Дроны против сорняков на рисовых полях: малый объём распыления — высокая эффективность
Беспилотные летательные аппараты (БПЛА) представляют собой передовую технологию, которая обещает произвести революцию в традиционных задачах сельского хозяйства. В глобальном масштабе БПЛА набирают популярность для внесения пестицидов, особенно с акцентом на использование малых объёмов распыления. Тем не менее, в исследованиях сохраняется заметный пробел в отношении влияния малых объёмов распыления на эффективность гербицидов. В связи с этим в 2022 году были проведены полевые исследования в нескольких местах: на Сельскохозяйственной опытной станции в Бхаванисагаре и на Опытной станции водно-болотных угодий в Коимбаторе, штат Тамилнад, Индия. Целью исследования была оценка влияния различных объёмов распыления с использованием БПЛА и ранцевого ручного опрыскивателя (РРО) на осаждение капель, плотность капель и эффективность борьбы с сорняками.
Аннотация
Варианты обработки включали распыление с БПЛА при объёмах 30 и 45 л/га, а также РРО при 500 л/га, с контрольным вариантом (засорённый участок без обработки). Гербицид биспирибак-натрий, 10% SC, вносился в дозе 35 г д.в./га на стадии 2–3 листьев культуры.
Результаты показали, что на осаждение капель, площадь покрытия и срединный объёмный диаметр капель влиял тип опрыскивателя (БПЛА и РРО). Однако два испытанных объёма распыления при использовании метода БПЛА обеспечили схожие параметры капель. Система РРО при 500 л/га показала наибольшее осаждение капель, в то время как система БПЛА достигла лучшего распределения капель при объёме распыления 30 л/га. Примечательно, что система БПЛА при 30 л/га продемонстрировала эффективную борьбу с сорняками, которая была статистически сравнима с системой РРО при 500 л/га.
Эти результаты подчёркивают, что система опрыскивания с БПЛА при объёме распыления 30 л/га обеспечивает эффективную борьбу с сорняками, используя при этом меньший объём жидкости-носителя по сравнению с ручным ранцевым опрыскиванием. Таким образом, система опрыскивания с БПЛА обладает большим потенциалом как жизнеспособная альтернатива ручному ранцевому опрыскиванию для внесения гербицидов в посевах риса прямого сева.
1 Введение
Рис является одним из основных источников пищи для более чем 50% населения земного шара и обеспечивает более 20% калорий в рационе (Fukagawa и Ziska, 2019). В Индии рис — одна из важнейших продовольственных культур, производящая 129,5 млн метрических тонн с посевной площади 46,3 млн га при средней урожайности 2,79 т га⁻¹ (Indiastat, 2023). Прогнозируется, что спрос на рис в Индии вырастет на 26 млн тонн в период между 2020 и 2030 годами Anno Domini (AD) (Mondal и др., 2022).
Традиционное производство риса при рассадной технологии сталкивается с рядом проблем, включая нехватку квалифицированной рабочей силы, снижение доступности орошения и увеличение числа суровых погодных условий (Bhushan и др., 2007; Kumar и др., 2021). Рисоводство при рассадной технологии связано с более высокими производственными затратами, повышенным энергопотреблением, большими потерями питательных веществ, выбросами парниковых газов, деградацией структуры почвы и длительным вегетационным периодом (Farooq и др., 2011a; Chauhan и др., 2012; Chaudhary и др., 2022). Эти факторы в совокупности задерживают посев последующих непоривных культур в системе севооборота (Kumar и Ladha, 2011). Следовательно, наблюдается растущая тенденция к внедрению риса прямого сева (DSR) как жизнеспособной альтернативы для решения этих проблем. DSR экономит 33% оросительной воды и снижает затраты труда на посадку на 97% по сравнению с рассадным рисом (Haindavi и др., 2018).
Несмотря на многочисленные преимущества, DSR более восприимчив к засорению сорняками по сравнению с рассадным рисом из-за отсутствия слоя воды в поле (Farooq и др., 2011b). Кроме того, флора сорняков в DSR более разнообразна по сравнению с рассадным рисом (Tomita и др., 2003). Среди различных факторов, влияющих на продуктивность DSR, сорняки играют ключевую роль. Исследования сообщают о потерях урожая до 90% при отсутствии эффективных мер борьбы с сорняками в DSR (Chauhan и Johnson, 2011). Таким образом, своевременная и эффективная борьба с сорняками необходима для повышения продуктивности DSR. Критический период конкуренции культуры и сорняков в DSR наступает между 15 и 45 днями после посева (DAS) (Singh и др., 1999). Однако в пик сезона недоступность квалифицированной рабочей силы для ручной прополки приводит к задержке полевых работ. Эти задержки имеют серьезные последствия, включая значительные потери урожая риса. Кроме того, для обеспечения своевременного выполнения полевых работ фермеры вынуждены платить более высокую заработную плату, что создает для них экономическое бремя. Следовательно, использование гербицидов становится наиболее эффективным и экономически viable вариантом для борьбы с сорняками в DSR по сравнению с другими доступными альтернативами (Dass и др., 2017).
Традиционно гербициды вносятся с помощью ручных или аккумуляторных ранцевых опрыскивателей (Li и др., 2017). Эти опрыскиватели часто приводят к неравномерному внесению, увеличению затрат на внесение, тяжелому физическому труду, трудностям при передвижении по влажной почве с грузом и неравномерному состоянию посевов из-за глубокого вдавливания семян во влажную почву в зонах следа опрыскивающего (Vijayakumar и др., 2022). Кроме того, эти методы представляют более высокий риск воздействия токсичных химикатов на персонал, распыляющий гербициды, по сравнению с внесением гербицидов с использованием беспилотных летательных аппаратов (БПЛА) (Cao и др., 2017; Meivel и др., 2016).
Беспилотный летательный аппарат (БПЛА) — это многофункциональное устройство, которое используется для многих сельскохозяйственных применений, таких как анализ почвы, посев, отпугивание птиц, распыление пестицидов, мониторинг качества грунтовых вод и системы земледелия (Ahirwar и др., 2019; Rejeb и др., 2022). В глобальном масштабе интерес к технологии БПЛА для сельскохозяйственных операций возрос (Telli и др., 2023). Применение БПЛА для защиты растений может быть полезным в системах земледелия, где наземное внесение затруднено, например, на влажных полях и плантационных культурах (Arthanari и Paul, 2022). Поэтому использование БПЛА для распыления пестицидов становится все более популярным в области сельского хозяйства (Wen и др., 2018; Meng и др., 2020; Vijayakumar и др., 2020).
Эффективность пестицидов, вносимых с помощью БПЛА, значительно зависит от таких факторов, как объем распыления, размер капель и норма осаждения, на которые, в свою очередь, влияют погодные параметры, включая скорость и направление ветра (Fritz, 2006; Legleiter и Johnson, 2016). Для достижения improved эффективности борьбы с послевсходовыми гербицидами необходимо увеличить контакт с целевыми сорняками. Ferguson и др. (2018) сообщили, что уменьшение размера капель распыления влияет на эффективность контактных гербицидов (амитрол и паракват), но не системных (имазапир, глифосат и клодинафоп). Chen и др. (2019) использовали два объема жидкости-носителя (15 и 22,5 л га⁻¹) для внесения системного гербицида с БПЛА и обнаружили, что уменьшенный объем носителя не повлиял на эффективность борьбы с сорняками. Согласно Jeevan и др. (2023a), осаждение капель и покрытие увеличились при увеличении объема распыления с 25 до 50 л га⁻¹; однако, большая эффективность борьбы с сорняками для биспирибака-натрия в дозе 25 г д.в. га⁻¹ была достигнута при объеме более 37,5 л га⁻¹.
Qin и др. (2016) изучали влияние высоты полета (0,8 и 1,5 м) и скорости (3 и 5 м с⁻¹) на равномерность осаждения и обнаружили, что внесение пестицидов с высотой полета 1,5 м и скоростью 5 м с⁻¹ показало большую равномерность капель, чем conventional опрыскиватель на рисе. Плотность капель и покрытие увеличивались с увеличением расхода жидкости при constant высоте полета (2 м); однако, плотность капель снижалась с увеличением высоты полета и скорости при constant расходе жидкости (1,08 л мин⁻¹) (Wang и др., 2017).
БПЛА могут летать и зависать близко к пологу растений для безопасного внесения гербицидов. Ahmad и др. (2020) сообщили, что операционные параметры БПЛА — высота полета 2 м и скорость полета 2 м с⁻¹ — обеспечили наибольшее среднее осаждение гербицида на пологе сорняков. Paul и др. (2023a) провели эксперимент по оценке эффективности гербицидов на рисе и обнаружили, что нет существенной разницы в эффективности гербицидов между обработками с использованием БПЛА и ранцевого опрыскивателя. Аналогично, Pranaswi и др. (2024) обнаружили, что эффективность системных гербицидов на пшенице осталась незатронутой при внесении БПЛА и ранцевым опрыскивателем. Jeevan и др. (2023b) также сообщили, что внесение гербицидов с помощью БПЛА привело к значительному снижению плотности сорняков и сухой массы сорняков на рассадном рисе, что было сравнимо с conventional методами внесения. Внесение послевсходовых системных гербицидов, таких как ринскор, цигалофоп и биспирибак-натрий, через БПЛА дало аналогичную эффективность гербицидов и борьбу с сорняками, как и conventional опрыскиватель на рисе (Abd Ghani и др., 2024). Несколько исследователей сообщили, что БПЛА могут осуществлять site-specific внесение гербицидов, что может снизить количество используемого гербицида. Например, внедрение site-specific внесения гербицидов с помощью БПЛА при умеренных зарослях сорняков с гнездовым распределением сократило использование гербицидов на 90% на кукурузе и на 43% на сахарной свекле (Mink и др., 2018). Следовательно, внедрение БПЛА может быть альтернативой conventional системам.
Борьба со взошедшими сорняками в DSR удобна при внесении гербицидов на основе БПЛА (Paul и др., 2023b). Однако неясно, влияет ли внесение гербицидов с помощью БПЛА на показатели борьбы с сорняками при экономии объема носителя в системе DSR. Решение этих пробелов в знаниях необходимо для разработки стандартизированных практик распыления гербицидов в DSR. Конкретные цели этого исследования состояли в том, чтобы (i) сравнить эффективность внесения гербицидов на основе БПЛА (гексакоптера) с системой KMS и (ii) эффективный объем распыления для внесения гербицидов через БПЛА, aiming достичь максимальной эффективности борьбы с сорняками.
2 Материалы и методы
2.1 Экспериментальный участок
Полевые эксперименты были проведены на Южном участке Сельскохозяйственной опытной станции в Бхаванисагаре (11°29′ с.ш., 77°08′ в.д.) (исследование 1) и на Опытной станции водно-болотных угодий в Коимбаторе (11°54′ с.ш., 76°56′ в.д.) (исследование 2), Сельскохозяйственный университет Тамилнада, Коимбатор, Индия. Описание почвенных и погодных параметров для экспериментальных участков предоставлено в Таблицах 1, 2.
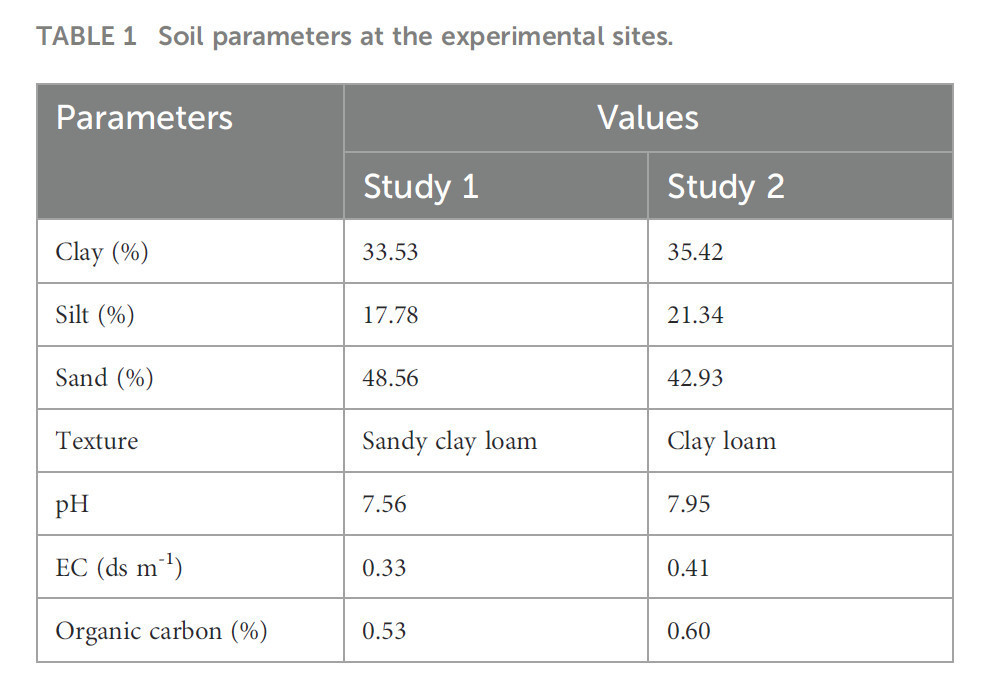
Таблица 1 Параметры почвы на экспериментальных участках.
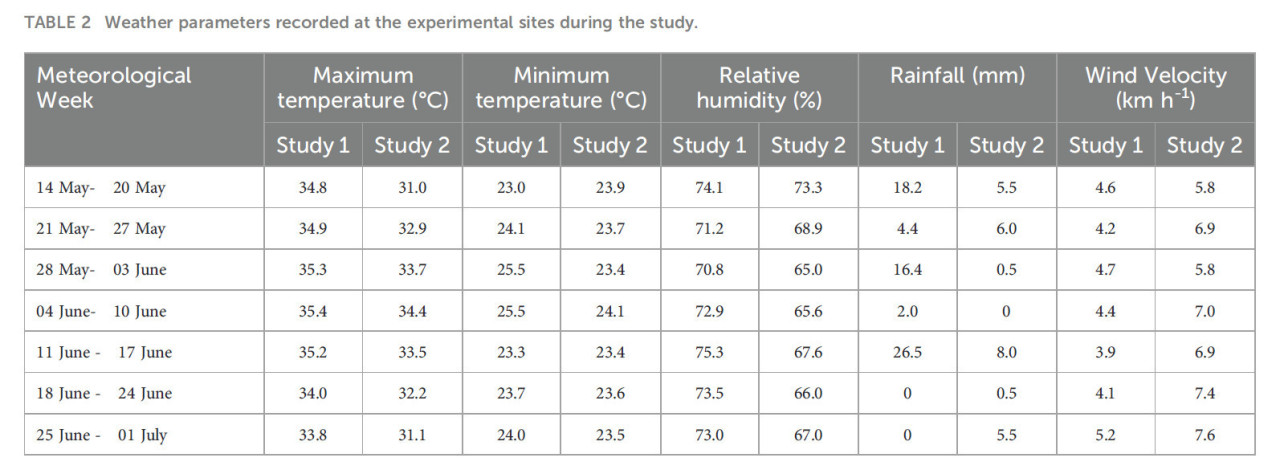
Таблица 2 Погодные параметры, зарегистрированные на экспериментальных участках во время исследования.
2.2 Агротехника
Экспериментальное поле было вспахано с помощью тракторной дисковой бороны, за которой последовало взмучивание с помощью тракторного каткового колеса. Взмученное поле затем было выровнено с помощью деревянного бруса. Сорт риса, использованный для эксперимента, — ADT 43. Семена риса замачивали в воде в течение 10 часов с последующей инкубацией в темноте в течение 24 часов для стимуляции прорастания семян. Проросшие семена высевали на взмученную почву с помощью полосовой сеялки с междурядьем 0,2 м. Семена были посеяны 19 мая 2022 года (исследование 1) и 23 мая 2022 года (исследование 2), норма высева составляла 60 кг га⁻¹. Вода была отведена с поля через один день после посева на срок до одной недели, чтобы стимулировать раннее и равномерное прорастание. После появления всходов уровень воды поддерживали на уровне 5 см. Рекомендованная доза удобрения, состоящая из 150:50:50 кг га⁻¹ азота, фосфора и калия, была внесена в виде мочевины, простого суперфосфата и калийной соли. До посева 100% фосфора и по 25% азота и калия были внесены в качестве основного удобрения, тогда как остальные 75% азота и калия были внесены тремя равными подкормками в 21 DAS, в фазу начала выметывания метелки и цветения.
2.3 Оборудование
Для исследования был использован гексакоптерный БПЛА (Kisan drone V.2, Garuda Aerospace Pvt Ltd, Ченнаи, Индия), оснащенный различными компонентами для распыления (Рисунок 1А). Опрыскиватель БПЛА был оснащен бесколлекторными электродвигателями (BLDC) мощностью 180 кВ, складным пропеллером 0,57 м, двумя литиево-полимерными аккумуляторами, контроллером полета, приемником, GPS-устройством и баком для пестицидов емкостью 10 л и четырьмя форсунками с шагом 0,70 м. Для создания давления распыляемой жидкости использовался насос бесколлекторного электродвигателя (BLDC) с давлением 3,4 кг см⁻². Планировщик полета использовался для управления высотой и скоростью полета, в то время как расход опрыскивателя БПЛА регулировался для достижения желаемого рабочего расхода в диапазоне от 100% до 75%. Перед полетом была проведена предполетная калибровка системы распыления БПЛА. Напротив, аккумуляторный ранцевый ручной опрыскиватель, использованный в исследовании, состоял из бака объемом 16 л для раствора, насоса, фильтра, регулятора расхода, напорного шланга и распылительной насадки с форсункой под давлением 2,1 кг см⁻². Детальная информация о различных компонентах обоих опрыскивателей — ручного ранцевого (KMS) (KK-BBS-199, KisanKraft Limited, Индия, показан на Рисунке 1B) и системы распыления БПЛА —provided в Таблице 3.

Рисунок 1 Различные опрыскиватели, использованные в исследовании: (A) Опрыскиватель на базе гексакоптерного БПЛА, (B) Ручной ранцевый опрыскиватель.
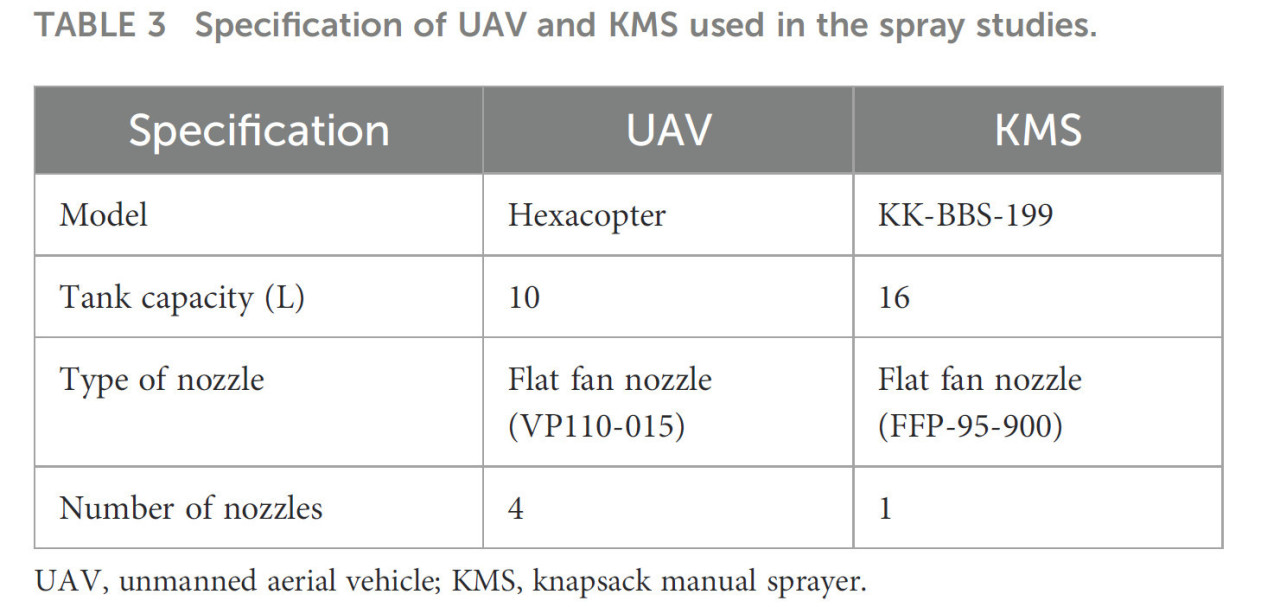
Таблица 3 Технические характеристики БПЛА и KMS, использованных в исследованиях распыления.
2.4 Норма внесения
Норма внесения была определена в соответствии со стандартом Американского общества сельскохозяйственных и биологических инженеров (ASABE) (S386.2, 2018). Значения скорости движения, эффективной ширины распыления и расхода были измерены, и норма внесения была рассчитана с помощью следующего уравнения:

Где,
R = Норма внесения, л га⁻¹
Q = Расход, л мин⁻¹
K = Константа, 600
S = Скорость движения, км ч⁻¹
W = Эффективная ширина распыления, м
2.5 Внесение гербицида
Системный ранний послевсходовый гербицид биспирибак-натрий (Nominee Gold, 10% SC, PI Industries Limited, Удайпур, Индия) был внесен в дозе 35 г д.в. га⁻¹. Гербицид вносили в качестве ранней послевсходовой обработки на стадии 2–3 листьев растения риса с использованием как KMS, так и БПЛА (Рисунок 2А). Обработки включали распыление с БПЛА с нормой 30 и 45 л га⁻¹, а также KMS с нормой 500 л га⁻¹, с контрольным вариантом (засоренный участок без обработки). Для размещения экспериментальных единиц была использована рандомизированная полная блочная конструкция с размером делянки 40 × 16 м и тремя повторениями для каждой обработки. Операционные параметры для БПЛА и KMS представлены в Таблице 4. Во время внесения гербицида различные метеорологические параметры, такие как температура, относительная влажность и количество осадков, были получены с метеорологической обсерватории (Таблица 5). Портативный ручной анемометр (LUTRON AM 4202, крыльчатого типа, диапазон: от 0,4 до 30,0 м с⁻¹) использовался для измерения непрерывной скорости ветра во время внесения гербицида (Yang и др., 2018).
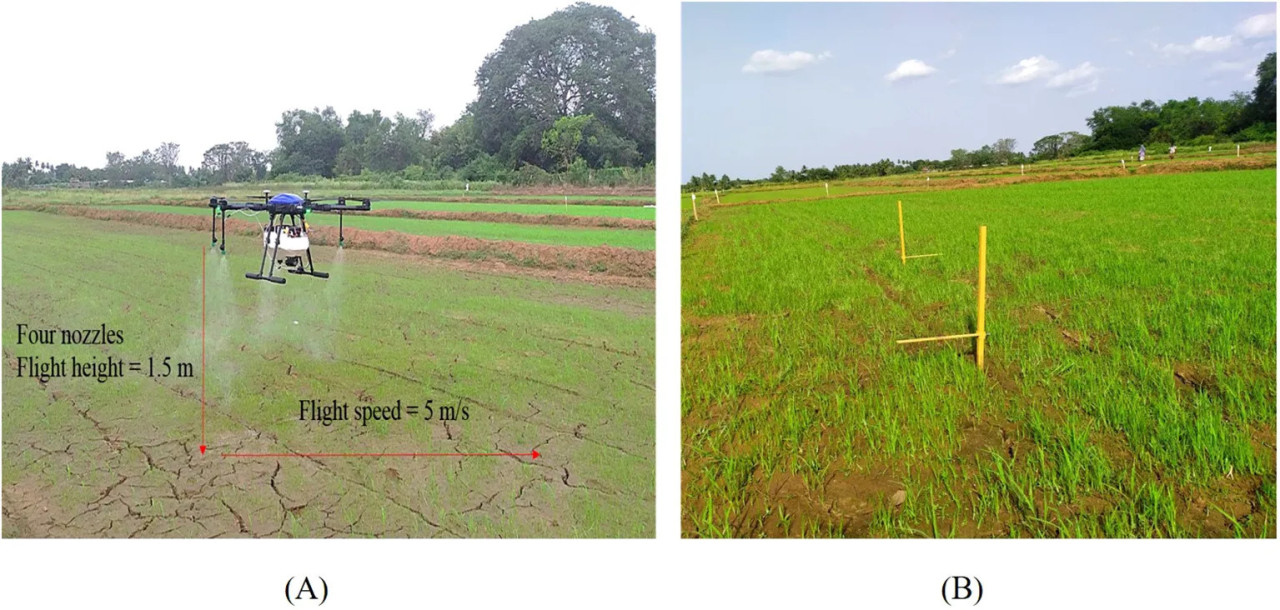
Рисунок 2 Распыление: (A) Операция распыления гербицида с БПЛА, (B) Размещение водочувствительной бумаги (WSP) на металлических стойках в экспериментальном поле.
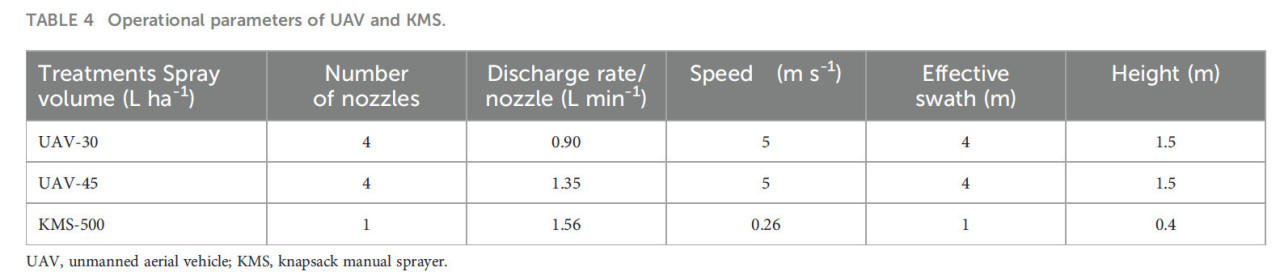
Таблица 4 Операционные параметры БПЛА и KMS.
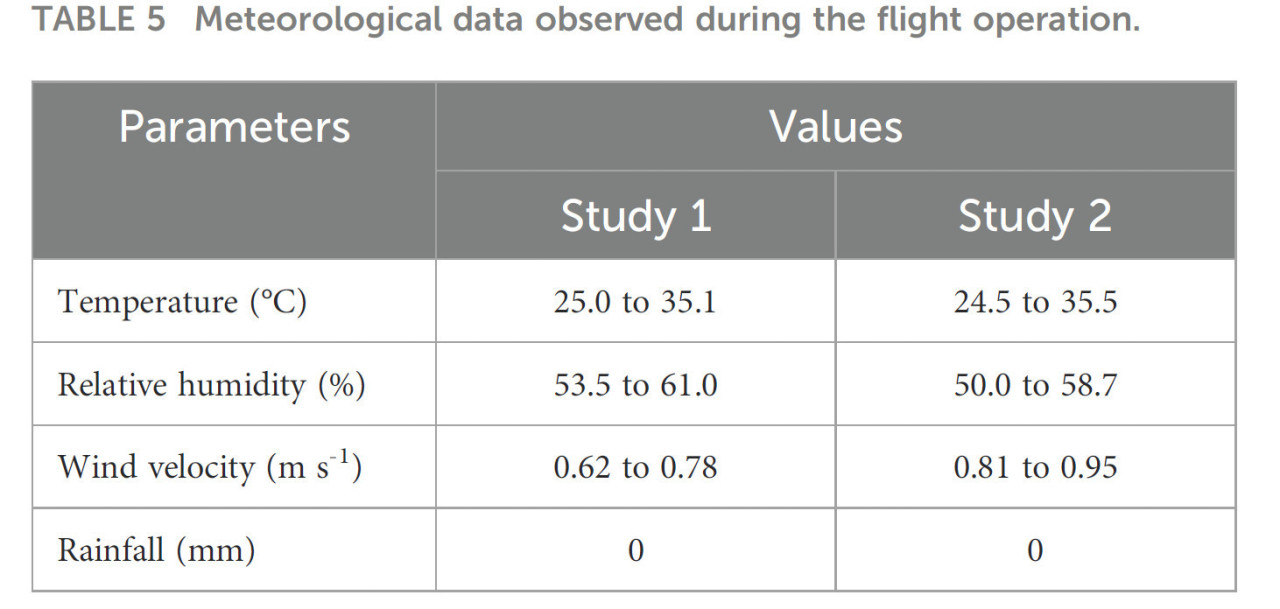
Таблица 5 Метеорологические данные, наблюдаемые во время полетной операции.
2.6 Отбор проб для оценки осаждения распыления
Водочувствительная бумага (WSP) размером 2,6 см × 7,6 см (Spray Check, SC-20301, США) была прикреплена к металлической платформе (0,04 м × 0,30 м), чтобы обеспечить ее сохранение плоской во время эксперимента (Рисунок 2B), и размещена над пологом культуры в пределах 2 см. Всего восемь пробоотборников были случайным образом размещены в пределах экспериментальных делянок. Первый пробоотборник был установлен на расстоянии 4 м от граничного ряда. Последующие пробоотборники были размещены случайным образом в разных линиях в пределах ряда (Рисунок 3), и пробоотборники собирались и заменялись между полетами.
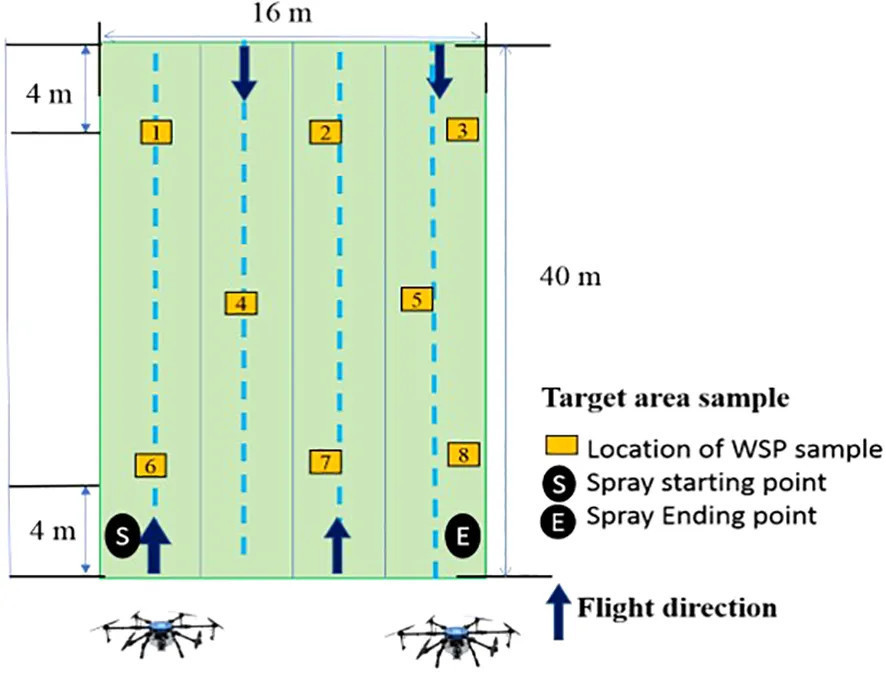
Рисунок 3 Схематическое представление расположения карточек водочувствительной бумаги (WSP) во время распыления.
После внесения гербицида WSP оставляли полностью высохнуть. После высыхания их осторожно помещали в zip-пакеты и транспортировали в лабораторию. После этого для измерения диаметра капель, плотности капель и площади покрытия на WSP использовалось программное обеспечение DropletScan (USDA, Вустер, Огайо, США) (Whitney и Gardisser, 2003).
2.7 Распределение капель
Для характеристики распределения капель между различными точками сбора был вычислен коэффициент вариации (CV) осаждения капель в каждой точке сбора. Меньшие значения CV приводят к более uniform распределению капель и лучшей эффективности (Zhang и др., 2020).
2.8 Биометрические наблюдения за сорняками
Плотность сорняков (количество сорняков м⁻²) и сухая масса сорняков (г м⁻²) регистрировались на каждой экспериментальной делянке в 40 DAS. Плотность сорняков наблюдали в четырех квадратах (0,5 × 0,5 м), размещенных на каждой делянке. Для определения сухой массы сорняков сорняки удаляли на уровне земли и сушили в тени в течение шести дней. После этого их высушивали в печи при температуре 78 ± 2°C до достижения constant веса (Jabran и др., 2012). Эффективность борьбы с сорняками (WCE) рассчитывали в соответствии с процедурами, предложенными Mani и др. (1973), и выражали в процентах.

2.9 Статистический анализ
Из-за высокой изменчивости, наблюдаемой в данных, зарегистрированных с WSP для осаждения распыления, плотности капель и площади покрытия, были применены преобразования для стабилизации широкой вариации и соблюдения предположения о нормальности. Переменная refers к признакам, количественным или качественным, которые варьируются между наблюдениями в пределах одной обработки. Данные, выраженные в процентах площади покрытия, были подвергнуты арксинус-преобразованию (arcsin√x/100). Другие параметры, полученные из данных WSP, были преобразованы с использованием логарифмического преобразования log(x+1). Кроме того, данные по плотности сорняков и сухой массе сорняков были преобразованы с использованием преобразования квадратного корня (√x+0,5) для стабилизации широкой вариации и соблюдения предположений о нормальности. Преобразованные данные использовались для выполнения теста на нормальность Шапиро-Уилка и теста Бартлетта для анализа однородности дисперсии. Затем данные были проанализированы с помощью однофакторного дисперсионного анализа (ANOVA), и множественные сравнения были выполнены с использованием критерия Тьюки Honest significant difference test при 5%-ном уровне значимости с использованием программного обеспечения IBM SPSS statistics version 26.0 (Steel и др., 1997).
3 Результаты
3.1 Спектры капель распыления на WSP
3.1.1 Срединный объемный диаметр (VMD)
Срединный объемный диаметр (VMD) увеличивался с объемом распыления в обработках БПЛА (Таблица 6). VMD капель был significantly выше (613,6 ± 27,39 мкм и 601,9 ± 29,35 мкм для исследования 1 и исследования 2 соответственно) для KMS по сравнению с обработками БПЛА (p=0,000), которые работали при low давлении (2,1 кг см⁻²) (Таблица 6). Среди обработок БПЛА VMD увеличивался с tested объемами распыления 30 и 45 л га⁻¹. Однако не было существенной разницы в VMD между обработками БПЛА (p>0,05), что указывает на то, что объем носителя оказывал minimal влияние на VMD при использовании одной и той же системы распыления.
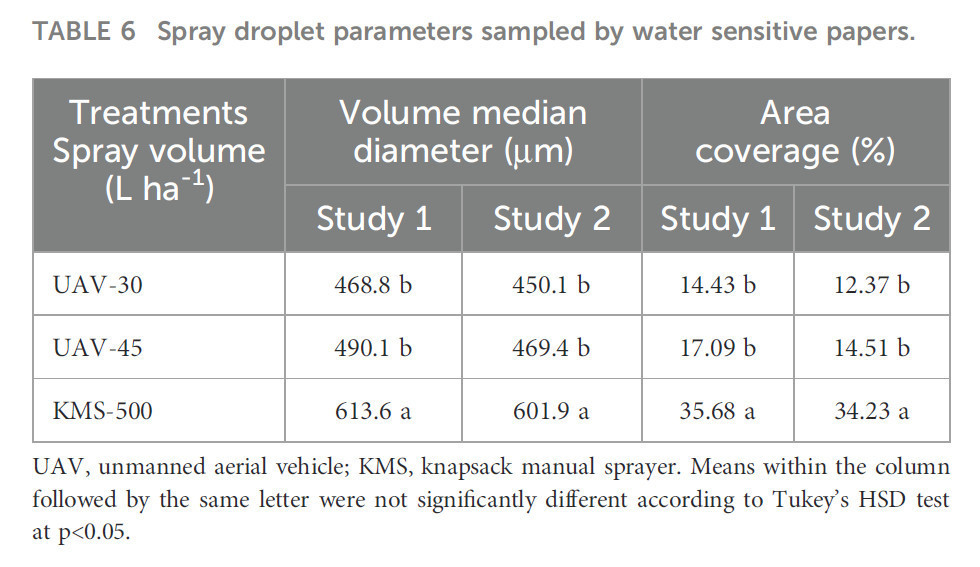
Таблица 6 Параметры капель распыления, отобранных с помощью водочувствительной бумаги.
БПЛА, беспилотный летательный аппарат; KMS, ранцевый ручной опрыскиватель. Средние значения в пределах столбца, за которыми следует одна и та же буква, не являются significantly различными согласно критерию Тьюки HSD при p<0,05.
3.1.2 Площадь покрытия
Процент площади покрытия распылением является важным параметром для оценки осаждения капель и эффективности опрыскивателя. Различные объемы распыления повлияли на процент площади покрытия на WSP (Таблица 6). В обоих исследованиях самая высокая площадь покрытия на WSP была зарегистрирована при обработке KMS с 500 л га⁻¹, что было significantly выше, чем в обработках БПЛА (p=0,000), и самые высокие значения площади покрытия на WSP были зарегистрированы в исследовании 1 (35,68%) по сравнению с исследованием 2 (34,23%). Не было существенной разницы в площади покрытия распылением между обработками БПЛА с tested объемом распыления 30 и 45 л га⁻¹ (p>0,05).
3.1.3 Плотность капель
Самая высокая плотность капель распыления на единицу площади была зарегистрирована при обработке KMS с 500 л га⁻¹. Не было существенной разницы в плотности капель между обработками БПЛА. На пробоотборниках WSP средняя плотность капель распыления (Рисунок 4) составила 35,1 ± 2,58, 38,6 ± 4,50 и 45,4 ± 8,70 капель см⁻² в исследовании 1 и 30,9 ± 4,12, 34,1 ± 5,63 и 44,3 ± 7,83 капель см⁻² в исследовании 2 для БПЛА при 30, 45 л га⁻¹ и обработок KMS соответственно (Рисунок 5).
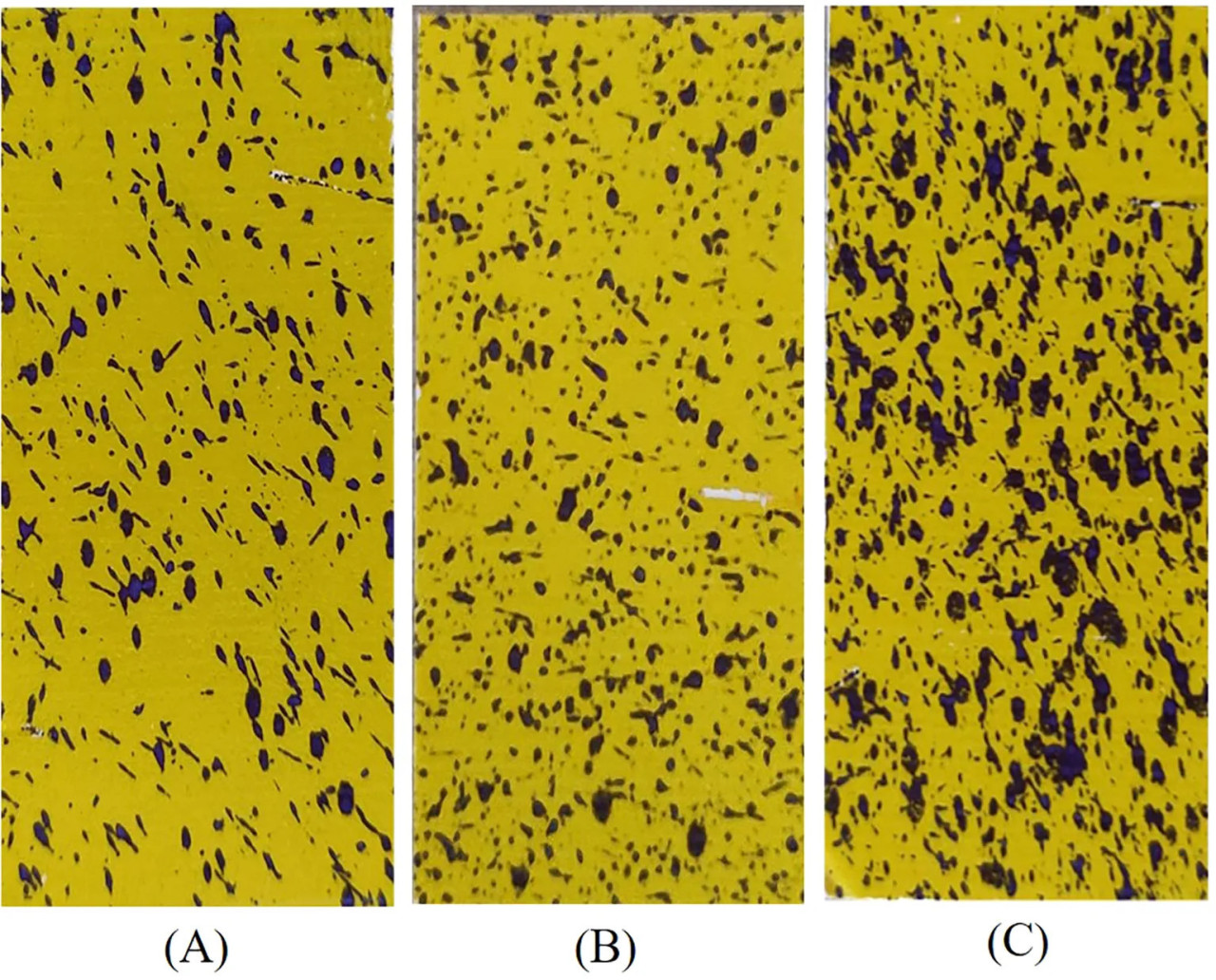
Рисунок 4 Иллюстрация капель распыления на водочувствительной бумаге: (A) БПЛА-30 л га⁻¹, (B) БПЛА-45 л га⁻¹, (C) KMS-500 л га⁻¹.
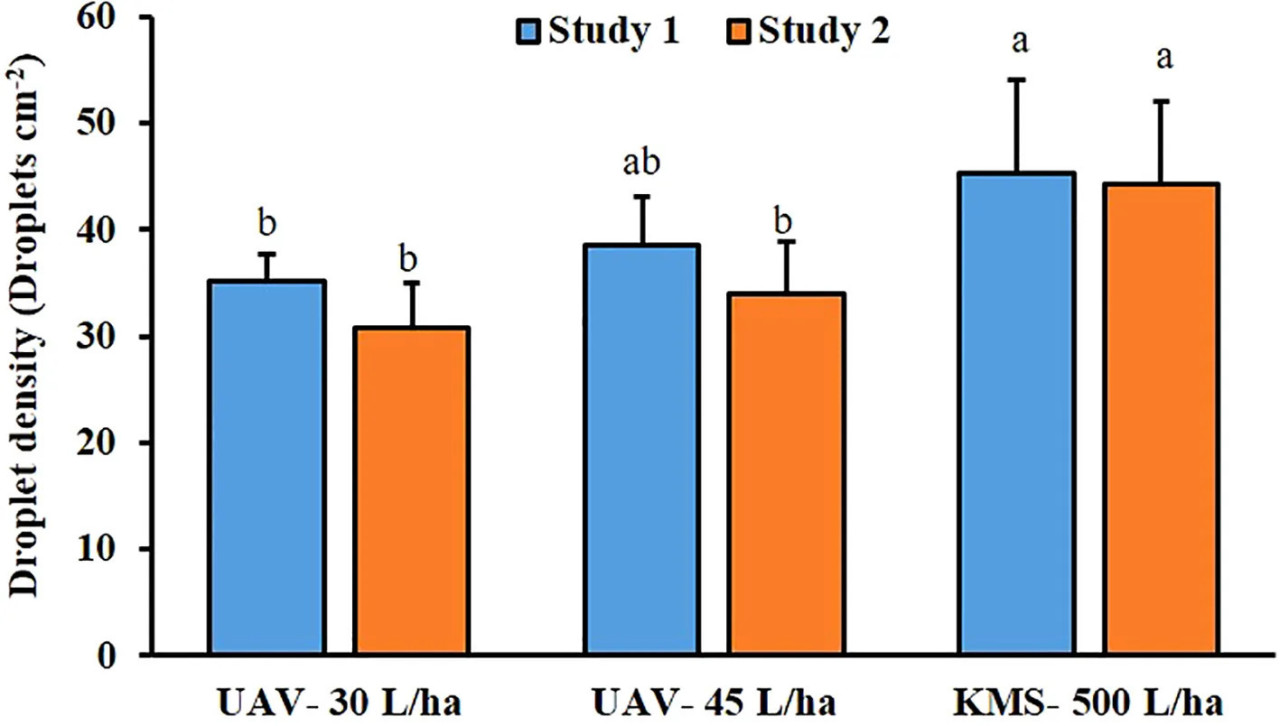
Рисунок 5 Плотность капель на WSP в зависимости от опрыскивателя и объема. Обработки, отмеченные одинаковой буквой, не являются significantly различными согласно критерию Тьюки HSD (p>0,05).
3.1.4 Распределение капель
Распределение капель распыления — еще один важный параметр для оценки эффективности распыления. Меньший CV указывает на uniform распределение капель. Результаты показывают, что обработки БПЛА продемонстрировали более низкие значения CV по сравнению с обработкой KMS, что указывает на лучшее распределение распыления по экспериментальным делянкам. Равномерность распределения капель на WSP для БПЛА при 30, 45 л га⁻¹ и KMS при 500 л га⁻¹ составила 8,64%, 17,21% и 21,23% в исследовании 1 и 11,76%, 19,21% и 19,68% в исследовании 2 соответственно (Рисунок 6).
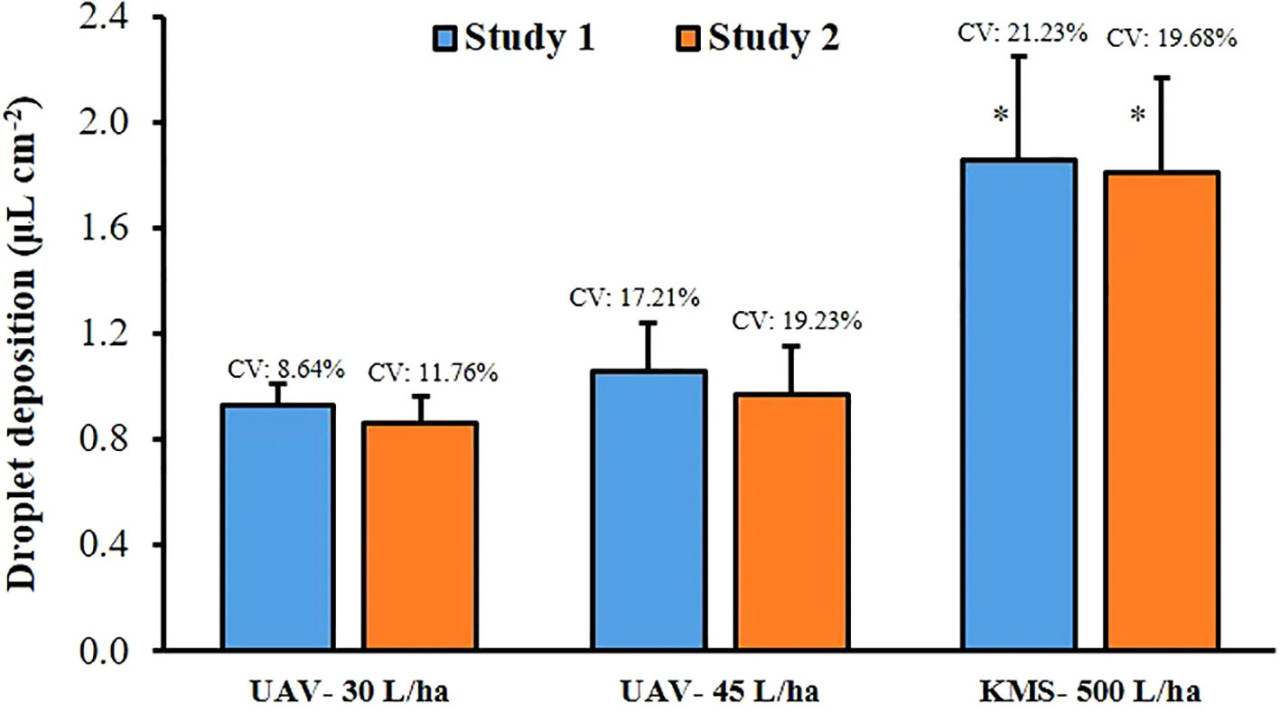
Рисунок 6 Осаждение капель и коэффициент вариации на WSP для двух опрыскивателей при трех объемах распыления. Звездочки показывают, что обработка significantly отличается от других обработок с p value <0,05 по критерию Тьюки HSD.
3.1.5 Осаждение капель
Tested объемы распыления оказали значительное влияние на осаждение капель (Рисунок 6). Наибольшее осаждение было зарегистрировано при обработке KMS с объемом распыления 500 л га⁻¹ (1,86 ± 0,39 мкл см⁻² и 1,81 ± 0,35 мкл см⁻² для исследования 1 и исследования 2 соответственно), и оно significantly отличалось от обработок БПЛА (p=0,000).
3.2 Эффективность борьбы с сорняками
Основная флора сорняков, обнаруженная на экспериментальных полях, включала Leptochloa chinensis, Echinochloa colona, Cyperus difformis, Cyperus iria, Marsilea quadrifolia, Bergia capensis и Ludwigia parviflora. Кроме того, Sphenoclea zeylanica и Monochoria vaginalis также наблюдались на экспериментальной делянке исследования 1. Внесение гербицида с использованием как опрыскивателей БПЛА, так и KMS привело к significantly более низкой общей плотности сорняков и сухой массе сорняков по сравнению с засоренным контролем (p<0,001 и p=0,000 соответственно). Тест на нормальность Шапиро-Уилка подтвердил, что наборы данных были нормально распределены, в то время как тест Бартлетта показал, что дисперсия была однородной для всех наборов данных без каких-либо смещений. Результаты нормальности и однородности дисперсии представлены в Дополнительной Таблице 1. Общая плотность сорняков, зарегистрированная на тестовой делянке, составила 75,5 ± 13,36, 63,5 ± 19,80, 47,5 ± 18,38 и 220,5 ± 27,04 числа м⁻² в исследовании 1 и 83,5 ± 16,26, 88,0 ± 17,97, 62,5 ± 27,58 и 201,5 ± 31,82 числа м⁻² в исследовании 2 для опрыскивателя БПЛА при 30, 45 л га⁻¹, обработок KMS и засоренного контроля соответственно (Рисунок 7А). Численно более низкая сухая масса сорняков была зарегистрирована на делянках, обработанных гербицидом с использованием KMS (15,17 ± 2,95 и 14,70 ± 7,32 для исследования 1 и исследования 2 соответственно) (Рисунок 7B), и она была на одном уровне с обработками БПЛА. Более высокая WCE 87,4% в исследовании 1 и 84,7% в исследовании 2 была зарегистрирована для KMS. Значения WCE для обработок БПЛА при объеме распыления 30 и 45 л га⁻¹ составили 85,7% и 79,7%, 86,1% и 77,0% для исследования 1 и исследования 2 соответственно.
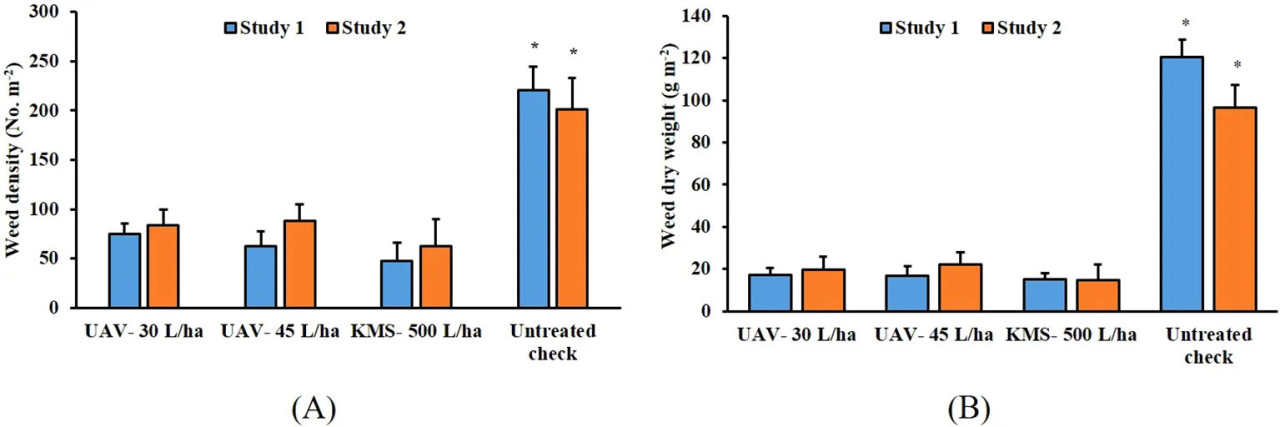
Рисунок 7 Эффективность борьбы с различными опрыскивателями и объемом распыления в отношении плотности сорняков (A) и сухой массы сорняков (B). Звездочки показывают, что обработка significantly отличается от других обработок с p value <0,05 по критерию Тьюки HSD.
4 Обсуждение
4.1 Параметры капель распыления
Наше исследование evaluated эффективный объем распыления для борьбы с сорняками гербицидами в DSR с использованием аппликатора БПЛА. Мы проанализировали параметры капель распыления для БПЛА с двумя tested объемами в сравнении с аппликатором KMS. Увеличение объема носителя с 30 до 45 л га⁻¹ с помощью БПЛА увеличило значение VMD только на 4,6% в исследовании 1 и на 4,3% в исследовании 2. Creech и др. (2015a) заключили, что увеличение объема носителя с 47 до 187 л га⁻¹ увеличило значение VMD только на 5% на constant высоте (1,4 м), что указывает на то, что размер капель гербицида не зависел от объема носителя. Аналогично, не было существенной разницы в площади покрытия распылением между обработками БПЛА с tested объемами распыления. Это можно объяснить тем, что увеличение объема распыления в рамках одной и той же системы распыления не оказывает большого влияния на площадь покрытия распылением, особенно когда погодные условия представляют наименьшую проблему, в частности environmental ветер. Изменения скорости ветра во время пролетов были относительно narrow (от 0,62 до 0,78 м с⁻¹ и от 0,81 до 0,95 м с⁻¹ для исследования 1 и исследования 2 соответственно), что указывает на minimal влияние на осаждение. Сходные результаты были reported Martin и др. (2020) в эксперименте по внесению баковой смеси с помощью БПЛА на щирицу пальмеровскую и ипомею, где объем распыления 18,7 и 37,4 л га⁻¹ дал аналогичную площадь покрытия в рамках одной и той же системы распыления.
Количество капель распыления является критическим фактором, влияющим на эффективность борьбы с сорняками. Плотность капель не была significantly различной между обработками БПЛА с tested объемами распыления. Предыдущие исследования показали, что количество капель имеет тенденцию увеличиваться по мере уменьшения размера капель (Adams и Hall, 1990; Bouse и др., 1992). Однако более мелкие капли могут привести к серьезным проблемам с дрейфом (Chen и др., 2020). Кроме того, увеличение объема распыления не повлияло на плотность капель, когда размер капель оставался тем же (Shan и др., 2021). Другой возможной причиной может быть то, что увеличение объема распыления вызвало перекрытие капель, и они стали выглядеть как одна капля. Увеличение количества капель может усилить контакт с сорняками и улучшить эффективность гербицидов, особенно с высококонцентрированными формуляциями гербицидов. Syngenta Crop Protection AG (Базель, Швейцария) recommends минимум от 30 до 40 капель см⁻² для послевсходового внесения гербицидов для достижения эффективной борьбы с сорняками (Zhu и др., 2011).
На равномерность распределения капель могут влиять рабочие параметры опрыскивателя (Qin и др., 2016) и метеорологические условия (Hussain и др., 2019). В обоих исследованиях колебания скорости ветра были относительно narrow (от 0,62 до 0,78 м с⁻¹ в исследовании 1 и от 0,81 до 0,95 м с⁻¹ в исследовании 2), что привело к minimal влиянию на осаждение капель. В то же время нисходящий поток воздуха от ротора БПЛА способствовал uniform распределению капель распыления при более низких объемах распыления (Shengde и др., 2017). Более высокая равномерность осаждения распыления, observation у БПЛА при 30 л га⁻¹, может быть обусловлена ideal параметрами полета, такими как высота полета (1,5 м) и скорость движения (5 м с⁻¹) для автономной навигации опрыскивателя БПЛА. Однако эффективность БПЛА не была uniform для всех моделей и может варьироваться в зависимости от изменений форсунок, параметров полета и моделей БПЛА. Исследователи reported, что увеличение высоты и скорости полета может привести к недостаточному и плохому равномерности осаждения капель из-за дрейфа и испарения (Zhang и др., 2020; Hunter и др., 2020). Плохая равномерность распределения распыления может negatively повлиять на эффективность внесения гербицидов и привести к плохой борьбе с сорняками. Операционные параметры полета в этом исследовании были consistent с результатами Qin и др. (2016). Напротив, плохая равномерность, зарегистрированная при обработке KMS, может быть объяснена неустойчивой скоростью ходьбы оператора и движением руки, а также пропусками и перекрытиями при работе (Wang и др., 2019). Больший размер капель и более высокий объем распыления, использованные в обработке KMS, привели к более высокому осаждению капель на пробоотборниках WSP. Conventional опрыскиватели, работающие при low давлениях, производят более крупные капли, которые имеют тенденцию быстрее осаждаться на целевых растениях сорняков. Это связано с повышенным гравитационным притяжением более крупных капель по сравнению с более мелкими, что помогает уменьшить потери от дрейфа и испарения капель (Chen и др., 2020).
4.2 Эффективность борьбы с сорняками
Большая борьба с сорняками была достигнута при объеме распыления 500 л га⁻¹ с использованием KMS, что было сравнимо с обработками БПЛА. Эффективность гербицидов не зависела от объемов носителя, в частности для БПЛА. Это можно объяснить uniform осаждением капель на растениях сорняков и ключевой ролью нисходящего потока ротора БПЛА в проникновении капель в густые системы полога посевов. Martin и др. (2020) reported, что распыление на основе БПЛА с объемом распыления 37,4 л га⁻¹ привело к 4-кратному увеличению осаждения капель на абаксиальной поверхности листвы сорняков по сравнению с conventional опрыскивателем с объемом распыления 140 л га⁻¹. Внесение системного гербицида (биспирибак-натрия) с использованием методов БПЛА и KMS significantly снизило плотность сорняков по сравнению с необработанным контролем, что подтверждает, что эффективность гербицида не зависела от методов внесения. Внесение биспирибака-натрия привело к эффективной борьбе с сорняками на всех обработанных делянках, поскольку он ингибирует биосинтез фермента ацетолактатсинтазы, тем самым останавливая рост сорняков. Аналогично, Jeevan и др. (2023b) также stated, что не было существенной разницы между эффективностью системного гербицида при внесении с БПЛА и conventional методами.
В обоих исследованиях внесение гербицида привело к значительному снижению сухой массы сорняков при использовании KMS, что было сравнимо с обработками БПЛА. Сходные результаты были reported Pranaswi и др. (2024) и подтверждено, что внесение системного гербицида метрибузина на пшеницу через БПЛА привело к аналогичной борьбе с сорняками по сравнению с ранцевым внесением (Pranaswi и др., 2024). Аналогично, Kumar и др. (2022) также reported об отсутствии существенной разницы в эффективности борьбы с сорняками между low и high объемным внесением системных гербицидов через БПЛА и ранцевые опрыскиватели на пшенице. В обоих исследованиях WCE при обработках БПЛА была аналогична KMS с narrow вариацией от 1,7% до 5,1% WCE, зарегистрированной между KMS и БПЛА при 30 л га⁻¹. Это подтверждает, что метод внесения и объем носителя не повлияли на эффективность гербицида. Chen и др. (2019) reported, что смеси гербицидов (изопротурон + клодинафоп-пропаргил + мезосульфурон), внесенные через БПЛА на пшенице, дали аналогичную WCE по сравнению с conventional ранцевым опрыскивателем. Однако эффекты объема распыления на эффективность гербицидов могут варьироваться в зависимости от физико-химических свойств гербицидов, таких как растворимость, распределение капель, удерживающая способность и химическая стабильность. Например, контактные гербициды требуют большего объема носителя, чем системные гербициды для внесения с БПЛА, для достижения желаемого распределения капель и удержания на целевом сорняке (Shan и др., 2021). Creech и др. (2015b) reported, что требования к объему носителя для улучшения эффективности для различных гербицидов (глифосат, глуфосинат, лактофен, флуазифоп-Р и 2,4-D) не были uniform в полевых и тепличных экспериментах, что указывает на необходимость учета конкретных условий внесения при оценке влияния объема распыления на гербицидную эффективность.
5 Выводы
Результаты этого исследования показывают, что такие параметры капель, как VMD, площадь покрытия распылением, плотность капель и осаждение капель, увеличивались с более высокими объемами распыления. Большая равномерность распределения капель была observation у БПЛА при 30 л га⁻¹. Кроме того, распыление гербицидов на основе БПЛА в системе DSR показывает большой потенциал для снижения плотности сорняков и сухой массы сорняков, достигая уровней эффективности, comparable с методом KMS. В целом, эти результаты highlight, что improved эффективность борьбы с сорняками была достигнута при внесении с помощью БПЛА (гексакоптера) с более низкими объемами носителя (30 л га⁻¹). Этот подход имеет потенциал для ограничения воздействия вредных химикатов на человека. Будущие направления исследований будут включать оптимизацию объема распыления для различных контактных гербицидов при внесении с БПЛА, а также совершенствование операционных параметров БПЛА. Эти параметры включают такие факторы, как высота внесения в различных ветровых условиях, скорость опрыскивателя БПЛА, конфигурации форсунок и использование адъювантов и их влияние на осаждение капель. Кроме того, могут быть оценены исследования дрейфа гербицидного распыления с БПЛА и его влияния на чувствительные нецелевые культуры в условиях мелкого землевладения для поддержания геопривязанных буферных зон. Такие целевые исследовательские усилия, несомненно, будут способствовать эволюции и улучшению систем распыления с БПЛА, укрепляя их роль как sustainable и универсального решения для современной борьбы с сорняками в сельском хозяйстве.
Дополнительные материалы
Дополнительные материалы к этой статье можно найти в интернете по адресу: https://www.frontiersin.org/articles/10.3389/fagro.2024.1491842/full#supplementary-material
Ссылки
1. Abd Ghani M. A., Juraimi A. S., Su A. S. M., Ahmad-Hamdani M. S., Islam A. M., Motmainna M. (2024). Chemical weed control in direct-seeded rice using drone and mist flow spray technology. Crop Prot. 184, 106853. doi: 10.1016/j.cropro.2024.106853. CrossRef Google Scholar
2. Adams A. J., Hall F. R. (1990). Initial behavioural responses of Aphis gossypii to defined deposits of bifenthrin on chrysanthemum. Crop Prot. 9, 39–43. doi: 10.1016/0261-2194(90)90044-8. CrossRef Google Scholar
3. Ahirwar S., Swarnkar R., Bhukya S., Namwade G. (2019). Application of drone in agriculture. Int. J. Cur Micro Appl. Sci. 8, 2500–2505. doi: 10.20546/ijcmas.2019.801.264. CrossRef Google Scholar
4. Ahmad F., Qiu B., Dong X., Ma J., Huang X., Ahmed S., et al. (2020). Effect of operational parameters of UAV sprayer on spray deposition pattern in target and off-target zones during outer field weed control application. Comput. Electron Agr. 172, 1–10. doi: 10.1016/j.compag.2020.105350. CrossRef Google Scholar
5. Arthanari P. M., Paul R. A. I. (2022). "Herbicide application using drones: advantage and constraints," in Technological glimpses on weeds and their management. Eds. Mishra J. S., Sushilkumar, Rao A. N. (Jabalpur: Indian Society of Weed Science), 79–81. Google Scholar
6. Bhushan L., Ladha J. K., Gupta R. K., Singh S., Tirol-Padre A., Saharawat Y., et al. (2007). Saving of water and labor in a rice-wheat system with no-tillage and direct seeding technologies. Agron. J. 99, 1288–1296. doi: 10.2134/agronj2006.0227. CrossRef Google Scholar
7. Bouse L. F., Whisenant S., Carlton J. B. (1992). Aerial spray deposition on mesquite. T ASAE 35, 51–59. doi: 10.13031/2013.28569. CrossRef Google Scholar
8. Cao L., Cao C., Wang Y., Li X., Zhou Z., Li F., et al. (2017). Visual determination of potential dermal and inhalation exposure using allura red as an environmentally friendly pesticide surrogate. ACS Sustain Chem. Eng. 5, 3882–3889. doi: 10.1021/acssuschemeng.6b03050. CrossRef Google Scholar
9. Chaudhary A., Venkatramanan V., Mishra A. K., Sharma S. (2022). Agronomic and environmental determinants of direct seeded rice in South Asia. Circ. Econ Sust. 3, 253–290. doi: 10.1007/s43615-022-00173-x. CrossRef Google Scholar
10. Chauhan B. S., Johnson D. E. (2011). Ecological studies on Echinochloa crus-galli and the implications for weed management in direct-seeded rice. Crop Prot. 30, 1385–1391. doi: 10.1016/j.cropro.2011.07.013. CrossRef Google Scholar
11. Chauhan B. S., Mahajan G., Sardana V., Timsina J., Jat M. L. (2012). Productivity and sustainability of the rice-wheat cropping system in the Indo-Gangetic Plains of the Indian subcontinent: problems, opportunities, and strategies. Adv. Agron. 117, 315–369. doi: 10.1016/B978-0-12-394278-4.00006-4. CrossRef Google Scholar
12. Chen S., Lan Y., Zhou Z., Ouyang F., Wang G., Huang X., et al. (2020). Effect of droplet size parameters on droplet deposition and drift of aerial spraying by using plant protection UAV. Agronomy 10, 1–15. doi: 10.3390/agronomy10020195. CrossRef Google Scholar
13. Chen Y., Qi H., Li G., Lan Y. (2019). Weed control effect of unmanned aerial vehicle (UAV) application in wheat field. Int. J. Precis Agric. Aviat. 2, 25–31. doi: 10.33440/j.ijpaa.20190202.45. CrossRef Google Scholar
14. Creech C. F., Henry R. S., Fritz B. K., Kruger G. R. (2015a). Influence of herbicide active ingredient, nozzle type, orifice size, spray pressure, and carrier volume rate on spray droplet size characteristics. Weed Technol. 29, 298–310. doi: 10.1614/WT-D-14-00049.1. CrossRef Google Scholar
15. Creech C. F., Henry R. S., Werle R., Sandell L. D., Hewitt A. J., Kruger G. R. (2015b). Performance of post emergence herbicides applied at different carrier volume rates. Weed Technol. 29, 611–624. doi: 10.1614/WT-D-14-00101.1. CrossRef Google Scholar
16. Dass A., Shekhawat K., Anil K., Sepat S., Rathore S. S., Mahajan G., et al. (2017). Weed management in rice using crop-competition. Crop Prot. 95, 45–52. doi: 10.1016/j.cropro.2016.08.005. CrossRef Google Scholar
17. Farooq M., Siddique K. H., Rehman H., Aziz T., Lee D. J., Wahid A. (2011a). Rice direct seeding: experiences, challenges and opportunities. Soil Till Res. 111, 87–98. doi: 10.1016/j.still.2010.10.008. CrossRef Google Scholar
18. Farooq M., Flower K., Jabran K., Wahid A., Siddique K. H. (2011b). Crop yield and weed management in rainfed conservation agriculture. Soil Till Res. 117, 172–183. doi: 10.1016/j.still.2011.10.001. CrossRef Google Scholar
19. Ferguson J. C., Chechetto R. G., Adkins S. W., Hewitt A. J., Chauhan B. S., Kruger G. R., et al. (2018). Effect of spray droplet size on herbicide efficacy on four winter annual grasses. Crop Prot. 112, 118–124. doi: 10.1016/j.cropro.2018.05.020. CrossRef Google Scholar
20. Fritz B. (2006). Meteorological effects on deposition and drift of aerially applied sprays. T ASABE 49, 1295–1301. doi: 10.13031/2013.22038. CrossRef Google Scholar
21. Fukagawa N. K., Ziska L. H. (2019). Rice: Importance for global nutrition. J. Nutr. Sci. Vitaminol 65, S2–S3. doi: 10.3177/jnsv.65.S2. CrossRef Google Scholar
22. Haindavi P., Chandrasekhar K., Lakshmi N. V., Prasad P. R. (2018). Assessment of yield, consumptive use and water use efficiency of dry sown rice (Oryza sativa L.) influenced by irrigation schedules and weed management options. Bull. Env. Pharmacol. Life Sci. 7, 62–66. Google Scholar
23. Hunter J. E., Gannon T. W., Richardson R. J., Yelverton F. H., Leon R. G. (2020). Coverage and drift potential associated with nozzle and speed selection for herbicide applications using an unmanned aerial sprayer. Weed Technol. 34, 235–240. doi: 10.1017/wet.2019.101. CrossRef Google Scholar
24. Hussain S., Cheema M. J., Arshad M., Ahmad A., Latif M. A., Ashraf S., et al. (2019). Spray uniformity testing of unmanned aerial spraying system for precise agro-chemical applications. Pak J. Agr Sci. 56, 897–903. doi: 10.21162/PAKJAS/19.8594. CrossRef Google Scholar
25. Indiastat (2023). Agricultural rice production. Available online at: https://www.Indiastat.com/data/agriculture/rice (Accessed July 27, 2024). Google Scholar
26. Jabran K., Hussain M., Farooq M., Baba M., Dogan M. N., Lee D. J. (2012). Application of bispyribac-sodium provides effective weed control in direct-planted rice on a sandy loam soil. Weed Biol. Manag 12, 136–145. doi: 10.1111/j.1445-6664.2012.00446.x. CrossRef Google Scholar
27. Jeevan N., Pazhanivelan S., Kumaraperumal R., Ragunath K., Arthanari P. M., Sritharan N., et al. (2023a). Effect of different spray volumes on deposition characteristics of a fuel-operated UAV sprayer using herbicides in transplanted rice (Oryza sativa). Indian J. Agr Sci. 93, 720–725. doi: 10.56093/ijas.v93i7.133995. CrossRef Google Scholar
28. Jeevan N., Pazhanivelan S., Kumaraperumal R., Ragunath K., Arthanari P. M., Sritharan N., et al. (2023b). Effect of different herbicide spray volumes on weed control efficiency of a battery-operated unmanned aerial vehicle sprayer in transplanted rice (Oryza sativa L.). J. Appl. Nat. Sci. 15, 972–977. doi: 10.31018/jans.v15i3.4753. CrossRef Google Scholar
29. Kumar N., Chhokar R., Meen R., Kharub A., Gill S., Tripathi S., et al. (2021). Challenges and opportunities in productivity and sustainability of rice cultivation system: a critical review in Indian perspective. Cereal Res. Commun. 50, 573–601. doi: 10.1007/s42976-021-00214-5. CrossRef Google Scholar
30. Kumar S., Singh M., Singh S. K., Bhullar M. S. (2022). Droplet distribution and weed control efficacy of unmanned aerial vehicle sprayer in wheat crop. J. Agricul Eng. 59, 126–136. doi: 10.52151/jae2022592.1770. CrossRef Google Scholar
31. Kumar V., Ladha J. K. (2011). Direct seeding of rice: recent developments and future research needs. Adv. Agron. 111, 297–413. doi: 10.1016/B978-0-12-387689-8.00001-1. CrossRef Google Scholar
32. Legleiter T. R., Johnson W. G. (2016). Herbicide coverage in narrow row soybean as influenced by spray nozzle design and carrier volume. Crop Prot. 83, 1–8. doi: 10.1016/j.cropro.2016.01.009. CrossRef Google Scholar
33. Li Y., Li Y., Pan X., Li Q., Chen R., Li X., et al. (2017). Comparison of spray deposition, loss and residue of azoxystrobin and tebuconazole in sunlit greenhouse tomato and field cucumber of a new air-assisted sprayer and two conventional sprayers. Pest Mang Sci. 74, 448–455. doi: 10.1002/ps.4728. CrossRef Google Scholar
34. Mani V., Malla M., Gautam K. C. (1973). Weed-killing chemicals in potato cultivation. Indian Farming 23, 17–18. Google Scholar
35. Martin D., Singh V., Latheef M. A., Bagavathiannan M. (2020). Spray deposition on weeds (Palmer amaranth and Morningglory) from a remotely piloted aerial application system and backpack sprayer. Drones 3, 1–21. doi: 10.3390/drones4030059. CrossRef Google Scholar
36. Meivel S., Maguteeswaran R., Gandhiraj N., Srinivasan G. (2016). Quadcopter UAV based fertilizer and pesticide spraying system. Int. Acad. Res. J. Eng. Sci. 1, 8–12. Google Scholar
37. Meng Y., Su J., Song J., Chen W. H., Lan Y. (2020). Experimental evaluation of UAV spraying for peach trees of different shapes: Effects of operational parameters on droplet distribution. Comput. Electron Agr 170, 1–12. doi: 10.1016/j.compag.2020.105282. CrossRef Google Scholar
38. Mink R., Dutta A., Peteinatos G. G., Sokefeld M., Engels J. J., Hahn M., et al. (2018). Multi-Temporal Site-Specific weed control of Cirsium arvense (L.) Scop. and Rumex crispus L. @ in maize and sugar beet using unmanned aerial vehicle based mapping. Agriculture 8, 1–14. doi: 10.3390/agriculture8050065. CrossRef Google Scholar
39. Mondal B., Bisen J., Jambhulkar N. N., Tripathi R. (2022). Rice supply, demand and exportable surplus in India: Present vis-à-vis thirty years ahead. Oryza 59, 504–511. doi: 10.35709/ory.2019.56.2. CrossRef Google Scholar
40. Paul R. A. I., Arthanari P. M., Pazhanivelan S., Kavitha R., Djanaguiraman M. (2023a). UAV-based herbicide application for efficient weed management in direct-seeded rice. Agr Sci. Dig. 44, 295–300. doi: 10.18805/ag.D-5826. CrossRef Google Scholar
41. Paul R. A. I., Arthanari P. M., Pazhanivelan S., Kavitha R., Djanaguiraman M. (2023b). Drone-based herbicide application for energy saving, higher weed control and economics in direct-seeded rice (Oryza sativa). Indian J. Agr Sci. 93, 704–709. doi: 10.56093/ijas.v93i7.137859. CrossRef Google Scholar
42. Pranaswi D., Jagtap M. P., Shinde G. U., Khatri N., Shetty S., Pare S. (2024). Analyzing the synergistic impact of UAV-based technology and knapsack sprayer on weed management, yield-contributing traits, and yield in wheat (Triticum aestivum L.) for enhanced agricultural operations. Comput. Electron Agr. 219, 108796. doi: 10.1016/j.compag.2024.108796. CrossRef Google Scholar
43. Qin W. C., Qiu B. J., Xue X. Y., Chen C., Xu Z. F., Zhou Q. Q. (2016). Droplet deposition and control effect of insecticides sprayed with an unmanned aerial vehicle against plant hoppers. Crop Prot. 85, 79–88. doi: 10.1016/j.cropro.2016.03.018. CrossRef Google Scholar
44. Rejeb A., Abdollahi A., Rejeb K., Treiblmaier H. (2022). Drones in agriculture a review and bibliometric analysis. Comput. Electron Agr. 198, 107017. doi: 10.1016/j.compag.2022.107017. CrossRef Google Scholar
45. S386.2, ASABE Standards (2018). Calibration and Distribution Pattern Testing of Agricultural Aerial Application Equipment. St. Joseph, MI, USA: ASABE. Google Scholar
46. Shan C., Wang G., Wang H., Wang H., Wang S., Chen S., et al. (2021). Effects of droplet size and spray volume parameters on droplet deposition of wheat herbicide application by using UAV. Int. J. Agr Biol. Eng. 14, 74–81. doi: 10.25165/j.ijabe.20211401.6129. CrossRef Google Scholar
47. Shengde C., Lan Y., Jiyu L., Zhiyan Z., Aimin L., Yuedong M. (2017). Effect of wind field below unmanned helicopter on droplet deposition distribution of aerial spraying. Int. J. Agr Biol. Eng. 10, 67–77. doi: 10.3965/j.ijabe.20171003.3078. CrossRef Google Scholar
48. Singh G., Singh R., Singh V., Singh B., Nayak R. (1999). Effect of crop weed competition on yield and nutrient uptake by direct-seeded rice (Oryza sativa) in rainfed lowland situation. Indian J. Agron. 44, 722–727. doi: 10.59797/ija.v44i4.3577. CrossRef Google Scholar
49. Steel R., Torrie J., Dickey D. (1997). Principles and Procedures of Statistics: A Biometrical Approach. 3rd edn. New York: McGraw-Hill Book Company, 352–358. Google Scholar
50. Telli K., Kraa O., Himeur Y., Ouamane A., Boumehraz M., Atalla S., et al. (2023). A comprehensive review of recent research trends on unmanned aerial vehicles (UAVs). Systems 11, 400. doi: 10.3390/systems11080400. CrossRef Google Scholar
51. Tomita S., Miyagawa S., Kono Y., Noichana C., Inamura T., Nagata Y., et al. (2003). Rice yield losses by competition with weeds in rainfed paddy fields in north-east Thailand. Weed Biol. Manag 3, 162–171. doi: 10.1046/j.1445-6664.2003.00101.x. CrossRef Google Scholar
52. Vijayakumar S., Madireddy H., Bhusarapu S. C., Kumar R., Sundaram R. (2022). Drone application in rice cultivation: Experiences from ICAR-IIRR trails. Indian Farming. 72, 3–6. Google Scholar
53. Vijayakumar S., Nayak A. K., Poonam A., Aravindan S., Khanam R. (2020). Unmanned aerial vehicle (UAV) and its application in Indian agriculture: A perspective. Indian Farming. 70, 34–37. Google Scholar
54. Wang D. S., Zhang J. X., Zhang S. L., Xiong B., Qu F., Li X., et al. (2017). Spraying parameters and droplet deposition distribution analysis of CD-15 unmanned helicopter. Int. Agricul Eng. J. 26, 41–50. Google Scholar
55. Wang G., Lan Y., Yuan H., Qi H., Chen P., Ouyang F., et al. (2019). Comparison of spray deposition, control efficacy on wheat aphids and working efficiency in the wheat field of the unmanned aerial vehicle with boom sprayer and two conventional knapsack sprayers. Appl. Sci-Basel 9, 1–16. doi: 10.3390/app9020218. CrossRef Google Scholar
56. Wen S., Zhang Q., Deng J., Lan Y., Yin X., Shan J. (2018). Design and experiment of a variable spray system for unmanned aerial vehicles based on PID and PWM control. Appl. Sci-Basel 8, 1–22. doi: 10.3390/app8122482. CrossRef Google Scholar
57. Whitney R., Gardisser D. (2003). DropletScan Operators Manual. Stillwater, OK, USA: WRK of Oklahoma and WRK of Arkansas. Google Scholar
58. Yang F., Xue X., Cai C., Sun Z., Zhou Q. (2018). Numerical simulation and analysis on spray drift movement of multirotor plant protection unmanned aerial vehicle. Energies 11, 1–20. doi: 10.3390/en11092399. CrossRef Google Scholar
59. Zhang X. Q., Song X. P., Liang Y. J., Qin Z. Q., Zhang B. Q., Wei J. J., et al. (2020). Effects of spray parameters of drone on the droplet deposition in sugarcane canopy. Sugar Tech 22, 583–588. doi: 10.1007/s12355-019-00792-z. CrossRef Google Scholar
60. Zhu H., Salyani M., Fox R. D. (2011). A portable scanning system for evaluation of spray deposit distribution. Comput. Electron Agr 76, 38–43. doi: 10.1016/j.compag.2011.01.003. CrossRef Google Scholar
Paul RAI, Palanisamy MA, Peramaiyan P, Kumar V, Bagavathiannan M, Gurjar B, Vijayakumar S, Djanaguiraman M, Pazhanivelan S and Ramasamy K (2024) Spray volume optimization with UAV-based herbicide application for effective droplet deposition and weed control in direct-seeded rice. Front. Agron. 6:1491842. doi: 10.3389/fagro.2024.1491842
Перевод статьи «Spray volume optimization with UAV-based herbicide application for effective droplet deposition and weed control in direct-seeded rice» авторов Paul RAI, Palanisamy MA, Peramaiyan P, Kumar V, Bagavathiannan M, Gurjar B, Vijayakumar S, Djanaguiraman M, Pazhanivelan S and Ramasamy ., оригинал доступен по ссылке. Лицензия: CC BY. Изменения: переведено на русский язык




















































































































Комментарии (0)