значительно повышает точность и стабильность измерений системы, обеспечивая точный и непрерывный мониторинг глубины посева в сложных условиях окружающей среды [20].
Целью данного исследования является разработка и создание системы определения глубины посева, основанной на слиянии лазерного и матричного датчиков. Путем интеграции данных множества датчиков система обеспечивает точное измерение глубины посева в различных почвенных условиях, при различных изменениях рельефа и воздействиях факторов окружающей среды. Лабораторные стендовые испытания подтверждают адаптируемость и стабильность системы в различных условиях рельефа, в то время как устанавливается модель коррекции ошибок для поддержки разработки и применения точных многорядных пшеничных сеялок.
2. Материалы и методы
2.1. Материалы и испытательное оборудование
2.1.1. Характеристики поверхности почвы при рядовом посеве пшеницы
Точность глубины посева имеет решающее значение для обеспечения качества посева, а характеристики поверхности почвы напрямую влияют на точность систем определения глубины посева. Характеристики поверхности почвы включают множество факторов: физическое состояние почвы, неровности рельефа, твердость поверхности и уровень влажности [21]. Традиционно системы определения глубины посева полагаются на зондирование состояния поверхности почвы, используя датчики для измерения расстояния между сеялкой и землей в реальном времени для оценки глубины посева [22]. Однако на эти измерения часто влияют изменения характеристик поверхности почвы, в частности в условиях неровной и волнистой почвы, что может привести к накоплению ошибок измерения. Поэтому изучение влияния различных условий рельефа на глубину посева и моделирование различных почвенных и рельефных условий с помощью экспериментов являются ключом к повышению точности обнаружения.
Такие факторы, как состояние поверхности почвы, влажность и гранулометрический состав, значительно влияют на производительность сеялок, в частности на контроль глубины посева. Плотность и твердость почвы напрямую влияют на способность сеялки заглубляться, определяя стабильность глубины посева [23]. В практических приложениях физические свойства почвы необходимо точно измерять, чтобы интегрировать их с системой определения глубины посева для корректировки глубины в реальном времени [24]. Однако помимо свойств почвы, неровности рельефа и изменения уклона также являются критическими факторами, влияющими на глубину посева. В различных условиях рельефа уклоны и неровная поверхность могут снижать стабильность сеялки. На крутых склонах или неровной почве сеялка может наклоняться, ухудшая точность измерений датчиков и увеличивая ошибки определения глубины посева. Следовательно, получение точных данных о рельефе и выполнение корректировок в реальном времени необходимы для уменьшения этих эффектов.
Для систематического изучения влияния различных типов рельефа на глубину посева в данном исследовании моделируются три типичные модели почвенного рельефа: вогнутый, выпуклый и ровный (Рисунок 1). Каждая модель рельефа выбрана на основе механизма ее влияния на глубину посева, ставит целью выявить конкретное влияние различных характеристик поверхности почвы и неровностей рельефа на определение глубины посева с помощью экспериментальных данных [25].

Рисунок 1. Моделирование трех различных типов рельефа: (a) Вогнутый рельеф. (b) Выпуклый рельеф. (c) Ровный рельеф.
Условия рельефа в экспериментальном лотке были спроектированы для моделирования типичных сценариев, возникающих при посеве пшеницы. Выпуклый рельеф может представлять почвенные гребни, образованные механическим уплотнением, например, оставленные колесами трактора или другой тяжелой техники. Вогнутый рельеф имитировал природные впадины, эрозионные канавы или пути стока воды, в то время как ровный рельеф представлял идеальные условия посева с равномерно выровненной поверхностью почвы. Эти модели рельефа были выбраны для оценки адаптируемости и точности системы определения глубины посева.
2.1.2. Методы и системы для определения глубины посева пшеницы
(1) Принцип определения глубины посева
Глубина посева пшеничной рядовой сеялки регулируется изменением высоты опорно-прикатывающего колеса. Однако при работе по технологии No-till такие факторы, как растительные остатки и сорняки на поверхности, неровные уклоны почвы и изменения уплотнения почвы, могут влиять на высоту опорно-прикатывающего колеса, приводя к расхождениям между фактической и заданной глубиной посева. В результате традиционный метод контроля глубины может страдать от недостаточной точности.
Чтобы решить эту проблему, данное исследование интегрирует лазерный датчик в конструкцию сеялки. Отслеживая изменения расстояния между лазерным датчиком и поверхностью почвы, можно косвенно измерять изменения глубины посева. Этот подход эффективно устраняет помехи от внешних факторов, таких как растительные остатки и сорняки, предоставляя более точный метод определения глубины посева.
(2) Принцип работы лазерного датчика и метод измерения
Лазерный датчик устанавливается на раме сеялки и интегрируется с сошником. Когда сошник заглубляется в почву, лазерный датчик соответственно опускается, отражая изменения глубины посева. Опорно-прикатывающее колесо, которое поддерживает тесный контакт с землей, обеспечивает, чтобы изменения расстояния между лазерным датчиком и поверхностью почвы точно отражали фактическую глубину посева. Данные в реальном времени, получаемые лазерным датчиком, обеспечивают точный расчет глубины [26].
Принцип измерения проиллюстрирован на Рисунке 2. Пусть начальное расстояние между лазерным датчиком и поверхностью почвы равно L, а фактическое расстояние во время посева равно L′. Глубина посева d может быть рассчитана по формуле: d = L - L′.
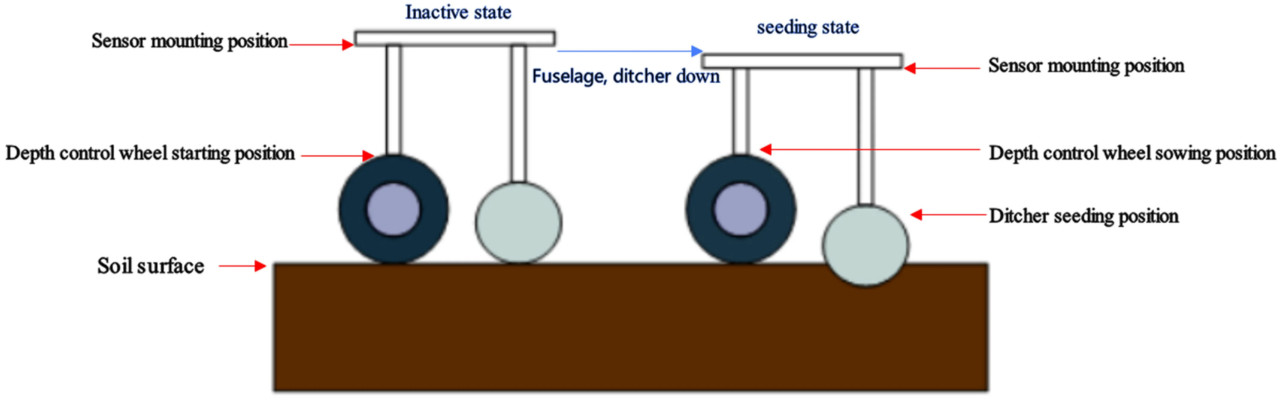
Рисунок 2. Схематическая диаграмма определения глубины.
Путем непрерывного вычисления разницы между L и L′ система может определять глубину посева с высокой точностью. Этот бесконтактный метод обнаружения эффективно решает проблемы, связанные с различными почвенными условиями, изменениями уклона и внешними помехами, обеспечивая точное измерение глубины посева. Более того, он сохраняет эффективную работоспособность даже в сложных условиях рельефа [27].
2.1.3. 3D-проектирование конструкции многорядной пшеничной рядовой сеялки
Пшеничная рядовая сеялка — это сельскохозяйственная машина, предназначенная для точного посева, в основном используемая для пшеницы. Ее общая конструкция состоит из нескольких основных компонентов, включая раму, сошник, семенной ящик и высевающий аппарат.
Возможности 3D-моделирования SolidWorks обеспечивают четкую визуализацию формы рамы и взаимосвязей между различными компонентами [28,29]. В этом исследовании программное обеспечение SolidWorks использовалось для моделирования и демонстрации всех деталей и общей конструкции многорядной пшеничной рядовой сеялки. Учитывая сложность конструктивного проекта сеялки, точная интеграция каждого компонента имеет решающее значение для повышения как эффективности посева, так и точности глубины.
Схемы ключевых компонентов и полная сборочная иллюстрация показаны на Рисунке 3. Эти визуализации не только подчеркивают функциональный проект сеялки, но и служат основой для дальнейшей оптимизации структурных регулировок и улучшения производительности.
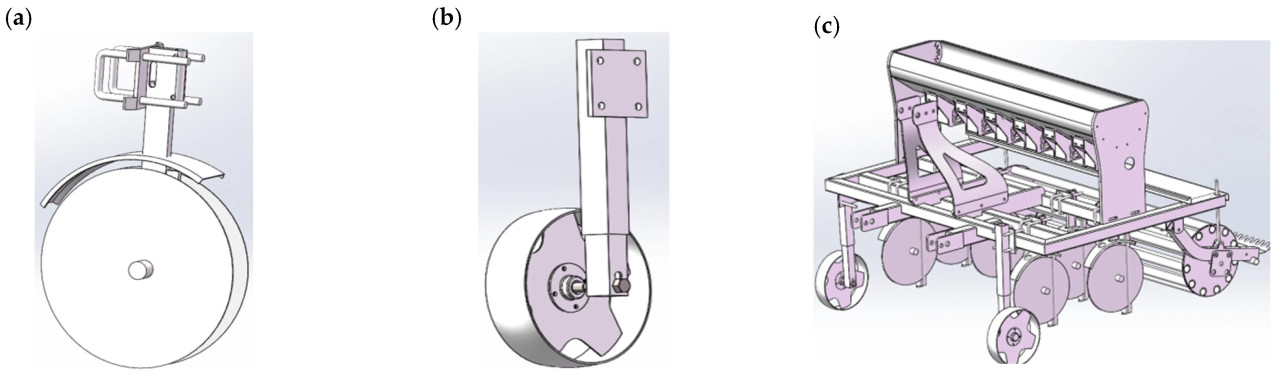
Рисунок 3. Общий сборочный чертеж многорядной пшеничной сеялки: (a) Чертеж конструкции сошника. (b) Схема конструкции колеса, ограничивающего глубину. (c) Общий сборочный чертеж.
2.1.4. Проектирование конструкции и анализ многорядной пшеничной рядовой сеялки
(1) На основе 3D-модели окончательная физическая конструкция многорядной пшеничной рядовой сеялки показана на рисунке. На Рисунке 4a рама служит основой всей сеялки, поддерживая все ключевые компоненты. Конструкция рамы должна обеспечивать превосходную жесткость и прочность для адаптации к работе на сложных рельефах. На Рисунке 4b основная функция сошника — создание семенных борозд в почве. Его структурные типы включают конические, дисковые и лаповидные, среди которых дисковый сошник подходит для работы в условиях покрытия растительными остатками благодаря своим превосходным режущим свойствам. Требования к проекту сошника включают высокую точность регулировки глубины, высокую износостойкость и адаптируемость к различным почвенным условиям и изменениям рельефа.
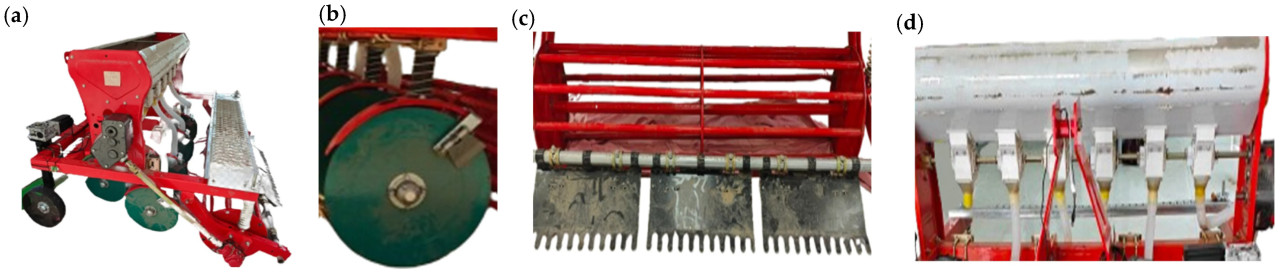
Рисунок 4. Физическое изображение многорядной пшеничной сеялки: (a) Рама, опорно-прикатывающее колесо. (b) Сошник. (c) Прикатывающее и заделывающее почву устройство. (d) Семенной ящик и высевающее устройство.
Основная функция опорно-прикатывающего колеса — регулировка глубины борозды и обеспечение стабильной глубины посева. Проект позволяет выбирать между опорными колесами или прикатывающими колесами, которые достигают контроля глубины благодаря тесному контакту с землей. В данной конструкции точная регулировка опорно-прикатывающего колеса достигается путем интеграции шагового двигателя и редуктора [30]. Семенной ящик используется для хранения семян для посева, его емкость спроектирована для удовлетворения требований непрерывной работы [31]. Высевающий аппарат равномерно и дозированно подает семена в борозды. Это устройство использует гравитационную систему высева, которая проста по конструкции и подходит для обычных потребностей посева.
На Рисунке 4c основная функция прикатывающего устройства — уплотнение и заделка борозд, обеспечение адекватного контакта семян с почвой и повышение всхожести. Обычные прикатывающие устройства включают прикатывающие колеса или катки, при их проектировании внимание уделяется форме и распределению давления для обеспечения эффективного уплотнения.
Параметры конфигурации этой многорядной пшеничной сеялки показаны в Таблице 1 ниже:
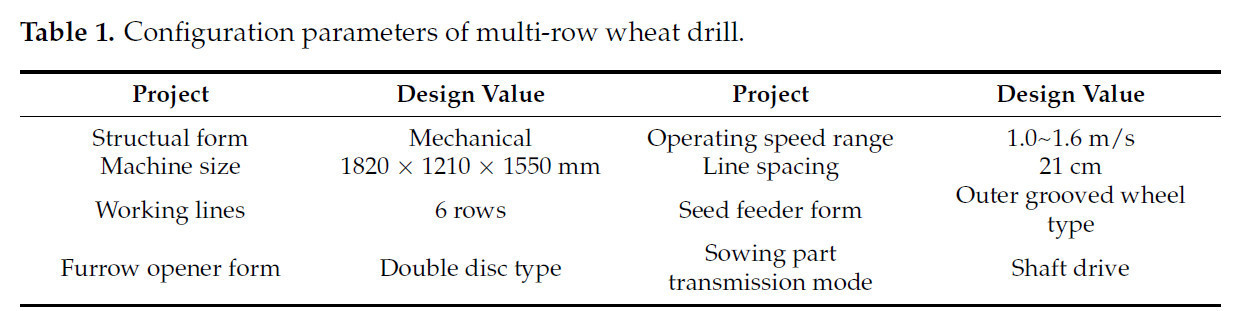
Таблица 1. Параметры конфигурации многорядной пшеничной сеялки.
(2) Проектирование и анализ конструкции автоматической регулировки глубины посева
При проектировании конструкции автоматической регулировки глубины посева для пшеничной рядовой сеялки в основном используется комбинация шагового двигателя, редуктора и опорно-прикатывающего колеса [32]. Структура управления, интегрирующая опорно-прикатывающее колесо и шаговый двигатель, обеспечивает стабильность рабочей глубины сошника. В частности, шаговый двигатель и редуктор работают вместе, регулируя положение опорно-прикатывающего колеса, достигая контроля глубины с точностью до миллиметра [33]. Используя лазерный датчик для мониторинга расстояния между опорно-прикатывающим колесом и поверхностью почвы в реальном времени, система может автоматически регулировать положение колеса для обеспечения точной глубины посева.
Эта комбинированная структура использует шаговый двигатель для выполнения точных шаговых движений с помощью управления импульсными сигналами, в то время как редуктор увеличивает крутящий момент для поддержания стабильной и надежной работы во время регулировок. Модель редуктора — NMRV40-86BJ, а шаговый двигатель — 86BYG250H (двухфазный гибридный шаговый двигатель). Таблицы параметров обоих компонентов показаны ниже в Таблице 2 и Таблице 3. Шаговый двигатель управляется драйвером шагового двигателя DMA860H, который преобразует импульсные сигналы от контроллера в силовые сигналы для двигателя, обеспечивая, чтобы скорость двигателя была пропорциональна частоте импульсов, что позволяет точно регулировать скорость и позиционирование [34].

Таблица 2. Параметры шагового двигателя 86BYG250H.
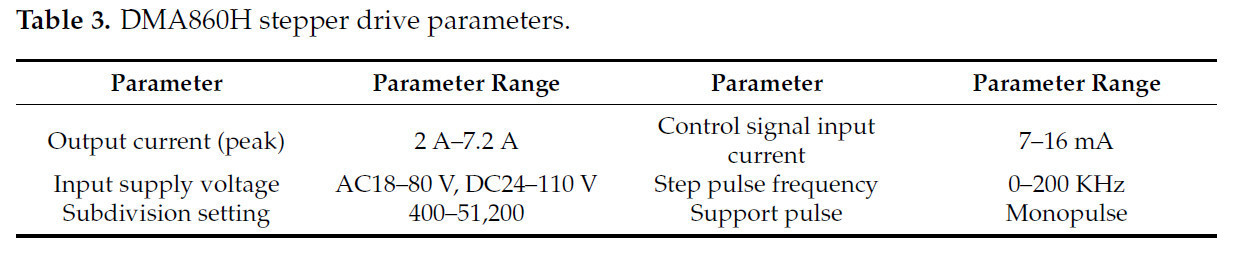
Таблица 3. Параметры драйвера шагового двигателя DMA860H.
Система работает от источника питания переменного тока 220 В и оснащена импульсным источником питания для распределения электроэнергии. Реальное изображение импульсного источника питания показано на Рисунке 5.
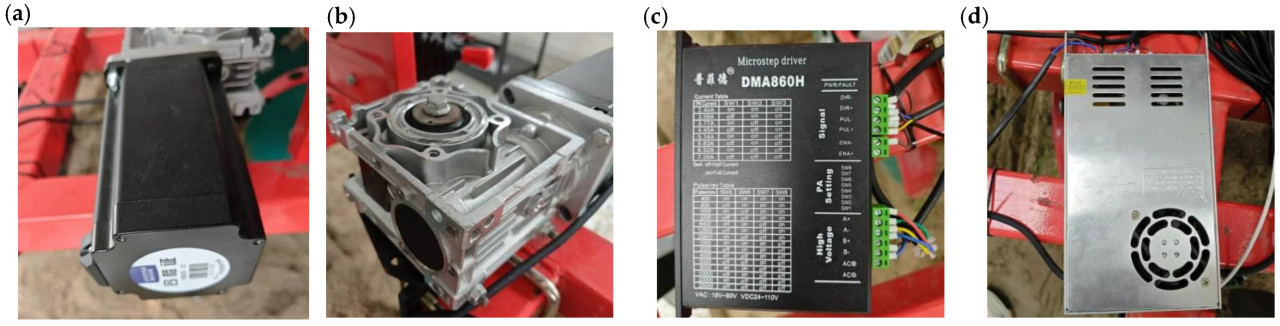
Рисунок 5. Саморегулирующаяся структура: (a) Шаговый двигатель. (b) Редуктор. (c) Драйвер шагового двигателя. (d) Импульсный источник питания.
2.2. Метод испытаний
2.2.1. Проектирование мобильной платформы для определения глубины посева
Экспериментальная платформа данного исследования создана на основе сеялки и включает различные компоненты, такие как шаговый двигатель, почвенный лоток, датчики и винтовые направляющие, для создания мобильной платформы определения глубины посева в различных условиях рельефа, как показано на Рисунке 6. Платформа в основном состоит из следующих частей:
(1) Многорядная пшеничная полосовая сеялка: Основная структура платформы включает раму, сошник и колесо, ограничивающее глубину. Сошник используется для создания посевных борозд, в то время как колесо, ограничивающее глубину, используется для контроля глубины посева, обеспечивая точную и стабильную глубину посева во время процесса.
(2) Почвенный лоток: Почвенный лоток имеет сварную конструкцию, длину 3000 мм, ширину 2000 мм и высоту 100 мм. Он имеет объем 0,6 кубических метра почвы и используется для моделирования различных условий рельефа. Почвенный лоток может имитировать три формы рельефа: ровный, выпуклый и вогнутый, помогая моделировать сложные изменения рельефа в реальном процессе посева.
(3) Приводное устройство: Платформа использует высококлассный шариковый винтовой модуль скольжения KGX2000 с двумя линейными направляющими и четырьмя ползунами в качестве приводного устройства для сеялки. После фиксации направляющая может развивать горизонтальное тяговое усилие до 200 кг. Направляющая использует высокоточный шариковый винт и высокоточные ползуны на линейных направляющих, обеспечивая плавную и износостойкую работу, обеспечивая эффективную долгосрочную эксплуатацию.
(4) Соединительная конструкция: Для обеспечения стабильного соединения между направляющей и сеялкой спроектировано соединительное устройство, связывающее фиксированную пластину в верхней части направляющей с многорядной пшеничной полосовой сеялкой. Два универсальных плавающих соединения установлены на обоих концах соединительного устройства, что повышает стабильность и гибкость соединения. Эта конструкция уменьшает влияние вертикальных колебаний сеялки на винтовую направляющую при больших крутящих моментах, тем самым повышая стабильность и точность всей системы.
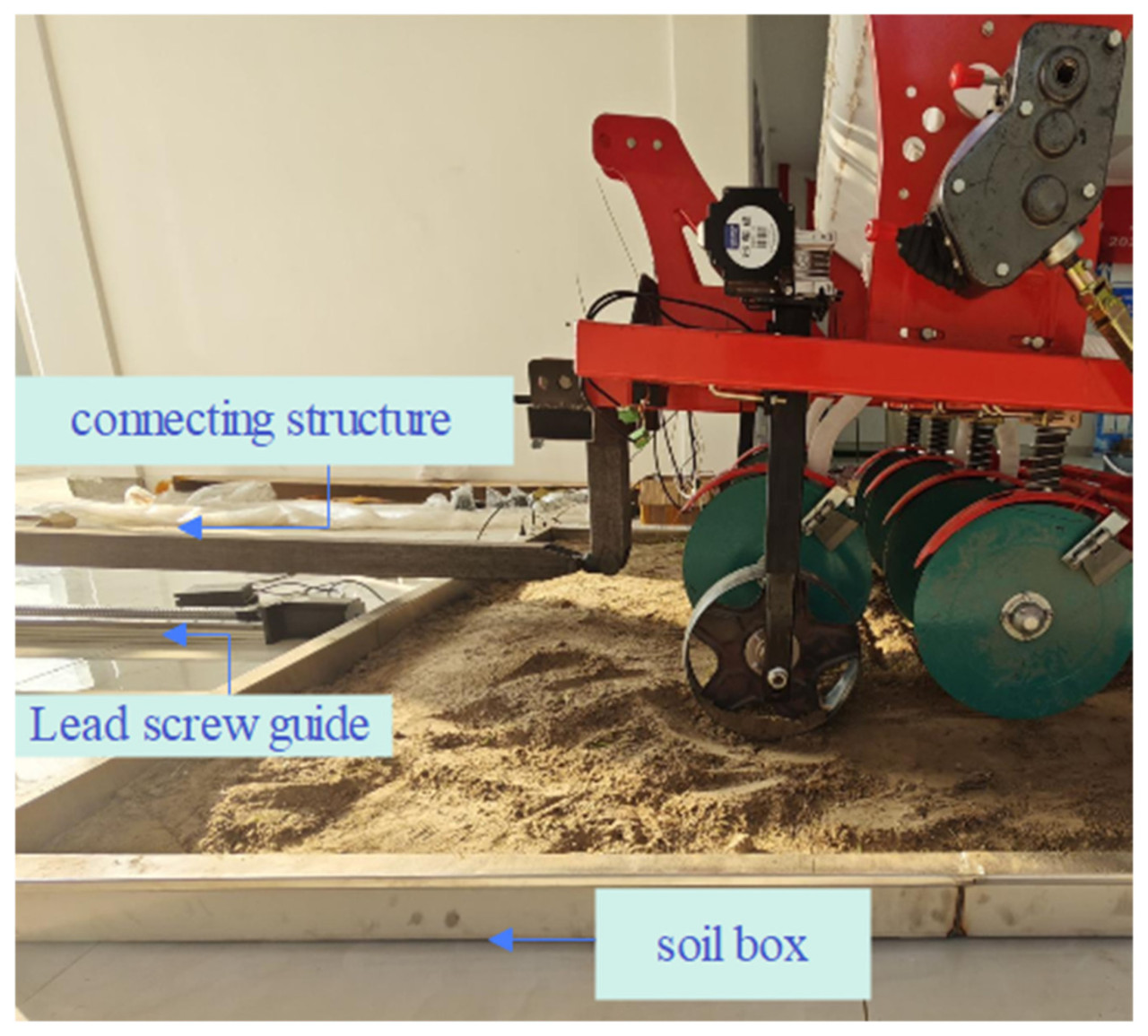
Рисунок 6. Мобильная платформа определения глубины посева.
Места установки ключевых компонентов имеют решающее значение для обеспечения точной работы и эффективной производительности пшеничной сеялки. На Рисунке 7 проиллюстрированы места установки критически важных деталей, таких как лазерный датчик, матричный датчик, шаговый двигатель и редуктор.
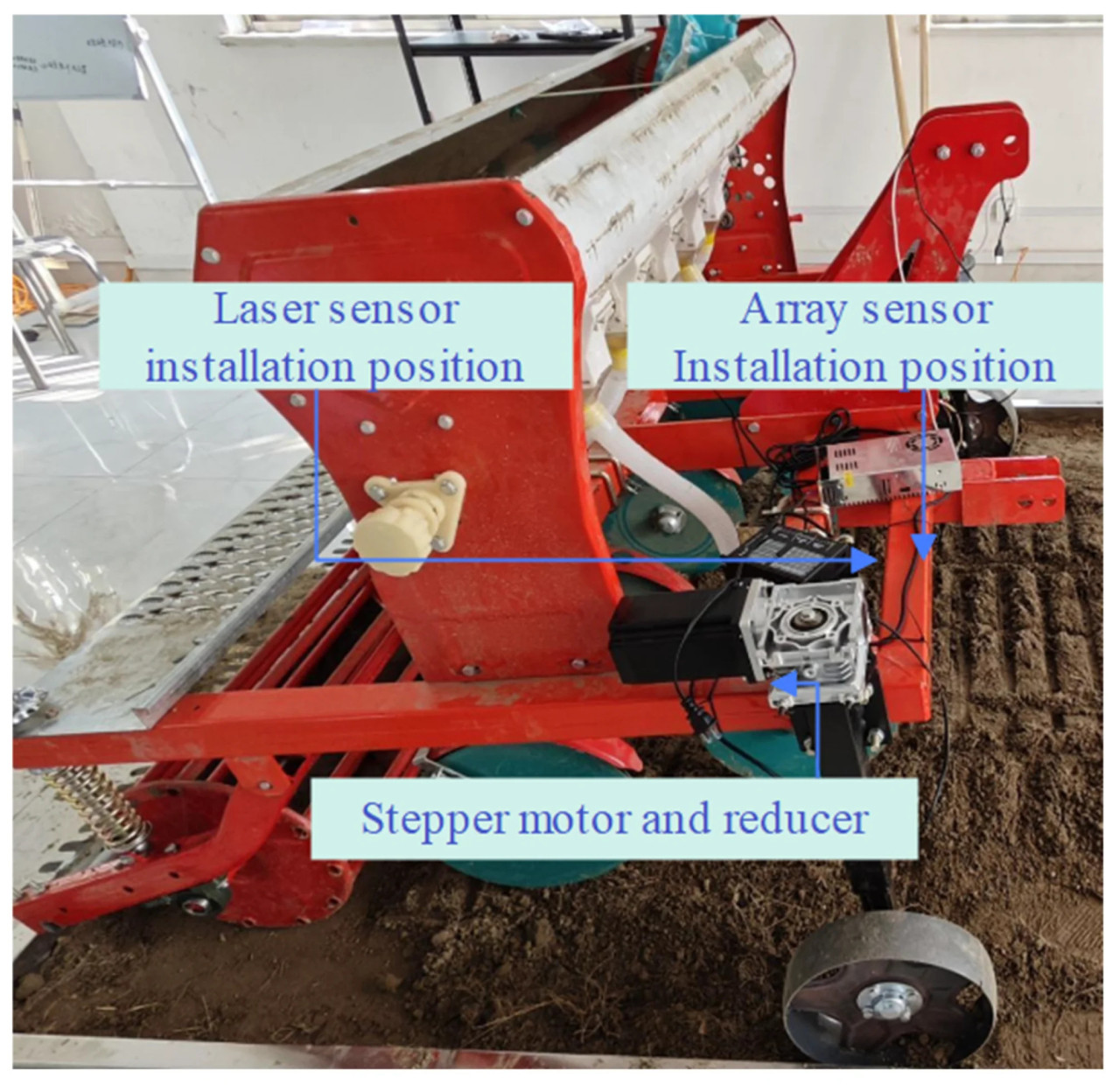
Рисунок 7. Место установки ключевых компонентов пшеничной сеялки.
2.2.2. Аппаратная интеграция многодатчиковой системы
(1) Датчики являются основными компонентами для сбора и обработки данных. С быстрым развитием электронных технологий, в частности инфракрасных, ультразвуковых и матричных радарных датчиков, эти технологии постепенно нашли применение в сельском хозяйстве [35]. Однако из-за сложной почвенной среды во время посева, такой как наличие растительных остатков на поверхности и покрытие сорняками, традиционные ультразвуковые и инфракрасные датчики подвержены помехам при приеме эхо-сигналов, что вызывает ошибки измерения и влияет на точность определения глубины посева [36]. Кроме того, такие устройства, как датчики наклона и энкодеры, сложно напрямую применять на разных машинах. Чтобы решить эти проблемы, в данном исследовании используется матричный датчик площади P8864-SMD-B15, основанный на технологии Time of Flight (ToF).
По сравнению с ультразвуковыми и инфракрасными датчиками, матричный датчик площади обеспечивает более высокую точность и разрешение, а также менее подвержен влиянию изменений освещенности окружающей среды. Более того, этот датчик может генерировать трехмерные облака точек, что дает ему значительное преимущество в моделировании окружающей среды и обнаружении препятствий [37]. Собирая 3D-данные, система может более точно отражать небольшие изменения поверхности почвы, тем самым повышая точность и стабильность определения глубины посева [38]. Параметры матричного датчика показаны в Таблице 4.

Таблица 4. Матричный датчик площади P8864-SMD-B15.
(2) Принцип работы матричного датчика площади P8864-SMD-B15 основан на технологии ToF. Датчик излучает лазерный луч и измеряет время, которое требуется лучу, чтобы отразиться от целевого объекта и вернуться к датчику, что позволяет ему рассчитать расстояние до объекта. В частности, датчик излучает лазерный луч в своей зоне чувствительности, и после отражения лазерного сигнала измеряется время пролета, генерируя высокоточную 3D-карту облака точек с N строками и N столбцами. На Рисунке 8 показан основной принцип работы этого датчика.
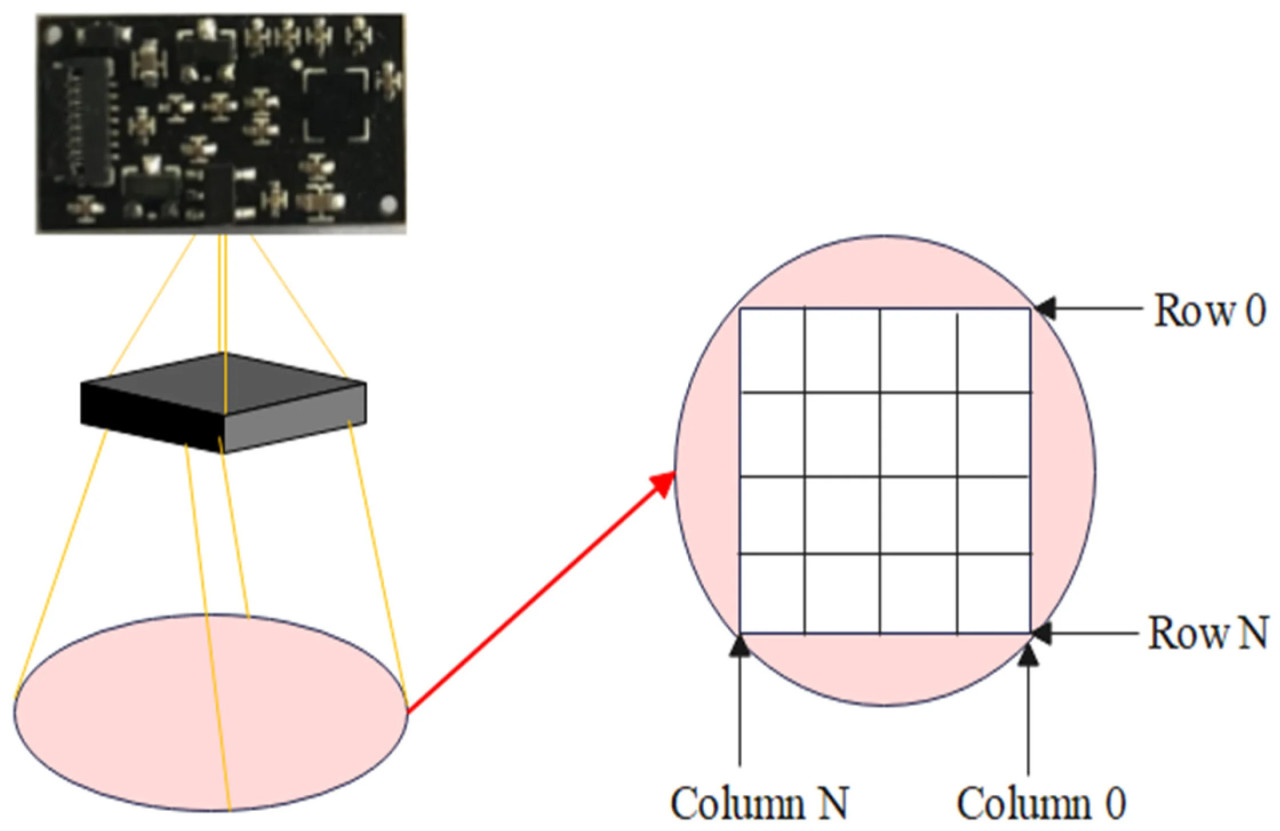
Рисунок 8. Схема топографических данных матричного датчика.
Существует два распространенных режима технологии ToF: прямая импульсная модуляция и непрямая модуляция непрерывной волны. В этом исследовании используется прямая импульсная модуляция. В этом методе излучается узкий лазерный импульс и измеряется временной интервал Δt отраженного эхо-сигнала. Затем используется время-цифровой преобразователь для точного количественного определения временного интервала импульса, и фактическое расстояние между датчиком и целью рассчитывается путем объединения скорости света c следующим образом: l = (c Δt) / 2 [39].
(3) Лазерный датчик STP-23L — это высокоточный измерительный инструмент, в основном состоящий из лазерного дальномерного ядра, главной платы управления и механического корпуса. На Рисунке 9 показана 3D-структура лазерного датчика. Лазерное дальномерное ядро использует технологию измерения DTOF (Direct Time of Flight) и может выполнять измерения расстояния до 120 раз в секунду. Во время каждого измерения излучатель испускает инфракрасный лазерный свет, который отражается целевым объектом и принимается приемным блоком [40]. Затем расстояние рассчитывается с использованием метода времени пролета, который работает на том же принципе, что и матричный датчик. Благодаря своему высокому разрешению и стабильности лазерный датчик очень подходит для использования в системах определения глубины посева, которые чувствительны к изменениям окружающей среды. После получения данных о расстоянии STP-23L отправляет данные в реальном времени через последовательную связь. STP-23L использует разъем SMT 4PIN 1 мм для подключения к внешним системам, обеспечивая питание и прием данных. Связь данных STP-23L использует стандартный асинхронный последовательный порт (UART) для однонаправленной передачи, и после включения питания модуль отправляет данные через последовательный порт. Диапазон параметров лазерного датчика STP-23L показан в Таблице 5.
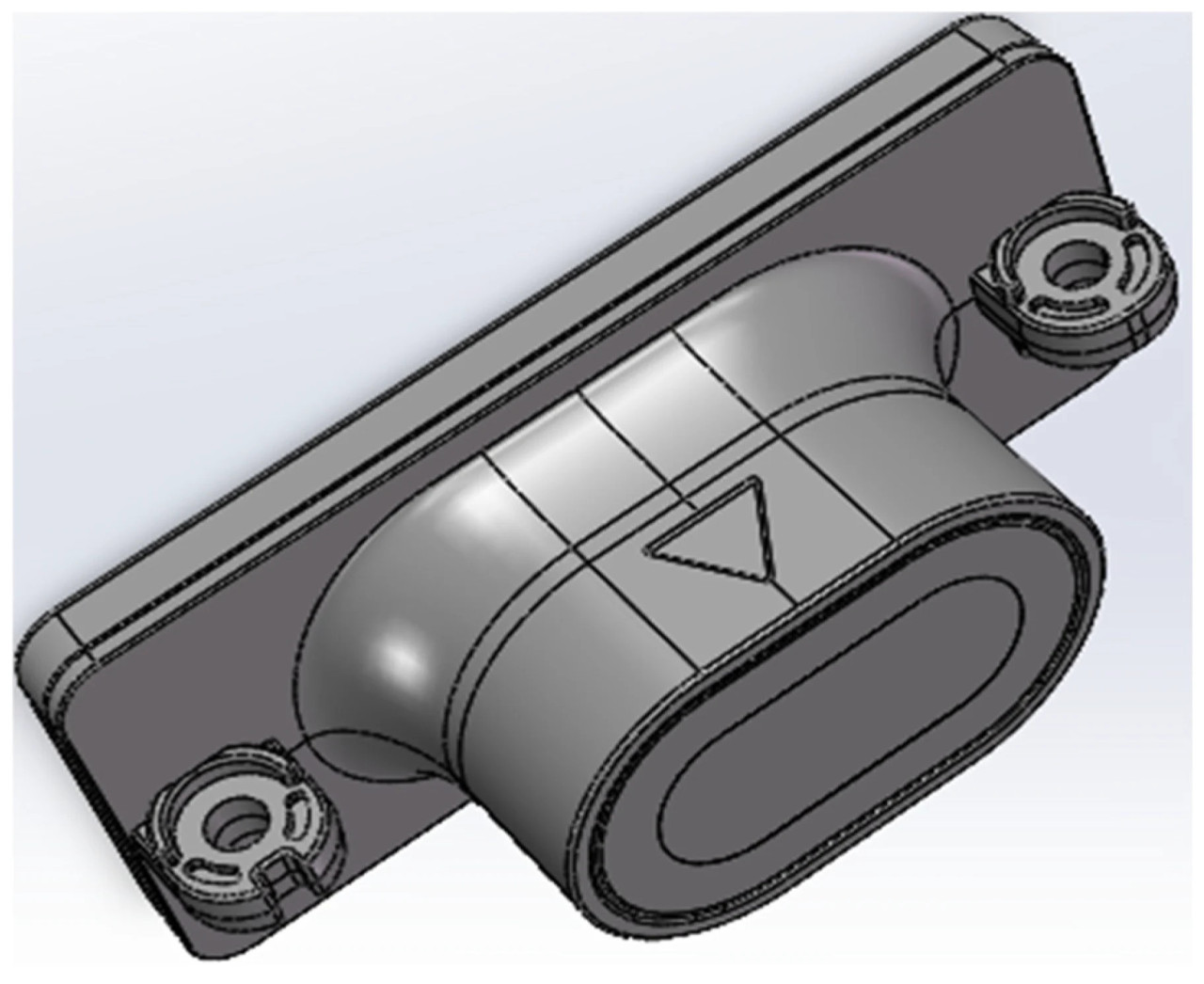
Рисунок 9. 3D-структура лазерного датчика.
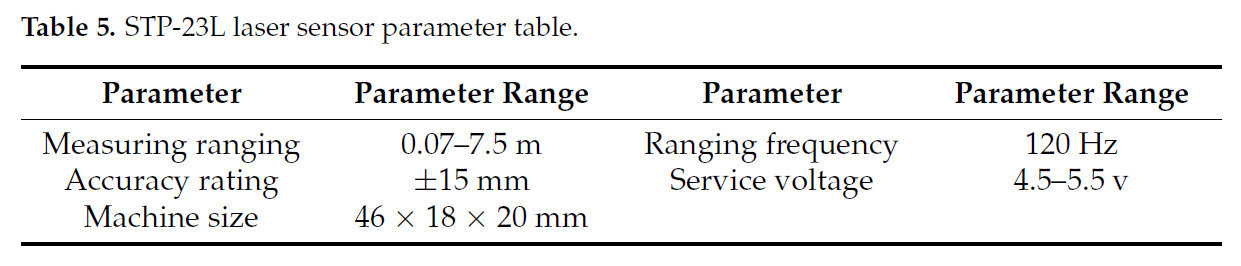
Таблица 5. Таблица параметров лазерного датчика STP-23L.
(4) Система сбора данных о рельефе является ключевым компонентом для достижения точного определения глубины посева пшеницы и стабильного управления. Основная функция этой системы — сбор в реальном времени характеристик рельефа и информации о неровностях поверхности в процессе посева. Кроме того, система может регулировать высоту колеса, ограничивающего глубину, путем ввода импульсов и управления направлением шагового двигателя, предоставляя точные входные данные о рельефе для последующих систем анализа данных и управления. Система сбора данных о рельефе конкретно состоит из матричного датчика площади, лазерного дальномера и модуля сбора данных и связи [41].
Модуль сбора данных подключает лазерный и матричный датчики через высокоскоростные интерфейсы связи (например, COM-порты) для сбора данных с лазерных датчиков и матричных радарных датчиков в реальном времени. Собранные данные затем загружаются в главную систему управления для анализа в реальном времени. Интегрированный модуль показан на Рисунке 10.
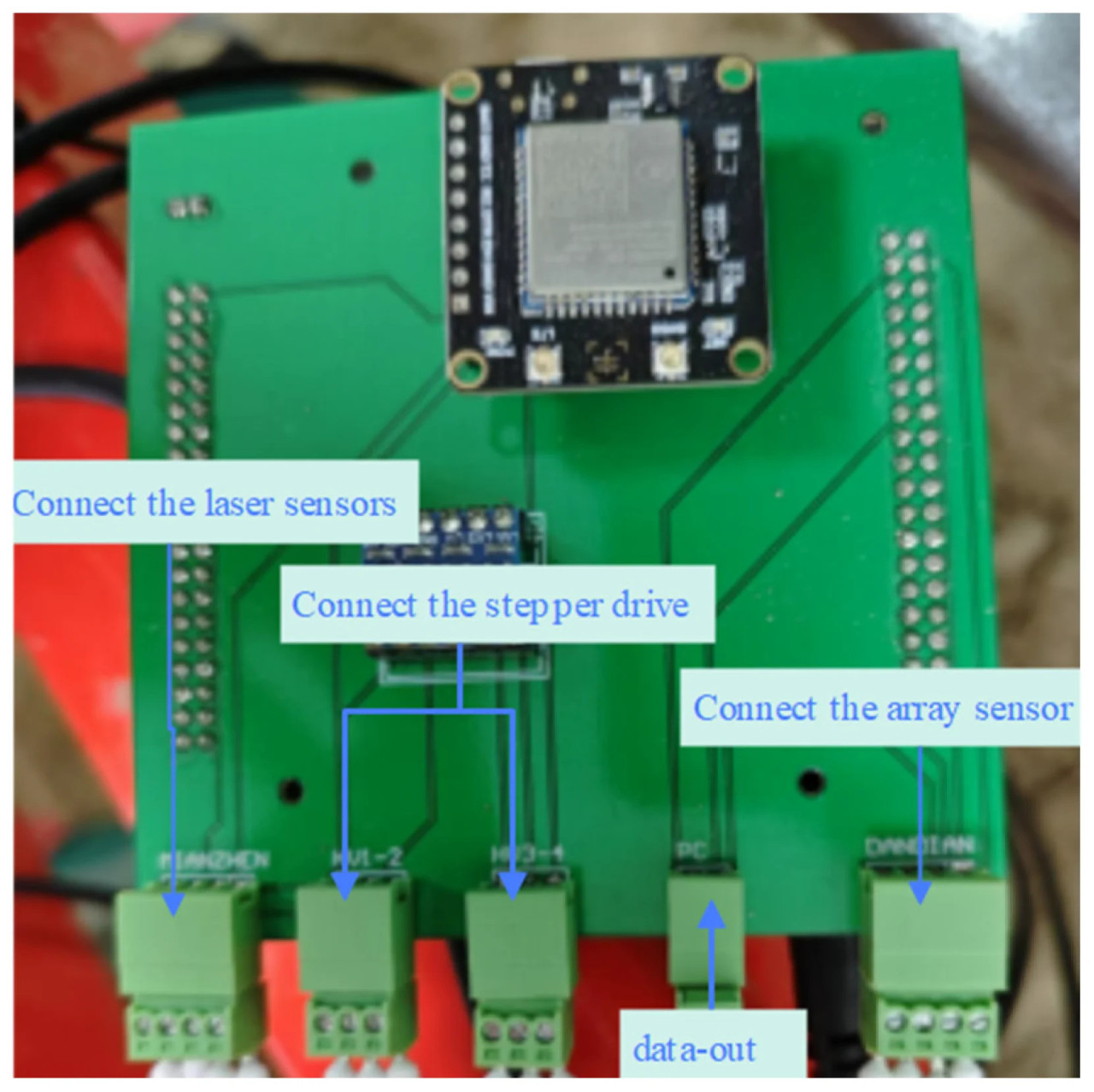
Рисунок 10. Физическое изображение интегрированного модуля.
Интерфейс управляющего программного обеспечения, показанный на Рисунке 11, включает такие функции, как настройка параметров связи, мониторинг приема данных и анализ в реальном времени. Главная система управления обрабатывает данные датчиков и, в сочетании с рабочим состоянием сеялки, рассчитывает характеристики неровностей рельефа. Матричный датчик площади получает матрицу данных рельефа с разрешением 8 × 8 или выше с помощью многоточечной выборки. Лазерный датчик синхронно собирает расстояние до земли в реальном времени, калибрует данные матричного датчика и устраняет системные ошибки.
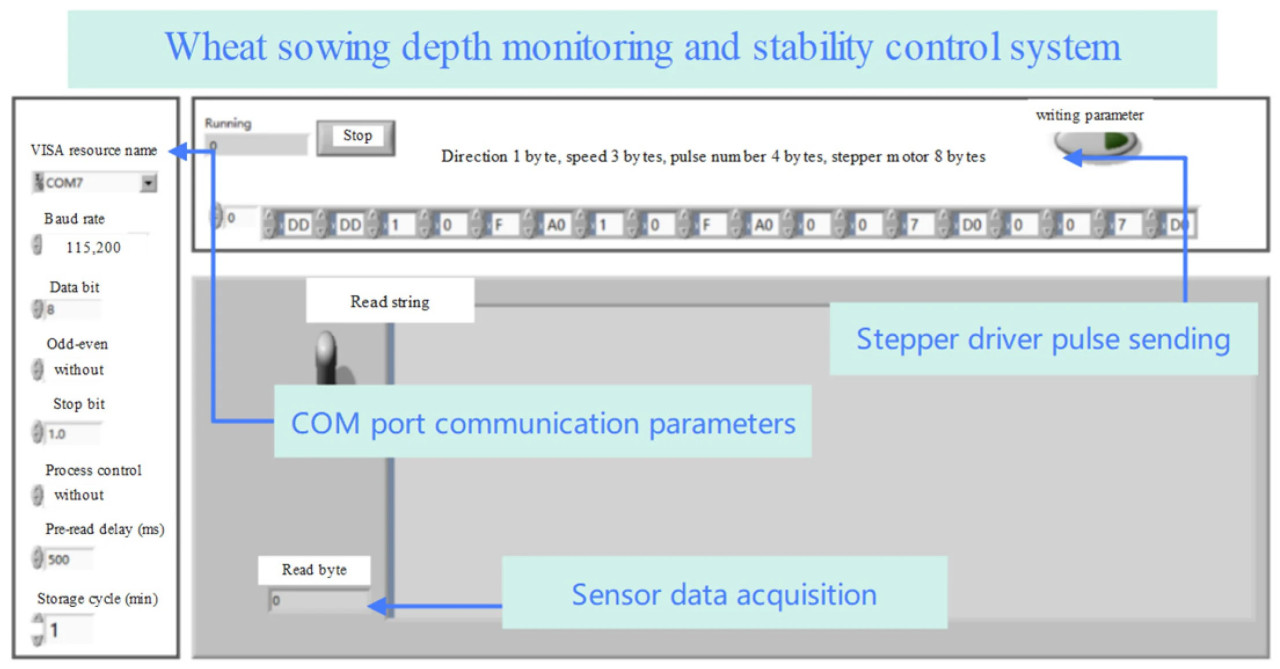
Рисунок 11. Интерфейс системы сбора данных о рельефе.
Преимущества этой системы сбора включают высокоточный сбор данных, а комбинация матричного датчика площади и лазерного дальномера значительно повышает точность обнаружения рельефа. Система способна получать данные о рельефе в реальном времени в процессе посева, предоставляя обратную связь для контроля глубины посева. Система также обладает хорошей адаптируемостью к сложным почвенным условиям, таким как покрытие растительными остатками и неровности почвы.
2.2.3. Калибровка параметров платформы определения глубины посева и ее эффективность
В реальном процессе посева неровности поверхности почвы, такие как частицы, поры и остатки пшеничной соломы, могут мешать нормальным измерениям датчиков, тем самым влияя на точность обнаружения. Поэтому для обеспечения надежности платформы определения глубины посева необходимы калибровочные эксперименты для лазерного датчика и матричного датчика.
(1) Калибровка датчика
Чтобы проверить точность измерения расстояния матричным датчиком, в этом исследовании были проведены калибровочные эксперименты для матричного датчика площади P8864-SMD-B15 в лабораторных условиях [42]. Датчик был закреплен на раме, и его угол и расстояние до целевого объекта постепенно регулировались для моделирования различных типичных условий рельефа для сбора данных. Конкретные экспериментальные сценарии включали следующие три (Рисунок 12).

Рисунок 12. Три типа поверхности почвы: (a) Ровная поверхность, покрытая соломой. (b) Ровная поверхность без соломы. (c) Поверхность почвы с уклоном 10°.
(a) Гладкая поверхность без соломы: Проверялась производительность датчика на стандартной почвенной плоскости путем сбора 3D-данных рельефа для оценки его базовой способности измерения расстояния.
(b) Поверхность, покрытая соломой: Поверхность почвы была полностью покрыта пшеничной соломой, и данные собирались непосредственно с датчика для обнаружения рельефа соломы, оценивая влияние помех от соломы на результаты измерений.
(c) Изменение уклона: Были установлены поверхности почвы с различными уклонами (например, 5°, 10°, 15°), и были собраны данные о рельефе под разными углами наклона для проверки реакции датчика на изменения уклона.
Результаты эксперимента показывают, что покрытие соломой незначительно влияет на измерения как лазерного датчика, так и матричного датчика. Поэтому последующие эксперименты проводились с использованием почвы без соломенного покрытия в качестве стандартной среды для исследования.
Когда матричный датчик был помещен на расстоянии 250 мм от гладкой поверхности почвы, полученная карта тепловыделения расстояния показана на Рисунке 13a. Как видно из рисунка, общая ошибка измерения датчика на этом расстоянии невелика, а точность высока. Когда расстояние измерения было увеличено до 450 мм, полученная карта тепловыделения расстояния показана на Рисунке 13b. В этот момент данные незначительно выше нормального значения, что свидетельствует о том, что точность измерений датчика начинает снижаться. Более того, анализируя изменение ошибки измерения по мере увеличения измерительного расстояния матричного датчика с 200 мм до 500 мм, было обнаружено, что ошибка измерения постепенно увеличивалась с расстоянием.
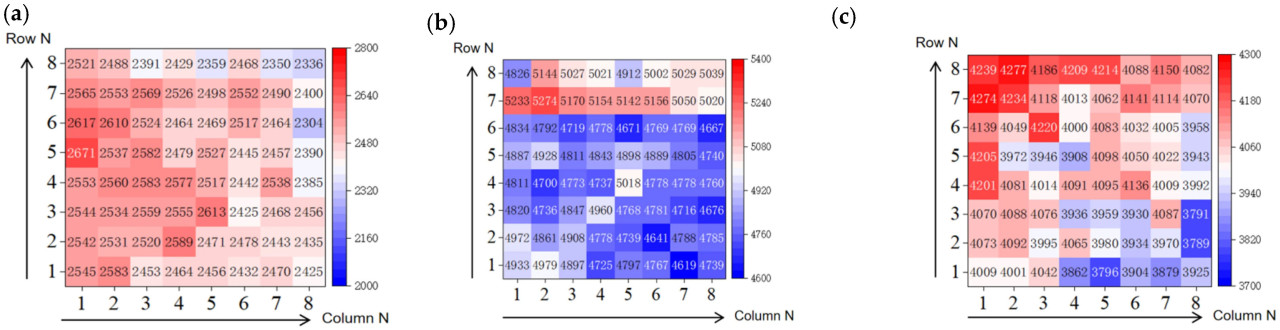
Рисунок 13. Карта тепловыделения измерения расстояния матричным датчиком: (a) расстояние 250 мм. (b) расстояние 450 мм. (c) расстояние 350 мм, угол наклона 10°.
В эксперименте матричный датчик был помещен примерно на 350 мм выше почвы, и испытания проводились при угле наклона почвы 10°. Полученная карта тепловыделения рельефа показана на Рисунке 13c. Результаты показывают, что даже на наклонной местности датчик все еще способен точно улавливать неровности рельефа.
Учитывая, что фактическое расстояние между рамой сеялки и землей составляет около 500 мм, точность измерения матричного датчика на этом расстоянии недостаточна для получения точных численных значений (как показано на Рисунке 14). Однако он по-прежнему эффективно извлекает характеристики неровностей рельефа. Поэтому данное исследование спроектировало систему для использования матричного датчика для извлечения характеристик рельефа, без использования его прямой способности измерения расстояния. Этот выбор не только соответствует практическим потребностям применения, но и максимизирует преимущества матричного датчика в извлечении характеристик.
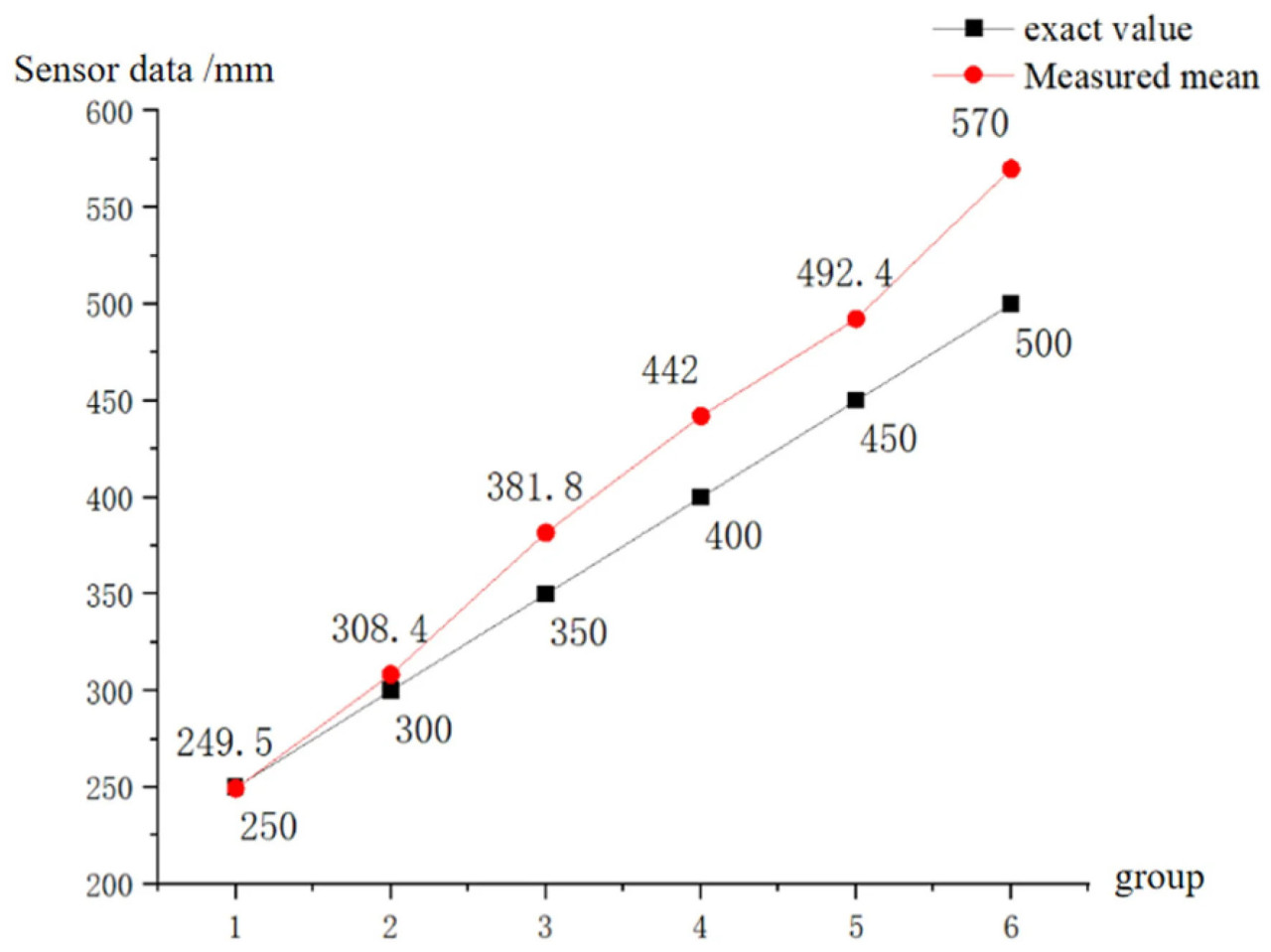
Рисунок 14. Сравнение измеренных данных матричного датчика с точным значением.
(2) Калибровка шагового двигателя
В этом исследовании было проведено лабораторное испытание с возвратно-поступательным движением для измерения ошибки движения шагового двигателя. В испытании использовался компьютерный последовательный порт для отправки команд положения движения на микроконтроллер, выполняя испытания с различными расстояниями движения. Типичная глубина посева пшеницы составляет от 30 до 50 мм; поэтому испытание было настроено с пятью диапазонами расстояний, каждый с шагом 5 мм. Для каждого диапазона испытание повторялось пять раз для движения туда и обратно, и бралось среднее значение. Начальное положение электрического цилиндра было отмечено маркером, а изменение положения после движения измерялось с помощью штангенциркуля. Испытание по измерению ошибки движения электрического цилиндра показано на Рисунке 15. Результаты эксперимента показаны в Таблице 6.
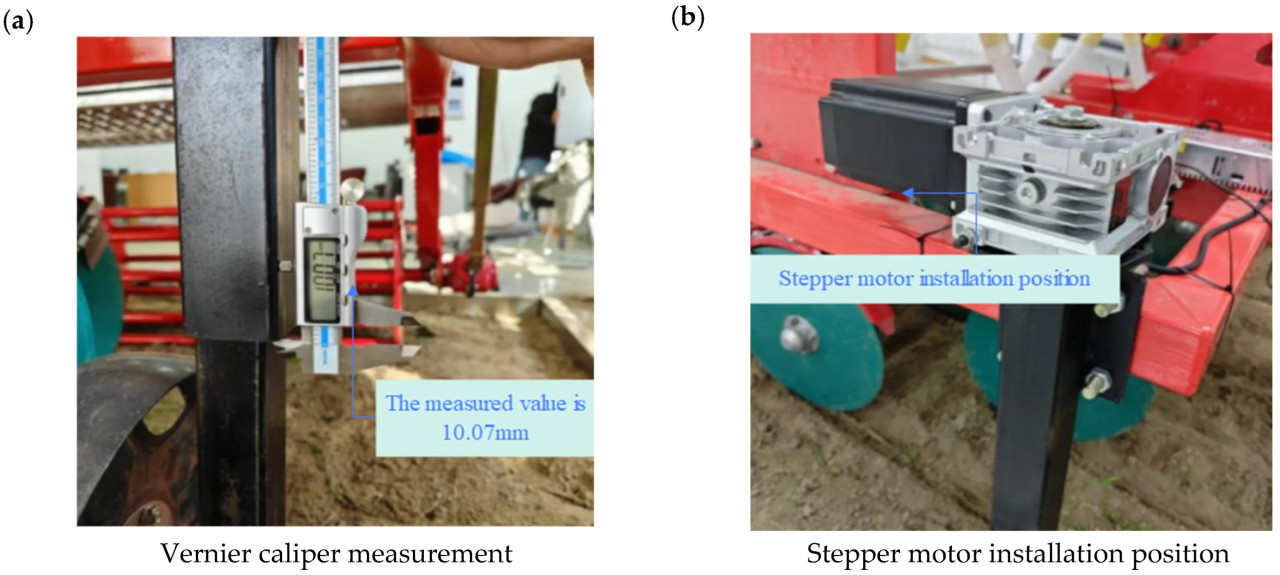
Рисунок 15. Испытание по измерению ошибки движения электрического цилиндра: (a) Измерение штангенциркулем. (b) Место установки шагового двигателя.
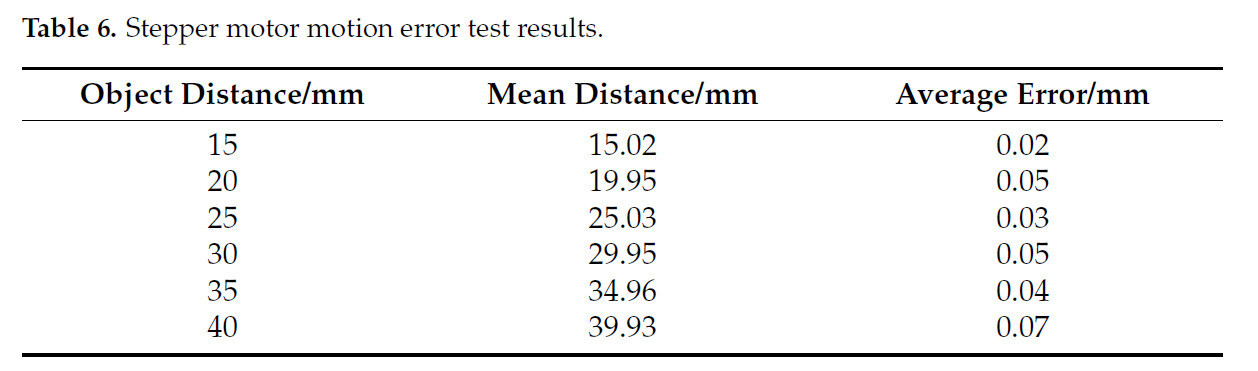
Таблица 6. Результаты испытаний ошибки движения шагового двигателя.
Из Таблицы 6 видно, что максимальная средняя ошибка движения шагового двигателя составляет 0,06 мм. Согласно «Техническим стандартам оценки качества сеялок», допустимый диапазон глубины посева составляет ±5 мм или ±10 мм от текущей заданной глубины посева. В этом исследовании средняя ошибка движения шагового двигателя составляет всего от 0,6% до 1,2% от допустимого диапазона глубины посева, что соответствует экспериментальным требованиям.
Анализируя механическую структуру шагового двигателя, исследование пришло к выводу, что ошибка в основном обусловлена двумя факторами: смещением внутренних магнитных полюсов двигателя и нестабильным током возбуждения. Для уменьшения ошибок, вызванных зазорами, необходимы улучшения в процессе изготовления электрического цилиндра.
3. Результаты и обсуждение
3.1. Испытание производительности влияния различных условий рельефа на глубину посева полосовой сеялки
3.1.1. Определение и контроль экспериментальных переменных
Чтобы изучить влияние различных условий рельефа на стабильность глубины посева полосовой сеялки, в качестве объектов исследования были выбраны три типичных условия рельефа:
Ровный почвенный рельеф (Рисунок 16a), моделирующий идеальные условия рельефа, при которых рабочая глубина сошника относительно стабильна. Выпуклый и вогнутый почвенный рельеф (Рисунок 16b, c), моделирующий подъемы и впадины почвы для анализа возможных колебаний глубины посева.
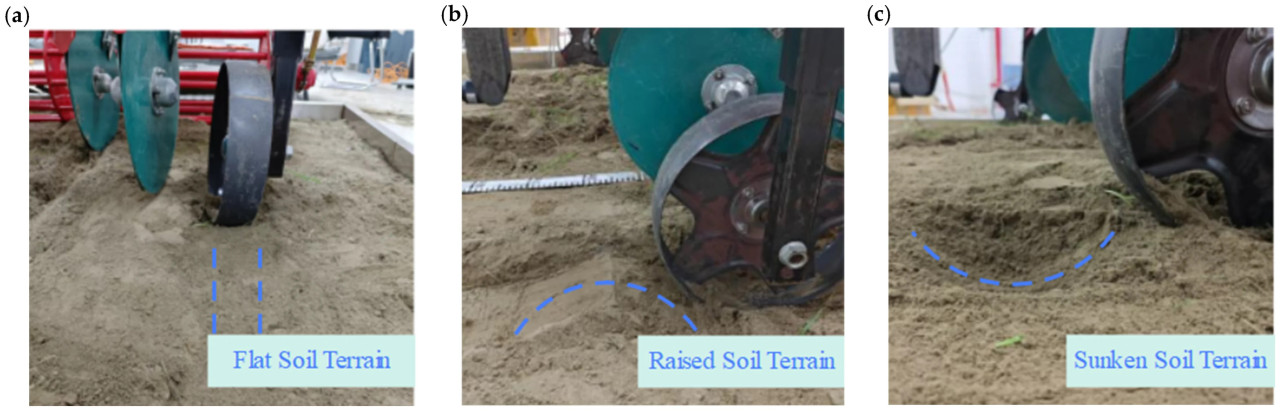
Рисунок 16. Три типичных типа рельефа: (a) Ровный почвенный рельеф. (b) Выпуклый почвенный рельеф. (c) Вогнутый почвенный рельеф. (c) Вогнутый почвенный рельеф.
Путем ручного контроля и организации экспериментального участка было обеспечено, что условия рельефа соответствовали проектным стандартам. Кроме того, использовалась система, сочетающая колесо, ограничивающее глубину, и лазерный датчик для мониторинга глубины посева в реальном времени и сбора соответствующих данных о глубине.
3.1.2. Анализ реакции производительности полосовой сеялки
Анализ реакции производительности полосовой сеялки является основной частью оценки эффективности работы сеялки в различных условиях рельефа. Целью является изучение влияния неровностей рельефа на определение глубины посева, количественная оценка производительности сеялки в различных условиях рельефа и предоставление данных для оптимизации конструкции.
Были проведены имитационные эксперименты на ровном, выпуклом и вогнутом рельефах для анализа влияния различных характеристик рельефа на глубину посева. Выпуклый рельеф может приводить к меньшей глубине посева, в то время как вогнутый рельеф может приводить к большей глубине посева. Эти колебания напрямую связаны с характером контакта между поверхностью почвы и колесом, ограничивающим глубину, а также с рабочей глубиной сошника.
В эксперименте используются среднее значение, стандартное отклонение и отклонение глубины посева в качестве основных показателей производительности. В сочетании с данными обратной связи от датчиков в различных условиях рельефа оцениваются стабильность и равномерность работы сеялки. Путем извлечения и анализа характерных значений матрицы уклонов (таких как среднее значение и стандартное отклонение) устанавливается количественная зависимость между факторами рельефа и отклонением глубины посева.
Во время эксперимента как лазерный датчик, так и матричный датчик использовались для одновременного сбора данных о глубине посева и рельефе, и данные обрабатывались с помощью фильтрации, сглаживания и нормализации для обеспечения точности анализа. Анализ главных компонентов (PCA) использовался для извлечения ключевых признаков данных, удаления избыточной информации и предоставления упрощенной модели для прогнозирования отклонений глубины посева.
Основываясь на экспериментальном анализе, были скорректированы ключевые параметры сеялки (такие как положение колеса, ограничивающего глубину, и скорость посева) для улучшения ее способности адаптироваться к сложным условиям рельефа, обеспечивая тем самым качество и эффективность посевной операции.
3.2. Экспериментальное оборудование и процесс
3.2.1. Условия и процесс эксперимента
Эксперимент был проведен на созданной в помещении платформе определения глубины посева. После включения шагового двигателя устройство контроля глубины посева перешло в рабочее состояние. Различные типы рельефа были установлены вдоль пути движения полосовой сеялки, и характерные данные каждого рельефа были получены матричным датчиком через систему обнаружения. Согласно государственным стандартам глубины посева пшеницы, глубина посева пшеницы установлена в пределах от 3 до 5 см. Поэтому в данном эксперименте глубина посева была предварительно установлена на 40 мм. Сошник был опущен примерно на 40 мм путем управления подъемным механизмом шагового двигателя, затем направляющая была приведена в действие, позволяя колесу, ограничивающему глубину, проходить по различным типам рельефа.
Во время эксперимента значение глубины посева измерялось лазерным датчиком до начала движения сеялки. После того как сеялка проехала, фактическая глубина посева в том же месте измерялась вручную штангенциркулем. На Рисунке 17 показано фактическое значение 37,13 мм, полученное при ручном измерении. Для обеспечения точности фактическая глубина посева была получена с помощью множественных измерений в одной точке, и было рассчитано среднее значение этих величин. Разница между усредненной фактической глубиной посева и значением, полученным лазерным датчиком, дала значение отклонения глубины посева.
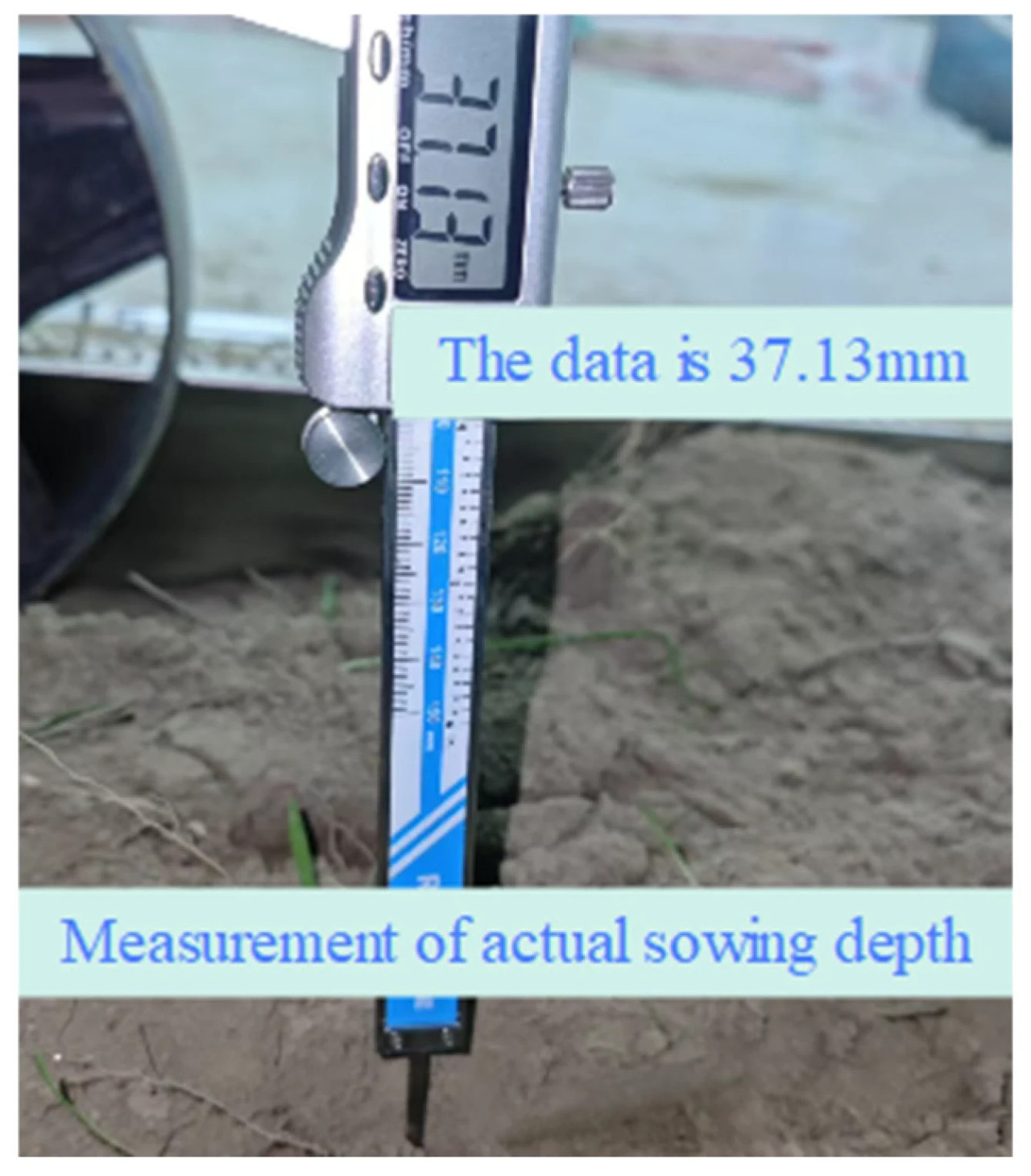
Рисунок 17. Фактическая глубина посева, измеренная вручную.
3.2.2. Результаты испытаний и анализ
Результаты эксперимента показывают, что после применения скользящего фильтра сглаживания к данным о высоте рельефа, полученным матричным датчиком, были успешно сгенерированы 3D-поверхности трех типичных рельефов, наглядно показывающие изменения высоты на различных типах рельефа. Цветовой градиент от синего к красному представляет изменение высоты рельефа. 3D-поверхность выпуклого рельефа (Рисунок 18a) показывает заметный выпуклый центр со спадающей тенденцией к краям, что свидетельствует о значительном изменении высоты рельефа. Это демонстрирует, что матричный датчик способен эффективно улавливать резкие изменения высоты, которые имеют решающее значение для изучения влияния выпуклого рельефа на отклонения глубины посева.
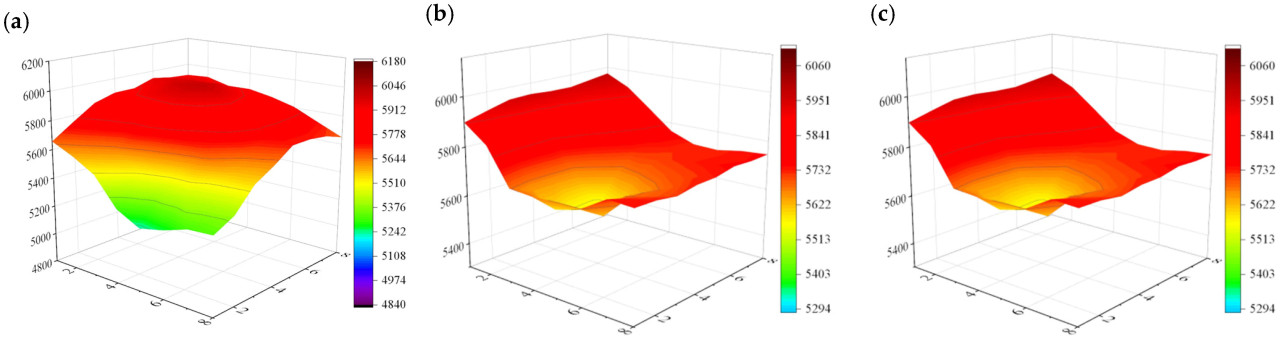
Рисунок 18. Трехмерная поверхностная диаграмма типичного рельефа: (a) 3D-поверхность выпуклого рельефа. (b) 3D-поверхность вогнутого почвенного рельефа. (c) 3D-поверхность ровного почвенного рельефа.
3D-поверхность вогнутого рельефа (Рисунок 18b) демонстрирует вогнутый центр с постепенным подъемом по краям, образуя блюдцеобразную впадину. 3D-поверхность ровного рельефа (Рисунок 18c) почти гладкая, что указывает на минимальное изменение высоты рельефа. Даже в условиях ровного рельефа матричный датчик все еще может наблюдать неровности рельефа из-за низкой отражательной способности поверхности и ограничений точности датчика. Это подчеркивает важность дальнейшей оптимизации калибровки датчика для уменьшения ошибок в условиях ровного рельефа, обеспечивая стабильную точность на всех типах рельефа.
3.3. Анализ данных и построение модели
В этом эксперименте анализ данных включал преобразование матрицы расстояний, полученной от матричного датчика, в матрицу уклонов. После удаления шумов, сглаживания и нормализации были извлечены характерные значения (среднее значение уклона, стандартное отклонение уклона, диапазон уклона). Каждый набор характерных значений соответствует значению отклонения глубины посева. Наконец, для объяснения дисперсии характерных значений и построения модели использовался анализ главных компонентов (PCA).
Во-первых, данные, полученные от матричного датчика, были подвергнуты предварительной обработке. Удаление шумов выполнялось с использованием комбинации медианной фильтрации и фильтрации скользящего среднего, направленной на устранение шумовых помех и обеспечение гладкости и непрерывности данных. Затем была выполнена нормализация с использованием метода стандартизации Z-Score, который преобразует данные в форму со средним значением 0 и стандартным отклонением 1. Конкретная формула расчета: z = (x - μ) / σ, где x — исходные данные, μ — среднее значение, σ — стандартное отклонение.
На основе очищенных и нормализованных данных была сгенерирована матрица уклонов 6 × 6 путем расчета локального уклона пространственных точек. Метод расчета уклона использует градиенты в направлениях осей X и Y, полученные с помощью формул конечных разностей. Расчет основан на матрице высот, как проиллюстрировано сеткой 3 × 3 на Рисунке 19, где каждая ячейка (i, j) представляет конкретное значение высоты рельефа. Например, центральная ячейка (1,1) окружена соседними ячейками во всех направлениях, и разницы высот между этими соседними ячейками используются для вычисления градиентов в направлениях X и Y. Затем эти градиенты объединяются для определения уклона в каждой внутренней точке сетки, предоставляя детальное представление о крутизне рельефа. Для обеспечения достоверности данных расчет матрицы уклонов учитывает только неграничные точки, в результате чего для окончательной матрицы уклонов получается область 6 × 6. Формула расчета уклона выглядит следующим образом:

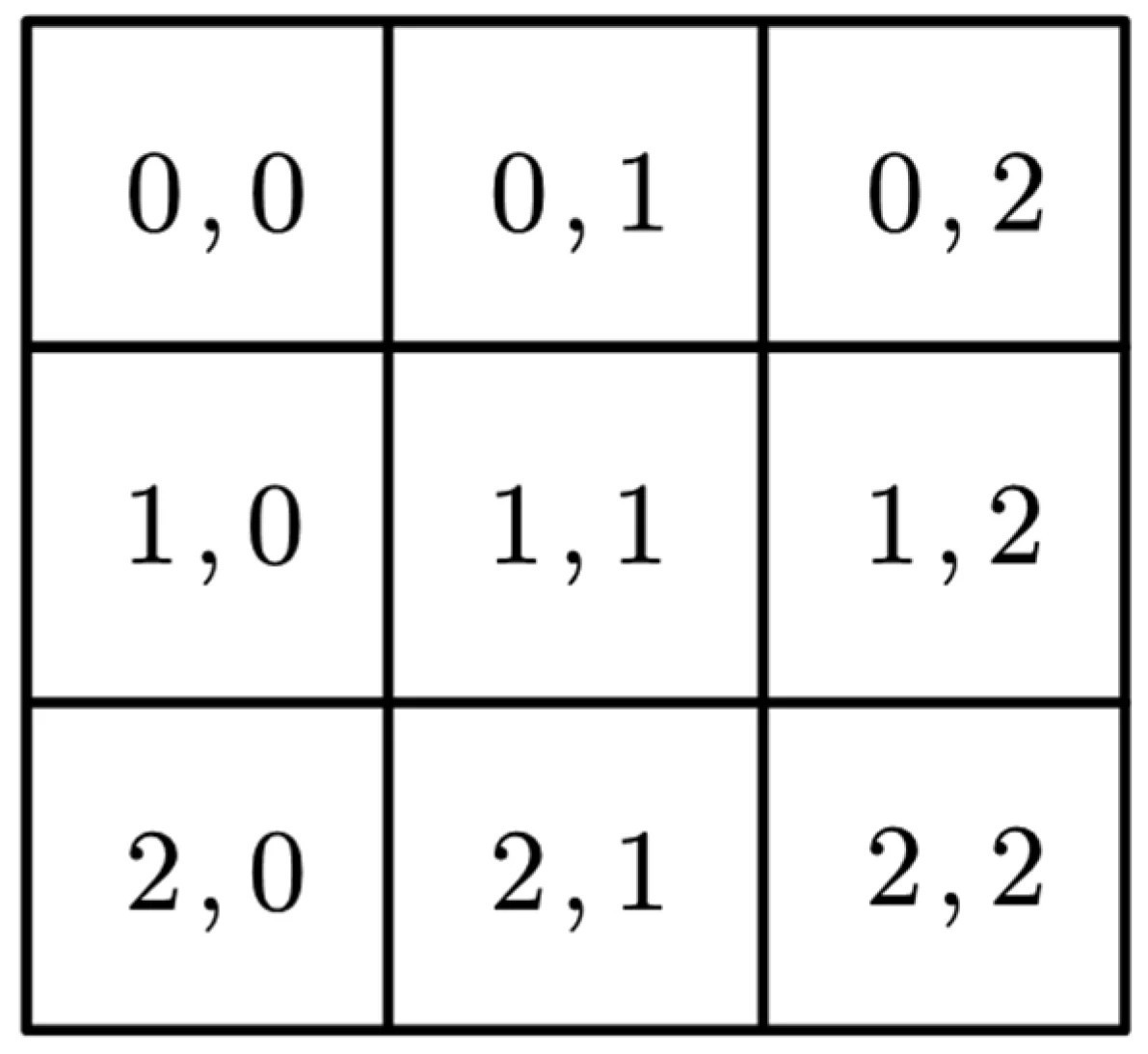
Рисунок 19. Ячейки рельефа 3 × 3.
На основе матрицы уклонов были извлечены три ключевых характерных значения: среднее значение уклона (μ_s), стандартное отклонение уклона (σ_s) и диапазон уклона (R_S). Эти характеристики используются для описания общих характеристик уклона рельефа: среднее значение уклона отражает общий уровень уклона, стандартное отклонение уклона описывает степень колебаний уклона, а диапазон уклона представляет разницу между максимальным и минимальным уклонами, отражая степень разброса уклонов. Эти характерные значения были извлечены в качестве входных переменных и соотнесены с соответствующими значениями отклонения глубины посева.
В анализе данных для уменьшения размерности характерных значений использовался анализ главных компонентов (PCA). PCA — это часто используемый метод уменьшения размерности, который преобразует множество коррелированных исходных переменных в набор новых некоррелированных переменных (главных компонентов) с помощью линейных преобразований. Главные компоненты упорядочены по дисперсии, причем первые несколько главных компонентов сохраняют основную информацию исходных данных, уменьшая при этом размерность данных, удаляя избыточные признаки и повышая вычислительную эффективность [43]. В этом исследовании, поскольку между средним значением уклона, стандартным отклонением уклона и диапазоном уклона может существовать некоторая линейная корреляция, выполнение прямой множественной линейной регрессии может привести к нестабильности модели. Поэтому для уменьшения размерности входных переменных использовался PCA, чтобы решить проблему мультиколлинеарности между признаками и таким образом построить более стабильную регрессионную модель.
В этом эксперименте сравнивались значения определения глубины посева в различных условиях рельефа, а характерные значения матрицы уклонов и соответствующие им значения отклонения глубины посева показаны в Таблице 7.
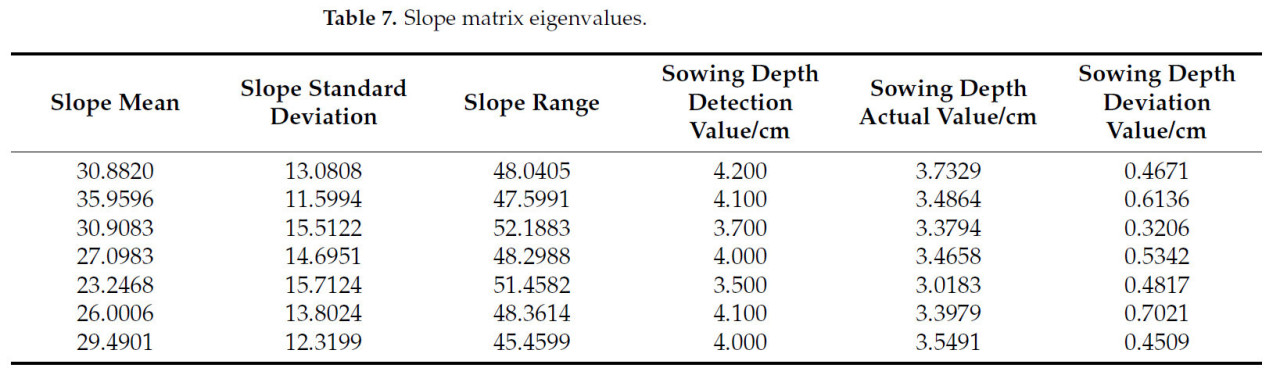
Таблица 7. Собственные значения матрицы уклонов.
Результаты анализа PCA продемонстрировали, что среднее значение уклона и стандартное отклонение уклона являются основными факторами, влияющими на отклонения глубины посева, связанные с рельефом. Первый главный компонент, среднее значение уклона, объяснил 75,29% общей дисперсии, в то время как второй главный компонент, стандартное отклонение уклона, внес 23,11%. Вместе эти два компонента объяснили 98,51% общей дисперсии, что свидетельствует о том, что они эффективно улавливают почти всю существенную информацию о характеристиках рельефа. И наоборот, третий главный компонент, диапазон уклона, внес только 1,60% и, как было определено, имеет незначительное влияние, что позволяет исключить его для уменьшения сложности модели без значительной потери репрезентативности.
Анализ также выявил четкую взаимосвязь между характеристиками рельефа и отклонениями глубины посева. На выпуклых или вогнутых рельефах фактическая глубина посева была стабильно ниже измеренной глубины. Это отклонение было сильно коррелировано со средним значением уклона и, в меньшей степени, со стандартным отклонением уклона, в то время как диапазон уклона не показал значительного влияния. В частности, среднее значение уклона оказалось наиболее влиятельным фактором, причем его значение прямо пропорционально величине отклонения глубины посева. Стандартное отклонение уклона, хотя и менее влиятельное, все же вносило вклад в изменения глубины.
Резюмируя, результаты подчеркивают, что чем больше среднее значение уклона и стандартное отклонение уклона рельефа, тем больше отклонение глубины посева. Эти результаты подчеркивают важность сосредоточения внимания на среднем значении уклона как на доминирующем факторе при прогнозировании и коррекции отклонений глубины посева, предоставляя четкое направление для дальнейшей оптимизации систем посева, адаптирующихся к рельефу.
3.4. Анализ экспериментальных результатов
Хотя эксперименты предоставили ценные сведения о взаимосвязи между характеристиками рельефа и точностью глубины посева, необходимо признать несколько ограничений и соображений.
(a) Условия эксперимента и репрезентативность
Эксперименты проводились в контролируемых лабораторных условиях с использованием имитационного почвенного лотка, который, хотя и эффективен для изоляции конкретных переменных, может не полностью отражать сложность реальных полевых условий. Такие факторы, как различная влажность почвы, неоднородность уплотнения и природные остатки, были упрощены или исключены, что потенциально ограничивает применимость результатов к реальным сценариям.
(b) Производительность и стабильность датчиков
Лазерный и матричный датчики продемонстрировали стабильную производительность во время испытаний, но их стабильность в колеблющихся условиях окружающей среды, таких как экстремальные температуры или высокий уровень окружающего освещения, не была всесторонне оценена. Эти факторы могут влиять на надежность определения глубины посева в полевых условиях, в частности на неровной или наклонной местности.
4. Выводы
(1) Преимущества многодатчиковой испытательной платформы слияния
Разработанная в этом исследовании многодатчиковая испытательная платформа слияния обеспечивает высокоточный сбор в реальном времени характеристик рельефа и значений глубины посева в процессе посева благодаря совместной работе лазерных датчиков и матричных датчиков. Применение алгоритмов фильтрации и нормализации эффективно снижает влияние сложных рельефов и переменных рабочих условий на данные датчиков, обеспечивая превосходную адаптируемость платформы к окружающей среде. Кроме того, платформа может собирать многомерные данные о характеристиках рельефа, такие как среднее значение, стандартное отклонение и диапазон матрицы уклонов, предоставляя важнейшую поддержку данных для контроля глубины посева и коррекции ошибок. Это также закладывает технологическую основу для будущей разработки автоматизированных систем контроля глубины посева.
(2) Влияние различных условий рельефа на глубину посева
Это исследование показывает, что уклон рельефа является важным фактором, влияющим на глубину посева. По мере увеличения уклона отклонение глубины посева значительно возрастает, в частности в условиях крутого склона. Более того, среднее значение, стандартное отклонение и диапазон матрицы уклонов могут в некоторой степени отражать влияние характеристик рельефа на отклонение глубины посева. Однако их объяснительная способность варьируется из-за сложности распределения данных, и в сложных условиях рельефа могут потребоваться дополнительные признаки (такие как уплотнение почвы и скорость посева) для дальнейшей коррекции. Исследование также показало, что чем ровнее рельеф, тем меньше отклонение глубины посева, что свидетельствует о том, что выровненность рельефа играет ключевую роль в стабильности глубины посева.
(3) Основные результаты экспериментального анализа
Экспериментальный анализ продемонстрировал, что ключевые характеристики рельефа, влияющие на точность глубины посева, улавливаются в основном двумя главными компонентами: средним значением уклона и стандартным отклонением уклона. Это понимание предоставляет четкое представление о том, как уклоны рельефа напрямую влияют на отклонение глубины посева. Сосредоточив внимание на этих двух признаках, мы можем лучше прогнозировать и корректировать изменения глубины, тем самым повышая точность посевных операций.
Интеграция экспериментальных результатов с физическими моделями значительно оптимизировала алгоритм управления колесом, ограничивающим глубину. Эта оптимизация является важным шагом на пути к созданию интеллектуальных систем посева, способных автономно адаптироваться к различным условиям рельефа. В частности, понимание, полученное на основе среднего значения уклона и стандартного отклонения уклона, позволяет создавать адаптивные стратегии управления для колеса, ограничивающего глубину, обеспечивая стабильность глубины посева даже на неровном рельефе.
Результаты также открывают путь к внедрению систем автоматической коррекции глубины в реальном времени. Используя данные рельефа и извлеченные признаки, будущие системы смогут динамически регулировать положение колеса, ограничивающего глубину, для компенсации колебаний рельефа, таких как выпуклые или вогнутые участки, которые часто встречаются на сельскохозяйственных полях. Эта адаптивная возможность не только повышает точность и стабильность глубины посева, но и решает эксплуатационные проблемы, связанные с изменчивостью почвы, покрытием растительными остатками и локальными изменениями уклона.
В практическом плане эти результаты закладывают основу для интеллектуальных сеялок, способных поддерживать оптимальную глубину посева в различных и непредсказуемых условиях рельефа. Эта адаптивная система управления может произвести революцию в посевных операциях, обеспечивая равномерное размещение семян, улучшая рост культур и, в конечном итоге, повышая стабильность урожайности.
Ссылки
1. Nielsen, S.K.; Munkholm, L.J.; Lamandé, M.; Norremark, M.; Skou-Nielsen, N.; Edwards, G.T.C.; Green, O. Seed drill instrumentation for spatial coulter depth measurements. Comput. Electron. Agric. 2017, 141, 207–214. [Google Scholar] [CrossRef]
2. Romaneckas, K.; Steponavičius, D.; Jasinskas, A.; Kazlauskas, M.; Naujokiene, V.; Bruciene, I.; Svereikaite, A.; Sarauskis, E. How to analyze, detect and adjust variable seedbed depth in site-specific sowing systems: A case study. Agronomy 2022, 12, 1092. [Google Scholar] [CrossRef]
3. Nielsen, S.K.; Munkholm, L.J.; Lamandé, M.; Norremark, M.; Edwards, G.T.C.; Green, O. Seed drill depth control system for precision seeding. Comput. Electron. Agric. 2018, 144, 174–180. [Google Scholar] [CrossRef]
4. Studhalter, M.; Janovicek, K.; Kim, J.; Byker, H.; Mountain, N.; Nasielski, J. Row spacing, seeding depth, seeding rate, and trinexapac-ethyl effects on oat yield and lodging. Crop Sci. 2023, 63, 2509–2523. [Google Scholar] [CrossRef]
5. Kong, L.; Sun, M.; Wang, F. Effects of speeding depth on subcrown internode elongation and grain yield in wheat. Pak. J. Agric. Sci. 2016, 53, 625–632. [Google Scholar]
6. Li, H.; He, J.; Wang, C.; Yang, W.; Lin, H.; Wang, Q.; Yang, H.; Tan, L. Research Progress on the Development of the Planter Unit for Furrowing Control and the Depth Measurement Technology. Appl. Sci. 2023, 13, 11884. [Google Scholar] [CrossRef]
7. Badua, S.; Sharda, A.; Flippo, D. Sensing system for real-time measurement of seed spacing, depth, and geo-location of corn: A proof-of-concept study. Trans. ASABE 2019, 62, 1779–1788. [Google Scholar] [CrossRef]
8. Kiani, S.; Kamgar, S.; Raoufat, M. Automatic on-line depth control of seeding units using a non-contacting ultrasonic sensor. Int. J. Nat. Eng. Sci. 2010, 6, 39–42. [Google Scholar]
9. Wang, Q.; Xu, Q.; Lu, C.; Li, H.; He, J.; Wang, Q. Research status and development of key technologies for no-tillage seeding intellectualization. J. South China Agric. Univ. 2021, 42, 27–35. [Google Scholar]
10. Suomi, P.; Oksanen, T. Automatic working depth control for seed drill using ISO 11783 remote control messages. Comput. Electron. Agric. 2015, 116, 30–35. [Google Scholar] [CrossRef]
11. Bai, H.; Fang, X.; Wang, D.; Yuan, Y.; Zhou, L.; Niu, K. Design and Test of Control System for Seeding Depth and Compaction of Corn Precision Planter. Trans. Chin. Soc. Agric. Mach. 2020, 51, 61–72. [Google Scholar]
12. Nielsen, S.K.; Nørremark, M.; Green, O. Sensor and control for consistent seed drill coulter depth. Comput. Electron. Agric. 2016, 127, 690–698. [Google Scholar] [CrossRef]
13. Mapoka, K.O.M.; Birrell, S.J.; Tekeste, M. A comprehensive survey of nondestructive sensing technologies for the detection of corn seeds in a closed trench and measuring planting depth to augment the conventional method. Comput. Electron. Agric. 2019, 158, 249–257. [Google Scholar] [CrossRef]
14. Lee, J.; Yamazaki, M.; Oida, O.; Nakashima, H.; Shimizu, H. Electro-Hydraulic Tillage Depth Control System for Rotary Implements Mounted on Agricultural Tractor Design and Response Experiments of Control System. J. Terramech. 1998, 35, 229–238. [Google Scholar] [CrossRef]
15. Liu, W.; Ma, B.; Chen, X.; Yu, C.; Jing, T.; Huang, L. Design of a Single Sowing Depth Measurement System for an Air Suction Corn Planter. Eng. Agríc. 2022, 42, e20210173. [Google Scholar]
16. Wang, S.; Yi, S.; Zhao, B.; Li, Y.; Tao, G.; Mao, X. High-speed No-till Seeder Seeding Depth Monitoring System Based on IWHO-EKF. Trans. Chin. Soc. Agric. Mach. 2024, 55, 75–84. [Google Scholar]
17. Sharipov, G.M.; Paraforos, D.S.; Pulatov, A.S.; Griepentrog, H.W. Dynamic performance of a no-till seeding assembly. Biosyst. Eng. 2017, 158, 64–75. [Google Scholar] [CrossRef]
18. Zhao, J.; Zhu, L.; Jia, H.; Huang, D.; Guo, M.; Cong, Y. Automatic depth control system for a no-till seeder. Int. J. Agric. Biol. Eng. 2018, 11, 115–121. [Google Scholar] [CrossRef]
19. Morales, Y.; Tsubouchi, T.; Yuta, S. Vehicle localization in outdoor mountainous forested paths and extension of two-dimensional road centerline maps to three-dimensional maps. Adv. Robot. 2010, 24, 489–513. [Google Scholar] [CrossRef]
20. Valente, M.; Joly, C.; de La Fortelle, A. Deep sensor fusion for real-time odometry estimation. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 6679–6685. [Google Scholar]
21. Liu, L.; Wang, X.; Zhang, X.; Cheng, X.; Wei, Z.; Ji, J.; Li, H.; Zhang, H.; Wang, M. Sowing depth control strategy based on the downforce measurement and control system of ‘t’-shaped furrow opener. Biosyst. Eng. 2024, 247, 97–108. [Google Scholar] [CrossRef]
22. Kang, J.; Wang, N.; Jiang, H.; Xu, P.; Jia, M.; Shao, L. Experimental research on cotton seed depth detection system based on magnetic field. J. Hebei Agric. Univ. 2021, 2021, 104–110. [Google Scholar]
23. Sang, X.; Zhang, K.; Yang, L.; Zhang, D.; Cui, T.; He, X.; Qi, H.; Mou, J. Design and experiment of a stereoscopic vision-based system for seeding depth consistency adjustment. Comput. Electron. Agric. 2024, 225, 109345. [Google Scholar] [CrossRef]
24. Liu, S.; Tang, Z.; Shen, C.; Wang, T.; Liang, Y. Effect of rice stubble on soil compaction properties of a crawler undergoing combine harvester harvesting. Eng. Agríc. 2023, 43, e20230057. [Google Scholar] [CrossRef]
25. Yang, Q.; Shi, L.; Shi, A.; He, M.; Zhao, X.; Zhang, L.; Addy, M. Determination of key soil characteristic parameters using angle of repose and direct shear stress test. Int. J. Agric. Biol. Eng. 2023, 16, 143–150. [Google Scholar] [CrossRef]
26. Kwon, S.K.; Son, S.H.; Hyun, E.; Lee, J.H.; Lee, J. Radar-lidar sensor fusion sheme using occluded depth generation for pedestrian detection. In Proceedings of the 2017 International Conference on Computational Science and Computational Intelligence (CSCI), Las Vegas, NV, USA, 14–16 December 2017; pp. 1811–1812. [Google Scholar]
27. Liu, H.; Zhu, H. Evaluation of a laser scanning sensor in detection of complex-shaped targets for variable-rate sprayer development. Trans. ASABE 2016, 59, 1181–1192. [Google Scholar]
28. Guo, X.; Wang, S.; Chen, S.; Li, B.; Tang, Z.; Hu, Y. Impact of Structural Parameters on the Collision Characteristics and Coefficient of Restitution of Soybean Particles on Harvester’s Cleaning Screens. Agriculture 2024, 14, 1201. [Google Scholar] [CrossRef]
29. Song, Z.; Du, C.; Chen, Y.; Han, D.; Wang, X. Development and test of a spring-finger roller-type hot pepper picking header. J. Agric. Eng. 2024, 55. [Google Scholar] [CrossRef]
30. Ahmadi, E.; Ghassemzadeh, H.R.; Moghaddam, M.; Kim, K.U. Development of a precision seed drill for oilseed rape. Turk. J. Agric. For. 2008, 32, 451–458. [Google Scholar]
31. Ahmad, F.; Adeel, M.; Qiu, B.; Ma, J.; Shoaib, M.; Shakoor, A.; Chandio, F.A. Sowing uniformity of bed-type pneumatic maize planter at various seedbed preparation levels and machine travel speeds. Int. J. Agric. Biol. Eng. 2021, 14, 165–171. [Google Scholar] [CrossRef]
32. Hu, J.; Zhao, X.; Liu, W.; Yao, M.; Zhao, J. Development of a seeding control method based on seed height in the hopper of a precision wheat drill. Appl. Eng. Agric. 2021, 37, 1131–1138. [Google Scholar] [CrossRef]
33. Man, Y.; Ma, Y.; Zhao, Y.; Xu, C.; Hao, W. Research on a Novel Two-Phase Hybrid Stepping Motor. Appl. Mech. Mater. 2012, 121, 4122–4126. [Google Scholar] [CrossRef]
34. Golubovic, E.; Zhakypov, Z.; Uzunovic, T.; Sabanovic, A. Piezoelectric motor driver: Design and evaluation. In Proceedings of the IECON 2013-39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 3964–3969. [Google Scholar]
35. Liang, Z.; Li, Y.; Xu, L.; Zhao, Z.; Tang, Z. Optimum design of an array structure for the grain loss sensor to upgrade its resolution for harvesting rice in a combine harvester. Biosyst. Eng. 2017, 157, 24–34. [Google Scholar] [CrossRef]
36. Liang, Z.; Li, Y.; Xu, L.; Zhao, Z. Sensor for monitoring rice grain sieve losses in combine harvesters. Biosyst. Eng. 2016, 147, 51–66. [Google Scholar] [CrossRef]
37. Wen, S.; Li, S.; Hao, C. Approximately optimal distribution of depth sensors over towed array. IET Signal Process. 2018, 12, 770–776. [Google Scholar]
38. Sun, Y.; Luo, Y.; Zhang, Q.; Xu, L.; Wang, L.; Zhang, P. Estimation of crop height distribution for mature rice based on a moving surface and 3D point cloud elevation. Agronomy 2022, 12, 836. [Google Scholar] [CrossRef]
39. Ba, R.; Xin, K.; Liu, T. A Waveform Matching Based Data-Processing Method for TOF Ranging. In Proceedings of the 2016 IEEE 84th Vehicular Technology Conference (VTC-Fall), Montreal, QC, USA, 18–21 September 2016; pp. 1–5. [Google Scholar]
40. Suh, Y.S. Laser sensors for displacement, distance and position. Sensors 2019, 19, 1924. [Google Scholar] [CrossRef]
41. Fang, H.; Niu, M.; Zhu, Z.; Zhang, Q. Experimental and numerical investigations of the impacts of separating board and anti-blocking mechanism on maize seeding. J. Agric. Eng. 2022, 53. [Google Scholar]
42. Xie, J.; Gao, H.; Ye, X.; Gu, F.; Li, D. Application of laser sensors for on-line calibration of displacement transducers. In Proceedings of the Sixth International Symposium on Precision Engineering Measurements and Instrumentation, Hangzhou, China, 8–10 August 2010; Volume 7544, pp. 1508–1515. [Google Scholar]
43. Deepa, P.; Thilagavathi, K. Data reduction techniques of hyperspectral images: A comparative study. In Proceedings of the 2015 3rd International Conference on Signal Processing, Communication and Networking (ICSCN), Chennai, India, 26–28 March 2015; pp. 1–6. [Google Scholar]
Li Y, Qi B, Bao E, Tang Z, Lian Y, Sun M. Design and Analysis of Sowing Depth Detection and Control Device for Multi-Row Wheat Seeders Adapted to Different Terrain Variations. Agriculture. 2025; 15(3):290. https://doi.org/10.3390/agriculture15030290
Перевод статьи «Design and Analysis of Sowing Depth Detection and Control Device for Multi-Row Wheat Seeders Adapted to Different Terrain Variations» авторов Li Y, Qi B, Bao E, Tang Z, Lian Y, Sun M., оригинал доступен по ссылке. Лицензия: CC BY. Изменения: переведено на русский язык



















































































































Комментарии (0)