Что говорят листья? Простой способ оценить кукурузу по фото со спутников, дронов и тепловых камер
Индекс площади листовой поверхности (LAI) служит важнейшим показателем для характеристики процесса роста и развития кукурузы. Однако инверсионное определение LAI кукурузы на основе беспилотных летательных аппаратов (БПЛА) подвержено влиянию различных факторов, таких как погодные условия, интенсивность света и характеристики сенсоров. По сравнению со спутниками, спектральная стабильность данных, получаемых с БПЛА, относительно ниже, и при крупномасштабном мониторинге легко возникает явление «спектральной фрагментации». Данное исследование было направлено на решение проблемы, заключающейся в том, что при инверсионном определении LAI кукурузы на основе БПЛА сложно одновременно достичь высокого пространственного разрешения и спектральной согласованности. Был предложен двухэтапный метод слияния данных дистанционного зондирования, объединяющий крупное и детальное слияние.
Аннотация
Была использована модель SHapley Additive exPlanations (SHAP) для изучения вклада 20 признаков из 7 категорий в инверсионное определение LAI кукурузы, причем одним из них была температура полога, извлеченная из тепловых инфракрасных изображений. Кроме того, с помощью многошкальных экспериментальных выборок было определено наиболее подходящее окно выборки признаков. Для оптимизации гиперпараметров таких моделей, как Gradient Boosting, XGBoost и Random Forest, использовался метод поиска по сетке, и была проведена оценка их точности. Результаты показали, что при использовании окна выборки признаков 3 × 3 и 9 признаков с наибольшим вкладом точность инверсионного определения LAI на основе Random Forest для всей стадии роста достигла R² = 0,90 и RMSE = 0,38 м²/м². По сравнению с режимом единичного источника данных с БПЛА, точность инверсии повысилась почти на 25%. Значения R² на стадиях смыкания рядов, выбрасывания метелок и налива зерна составили 0,87, 0,86 и 0,62 соответственно. Кроме того, данное исследование подтвердило значимую роль тепловых инфракрасных данных в инверсионном определении LAI, предоставив новый метод для точного инверсионного определения LAI кукурузы.
1. Введение
Кукуруза занимает уникальное и важное положение в современной структуре сельского хозяйства. Она является не только ключевой продовольственной культурой, широко возделываемой во всем мире, но и характерным сельскохозяйственным продуктом, отвечающим разнообразным диетическим потребностям людей [1]. Ключевые узлы процесса роста и развития кукурузы (от стадии всходов, стадии смыкания рядов, стадии выбрасывания метелок, стадии налива зерна и т.д.) и меры по ее возделыванию и управлению используют количество и покрытие листьев в качестве важной основы [2]. Индекс площади листовой поверхности (LAI) является ключевым показателем, который наглядно отражает вышеупомянутый процесс роста кукурузы. Однако он подвержен сильному влиянию взаимодействия различных факторов окружающей среды, таких как плодородие почвы, водный статус, интенсивность света и температурные изменения. Чтобы точно управлять производством кукурузы, выполнение точного инверсионного определения на масштабе делянки является сложной задачей [3,4]. Поэтому детальный анализ показателей дистанционного зондирования листового покрова и ростовой активности кукурузы на разных стадиях роста в настоящее время представляет собой сложную задачу исследований [5].
С быстрым развитием технологий дистанционного зондирования возникла новая возможность для крупномасштабного, быстрого и неразрушающего мониторинга LAI [6]. В процессе инверсионного определения LAI, касающегося используемых источников данных дистанционного зондирования, их можно разделить в основном на: методы инверсионного определения LAI на основе оптического дистанционного зондирования, методы инверсионного определения LAI, объединяющие мультимодальные изображения дистанционного зондирования, и методы инверсионного определения LAI, объединяющие многомасштабные изображения дистанционного зондирования. Используемые модели обычно включают эмпирические модели, физические модели и модели машинного обучения [7].
Метод инверсионного определения LAI на основе оптического дистанционного зондирования анализирует отражательные характеристики растительности в различных спектральных диапазонах и различия в расчетных характеристиках вегетационных индексов для установления модели взаимосвязи с LAI. Этот метод является относительно удобным и недорогим при получении данных, поэтому он широко используется [8,9]. Например, Pradosh Kumar Parida и др. [10] оценили урожайность кукурузы путем инверсионного определения LAI кукурузы на основе мультиспектрального сенсора БПЛА и регрессионного анализа. Anting Guo и др. [11] выполнили инверсионное определение LAI кукурузы, используя модель гауссовских процессов и гиперспектральные данные, с R2 = 0,86. Однако точность этого метода легко подвержена влиянию таких факторов, как погода, используемый спектральный диапазон и спектральное разрешение. Поэтому перед инверсионным определением LAI необходимо выполнить предварительную обработку и выбор признаков [12]. Обычно используют коэффициент корреляции Пирсона для сравнения коэффициентов корреляции различных признаков с целевой переменной [10], но этот метод требует, чтобы распределение переменных-признаков было приблизительно нормальным и не очень подходит для признаков с нелинейными взаимосвязями [13].
Метод инверсионного определения LAI, объединяющий мультимодальные изображения дистанционного зондирования, полностью интегрирует уникальные преимущества различных данных дистанционного зондирования, таких как оптические и LiDAR, полностью использует взаимодополняемость каждого модального набора данных и эффективно справляется с ограничениями одного модального набора данных [14]. Оптические изображения могут предоставлять богатую спектральную информацию и отражать физиолого-биохимические характеристики растительности; радиолокационные изображения чувствительны к структуре и содержанию воды в растительности, могут проникать сквозь облака для получения данных и не подвержены влиянию погоды. Han Ma и др. [15] выполнили инверсионное определение LAI, используя модель множественной линейной регрессии на основе данных бортового LiDAR, MODIS и MISR, объединяя эти структурные параметры с высотой полога и измеренными данными, при этом наивысший R2 достиг 0,73. Этот тип методов может использовать преимущества мультимодальных данных, но сложность получения и стоимость отдельных данных относительно высоки. Тепловые инфракрасные изображения с относительно низкой стоимостью получения изображений можно использовать для инверсионного определения LAI [16]. Тепловые инфракрасные данные могут отражать температурный статус растительности и тесно связаны с физиологическими процессами, такими как транспирация растительности и водный стресс. Они часто используются для инверсионного определения водных показателей сельскохозяйственных культур [17]. LAI тесно связан с транспирацией растительности [18]. Поэтому стоит изучить, могут ли тепловые инфракрасные изображения обеспечивать эффективную поддержку для инверсионного определения LAI кукурузы, отражая разницу в температуре полога.
Метод инверсионного определения LAI, объединяющий многомасштабные изображения дистанционного зондирования, направлен на объединение изображений дистанционного зондирования с разным пространственным разрешением для достижения всестороннего понимания от детальной информации до макроскопических характеристик. В то же время изображения с низким пространственным разрешением обычно имеют большую ширину обзора и относительно стабильную спектральную информацию [19]. Слияние многомасштабных изображений дистанционного зондирования придаст изображениям с высоким пространственным разрешением более стабильные спектральные характеристики. Taifeng Dong и др. [20] использовали модели STARFM и ESTARFM для слияния данных Landsat-8 OLI и MODIS для инверсионного определения LAI, а затем дополнительно использовали метод ассимиляции данных для инверсионного определения биомассы, что доказало, что алгоритм слияния может усилить потенциал технологии дистанционного зондирования для мониторинга роста сельскохозяйственных культур. Однако для детального мониторинга LAI кукурузы на масштабе делянки этот тип метода спутникового слияния изображений явно неприменим [21]. БПЛА с высоким пространственным разрешением часто используются для мониторинга LAI на масштабе делянки, чтобы различать различия в росте внутри поля [11].
Однако качество изображений БПЛА легко подвержено влиянию погодных условий, интенсивности света, количества вылетов, производительности сенсоров [22] и программного обеспечения для обработки изображений. Когда зона мониторинга велика, а время полета длительное, легко возникает явление «спектральной фрагментации». Даже после последующей радиационной коррекции общее спектральное качество изображения может оставаться низким [19], и детальная информация инверсированного LAI может быть трудноотражаемой. Спутниковое дистанционное зондирование, благодаря своему широкому охвату и возможностям периодических наблюдений, стало основным средством получения информации о растительности на региональном и даже глобальном масштабах [23]. Для масштаба делянки, хотя его пространственное разрешение недостаточно для точного улавливания тонких изменений внутри делянки, согласованность и качество его изображений относительно более стабильны, а спектральная информация обычно более богата [24]. Поэтому преимущества спутниковых данных и данных дистанционного зондирования с БПЛА могут быть объединены с помощью методов слияния данных дистанционного зондирования. В текущих исследованиях большинство из них сосредоточено на слиянии данных дистанционного зондирования между спутниковыми изображениями с разным пространственным и временным разрешением, что трудно удовлетворить потребности в слиянии пар изображений с большими различиями в пространственном масштабе, таких как БПЛА-спутник [25]; принудительное слияние данных, наоборот, вызовет потерю детальной информации на изображениях БПЛА. Необходимо изучить подходящие методы слияния данных дистанционного зондирования, чтобы в полной мере использовать преимущества спутниковых данных и данных дистанционного зондирования с БПЛА.
Таким образом, на современном этапе в точном инверсионном определении LAI кукурузы на масштабе делянки все еще существует несколько проблем, которые необходимо решить [26]. Во-первых, большинство исследований полагаются на один источник данных дистанционного зондирования и не исследуют в полной мере дополнительные преимущества многоданных источников [27]. Хотя некоторые исследования пытались выполнить слияние данных, методы в основном представляют собой простое наложение или комбинацию на основе эмпирических формул, которые не могут эффективно интегрировать пространственную и спектральную информацию разных источников данных, и все еще существует большое пространство для улучшения точности инверсии [28]. Во-вторых, существует недостаток систематизации и целенаправленности в выборе признаков и оптимизации моделей машинного обучения. Моделям не хватает интерпретируемости, что легко приводит к избыточности признаков или отсутствию ключевых признаков [29]. В то же время выбор гиперпараметров моделей машинного обучения в основном зависит от опыта или методов проб и ошибок, что затрудняет нахождение оптимальной конфигурации, что влияет на производительность модели. Точное инверсионное определение LAI кукурузы на масштабе делянки требует исследования методов с высоким пространственным разрешением, точностью и интерпретируемостью.
Поэтому в данном исследовании были проведены полевые измерения LAI и мониторинг с помощью дистанционного зондирования на БПЛА на кукурузной ферме в городе Шэньму провинции Шэньси, был предложен двухэтапный метод слияния данных дистанционного зондирования для изображений БПЛА и спутниковых мультиспектральных изображений, улучшена интерпретируемость модели инверсии на основе модели SHAP, исследован вклад тепловых инфракрасных изображений в точное инверсионное определение LAI, и, наконец, сравнены возможности передовых алгоритмов машинного обучения для достижения точного мониторинга LAI кукурузы на масштабе делянки, с целью предоставления новых методов для слияния изображений дистанционного зондирования и точного инверсионного определения параметров агрономической ситуации.
2. Материалы и методы
2.1. Район исследования
Данное исследование проводилось в городе Шэньму провинции Шэньси, Китай (Рисунок 1), который находится в переходной зоне между холмистым лессовым районом и лугами Внутренней Монголии, представляя собой уникальный географический и экологический ландшафт. Климат — континентальный аридный и полуаридный, с совпадающими периодами дождей и тепла. Среднегодовая температура составляет 8,9 °C, среднегодовое количество осадков — 396 мм, а среднегодовое испарение достигает 1790 мм. Тип почвы — в основном эоловые песчаные почвы с плохой структурой и низким содержанием органических веществ. Поэтому, как энергетический город, в основном занимающийся разработкой угольных ресурсов, город Шэньму провел большую работу в области сельскохозяйственного производства, охраны окружающей среды и экологического управления. В районе исследования есть несколько паровых полей, фактическая обрабатываемая площадь составляет около 80 му. После обработки почвы и внесения основного удобрения кукуруза была посеяна в разные периоды (Рисунок 1c), цифры на рисунке указывают порядок сева, а участок, обозначенный как «0», находится под управлением фермера, и дата сева самая ранняя. Поскольку на экспериментальном поле запланировано множество дат сева, стадии роста, упомянутые в статье, относятся к стадиям роста кукурузы, посеянной в третий период; цифры на каждом участке на Рисунке 1d представляют площадь участка (единица измерения — му), и было установлено оборудование для интегрированного управления водой и удобрениями, чтобы обеспечивать необходимую поддержку водой и удобрениями для роста кукурузы.
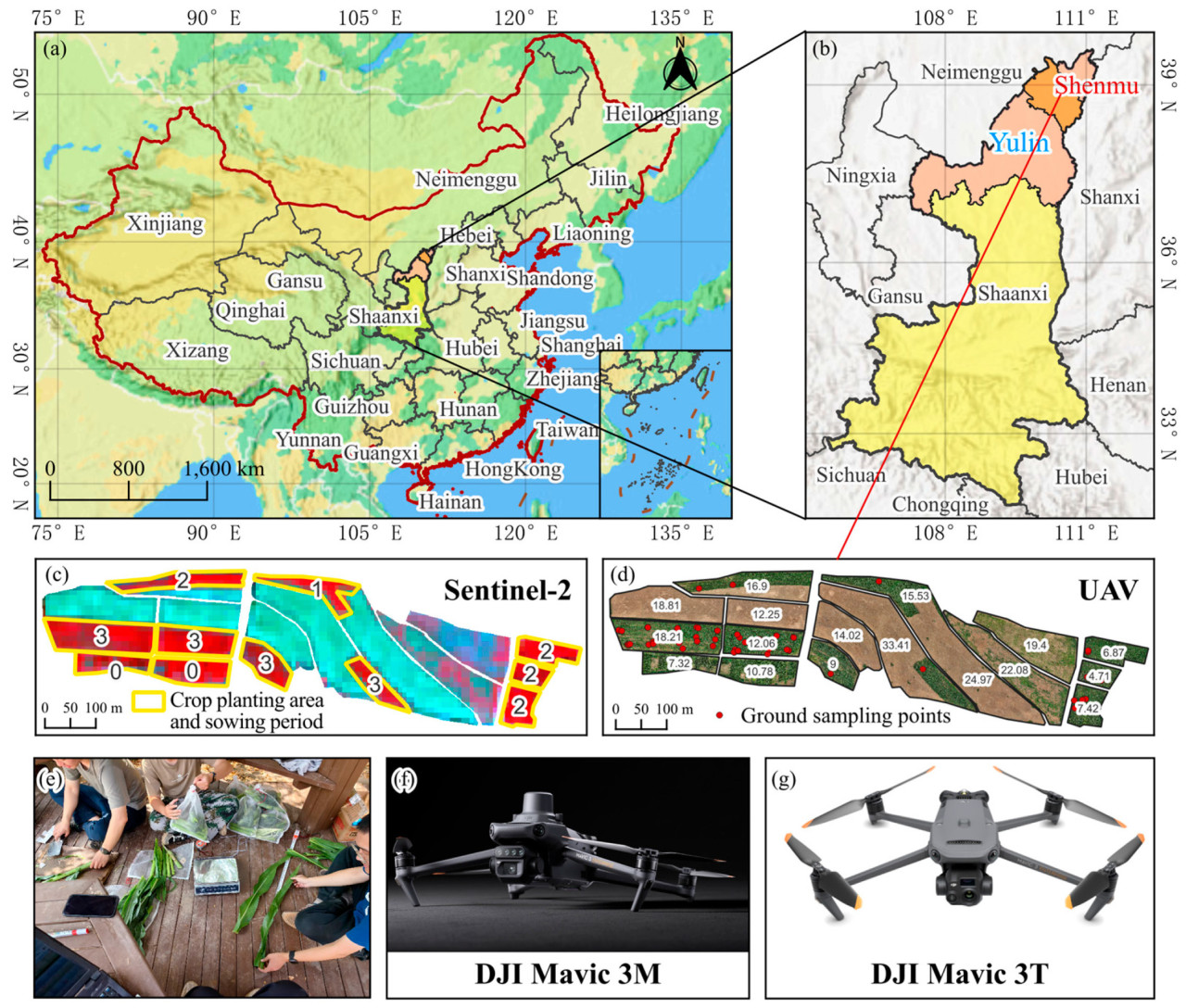
Рисунок 1. Расположение экспериментальной фермы и инструменты, используемые в этом исследовании. (a,b) — уменьшенное и увеличенное изображения расположения района исследования. (c) — ложное цветное изображение района исследования на основе Sentinel-2. Желтая рамка указывает на зону посева кукурузы, а цифры внутри представляют последовательность сева. (d) — истинное цветное изображение района исследования, полученное с помощью дрона. Цифры на каждом участке обозначают площадь участка, единица измерения — му. (e) — фотография места обработки образцов. (f) показывает дрон DJI Mavic 3M, а (g) показывает дрон DJI Mavic 3T.
2.2. Получение и обработка данных
2.2.1. Данные дистанционного зондирования
В этом исследовании использовались данные спутниковых изображений миссии Sentinel-2. (Рисунок 1c показывает ложное цветное изображение района исследования на основе изображения Sentinel-2) [30]. Sentinel-2 — это высокоразрешающий мультиспектральный спутник для получения изображений. Когда спутниковые системы 2A и 2B дополняют друг друга, период повторного визита составляет 5 дней, а наивысшее пространственное разрешение может достигать 10 м. На основе платформы GEE (Google Earth Engine) [31] был загружен продукт поверхностной отражательной способности Sentinel-2 с временем получения, наиболее близким к времени получения изображения БПЛА, и безоблачный. Учитывая, что пространственное разрешение различных диапазонов данных Sentinel-2 различается, например, пространственное разрешение красного краевого диапазона (B6) составляет 20 м, для повторной выборки обработанных диапазонов до разрешения 10 м использовался метод интерполяции ближайшего соседа. В Таблице 1 представлена соответствующая информация об использованных в статье данных Sentinel-2.
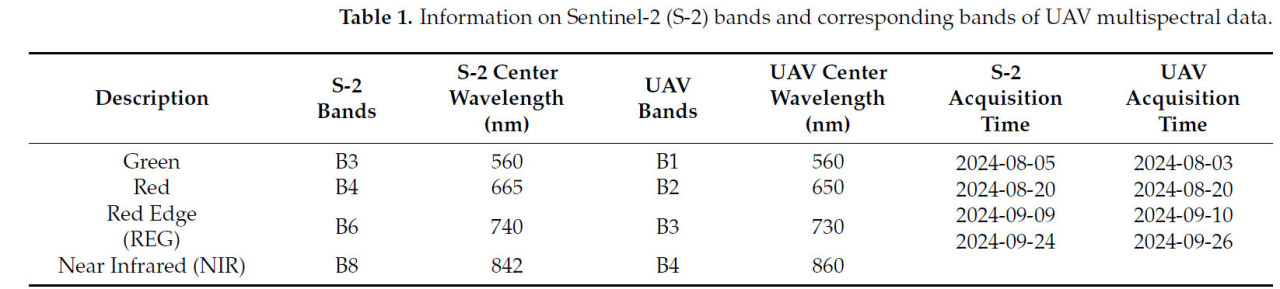
Таблица 1. Информация о диапазонах Sentinel-2 (S-2) и соответствующих диапазонах мультиспектральных данных БПЛА.
В этом исследовании использовался мультиспектральный БПЛА DJI Mavic 3 (DJI M3M). (Рисунок 1f показывает продукт DJI M3M. Рисунок 1d — это предварительно обработанное истинное цветное изображение района исследования, полученное этим БПЛА.), который может собирать точные мультиспектральные данные. Система формирования изображений этого БПЛА оснащена 1 объективом для видимого света и 4 мультиспектральными объективами. Информация об объективах и времени получения изображений подробно представлены в Таблице 1. В этом исследовании были собраны изображения БПЛА за четыре стадии роста: стадия смыкания рядов, стадия выбрасывания метелок, ранняя стадия налива зерна и поздняя стадия налива зерна соответственно. В процессе получения изображений БПЛА съемка проводилась с 9:00 до 15:00 в солнечные, безветренные и безоблачные дни. Общая продолжительность одного полета обычно составляет около 1 часа. Высота полета БПЛА была установлена на 120 м, боковое перекрытие — 80%, а продольное перекрытие — 80%, чтобы обеспечить точную мозаику изображений. Программное обеспечение DJI Terra (номер версии 4.2.5.) использовалось для обработки и создания мозаики изображений БПЛА, и окончательное пространственное разрешение полученного изображения составило 4,6 см.
Тепловизионный БПЛА DJI Mavic 3 Thermal (DJI M3T, Рисунок 1g) — это тепловой инфракрасный БПЛА, используемый в данной статье. Время получения данных, высота полета и настройки перекрытия были такими же, как у БПЛА DJI M3M. Разрешение камеры достигает 640 × 512, а фактическое пространственное разрешение составляет 15 см. DJI M3T имеет широкоугольную телекамеру и тепловую инфракрасную камеру. Поскольку тепловое инфракрасное изображение, полученное DJI M3T, имеет формат R-JPEG, температурную информацию определенной точки или области можно извлечь с помощью DJI Thermal Analysis Tool 3, но значение растра не является значением температуры. Поэтому мы использовали Python (версия Python, используемая как для обработки изображений, так и для разработки моделей: 3.10.16.) для подключения к интерфейсу DJI TSDK для преобразования значения температуры и извлечения информации POS, а затем использовали DJI Terra для создания мозаики температурного изображения, чтобы окончательно получить данные о температуре полога поля в формате Tiff и с сантиметровым разрешением.
Поскольку пространственное разрешение изображения БПЛА относительно высокое, а его роль в руководстве сельскохозяйственным производством ограничена, и вычислительная сложность относительно высока, все изображения дистанционного зондирования в этом исследовании были повторно дискретизированы до 0,5 м; другими словами, пространственное разрешение окончательного инверсионного продукта LAI также составило 0,5 м. Чтобы изучить взаимосвязь отображения между мультиспектральным изображением БПЛА и изображением Sentinel-2 и извлечь спектральную информацию различных наземных объектов на спутниковом изображении, мультиспектральное изображение БПЛА также было повторно дискретизировано до 10 м.
2.2.2. Наземные данные
Во время получения изображений БПЛА были собраны полевые измерительные данные образцов (собирались только наземные данные первых трех стадий роста), включая индекс площади листовой поверхности (LAI) кукурузы в районе исследования и GPS-данные точек. Используемыми инструментами были рулетка и RTK i90, а процесс измерения данных показан на Рисунке 1e. Охваченные выборкой стадии роста были стадия смыкания рядов, стадия выбрасывания метелок и ранняя стадия налива зерна. Чтобы обеспечить репрезентативность собранных точек образцов, перед выборкой район исследования был разделен на основе вегетационного индекса, рассчитанного по спутниковому изображению Sentinel-2, а затем были установлены стратифицированные точки выборки в соответствии с площадью каждого раздела [32]. Положения точек выборки показаны на Рисунке 1d. После прибытия в точку выборки выбиралась кукуруза, которая наилучшим образом представляла рост этой области. Информация о положении была получена с помощью RTK. После срезания кукурузы близко к земле все листья были отделены и классифицированы как сложенные и развернутые листья. Были измерены длина и ширина всех зеленых листьев, а LAI был рассчитан в соответствии с формулами (1) и (2) [33].

где S_(одно_растение) представляет площадь листьев одного растения, развернутый_лист и развернутая_ширина представляют длину и ширину развернутых листьев соответственно; сложенный_лист и сложенная_ширина представляют длину и ширину сложенных листьев соответственно; n и m представляют количество развернутых и сложенных листьев одного растения кукурузы соответственно; N_(единица_площади_земли) представляет количество растений кукурузы на единицу площади земли; а S_(единица_площади_земли) представляет единицу площади земли. Распределение и основная статистическая информация о значениях LAI, собранных в районе исследования, показаны на Рисунке 2. Значение LAI кукурузы в районе исследования увеличивается по мере стадии роста. LAI на стадии налива зерна в целом находится на высоком уровне с широким диапазоном распределения данных, в основном между 3 и 5. Стадия выбрасывания метелок находится на втором месте, а дисперсия данных наименьшая. Значение LAI на стадии смыкания рядов относительно низкое, и распределение относительно разбросано, со средним значением всего 1,73. Это распределение данных соответствует фактической ситуации роста кукурузы в районе исследования.
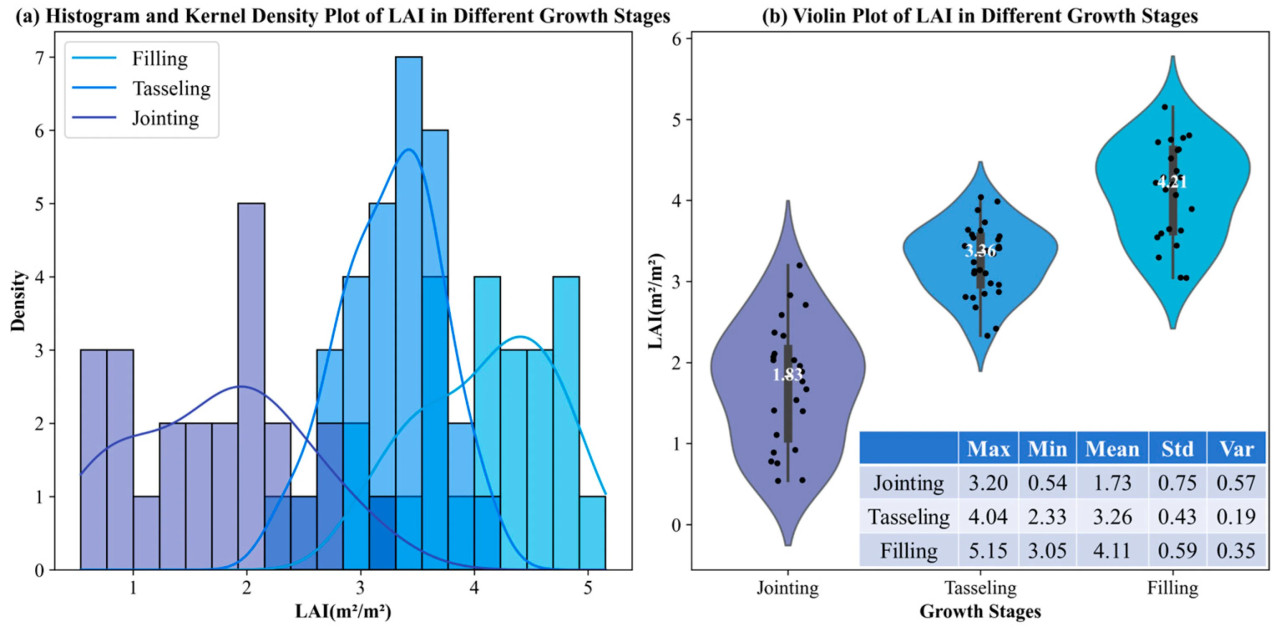
Рисунок 2. Распределение образцов LAI на разных стадиях роста.
2.3. Двухэтапный метод слияния данных дистанционного зондирования
Чтобы сохранить высокое разрешение и одновременно получить богатую и согласованную спектральную информацию, в этом исследовании было выполнено слияние мультиспектрального изображения БПЛА с соответствующими диапазонами Sentinel-2. Однако необходимым условием для слияния данных изображений дистанционного зондирования является то, что объединяемые изображения имеют одинаковые пространственные атрибуты, то есть одинаковую систему координат, одинаковое количество строк и столбцов растров и взаимно однозначное соответствие пространственных положений. Поэтому сначала необходимо повторно дискретизировать изображение Sentinel-2 до того же пространственного разрешения, что и изображение БПЛА, затем использовать одну и ту же маску векторных данных для извлечения объединяемых изображений и, наконец, повторно дискретизировать их до пространственного разрешения изображения Sentinel-2.
Предложенный в этом исследовании двухэтапный метод слияния данных дистанционного зондирования разделен на две части: грубое слияние и точное слияние (Рисунок 3 (Этап 1)). Грубое слияние преобразует спектральный диапазон изображений БПЛА, полученных за несколько вылетов и в разное время, в диапазон изображения Sentinel-2, с более стабильными и согласованными спектрами, поглощая более богатую спектральную информацию спутникового изображения.
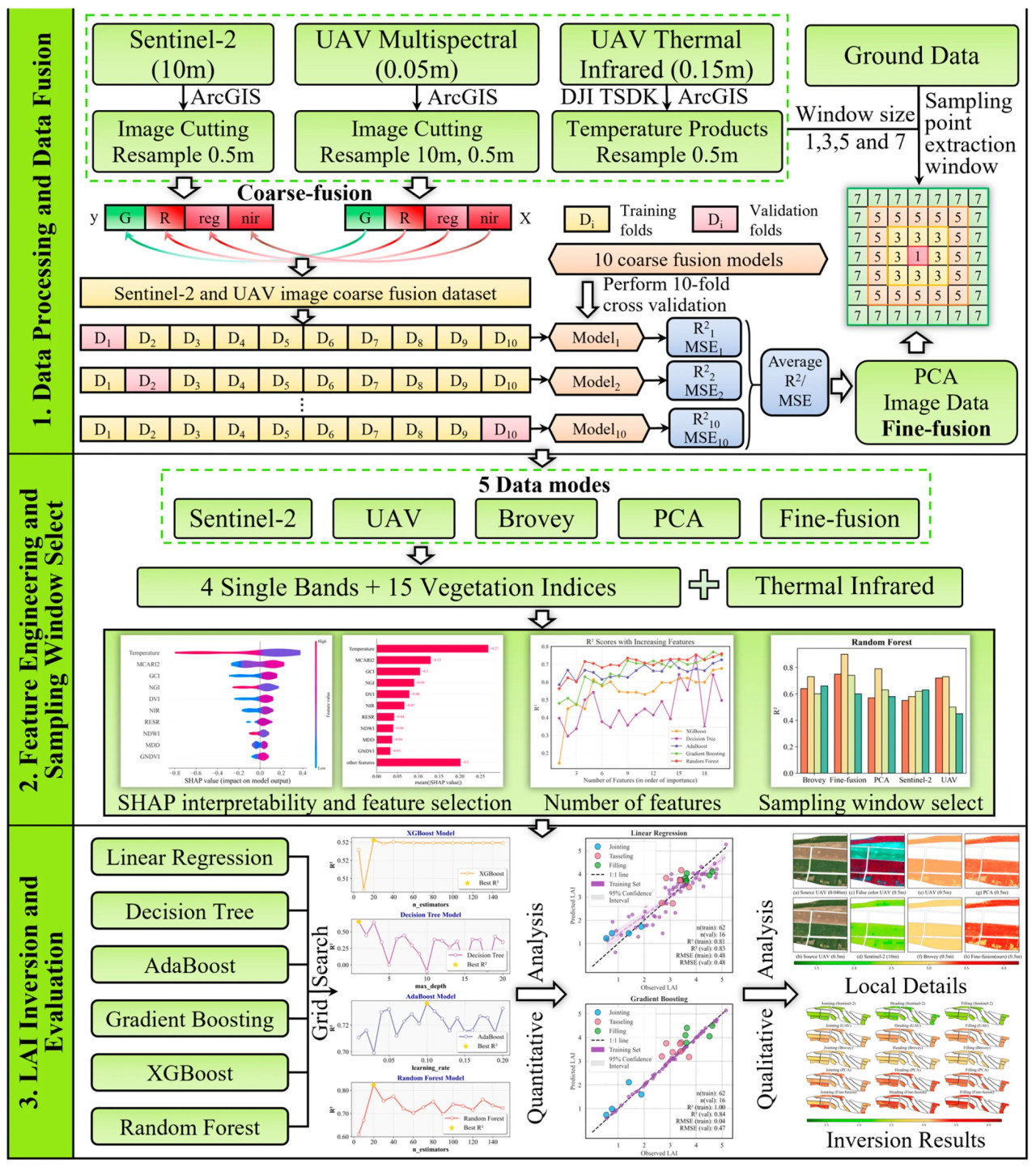
Рисунок 3. Блок-схема интерпретируемого точного инверсионного определения LAI кукурузы путем слияния спутниковых, мультиспектральных изображений БПЛА и тепловых инфракрасных изображений. Этап 1 — это процесс обработки и интеграции данных. Этап 2 — это процесс разработки признаков. Этап 3 — это процесс построения и оценки модели инверсионного определения LAI.
Соответствующие диапазоны обработанного изображения БПЛА и изображения Sentinel-2 извлекаются попиксельно для создания набора данных для грубого слияния данных дистанционного зондирования. Спектральное значение изображения БПЛА используется как независимая переменная, а спектральные значения спутникового изображения — как целевая переменная. Десять методов машинного обучения, статистического обучения и ансамблевого обучения, такие как CatBoost [34], MLP [35] и RF [36], используются для изучения взаимосвязи отображения, и применяется метод десятикратной перекрестной проверки для обеспечения надежности и способности к обобщению выбранной модели на разных подмножествах данных. Модель, наиболее подходящая для грубого слияния изображений дистанционного зондирования, выбирается в соответствии со средней точностью за десять обучений и применяется к изображению БПЛА высокого разрешения для достижения грубого слияния.
Механизм слияния при грубом слиянии будет генерировать определенные ошибки в процессе работы, что приводит к явлению соляно-перечного шума, а также может искажать спектральную информацию изображения БПЛА. Поэтому после грубого слияния необходимо выполнить точное слияние. В этом исследовании используется метод слияния PCA для извлечения ключевых признаков изображения грубого слияния, удаления избыточной информации и слияния с исходным изображением БПЛА для дальнейшего объединения спектральной информации БПЛА, улучшения качества слияния изображения и достижения точного представления особенностей наземных объектов.
2.4. Построение модели инверсионного определения LAI на основе машинного обучения
2.4.1. Выбор многомасштабного окна выборки точек
Чтобы определить наиболее подходящий масштаб для извлечения признаков, в этом исследовании проводится извлечение признаков из выбранных признаков с использованием многомасштабных окон выборки. То есть, принимая растровые точки признаков, соответствующие различным режимам данных в точках выборки, за центр, как показано на крайней правой матричной диаграмме на Рисунке 1 — Этап 1, добавляются 0, 1, 2 и 3 круга растров соответственно для формирования окон выборки признаков размерами 1, 3, 5 и 7. Затем вычисляется среднее арифметическое всех значений растра в окнах выборки признаков разных размеров в пространственных положениях, соответствующих всем точкам выборки, и это значение представляет признак в данной области окна.
2.4.2. Разработка признаков
В этой статье всего было разработано пять режимов данных (Рисунок 3 (Этап 2)), а именно Sentinel-2, БПЛА, Brovey, PCA и двухэтапный метод слияния данных дистанционного зондирования (Fine-Fusion). Среди них Sentinel-2 и БПЛА — это режимы данных изображений дистанционного зондирования из одного источника. Brovey, PCA и Fine-Fusion — это режимы данных, в которых для слияния изображений БПЛА и Sentinel-2 используются алгоритм Brovey, алгоритм PCA и алгоритм, предложенный в этой статье, соответственно. Данные дистанционного зондирования в этих пяти режимах данных подвергаются извлечению признаков, фильтрации и т.д. с помощью следующих методов и в конечном итоге используются для инверсионного определения LAI.
Основываясь на предыдущих результатах исследований, в этом исследовании была построена относительно всеобъемлющая система наборов признаков. Эта система включает 15 признаков вегетационных индексов пяти категорий, таких как атмосферный вегетационный индекс, структурный вегетационный индекс, пигментный вегетационный индекс, водный вегетационный индекс и почвенный вегетационный индекс (Таблица 2), а также четыре спектральных признака, таких как зеленый, красный, красный край и ближний инфракрасный диапазон, и признак температуры полога, извлеченный из теплового инфракрасного изображения, который может отражать характеристики растительности на основе различных спектральных диапазонов и информации о температуре полога.
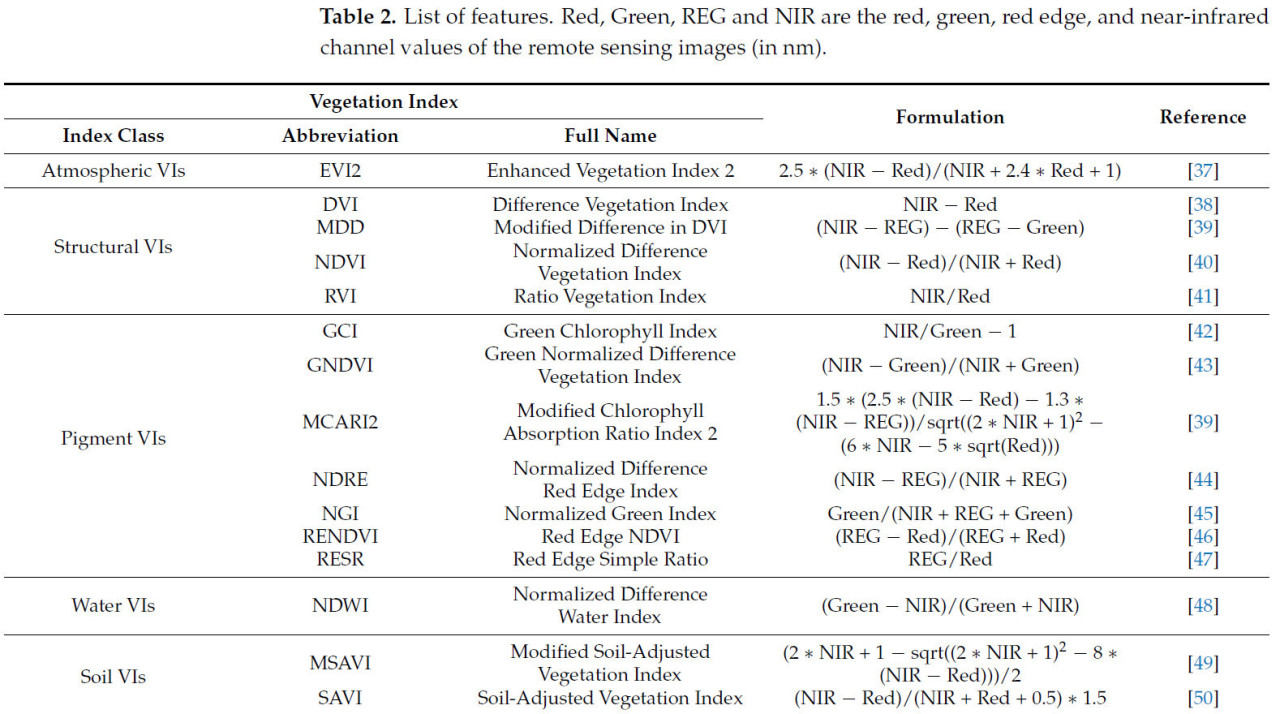
Таблица 2. Список признаков. Red, Green, REG и NIR — это значения красного, зеленого, красного края и ближнего инфракрасного каналов изображений дистанционного зондирования (в нм).
Всего в наборе признаков этого исследования 20 признаков. Чтобы отобрать наиболее подходящую комбинацию признаков для точного инверсионного определения LAI, мы проанализировали вклад различных признаков в модель инверсионного определения LAI на основе модели SHapley Additive exPlanations (SHAP). SHAP основан на методе теории кооперативных игр и может улавливать нелинейные и сложные взаимосвязи между признаками и выходами модели. Он может обрабатывать многомерные данные и обладает высокой интерпретируемостью. Его основная идея заключается в объяснении результата прогнозирования модели как суммы вкладов каждого признака. Для данной модели прогнозирования f(x), где x = (x₁, x₂, …, x_m) представляет вектор входных признаков, результат прогнозирования модели может быть выражен как:

где g(E[x]) — это ожидаемое значение прогноза модели, а φᵢ(x) — это SHAP-значение i-го признака, представляющее вклад этого признака в результат прогнозирования. Расчет SHAP-значения основан на концепции значения Шепли. Для признака xᵢ формула расчета его SHAP-значения φᵢ(x) выглядит следующим образом:

где для i-го признака его SHAP-значение φᵢ(x) равно сумме по всем подмножествам признаков S, не содержащим признак xᵢ, m — общее количество признаков, f_{S ∪ {xᵢ}}(x) — это значение прогноза модели при совместном действии подмножества признаков S и признака xᵢ, а f_S(x) — это значение прогноза модели при действии только подмножества признаков S.
SHAP может представлять только вклад каждого признака в модель инверсионного определения LAI и не может определить окончательную комбинацию признаков для применения. Поэтому после ранжирования вкладов признаков на основе SHAP-значений мы добавляем по одному признаку за раз от самого высокого до самого низкого ранга для обучения и валидации модели инверсионного определения LAI. Путем анализа и сравнения изменений точности валидации модели с разным количеством признаков, а также учитывая производительность модели, мы стремимся выбрать минимальное количество признаков для достижения относительно высокой точности инверсии, в конечном итоге определяя более подходящую комбинацию признаков.
2.5. Моделирование и оценка
2.5.1. Моделирование
В этом исследовании для достижения точного инверсионного определения индекса площади листовой поверхности (LAI) кукурузы мы использовали различные модели машинного обучения и ансамблевого обучения на основе деревьев, включая Decision Tree [51], AdaBoost [52], Gradient Boosting [53], XGBoost [54] и Random Forest [36]. Чтобы помочь оценить относительные преимущества и явление переобучения нелинейных моделей с точки зрения точности и способности к обобщению, мы добавили Linear Regression [55]. Эти модели охватывают различные типы алгоритмов, такие как линейные и нелинейные (Рисунок 3 (Этап 3)).
Среди них Decision Tree рекурсивно разделяет данные через древовидную структуру и подходит для обработки сложных нелинейных взаимосвязей, но он склонен к переобучению. Чтобы улучшить способность к обобщению модели, в этой статье дополнительно используются методы ансамблевого обучения на основе деревьев решений, включая AdaBoost, Gradient Boosting и XGBoost. AdaBoost улучшает устойчивость к шуму путем итеративного обучения нескольких слабых обучающихся моделей и их объединения с весами; Gradient Boosting оптимизирует функцию потерь путем постепенного построения деревьев решений и демонстрирует более сильную способность к нелинейной аппроксимации. XGBoost, как улучшенная версия Gradient Boosting, дополнительно повышает стабильность и точность модели за счет более эффективных методов вычислений и регуляризации. Random Forest — это ансамблевая модель на основе нескольких деревьев решений. Она снижает риск переобучения за счет случайной выборки и выбора признаков и особенно подходит для обработки многомерных данных и наборов данных с множеством признаков. Модель обладает определенной устойчивостью и обобщающей способностью.
Для оптимизации производительности этих нелинейных моделей в этом исследовании используется метод поиска по сетке для настройки общих гиперпараметров, таких как максимальная глубина, минимальное количество образцов, необходимое для разделения, количество оценщиков и скорость обучения. Здесь максимальная глубина и количество оценщиков определяют глубину роста и количество деревьев соответственно. Если их значения слишком высоки, вероятно возникновение переобучения; если слишком низки, может возникнуть недообучение. Минимальное количество образцов влияет на решение о разделении данных. Если оно слишком мало, модель может быть чрезмерно чувствительна к локальным данным, что приводит к переобучению; если слишком велико, будет трудно уловить тонкие особенности. Скорость обучения контролирует размер шага обновления параметров. Слишком большая скорость обучения может привести к тому, что модель пропустит оптимальное решение, а слишком маленькая — замедлит скорость обучения. Серия предварительно заданных значений гиперпараметров применяется к модели одна за другой. Путем сравнения точностей модели инверсии при применении разных гиперпараметров определяется наиболее подходящая комбинация гиперпараметров, что позволяет сбалансировать аппроксимирующую и обобщающую способности модели и снизить риск переобучения.
2.5.2. Оценочные метрики
Для всесторонней оценки производительности модели грубого слияния изображений дистанционного зондирования и модели точного инверсионного определения LAI в этой статье выбираются три показателя: R² (коэффициент детерминации), MAE (средняя абсолютная ошибка) и RMSE (среднеквадратичная ошибка). Эти показатели помогают выявить достоверность пространственной спектральной информации после слияния изображений и степень отклонения прогнозируемого значения, а также оценить точность и устойчивость модели при точном инверсионном определении LAI. Формулы расчета R², MAE и RMSE показаны в формулах (5)–(7):


где y_i — наблюдаемое значение, ŷ_i — прогнозируемое значение модели, ȳ — среднее значение наблюдаемых значений, а n — общее количество образцов. R² измеряет корреляцию между прогнозируемым значением модели и наблюдаемым значением, и диапазон значений составляет [0, 1]. Чем ближе к 1, тем лучше аппроксимирующий эффект модели; чем меньше значения MAE и RMSE, тем меньше ошибка модели.
3. Результаты
3.1. Точность грубого слияния в двухэтапном методе слияния данных дистанционного зондирования
Для достижения точного слияния многоданных изображений дистанционного зондирования в этом исследовании были объединены грубое слияние и точное слияние и предложен двухэтапный метод слияния данных дистанционного зондирования. На Рисунке 4 показаны средние результаты точности различных моделей для всех диапазонов при грубом слиянии, а также для четырех различных диапазонов: зеленого, красного, красного края и ближнего инфракрасного. Среди них модель CatBoost демонстрирует наилучшую производительность, со средним значением R² до 0,897, что свидетельствует о хорошей аппроксимации модели к данным. Среднее значение MAE составляет всего 0,0009, что означает, что среднее абсолютное отклонение между отражательной способностью изображения грубого слияния и Sentinel-2 чрезвычайно мало. Напротив, производительность таких моделей, как AdaBoost, PLSR, ridge regression, SVR и Extra-Tree, в этой оценке относительно слаба. Что касается точности грубого слияния для разных диапазонов, точность грубого слияния в зеленом диапазоне относительно низкая. Точность грубого слияния в красном и красном краевом диапазонах наилучшая, за ней следует точность в ближнем инфракрасном диапазоне.
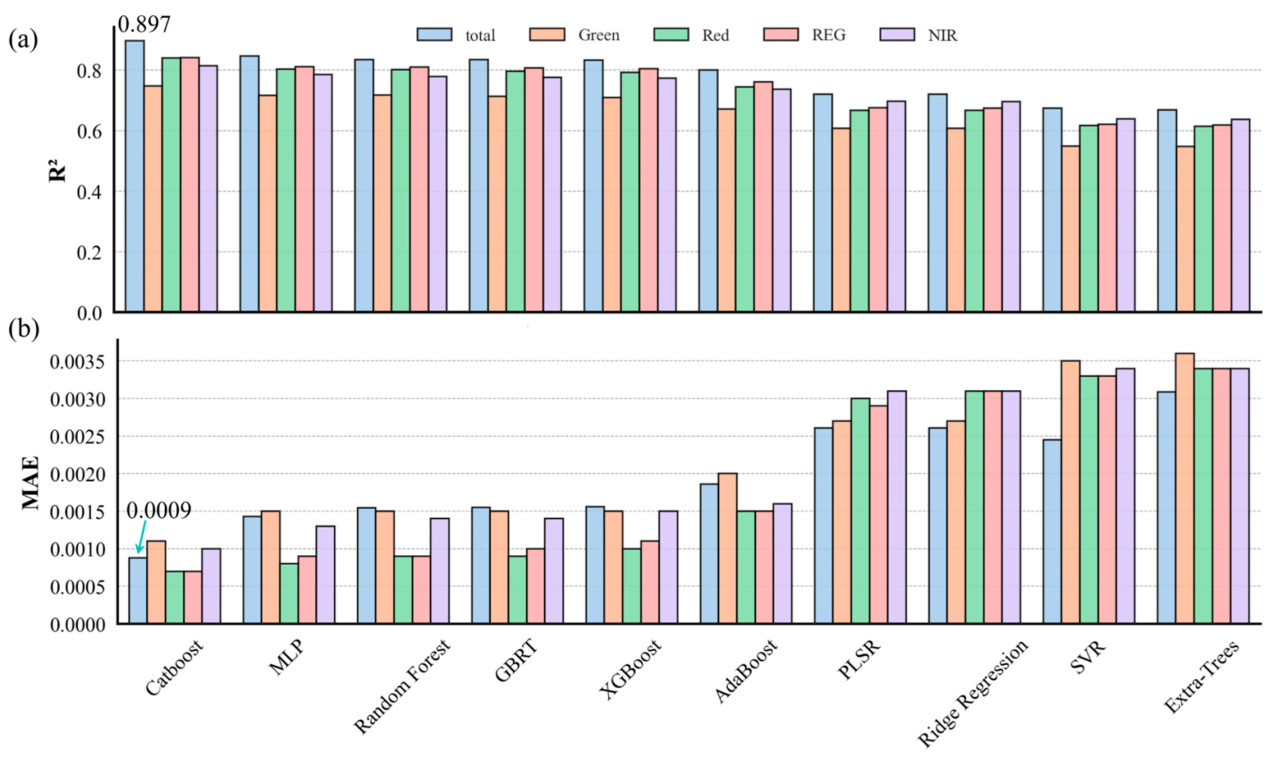
Рисунок 4. Средняя точность десятикратной перекрестной проверки для грубого слияния БПЛА и Sentinel-2. (a) представляет R² грубого слияния, (b) представляет MAE грубого слияния.
3.2. Обучение моделей точного инверсионного определения LAI
3.2.1. Выбор окна извлечения точек выборки
На Рисунке 5 иллюстрируются влияния различных масштабов окон выборки признаков, режимов данных и моделей на модель инверсионного определения LAI. Анализ показывает, что применимые окна выборки различаются в различных режимах данных. За исключением режима данных Sentinel-2, большинство других режимов данных достигают наилучших результатов при использовании масштаба окна 3×3 для инверсионного определения LAI с разными моделями. Когда окна выборки равны 5 и 7 соответственно, их покрытие относительно велико. В результате пространственные детали признаков сглаживаются из-за вычисления среднего значения, что ослабляет способность модели улавливать детальные изменения и снижает согласованность с диапазоном точек выборки. Поэтому в этом исследовании для окончательного точного инверсионного определения LAI выбирается окно выборки 3×3.
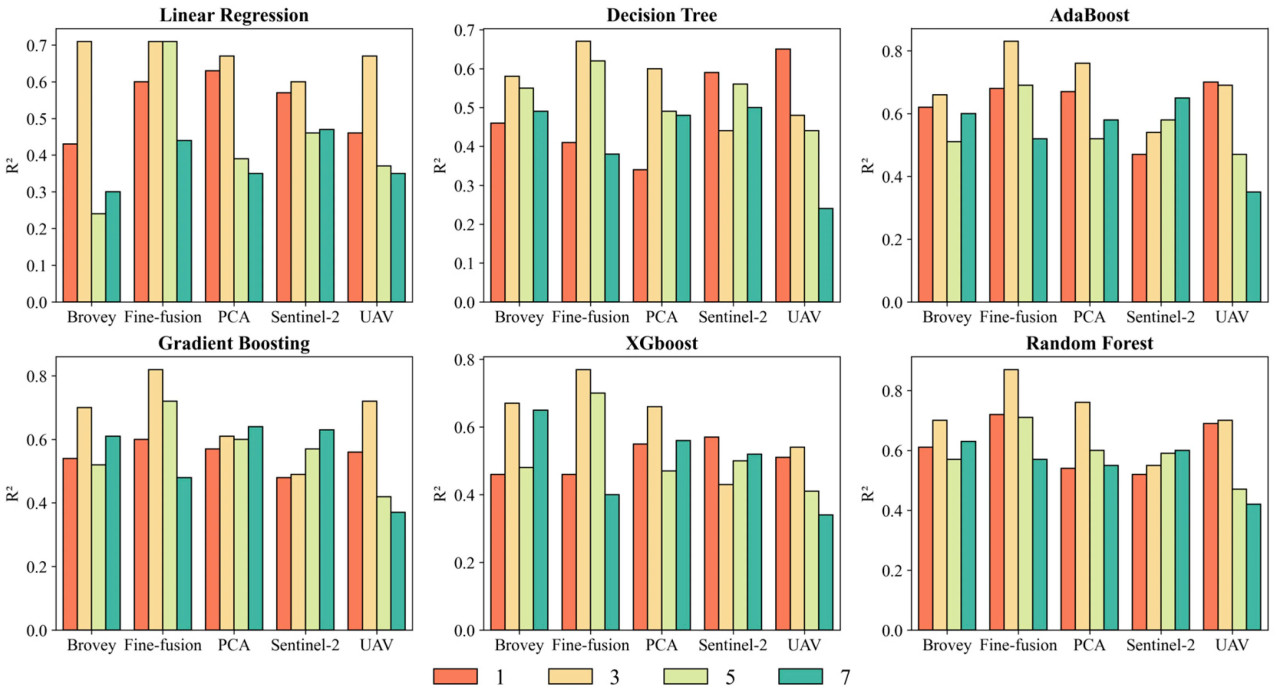
Рисунок 5. Точность окна выборки признаков для разных точек выборки, соответствующих разным режимам данных и моделям.
По сравнению с режимами данных из одного источника, такие методы, как Brovey, PCA и двухэтапное слияние данных дистанционного зондирования (Fine-fusion), могут улучшить точность точного инверсионного определения LAI. Среди них предложенный в этой статье двухэтапный метод слияния данных дистанционного зондирования более эффективен, значительно превосходя режимы данных из одного источника (БПЛА и Sentinel-2). Сравнение различных моделей показывает, что методы линейной регрессии и деревьев решений работают плохо, в то время как алгоритм случайного леса дает наилучшие результаты для точного инверсионного определения LAI кукурузы.
3.2.2. Интерпретация моделей инверсионного определения LAI
При обучении модели точного инверсионного определения LAI, поскольку алгоритм Random Forest работает относительно хорошо, в этой статье количественно анализируется вклад каждого признака в выход модели на основе модели SHAP. На Рисунке 6a,b показан общий вклад признаков в инверсионную модель. Температура полога имеет наибольший вклад в точное инверсионное определение LAI. Чем выше температура полога, тем ниже ее SHAP-значение (Рисунок 6c), что указывает на то, что этот признак обычно снижает выходное значение модели. Различные стадии роста сельскохозяйственных культур имеют разные физиологические характеристики и морфологические структуры, и взаимосвязь между температурой полога и LAI также различается. MCARI2 (модифицированный индекс отношения поглощения хлорофилла 2) и GCI (зеленый хлорофилльный индекс) демонстрируют относительно большие положительные SHAP-значения.
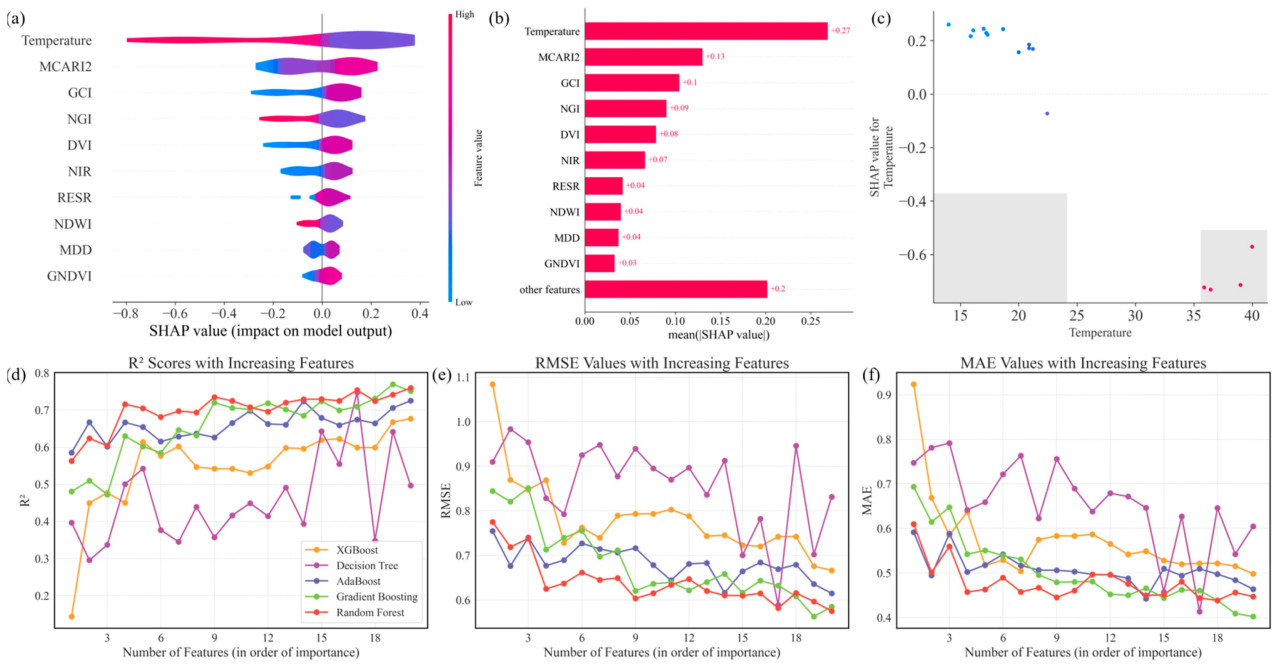
Рисунок 6. Разработка признаков для оптимальной модели инверсионного определения LAI кукурузы на основе SHapley Additive exPlanations (SHAP) с использованием изображений БПЛА. (a) Итоговая диаграмма оптимальной модели инверсионного определения LAI, (b) столбчатая диаграмма среднего |SHAP-значения|, (c) диаграмма зависимости лучших признаков, в (a–c) использована модель Random Forest, а (d–f) представляют производительность моделей с разным количеством признаков.
NGI (нормализованный зеленый индекс) и NDWI (нормализованный разностный водный индекс) соответственно демонстрируют подавляющий эффект на результат инверсионного определения LAI. Увеличение LAI означает, что количество листьев на единицу площади увеличивается, а взаимное затенение между листьями усиливается. Это вызывает изменение поглощения и пропускания зеленого света листьями. Больше зеленого света поглощается и рассеивается верхними листьями, и зеленый свет, отражаемый на сенсор, уменьшается, что приводит к снижению NGI. NDWI в основном используется для извлечения информации о поверхностных водных объектах. Когда значение LAI низкое, то есть растительный покров низкий, влияние поверхностных водных объектов на сигнал дистанционного зондирования более значимо, что приводит к более высокому значению NDWI; когда значение LAI высокое, экранирующий эффект растительности на сигнал дистанционного зондирования усиливается, что приводит к более низкому значению NDWI.
В этом исследовании обнаружено, что с увеличением количества признаков производительность каждой модели сначала увеличивается, а затем стремится к стабилизации, что показано при сравнительном анализе влияния количества признаков на точность модели (Рисунок 6d–f). Стабильность Decision Tree относительно низкая, а стабильность XGBoost и AdaBoost иногда колеблется. Стабильность Random Forest и Gradient Boosting выше, и изменение точности относительно плавное с увеличением количества признаков. Когда количество признаков равно 9, хотя точность не самая высокая, она также относительно хорошая. Учитывая такие факторы, как точность, способность к обобщению, устойчивость и эффективность работы модели, в этом исследовании для точного инверсионного определения LAI используются 9 признаков, а именно: Temperature, MCARI2, GCI, NGI, DVI, NIR, RESR, NDWI и MDD. Окончательно определенная комбинация признаков включает не только такие признаки вегетационных индексов, как структурный вегетационный индекс и пигментный вегетационный индекс, но также учитывает температуру полога и спектральную информацию, что подтверждает эффективность SHAP в фильтрации признаков.
3.2.3. Выбор параметров модели на основе метода поиска по сетке
Для дополнительной оптимизации конфигурации гиперпараметров каждой модели инверсионного определения LAI в этой статье используется метод поиска по сетке и настраиваются ключевые гиперпараметры каждой модели, включая максимальную глубину дерева (max_depth), скорость обучения (learning_rate) и количество оценщиков (n_estimators). Результаты показаны на Рисунке 7, где представлена точность каждой модели при применении разных гиперпараметров. Золотая звезда указывает на оптимальное значение определенного гиперпараметра для определенной модели.
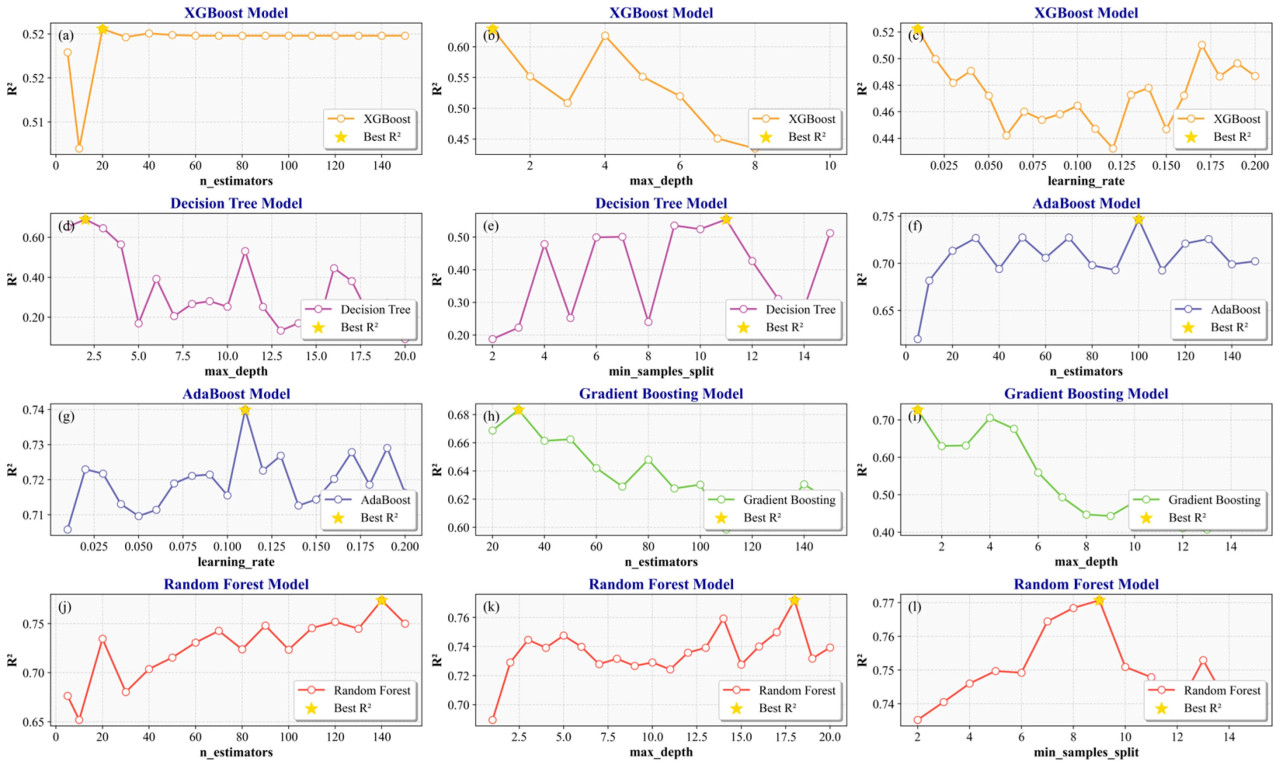
Рисунок 7. Оценки поиска по сетке для каждой модели точного инверсионного определения LAI с использованием режима данных БПЛА. (a–c) Оценка поиска по сетке (R²) для модели XGBoost, (d,e) Оценка поиска по сетке (R²) для модели Decision Tree, (f,g) Оценка поиска по сетке (R²) для модели AdaBoost, (h,i) Оценка поиска по сетке (R²) для модели Gradient Boosting, (j–l) Оценка поиска по сетке (R²) для модели Random Forest.
В Таблице 3 представлены окончательные оптимизированные комбинации гиперпараметров и соответствующие им показатели точности для каждой модели на основе режима данных Fine-fusion и окна выборки признаков 3×3. В сочетании с Рисунком 7, каждая модель достигает улучшения точности и стабильности при оптимальной конфигурации параметров. В качестве примера рассмотрим модель Random Forest: она достигает наилучшего эффекта при конфигурации параметров n_estimators = 140, min_samples_split = 9 и max_depth = 18, с R², достигающим 0,90, а значения MAE и RMSE составляют 0,32 м²/м² и 0,38 м²/м² соответственно. Для моделей AdaBoost и Gradient Boosting их производительность также может быть незначительно улучшена путем настройки гиперпараметров. В целом, путем настройки гиперпараметров каждой модели с помощью поиска по сетке можно улучшить показатели R², MAE и RMSE каждой модели, и каждая модель может оставаться относительно стабильной при оптимальной комбинации гиперпараметров.
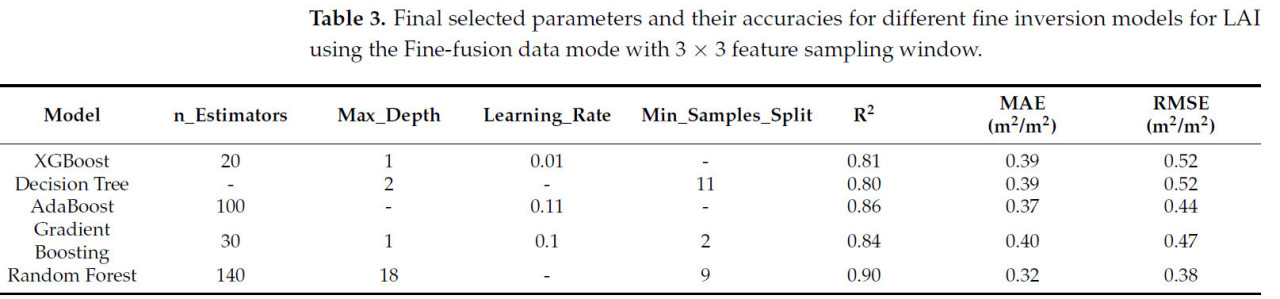
Таблица 3. Окончательно выбранные параметры и их точности для различных моделей точного инверсионного определения LAI с использованием режима данных Fine-fusion и окна выборки признаков 3×3.
3.3. Производительность модели инверсионного определения LAI
3.3.1. Количественная оценка модели точного инверсионного определения LAI
При количественной оценке производительности модели точного инверсионного определения LAI мы используем оптимальное окно выборки признаков, оптимальную комбинацию признаков и оптимальные гиперпараметры модели, а также обучаем и валидируем модель с соотношением обучающей выборки к валидационной 8:2. Как показано на Рисунке 8, модели интегрированного обучения, такие как Random Forest, AdaBoost и Gradient Boosting, демонстрируют относительно высокую точность аппроксимации на протяжении всей стадии роста. Однако R² Decision Tree, Gradient Boosting и XGBoost достигает 1 во время обучения, что указывает на то, что эти модели имеют определенный риск переобучения. Модель линейной регрессии относительно проста и ее легко не переобучить даже при небольшом объеме данных, но точность модели относительно низкая. Точность обучения и точность валидации AdaBoost и Random Forest не сильно различаются, что указывает на то, что эти модели имеют относительно более сильную способность к обобщению, лучшую устойчивость и относительно более высокую точность. Среди них R² алгоритма Random Forest во время обучения составляет 0,95, а RMSE — 0,25 м²/м². R² во время валидации составляет 0,90, а RMSE — 0,38 м²/м², что демонстрирует высокую точность, способную удовлетворить потребности точного инверсионного определения LAI кукурузы.
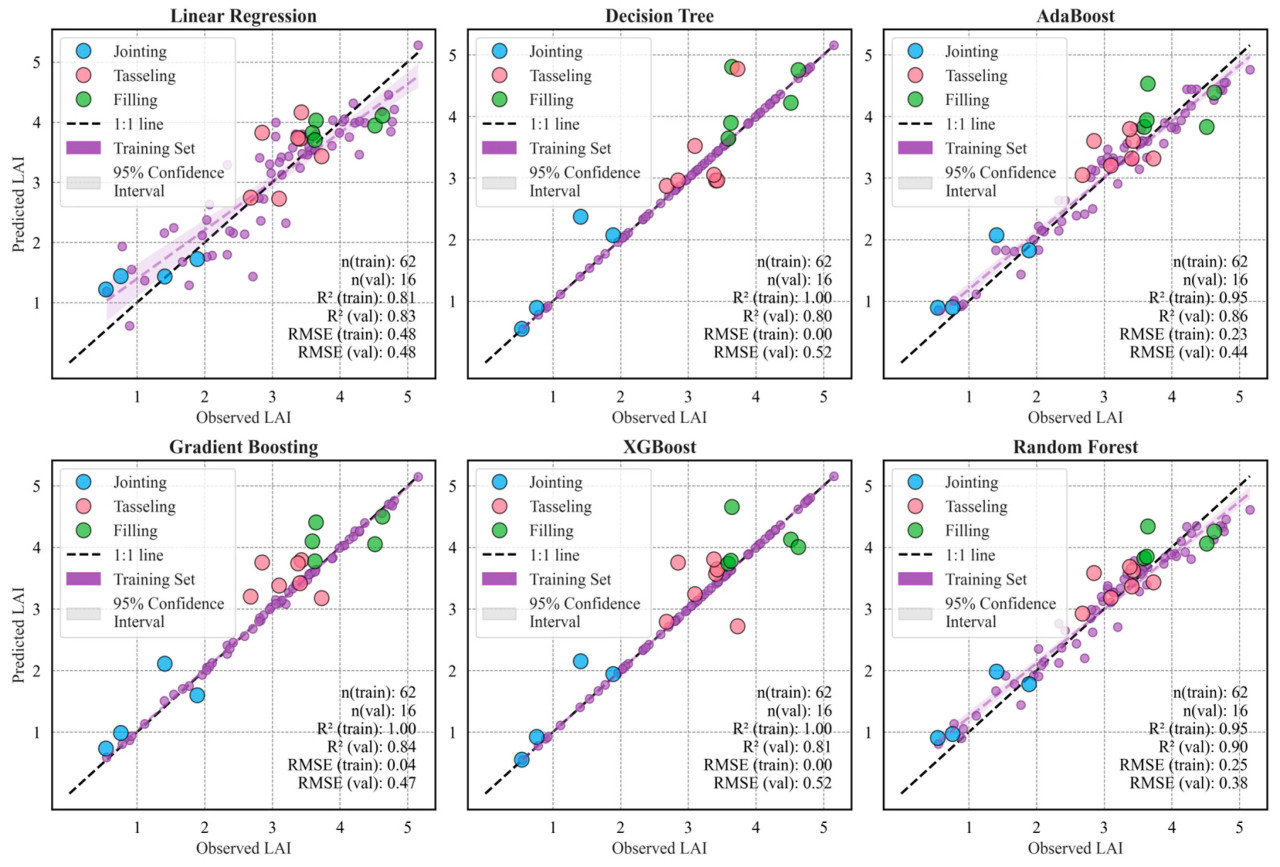
Рисунок 8. Диаграммы рассеяния точности обучения и точности валидации для модели Fine-fusion с шестью моделями инверсионного определения LAI.
Точность инверсии алгоритма Random Forest на различных стадиях роста относительно согласована и сгруппирована вокруг линии 1:1. Точки рассеяния линейной регрессии и Gradient Boosting относительно разбросаны. С точки зрения отдельной модели на разных стадиях роста обнаружено, что эффект аппроксимации модели на стадии смыкания рядов лучше, чем на других стадиях, и точки рассеяния больше сгруппированы вокруг линии 1:1. Точки рассеяния на стадии налива зерна в целом более разбросаны, а точность моделирования также значительно ниже, чем на стадии смыкания рядов (Таблица 4).
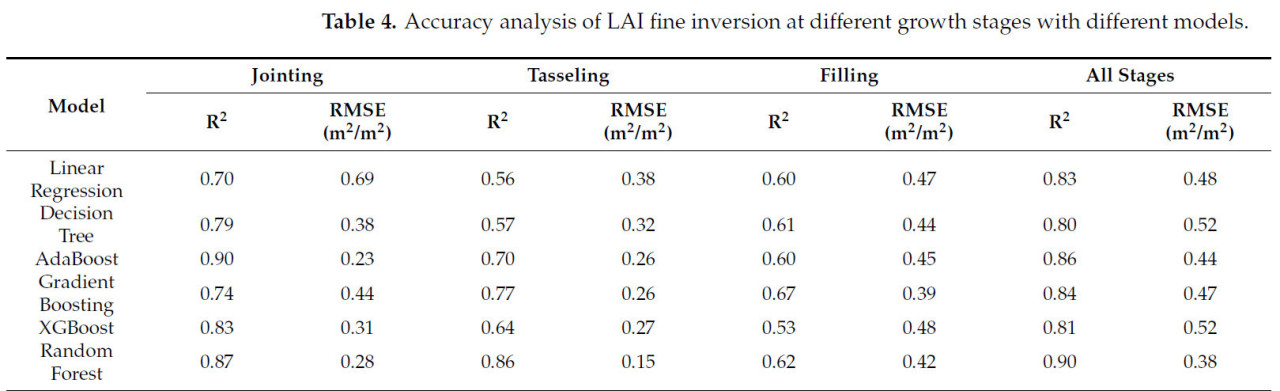
Таблица 4. Анализ точности точного инверсионного определения LAI на разных стадиях роста с помощью разных моделей.
Как показано в Таблице 4, на стадии смыкания рядов R² AdaBoost достигает 0,9, а R² Random Forest достигает 0,87, что значительно выше, чем у модели линейной регрессии (R² = 0,7), что демонстрирует преимущество нелинейной модели в улавливании сложных закономерностей роста растительности. При продольном сравнении производительность модели Random Forest на разных стадиях является относительно выдающейся, что подтверждает ее применимость и стабильность при инверсионном определении LAI кукурузы на разных стадиях роста.
При горизонтальном сравнении точность каждой модели на стадии смыкания рядов лучше, чем на стадии выбрасывания метелок, а точность каждой модели на стадии выбрасывания метелок лучше, чем на стадии налива зерна. Однако из-за недостаточного объема выборочных данных, использованных в этом исследовании, точность каждой модели на отдельной стадии роста в целом ниже, чем при инверсионном определении LAI на протяжении всей стадии роста.
3.3.2. Качественная оценка модели точного инверсионного определения LAI
В этом исследовании используются пять режимов данных: Sentinel-2, БПЛА, Brovey [56], PCA [57] и Fine-fusion. На основе оптимальной комбинации признаков, установленном окне выборки признаков 3×3 и оптимальных гиперпараметрах модели, используется алгоритм Random Forest для инверсионного определения индекса площади листовой поверхности (LAI) на разных стадиях роста. Пространственное распределение LAI на разных стадиях роста при разных режимах данных показано на Рисунке 9. Результаты инверсии показывают, что значения LAI на каждой стадии роста в целом ниже 4,3, что соответствует распределению полевых выборочных данных. При каждом режиме данных с развитием стадии роста значение LAI демонстрирует общую тенденцию к увеличению, что соответствует фактической ситуации роста кукурузы в районе исследования. Распределение LAI, инверсированное с помощью предложенного в этой статье метода слияния данных (Fine-fusion), имеет более выраженную неоднородность и может различать различия в распределении LAI в разные периоды сева. Например, на стадии смыкания рядов рост зоны, засаженной фермером, и зоны первого сева значительно лучше, чем зоны второго сева, а рост зоны второго сева лучше, чем зоны третьего сева (в это время зона второго сева вступила в раннюю стадию выбрасывания метелок), в то время как различия в росте в разные периоды сева при других режимах данных почти неразличимы.
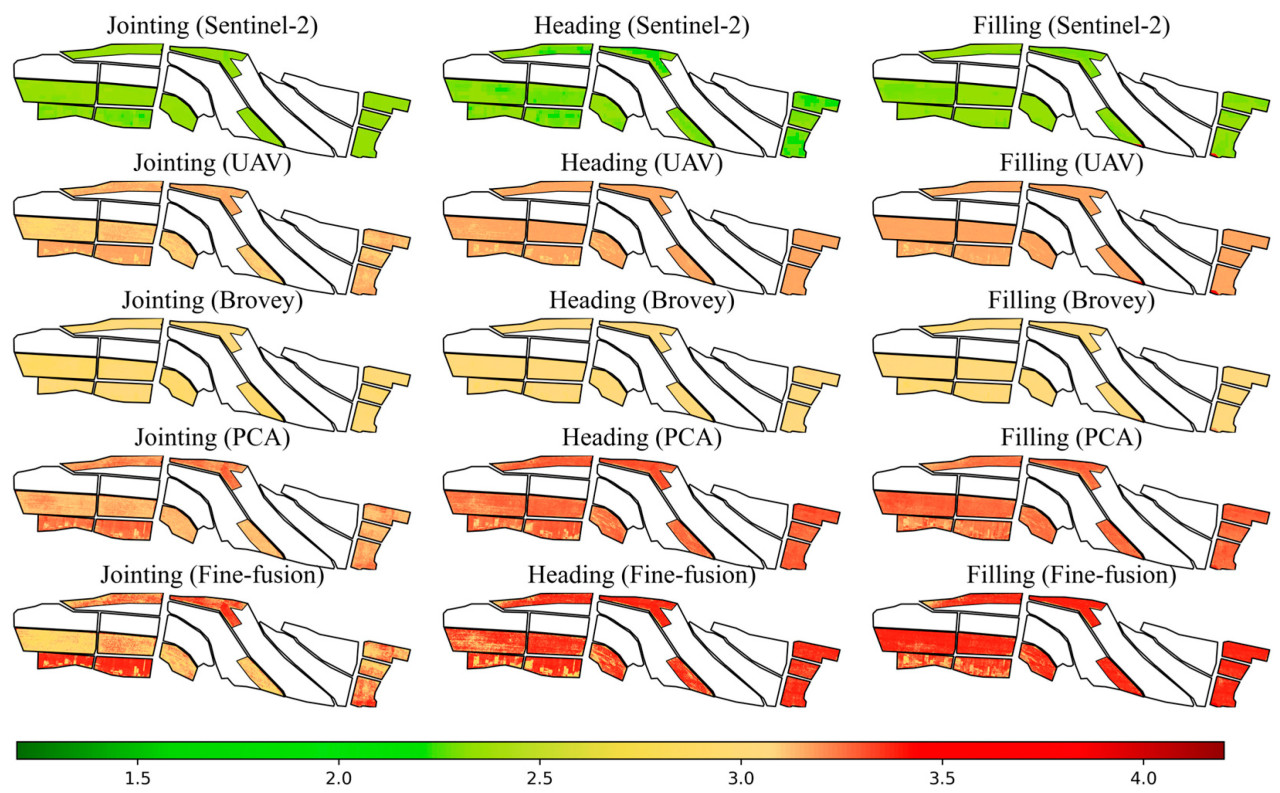
Рисунок 9. Результаты инверсионного определения LAI кукурузы на разных стадиях роста с разными режимами данных. За исключением результатов инверсии в режиме Sentinel-2, которые имеют пространственное разрешение 10 м, пространственное разрешение всех остальных результатов составляет 0,5 м.
LAI, инверсированный с помощью режима данных Sentinel-2, относительно однороден по пространственному распределению из-за его ограниченного пространственного разрешения, а общее значение относительно низкое, что затрудняет эффективное различение детальных различий растительности. В режиме данных БПЛА, хотя степень детализации пространственного распределения LAI относительно высока, детальный эффект инверсии LAI недостаточно хорош, а различия в распределении LAI в разные периоды сева недостаточно очевидны, что указывает на то, что точность инверсии этого режима данных недостаточно высока. Хотя два режима слияния данных, Brovey и PCA, имеют некоторые характеристики изображения БПЛА и изображения Sentinel-2 соответственно, поскольку они напрямую объединяются с повторно дискретизированным изображением Sentinel-2, низкое пространственное разрешение оказывает определенное негативное влияние на эффект слияния, что приводит к потере многих деталей в процессе слияния данных.
На Рисунке 10 показаны локально увеличенные виды результатов инверсионного определения LAI при каждом режиме на стадии выбрасывания метелок, включая исходное и истинное цветное изображение БПЛА с пространственным разрешением 0,5 м, ложное цветное изображение БПЛА и результаты инверсионного определения LAI, соответствующие режимам Sentinel-2, БПЛА, Brovey, PCA и Fine-fusion (пространственное разрешение 0,5 м). Режим Fine-fusion может четко показывать границы растительности и структурные детали. По сравнению с распределением LAI в режиме данных БПЛА, распределение LAI внутри участка кукурузы в этом режиме демонстрирует более значимую информацию о текстурных деталях, что дает ему большее преимущество в отражении состояния растительности внутри участка. Распределение LAI в режиме данных Sentinel-2 относительно однородно. Поскольку точки выборки были установлены только на участке кукурузы, из-за его ограниченного пространственного разрешения значение LAI для голой почвы выше, чем для участка кукурузы, что не соответствует фактической ситуации. Эта характеристика данных затрудняет их прямое применение для мониторинга состояния роста растительности на масштабе делянки, а их низкое пространственное разрешение также не может обеспечивать эффективное руководство для сельскохозяйственного производства. В режимах слияния данных PCA и Brovey можно четко наблюдать влияние Sentinel-2. Среди них режим Brovey значительно больше подвержен влиянию своего принципа слияния, и значение LAI для голой почвы немного выше, чем для участка кукурузы; режим слияния PCA может извлекать важные спектральные признаки объединяемых изображений. Хотя результат инверсионного определения LAI также относительно однороден под влиянием Sentinel-2, текстурная информация LAI все еще видна, что в некоторой степени отражает роль режима PCA в сохранении спектральных признаков во время процесса слияния, что также является причиной, по которой это исследование выбирает метод слияния данных PCA для этапа точного слияния.
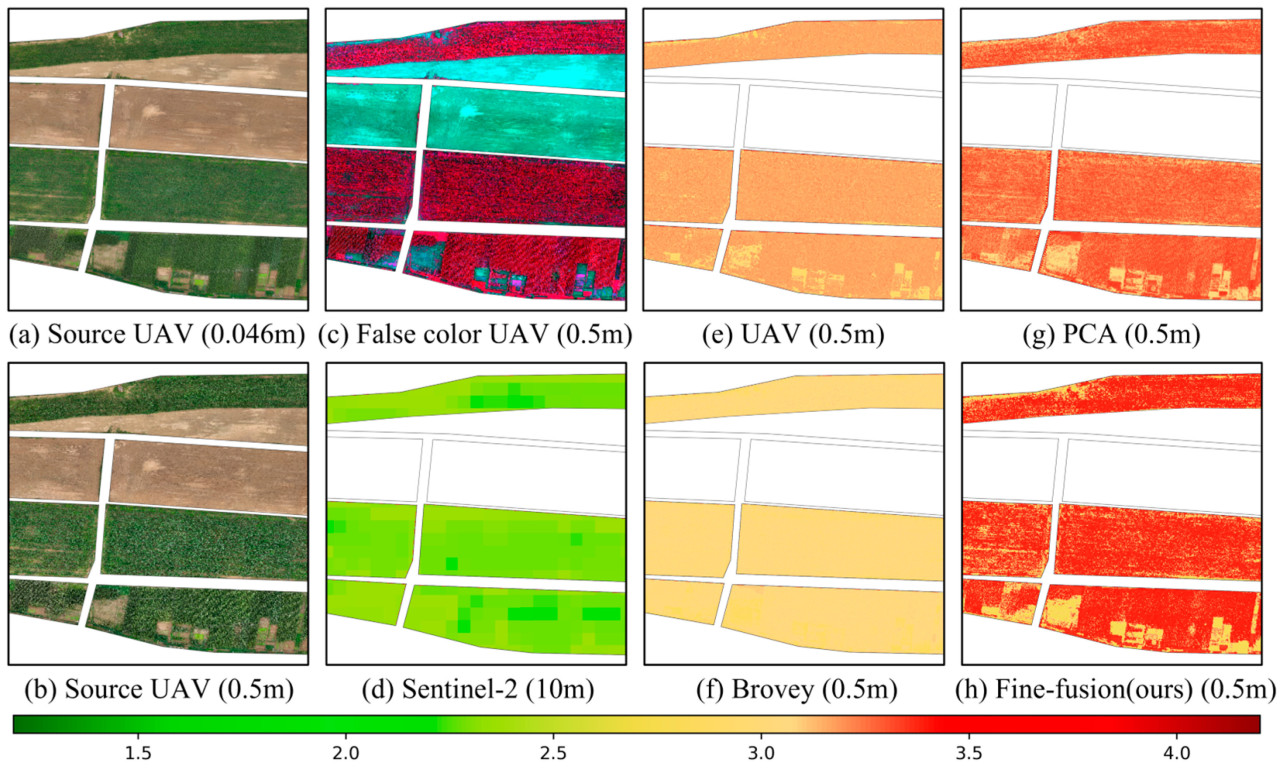
Рисунок 10. Локально увеличенные виды района исследования и LAI, инверсированные с помощью разных режимов данных. (a) Исходное истинное цветное изображение БПЛА, (b) истинное цветное изображение БПЛА, повторно дискретизированное до 0,5 м, (c) исходное ложное цветное изображение БПЛА, (d) LAI, инверсированный в режиме данных Sentinel-2, (e) LAI, инверсированный в режиме данных БПЛА, (f) LAI, инверсированный в режиме данных Brovey, (g) LAI, инверсированный в режиме данных PCA, (h) LAI, инверсированный в режиме данных Fine-fusion. Показанная стадия роста — стадия выбрасывания метелок.
4. Обсуждение
4.1. Извлечение и выбор признаков
Предложенный в этом исследовании двухэтапный метод слияния данных дистанционного зондирования в сочетании с тепловыми инфракрасными изображениями выбирает 9 ключевых признаков на основе модели SHAP. Среди них температура полога вносит наибольший вклад в точное инверсионное определение LAI. Это можно объяснить следующим образом: на ранней стадии роста, при относительно небольшом LAI, температура полога значительно зависит от таких факторов, как температура почвы, что обычно приводит к относительно высокой температуре полога. На поздней стадии роста, когда LAI достигает относительно большого значения, структура полога становится сложной, а внутренний теплообмен и теплообмен с внешней средой изменяются. Закономерность изменения температуры полога отличается от таковой на ранней стадии. Когда содержание воды в сельскохозяйственной культуре относительно достаточно, температура полога обычно ниже, чем у голой почвы.
Два признака, MCARI2 и GCI, также демонстрируют относительно большие положительные SHAP-значения. Эти два признака тесно связаны с содержанием хлорофилла и фотосинтетической активностью растительности. В процессе роста растений содержание хлорофилла и фотосинтетическая активность являются ключевыми факторами, влияющими на LAI. Более высокое содержание хлорофилла обычно указывает на то, что растительность имеет более высокую фотосинтетическую способность, что позволяет ей поддерживать больший рост листьев и, следовательно, приводит к увеличению значения LAI.
В этом исследовании также оптимально выбирается масштаб окна выборки признаков, который связан с фактическим пространственным разрешением каждого режима данных. Хотя изображение Sentinel-2 повторно дискретизируется до 0,5 м, его фактическое пространственное разрешение остается 10 м. Когда размер окна выборки больше, эффект инверсионного определения LAI для этого режима лучше. Учитывая, что пространственное разрешение каждого изображения составляет 0,5 м, когда окно выборки равно 1×1, один растер может даже не покрывать одно растение кукурузы. Когда окно выборки равно 3×3, его покрытие составляет 1,5 м × 1,5 м, что относительно соответствует фактическому диапазону выборки, и точность инверсионного определения LAI при этом масштабе относительно наивысшая.
4.2. Инверсионное определение LAI методами дистанционного зондирования
Путем сравнения самой базовой модели линейной регрессии с различными передовыми моделями машинного обучения или ансамблевого обучения для точного инверсионного определения LAI кукурузы окончательно принят алгоритм Random Forest с наибольшей точностью. Результаты показывают, что R² модели Random Forest для инверсионного определения LAI на протяжении всего периода роста достигает 0,90, а RMSE составляет всего 0,38 м²/м². Точность на разных стадиях роста также демонстрирует наилучшую общую производительность.
Random Forest строит множество деревьев решений и случайным образом выбирает признаки, эффективно снижая риск переобучения и улучшая способность к обобщению. Результаты показывают, что R² модели на протяжении всей стадии роста достигает 0,90, а RMSE составляет всего 0,38 м²/м². По сравнению с моделью Random Forest для инверсионного определения LAI кукурузы на протяжении всей стадии роста, использованной Shuaibing Liu и др. (R² = 0,83) [58], метод в этом исследовании работает лучше. При анализе разных стадий роста R² на стадии смыкания рядов составляет 0,87, 0,86 на стадии выбрасывания метелок и 0,62 на стадии налива зерна. Напротив, R² модели Random Forest в сочетании с тепловыми инфракрасными данными, использованной Xingjiao Yu и др. на стадиях смыкания рядов, выбрасывания метелок и налива зерна кукурузы, составляют 0,726, 0,715 и 0,732 соответственно [59], что указывает на то, что предложенный в этой статье метод имеет большее преимущество на первых двух стадиях роста. Однако точность инверсии на стадии налива зерна относительно низкая, что может быть связано с объемом и качеством данных, и требует дальнейшего изучения в будущих исследованиях.
4.3. Преимущества слияния данных дистанционного зондирования
Предложенный в этом исследовании двухэтапный метод слияния данных дистанционного зондирования сочетает в себе преимущества изображений БПЛА и Sentinel-2: высокое пространственное разрешение БПЛА позволяет четко очерчивать границы между растительностью и голой землей и тонкие структуры внутри поля, в то время как богатая спектральная информация Sentinel-2 помогает точно идентифицировать состояние роста растительности [60]. С точки зрения принципа и процесса слияния данных, новизна этого исследования заключается в двухэтапной стратегии слияния. Во-первых, путем изучения стабильной и богатой спектральной информации Sentinel-2 для генерации высокоразрешающего имитированного «изображения Sentinel-2» достигается грубое слияние; затем изображение, полученное в результате грубого слияния, точно объединяется с исходным изображением БПЛА, а не напрямую объединяются два набора данных с большой разницей в пространственном разрешении, что позволяет избежать проблемы пятен на изображении и потери деталей, вызванной влиянием пространственного разрешения Sentinel-2 в традиционном методе.
На этапе грубого слияния для поиска спектральной взаимосвязи отображения между изображениями БПЛА и Sentinel-2 используются 10 моделей машинного обучения и ансамблевого обучения, что эффективно интегрирует спектральные характеристики двух источников данных. Модель CatBoost работает лучше всего при грубом слиянии. Эта модель является моделью в рамках фреймворка Gradient Boosting, которая может лучше улавливать взаимодействие между признаками и использует различные методы для предотвращения переобучения, обладая хорошей устойчивостью [61]. При грубом слиянии ее средний R² достигает 0,897, а средний MAE составляет всего 0,0009, что указывает на то, что эта модель может точно отображать спектральные характеристики данных БПЛА в пространство, соответствующее данным Sentinel-2, значительно улучшая спектральное разрешение и информационную насыщенность объединенного изображения. На этапе точного слияния метод PCA используется для извлечения главных компонент на основе статистических характеристик данных, уменьшая избыточность данных и выделяя ключевые пространственные признаки [62]. Объединенное изображение не только сохраняет важную спектральную информацию, но и эффективно снижает шум и помехи, предоставляя более полные и точные данные для модели инверсионного определения LAI и значительно улучшая точность инверсии и достоверность деталей.
4.4. Ограничения и будущая работа
С точки зрения сбора данных, объем наземных измеренных образцов в этом исследовании относительно невелик. Хотя процесс выборки основан на вегетационном индексе, рассчитанном по спутниковому изображению Sentinel-2, для разделения на зоны и использует стратифицированную стратегию выборки, из-за таких ограничений, как человеческие ресурсы, материальные ресурсы и время, количество точек выборки все еще недостаточно для полного охвата разнообразия условий роста растительности и почвенных условий в районе исследования [63]. Небольшой размер выборки может привести к тому, что модели будет трудно полностью уловить все потенциальные взаимосвязи и закономерности в процессе обучения, что повлияет на способность к обобщению.
С точки зрения метода слияния данных, в будущем можно попробовать использовать более продвинутые алгоритмы или модели глубокого обучения, такие как сверточные нейронные сети [64], для улучшения способности извлечения признаков изображений и лучшего выявления сложных взаимосвязей в многоданных данных дистанционного зондирования, тем самым повышая точность спектрального отображения. С точки зрения объединяемых источников данных, в будущем можно изучить больше типов модальностей данных дистанционного зондирования, таких как данные LiDAR и гиперспектральные изображения. Для разных масштабов исследования также можно выбирать разные спутниковые данные дистанционного зондирования, например, данные серии Landsat. Кроме того, метод PCA на этапе точного слияния может терять некоторую нелинейную информацию в исходных данных. Будущая работа может быть направлена на изучение методов слияния, которые могут лучше сохранять нелинейные признаки, для дополнительного повышения качества объединенных данных и точности инверсии.
5. Выводы
Это исследование было направлено на решение проблем, связанных с тем, что один источник данных дистанционного зондирования (БПЛА или спутниковый) трудно удовлетворить требованиям высокого пространственного разрешения и полноты и согласованности спектральной информации на масштабе делянки при инверсионном определении индекса площади листовой поверхности (LAI) кукурузы, а также с недостаточно детальной инверсией LAI в сложных местообитаниях. Был предложен метод интерпретируемого точного инверсионного определения LAI путем слияния спутниковых, мультиспектральных изображений БПЛА и тепловых инфракрасных изображений. Это подтвердило эффективность этого метода для инверсионного определения индекса площади листовой поверхности кукурузы и, в то же время, предоставило новые идеи для применения слияния многоданных данных дистанционного зондирования. В будущем этот метод может быть применен для точного управления возделыванием кукурузы, например, для точного составления планов орошения и удобрения. Кроме того, можно попытаться применить эту модель и метод к другим культурам, таким как пшеница и рис. Более того, помимо существующих источников данных, можно провести дальнейшие исследования по слиянию большего количества модальностей данных и спутниковых изображений с разных сенсоров. Конкретные выводы следующие:
1. С помощью предложенного в этой статье двухэтапного метода слияния данных дистанционного зондирования была достигнута комбинация пространственной целостности и согласованности и полноты спектра, что обеспечило высококачественную основу данных для инверсионного определения LAI и значительно повысило точность и достоверность деталей модели инверсии.
2. В условиях оптимального окна выборки признаков 3×3 и 9 признаков, включая температуру полога, точность инверсии модели Random Forest на протяжении всей стадии роста достигает R² = 0,90, RMSE = 0,38 м²/м². По сравнению с режимом данных только БПЛА (R² = 0,73), режим слияния в этой статье увеличивает R² почти на 25%; значения R² на стадиях смыкания рядов, выбрасывания метелок и налива зерна составляют 0,87, 0,86 и 0,62 соответственно, а значения RMSE составляют 0,28 м²/м², 0,15 м²/м² и 0,42 м²/м² соответственно. Одновременно детали внутри участка сохраняются более полно, а различие между зоной голой почвы и участком кукурузы становится более значимым. LAI в разные периоды сева и на разных стадиях роста имеет лучший различающий эффект по сравнению с инверсией по одному источнику изображений.
3. Это исследование подтвердило эффективность тепловых инфракрасных изображений БПЛА в инверсионном определении LAI, что указывает на наличие определенной корреляции между температурой полога и LAI, предоставляя теоретическую основу для точного инверсионного определения LAI путем слияния тепловых инфракрасных данных.
Ссылки
1. Li, Z.; Shen, G.; Hong, T.; Yu, M.; Li, B.; Gu, Y.; Guo, Y.; Han, J. The Nutritive Quality Comparison of the Processed Fresh Sweet-Waxy Corn from Three Regions in China. J. Food Compos. Anal. 2024, 126, 105872. [Google Scholar] [CrossRef]
2. Zhang, Y.; Xia, C.; Zhang, X.; Cheng, X.; Feng, G.; Wang, Y.; Gao, Q. Estimating the Maize Biomass by Crop Height and Narrowband Vegetation Indices Derived from UAV-Based Hyperspectral Images. Ecol. Indic. 2021, 129, 107985. [Google Scholar] [CrossRef]
3. Kalogeropoulos, G.; Elli, E.F.; Trifunovic, S.; Archontoulis, S.V. Historical Increases of Maize Leaf Area Index in the US Corn Belt Due Primarily to Plant Density Increases. Field Crops Res. 2024, 318, 109615. [Google Scholar] [CrossRef]
4. Huang, X.; Lin, D.; Mao, X.; Zhao, Y. Multi-Source Data Fusion for Estimating Maize Leaf Area Index over the Whole Growing Season under Different Mulching and Irrigation Conditions. Field Crops Res. 2023, 303, 109111. [Google Scholar] [CrossRef]
5. Guo, Y.; Hao, F.; Zhang, X.; He, Y.; Fu, Y.H. Improving Maize Yield Estimation by Assimilating UAV-Based LAI into WOFOST Model. Field Crops Res. 2024, 315, 109477. [Google Scholar] [CrossRef]
6. Wang, X.; Ren, J.; Wu, P. Analysis of Growth Variation in Maize Leaf Area Index Based on Time-Series Multispectral Images and Random Forest Models . Agronomy 2024, 14, 2688. [Google Scholar] [CrossRef]
7. Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A Review on UAV-Based Applications for Precision Agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef]
8. Toscano, F.; Fiorentino, C.; Capece, N.; Erra, U.; Travascia, D.; Scopa, A.; Drosos, M.; D’Antonio, P. Unmanned Aerial Vehicle for Precision Agriculture: A Review. IEEE Access 2024, 12, 69188–69205. [Google Scholar] [CrossRef]
9. Gao, X.; Yao, Y.; Chen, S.; Li, Q.; Zhang, X.; Liu, Z.; Zeng, Y.; Ma, Y.; Zhao, Y.; Li, S. Improved Maize Leaf Area Index Inversion Combining Plant Height Corrected Resampling Size and Random Forest Model Using UAV Images at Fine Scale. Eur. J. Agron. 2024, 161, 127360. [Google Scholar] [CrossRef]
10. Parida, P.K.; Somasundaram, E.; Krishnan, R.; Radhamani, S.; Sivakumar, U.; Parameswari, E.; Raja, R.; Shri Rangasami, S.R.; Sangeetha, S.P.; Gangai Selvi, R. Unmanned Aerial Vehicle-Measured Multispectral Vegetation Indices for Predicting LAI, SPAD Chlorophyll, and Yield of Maize. Agriculture 2024, 14, 1110. [Google Scholar] [CrossRef]
11. Guo, A.; Ye, H.; Huang, W.; Qian, B.; Wang, J.; Lan, Y.; Wang, S. Inversion of Maize Leaf Area Index from UAV Hyperspectral and Multispectral Imagery. Comput. Electron. Agric. 2023, 212, 108020. [Google Scholar] [CrossRef]
12. Wang, Y.; Wang, P.; Tansey, K.; Liu, J.; Delaney, B.; Quan, W. An Interpretable Approach Combining Shapley Additive Explanations and LightGBM Based on Data Augmentation for Improving Wheat Yield Estimates. Comput. Electron. Agric. 2025, 229, 109758. [Google Scholar] [CrossRef]
13. Ming, L.; Wang, Y.; Liu, G.; Meng, L.; Chen, X. Analysis of Vegetation Dynamics from 2001 to 2020 in China’s Ganzhou Rare Earth Mining Area Using Time Series Remote Sensing and SHAP-Enhanced Machine Learning. Ecol. Inform. 2024, 84, 102887. [Google Scholar] [CrossRef]
14. Yan, P.; Feng, Y.; Han, Q.; Hu, Z.; Huang, X.; Su, K.; Kang, S. Enhanced Cotton Chlorophyll Content Estimation with UAV Multispectral and LiDAR Constrained SCOPE Model. Int. J. Appl. Earth Obs. Geoinf. 2024, 132, 104052. [Google Scholar] [CrossRef]
15. Ma, H.; Song, J.; Wang, J.; Xiao, Z.; Fu, Z. Improvement of Spatially Continuous Forest LAI Retrieval by Integration of Discrete Airborne LiDAR and Remote Sensing Multi-Angle Optical Data. Agric. For. Meteorol. 2014, 189–190, 60–70. [Google Scholar] [CrossRef]
16. Rivera, G.; Porras, R.; Florencia, R.; Sánchez-Solís, J.P. LiDAR Applications in Precision Agriculture for Cultivating Crops: A Review of Recent Advances. Comput. Electron. Agric. 2023, 207, 107737. [Google Scholar] [CrossRef]
17. Yang, H.; Wang, L.; Zhang, X.; Shi, Y.; Wu, Y.; Jiang, Y.; Wang, X. Exploring Optimal Soil Moisture for Seedling Tomatoes Using Thermal Infrared Imaging and Chlorophyll Fluorescence Techniques. Sci. Hortic. 2025, 339, 113846. [Google Scholar] [CrossRef]
18. Kukal, M.; Irmak, S. Transpiration Dynamics in Co-Located Maize, Sorghum, and Soybean Closed Canopies and Their Environmental Controls. J. Nat. Resour. Agric. Ecosyst. 2024, 2, 1–15. [Google Scholar] [CrossRef]
19. Jiang, J.; Zhang, Q.; Wang, W.; Wu, Y.; Zheng, H.; Yao, X.; Zhu, Y.; Cao, W.; Cheng, T. MACA: A Relative Radiometric Correction Method for Multiflight Unmanned Aerial Vehicle Images Based on Concurrent Satellite Imagery. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–14. [Google Scholar] [CrossRef]
20. Dong, T.; Liu, J.; Qian, B.; Zhao, T.; Jing, Q.; Geng, X.; Wang, J.; Huffman, T.; Shang, J. Estimating Winter Wheat Biomass by Assimilating Leaf Area Index Derived from Fusion of Landsat-8 and MODIS Data. Int. J. Appl. Earth Obs. Geoinf. 2016, 49, 63–74. [Google Scholar] [CrossRef]
21. Liu, T.; Duan, S.-B.; Liu, N.; Wei, B.; Yang, J.; Chen, J.; Zhang, L. Estimation of Crop Leaf Area Index Based on Sentinel-2 Images and PROSAIL-Transformer Coupling Model. Comput. Electron. Agric. 2024, 227, 109663. [Google Scholar] [CrossRef]
22. Delavarpour, N.; Koparan, C.; Nowatzki, J.; Bajwa, S.; Sun, X. A Technical Study on UAV Characteristics for Precision Agriculture Applications and Associated Practical Challenges. Remote Sens. 2021, 13, 1204. [Google Scholar] [CrossRef]
23. Li, Y.; Ma, Q.; Chen, J.; Croft, H.; Luo, X.; Zheng, T.; Rogers, C.; Liu, J. Fine-Scale Leaf Chlorophyll Distribution across a Deciduous Forest through Two-Step Model Inversion from Sentinel-2 Data. Remote Sens. Environ. 2021, 264, 112618. [Google Scholar] [CrossRef]
24. Radoglou-Grammatikis, P.; Sarigiannidis, P.; Lagkas, T.; Moscholios, I. A Compilation of UAV Applications for Precision Agriculture. Comput. Netw. 2020, 172, 107148. [Google Scholar] [CrossRef]
25. Alvarez-Vanhard, E.; Corpetti, T.; Houet, T. UAV & Satellite Synergies for Optical Remote Sensing Applications: A Literature Review. Sci. Remote Sens. 2021, 3, 100019. [Google Scholar] [CrossRef]
26. Popescu, D.; Stoican, F.; Stamatescu, G.; Ichim, L.; Dragana, C. Advanced UAV–WSN System for Intelligent Monitoring in Precision Agriculture. Sensors 2020, 20, 817. [Google Scholar] [CrossRef]
27. Zhang, L.; Shen, H. Progress and Future of Remote Sensing Data Fusion. Natl. Remote Sens. Bull. 2016, 20, 1050–1061. [Google Scholar] [CrossRef]
28. Chen, Y.; Zhao, M.; Bruzzone, L. A Novel Approach to Incomplete Multimodal Learning for Remote Sensing Data Fusion. IEEE Trans. Geosci. Remote Sens. 2024, 62, 1–14. [Google Scholar] [CrossRef]
29. Jing, W.; Lou, T.; Wang, Z.; Zou, W.; Xu, Z.; Mohaisen, L.; Li, C.; Wang, J. A Rigorously-Incremental Spatiotemporal Data Fusion Method for Fusing Remote Sensing Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 6723–6738. [Google Scholar] [CrossRef]
30. Yin, Z.; Wu, P.; Li, X.; Hao, Z.; Ma, X.; Fan, R.; Liu, C.; Ling, F. Super-Resolution Water Body Mapping with a Feature Collaborative CNN Model by Fusing Sentinel-1 and Sentinel-2 Images. Int. J. Appl. Earth Obs. Geoinf. 2024, 134, 104176. [Google Scholar] [CrossRef]
31. Abunnasr, Y.; Mhawej, M. Towards a Combined Landsat-8 and Sentinel-2 for 10-m Land Surface Temperature Products: The Google Earth Engine Monthly Ten-ST-GEE System. Environ. Model. Softw. 2022, 155, 105456. [Google Scholar] [CrossRef]
32. Shi, W.; Li, Y.; Zhang, W.; Yu, C.; Zhao, C.; Qiu, J. Monitoring and Zoning Soybean Maturity Using UAV Remote Sensing. Ind. Crops Prod. 2024, 222, 119470. [Google Scholar] [CrossRef]
33. Xin, J.; Ming, B.; Xue, B.; Yang, H.; Guo, H.; Feng, D.; Xie, R.; Wang, K.; Hou, P.; Li, S.; et al. Unmanned Aerial Vehicle Multispectral Remote Sensing for Monitoring of Nitrogen Nutritional Indicators in High-Yielding Spring Maize in Northeast China. J. Maize Sci. 2024, 32, 92–101. [Google Scholar] [CrossRef]
34. Ajin, R.S.; Segoni, S.; Fanti, R. Optimization of SVR and CatBoost Models Using Metaheuristic Algorithms to Assess Landslide Susceptibility. Sci. Rep. 2024, 14, 24851. [Google Scholar] [CrossRef] [PubMed]
35. Usta, A. Prediction of Soil Water Contents and Erodibility Indices Based on Artificial Neural Networks: Using Topography and Remote Sensing. Environ. Monit. Assess. 2022, 194, 794. [Google Scholar] [CrossRef]
36. Li, X.; Jia, H.; Wang, L. Remote Sensing Monitoring of Drought in Southwest China Using Random Forest and eXtreme Gradient Boosting Methods. Remote Sens. 2023, 15, 4840. [Google Scholar] [CrossRef]
37. Jiang, Z.; Huete, A.; Kim, Y.; Didan, K. 2-Band Enhanced Vegetation Index without a Blue Band and Its Application to AVHRR Data. Proc. SPIE—Int. Soc. Opt. Eng. 2007, 6679, 45–53. [Google Scholar] [CrossRef]
38. Roujean, J.-L.; Breon, F.-M. Estimating PAR Absorbed by Vegetation from Bidirectional Reflectance Measurements. Remote Sens. Environ. 1995, 51, 375–384. [Google Scholar] [CrossRef]
39. Lu, J.; Miao, Y.; Shi, W.; Li, J.; Yuan, F. Evaluating Different Approaches to Non-Destructive Nitrogen Status Diagnosis of Rice Using Portable RapidSCAN Active Canopy Sensor. Sci. Rep. 2017, 7, 14073. [Google Scholar] [CrossRef]
40. Beck, P.S.A.; Atzberger, C.; Høgda, K.A.; Johansen, B.; Skidmore, A.K. Improved Monitoring of Vegetation Dynamics at Very High Latitudes: A New Method Using MODIS NDVI. Remote Sens. Environ. 2006, 100, 321–334. [Google Scholar] [CrossRef]
41. Jordan, C.F. Derivation of Leaf-Area Index from Quality of Light on the Forest Floor. Ecology 1969, 50, 663–666. [Google Scholar] [CrossRef]
42. Gitelson, A.A.; Viña, A.; Ciganda, V.; Rundquist, D.C.; Arkebauer, T.J. Remote Estimation of Canopy Chlorophyll Content in Crops. Geophys. Res. Lett. 2005, 32, GL022688. [Google Scholar] [CrossRef]
43. Gitelson, A.A.; Kaufman, Y.J.; Merzlyak, M.N. Use of a Green Channel in Remote Sensing of Global Vegetation from EOS-MODIS. Remote Sens. Environ. 1996, 58, 289–298. [Google Scholar] [CrossRef]
44. Sharifi, A.; Felegari, S. Remotely Sensed Normalized Difference Red-Edge Index for Rangeland Biomass Estimation. Aircr. Eng. Aerosp. Technol. 2023, 95, 1128–1136. [Google Scholar] [CrossRef]
45. Sripada, R.P.; Heiniger, R.W.; White, J.G.; Meijer, A.D. Aerial Color Infrared Photography for Determining Early In-Season Nitrogen Requirements in Corn. Agron. J. 2006, 98, 968–977. [Google Scholar] [CrossRef]
46. Elsayed, S.; Rischbeck, P.; Schmidhalter, U. Comparing the Performance of Active and Passive Reflectance Sensors to Assess the Normalized Relative Canopy Temperature and Grain Yield of Drought-Stressed Barley Cultivars. Field Crops Res. 2015, 177, 148–160. [Google Scholar] [CrossRef]
47. Erdle, K.; Mistele, B.; Schmidhalter, U. Comparison of Active and Passive Spectral Sensors in Discriminating Biomass Parameters and Nitrogen Status in Wheat Cultivars. Field Crops Res. 2011, 124, 74–84. [Google Scholar] [CrossRef]
48. McFeeters, S.K. The Use of the Normalized Difference Water Index (NDWI) in the Delineation of Open Water Features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
49. Qi, J.; Chehbouni, A.; Huete, A.; Kerr, Y.; Sorooshian, S. A Modified Soil Adjusted Vegetation Index. Remote Sens. Environ. 1994, 48, 119–126. [Google Scholar] [CrossRef]
50. Huete, A.R. A Soil-Adjusted Vegetation Index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
51. Cui, X.; Wang, C.; An, S.; Qian, Y. Adaptive Fuzzy Neighborhood Decision Tree. Appl. Soft Comput. 2024, 167, 112435. [Google Scholar] [CrossRef]
52. Yousefi, M.; Oskoei, V.; Esmaeli, H.R.; Baziar, M. An Innovative Combination of Extra Trees within Adaboost for Accurate Prediction of Agricultural Water Quality Indices. Results Eng. 2024, 24, 103534. [Google Scholar] [CrossRef]
53. Fan, J.; Zheng, J.; Wu, L.; Zhang, F. Estimation of Daily Maize Transpiration Using Support Vector Machines, Extreme Gradient Boosting, Artificial and Deep Neural Networks Models. Agric. Water Manag. 2021, 245, 106547. [Google Scholar] [CrossRef]
54. Li, Y.; Zeng, H.; Zhang, M.; Wu, B.; Zhao, Y.; Yao, X.; Cheng, T.; Qin, X.; Wu, F. A County-Level Soybean Yield Prediction Framework Coupled with XGBoost and Multidimensional Feature Engineering. Int. J. Appl. Earth Obs. Geoinf. 2023, 118, 103269. [Google Scholar] [CrossRef]
55. Huang, M. Theory and Implementation of Linear Regression. In Proceedings of the 2020 International Conference on Computer Vision, Image and Deep Learning (CVIDL), Chongqing, China, 10–12 July 2020; pp. 210–217. [Google Scholar]
56. Chandrasekaran, V. A Segmentation Method of Fused Multispectral and Panchromatic Images Using Quick Shift Algorithm and Brovey Transform. Int. J. Eng. Adv. Technol. 2019, 9, 486–494. [Google Scholar] [CrossRef]
57. Wu, Z.; Huang, Y.; Zhang, K. Remote Sensing Image Fusion Method Based on PCA and Curvelet Transform. J. Indian Soc. Remote Sens. 2018, 46, 687–695. [Google Scholar] [CrossRef]
58. Liu, S.; Jin, X.; Bai, Y.; Wu, W.; Cui, N.; Cheng, M.; Liu, Y.; Meng, L.; Jia, X.; Nie, C.; et al. UAV Multispectral Images for Accurate Estimation of the Maize LAI Considering the Effect of Soil Background. Int. J. Appl. Earth Obs. Geoinf. 2023, 121, 103383. [Google Scholar] [CrossRef]
59. Yu, X.; Huo, X.; Qian, L.; Du, Y.; Liu, D.; Cao, Q.; Wang, W.; Hu, X.; Yang, X.; Fan, S. Combining UAV Multispectral and Thermal Infrared Data for Maize Growth Parameter Estimation. Agriculture 2024, 14, 2004. [Google Scholar] [CrossRef]
60. Li, W.; Jiang, J.; Guo, T.; Zhou, M.; Tang, P.; Wang, Y.; Zhang, Y.; Cheng, T.; Zhu, Y.; Cao, W.; et al. Generating Red-Edge Images at 3 M Spatial Resolution by Fusing Sentinel-2 and Planet Satellite Products. Remote Sens. 2019, 11, 1422. [Google Scholar] [CrossRef]
61. Zhai, W.; Li, C.; Fei, S.; Liu, Y.; Ding, F.; Cheng, Q.; Chen, Z. CatBoost Algorithm for Estimating Maize Above-Ground Biomass Using Unmanned Aerial Vehicle-Based Multi-Source Sensor Data and SPAD Values. Comput. Electron. Agric. 2023, 214, 108306. [Google Scholar] [CrossRef]
62. Yang, W.; Wang, J.; Guo, J. A Novel Algorithm for Satellite Images Fusion Based on Compressed Sensing and PCA. Math. Probl. Eng. 2013, 2013, 708985. [Google Scholar] [CrossRef]
63. Jia, Y.; Gao, J.; Huang, W.; Yuan, Y.; Wang, Q. Exploring Hard Samples in Multi-View for Few-Shot Remote Sensing Scene Classification. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–14. [Google Scholar] [CrossRef]
64. Li, X.; He, H.; Shi, J. HDCCT: Hybrid Densely Connected CNN and Transformer for Infrared and Visible Image Fusion. Electronics 2024, 13, 3470. [Google Scholar] [CrossRef]
Yao Y, Wang H, Yang X, Gao X, Yang S, Zhao Y, Li S, Zhang X, Liu Z. Interpretable LAI Fine Inversion of Maize by Fusing Satellite, UAV Multispectral, and Thermal Infrared Images. Agriculture. 2025; 15(3):243. https://doi.org/10.3390/agriculture15030243
Перевод статьи «Interpretable LAI Fine Inversion of Maize by Fusing Satellite, UAV Multispectral, and Thermal Infrared Images» авторов Yao Y, Wang H, Yang X, Gao X, Yang S, Zhao Y, Li S, Zhang X, Liu Z., оригинал доступен по ссылке. Лицензия: CC BY. Изменения: переведено на русский язык
Фото: freepik

















































































































Комментарии (0)