Мобильная робототехника в «умном» сельском хозяйстве: современные тенденции и применения
В последние годы точное земледелие и «умное» сельское хозяйство развиваются стремительными темпами, поскольку пахотные земли становятся всё более дефицитными. По данным Продовольственной и сельскохозяйственной организации ООН (ФАО), к 2050 году мировое производство сельхозпродукции должно вырасти примерно на треть по сравнению с текущим уровнем. В связи с этим фермеры активно используют удобрения для стимулирования роста культур и повышения урожайности, что, однако, негативно сказалось на улучшении пищевой ценности продуктов.
Аннотация
Для решения проблем, связанных с производительностью, воздействием на окружающую среду, безопасностью продуктов питания, потерями урожая и устойчивостью развития, в сельском хозяйстве всё шире применяются мобильные роботы, которые в основном интегрируют процессы планирования маршрутов и сбора информации о посевах. Современные сельскохозяйственные робототехнические системы имеют большие размеры и высокую стоимость, поскольку используют компьютер в качестве сервера, а мобильных роботов — в качестве клиентов. В данной статье рассматривается применение мобильной робототехники в сельском хозяйстве для снижения затрат, уменьшения воздействия на окружающую среду и оптимизации урожаев. Описано текущее состояние мобильной робототехники, используемые технологии, применяемые алгоритмы и соответствующие результаты, полученные в области «умного» сельского хозяйства. В заключение представлены также проблемы, которые предстоит решить в рамках новых технологий «умного» земледелия: условия окружающей среды, стоимость внедрения, технические требования, автоматизация процессов, связь и вычислительный потенциал. В качестве одного из вкладов данной статьи был сделан вывод о том, что ведущими технологиями для внедрения «умного» сельского хозяйства являются: Интернет вещей (IoT), мобильная робототехника, искусственный интеллект, техническое зрение, многокритериальное управление и большие данные. Одним из возможных технологических решений, которое может быть реализовано, является разработка полностью автономной, недорогой сельскохозяйственной мобильной робототехнической системы, не зависящей от сервера.
1. Введение
В последние годы численность населения мира беспрецедентно выросла, что привело к значительным изменениям в спросе на продовольствие (Dhumale and Bhaskar, 2021). По мере движения в будущее ожидается, что спрос на продовольствие будет продолжать расти под воздействием таких факторов, как рост населения, урбанизация и изменение пищевых предпочтений. Кроме того, последствия изменения климата также повлияли на спрос и предложение продовольствия, создав новые проблемы для пищевой промышленности (Dutta et al., 2021). В работе Springmann et al. (2018) упоминается, что к 2050 году производство в продовольственной цепочке может увеличиться на 50%. Кроме того, ФАО показывает, что к этому году население мира достигнет примерно 10 миллиардов (Ahmed et al., 2018). Этот рост населения влияет на состояние окружающей среды, что изменяет процесс уборки урожая, вынуждая фермеров использовать удобрения и пестициды (Shafi et al., 2019). Остатки этих химических загрязнителей загрязняют воду (Rajeshwari et al., 2021). Другой проблемой является пищевая ценность продуктов, поскольку, как было сказано ранее, состояние окружающей среды ухудшается, создавая наводнения и засухи. Следовательно, люди не получают достаточного количества питательных веществ для поддержания здоровья, употребляя обработанные продукты, и нуждаются в таблетках и добавках (Mostari et al., 2021). Межправительственная группа экспертов по изменению климата (МГЭИК) предупреждает, что глобальное потепление снижает пищевую ценность сельскохозяйственных культур из-за интенсивного использования удобрений для повышения урожайности; они также прогнозируют, что в ближайшие годы люди могут страдать от дефицита цинка, что может вызвать даже психологические и когнитивные расстройства (Ryan et al., 2021).
Технологии в индустрии производства продуктов питания являются серьезной проблемой, которая препятствует прогрессу и инновациям в этом важнейшем секторе. В связи с быстро растущим населением мира и увеличением спроса на продовольствие стало крайне необходимым внедрение технологических достижений для улучшения производства и распределения продуктов питания (Ferrag et al., 2021). Однако во многих частях мира, особенно в развивающихся странах, технологии в производстве продуктов питания все еще нуждаются в улучшении, что приводит к низкой производительности, большим потерям продовольствия и снижению эффективности. Учитывая, что большая часть производства продуктов питания приходится на развивающиеся страны, существует недостаток передовых сельскохозяйственных технологий (Khan et al., 2021). Они сталкиваются с серьезными финансовыми ограничениями и ограниченным доступом к современным технологиям, что может препятствовать их способности улучшать процессы производства продуктов питания. Эта проблема также распространяется на образование и подготовку рабочей силы, которая может не обладать знаниями и навыками для эффективного управления технологическими инструментами и оборудованием и их обслуживания (Xuan, 2021).
Чтобы смягчить вышеупомянутые проблемы, связанные с продовольственным снабжением, ФАО предлагает четыре ключевых пункта для обеспечения качества продовольствия в ближайшие годы, которые тесно связаны с использованием технологий, поскольку информация играет фундаментальную роль в обеспечении экономического и экологического воздействия новых передовых технологий в процессе производства продуктов питания (Mooney, 2020).
Внедрение новых технологий в сельское хозяйство часто называют «умным» сельским хозяйством, которое направлено на повышение производительности, эффективности и устойчивости (Raj et al., 2021). В работе Belhadi et al. (2021) упоминается, что «умное» сельское хозяйство может использовать передовые технологии, такие как робототехника, искусственный интеллект и Интернет вещей. Таким образом, эти устройства могут собирать данные с посевов для извлечения внутренних знаний о растениях с целью улучшения принятия решений в сельском хозяйстве и снижения воздействия на окружающую среду (Megeto et al., 2021). Однако полное раскрытие потенциала «умного» сельского хозяйства сопряжено с рядом технических, социально-экономических и административных проблем (Mengoli et al., 2021). Такие работы, как Ahmed et al. (2016), Jawad et al. (2017), Bermeo-Almeida et al. (2018), Kamilaris and Prenafeta-Boldu (2018) и Rahmadian and Widyartono (2020), представляют широкие подходы к «умному» сельскому хозяйству и передовым технологиям, не фокусируясь исключительно на роботах. В этих исследованиях не приводится подробного обсуждения инструментов и методов, используемых для разработки различных мобильных систем, и уровня их зрелости. Актуально обсудить использование мобильной робототехники в «умном» сельском хозяйстве с разных точек зрения и описать соответствующие нюансы.
Данная статья выгодно отличается от других подобных работ тем, что предлагает широкий обзор проблем и возможностей, представленных точным земледелием и роботизированным сельским хозяйством. Статья фокусируется на использовании робототехники и точного земледелия в сельском хозяйстве 4.0 и предоставляет подробное описание многих типов сельскохозяйственных роботов, а также методов и аппаратного обеспечения, используемых для их работы и мониторинга. Кроме того, в статье освещаются области, в которых литература наименее развита, и предлагаются возможные решения для решения этих проблем. Также обсуждаются будущие тенденции в точном земледелии и робототехнике, включая использование алгоритмов многокритериального управления и искусственного интеллекта в недорогих мобильных роботах для планирования оптимального маршрута с учетом энергоэффективности, типа почвы и препятствий, а также для оценки и управления вредителями и болезнями, поражающими культуры.
Цель данной работы – представить обзор мобильной робототехники, применяемой для сельскохозяйственного производства в рамках технологий «умного» сельского хозяйства. Основной вклад этой работы заключается в демонстрации существующих платформ, инструментов и приложений, где в настоящее время используются роботы. Кроме того, в ней представлены недостатки приложений «умного» сельского хозяйства, которые могут определить будущие тенденции в развитии роботов. Остальная часть рукописи структурирована следующим образом: Раздел 2 дает представление об «умном» сельском хозяйстве и подробный обзор ведущих мобильных роботов с существующими технологиями. Раздел 3 представляет обсуждение, выделяющее технические и социально-экономические препятствия на пути успешной интеграции мобильной робототехники в сельское хозяйство. Раздел 4 представляет будущие тенденции, связанные с мобильной робототехникой в сельском хозяйстве. Наконец, Раздел 5 представляет выводы.
2. Методология исследования
Был проведен систематический обзор литературы (Systematic Literature Review, SLR) для систематизации имеющихся знаний и выявления исследований, связанных с заявленной темой (Ahmed et al., 2016), особенно для изучения состояния мобильной робототехники в точном земледелии. В частности, мы искали статьи по «мобильной робототехнике» с термином «сельское хозяйство 4.0» в названии, аннотации или ключевых словах. Перед проведением SLR был определен протокол обзора для обеспечения прозрачного, качественного и всестороннего исследовательского процесса (Page et al., 2021), включающего три этапа: формулирование исследовательских вопросов, определение стратегии поиска и указание критериев включения и исключения. Для проведения SLR был использован предпочтительный подход к отчетности для систематических обзоров и мета-анализов (PRISMA).
2.1. Протокол обзора
Перед началом библиографического анализа был определен протокол обзора для выявления, оценки и интерпретации релевантных результатов по теме исследования (см. Таблицу 1). Первым шагом была формулировка исследовательских вопросов для выявления исследований, опубликованных по интересующей теме с разных точек зрения. Затем были определены соответствующие ключевые слова для формулировки поисковых запросов с целью получения релевантной информации с использованием четырех баз данных: IEEE Xplore, Web of Science, Scopus и ScienceDirect. Для уточнения результатов поиска были определены критерии включения и исключения для оценки содержания публикаций, которые использовались в качестве предварительного фильтра источников метаданных и ограничения объема исследования.
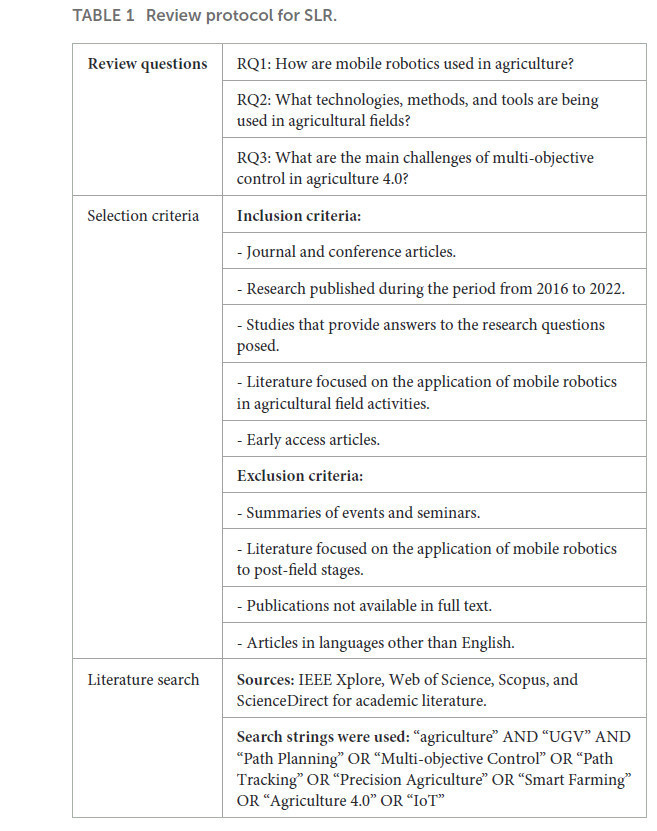
Таблица 1 – Протокол обзора для SLR.
После выполнения SLR было получено 69 исследовательских статей по предложенной теме. После этапов отбора и проверки соответствия по PRISMA с помощью библиографического менеджера Mendeley были выявлены и удалены дублирующиеся файлы, в результате чего осталось в общей сложности 65 научных работ, как показано на Рисунке 1.
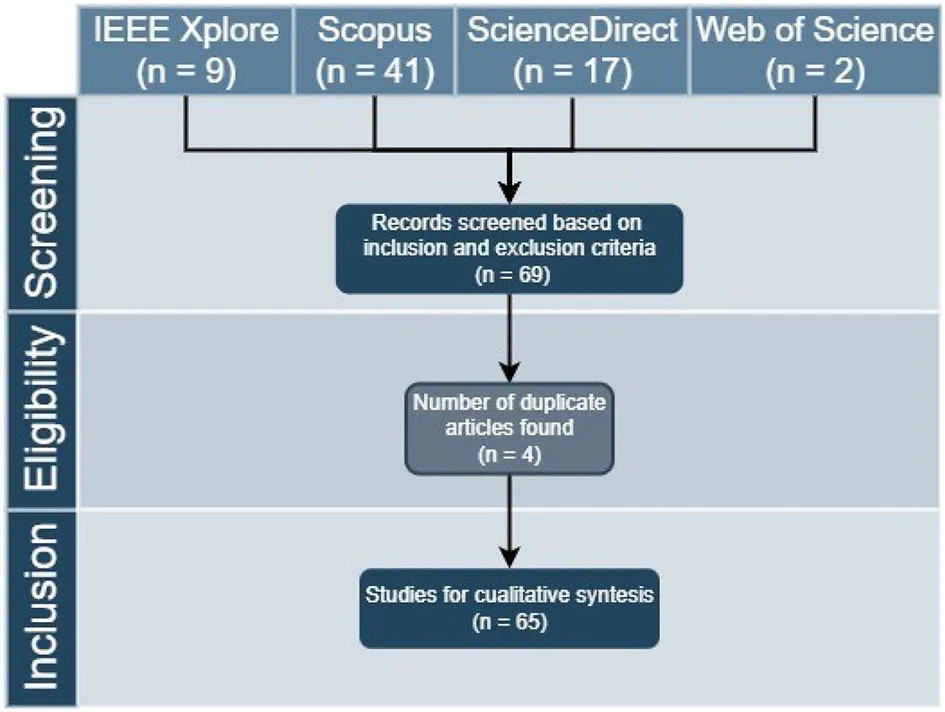
Рисунок 1 – Трехэтапная оценка процесса поиска литературы (PRISMA).
2.2. Тенденции в сельском хозяйстве
Распределение 65 статей по годам показывает, что около 38% самых последних научных работ были опубликованы в 2021 году, что отражает значительный прогресс сельского хозяйства в контексте мобильной робототехники, хотя темпы все еще можно считать медленными по сравнению с другими областями, такими как здравоохранение, производство, горнодобывающая промышленность, автоматизация, энергетика и другие (Araújo et al., 2021).
На Рисунке 2 представлена разбивка публикаций по пяти наиболее распространенным видам деятельности, выполняемым в сельском хозяйстве 4.0, и типу используемого мобильного робота. Категория «множественные задачи в поле» включает такие виды деятельности, как распознавание и отслеживание рядков, обнаружение и предотвращение препятствий, а также сбор и передача информации как в открытом, так и в тепличном сельском хозяйстве.
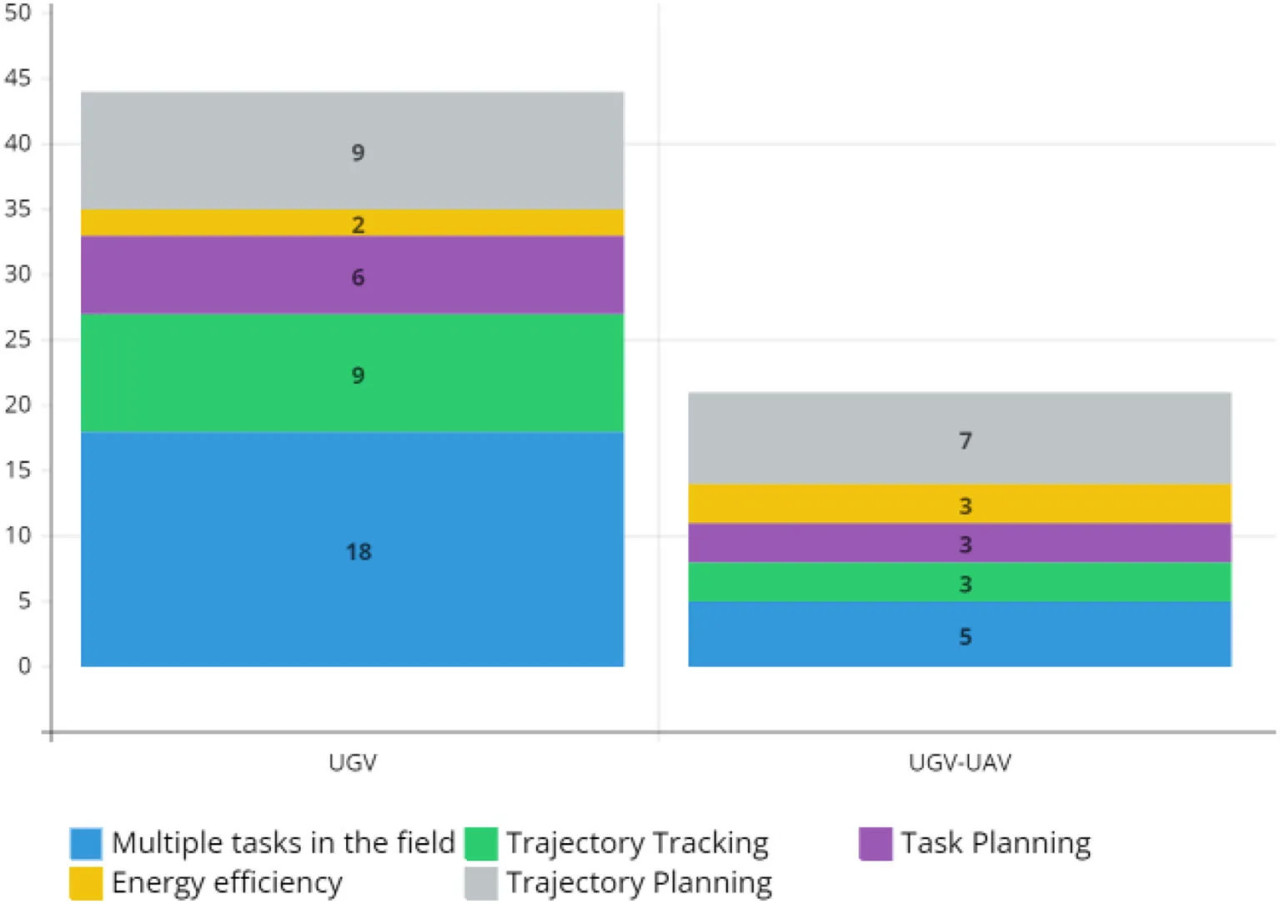
Рисунок 2 – Деятельность мобильной робототехники в сельском хозяйстве.
Согласно Международной федерации робототехники (IFR), пятью основными областями применения сервисных роботов для профессионального использования, проданных в течение 2019 и 2020 годов, являются: транспортировка и логистика, профессиональная уборка, медицинская робототехника, гостиничный бизнес и сельское хозяйство (International Federation of Robotics, 2021). На Рисунке 3 показан процент роботов, используемых в каждой из этих областей.
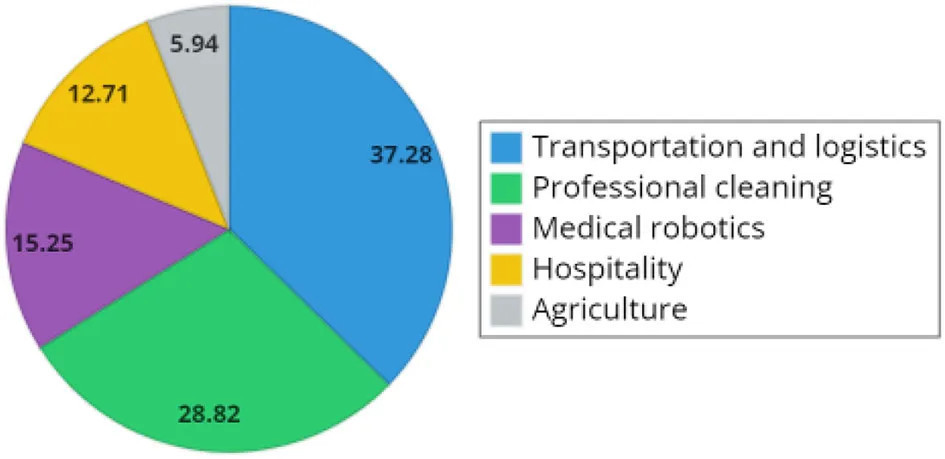
Рисунок 3 – Процентное соотношение пяти основных областей применения сервисных роботов в 2020 году.
3. Обзор и смежные работы
«Умное» сельское хозяйство – это технология, использующая передовые методы для оптимизации урожайности и эффективности сельскохозяйственного производства. В работе Lohchab et al. (2018) исследовано применение технологий Интернета вещей в «умном» сельском хозяйстве. Затем, в обзорной статье 2020 года Sharma et al. (2020) сосредоточились на использовании искусственного интеллекта и машинного обучения в «умном» сельском хозяйстве. Кроме того, в обзорной статье 2021 года Ratnaparkhi et al. (2020) обсудили внедрение сенсорных технологий и географических информационных систем (ГИС) для «умного» сельского хозяйства. Наконец, в недавней обзорной статье 2022 года Botta et al. (2022) рассмотрели интеграцию робототехники и автоматизации в «умном» сельском хозяйстве. Некоторые темы, которым в «умном» сельском хозяйстве уделено очень мало внимания: интеграция «умного» сельского хозяйства с циркулярной экономикой и экологической устойчивостью, разработка и применение технологий искусственного интеллекта и машинного обучения в идентификации и управлении вредителями и болезнями, повышенное внимание к оптимизации водопользования и управлению ирригацией в ответ на изменение климата и ограниченную доступность воды, улучшение связности и совместимости систем для облегчения масштабного внедрения и реализации, а также разработка специальных недорогих решений для мелких фермерских хозяйств и сельских сообществ в развивающихся странах для улучшения продовольственной безопасности и сокращения сельской бедности.
3.1. «Умное» сельское хозяйство
«Умное» сельское хозяйство основано на информации, предоставляемой датчиками, размещенными на сельскохозяйственном поле (Ahmed et al., 2016); модели машинного обучения (ML) могут изучать закономерности для поддержки принятия решений фермерами (Mammarella et al., 2020; Shorewala et al., 2021). Эти датчики, объединенные с микроконтроллером, постоянно передающим данные, считаются частью Интернета вещей. Кроме того, данные могут обрабатываться на больших серверах, размещенных в облаке (облачные вычисления). Однако устройства IoT часто являются жестким решением, поскольку они размещаются в одном месте. Поэтому автономные роботизированные системы (Autonomous Robotic Systems, ARS) могут передвигаться по посевам, собирая данные со всего поля и предоставляя точную информацию (Ozdogan et al., 2017; Kamilaris and Prenafeta-Boldu, 2018). Эта комбинация датчиков, анализа данных и роботов предоставляет фермерам приложение «умного» сельского хозяйства с разнообразными инструментами для решения проблем, связанных с производительностью, воздействием на окружающую среду, безопасностью продуктов питания, потерями урожая и устойчивостью. Целями «умного» сельского хозяйства являются повышение урожайности, минимизация затрат и улучшение качества продукции с помощью использования современной системы (Araújo et al., 2021). В последние годы, с технологической эволюцией, были разработаны различные типы датчиков, которые позволяют собирать данные практически в любом месте, обеспечивая мониторинг сельскохозяйственных полей в реальном времени без прокладки проводов. Таким образом, тремя основными технологиями, вносящими значительный вклад в эту область, являются:
- Дроны: Это небольшие летающие роботы, обычно используемые для мониторинга посевов, осмотра продовольственной инфраструктуры, отслеживания цепочек поставок и контроля безопасности пищевых продуктов (Costa et al., 2021).
- Автономные тракторы: Это, как правило, наземные беспилотные транспортные средства (UGV), включающие датчики и исполнительные механизмы, обеспечивающие мониторинг посевов, ирригацию, сбор урожая и борьбу с болезнями (Lisbinski et al., 2020).
- Программное обеспечение для принятия решений: Это платформы, на которых визуализируются и анализируются данные, полученные с датчиков дронов и/или UGV. Они обычно предоставляют информацию о погоде, почве, урожайности и других факторах, важных для сельскохозяйственного производства, для улучшения принятия решений (Ojeda-Beltran, 2022).
3.2. Мобильная робототехника в сельском хозяйстве
Новым направлением в сельскохозяйственной мобильной робототехнике являются UGV и БПЛА (UAV) (Prakash et al., 2020). Основными применениями мобильной робототехники в сельском хозяйстве являются:
- Определение состояния посевов и соответствующее применение химических продуктов, фумигация или сбор урожая, в зависимости от потребностей плода или растения.
- Мобильная обработка с помощью коллаборативных манипуляторов (сбор урожая, обработка плодов).
- Сбор и преобразование полезной информации для фермера.
- Выборочное применение пестицидов и предотвращение порчи продуктов питания.
UGV и UAV имеют ограниченную доступную мощность. Поэтому их проектирование и оптимизация управления имеют первостепенное значение для их применения в «умном» сельском хозяйстве. Поэтому ведутся исследования по сотрудничеству между UGV и UAV для охвата больших сельскохозяйственных площадей. Эти автономные роботы представляют собой интеллектуальные машины, способные выполнять задачи, принимать решения и действовать в реальном времени с высокой степенью автономности (Rahmadian and Widyartono, 2020). Интерес к мобильной робототехнике в сельском хозяйстве значительно вырос за последние несколько лет благодаря ее способности автоматизировать такие задачи, как посев, ирригация, удобрение, опрыскивание, мониторинг окружающей среды, обнаружение болезней, сбор урожая, а также борьба с сорняками и вредителями (Araújo et al., 2021). Кроме того, мобильная робототехника в «умном» сельском хозяйстве использует комбинацию новых технологий для повышения производительности и качества сельскохозяйственной продукции (Bechar and Vigneault, 2016).
UGV – это роботы, управление которыми может быть дистанционным (управляемым человеком-оператором через интерфейс) или полностью автономным (работающим без участия человека-контролера на основе технологий ИИ) (Araújo et al., 2021). Основными компонентами UGV являются системы локомоции, манипуляции и супервизорного управления, датчики для навигации и каналы связи для обмена информацией между устройствами. Основными используемыми системами локомоции являются колеса, гусеницы или ноги. Для правильной работы UGV в полевых условиях они должны соответствовать требованиям по размеру, маневренности, эффективности, удобству для человека и безопасности. В Таблице 2 обобщен разнообразный спектр UGV, разработанных для сельскохозяйственных операций.
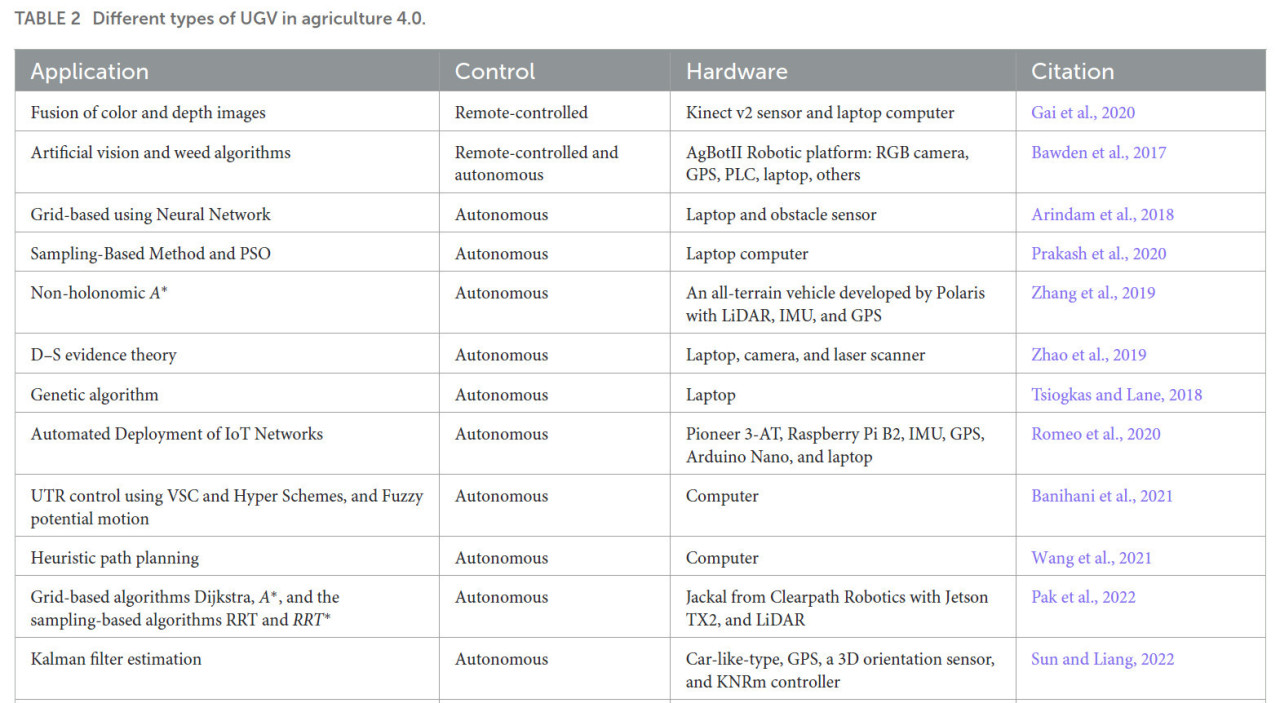
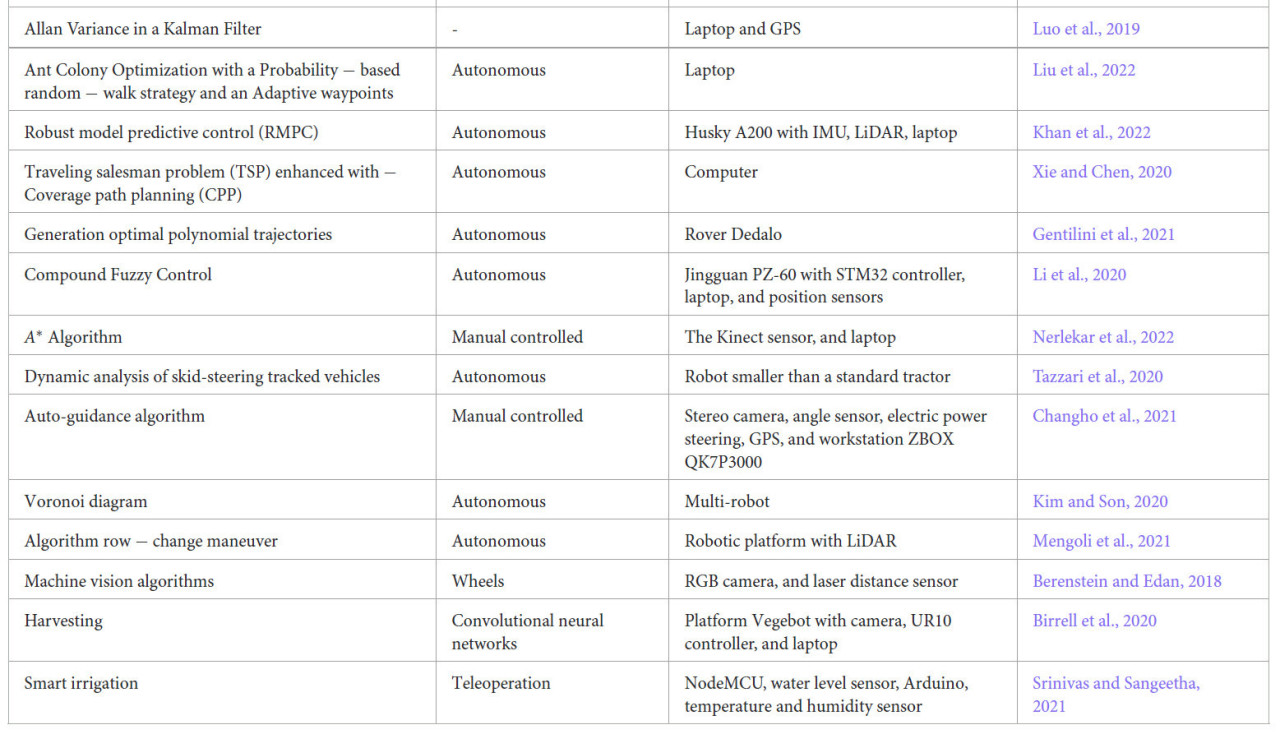
Таблица 2 – Различные типы UGV в сельском хозяйстве 4.0.
Основной проблемой мобильной робототехники на сельскохозяйственных полях является выполнение множества задач (обход препятствий, отслеживание, планирование маршрута, сбор данных о культурах, обнаружение болезней и других) в автономном режиме с использованием ограниченного аппаратного обеспечения для недорогих роботов, которые могут быть приобретены и внедрены фермерами. Большинство представленных выше UGV имеют колесную систему локомоции, обеспечивающую простоту конструкции и управления. Некоторые UGV включают недорогие системы компьютерного зрения, то есть используют обычные камеры. UGV могут использовать эвристические алгоритмы, все еще находящиеся на стадии концепции или прототипа. Из-за ограничений UGV и для охвата больших площадей за меньшее время в последние годы развивалось сотрудничество UGV-UAV (Khanna et al., 2015). UGV работает на участках, выбранных UAV, который также участвует в создании 3D-карт окружающей среды с сантиметровой точностью; однако объединение карт, созданных UAV и UGV, в сельскохозяйственных условиях является сложной задачей, поскольку создаваемые карты содержат неточности и ошибки масштаба из-за локальных несоответствий, пропущенных данных, окклюзий и глобальных деформаций (Gawel et al., 2017; Potena et al., 2019). В Таблице 3 рассмотрены некоторые виды сотрудничества между UGV и UAV в «умном» сельском хозяйстве.
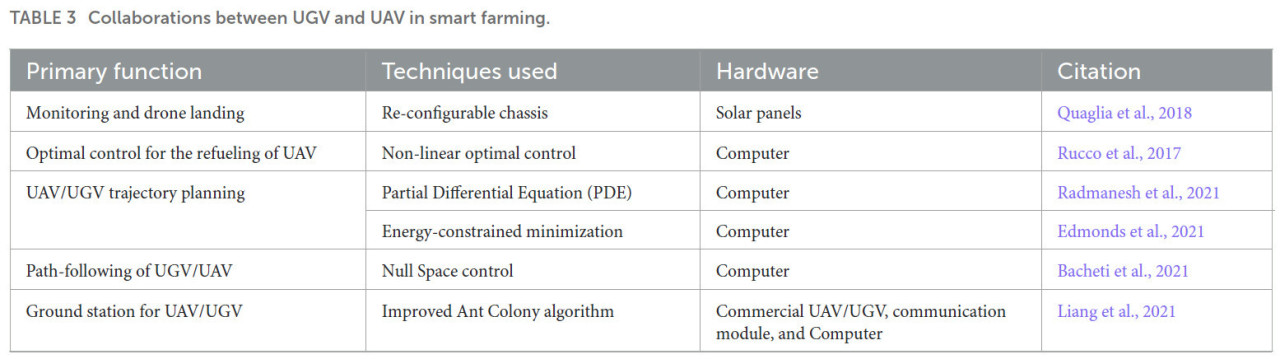
Таблица 3 – Сотрудничество между UGV и UAV в «умном» сельском хозяйстве.
Большинство систем сотрудничества между UAV и UGV находятся на концептуальной (симуляционной) фазе.
3.3. Многокритериальное управление в «умном» сельском хозяйстве
Сельскохозяйственные системы используют и производят энергию в форме биоэнергии и играют жизненно важную роль в мировой экономике и продовольственной безопасности. Современные сельскохозяйственные системы могут поэтому одновременно учитывать экономические, энергетические и экологические факторы (Banasik et al., 2017). Многокритериальное управление является важным инструментом в «умном» сельском хозяйстве для одновременного выполнения и оптимизации множества целей, таких как производительность, эффективность использования воды, качество продукции и экономическая рентабельность. Некоторые примеры многокритериального управления в «умном» сельском хозяйстве представлены в Таблице 4, которая показывает их основную функцию, методы управления и развернутое аппаратное обеспечение. Однако существует немного исследований, поскольку эта тема является новой в приложениях «умного» сельского хозяйства с мобильными роботами. Кроме того, планирование маршрута является важным приложением «умного» сельского хозяйства, которое фокусируется на оптимизации маршрутов и перемещений сельскохозяйственной техники для повышения эффективности и снижения производственных затрат (Nazarahari et al., 2019).
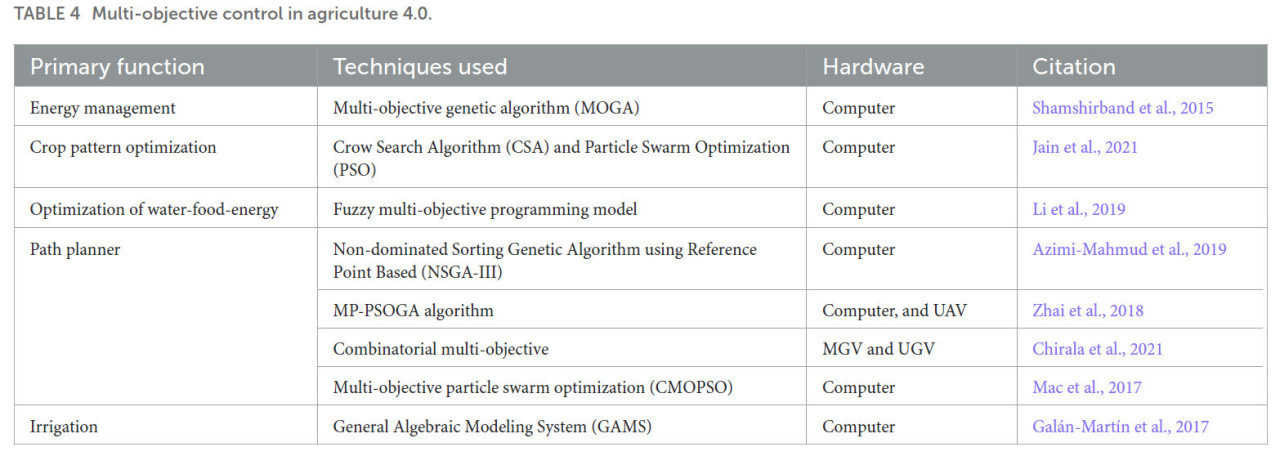
Таблица 4 – Многокритериальное управление в сельском хозяйстве 4.0.
Другим применением многокритериального управления в планировании маршрута является оптимизация внесения удобрений и пестицидов на посевы. Согласно исследованию Zhao et al. (2023), многокритериальное управление может оптимизировать маршруты машин для внесения пестицидов и удобрений, чтобы сократить количество используемых ресурсов и повысить эффективность внесения. Кроме того, многокритериальное управление может также улучшить качество продукции и снизить загрязнение окружающей среды за счет точного внесения ресурсов на посевы.
Наконец, в одном исследовании предлагается алгоритм Residual-like Soft Actor-Critic (R-SAC) для сельскохозяйственных сценариев для обеспечения безопасного обхода препятствий и интеллектуального планирования маршрута роботов. В исследовании также предлагается метод предварительного обучения на офлайн-экспертном опыте для повышения эффективности обучения с подкреплением. Эксперименты показывают, что этот метод демонстрирует стабильную производительность в статических и динамических средах с препятствиями и превосходит другие алгоритмы обучения с подкреплением (Yang et al., 2022).
4. Обсуждение
Основываясь на вышеизложенной информации о мобильных роботах в «умном» сельском хозяйстве, данный раздел ставит целью показать будущие шаги в этой области исследований, связанные с ее проблемами. Учитывая новые тенденции UGV и UAV в Таблице 2, многокритериальное управление еще не получило широкого распространения в приложениях «умного» сельского хозяйства. Это может быть связано со сложностью его настройки и дорогостоящими вычислительными ресурсами. Однако многокритериальные приложения могут стать осуществимыми в будущих роботах с развитием микроконтроллеров и микропроцессоров. И наоборот, устройства IoT, собирающие данные с ферм, широко развернуты в различных приложениях. Однако существуют новые проблемы, связанные с их конфиденциальностью и риском раскрытия данных при передаче по каналам связи (Pylianidis et al., 2021).
«Умному» сельскому хозяйству требуются конечные устройства с надежными системами, работающими в суровых условиях в полевых сценариях. Однако в ряде работ представлены прототипы с их пробными функциональными возможностями. Создание роботов может потребовать нескольких циклов отладки для решения проблем с аппаратным и программным обеспечением. Следовательно, поскольку робот связывает людей и растения, фермеры, считающиеся экспертами в «умном» сельском хозяйстве, должны тесно сотрудничать с разработчиком робота. Однако разнообразие видов растений и культур усложняет разработку многозадачного робота (Selmani et al., 2019).
Представлены основные проблемы и будущие исследования для внедрения «умного» сельского хозяйства. Настоящее исследование стремилось связать мобильную робототехнику с «умным» сельским хозяйством. Глядя на Таблицу 4, видно, что многокритериальное управление не было значительно исследовано в «умном» сельском хозяйстве. Одной из причин может быть то, что применение передовых технологий со сложными операциями может быть дорогостоящим. Следовательно, развитие этих технологий в «умном» сельском хозяйстве должно возрасти в ближайшие годы. Кроме того, Интернет вещей широко развернут в сельском хозяйстве для мониторинга и отслеживания посевов. Таким образом, можно сказать, что Интернет вещей является исследовательским трендом в «умном» сельском хозяйстве. Однако лишь несколько исследований рассмотрели безопасность и надежность данных, масштабируемость и совместимость при разработке системы «умного» сельского хозяйства (Pylianidis et al., 2021).
Представленные результаты также показывают, что большинство примеров использования находятся на стадии прототипа. Одной из возможных причин может быть то, что «умное» сельское хозяйство связывает людей, животных и растения, что делает его более сложным, чем создание систем для неживых объектов. Другой причиной может быть трансдисциплинарность этой области, и поэтому для разработки интеллектуальных систем фермеры должны быть знакомы с этими технологиями. Наконец, разнообразие видов растений и культур делает внедрение технологий на сельскохозяйственных полях сложным (Selmani et al., 2019). Результаты также показывают, что большинство разработанных систем предназначены для ферм со свободным выпасом. Кроме того, также очевидно, что исследования ограничиваются управлением почвой, обнаружением плодов и управлением качеством урожая. Таким образом, подтверждается, что необходимо работать над исследованиями и разработкой систем, обеспечивающих внедрение «умного» сельского хозяйства по доступным ценам. Естественная сложность сельскохозяйственных полей создает ряд препятствий, препятствующих полной интеграции мобильной робототехники в «умное» сельское хозяйство. Поэтому на основе анализа были выявлены и классифицированы блокировки на техническом и социально-экономическом уровнях.
4.1. Технические препятствия
- Совместимость. Для установления эффективной связи между разнородными устройствами они должны быть взаимосвязаны и совместимы (Aydin and Aydin, 2020).
- Качество данных. Отсутствие децентрализованных систем препятствует внедрению «умного» сельского хозяйства (Liu et al., 2022).
- Аппаратное обеспечение. Должен быть сконструирован подходящий корпус, достаточно прочный и долговечный, чтобы выдерживать реальные полевые условия (Villa-Henriksen et al., 2020).
- Источники питания. Необходима надлежащая схема энергосбережения, поскольку мгновенная замена батарей затруднена. Возможным решением для оптимизации энергопотребления является использование маломощного аппаратного обеспечения и надлежащее управление связью (Jawad et al., 2017).
- Беспроводные архитектуры. Беспроводные сети и технологии связи предлагают ряд преимуществ с точки зрения низкой стоимости, широкого покрытия, гибкости сети и высокой масштабируемости (Brinis and Saidane, 2016).
- Безопасность. Природа сельскохозяйственных полей создает риски для конфиденциальности, целостности и доступности данных (Chen et al., 2017).
- Пользовательский интерфейс. Большинство графических пользовательских интерфейсов разработаны так, что только эксперты могут их использовать (Del Cerro et al., 2021).
4.2. Социально-экономические препятствия
- Затраты. Затраты, связанные с внедрением робототехнических технологий и систем, являются самым большим недостатком при внедрении «умного» сельского хозяйства (Sinha and Dhanalakshmi, 2022).
- Окупаемость инвестиций. При внедрении новых технологий фермеры обеспокоены сроком окупаемости и трудностями оценки выгод (Miranda et al., 2019).
- Разрыв между фермерами и исследователями. Участие фермеров имеет первостепенное значение для успеха «умного» сельского хозяйства. Фермеры сталкиваются со многими проблемами в процессе производства, которые могли бы быть решены с помощью технологий (Bacco et al., 2019).
Наконец, в работе Charatsari et al. (2022) обсуждается важность ответственности в процессе технологических инноваций в агропродовольственной отрасли. Подчеркивается необходимость учитывать не только технические аспекты, но и социальные последствия и общественные ценности при внедрении инновационных технологий. Авторы утверждают, что восприятие ответственных инноваций ограничено в различных промышленных секторах, что затрудняет внедрение подходов ответственных инноваций. Сложность ответственных инноваций в агропродовольственной отрасли требует решения множества уровней и масштабов взаимодействия между участниками и постоянной эволюции агропродовольственных систем. Поэтому в статье подчеркивается необходимость внедрения практик ответственных инноваций, учитывающих социальные, этические и экологические последствия технологических инноваций в отрасли.
5. Будущие тенденции
Предстоящие инициативы, связанные с использованием роботов, представляют значительные улучшения в «умном» сельском хозяйстве. Государственные инициативы, государственно-частные секторы и исследовательская работа в этой области могут способствовать созданию надлежащих условий для добавления нового аппаратного обеспечения на посевы. Однако существуют некоторые проблемы, которые необходимо учитывать при разработке мобильных роботов в сельском хозяйстве, такие как: навигация по пересеченной местности (рыхлая почва и непредсказуемые препятствия) без повреждения растений или без ущерба для собственной безопасности, энергоэффективность для обеспечения длительной работы без необходимости постоянного вмешательства человека, манипуляция культурами, интеграция с системами управления фермой и адаптируемость к различным культурам и условиям.
Например, может быть разработана роботизированная система для «умного» сельского хозяйства, начиная с базовой архитектуры с небольшим количеством компонентов и простой функциональностью, что позволяет постепенно добавлять функции и возможности для создания сложной системы. Будущие тенденции в «умном» сельском хозяйстве включают использование алгоритмов многокритериального управления и искусственного интеллекта в недорогих мобильных роботах для планирования оптимальной траектории с учетом энергоэффективности, типа почвы и препятствий, а также для мониторинга роста культур, оценки и контроля болезней и вредителей растений. Для обеспечения хорошей связности и живой передачи данных о посевах необходимо широкое внедрение технологии 5G. Технология 5G минимизирует затраты на интернет и повышает эффективность управления информацией за счет удаленного проведения точных инспекций сельскохозяйственных полей (Abbasi et al., 2021). Наконец, блокчейн в сочетании с Интернетом вещей и другими технологиями должен применяться для решения проблемы конфиденциальности и безопасности информации (Bermeo-Almeida et al., 2018).
Как видно из таблиц в предыдущих разделах, большинство UGV имеют компьютер, что увеличивает стоимость таких роботов. В Таблице 5 представлены несколько современных плат, которые могли бы обеспечить внедрение «умного» сельского хозяйства по доступным для фермеров ценам.

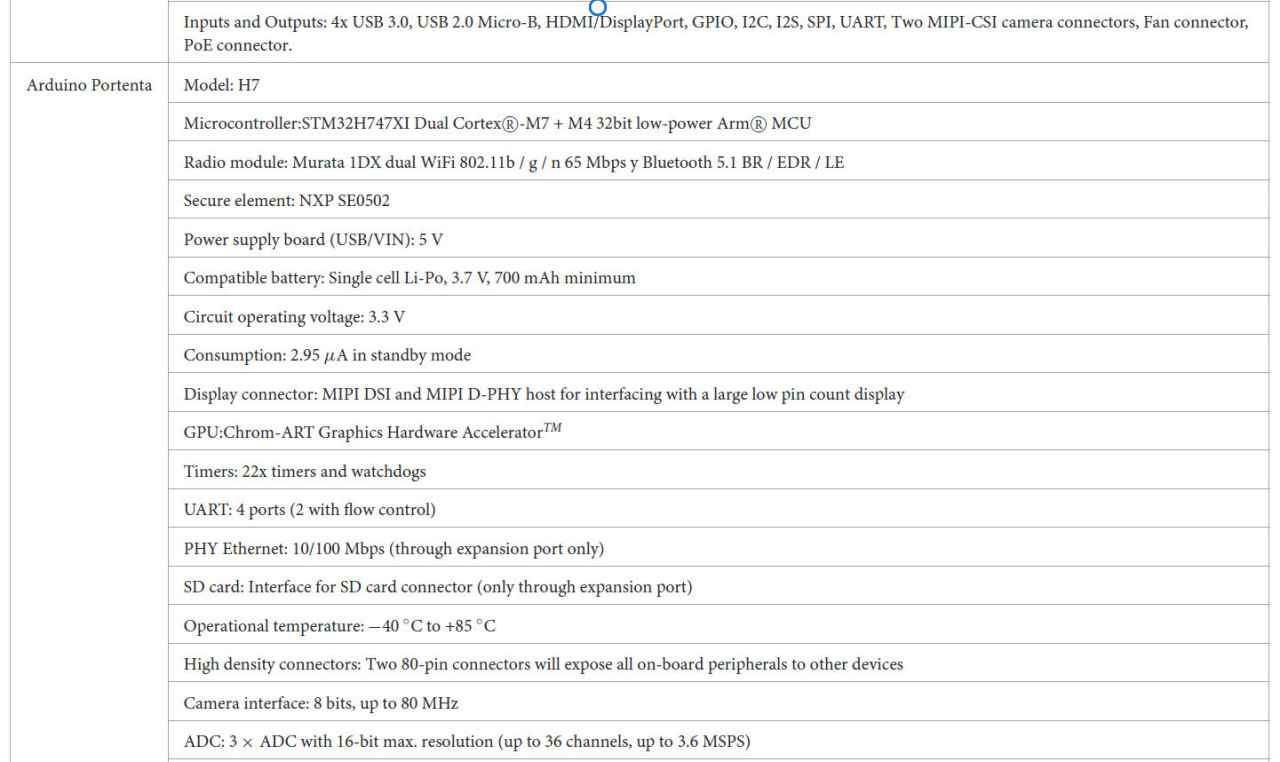

Таблица 5 – Платы для сельского хозяйства 4.0.
Наконец, на Рисунке 4 мы можем видеть будущее сельского хозяйства, для которого необходимы правильное развертывание сети 5G и планирование/отслеживание маршрута. Искусственный интеллект, машинное обучение, машинное зрение, Интернет вещей и облачные вычисления необходимы в каждой из видов деятельности, выполняемых на сельскохозяйственных полях.

Рисунок 4 – Будущее сельского хозяйства.
6. Выводы
Растущая обеспокоенность по поводу глобальной продовольственной безопасности ускорила необходимость внедрения мобильных роботов в сельское хозяйство. Научное сообщество и исследователи интегрируют прорывные технологии в традиционные сельскохозяйственные системы для повышения качества и урожайности культур, минимизации затрат и сокращения образования отходов. В данной статье анализируется текущее состояние и проблемы «умного» сельского хозяйства. Учитывая влияние сельского хозяйства на изменение климата и производство здоровой пищи, жизненно важно обеспечить сельскохозяйственный сектор недорогими и функциональными мобильными роботами. Были поставлены и даны ответы на исследовательские вопросы относительно использования мобильной робототехники в сельском хозяйстве, технологий, методов и инструментов, используемых на сельскохозяйственных полях, а также основных проблем многокритериального управления в этой области. Был сделан ряд выводов, таких как интеграция масштабируемых мобильных роботов с включением эффективных систем. Следует отметить, что большинство случаев рассматривают конкретную проблему и находятся на стадии прототипа.
Из проведенного SLR было выявлено, что исследования по следующим темам ограничены:
- Внедрение цифровых двойников для роботизированных производственных линий.
- Разработка программных проектов с учетом минимизации воздействия.
- Блокчейн в сельском хозяйстве.
- Контекстно-зависимая беспроводная сенсорная сеть, подходящая для точного земледелия.
- Интернет вещей для «умного» точного земледелия и фермерства в сельских районах.
- Семантическая и синтаксическая совместимость для сельскохозяйственных открытых платформ данных в контексте Интернета вещей с использованием специфических для культур признаков.
- Планировщик многокритериального маршрута для сельскохозяйственного мобильного робота в виртуальной и реальной тепличной среде.
- Замыкание циклов в сельскохозяйственных цепочках поставок с использованием многокритериальной оптимизации.
- Новые подходы к управлению для отслеживания траектории и планирования движения беспилотных гусеничных роботов.
Эти области требуют дальнейших исследований для повышения эффективности и результативности точного земледелия. Аналогично, информация, собранная в этой статье, делает очевидным, что новыми областями исследований являются:
- Автономная навигация. Планирование, отслеживание траекторий и планирование задач должны учитываться в этой области.
- Энергоэффективность. Необходимо учитывать не только хорошую навигационную автономию, но также конструкцию и все компоненты, составляющие мобильного робота, поскольку его размер и стоимость напрямую влияют на внедрение «умного» сельского хозяйства.
- Связь. Из-за количества устройств, задействованных в «умном» сельском хозяйстве, важна промежуточная связь, улучшающая взаимодействие между полевыми устройствами и станцией, для обеспечения надежности и безопасности информации.
Взаимозависимость этих проблем означает, что необходимо искать практическое решение с надлежащим компромиссом между теоретически оптимальным маршрутом, облегчающим обмен информацией, и общей оптимизацией энергии системы. Кроме того, необходимо учитывать следующие вопросы: кинематическое и динамическое проектирование мобильного робота, проходимость местности, вычислительная сложность различных алгоритмов для обеспечения производительности в реальном времени, использование датчиков и плат управления с низким энергопотреблением, а также отправка и получение информации. В статье также определяются основные технические и социально-экономические препятствия, которые необходимо преодолеть для успешного внедрения «умного» сельского хозяйства. Мы видим, что в этой области достигнут значительный прогресс, но предстоит еще долгий путь, чтобы смягчить воздействие сельского хозяйства на окружающую среду в ближайшие годы. Наконец, одной из областей, подлежащих исследованию, является многокритериальная эвристическая оптимизация для автономной навигации, связи и энергоэффективности мобильных роботов.
Наконец, многочисленные международные политические организации играют решающую роль в распространении осведомленности о технологиях, используемых в точном земледелии, и выступают за их успешное внедрение. Этими организациями являются:
- ФАО способствует использованию передовых сельскохозяйственных технологий через программы и проекты, предоставляя техническую помощь, обучение и доступ к ресурсам для фермеров.
- Европейский союз (ЕС) поддерживает модернизацию сельского хозяйства и внедрение инновационных технологий в отрасли через свою Общую сельскохозяйственную политику (ОСП). Кроме того, ЕС финансирует проекты исследований и разработок в области точного земледелия, сельскохозяйственной робототехники и цифровых решений для повышения эффективности и устойчивости.
- Министерство сельского хозяйства США (USDA) уделяет внимание внедрению передовых сельскохозяйственных технологий. USDA поддерживает внедрение систем точного земледелия, интеграцию датчиков и устройств Интернета вещей в сельскохозяйственные операции, а также продвижение цифровизации в отрасли через свою программу финансирования и грантов.
- Основное внимание AGRA уделяется поощрению использования современных сельскохозяйственных технологий на африканском континенте. AGRA работает в тесном партнерстве с правительствами, региональными организациями и частным сектором для расширения доступа к улучшенным семенам, удобрениям и цифровым фермерским технологиям, которые повышают сельскохозяйственную производительность и устойчивость.
- Всемирный экономический форум (ВЭФ) создал инициативы и проекты для продвижения точного земледелия. ВЭФ объединяет множество участников, включая политических лидеров, руководителей бизнеса и членов гражданского общества, через свою платформу «Формирование будущего продовольственной безопасности и сельского хозяйства» для разработки инновационных и совместных решений, способствующих цифровой трансформации сельского хозяйства.
Эти политические организации играют решающую роль в распространении передовых сельскохозяйственных технологий и активно работают над продвижением внедрения «сельского хозяйства 4.0» в глобальном масштабе с целью повышения эффективности, производительности и устойчивости сельскохозяйственного сектора.
Ссылки
1. Abbasi R., Yanes A. R., Villanuera E. M., Ahmad R. (2021). "Real-time implementation of digital twin for robot based production line," in Proceedings of the Conference on Learning Factories (CLF) (Elsevier), 55–60. CrossRef. Google Scholar.
2. Ahmed M. A., Ahsan I., Abbas M. (2016). "Systematic literature review: ingenious software project management while narrowing the impact aspect," in Proceedings of the International Conference on Research in Adaptive and Convergent Systems, RACS '16 (New York, NY: Association for Computing Machinery), 165–168. Google Scholar.
3. Ahmed N., De D., Hussain I. (2018). Internet of things (IoT) for smart precision agriculture and farming in rural areas. IEEE Internet Things J. 5, 4890–4899. doi: 10.1109/JIOT.2018.2879579. CrossRef. Google Scholar.
4. Araújo S. O., Peres R. S., Barata J., Lidon F., Ramalho J. C. (2021). Characterising the agriculture 4.0 landscape—emerging trends, challenges and opportunities. Agronomy 11, 1–37. doi: 10.3390/agronomy11040667. CrossRef. Google Scholar.
5. Arindam S., Anjan K. R., Arun-Baran S. (2018). "Grid-based UGV navigation in a dynamic environment using neural network," in 2018 International Conference on Inventive Research in Computing Applications (ICIRCA), 509–514. doi: 10.1109/ICIRCA.2018.8597389. CrossRef. Google Scholar.
6. Aydin S., Aydin M. N. (2020). Semantic and syntactic interoperability for agricultural open-data platforms in the context of IoT using crop-specific trait ontologies. Appl. Sci. 10, 1–27. doi: 10.3390/app10134460. CrossRef. Google Scholar.
7. Azimi-Mahmud M. S., Zainal-Abidin M. S., Mohamed Z., Iida M. (2019). Multi-objective path planner for an agricultural mobile robot in a virtual greenhouse environment. Comput. Electron. Agric. 157, 488–499. doi: 10.1016/j.compag.2019.01.016. CrossRef. Google Scholar.
8. Bacco M., Barsocchi P., Ferro E., Gotta A., Ruggeri M. (2019). The digitisation of agriculture: a survey of research activities on smart farming. Array 3, 100009. doi: 10.1016/j.array.2019.100009. CrossRef. Google Scholar.
9. Bacheti V. P., Brandao A. S., Sarcinelli-Filho M. (2021). "Path-following by a UGV-UAV formation based on null space," in 14th IEEE International Conference on Industry Applications (INDUSCON), 1266–1273. doi: 10.1109/INDUSCON51756.2021.9529472. CrossRef. Google Scholar.
10. Banasik A., Kanellopoulos A., Claassen G., Bloemhof-Ruwaard J. (2017). Closing loops in agricultural supply chains using multi-objective optimization: a case study of an industrial mushroom supply chain. Int. J. Product. Econ. 183, 409–420. doi: 10.1016/j.ijpe.2016.08.012. CrossRef. Google Scholar.
11. Banihani S., Hayajneh M., Al-Jarrah A., Mutawe S. (2021). New control approaches for trajectory tracking and motion planning of unmanned tracked robot. Adv. Electric. Electron. Eng. 19, 42–56. doi: 10.15598/aeee.v19i1.4006. CrossRef. Google Scholar.
12. Bawden O., Kulk J., Russell R., McCool C., English A., Dayoub F., et al. (2017). Robot for weed species plant-specific management. J. Field Robot. 34, 1179–1199. doi: 10.1002/rob.21727. CrossRef. Google Scholar.
13. Bechar A., Vigneault C. (2016). Agricultural robots for field operations: concepts and components. Biosyst. Eng. 149, 94–111. doi: 10.1016/j.biosystemseng.2016.06.014. CrossRef. Google Scholar.
14. Belhadi A., Kamble S. S., Mani V., Benkhati I., Touriki F. E. (2021). An ensemble machine learning approach for forecasting credit risk of agricultural SMEs' investments in agriculture 4.0 through supply chain finance. Ann. Operat. Res. 1–29. doi: 10.1007/s10479-021-04366-9. CrossRef. Google Scholar.
15. Berenstein R., Edan Y. (2018). Automatic adjustable spraying device for site-specific agricultural application. IEEE Trans. Automat. Sci. Eng. 15, 641–650. doi: 10.1109/TASE.2017.2656143. CrossRef. Google Scholar.
16. Bermeo-Almeida O., Cardenas-Rodriguez M., Samaniego-Cobo T., Ferruzola-Gómez E., Cabezas-Cabezas R., Bazán-Vera W. (2018). "Blockchain in agriculture: a systematic literature review," in International Conference on Technologies and Innovation (Cham: Springer International Publishing), 44–56. Google Scholar.
17. Birrell S., Hughes J., Cai J. Y., Lida F. (2020). A field-tested robotic harvesting system for iceberg lettuce. J. Field Robot. 37, 225–245. doi: 10.1002/rob.21888. CrossRef. Google Scholar.
18. Botta A., Cavallone P., Baglieri L., Colucci G., Tagliavini L., Quaglia G. (2022). A review of robots, perception, and tasks in precision agriculture. Appl. Mech. 3, 830–854. doi: 10.3390/applmech3030049. CrossRef. Google Scholar.
19. Brinis N., Saidane L. A. (2016). Context aware wireless sensor network suitable for precision agriculture. Wireless Sensor Netw. 8, 1–12. doi: 10.4236/wsn.2016.81001. CrossRef. Google Scholar.
20. Changho Y., Hak-Jin K., Chan-Woo J., Minseok G., Won S. L., Jong G. H. (2021). Stereovision-based ridge-furrow detection and tracking for auto-guided cultivator. Comput. Electron. Agric. 191, 106490. doi: 10.1016/j.compag.2021.106490. CrossRef. Google Scholar.
21. Charatsari C., Lioutas E. D., De Rosa M., Vecchio Y. (2022). Technological innovation and agrifood systems resilience: the potential and perils of three different strategies. Front. Sustain. Food Syst. 6, 872706. doi: 10.3389/fsufs.2022.872706. CrossRef. Google Scholar.
22. Chen L., Thombre S., Jarvinen K., Lohan E. S., Alén-Savikko A., Leppakoski H., Bhuiyan M. Z. H., et al. (2017). Robustness, security and privacy in location-based services for future IoT: a survey. IEEE Access 5, 8956–8977. doi: 10.1109/ACCESS.2017.2695525. CrossRef. Google Scholar.
23. Chirala V. S., Venkatachalam S., Smereka J. M., Kassoumeh S. (2021). A multi-objective optimization approach for multi-vehicle path planning problems considering human-robot interactions. J. Auton. Vehicles Syst. 1, 041002. doi: 10.1115/1.4053426. CrossRef. Google Scholar.
24. Costa E., Martins M. B., Vendruscolo E. P., Silva A. G., Zoz T., Binotti F. F. S., et al. (2021). Greenhouses within the agricultura 4.0 interface. Revista Ciência Agronômica 51, e20207703. doi: 10.5935/1806-6690.20200089. CrossRef. Google Scholar.
25. Del Cerro J., Cruz-Ulloa C., Barrientos A., De León-Rivas J. (2021). Unmanned aerial vehicles in agriculture: a survey. Agronomy 11, 1–19. doi: 10.3390/agronomy11020203. CrossRef. Google Scholar.
26. Dhumale N. R., Bhaskar P. C. (2021). "Smart agricultural robot for spraying pesticide with image processing based disease classification technique," in *2021 International Conference on Emerging Smart Computing and Informatics, ESCI 2021*, 604–609. doi: 10.1109/ESCI50559.2021.9396959. CrossRef. Google Scholar.
27. Dutta A., Roy S., Kreidl O. P., Bölöni L. (2021). Multi-robot information gathering for precision agriculture: current state, scope, and challenges. IEEE Access 9, 161416–161430. doi: 10.1109/ACCESS.2021.3130900. CrossRef. Google Scholar.
28. Edmonds M., Yigit T., Yi J. (2021). "Resolution-optimal, energy-constrained mission planning for unmanned aerial/ground crop inspections," in IEEE 17th International Conference on Automation Science and Engineering (CASE), 2235–2240. Google Scholar.
29. Ferrag M. A., Shu L., Djallel H., Choo K.-K. R. (2021). Deep learning-based intrusion detection for distributed denial of service attack in agriculture 4.0. Electronics 10, 1257. doi: 10.3390/electronics10111257. CrossRef. Google Scholar.
30. Gai J., Tang L., Steward B. L. (2020). Automated crop plant detection based on the fusion of color and depth images for robotic weed control. J. Field Robot. 37, 35–52. doi: 10.1002/rob.21897. CrossRef. Google Scholar.
31. Galán-Martín A., Vaskan P., Antón A., Jiménez-Esteller L., Guillén-Gosálbez G. (2017). Multi-objective optimization of rainfed and irrigated agricultural areas considering production and environmental criteria: a case study of wheat production in Spain. J. Clean. Product. 140, 816–830. doi: 10.1016/j.jclepro.2016.06.099. CrossRef. Google Scholar.
32. Gawel A., Dubé R., Surmann H., Nieto J. I., Siegwart R. Y., Cadena C. (2017). "3D registration of aerial and ground robots for disaster response: an evaluation of features, descriptors, and transformation estimation," in IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR), 27–34. doi: 10.1109/SSRR.2017.8088136. CrossRef. Google Scholar.
33. Gentilini L., Rossi S., Mengoli D., Eusebi A., Marconi L. (2021). "Trajectory planning ROS service for an autonomous agricultural robot," in 2021 IEEE International Workshop on Metrology for Agriculture and Forestry (MetroAgriFor), 384–389. doi: 10.1109/MetroAgriFor52389.2021.9628620. CrossRef. Google Scholar.
34. International Federation of Robotics (2021). World Robotics 2021. Google Scholar.
35. Jain S., Ramesh D., Bhattacharya D. (2021). A multi-objective algorithm for crop pattern optimization in agriculture. Appl. Soft Comput. 112, 107772. doi: 10.1016/j.asoc.2021.107772. CrossRef. Google Scholar.
36. Jawad H. M., Nordin R., Gharghan S. K., Jawad A. M., Ismail M. (2017). Energy-efficient wireless sensor networks for precision agriculture: a review. Sensors 17, 1–45. doi: 10.3390/s17081781. CrossRef. Google Scholar.
37. Kamilaris A., Prenafeta-Boldu F. X. (2018). A review of the use of convolutional neural networks in agriculture. J. Agric. Sci. 156, 312–322. doi: 10.1017/S0021859618000436. CrossRef. Google Scholar.
38. Khan N., Ray R. L., Sargani G. R., Ihtisham M., Khayyam M., Ismail S. (2021). Current progress and future prospects of agriculture technology: Gateway to sustainable agriculture. Sustainability 13, 1–31. doi: 10.3390/su13094883. CrossRef. Google Scholar.
39. Khan S., Guivant J., Li X. (2022). Design and experimental validation of a robust model predictive control for the optimal trajectory tracking of a small-scale autonomous bulldozer. Robot. Auton. Syst. 147, 103903. doi: 10.1016/j.robot.2021.103903. CrossRef. Google Scholar.
40. Khanna R., Möller M., Pfeifer J., Liebisch F., Walter A., Siegwart R. (2015). "Beyond point clouds - 3D mapping and field parameter measurements using UAVs," in IEEE 20th Conference on Emerging Technologies Factory Automation (ETFA), 1–4. Google Scholar.
41. Kim J., Son H. I. (2020). A voronoi diagram-based workspace partition for weak cooperation of multi-robot system in orchard. IEEE Access 8, 20676–20686. doi: 10.1109/ACCESS.2020.2969449. CrossRef. Google Scholar.
42. Li M., Fu Q., Singh V. P., Liu D., Li T. (2019). Stochastic multi-objective modeling for optimization of water-food-energy nexus of irrigated agriculture. Adv. Water Resour. 127, 209–224. doi: 10.1016/j.advwatres.2019.03.015. CrossRef. Google Scholar.
43. Li Y., Yu J., Guo X., Sun J. (2020). "Path tracking method of unmanned agricultural vehicle based on compound fuzzy control," in 2020 IEEE 9th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), 1301–1305. doi: 10.1109/ITAIC49862.2020.9338981. CrossRef. Google Scholar.
44. Liang X., Zhao S., Chen G., Meng G., Wang Y. (2021). Design and development of ground station for UAV/UGV heterogeneous collaborative system. Ain Shams Eng. J. 12, 3879–3889. doi: 10.1016/j.asej.2021.04.025. CrossRef. Google Scholar.
45. Lisbinski F. C., Mühl D. D., Oliveira L. d., Coronel D. A. (2020). Perspectivas e desafios da agricultura 4.0 para o setor agrícola. Anais. [do] VIII Simpósio da Ciência do Agronegócio, 422–433. Google Scholar.
46. Liu J., Anavatti S., Garratt M., Abbass H. A. (2022). Modified continuous ant colony optimisation for multiple unmanned ground vehicle path planning. Expert Syst. Appl. 196, 116605. doi: 10.1016/j.eswa.2022.116605. CrossRef. Google Scholar.
47. Lohchab V., Kumar M., Suryan G., Gautam V., Das R. K. (2018). "A review of IoT based smart farm monitoring," in 2018 Second International Conference on Inventive Communication and Computational Technologies (ICICCT), 1620–1625. Google Scholar.
48. Luo Y., Li J., Yu C., Xu B., Li Y., Hsu L.-T., et al. (2019). Research on time-correlated errors using allan variance in a Kalman filter applicable to vector-tracking-based GNSS software-defined receiver for autonomous ground vehicle navigation. Remote Sens. 11, 1–39. doi: 10.3390/rs11091026. CrossRef. Google Scholar.
49. Mac T. T., Copot C., Tran D. T., De Keyser R. (2017). A hierarchical global path planning approach for mobile robots based on multi-objective particle swarm optimization. Appl. Soft Comput. 59, 68–76. doi: 10.1016/j.asoc.2017.05.012. CrossRef. Google Scholar.
50. Mammarella M., Comba L., Biglia A., Dabbene F., Gay P. (2020). "Cooperative agricultural operations of aerial and ground unmanned vehicles," in 2020 IEEE International Workshop on Metrology for Agriculture and Forestry (MetroAgriFor), 224–229. Google Scholar.
51. Megeto G. A. S., Silva A. G., Bulgarelli R. F., Bublitz C. F., Valente A. C., Costa D. A. G. (2021). Artificial intelligence applications in the agriculture 4.0. Revista Ciência Agronômica 51, e20207701. doi: 10.5935/1806-6690.20200084. CrossRef. Google Scholar.
52. Mengoli D., Eusebi A., Rossi S., Tazzari R., Marconi L. (2021). "Robust autonomous row-change maneuvers for agricultural robotic platform," in 2021 IEEE International Workshop on Metrology for Agriculture and Forestry (MetroAgriFor), 390–395. Google Scholar.
53. Miranda J., Ponce P., Molina A., Wright P. (2019). Sensing, smart and sustainable technologies for Agri-Food 4.0. Comput. Industry 108, 21–36. doi: 10.1016/j.compind.2019.02.002. CrossRef. Google Scholar.
54. Mooney P. (2020). La insostenible agricultura 4.0 digitalización y poder corporativo en la cadena alimentaria. Google Scholar.
55. Mostari A., Benabdeli K., Ferah T. (2021). Assessment of the impact of urbanisation on agricultural and forest areas in the coastal zone of Mostaganem (Western Algeria). Ekologia 40, 230–239. doi: 10.2478/eko-2021-0025. CrossRef. Google Scholar.
56. Nazarahari M., Khanmirza E., Doostie S. (2019). Multi-objective multi-robot path planning in continuous environment using an enhanced genetic algorithm. Expert Syst. Appl. 115, 106–120. doi: 10.1016/j.eswa.2018.08.008. CrossRef. Google Scholar.
57. Nerlekar V., Mamtura T., Parihar S. (2022). "Implementation of A* algorithm for optimal path planning for mobile robots," in 2022 4th International Conference on Smart Systems and Inventive Technology (ICSSIT), 382–390. doi: 10.1109/ICSSIT53264.2022.971649. CrossRef. Google Scholar.
58. Ojeda-Beltran A. (2022). Plataformas tecnologicas en la agricultura 4.0: una mirada al desarrollo en colombia. Comput. Electron. Sci. Theory Appl. 3, 9–18. doi: 10.17981/cesta.03.01.2022.02. CrossRef. Google Scholar.
59. Ozdogan B., Gacar A., Aktas H. (2017). Digital agriculture practices in the context of agriculture 4.0. JEFA 4, 184–191. doi: 10.17261/Pressacademia.2017.448. CrossRef. Google Scholar.
60. Page M. J., McKenzie J. E., Bossuyt P. M., Boutron I., Hoffmann T. C., Mulrow C. D., et al. (2021). Declaración PRISMA 2020: una guía actualizada para la publicación de revisiones sistemáticas. Revista Española de Cardiología 74, 790–799. doi: 10.1016/j.rec.2021.07.010. CrossRef. Google Scholar.
61. Pak J., Kim J., Park Y., Son H. I. (2022). Field evaluation of path-planning algorithms for autonomous mobile robot in smart farms. IEEE Access 10, 60253–60266. doi: 10.1109/ACCESS.2022.3181131. CrossRef. Google Scholar.
62. Potena C., Khanna R., Nieto J., Siegwart R., Nardi D., Pretto A. (2019). AgriColMap: aerial-ground collaborative 3D mapping for precision farming. IEEE Robot. Automat. Lett. 4, 1085–1092. doi: 10.1109/LRA.2019.2894468. CrossRef. Google Scholar.
63. Prakash R., Dheer D. K., Kumar M. (2020). "Path planning of UGV using sampling-based method and PSO in 2D map configuration: a comparative analysis," in 2020 International Conference on Emerging Frontiers in Electrical and Electronic Technologies (ICEFEET), 1–6. Google Scholar.
64. Pylianidis C., Osinga S., Athanasiadis L. N. (2021). Introducing digital twins to agriculture. Comput. Electron. Agric. 184, 105942. doi: 10.1016/j.compag.2020.105942. CrossRef. Google Scholar.
65. Quaglia G., Cavallone P., Visconte C. (2018). "Agri_q: agriculture UGV for monitoring and drone landing," in IFToMM Symposium on Mechanism Design for Robotics (Cham: Springer International Publishing), 413–423. Google Scholar.
66. Radmanesh M., Sharma B., Kumar M., French D. (2021). PDE solution to UAV/UGV trajectory planning problem by spatio-temporal estimation during wildfires. Chin. J. Aeronaut. 34, 601–616. doi: 10.1016/j.cja.2020.11.002. CrossRef. Google Scholar.
67. Rahmadian R., Widyartono M. (2020). "Autonomous robotic in agriculture: a review," in 2020 Third International Conference on Vocational Education and Electrical Engineering (ICVEE) (IEEE), 1–6. doi: 10.1109/ICVEE50212.2020.9243253. CrossRef. Google Scholar.
68. Raj M., Gupta S., Chamola V., Elhence A., Garg T., Atiquzzaman M., et al. (2021). A survey on the role of internet of things for adopting and promoting agriculture 4.0. J. Netw. Comput. Appl. 187, 103107. doi: 10.1016/j.jnca.2021.103107. CrossRef. Google Scholar.
69. Rajeshwari T., Vardhini P. H., Reddy K. M. K., Priya K. K., Sreeja K. (2021). "Smart agriculture implementation using IoT and leaf disease detection using logistic regression," in 2021 4th International Conference on Recent Developments in Control, Automation & Power Engineering (RDCAPE) (IEEE), 619–623. doi: 10.1109/RDCAPE52977.2021.9633608. CrossRef. Google Scholar.
70. Ratnaparkhi S., Khan S., Arya C., Khapre S., Singh P., Diwakar M., et al. (2020). "Withdrawn: smart agriculture sensors in IoT: a review," in Materials Today: Proceedings. Google Scholar.
71. Romeo L., Petitti A., Colella R., Valecce G., Boccadoro P., Milella A., et al. (2020). "Automated deployment of IoT networks in outdoor scenarios using an unmanned ground vehicle," in 2020 IEEE International Conference on Industrial Technology (ICIT) (IEEE), 369–374. doi: 10.1109/ICIT45562.2020.9067099. CrossRef. Google Scholar.
72. Rucco A., Sujit P., Aguiar A. P., De Sousa J. B., Pereira F. L. (2017). Optimal rendezvous trajectory for unmanned aerial-ground vehicles. IEEE Trans. Aerospace Electron. Syst. 54, 834–847. doi: 10.1109/TAES.2017.2767958. CrossRef. Google Scholar.
73. Ryan S. J., Carlson C. J., Tesla B., Bonds M. H., Ngonghala C. N., Mordecai E. A., et al. (2021). Warming temperatures could expose more than 1.3 billion new people to Zika virus risk by 2050. Glob. Change Biol. 27, 84–93. doi: 10.1111/gcb.15384. CrossRef. Google Scholar.
74. Selmani A., Oubehar H., Outanoute M., Ed-Dahhak A., Guerbaoui M., Lachhab A., et al. (2019). Agricultural cyber-physical system enabled for remote management of solar-powered precision irrigation. Biosyst. Eng. 177, 18–30. doi: 10.1016/j.biosystemseng.2018.06.007. CrossRef. Google Scholar.
75. Shafi U., Mumtaz R., García-Nieto J., Hassan S. A., Zaidi S. A. R., Iqbal N. (2019). Precision agriculture techniques and practices: from considerations to applications. Sensors 19, 1–25. doi: 10.3390/s19173796. CrossRef. Google Scholar.
76. Shamshirband S., Khoshnevisan B., Yousefi M., Bolandnazar E., Anuar N. B., Wahid A., et al. (2015). A multi-objective evolutionary algorithm for energy management of agricultural systems—A case study in Iran. Renew. Sustain. Energy Rev. 44, 457–465. doi: 10.1016/j.rser.2014.12.038. CrossRef. Google Scholar.
77. Sharma A., Jain A., Gupta P., Chowdary V. (2020). Machine learning applications for precision agriculture: a comprehensive review. IEEE Access 9, 4843–4873. doi: 10.1109/ACCESS.2020.3048415. CrossRef. Google Scholar.
78. Shorewala S., Ashfaque A., Sidharth R., Verma U. (2021). Weed density and distribution estimation for precision agriculture using semi-supervised learning. IEEE Access 9, 27971–27986. doi: 10.1109/ACCESS.2021.3057912. CrossRef. Google Scholar.
79. Sinha B. B., Dhanalakshmi R. (2022). Recent advancements and challenges of Internet of Things in smart agriculture: a survey. Future Gen. Comput. Syst. 126, 169–184. doi: 10.1016/j.future.2021.08.006. CrossRef. Google Scholar.
80. Springmann M., Clark M., Mason-D'croz D., Wiebe K., Bodirsky B. L., Lassaletta L., et al. (2018). Options for keeping the food system within environmental limits. Nature 562, 519–525. doi: 10.1038/s41586-018-0594-0. CrossRef. Google Scholar.
81. Srinivas A., Sangeetha J. (2021). Smart irrigation and precision farming of paddy field using unmanned ground vehicle and internet of things system. Int. J. Adv. Comput. Sci. Appl. 12, 407–414. doi: 10.14569/IJACSA.2021.0121254. CrossRef. Google Scholar.
82. Sun Y. P., Liang Y. C. (2022). "Vector field path-following control for a small unmanned ground vehicle with Kalman filter estimation," in Proceedings of the Institution of Mechanical Engineers, Part B: Journal of Engineering Manufacture 236, 1885–1899. doi: 10.1177/0954405420977347. CrossRef. Google Scholar.
83. Tazzari R., Mengoli D., Marconi L. (2020). "Design concept and modelling of a tracked UGV for orchard precision agriculture," in 2020 IEEE International Workshop on Metrology for Agriculture and Forestry (MetroAgriFor), 207–212. Google Scholar.
84. Tsiogkas N., Lane D. M. (2018). An evolutionary algorithm for online, resource-constrained, multivehicle sensing mission planning. IEEE Robot. Automat. Lett. 3, 1199–1206. doi: 10.1109/LRA.2018.2794578. CrossRef. Google Scholar.
85. Villa-Henriksen A., Edwards G. T., Pesonen L. A., Green O., Sórensen C. A. G. (2020). Internet of Things in arable farming: implementation, applications, challenges and potential. Biosyst. Eng. 191, 60–84. doi: 10.1016/j.biosystemseng.2019.12.013. CrossRef. Google Scholar.
86. Wang T., Huang P., Dong G. (2021). Modeling and path planning for persistent surveillance by unmanned ground vehicle. IEEE Trans. Automat. Sci. Eng. 18, 1615–1625. doi: 10.1109/TASE.2020.3013288. CrossRef. Google Scholar.
87. Xie J., Chen J. (2020). "Multi-regional coverage path planning for robots with energy constraint," in 2020 IEEE 16th International Conference on Control & Automation (ICCA), 1372–1377. doi: 10.1109/ICCA51439.2020.9264472. CrossRef. Google Scholar.
88. Xuan B. B. (2021). Consumer preference for eco-labelled aquaculture products in vietnam. Aquaculture 532, 736111. doi: 10.1016/j.aquaculture.2020.736111. CrossRef. Google Scholar.
89. Yang J., Ni J., Li Y., Wen J., Chen D. (2022). The intelligent path planning system of agricultural robot via reinforcement learning. Sensors 22, 1–19. doi: 10.3390/s22124316. CrossRef. Google Scholar.
90. Zhai Z., Martínez-Ortega J.-F., Lucas-Martínez N., Rodríguez-Molina J. (2018). A mission planning approach fors precision farming systems based on multi-objective optimization. Sensors 18, 1–32. doi: 10.3390/s18061795. CrossRef. Google Scholar.
91. Zhang K., Yang Y., Fu M., Wang M. (2019). Traversability assessment and trajectory planning of unmanned ground vehicles with suspension systems on rough terrain. Sensors 19, 1–28. doi: 10.3390/s19204372. CrossRef. Google Scholar.
92. Zhao J., Yu Y., Lei J., Liu J. (2023). Multi-objective lower irrigation limit simulation and optimization model for Lycium barbarum based on NSGA-III and ANN. Water 15, 1–16. doi: 10.3390/w15040783. CrossRef. Google Scholar.
93. Zhao Y., Ding F., Li J., Guo L., Qi W. (2019). The intelligent obstacle sensing and recognizing method based on D--S evidence theory for UGV. Future Gen. Comput. Syst. 97, 21–29. doi: 10.1016/j.future.2019.02.003. CrossRef. Google Scholar.

Yépez-Ponce DF, Salcedo JV, Rosero-Montalvo PD and Sanchis J (2023) Mobile robotics in smart farming: current trends and applications. Front. Artif. Intell. 6:1213330. doi: 10.3389/frai.2023.1213330
Перевод статьи «см » авторов Usturo., оригинал доступен по ссылке. Лицензия: CC BY. Изменения: переведено на русский язык
Фото: Designed by Freepik















































































































Комментарии (0)